双目立体视觉的水下应用
基于双目视觉的水下连接器位姿测量方法

舰船科学技术SHIP SCIENCE AND TECHNOLOGY第43卷第4期2021年4月Vol. 43, No. 4Apr., 2021基于双目视觉的水下连接器位姿测量方法陈瑞,王旭阳(上海交通大学船舶海洋与建筑工程学院,上海200240)摘 要:水下连接器的对接作业是水下工程作业的重要环节,针对目前依靠摄像机传回视频进行作业过程中 存在的操作难度大、依赖操作员经验的问题,设计基于双目视觉的水下连接器位姿测量方法。
该方法首先根据水下 连接器的颜色特征确定检测范围,之后在检测范围中以水下连接器为模板进行初步定位,然后根据水下连接器端面的成像特点检测椭圆特征,并进行双目匹配获得相关三维点坐标,最后计算得出水下连接器的位姿。
实验表明,该 方法位置测量平均误差1.3%,姿态测量平均误差3.5°,可以较好地为水下连接器对接作业提供参考。
关键词:水下作业;双目视觉;双目匹配;位姿测量中图分类号:TP242.3 文献标识码:A文章编号:1672 - 7649(2021)04 - 0064 - 04 doi : 10.3404/j.issn.l672 - 7649.2021.04.013Pose measurement method of underwater connector based on binocular visionCHEN Rui, WANG Xu-yang(School of N aval Architecture, Ocean and Civil Engineering, Shanghai Jiaotong University, Shanghai 200240, China)Abstract: The docking operation of underwater connectors is an important part of underwater engineering operations.In view of the problems existing in the operation process of relying on the video returned by the camera, such as the diffi culty of operation and the dependence on the operator's experience, a method of underwater connector pose measurementbased on binocular vision is designed. This method firstly determines the detection range according to the color characterist ics of the underwater connector, and then uses the underwater connector as the template for preliminary positioning in the de tection range, then detects the ellipse characteristics of the end face of the underwater connector, and carries out binocular matching to obtain the relevant three-dimensional point coordinates, and finally calculates the position and orientation of theunderwater connector.Experiments show that this method has an average position measurement error of 1.3% and an attitude measurement average error of 3.5°, which can provide a good reference for underwater connector docking operations.Key words: underwater operation ; binocular vision ; binocular matching ; pose measurement0引言随着我国经济的快速发展,海上运输量逐年大幅度增长,船舶碰撞事故时有发生,因此出于海洋环保的需要,必须将沉船携带或装载的大量燃油或液体危险化学品回收,否则会造成严重的海洋污染事件。
计算机视觉技术在海洋监测中的应用案例分享
计算机视觉技术在海洋监测中的应用案例分享近年来,计算机视觉技术在海洋监测中的应用越来越广泛。
随着科技的发展和计算能力的提升,计算机视觉技术的应用已经超出了人们的想象。
本文将介绍一些在海洋监测中应用计算机视觉技术的成功案例,展示了其在海洋领域的巨大潜力。
首先,计算机视觉技术在海洋生物调查中起到了重要作用。
传统的海洋生物调查通常需要人工采集和分析样本,费时费力。
而有了计算机视觉技术,可以通过图像识别和分析来快速、准确地识别和计数海洋生物。
例如,研究人员利用计算机视觉技术开发了一种可以实时识别鲨鱼的系统。
该系统利用摄像头对海洋进行实时监测,通过计算机视觉算法对海洋中出现的鲨鱼进行自动识别和计数。
这大大提高了鲨鱼调查的效率和准确性,帮助研究人员更好地了解鲨鱼的栖息地和分布情况,为保护鲨鱼资源提供了有力的支持。
其次,计算机视觉技术在海洋环境监测和污染物检测中也发挥了重要的作用。
海洋环境监测需要对大量的海洋图像进行处理和分析,以了解海洋的生态系统状况和环境污染情况。
利用计算机视觉技术,可以自动识别海洋中的各类生物和物质,并对环境污染进行监测和预警。
例如,有研究人员开发了一种基于图像识别的海洋垃圾监测系统,该系统能够自动识别和计数海洋中的垃圾,并实时报警。
这种技术的应用可以帮助管理者及时发现和清理海洋中的垃圾,保护海洋生态环境的健康。
此外,计算机视觉技术在海洋资源勘探和海底地质调查中也起到了关键作用。
传统的勘探和调查方法通常需要进行人工观察和测量,工作量庞大且效率低下。
而利用计算机视觉技术,可以通过处理海洋图像和视频数据来提取有用信息,快速评估海洋资源和地质特征。
比如,在海底矿产资源勘探中,计算机视觉技术可以识别和测量海底矿物,分析其分布和特征。
这些信息对于资源评估和开发规划具有重要意义,可以为海洋矿产资源的管理和利用提供科学依据。
最后,计算机视觉技术还广泛应用于海洋自动化设备和机器人的发展中。
海洋环境复杂且危险,对人类的生命安全和健康构成极大挑战。
水下视觉特征检测方法

水下视觉特征检测方法下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!Download tips: This document is carefully compiled by theeditor. l hope that after you downloadthem,they can help yousolve practical problems. The document can be customized andmodified afterdownloading,please adjust and use it according toactual needs, thank you!水下视觉特征检测方法:基于双目视觉的流程为例①图像采集:利用双目摄像头在水下环境中同步拍摄目标物体,获取左、右两幅图像。
双目设置有助于增加深度感知能力。
②预处理:对采集到的图像进行去噪、增强和校正,以减少水下环境特有的光照衰减、散射和色彩失真影响,提升图像质量。
③特征匹配:在左右图像中识别并匹配特征点,常用算法如SIFT、ORB等,这些特征点对于后续的三维重建至关重要。
④立体视觉重构:利用匹配的特征点计算视差图,进而恢复目标物体的三维空间信息,包括距离、尺寸和形状。
⑤目标检测与识别:基于重构的三维信息,提取目标物体的轮廓和纹理特征,运用机器学习或深度学习算法(如卷积神经网络)进行目标识别和分类。
⑥距离与尺寸估算:利用双目系统的基线长度和视差计算目标的精确距离和尺寸,提升检测精度。
⑦输出描述信息:根据上述步骤得到的立体视觉信息,输出目标的详细描述信息,包括位置、姿态和类型等,为后续的水下作业或科学研究提供依据。
该流程克服了单目视觉在水下测距和立体成像上的局限性,有效提高了水下目标检测的准确性和鲁棒性。
基于立体视觉的水下三维测量系统研究

基于立体视觉的水下三维测量系统研究张洪龙;陈涛;庄培钦;周志盛;宋展;焦国华;乔宇【摘要】随着我国海洋战略的提出,对于海洋观测技术和装备的需求日趋迫切.针对现有水下成像系统无法实现精确三维测量这一难题,该文提出了一种基于双目立体视觉原理的水下三维测量系统研究方法,并对其可行性进行了验证.针对水下成像过程存在的水体界面折射问题,该文提出了相应的相机成像模型及系统参数标定方法,建立了防水深度达30m的双目水下测量及照明装置,并在水池、近海条件下进行了实地测试.实验结果显示,在水体条件较好的情况下,系统观测距离可达8m以上,有效测量距离为0.5~4.5 m,在0.5 m和4.5m距离处的测量误差分别为2 mm和20 mm.实验验证了水下双目成像模型、立体标定、测量模型等方法的有效性和精确性,可为水下检修作业等海洋工程行业提供一种有效的三维测量技术手段.【期刊名称】《集成技术》【年(卷),期】2018(007)003【总页数】14页(P1-14)【关键词】立体视觉;水下测量;三维重建;视觉测量【作者】张洪龙;陈涛;庄培钦;周志盛;宋展;焦国华;乔宇【作者单位】中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院大学深圳先进技术学院深圳518055;中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院大学深圳先进技术学院深圳518055;中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院大学深圳先进技术学院深圳518055;中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院大学深圳先进技术学院深圳518055;中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院大学深圳先进技术学院深圳518055;中国科学院深圳先进技术研究院深圳市虚拟现实与人机交互重点实验室深圳518055;中国科学院大学深圳先进技术学院深圳518055【正文语种】中文【中图分类】TP391.41 引言作为海洋研究的一项基础技术,水下视觉测量技术已经得到众多研究者的关注。
水下目标探测与识别技术

2.3.5 选通ICCD摄像机的方法
❖ ICCD摄像机主要分为非选通型和选通型两类: ❖ 非选通ICCD摄像机本身没有光快门,不具有快速开关的功能,
主要用于对微弱光图像信号的增强和放大; ❖ 选通ICCD摄像机是由具有快速开关功能的像增强器通过光纤
光在水下的衰减
❖ 水对光谱中紫外和红外部分表现出强烈 的吸收。这是由于水分子在这些谱带上 强烈的共振造成的。紫外共振起因于电 子的激发,红外共振起因于分子激发。
❖ 大部分波段的光在水下传播时都会受到强烈的吸收衰减,只有波长 在 0.5nm 左右波段的蓝绿光在水中的吸收衰减系数最小,穿透能力 最强,而且此波段又处于电磁波的“大气窗口”。
实现方法:
❖ Matlab图像处理函数; ❖ VC6.0以上版本编程; ❖ OpenCV(Open Source Computer Vision Library)专
业图像处理软件,结合Visual Studio 2005以上版本实现; ❖ Kinect , OpenGL ( Graphics Library ) , OpenNI
长基线带来的问题:
❖ 但实际上,长基线会引起下面两个问题: ❖ 引起双目系统联合视域缩小。随着基线的增加,区域离双目摄像机
会越来越远,使这个距离内的目标不可见。换用大视角镜头可以克 服这个难题,但同时大视角镜头又会引发严重畸变等其他问题。 ❖ 增加立体匹配的难度。两个摄像机分别从不同角度观察同一目标, 所以观察到的目标有轻微不同,当基线加长,两摄像机观察到的目 标的差异增大,两幅图像的相关性下降,导致立体匹配更加困难。
❖ 在该系统中,非常短的激光脉冲照射物体,照相机快门打开的时间相 对于照射物体的激光发射时间有一定的延迟,并且快门打开的时间很 短,在这段时间内,探测器接收从物体返回的光束,从而排除了大部 分的后向散射光。
基于双目视觉的水下定位系统

Bi o u a ii n b s d l c tng s se o nd r t r i s c i n n c l r v so a e o a i y t m f r u e wa e n pe to
C N Y a — e HU K n — U,G a —h n ,GU Lny HE u nj ,Z a gW i E Y oz eg i—i
机 、 行器 ( 机 械 手 , 执 如 电机 等 ) 组 成 。在 该 实 验 系 等
究 中心学 者将 目标 物体结 构模 型 法单 目视 觉应 用 于水 下机 器人 定位 。文献 [ ] 4 中英 国学 者 N H ln h r 等 . ol g us i t 人利用双 目视觉 控 制机 械 手抓 取物 体 , 文献 [ - ] 别 56 分 将双 目立体视 觉应用 于 曲线跟踪 和水下焊缝 的跟踪 。
应用 在单 目视 觉 定 位 上 , 献 [ ] 中 国船 舶 科 学 研 文 3 中
1 双 目立 体 视 觉 定 位 系 统 构 成
机器 视 觉 系 统 的 硬 件 一 般 由 视 觉 传 感 器 ( 像 摄 机)光源 、 、 滤光 片 、 图像 采 集 卡 、 图像 处 理 模 块 、 算 计
( V) nod rt d p h o lxu d r tre vrn ln ,asaigsr cuefrtec mea to fu d r ae airt n a d RO .I r e oa a t ec mpe n ewae n io ne t e l tu tr h a r ,a meh d o n e trcl ai n t n o w b o
anwm to b c lct g ae nf n aa e paet nf m t nw r ds nd xei et eutso e cuayads b i e e do oj toan sdo o t rl l ln as r ai e ei e .E pr n sl wt crc n ait h f e i b r p l r o o e g m r sh h a t ly
计算机视觉在海洋探索的贡献
计算机视觉在海洋探索的贡献在人类探索未知的征程中,海洋一直是那片神秘而广阔的领域。
随着科技的不断进步,计算机视觉技术的出现为海洋探索带来了前所未有的机遇和突破。
计算机视觉技术,简单来说,就是让计算机能够像人类的眼睛一样“看”懂世界,并对所看到的图像或视频进行分析和理解。
当这项技术应用于海洋探索时,其作用和贡献是多方面的。
首先,计算机视觉有助于海洋生物的研究和保护。
在深邃的海洋中,生活着无数种类的生物,有些甚至还未被人类所发现。
通过水下摄像机和传感器,计算机视觉系统可以捕捉到海洋生物的图像和行为。
这不仅让我们能够更直观地了解它们的外观特征、生活习性,还能对它们的数量和分布进行监测。
比如,通过对珊瑚礁生态系统的长期图像监测,科学家可以发现珊瑚的生长状况、疾病爆发以及周围鱼类种群的变化。
对于一些濒危的海洋物种,计算机视觉能够提供精准的追踪和保护策略,防止它们受到过度捕捞或栖息地破坏的威胁。
其次,在海洋地质和地形的勘察方面,计算机视觉发挥着重要作用。
传统的海洋地质勘察方法往往受到诸多限制,如探测范围有限、数据不够精确等。
而借助高分辨率的海底成像设备和计算机视觉算法,我们能够绘制出更加详细和准确的海底地图。
这些地图不仅可以展示海底山脉、峡谷、海沟等地貌特征,还能帮助我们发现潜在的矿产资源和海底地质活动的迹象。
例如,通过对海底火山活动区域的图像分析,地质学家可以预测火山喷发的可能性,为相关的海洋工程和沿海地区的安全防范提供重要依据。
再者,计算机视觉在海洋环境监测方面也有着显著的贡献。
海洋污染、气候变化等问题日益严峻,对海洋环境的实时监测变得至关重要。
利用计算机视觉技术,可以对海洋中的漂浮垃圾、油污泄漏等进行快速检测和识别。
同时,还能监测海水的颜色、透明度等参数,从而推断出海洋的水质状况和生态系统的健康程度。
例如,当出现大面积的赤潮现象时,计算机视觉系统能够及时发现并发出警报,以便相关部门采取措施进行治理,减少对海洋生态和渔业资源的损害。
三维视角体验深海潜水

三维视角体验深海潜水想象一下,你穿上了一套高科技的潜水装备,跳入了一个无边无际的海洋世界。
在这里,你可以感受到海水的流动、触摸到海底的生物,甚至还能与它们进行互动。
这就是三维视角技术带给我们的全新体验——深海潜水。
首先,让我们来了解一下什么是三维视角技术。
简单来说,它就是一种通过模拟人眼视觉系统的方式,将现实世界中的物体和场景转化为数字化信息,然后再将这些信息呈现在用户眼前的技术。
这种技术可以让我们身临其境地感受到虚拟世界中的一切,仿佛置身于其中。
那么,当我们把这项技术应用到深海潜水中时,又会擦出怎样的火花呢?让我们一起来探索一下。
首先,三维视角技术可以让我们对深海环境有更直观的了解。
在过去,我们只能通过文字描述或图片来了解深海世界,但这种方式往往难以让人真正感受到深海的神秘和美丽。
而通过三维视角技术,我们可以身临其境地感受到深海中的生物、地形和水流,从而更加深入地了解这个未知的世界。
其次,三维视角技术还可以提高我们的潜水技能。
在传统的潜水过程中,我们需要花费大量的时间和精力去学习各种潜水技巧,如呼吸控制、浮力调节等。
而在三维视角技术的帮助下,我们可以在一个安全的环境中模拟真实的潜水过程,从而更快地掌握这些技能。
此外,我们还可以通过与虚拟教练的互动来提高自己的潜水水平,让潜水变得更加轻松和愉快。
再者,三维视角技术还可以帮助我们更好地保护海洋生态环境。
在传统的潜水过程中,我们可能会不小心破坏珊瑚礁、惊扰海洋生物等。
而通过三维视角技术,我们可以在一个虚拟的环境中进行潜水训练,从而避免对真实海洋环境造成破坏。
同时,我们还可以利用这项技术来监测海洋生态环境的变化,为保护海洋生态提供有力的支持。
当然,三维视角技术在深海潜水领域的应用还远不止于此。
随着科技的不断发展,我们可以预见到未来会有更多创新的应用出现。
比如,我们可以利用三维视角技术来实现远程潜水探险,让人们在家就能欣赏到世界各地的美丽海域;我们还可以利用这项技术来进行海洋科学研究,为人类探索海洋奥秘提供新的视角和方法。
水下目标探测与识别技术 (2)
❖ (3) 提高图像处理算法的实时性能。水下机器人在自主作业过程 中,需要机器人具有快捷准确的反应能力,实时性是其中一个重 要性能指标,如何提高水下光视觉系统各个环节的处理速度,在 实现水下机器人可靠定位与作业规划中具有重要的意义。
2.2.2 水下光场理论
❖ 水下微光成像系统研究是一项颇具规模的工程,涉及众 多关键技术:如水下辐射衰减特性,水下辐射光谱特性, 水下辐射背向散射,成像光谱匹配,选通技术,三维信 息获得方法与技术,多谱信息融合算法与技术,运动效 应,密封技术等。
❖ 沿光线前进方向的散射最强,而垂直方向最弱;与光前进相反的 方向的散射强度比前进方向附近的散射强度小3~4个量级。
2.2.2.3 光在水下的传播
❖ 在水下这个特殊的环境中,光在水中传输时衰减很大,因为水对 光有着严重的吸收和散射作用。因此人眼在水中不能看得很远。 即使通过人工照明的水下电视摄像机,一般也只能观察到十米远 处的物体。目前扩大水下观察距离的途径主要有以下三种:
水下机器人等水下载体上,用于水中目标侦察、探测、识 别等,可实施探雷、探潜、反潜网探测和潜艇导航避碰等。 ❖ 在民用领域,水下光电探测系统可用于水下工程安装、检 修,水下环境监测、救生打捞、海底地貌勘探、石油勘探 钻井位置测定、生物研究等海洋开发。 ❖ 水下成像技术是集微光夜视技术、水下探测技术、信息、 处理技术等交又融合的一项综合性高新技术,己成为光电 信息领域发展的一个重要方面。
基于激光投射视觉处理的水下测距技术研究
基于激光投射视觉处理的水下测距技术研究蔡文郁;衡靓靓;杨俊毅;李竹【摘要】According to practical requirements of deep sea exploration and sampling equipments ,this paper studies an underwater ranging technology based on image vision processing of laser projectionimage .Three blue-green laser emitters forming an equilateral triangle are used as the light source , and we use camera to acquire the projection image on the bottom plane .In this paper ,the Zhang Zhengyou calibration method is used to estimate camera's parameters.Moreover,two kinds of mathematical models which are named as ideal imaging model and actual imaging model are proposed to calculate the distance between camera plane and the bottom plane of the sea according to the inclination of the ocean floor .Gray-scale image processing , threshold processing and morphology processing are carried on the laser projection image before image ranging .Finally, this paper carried out lab tests on the proposed underwater ranging system ,and the results verify the feasibility of the application of this system in underwater short distance environment .%针对深海探测与取样设备的实际应用需求,研究了一种基于图像视觉处理的水下测距技术与系统。
基于双目视觉的水下海参尺寸自动测量方法
行水下图像增强,结合基于区域对比度的显著性区域检 测方法和直方图均衡的方法,得到海参区域图像的部分 前景和可能的背景。李晓阳等人[18]将深度引入超像素 分割算法,每幅 RGBD 图像变成超像素块的集合,构建 超 像 素 块 的 图 模 型 ,结 合 显 著 性 检 测 来 扩 充 种 子 点 区 域,基于 Biased Normalized Cuts 来实现共分割,借助深 度信息来优化分割结果。
收稿日期:2020-01-19 修回日期:2020-06-04 文章编号:1002-8331(2021)08-0271-08
272 2021,57(8)
Computer Engineering and Applications 计算机工程与应用
牧场选择水下智能机器人代替人工来完成海参捕捞作 业已经成为趋势。
Automatic Measurement of Underwater Sea Cucumber Size Based on Binocular Vision DONG Peng, ZHOU Feng, ZHAO Congcong, WANG Yafei, MI Zetian, FU Xianping
水下视觉技术在海洋探测中的应用研究

水下视觉技术在海洋探测中的应用研究海洋,占据着地球表面的绝大部分,其蕴含的丰富资源和奥秘一直吸引着人类不断探索。
在海洋探测的众多技术手段中,水下视觉技术正发挥着日益重要的作用。
水下视觉技术,简单来说,就是让我们能够在水下“看清”周围环境的一系列技术手段。
它就像是我们在水下的“眼睛”,帮助我们获取各种有价值的信息。
首先,让我们来了解一下水下视觉技术的基本原理。
在水下环境中,光线的传播会受到诸多因素的影响,如水的浑浊度、折射和散射等。
为了克服这些困难,水下视觉技术通常会采用特殊的光源和光学设备。
例如,使用高强度的LED灯来提供足够的照明,以及采用广角镜头和特殊的滤镜来改善图像质量。
在海洋探测中,水下视觉技术的应用十分广泛。
其中一个重要的应用领域是海洋生物研究。
通过水下摄像机和摄影设备,科学家们能够观察到海洋生物的行为、习性和生态特征。
比如,我们可以近距离观察鲸鱼的迁徙路线,了解它们的群体行为;也能够细致地研究珊瑚礁周围各种鱼类的觅食和繁殖方式。
这些观察和研究对于保护海洋生态系统、制定合理的海洋保护政策具有重要意义。
水下考古也是水下视觉技术大显身手的领域之一。
在海底,沉睡着许多古老的沉船和遗址,它们承载着历史的记忆。
借助水下视觉技术,考古学家可以在不破坏遗址的前提下,对这些沉船和遗址进行详细的记录和研究。
高清的图像和视频能够帮助他们识别文物的种类、分布和保存状况,为后续的发掘和保护工作提供重要的依据。
除此之外,水下视觉技术在海洋地质勘探中也发挥着关键作用。
它可以帮助地质学家观察海底的地形地貌、岩石结构和地质构造。
通过对这些信息的分析,我们能够更好地了解地球的地质演化过程,以及预测可能发生的地质灾害,如海底地震和海啸等。
在海洋工程方面,水下视觉技术同样不可或缺。
例如,在建设海底管道、电缆和海洋平台时,工程师们需要实时监测施工过程,确保工程的质量和安全。
水下视觉技术能够提供清晰的图像,让他们及时发现潜在的问题并采取相应的措施。
双目 水面特征
双目水面特征
双目水面特征是指利用双目摄像头对水面进行拍摄,通过分析拍摄到的图像来提取水面的特征。
具体而言,双目水面特征可以包括以下几个方面:
1.水面纹理:通过分析双目图像中水面的纹理,可以提取出水面的特征信息。
例如,水面的波浪、水草、浮游生物等都可以被提取出来,用于水体状态的判断和分析。
2.水面颜色:双目摄像头可以捕捉到水面的颜色变化和分布情况。
通过对双目图像中水面的颜色进行分析,可以提取出水体的颜色特征,例如水体的蓝绿比例等,用于水体污染程度和水质状况的评估。
3.水面波动:利用双目摄像头可以观察水面的波动情况。
通过对双目图像中水面波动的相位、频率和幅度等信息进行提取,可以判断水体的流动状态和水流速度等。
4.水面目标识别:双目水面特征还可以用于水面目标识别。
通过对双目图像中的水面进行特征提取和比对,可以识别出水面上特定目标的位置、形状和运动轨迹等信息,例如船只、浮标、水生动物等。
综上所述,双目水面特征可以提供多方面的水体信息,对于水体监测、环境保护、水下机器人等领域都具有重要的应用价值。
水下机器人的视觉感知技术
水下机器人的视觉感知技术在深邃的海底,水下机器人是探索和研究的重要工具。
在这样的环境中,视觉感知技术就显得尤为重要。
水下机器人的视觉感知技术是指通过感知和识别周围环境,获得目标物体的信息、形状、大小、位置等各种属性,从而能够完成图像处理、目标识别、目标跟踪、路径规划等任务。
在水下机器人的探测、检测、观察和操作中起到至关重要的作用。
一、水下机器人的视觉感知技术分类视觉感知技术主要可以分为两类,分别为主动视觉和被动视觉。
主动视觉是通过主动发射光波,然后通过接收到的光波来感知周围环境。
而被动视觉则是通过感知周围光线的反射来获取信息。
主动视觉主要有以下几种方法:声纳、激光雷达、水下测距仪。
声纳是通过发射超声波向周围环境扫描,然后通过接收回波来得到海底结构等信息。
激光雷达则通过向目标物体发射激光束,然后通过接收到的反射激光来感知目标物体的位置和距离。
水下测距仪则是通过向目标物体发射电磁波,然后通过接收到的反射信号来测量目标物体的距离。
被动视觉主要有以下几种方法:水下相机、水下不透明物体观察器、水下热图仪。
水下相机是通过感知周围的光线,然后将其转换为数字信号,从而得到图像信息。
水下不透明物体观察器则是通过感知物体反射的声音来获取物体的位置、形状和大小等信息。
水下热图仪则是通过感知周围环境的温度,来得到目标物体的位置和距离等信息。
二、水下机器人的视觉感知技术应用水下机器人的视觉感知技术可以应用于多个领域。
下面将介绍几个常见的应用场景。
1、海底能源资源勘探海底能源资源勘探是水下机器人的一项主要任务。
水下机器人通过激光雷达、声纳等主动视觉技术,可以深入海底,感知海洋底部的结构、温度和物质等信息,为海底资源勘探提供了技术手段。
通过被动视觉技术,水下机器人可以精确识别目标物体,进行采样和分析。
2、海底考古研究水下考古研究是为了探究古代文明和历史遗迹等问题。
水下机器人通过水下相机和水下不透明物体观察器等被动视觉技术,可以获取古代建筑物、文物和船只等目标物体的图像信息。
目镜变倍型双筒望远镜在潜水探险中的实际应用
目镜变倍型双筒望远镜在潜水探险中的实际应用潜水探险是一项令人兴奋而又具有挑战性的活动,它既能带给人们对海底世界的好奇和探索的乐趣,同时也需要使用一些专业的装备来确保潜水者的安全和正常进行潜水任务。
目镜变倍型双筒望远镜就是其中一种起到重要作用的装备,在潜水探险中可提供准确的视野和实用的功能。
本文将重点介绍目镜变倍型双筒望远镜在潜水探险中的实际应用。
首先,目镜变倍型双筒望远镜具有优秀的水下视野。
在潜水探险中,潜水者通常需要观察海洋生物、珊瑚礁、岩石等,以及识别和寻找潜水器材或其他潜水队员。
而目镜变倍型双筒望远镜可以提供放大的视野范围,使潜水者能够清晰地看到细节,并且有助于确定目标的位置。
而且,由于水下环境中的水流等因素会导致视野模糊,目镜变倍型设计可以通过调整放大倍数来提高视野的清晰度,使潜水者更好地观察和辨识目标。
其次,目镜变倍型双筒望远镜具有防水和防雾功能。
由于潜水任务通常发生在水下环境中,装备必须能够有效地防止水分进入望远镜内部,否则将影响视野的清晰度甚至损坏望远镜。
对于目镜变倍型双筒望远镜来说,它们通常采用密封设计和特殊处理的镜片,使得望远镜具有防水和防雾的能力。
这保证了潜水者在潜水任务期间可以持续使用望远镜,并且清晰地观察目标。
此外,目镜变倍型双筒望远镜还具备质量稳定和耐用的特点。
潜水任务的特殊环境对装备的质量和耐久性提出了更高的要求。
目镜变倍型双筒望远镜通常采用高品质的材料制造,具有良好的抗冲击、耐磨和耐腐蚀性能。
这使得它们能够在潜水探险中经受住各种压力和环境的考验,保证潜水者能够长时间地使用,并且不会因为损坏而影响观察任务的进行。
最后,目镜变倍型双筒望远镜具备人性化的设计和操作。
在潜水任务中,潜水者需要将大部分注意力集中在任务本身上,因此望远镜的设计和操作应该尽量简单方便,并且能够适应潜水者穿戴装备的特殊环境。
目镜变倍型双筒望远镜通常具有防滑把手、易调焦距等人性化设计,使潜水者可以在水下轻松地调整和操作望远镜,从而更好地完成任务。
水下机器视觉技术的研究与应用现状
水下机器视觉技术的研究与应用现状水下机器视觉技术是一门涉及水下影像处理、图像识别和目标检测的研究领域。
随着现代科技的进步,水下机器视觉技术已经在水下文化遗产保护、水下探测、海洋资源开发和水下机器人等领域得到广泛应用。
本文将探讨水下机器视觉技术的研究进展和应用现状。
首先,水下机器视觉技术的研究中面临着许多挑战。
由于水下环境的特殊性,水的折射和散射、光线衰减、沉浮物和生物等因素使得水下图像的质量较差。
另外,水下目标通常具有复杂的外观和形状,加上光线不均匀形成的阴影,导致图像中的目标难以准确识别。
此外,由于水下环境的湍流和波浪等因素,水下图像也会受到运动模糊和失真的影响,使得图像处理更加困难。
为了克服这些挑战,研究人员借鉴了计算机视觉领域的一些算法,并对其进行了改进和优化。
目前,常用的水下图像增强技术包括颜色校正、对比度增强、去噪和图像复原等方法。
通过这些技术,可以提高水下图像的质量和清晰度,进而提高目标的检测和识别率。
水下机器视觉技术的应用涉及多个领域。
在水下文化遗产保护方面,水下机器视觉技术可以帮助考古学家和文物保护人员探索水下古城、沉船等文化遗产,通过对水下图像的处理和分析,实现对文物的保护和修复。
水下机器视觉技术还可以应用于海洋生物学研究,帮助科学家观察和记录海洋生物的行为和生态环境,为海洋保护和生物多样性保护提供重要数据。
此外,水下机器视觉技术也在水下探测和海洋资源开发中发挥着重要作用。
例如,水下机器视觉技术可以应用于海洋勘探和石油开发,通过分析水下图像,确定潜在的油气资源和海底地质结构。
水下机器人的发展也推动了水下机器视觉技术的应用。
水下机器人配备了相机和传感器,可以在水下环境中执行各种任务,如水下修复、海底管道巡检和海底地质调查等。
通过水下机器视觉技术的支持,水下机器人可以更加准确地识别和定位目标。
总结来说,水下机器视觉技术的研究和应用取得了显著进展,为水下环境中的目标检测和识别提供了有力的工具和方法。
水中结构物表面缺陷摄像检测与识别技术
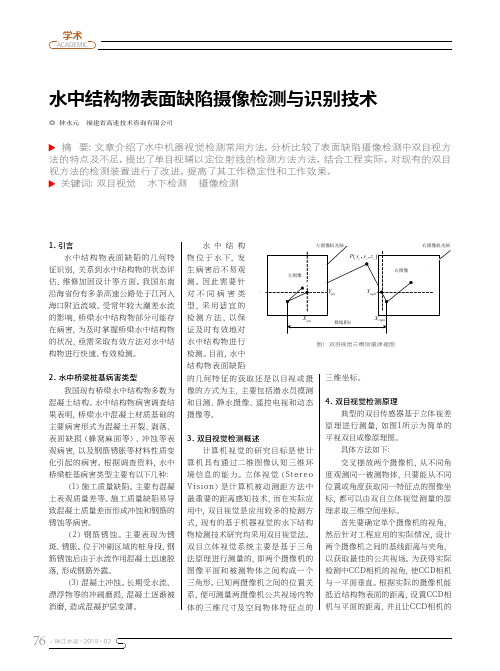
摘 要:文章介绍了水中机器视觉检测常用方法,分析比较了表面缺陷摄像检测中双目视方法的特点及不足,提出了单目视辅以定位射线的检测方法方法,结合工程实际,对现有的双目视方法的检测装置进行了改进,提高了其工作稳定性和工作效果。
关键词:双目视觉 水下检测 摄像检测1.引言水中结构物表面缺陷的几何特征识别,关系到水中结构物的状态评估、维修加固设计等方面。
我国东南沿海省份有多条高速公路处于江河入海口附近流域。
受常年较大潮差水流的影响,桥梁水中结构物部分可能存在病害,为及时掌握桥梁水中结构物的状况,亟需采取有效方法对水中结构物进行快速、有效检测。
2.水中桥梁桩基病害类型我国现有桥梁水中结构物多数为混凝土结构。
水中结构物病害调查结果表明,桥梁水中混凝土材质基础的主要病害形式为混凝土开裂、剥落、表面缺损(蜂窝麻面等)、冲蚀等表观病害,以及钢筋锈胀等材料性质变化引起的病害。
根据调查资料,水中桥梁桩基病害类型主要有以下几种:(1)施工质量缺陷。
主要有混凝土表观质量差等。
施工质量缺陷易导致混凝土质量差而形成冲蚀和钢筋的锈蚀等病害。
(2)钢筋锈蚀。
主要表现为锈斑、锈胀。
位于冲刷区域的桩身段,钢筋锈蚀后由于水流作用混凝土迅速脱落,形成钢筋外露。
(3)混凝土冲蚀。
长期受水流、漂浮物等的冲刷磨损,混凝土逐渐被消磨,造成混凝护层变薄。
水中结构物位于水下,发生病害后不易观测。
因此需要针对不同病害类型,采用适宜的检测方法,以保证及时有效地对水中结构物进行检测。
目前,水中结构物表面缺陷的几何特征的获取还是以目视或摄像的方式为主,主要包括潜水员摸测和目测、静水摄像、遥控电视和动态摄像等。
3.双目视觉检测概述计算机视觉的研究目标是使计算机具有通过二维图像认知三维环境信息的能力。
立体视觉(S te r e o Vision)是计算机被动测距方法中最重要的距离感知技术,而在实际应用中,双目视觉是应用较多的检测方式,现有的基于机器视觉的水下结构物检测技术研究均采用双目视觉法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双目立体视觉的水下应用
从图像预处理、相机标定、立体匹配三个方面论述了双目视觉在水下场景的应用,比较了与空气环境中应用的不同,对水下双目视觉发展趋势做了分析。
标签:水下双目视觉;相机标定;立体匹配
Abstract:This paper discusses the application of binocular vision in underwater scene from three aspects of image preprocessing,camera calibration and stereo matching,compares the application of binocular vision with that in air environment,and analyzes the development trend of underwater binocular vision.
Keywords:underwater binocular vision;camera calibration;stereo matching
引言
双目立体视觉技术利用视差理论恢复像素的深度信息和三维坐标,通过获取左右两个视角下同时采集的两幅图像恢复三维场景信息,还原真实的三维世界,为导航提供目标的位置信息描述,是被动式视觉测量技术的一种。
作为计算机视觉的一个重要分支,双目立体视觉技术模型简洁,运算高效,有着广阔的应用前景。
而随着海洋科学技术的发展和人类对海洋资源探索的逐渐深入,双目视觉技术逐渐被应用到海洋探测,在对水下目标的监控、海底地形测绘、海流测量、水下军事设施的探测和侦查等方面都有着广泛的应用。
双目立体视觉系统模拟人眼,通过三角测量原理来获取图像的视差,进而得到目标三维信息,一般由以下几个功能模块组成:图像采集,相机标定,立体匹配,三维重建。
常规的双目视觉大多是在单一介质的空气中,而由于水下环境的特殊性,往往存在光的散射,吸收效应等不利因素的干扰,相关技术方法也应随环境作适应性调整。
本文从图像处理,相机标定,立体匹配这三个方面在水下场景的应用做了论述,阐明了与单一空气介质环境中的不同,并对水下双目立体视觉技术的发展做了展望。
1 成像模型
双目立体视觉用到的模型一般是线性的针孔模型,该模型是双目立体视觉中成像的基本模型,将相机理想化,并把空间点投影视为中心,投影未考虑镜头畸变和环境等其他因素,所以也叫线性摄像机模型。
而水下成像模型则是考虑到折射的影响,对此做相应补偿和修正。
在双目立体视觉系统中,为了研究空间点和像点的投影关系,通常会用到4个坐标系:世界坐标系OW-XWYWXW、相机坐标系O-xyz、图像物理坐标系O-XY和图像像素坐标系Of-uv。
M1为相机内参,由ax、ay、uo、vo四个与相机内部参数相关的变量决定;M2为相机外参,由旋转矩阵R和平移矩阵T决定。
2 图像预处理
不同于常规图像,由于水下存在光的折射、散射、吸收效应,以及存在各种悬浮物,水下图像通常噪声大、照度低,颜色失真,不符合双目立体视觉系统所需图像的质量要求。
在进行标定和匹配前,要对水下图像做预处理,减少这些不利影响,使之成为清晰的图像。
水下图像预处理通常有两个方面:图像增强和图像复原。
2.1 图像增强
图像增强技术主要包括空域增强和频域增强。
空域增强以图像灰度为基础,直接对图像像素进行处理,包括直方图均衡化,平滑滤波等;频域增强是在频域处理图像的不同频率分量,借助滤波器,清除不需要的频率,获得增强效果。
例如平滑滤波能消除高频分量,有效抑制高斯噪声和椒盐噪声,其在时域的表达式为:
2.2 图像复原
图像复原的关键是要有图像退化大的先验知识,在确定水下图像的降质原因后,建立“降质模型”通过逆滤波还原图像。
一般降质原因有两种:一是水体的吸收与散射等光线传播过程的影响;二是水体本身的背景噪声等影响。
3 相机标定
双目立体视觉是通过摄像机模型来进行测量的,而标定就是要获取模型的基本参数,其中摄像机自身参数称为内参数,包括摄像机焦距、主点坐标、畸变系数等,摄像机坐标系与世界坐标系间的转换关系称为外参数,包括旋转矩阵和平移矩阵。
在水下成像过程中,由于成像介质的多样性,成像光线会发生折射,基本标定方法不能完整的标定出所需参数,为有效的处理水下成像时的折射问题,准确还原水下成像过程,在水下成像物理模型的基础上,提出了各种标定方法,如基于粒子群优化的水下折射标定法。
4 立体匹配
其本質就是在左右图像中寻找同一目标对应的不同像素点,匹配之后获得视差图,再进行三维重建。
由于水下环境特殊,诸如极线约束等许多算法的基本条件在水下不成立,且水下成像存在散射,噪声等一系列严重影响图像质量的效应,导致现有许多性能良好且成熟的算法无法应用到水下。
目前主要有两种思路解决水下立体匹配存在的问题:一是采用折射模型,直接求解;二是寻求水下图像与一般空气图像一一对应的比例关系,将水下图像间接转换为空气中图像求解。
图2就是常用的水面折射模型,假设两摄像机的光心为Oc、O’c,基线距离为a,
摄像机焦距为f,折射面与目标所在平面距离为d,在空气和水中的折射率分别为n1、n2,n=n2/n1。
以左摄像机光心为原点建立坐标系。
5 结束语
双目视觉目标定位是近年来较热门的一个课题,对于水下近距离,高精度的测量,双目视觉定位技术可以发挥声纳探测所不具备的优势。
本文论述了双目立体视觉应用在水下的若干关键技术。
得出:相对于空气中的视觉定位,水下双目视觉需要克服环境上的不利因素,对模型和算法提出了更高要求,对于水下环境光较弱,衰减迅速问题的解决和对成像模型以及算法的优化是水下双目视觉定位研究的发展方向。
参考文献:
[1]曹之乐,等.双目立体视觉匹配技术综述[J].重庆理工大学学报(自然科学),2015,29(2):70-75.
[2]张广军.机器视觉研究与发展[M].科学出版社,2012.
[3]马莉.基于双目视觉三维重建技术研究[D].太原:中北大学,2012:22-30.。