labview运动控制DEMO labview运动控制历程,labview调用
基于LabVIEW的多轴运动控制系统半实物仿真平台设计

基于LabVIEW的多轴运动控制系统半实物仿真平台设计基于LabVIEW的多轴运动控制系统半实物仿真平台设计摘要:随着工业自动化的不断发展,多轴运动控制系统在工业生产中的应用日益广泛。
为了提高系统的性能并减少实际试验中的风险与成本,本文设计了基于LabVIEW的多轴运动控制系统半实物仿真平台。
该平台通过软件仿真实现多轴运动控制的动态展示,使用户能够更直观地了解系统的工作原理以及调试参数。
本文首先介绍了多轴运动控制系统的基本原理和结构,然后详细阐述了平台的设计思路和实现过程,并通过实例验证了平台的可行性和有效性。
最后,对平台的不足之处进行了总结,并对未来的工作进行了展望。
关键词:多轴运动控制系统;半实物仿真平台;LabVIEW;动态展示;仿真实例1.引言多轴运动控制系统是一种广泛应用于机械加工、自动化生产等领域的高精度控制系统。
它通过控制驱动器和伺服电机来实现工作物体在多个轴向上的运动控制,可以实现较高的定位精度和运动速度,并且具有反馈控制的能力。
然而,为了确保系统的安全性和可靠性,在实际开发和试验中需要耗费大量的时间和资源。
因此,设计一种能够在实际试验之前对系统进行全面验证和调试的仿真平台具有重要的意义。
2.多轴运动控制系统的基本原理和结构多轴运动控制系统由伺服电机、传感器、运动控制器以及上位机等组成。
其中,伺服电机通过驱动器转换电能为机械能,可以控制物体的位置和速度。
传感器用于实时反馈物体的状态信息,如位置、速度和加速度等。
运动控制器是系统的核心部件,负责接收传感器的反馈信号,并通过控制算法生成合适的输出信号控制伺服电机。
上位机是用户与系统交互的界面,通过上位机可以输入运动参数和控制指令,实现运动轨迹的规划和控制。
3.基于LabVIEW的多轴运动控制系统半实物仿真平台设计为了满足对多轴运动控制系统进行全面仿真和调试的需求,本文设计了一种基于LabVIEW的半实物仿真平台。
该平台实现了具有动态展示功能的多轴运动控制系统的仿真,使用户能够更加直观地了解系统的工作原理和调试参数。
使用LabVIEW进行电机控制实现电机的速度和位置控制
使用LabVIEW进行电机控制实现电机的速度和位置控制LabVIEW是一种功能强大的图形化编程环境,被广泛应用于各种工程领域中,包括电机控制。
本文将介绍如何使用LabVIEW进行电机控制,实现对电机的速度和位置控制。
一、LabVIEW概述LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国国家仪器(National Instruments)公司开发的一款图形化编程环境。
其特点是可视化、易学易用,拥有许多强大的图形化编程工具和函数库,可以帮助工程师和科学家快速进行系统设计、数据采集、信号处理等工作。
二、LabVIEW中的电机控制1.速度控制要实现电机的速度控制,首先需要连接一个编码器或旋转传感器来获取电机的转速信息。
在LabVIEW中,可以使用DAQmx函数库中的函数来获取传感器的信号,并通过PID控制算法实现精准的速度控制。
在LabVIEW中创建一个新的VI(Virtual Instrument),然后从函数面板中选择相应的DAQmx函数,如"DAQmx Create Channel"来创建用于接收编码器信号的虚拟通道。
接着,可以使用"DAQmx Read"函数获取传感器的转速信号。
最后,通过编写PID控制算法,使用"PID.vi"函数来实现电机的速度控制。
2.位置控制要实现电机的位置控制,需要连接一个位置传感器,如光电编码器或磁编码器,并通过反馈控制算法实时检测电机的位置,并根据设定值进行控制。
在LabVIEW中,可以使用Encoder和PID函数库来实现电机的位置控制。
在LabVIEW中创建一个新的VI,然后在函数面板中选择Encoder 函数库中的函数,如"Initialize Encoders"来初始化编码器。
接着,使用"Read Encoder"函数实时读取电机的位置信息,并通过PID控制算法计算出控制信号。
基于labview的运动控制系统的软件设计

第一章绪论1.1课题来源以及研究的背景、目的和意义1.1.1课题来源本课题来源于某自动测试系统研究项目中的一部分,研究的硬件平台是一个四轴的运动执行机构,主要工作是设计出上位机软件和运动轨迹规划,要求软件具有易操作性、简单高效性、兼容性,实现运动执行机构的两个动子在X、Y两个方向上的协调运动快速精确的移动到指定的位置,误差范围控制在±3um内。
1.1.2课题研究的背景、目的和意义随着科技的飞速进步和社会的快速发展,于20世纪末,运动控制开始快速发展,并成为了自动化技术的一个关键的分支。
现代文明社会以及和谐社会的标志之一便是生活质量及水平,运动控制技术的发展也同时推动并代表了生活质量及水平。
在现代工业中,运动控制涉及了极其广泛的领域,并迅速地向前推进着,已经涵盖了汽车、纺织机械、冶金机械、家用电器、工业机器人等领域[1]。
虽然运动控制发展的时间并不算悠久,但是运动控制技术的提高也随着制造业对于产品加工的要求的提高在不断地水涨船高。
这也就导致了运动控制技术非常迅速的发展开来,尤其在高科技技术的方面为其提供了极为广阔的发展空间及市场。
现如今,运动控制技术及系统的普及和应用在自我进步的途中,影响了更多的产业,并与微电子技术、传感器技术等技术的发展和科技的进步相辅相成。
与此同时,运动控制在工业化技术中,承担起了重大的任务,因此,对于此技术进行分析,不但能够更深一层次的了解它的理论,还可以更好的在实际生活当中运用。
总而言之,运动控制技术的发展与其相关的技术的发展是共同进退的,其发展空间是巨大的,其将会创造的价值是不可估量的。
运动控制技术正逐渐成为一门具有显著特点,广泛应用于工业、军事及商业等领域,能够产生巨大经济效益的高新技术。
1.2运动控制系统的发展和研究现状人类对运动的控制可以追溯到我国古代用来指示方向的指南针,为中国的马均于公元235年研制的用齿轮传动、能自动指示方向的指南车模型。
指南车作为人类历史上第一架有稳定的机械结构,巧妙地运用了负反馈原理,非常类似于现在的恒值控制系统。
利用LabVIEW软件进行控制设计和仿真入门
利用LabVIEW软件进行控制设计和仿真入门这个章节将集中介绍LabVIEW软件中的控制系统设计的基本特性。
我们在这里假定读者们已经熟悉了LabVIEW软件的其它部分。
(如果你对LabVIEW软件的其它部分不熟悉,请参考Robert H. Bishop的‘Learning with LabVIEW’)。
每一章的专用信息会包含在那一章的简介中在我们开始之前,请确保你的计算机上已经安装了可使用的控制设计和仿真工具包。
它们不是LabVIEW 基本软件的一部分,而是需要单独购买的。
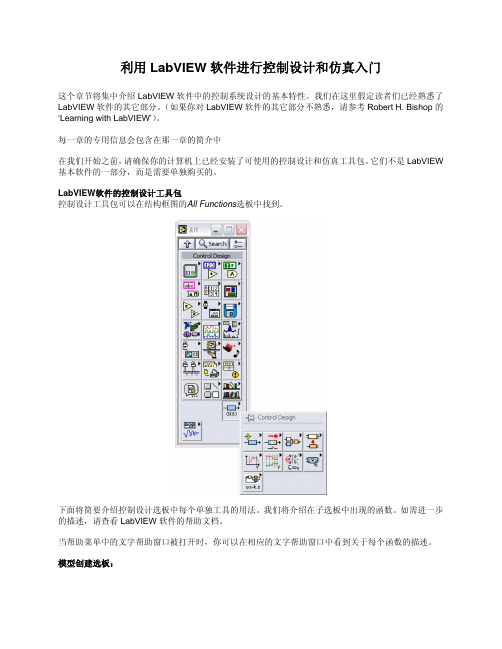
LabVIEW软件的控制设计工具包控制设计工具包可以在结构框图的All Functions选板中找到。
下面将简要介绍控制设计选板中每个单独工具的用法。
我们将介绍在子选板中出现的函数。
如需进一步的描述,请查看LabVIEW软件的帮助文档。
当帮助菜单中的文字帮助窗口被打开时,你可以在相应的文字帮助窗口中看到关于每个函数的描述。
模型创建选板:这节中的函数用于创建各种类型的模型,例如状态空间模型、传递函数模型和零点/极点/增益模型等。
下面将讨论创建状态空间模型和创建传递函数模型函数。
控制设计工具包中的创建状态空间模型函数的端子如上图所示。
如果采样间隔端子没有连接,那么系统被默认为是连续采样。
将一个值连到采样间隔端子上会使系统变为离散系统,它使用给定的时间作为采样间隔。
状态空间模型的A、B、C、D 矩阵都有对应的端子。
一旦LabVIEW软件创建了状态空间模型(其输出端子可用),该模型就可以用于其它函数并且可以转化成其它的形式,在这一节里我们将进行更加深入的讨论。
下面就是创建状态空间模型的一个例子。
它的输出端可以连接到控制设计工具包中很多其它函数上,作为它们的输入端。
输入端子既可以是常数(在结构框图中),也可以是控制量(在前面板中)。
为了使这个手册更容易理解,我们演示的大多数例子都是在结构图中使用常数,但是,使用前面板上的控制量时常会使效率更高。
labview与松下A6伺服 高精度闭环运动控制 Modbus通讯

7 -3、使用松下伺服支援软件编写block motion动作
4. Block Motion 编辑
7 -4、使用松下伺服支援软件编写block motion动作
5. 将参数传送到伺服驱动器EEP中
8、总结
到此松下伺服的全部内容就讲完了,希望 对大家有所帮助。
这里在提醒几句,请大家所使用串口调试 软件对报文进行监视,这样有助于发现问题, 另外要多花时间研究手册。
1. 使用普通usb mini线连接A6和PC 2. 在PC松下伺服支援软件 PANATERM ver.6.0
注意:支援软件 的详细操作参照 PANATERMforA6.PDF 文档
4-2.确定通讯规格
4-3.伺服参数设置
注意参数要保存在驱动器rom中, 保存后重启驱动器
4-4.伺服参数设置
5 -1.通讯报文详解
1、在所需线缆正常连接后我们尝试用串口调试助手发一组报文,首先要确保 A6通讯参数以及串口调试助手的参数一致且正确,这样我们才可以收到A6返 回的报文。 01 01 00 A4 00 01 BC 29
5 -2.通讯报文详解
对照modbus数据结构,我们看下数据结构 如右图,可以看出数据报文符合modbus。
大家阅读《 MINAS A6系列 技术资料 -Modbus通信规格篇》,对block motion 有所准备。
7 -2、使用松下伺服支援软件编写block motion动作
1. 打开 Block Motion 编辑器 2. 打开Block Motion参数编辑标签页 3. 设置Block Motion参数
注意:发送报文的最后两个byte是CRC校验码,它通过CRC计算器得到。 这里以使能srv-on为例,来计算校验码,注意数值颠倒。
labview完整教程详细解答
第一讲:认识Labview1.1 Labview 简介在开始菜单里找见NI Labview7.1 点击打开,会出现如下界面:从File>>New VI 或者从右半部分中的New>>Blank VI 都可以打开如下界面:上图中前图是虚拟仪器的前面板,是用户使用的人机界面,后面的是程序框图界面(即后面板)。
在LabVIEW的用户界面上,应特别注意它提供的操作模板,包括工具(Tools)模板、控制(Controls)模板和函数(Functions)模板。
这些模板集中反映了该软件的功能与特征。
下面我们来大致浏览一下。
工具模板(Tools Palette)如果该模板没有出现,则可以在Windows菜单下选择Show ToolsPalette命令以显示该模板。
当从模板内选择了任一种工具后,鼠标箭头就会变成该工具相应的形状。
当从Windows菜单下选择了Show Help Window功能后,把工具模板内选定的任一种工具光标放在流程图程序的子程序(Sub VI)或图标上,就会显示相应的帮助信息。
下面的两个模板是多层的,其中每一个子模板下还包括多个对象。
控制模板(Control Palette)Array注意:只有打开前面板时才能调用该模板该模板用来给前面板设置各种所需的输出显示对象和输入控制对象。
每个图标代表一类子模板。
如果控制模板不显示,可以用Windows菜单的Show ControlsPalette功能打开它,也可以在前面板的空白处,点击鼠标右键,以弹出控制模板。
控制模板如右图所示,它包括如下所示的一些子模板。
子模板中包括的对象,我们在功能中用文字简要介绍。
101112131415功能模板(Functions Palette)现功能模板。
功能模板是创建流程图程序的工具。
该模板上的每一个顶层图标都表示一个子模板。
若功能模板不出现,则可以用Windows菜单下的Show Functions Palette功能打开它,也可以在流程图程序窗口的空白处点击鼠标右键以弹出功能模板。
NI运动控制助手教程

NI MotionAssistant 和LabVIEW 入门本教程旨在帮助您快速创建强大运动控制应用NI 运动助手和LabVIEW。
NI 运动助手是LabVIEW 加载项提供了图形,点和单击界面与3D 可视化功能控制步进、伺服等电机。
这些三个练习将您熟悉NI 运动助手环境和教你如何创建您自己的运动助手脚本并将其转换为LabVIEW 程序。
在完成本教程,您将能够创建运动控制应用程序与直线和弧移动与集成的数据采集和图像采集。
本教程介绍了才刚开始。
一旦你已经完成,请感觉自由地探索环境——运动助手有众多的功能提供,包括与智能轮廓轮廓的移动,教模式、角拐轴和更多。
你可以了解更多有关运动助手在/motion样机半导体硅片加热应用程序使用运动助理和LabVIEW此应用程序的目的是以半导体晶圆片线性在舞台上移动入炉,并保持不指明烧伤在期间内。
在那之后晶圆片是迁离炉,取而代之的是另一个。
该系统由有长期的旅行长度线性阶段组成。
您可以通过NI 运动助手使用下面的步骤中创建一个脚本的原型此应用程序的运动部分:Step 1.引用移动——将移至其初始的起始位置,通过使用查找首页的线性阶段移动类型。
·Step 2。
直线移动——移动线性舞台上放入炉内的晶片。
·Step 3。
测量——等待指定的烧伤中的时间量。
Step 4。
直线移动——将晶圆片移回其原始位置。
·Step 5。
将转换为LabVIEW 或C 代码第1 步。
引用移动——将移至其初始的起始位置,通过使用查找首页的线性阶段移动类型。
插入一个引用移动的步骤,以将线性阶段移动到其初始的起始位置。
1.单击最左侧的应用程序窗口中的添加步骤按钮。
2.单击引用移动按钮。
3.单击对话框底部的新屏幕上的配置选项卡。
·此应用程序使用的议案只有一个轴,请单击1 (D) 按钮。
·:选择运动控制器。
·:选择计数(步骤)。
·:选择默认的轴1。
LabVIEW与控制系统设计实现系统控制和调节

LabVIEW与控制系统设计实现系统控制和调节LabVIEW (Laboratory Virtual Instrument Engineering Workbench) 是国家仪器标准委员会推荐的一种基于图形化编程语言的开发环境,广泛应用于各个领域的工程与科学研究中。
LabVIEW提供了直观、易于使用的图形化编程界面,使得控制系统的设计和实现更加高效和灵活。
本文将介绍LabVIEW在控制系统设计和实现中的应用,并探讨其对系统控制和调节的作用。
一、LabVIEW在控制系统设计中的应用1. 系统建模与仿真在控制系统设计阶段,首先需要对被控对象进行建模与仿真。
LabVIEW提供了丰富的数据采集和信号处理的工具,能够方便地获取实验数据,并通过图形化界面进行数据处理与分析。
基于这些功能,控制系统的建模与仿真可以在LabVIEW平台上进行,方便快捷。
2. 系统控制算法的设计与优化控制系统的性能主要取决于其中的控制算法。
LabVIEW提供了一系列的算法库和模块,涵盖了常见的控制算法,如PID控制、模糊控制、自适应控制等。
同时,LabVIEW还支持用户自定义算法的开发,方便针对不同的系统进行优化与调试。
3. 系统参数的自动调整与优化控制系统的参数调整对于系统的性能和稳定性至关重要。
LabVIEW 提供了参数自整定工具,可以实时监测和调整系统参数,降低调试的复杂性。
通过LabVIEW的优化算法,系统参数的自动调整可以更加快速和准确。
二、LabVIEW在系统控制与调节中的作用1. 实时控制与数据采集LabVIEW提供了强大的实时控制功能,能够对系统进行实时监控和控制。
通过与硬件的连接,LabVIEW可以获取实时数据,实现对系统参数的实时调整,并对系统运行状况进行实时监测。
这为系统的控制和调节提供了良好的基础。
2. 界面友好的人机交互LabVIEW的图形化界面使得系统的控制与调节更加直观和直观。
用户可以通过图形化的操作界面,实现对系统的控制参数的设置和调整,并即时查看系统响应及其相应的数据变化。
LabVIEW在运动控制系统实验平台的应用和实现_苏仔见

中图分类号: TP 273
文献标志码: A
文章编号: 1006 - 7167( 2011) 10 - 0038 - 02
Realization of Motion Control System Experimental Platform Based on LabVIEW
SU Zi-jian, NI Pan, XU Shao-lun ( School of Electronic Information and Electrical Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
图 1 运动控制系统框图
1 传统运动控制系统平台
原有的运动控制系统平台的硬件组成包括触摸 屏、PLC、伺服驱 动 器、伺 服 电 机。 实 验 平 台 主 要 基 于 PLC,通过 CANopen 实现伺服电机的控制。HMI 实现 是基于施奈德的 XBT GT2330 来实现,通信方式同样 采用 Modbus 控制总线实现与 Twido PLC 的通信。系 统框图如图 2 所示。PLC 采用施奈德公司生产的一体 型 TWDLCAE40DRF。通信端口 为 EIA RS-485,最 大 波特率 为 19. 2kb / s,支 持 Modbus RTU 主 / 从 通 信 和 Modbus ASCII 通信[6]。伺服驱动器采用施奈德的交 流伺 服 驱 动 装 置 LXM05A,LXM05A 的 通 信 端 口 为 RJ45 接口,协议采用 Modbus 现场总线与上位机进行 通信[7]。由上级 PLC 控制系统来设定、监控给定值, 下级采用 Schneider Electric 伺服电机。
与探索,2008,27( 9) : 136-137. [12] 冯其红,赵修太,孙仁远. 加强示范中心内涵建设 全面提高实验
基于LabVIEW的运动控制系统的软件设计
基于LabVIEW的运动控制系统的软件设计一、本文概述随着工业自动化的快速发展,运动控制技术在各个领域中扮演着越来越重要的角色。
作为实现精确、高效运动控制的关键环节,运动控制系统的软件设计显得尤为重要。
本文旨在探讨基于LabVIEW的运动控制系统的软件设计方法,以期为相关领域的工程技术人员提供有益的参考和借鉴。
本文将首先介绍LabVIEW软件平台及其在运动控制系统中的应用优势,包括其图形化编程环境、丰富的库函数和强大的数据处理能力等。
随后,文章将详细阐述基于LabVIEW的运动控制系统软件设计的整体架构和关键模块,包括运动控制算法的实现、硬件接口的集成、数据采集与处理等。
本文还将探讨软件设计过程中的优化策略,以提高系统的实时性、稳定性和可靠性。
二、基础知识LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国National Instruments(NI)公司开发的一种图形化编程环境,广泛应用于数据采集、仪器控制、自动化测试等领域。
LabVIEW的强大之处在于其提供了丰富的虚拟仪器(VI)和图形化编程语言G,使得工程师和科学家能够通过直观的图形化编程来实现复杂的数据和信号处理任务。
运动控制系统是指利用计算机技术和自动控制理论,对机械运动部件的位置、速度、加速度等参数进行精确控制的系统。
在LabVIEW 中,通过集成的运动控制模块和驱动器,可以实现对步进电机、伺服电机等执行机构的精确控制。
理解运动控制的基本原理,如PID控制、前馈控制、反馈控制等,对于设计高效的运动控制系统至关重要。
数据采集是运动控制系统中的关键环节,它涉及到从传感器获取数据并将其转换为计算机可以处理的数字信号。
LabVIEW提供了强大的数据采集功能,用户可以通过各种硬件接口(如DAQ卡、USB、以太网等)连接传感器,并利用LabVIEW内置的函数和控件进行数据的采集、分析和处理。
基于LabVIEW的二轴转台控制系统

基于LabVIEW的二轴转台控制系统魏光宇;徐熙平;徐晓丹;汤思佳【摘要】介绍基于LabVIEW的二轴转台控制系统,该系统在LabVIEW图形化编程语言的开发环境下进行控制软件编程和建立人机交互界面,采用研华公司生产的PCI-1723控制卡,实现复杂的运动控制功能,简述了运动系统的控制原理.利用电流环、速度环和位置环三环的闭环控制,实现转台的高精度运动控制.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2010(033)002【总页数】4页(P64-67)【关键词】二轴转台;力矩电机;运动控制【作者】魏光宇;徐熙平;徐晓丹;汤思佳【作者单位】长春理工大学光电工程学院,长春,130022;长春理工大学光电工程学院,长春,130022;长春理工大学光电工程学院,长春,130022;长春理工大学光电工程学院,长春,130022【正文语种】中文【中图分类】TM341转台作为一种高精密设备,广泛应用于运动仿真、雷达、数控机床、航空拍摄等领域。
太阳敏感器是卫星姿态控制系统中的一个重要关键部件,其基本功能是获取太阳矢量在与太阳敏感器相固联的星体坐标系中的方位信息,主要用于空间飞行器的姿态测量、姿态确定和姿态控制。
研究转台在航空航天工业和国防建设中具有重要意义,转台品质的优劣直接关系到太阳敏感器地面试验的可靠性和置信度。
本论文在对力矩电机控制系统进行分析的基础上,通过对控制策略的理论和实验研究,分别设计了俯仰运动和方位运动的控制系统,实现了转台二自由度随动控制。
转台运动采用计算机集中控制方式,选择 PCI-1723板卡作为控制量输出卡,14位的D/A转换提高了转台运行的平稳性。
在图形化编程语言LabVIEW开发环境下,根据设计的控制算法编制了控制程序,实现了转台二自由度运动。
1 二轴转台所研究的转台控制系统主要由上位机软件和运动控制系统两个部分组成:上位机系统软件其中包括串口通讯,PCI-1723板卡驱动和位置闭环控制程序;图1 电流、速度和位置闭环系统Fig.1 Current and speed and position loop system运动控制系统包括伺服电机、伺服控制器、角度检测单元,速度检测单元它们组成一个电流和速度两闭环控制系统,伺服控制器通过内部模拟电路实现电流环和速度环的闭环控制,控制原理如图1所示。
【设计】基于labview和固高运动控制卡的PID半闭环位置控制
丽水学院【关键字】设计毕业设计(论文)(2017届)基于运动控制卡的位置闭环PID控制题目系统设计院别工学院指导教师张文辉职称副教授班级机自132班姓名王宽学号2017年4月28日基于运动控制卡的位置闭环PID控制系统设计专业:机械设计制造及其自动化班级:机自132 姓名:王宽指导老师:张文辉摘要随着机电一体化技术的不断发展,制造业对自动化设备的位置精度要求越来越高。
由于机械传动误差、干扰等问题的存在,保守的开环控制在很多场合已经很难满足生产生活的精度要求,因此开发高精度的闭环运动控制器具有非常重要的实用价值和运用前景。
运动控制卡作为上位机的计算机技术日益成熟,功能强大,性能稳定,而且可靠性越来越高。
Labview作为上位机开发程序,编程方便、简洁,而且适用于调用运动控制卡的动态链接库文件去实现编程的可行性。
因此本文全面了解运动控制卡的程序调用方法及其用Labview作为开发语言的用法,使用步进电机驱动系统结合PID算法,实现步进半闭环位置控制的程序编写,并取得了一定效果。
关键词运动控制卡动态链接库Labview 位置PID控制Closed-loop PID control position system design based on motion control cardProfession: Mechanical engineering and automation Class: Machine from 132 Name: Wang Kuan Instructor:Zhang WenhuiAbstract With the development of electromechanical integration technology, the manufactu ring industry is demanding higher and higher precision of automation equipment. Due to m echanical transmission error, interference problems such as the existence of the traditional o pen loop control on many occasions is hard to meet the requirements of the precision of t he production and living, so development high precision closed loop motion controller has very important practical value and application prospect.The computer technology of the motor control card is becoming more and more matur e, the function is strong, the performance is stable, and the reliability is higher and higher. Labview is a programming convenience, simplicity, and application to the dynamic link li brary file that calls the movement control card to implement the feasibility of programmin g. So in this paper, a comprehensive understanding of the movement control card’s program calls the use of the method and its use Lanview as development language, the use of s tepping motor driven system combined with PID algorithm, implementation step and a halfclosed loop position control programming, and obtained the certain effect. Keywords The motion control Dynamic Link Library Labview PID control目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题背景及意义 (1)1.2 控制系统概述 (1)1.3研究内容 (2)第2章步进电机闭环系统设计 (3)2.1 引言 (3)2.2 电机与驱动器选型 (3)2.2.1 硬件设备的组成 (3)2.2.2 步进电机系统介绍 (4)2.3 运动控制卡选型 (5)2.4 其它元器件选型 (7)2.3.1 限位开关的使用说明 (7)2.3.2 编码器的使用说明 (8)2.5 小结 (8)第3章位置闭环PID控制系统设计 (10)3.1 引言 (10)3.2 Labview 的介绍 (10)3.2.1 动态链接库的调用 (10)3.2.2 调用库函数节点技术 (12)3.3 闭环PID控制系统设计 (14)3.3.1 板卡初始化设计 (14)3.3.2 开启轴并设置好闭环模式 (16)3.3.3 设置运动参数使其规划运动 (16)3.3.4 PID位置调节 (17)3.4 小结 (18)总结 (20)致谢 (21)参考文献 (22)第1章绪论1.1课题背景及意义在当今这个技术与科技飞速发展的时代,运动控制技术及系统的普及和应用在它本有的进步发展道路上,也带动了其他更多产业的发展,并且与微电子技术、传感器技术、计算机技术等技术的发展和科技的进步共同相互协助发展。
LabVIEW与机器人控制实现精确的运动控制

LabVIEW与机器人控制实现精确的运动控制在实现精确的运动控制方面,LabVIEW与机器人控制的结合发挥了重要作用。
LabVIEW是一种基于图形化编程的开发环境,能够快速构建各种应用程序,而机器人控制则提供了精确的运动控制能力。
本文将介绍如何利用LabVIEW与机器人控制实现精确的运动控制。
一、LabVIEW的特点和优势LabVIEW具有以下特点和优势,正是这些特点和优势使其成为实现精确运动控制的理想选择。
1.图形化编程:LabVIEW使用图形化的编程语言,不需要编写繁琐的代码,只需通过拖拽和连接图形元件即可完成程序的编写。
这使得开发过程更加直观、简单和快速。
2.模块化设计:LabVIEW倡导的模块化设计理念使得程序的编写更加灵活和可维护。
通过将功能模块化,可以提高代码的复用性和可扩展性。
3.丰富的工具箱:LabVIEW提供了丰富的工具箱,包括信号处理、控制系统等,这些工具箱提供了丰富的函数和工具,方便开发者进行各类数据处理和控制操作。
4.良好的可视化界面:LabVIEW的可视化界面非常友好,通过直观的界面可以实时查看数据和控制结果,提高了开发效率和用户体验。
二、机器人控制的基本原理在机器人控制中,关键的基本原理包括运动学、动力学和路径规划等。
下面将简要介绍这些基本原理。
1.运动学:机器人的运动学研究主要涉及机器人的位姿和轨迹规划。
通过对机器人的几何结构和运动参数进行建模和分析,可以实现机器人的精确运动控制。
2.动力学:机器人的动力学研究主要涉及机器人的力学性质和运动响应。
通过对机器人的力学特性进行建模和分析,可以实现机器人的力、力矩和运动响应的精确控制。
3.路径规划:机器人的路径规划是指确定机器人从起始点到目标点的最优轨迹。
通过优化算法和规划方法,可以实现机器人在空间中的精确运动控制。
三、LabVIEW在机器人控制中的应用利用LabVIEW与机器人控制结合,可以实现机器人运动控制的功能和需求。
LabVIEW中的机器人控制与路径规划
LabVIEW中的机器人控制与路径规划机器人控制和路径规划是现代自动化领域中重要的研究方向。
在工业自动化、智能制造以及医疗等领域中,机器人的控制和路径规划技术被广泛应用。
而在这些应用中,LabVIEW作为一种强大的图形化编程语言和开发环境,为机器人控制和路径规划提供了便捷的工具和功能。
一、机器人控制LabVIEW中的机器人控制模块提供了丰富的功能和工具,能够实现对机器人的精确控制。
通过使用基于LabVIEW的硬件接口,用户可以方便地采集和处理机器人的传感器数据,并根据实时反馈进行控制。
LabVIEW提供了多样化的控制器设计方法,如PID控制器、状态反馈控制器等,可以根据实际需求选择合适的控制算法。
在LabVIEW中,用户可以通过图形化编程的方式搭建机器人控制系统。
只需简单拖拽和连接各个组件,就能够实现复杂的控制功能。
同时,LabVIEW还提供了友好的用户界面,可以直观地显示机器人的状态和控制参数,方便用户进行调试和优化。
二、路径规划路径规划是指在给定环境中寻找机器人从起点到达终点的最优路径。
LabVIEW中的路径规划模块提供了多种路径规划算法和工具,可以满足不同场景下的需求。
最常用的路径规划算法包括A*算法、Dijkstra算法和遗传算法等。
这些算法在LabVIEW中都有相应的实现,用户可以根据实际场景选择合适的算法进行路径规划。
LabVIEW还提供了仿真环境,可以对路径规划算法进行验证和优化。
在LabVIEW中,用户可以通过简单的配置和参数设置,实现对机器人的路径规划。
LabVIEW提供了直观的可视化界面,能够帮助用户清晰地展示路径规划结果,并对路径进行实时更新和调整。
三、LabVIEW中的机器人控制与路径规划实例为了更好地理解LabVIEW中的机器人控制与路径规划技术,以下是一个简单的实例。
假设我们有一个巡线机器人,需要在一条黑白相间的赛道上行驶,并且避免碰撞到障碍物。
我们可以使用LabVIEW来控制机器人的移动和路径规划。
利用LabVIEW进行机械臂控制和路径规划
利用LabVIEW进行机械臂控制和路径规划机械臂在现代制造业中起着至关重要的作用,它能够完成人类无法完成的高精度与高重复性的工作任务。
因此,研究和开发机械臂控制系统和路径规划技术成为了当前工程领域中的热点问题。
而LabVIEW 作为一种强大的工程开发平台,提供了丰富的工具和功能来实现机械臂的控制和路径规划。
本文将介绍如何利用LabVIEW进行机械臂控制和路径规划。
一、LabVIEW概述LabVIEW是由美国国家仪器公司(National Instruments)开发的一种图形化编程语言和开发环境。
它采用了数据流的图形化编程方法,通过将各种功能模块连接在一起形成一个图形化的程序,从而实现了快速的开发和调试。
LabVIEW广泛应用于自动化控制、数据采集、图像处理等领域。
二、机械臂控制机械臂控制是指根据给定的任务要求,通过控制机械臂的关节运动实现各种工作操作。
LabVIEW提供了丰富的工具和函数库来实现机械臂控制,包括通信接口、运动控制和数据采集等。
1. 通信接口机械臂通常由多个关节组成,每个关节都需要通过通信接口与控制器进行数据交互。
在LabVIEW中,可以利用串口、以太网等通信方式实现与机械臂控制器的通信,并发送控制命令和接收反馈信号。
2. 运动控制LabVIEW提供了丰富的运动控制功能,可以实现关节角度控制、直线运动和圆弧运动等。
通过设置合适的控制参数和算法,可以实现机械臂的各种运动模式和轨迹规划。
3. 数据采集机械臂控制过程中需要实时采集传感器数据,用于监测机械臂的状态和环境信息。
LabVIEW提供了多种数据采集方式,可以通过传感器接口、数据采集卡等设备实现对传感器信号的采集和处理。
三、路径规划路径规划是指在给定环境条件下,通过选择合适的路径使机械臂从起始位置移动到目标位置。
LabVIEW提供了多种路径规划算法和函数库,可以根据实际需求选择合适的方法。
1. 路径搜索LabVIEW提供了广度优先搜索、最短路径搜索等路径搜索算法,可以在给定的环境中搜索最优路径。
普通运动控制卡在LabVIEW平台上的应用

摘要:介绍了一种在LabVIEW平台上使用普通运动控制卡实现快速开发多轴运动控制程序的方法。
该方法首先应用运动普通控制卡提供的函数库编译成通用动态链接库文件,然后使用LabVIEW与外部代码进行连接的动态连接库机制调用这个文件,实现实时的运动控制。
实践证明,该方法不仅可以很好地发挥运动控制卡的性能,而且可以借助LabVIEW强大的界面编辑功能,缩短程序开发周期,美化人机界面。
关键词:LabVIEW;运动控制卡;动态链接库一、引言LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是美国国家仪器公司(National Instruments)推出一种基于图形语言的开发环境,编程非常方便,人机交互界面直观友好,用户可以创建独立的可执行文件,能够脱离开发环境而单独运行,是目前最流行的虚拟仪器编程平台,广泛应用于测试测量、过程控制、实验室研究与自动化等方面。
在运动控制方面,LabVIEW有专门的运动控制模块,并且NI公司为其所有的运动控制卡配备相应的驱动程序,可以方便实现即插即用功能。
如果用户所使用的板卡不是NI公司的产品,又没有提供与LabVIEW 兼容的驱动程序,就不能为LabVIEW所用。
但是LabVIEW能够通过调用Windows32动态连接库(Dynamic Link Library,简称DLL)来编写与LabVIEW兼容的驱动程序,实现该运动控制卡在LabVIEW 环境下二次开发,不仅可以大大降低成本、缩短开发周期,而且可以使界面美观。
二、应用背景笔者在参与某二自由度运动平台运动仿真项目的研制过程中,选用深圳众为兴数控技术有限公司生产的ADT850型四轴运动控制卡,该型号的卡提供多种版本Windows下的驱动程序和在BorlandC++3.1、VB和VC等多种环境下开发所需的函数库。
虽然在这些编程环境中很容易实现所需的运动控制,但是,如果要开发出一个美观的人机交互界面,将会有很大一部分时间花在程序主界面的编写上。
LabVIEW与运动控制技术实现精确的运动控制和位置反馈

LabVIEW与运动控制技术实现精确的运动控制和位置反馈随着科技的不断进步和应用领域的扩大,各种控制系统逐渐成为工业自动化中的重要组成部分。
在众多控制技术中,LabVIEW与运动控制技术的结合为实现精确的运动控制和位置反馈提供了一种高效可行的方案。
本文将介绍LabVIEW与运动控制技术的原理和应用,并探讨其在实际工程中的意义和作用。
一、LabVIEW与运动控制技术概述1.1 LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种基于图形化编程语言G语言的集成开发环境。
它通过将计算机软件和硬件结合起来,实现了对各类仪器设备的高效控制和数据采集处理。
LabVIEW由美国国家仪器公司(NI)开发,广泛应用于自动化控制、测试测量、数据采集等领域。
1.2 运动控制技术简介运动控制技术是指通过控制设备的运动轨迹和速度,实现对设备位置和运动状态的精确控制。
在工业自动化生产中,运动控制技术常用于机器人、数控机床、自动化输送线等设备中,以实现高效稳定的生产流程。
二、LabVIEW在运动控制中的应用2.1 运动控制与数据采集的结合LabVIEW通过与各类运动控制设备的连接,实现了控制信号与数据采集信号的实时传输和处理。
通过LabVIEW平台,我们可以轻松地对设备的位置、速度、加速度等参数进行监控和调节,进而实现对设备的精确控制。
2.2 运动控制中的位置反馈精确的位置反馈是实现运动控制的关键因素之一。
LabVIEW提供了灵活的编程接口,可以与各类位置传感器(如编码器、激光测距仪等)进行无缝集成。
通过实时采集并处理传感器数据,LabVIEW可以准确获取设备的位置信息,并与设定的目标位置进行比较和调整,实现精确的位置控制。
2.3 运动控制系统的协同组合在复杂的工业控制系统中,通常会涉及多个运动控制设备的协同工作。
LabVIEW提供了灵活且强大的编程能力,可以通过编写程序实现不同设备的协调控制。
使用LabVIEW进行运动控制实现精准的位置和速度控制
使用LabVIEW进行运动控制实现精准的位置和速度控制近年来,随着工业自动化的快速发展,运动控制技术在各个领域的应用日益广泛。
而LabVIEW作为一种强大的图形化开发环境,可以帮助工程师们实现精准的位置和速度控制,具有很高的实用性和灵活性。
本文将介绍如何使用LabVIEW进行运动控制,实现精准的位置和速度控制。
一、LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种用于快速进行系统测量和控制的图形化开发环境。
它允许使用者通过图形化编程而非传统的文本编程方式来开发应用程序,极大地提高了开发效率和易用性。
二、运动控制基础知识在进行实际的运动控制之前,我们首先需要了解一些基本的运动控制概念。
1. 位置控制:即控制物体在运动过程中的位置,使其精确地到达目标位置。
2. 速度控制:即控制物体在运动过程中的速度,使其按照既定速度运行。
3. 加速度控制:即控制物体在运动过程中的加速度,使其具有平稳的加速和减速过程。
三、LabVIEW中的运动控制LabVIEW提供了丰富的运动控制函数和工具箱,使得进行精准的位置和速度控制变得更加简单和便捷。
1. 运动控制模块(Motion Control Module):该模块提供了一系列用于控制运动装置的函数和工具箱。
我们可以通过该模块实现对电机、伺服、步进驱动器等设备的运动控制。
2. 实时运动控制器(Real-Time Control Module):该模块基于实时操作系统RTX和硬实时通信,实现了精确的实时运动控制。
能够满足更高精度、更快速度的运动要求。
四、使用LabVIEW进行位置控制下面以步进电机为例,介绍如何使用LabVIEW进行位置控制。
1. 配置硬件:将步进电机与控制器连接,并确保硬件配置无误。
2. 创建控制程序:在LabVIEW中创建一个新项目,选择合适的步进电机控制器和驱动器。