arm链接文件规则(mynote)
(完整版)ARM汇编指令英文全称及功能描述V2.0
1 ARM指令英文全称及功能描述V2.0作者:满光明2019年4月9日转载请支持原创,保留此页信息,否则将追究责任前言我在工作前买了一本关于ARM指令的书籍,当时出于方便记忆理解的考量,整理了ARM指令,并且加入了英文的全称。
了解了英文的全称,能够好的帮助记忆和理解。
百度网盘里分享出来的ARM 指令英文全称我看了一下都是我当年整理的版本,但他们把作者的名字去掉了。
几年过去了,ARM技术取得了巨大的进步,ARM以其低功耗、低成本、高性能的优势抢占了移动市场。
相信在不远的未来,ARM会普遍运行在个人电脑和服务器上。
在可穿戴、边缘计算等前沿领域ARM拥有无与伦比的优势。
作为一个技术控,工作以来我一直从事ARM相关的开发工作,计算机领域需要学习的东西太多,但很多基础知识都是相通的。
我也希望能把自己这么多年的技术积累拿出来分享给即将走上硬件开发、底层驱动开发的同仁们本篇仍然以介绍ARM架构以及ARM指令为主,在原来的基础上重新调整了指令顺序,首先介绍ARM 架构不同版本的区别,进而引出基本指令结构,最后详细列出所有指令详表,增强可读性,易于理解。
2一、ARM指令集版本历史计算机完成一定的操作通过指令来实现,不同的指令方式被称为计算机架构,目前计算机主要有两大架构阵营,一是CISC (Complex Instruction Set Computers)复杂指令集架构,另一种是RISC(Reduced Instruction Set Computers)精简指令集架构。
采用CISC架构的代表是Intel和AMD的X86指令集,采用RISC架构的代表是ARM指令集和PowerPC指令集。
ARM架构从诞生到今天从V1版本已经升级到了V8版本,各版本代表的分支型号如下表所示。
从图中可以看出,Cortex-A9 架构的CPU采用的是ARMv7的指令集,目前高性能的64位视频处理,比如Cortex-A72,采用的是ARMv8指令集。
ARM LD文件说明
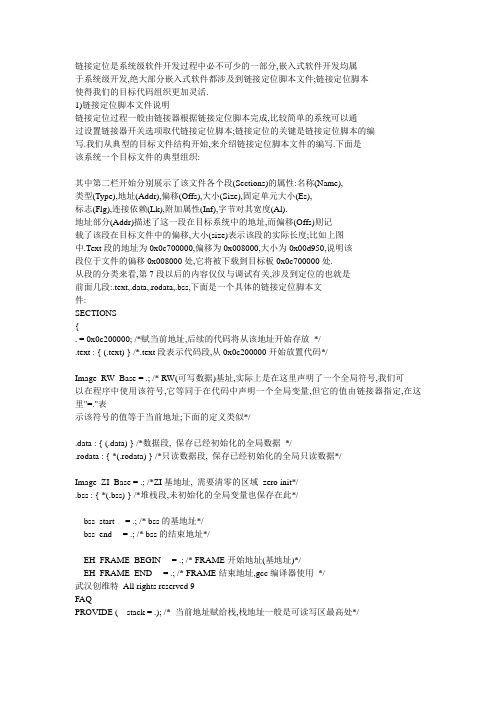
链接定位是系统级软件开发过程中必不可少的一部分,嵌入式软件开发均属于系统级开发,绝大部分嵌入式软件都涉及到链接定位脚本文件;链接定位脚本使得我们的目标代码组织更加灵活.1)链接定位脚本文件说明链接定位过程一般由链接器根据链接定位脚本完成,比较简单的系统可以通过设置链接器开关选项取代链接定位脚本;链接定位的关键是链接定位脚本的编写.我们从典型的目标文件结构开始,来介绍链接定位脚本文件的编写.下面是该系统一个目标文件的典型组织:其中第二栏开始分别展示了该文件各个段(Sections)的属性:名称(Name),类型(Type),地址(Addr),偏移(Offs),大小(Size),固定单元大小(Es),标志(Flg),连接依赖(Lk),附加属性(Inf),字节对其宽度(Al).地址部分(Addr)描述了这一段在目标系统中的地址,而偏移(Offs)则记载了该段在目标文件中的偏移,大小(size)表示该段的实际长度;比如上图中.Text段的地址为0x0c700000,偏移为0x008000,大小为0x00d950,说明该段位于文件的偏移0x008000处,它将被下载到目标板0x0c700000处.从段的分类来看,第7段以后的内容仅仅与调试有关,涉及到定位的也就是前面几段:.text,.data,.rodata,.bss,下面是一个具体的链接定位脚本文件:SECTIONS{. = 0x0c200000; /*赋当前地址,后续的代码将从该地址开始存放*/.text : { (.text) } /*.text段表示代码段,从0x0c200000开始放置代码*/Image_RW_Base = .; /* RW(可写数据)基址,实际上是在这里声明了一个全局符号,我们可以在程序中使用该符号,它等同于在代码中声明一个全局变量,但它的值由链接器指定,在这里"=."表示该符号的值等于当前地址;下面的定义类似*/.data : { (.data) } /*数据段, 保存已经初始化的全局数据*/.rodata : { *(.rodata) } /*只读数据段, 保存已经初始化的全局只读数据*/Image_ZI_Base = .; /*ZI基地址, 需要清零的区域zero init*/.bss : { *(.bss) } /*堆栈段,未初始化的全局变量也保存在此*/__bss_start__ = .; /* bss的基地址*/__bss_end__ = .; /* bss的结束地址*/__EH_FRAME_BEGIN__ = .; /* FRAME开始地址(基地址)*/__EH_FRAME_END__ = .; /* FRAME结束地址,gcc编译器使用*/武汉创维特All rights reserved 9FAQPROVIDE (__stack = .); /* 当前地址赋给栈,栈地址一般是可读写区最高处*/end = .; /* 结束地址*/_end = .; /* 结束地址*/.debug_info 0 : { *(.debug_info) } /*调试信息*/.debug_line 0 : { *(.debug_line) } /*调试信息*/.debug_abbrev 0 : { *(.debug_abbrev)} /*调试信息*/.debug_frame 0 : { *(.debug_frame) } /*调试信息*/}text段是程序代码段,紧随其后的是几个符号定义,它们是由编译器在编译连接时自动计算的,当我们在链接定位文件中申明这些符号后,编译连接时,该符号的值会自动代入到源程序的引用中,如果你想进一步了解连接定位的一些含义,可以参考编程手册中的ld一章.data段的起始位置也是由连接定位文件所确定,大小在编译连接时自动分配,它和我们的程序大小没有关系,但和程序使用到的全局变量,常量数量相关. bss的初始值也是由我们自己定义的连接定位文件所确定,我们应该将它定义在可读写的RAM区内,stack的顶部在可读写的RAM区的最后,我们可以非常灵活的定义其起点和大小,但对大部分情况来说,程序区在ROM或FLASH中,可读写区域在SRAM或DRAM中,我们可以考虑一下自己程序规模,函数调用规模, 存储器组织,然后参照一个连接定位文件稍加修改就可以了.2)链接定位脚本修改实例SECTIONS{. = 0x00000000; /*将代码段起始地址修改到0*/.text : { *(.text) }Image_RW_Base = .;.=0xc0000000 /*设置数据段从0xc0000000开始存放*/.data : { *(.data) }.=0xd0000000 /*设置只读数据段从0xd0000000开始存放*/.rodata : { *(.rodata) }Image_ZI_Base = .;.bss : { *(.bss) }Image_ZI_Limit = .;/*申明一个符号download_size */download_size = SIZEOF(.text)+SIZEOF(.data)+SIZEOF(.rodata)+SIZEOF(.bss);__bss_start__ = .;__bss_end__ = .;。
ARM汇编 -- 嵌入式学习博客(转载)
ARM汇编ARM汇编学习笔记 2008-06-8 07:01:05大中小标签:IT/科技这两天参加了一个编写操作系统的项目,因为要做很多底层的东西,而且这个操作系统是嵌入式的,所以开始学习ARM汇编,发现ARM汇编和一般PC 平台上的汇编有很多不同,但主要还是关键字和伪码上的,其编程思想还是相同的。
现将一些学习感悟部分列出来,希望能给有问题的人一点帮助。
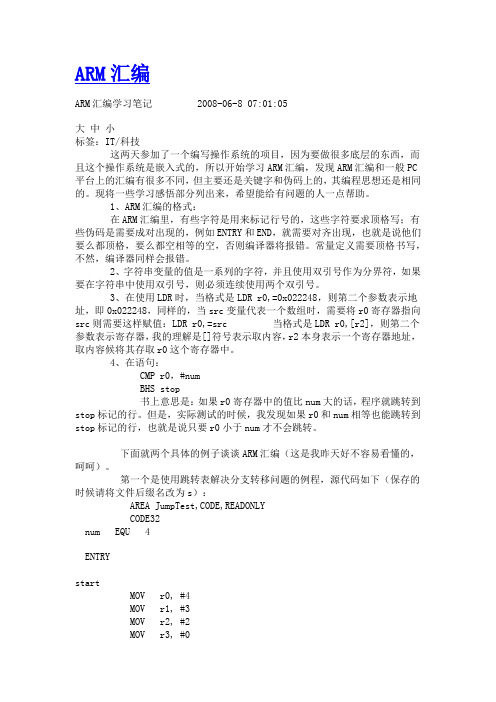
1、ARM汇编的格式:在ARM汇编里,有些字符是用来标记行号的,这些字符要求顶格写;有些伪码是需要成对出现的,例如ENTRY和END,就需要对齐出现,也就是说他们要么都顶格,要么都空相等的空,否则编译器将报错。
常量定义需要顶格书写,不然,编译器同样会报错。
2、字符串变量的值是一系列的字符,并且使用双引号作为分界符,如果要在字符串中使用双引号,则必须连续使用两个双引号。
3、在使用LDR时,当格式是LDR r0,=0x022248,则第二个参数表示地址,即0x022248,同样的,当src变量代表一个数组时,需要将r0寄存器指向src则需要这样赋值:LDR r0,=src 当格式是LDR r0,[r2],则第二个参数表示寄存器,我的理解是[]符号表示取内容,r2本身表示一个寄存器地址,取内容候将其存取r0这个寄存器中。
4、在语句:CMP r0,#numBHS stop书上意思是:如果r0寄存器中的值比num大的话,程序就跳转到stop标记的行。
但是,实际测试的时候,我发现如果r0和num相等也能跳转到stop标记的行,也就是说只要r0小于num才不会跳转。
下面就两个具体的例子谈谈ARM汇编(这是我昨天好不容易看懂的,呵呵)。
第一个是使用跳转表解决分支转移问题的例程,源代码如下(保存的时候请将文件后缀名改为s):AREA JumpTest,CODE,READONLYCODE32num EQU 4ENTRYstartMOV r0, #4MOV r1, #3MOV r2, #2MOV r3, #0CMP r0, #numBHS stopADR r4, JumpTableCMP r0, #2MOVEQ r3, #0LDREQ pc, [r4,r3,LSL #2]CMP r0, #3MOVEQ r3, #1LDREQ pc, [r4,r3,LSL #2]CMP r0, #4MOVEQ r3, #2LDREQ pc, [r4,r3,LSL #2]CMP r0, #1MOVEQ r3, #3LDREQ pc, [r4,r3,LSL #2]DEFAULTMOVEQ r0, #0 SWITCHENDstopMOV r0, #0x18LDR r1, =0x20026SWI 0x123456JumpTableDCD CASE1DCD CASE2DCD CASE3DCD CASE4DCD DEFAULTCASE1ADD r0, r1, r2B SWITCHENDCASE2SUB r0, r1, r2B SWITCHENDCASE3ORR r0, r1, r2B SWITCHENDCASE4AND r0, r1, r2B SWITCHENDEND程序其实很简单,可见我有多愚笨!还是简要介绍一下这段代码吧。
ARM_notes
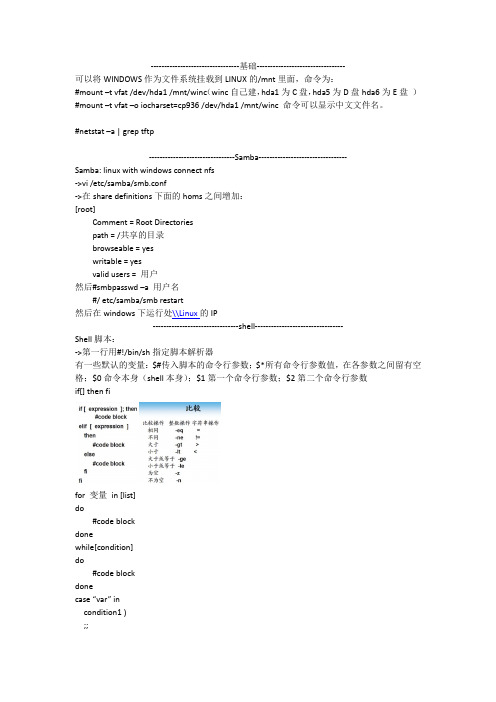
---------------------------------基础---------------------------------可以将WINDOWS作为文件系统挂载到LINUX的/mnt里面,命令为:#mount –t vfat /dev/hda1 /mnt/winc(winc自己建,hda1为C盘,hda5为D盘hda6为E盘)#mount –t vfat –o iocharset=cp936 /dev/hda1 /mnt/winc 命令可以显示中文文件名。
#netstat –a | grep tftp--------------------------------Samba---------------------------------Samba: linux with windows connect nfs->vi /etc/samba/smb.conf->在share definitions下面的homs之间增加:[root]Comment = Root Directoriespath = /共享的目录browseable = yeswritable = yesvalid users = 用户然后#smbpasswd –a 用户名#/ etc/samba/smb restart然后在windows下运行处\\Linux的IP--------------------------------shell---------------------------------Shell脚本:->第一行用#!/bin/sh指定脚本解析器有一些默认的变量:$#传入脚本的命令行参数;$*所有命令行参数值,在各参数之间留有空格;$0命令本身(shell本身);$1第一个命令行参数;$2第二个命令行参数if[] then fifor 变量in [list]do#code blockdonewhile[condition]do#code blockdonecase “var” incondition1 );;condition2);;*)default statements;;esacqcd脚本工具不属于Linux系统库的头文件编译时要加上–文件名--------------------------------文件编程---------------------------------1/创建: int creat(const char *filename, mode_t mode)模式:S_IRUSR or 4可读S_IWUSR or2可写S_IXUSR or 1可执行S_IRWXU可读可写可执行2/打开:int open(const char *pathname, int flags) int open(const char *pathname, int flags, mode_t mode)打开标志flags: O_RDONLY O_WRONLY O_RDWR O_APPEND追加O_CREAT O_NOBLOCK 非阻塞3/关闭:int close(int fd) fd文件描述符,打开时的返回值4/读:int read(int fd, const void *buf, size_t length) fd=文件描述符,读length个字节到buf指向的缓冲区。
ARM LD文件说明
链接定位是系统级软件开发过程中必不可少的一部分,嵌入式软件开发均属于系统级开发,绝大部分嵌入式软件都涉及到链接定位脚本文件;链接定位脚本使得我们的目标代码组织更加灵活.1)链接定位脚本文件说明链接定位过程一般由链接器根据链接定位脚本完成,比较简单的系统可以通过设置链接器开关选项取代链接定位脚本;链接定位的关键是链接定位脚本的编写.我们从典型的目标文件结构开始,来介绍链接定位脚本文件的编写.下面是该系统一个目标文件的典型组织:其中第二栏开始分别展示了该文件各个段(Sections)的属性:名称(Name),类型(Type),地址(Addr),偏移(Offs),大小(Size),固定单元大小(Es),标志(Flg),连接依赖(Lk),附加属性(Inf),字节对其宽度(Al).地址部分(Addr)描述了这一段在目标系统中的地址,而偏移(Offs)则记载了该段在目标文件中的偏移,大小(size)表示该段的实际长度;比如上图中.Text段的地址为0x0c700000,偏移为0x008000,大小为0x00d950,说明该段位于文件的偏移0x008000处,它将被下载到目标板0x0c700000处.从段的分类来看,第7段以后的内容仅仅与调试有关,涉及到定位的也就是前面几段:.text,.data,.rodata,.bss,下面是一个具体的链接定位脚本文件:SECTIONS{. = 0x0c200000; /*赋当前地址,后续的代码将从该地址开始存放*/.text : { (.text) } /*.text段表示代码段,从0x0c200000开始放置代码*/Image_RW_Base = .; /* RW(可写数据)基址,实际上是在这里声明了一个全局符号,我们可以在程序中使用该符号,它等同于在代码中声明一个全局变量,但它的值由链接器指定,在这里"=."表示该符号的值等于当前地址;下面的定义类似*/.data : { (.data) } /*数据段, 保存已经初始化的全局数据*/.rodata : { *(.rodata) } /*只读数据段, 保存已经初始化的全局只读数据*/Image_ZI_Base = .; /*ZI基地址, 需要清零的区域zero init*/.bss : { *(.bss) } /*堆栈段,未初始化的全局变量也保存在此*/__bss_start__ = .; /* bss的基地址*/__bss_end__ = .; /* bss的结束地址*/__EH_FRAME_BEGIN__ = .; /* FRAME开始地址(基地址)*/__EH_FRAME_END__ = .; /* FRAME结束地址,gcc编译器使用*/武汉创维特All rights reserved 9FAQPROVIDE (__stack = .); /* 当前地址赋给栈,栈地址一般是可读写区最高处*/end = .; /* 结束地址*/_end = .; /* 结束地址*/.debug_info 0 : { *(.debug_info) } /*调试信息*/.debug_line 0 : { *(.debug_line) } /*调试信息*/.debug_abbrev 0 : { *(.debug_abbrev)} /*调试信息*/.debug_frame 0 : { *(.debug_frame) } /*调试信息*/}text段是程序代码段,紧随其后的是几个符号定义,它们是由编译器在编译连接时自动计算的,当我们在链接定位文件中申明这些符号后,编译连接时,该符号的值会自动代入到源程序的引用中,如果你想进一步了解连接定位的一些含义,可以参考编程手册中的ld一章.data段的起始位置也是由连接定位文件所确定,大小在编译连接时自动分配,它和我们的程序大小没有关系,但和程序使用到的全局变量,常量数量相关. bss的初始值也是由我们自己定义的连接定位文件所确定,我们应该将它定义在可读写的RAM区内,stack的顶部在可读写的RAM区的最后,我们可以非常灵活的定义其起点和大小,但对大部分情况来说,程序区在ROM或FLASH中,可读写区域在SRAM或DRAM中,我们可以考虑一下自己程序规模,函数调用规模, 存储器组织,然后参照一个连接定位文件稍加修改就可以了.2)链接定位脚本修改实例SECTIONS{. = 0x00000000; /*将代码段起始地址修改到0*/.text : { *(.text) }Image_RW_Base = .;.=0xc0000000 /*设置数据段从0xc0000000开始存放*/.data : { *(.data) }.=0xd0000000 /*设置只读数据段从0xd0000000开始存放*/.rodata : { *(.rodata) }Image_ZI_Base = .;.bss : { *(.bss) }Image_ZI_Limit = .;/*申明一个符号download_size */download_size = SIZEOF(.text)+SIZEOF(.data)+SIZEOF(.rodata)+SIZEOF(.bss);__bss_start__ = .;__bss_end__ = .;。
ARM汇编的一些规范
ARM汇编的一些规范A.5.1 文件格式ARM 源程序文件(即源文件)为文件格式,可以使用任一文本编辑器编写程序代码。
在一个项目中,至少要有一个汇编源文件或C 程序文件,可以有多个汇编源文件或多个C 程序文件,或者C 程序文件和汇编文件两者的组合。
A.5.2 ARM 汇编的一些规范(1)汇编语句格式ARM 汇编中,所有标号必须在一行的顶格书写,其后面不要添加“:”,而所有指令均不能顶格书写。
ARM 汇编器对标识符大小写敏感,书写标号及指令时字母大小写要一致,在ARM 汇编程序中,一个ARM 指令、伪指令、寄存器名可以全部为大写字母,也可以全部为小写字母,但不要大小写混合使用。
注释使用“;”,注释内容由“;”开始到此行结束,注释可以在一行的顶格书写。
格式:[标号] <指令|条件|S> <操作数>[;注释]源程序中允许有空行,适当地插入空行可以提高源代码的可读性。
如果单行太长,可以使用字符“”将其分行,“”后不能有任何字符,包括空格和制表符等。
对于变量的设置,常量的定义,其标识符必须在一行的顶格书写。
汇编指令正确的例子和错误的例子如下:正确的例子:…Str1 SETS My string1.” ;设置字符串变量Str1Count RN R0 ;定义寄存器名CountUSR_STACK EQU 64 ;定义常量START LDR R0,=0x1123456 ;R0=0x123456HMOV R1,#0LOOPMOV R2,#3…错误的例子:START MOV R0,#1 ;标号START 没有顶格写ABC: MOV R1,#2 ;标号后不能带:MOV R2,#3 ;命令不允许顶格书写loop Mov R2,#3 ;指令中大小写混合B Loop ;无法跳转到Loop 标号(2)标号在ARM 汇编中,标号代表一个地址,段内标号的地址在汇编时确定,而段外标号的地址值在连接时确定。
根据标号的生成方式,可以有以下3 钟:基于PC 的标号基于PC 的标号时位于目标指令前的标号或程序中的数据定义伪指令前的标号,这种标号在汇编时将被处理成PC 值加上或减去一个数字常量。
ARM映像文件及其地址映射.
ARM映像文件及其地址映射2010-06-24 14:161、什么是arm的映像文件,arm映像文件其实就是可执行文件,包括bin或hex两种格式,可以直接烧到ROM里执行。
在axd调试过程中,我们调试的是axf文件,其实这也是一种映像文件,它只是在bin文件中加了一个文件头和一些调试信息。
映像文件一般由域组成,域最多由三个输出段组成(RO,RW,ZI),输出段又由输入段组成。
所谓域,指的就是整个bin映像文件所处在的区域,它又分为加载域和运行域。
对于嵌入式系统而言,程序映象都是存储在Flash存储器等一些非易失性器件中的,而在运行时,程序中的RW段必须重新装载到可读写的RAM中。
简单来说,程序的加载时域就是指程序烧入Flash中的状态,运行时域是指程序执行时的状态。
一般来说flash里的整个bin文件所在的地址空间就是加载域,当然在程序一般都不会放在 flash里执行,一般都会搬到sdram里运行工作,它们在被搬到sdram里工作所处的地址空间就是运行域。
我们输入的代码,一般有代码部分和数据部分,这就是所谓的输入段,经过编译后就变成了bin文件中ro段和rw段,还有所谓的zi段,这就是输出段。
在ARM的集成开发环境中,只读的代码段和常量被称作RO段(ReadOnly);可读写的全局变量和静态变量被称作RW 段(ReadWrite);RW段中要被初始化为零的变量被称为ZI段(ZeroInit)。
对于加载域中的输出段,一般来说RO段后面紧跟着RW段,RW段后面紧跟着ZI段。
在运行域中这些输出段并不连续,但RW和ZI一定是连着的。
ZI段和RW段中的数据其实可以是RW属性。
2、简单地址映射对于比较简单的情况,可以在ADS集成开发环境的ARM LINKER选项output中指定RO Base和RW Base,即在simple模式下,告知连接器RO和RW的连接基地址。
这种模式下,ARM Linker会输出以下符号,它们指示了在运行域中各个输出段所处的地址空间,在使用的时候可以用IMPORT引入:| Image$$RO$$Base|:表示RO段在运行域中的起始地址|Image$$RO$$Limit|:表示RO区末地址后面的地址,即RW数据源的起始地址|Image$$RW$$Base|:RW区在RAM里的执行区起始地址,也就是编译器选项RW_Base指定的地址|Image$$ZI$$Base|:ZI区在RAM里面的起始地址|Image$$ZI$$Limit|:ZI区在RAM里面的结束地址后面的一个地址RO Base对应的就是| Image$$RO$$Base|,RW Base 对应的是|Image$$RW$$Base|,由于ZI段是包含在RW段里的,所以|Image$$RW$$Limit| 就等于|Image$$ZI$$limit| 。
(完整版)ARM汇编指令英文全称及功能描述V2.0
1 ARM指令英文全称及功能描述V2.0作者:满光明2019年4月9日转载请支持原创,保留此页信息,否则将追究责任前言我在工作前买了一本关于ARM指令的书籍,当时出于方便记忆理解的考量,整理了ARM指令,并且加入了英文的全称。
了解了英文的全称,能够好的帮助记忆和理解。
百度网盘里分享出来的ARM 指令英文全称我看了一下都是我当年整理的版本,但他们把作者的名字去掉了。
几年过去了,ARM技术取得了巨大的进步,ARM以其低功耗、低成本、高性能的优势抢占了移动市场。
相信在不远的未来,ARM会普遍运行在个人电脑和服务器上。
在可穿戴、边缘计算等前沿领域ARM拥有无与伦比的优势。
作为一个技术控,工作以来我一直从事ARM相关的开发工作,计算机领域需要学习的东西太多,但很多基础知识都是相通的。
我也希望能把自己这么多年的技术积累拿出来分享给即将走上硬件开发、底层驱动开发的同仁们本篇仍然以介绍ARM架构以及ARM指令为主,在原来的基础上重新调整了指令顺序,首先介绍ARM 架构不同版本的区别,进而引出基本指令结构,最后详细列出所有指令详表,增强可读性,易于理解。
2一、ARM指令集版本历史计算机完成一定的操作通过指令来实现,不同的指令方式被称为计算机架构,目前计算机主要有两大架构阵营,一是CISC (Complex Instruction Set Computers)复杂指令集架构,另一种是RISC(Reduced Instruction Set Computers)精简指令集架构。
采用CISC架构的代表是Intel和AMD的X86指令集,采用RISC架构的代表是ARM指令集和PowerPC指令集。
ARM架构从诞生到今天从V1版本已经升级到了V8版本,各版本代表的分支型号如下表所示。
从图中可以看出,Cortex-A9 架构的CPU采用的是ARMv7的指令集,目前高性能的64位视频处理,比如Cortex-A72,采用的是ARMv8指令集。
arm neon指令的格式
ARM NEON指令的格式通常包括以下部分:
1. 操作码(Opcode):这是指令的核心部分,用于指示要执行的运算类型。
2. 操作数:这些是参与运算的数值或数据。
在NEON指令中,操作数可以是向量(V)或标量(S)。
3. 操作数修饰符(Qualifiers):这些修饰符可以改变指令的行为。
例如,Q修饰符可以指示指令在两个128位向量操作数上进行操作,产生一个128位的结果。
4. 特殊修饰符(Special Qualifiers):这些修饰符可以进一步改变指令的行为。
例如,L修饰符可以指示指令将两个128位向量操作数相加,产生一个64位的向量结果。
具体的NEON指令格式可能会因具体的指令而异,因此需要查阅ARM 的官方文档以获取更准确的信息。
ARMLD文件说明.
链接定位是系统级软件开发过程中必不可少的一部分,嵌入式软件开发均属于系统级开发,绝大部分嵌入式软件都涉及到链接定位脚本文件;链接定位脚本使得我们的目标代码组织更加灵活.1)链接定位脚本文件说明链接定位过程一般由链接器根据链接定位脚本完成,比较简单的系统可以通过设置链接器开关选项取代链接定位脚本;链接定位的关键是链接定位脚本的编写.我们从典型的目标文件结构开始,来介绍链接定位脚本文件的编写.下面是该系统一个目标文件的典型组织:其中第二栏开始分别展示了该文件各个段(Sections)的属性:名称(Name),类型(Type),地址(Addr),偏移(Offs),大小(Size),固定单元大小(Es),标志(Flg),连接依赖(Lk),附加属性(Inf),字节对其宽度(Al).地址部分(Addr)描述了这一段在目标系统中的地址,而偏移(Offs)则记载了该段在目标文件中的偏移,大小(size)表示该段的实际长度;比如上图中.Text段的地址为0x0c700000,偏移为0x008000,大小为0x00d950,说明该段位于文件的偏移0x008000处,它将被下载到目标板0x0c700000处.从段的分类来看,第7段以后的内容仅仅与调试有关,涉及到定位的也就是前面几段:.text,.data,.rodata,.bss,下面是一个具体的链接定位脚本文件:SECTIONS{. = 0x0c200000; /*赋当前地址,后续的代码将从该地址开始存放*/.text : { (.text) } /*.text段表示代码段,从0x0c200000开始放置代码*/Image_RW_Base = .; /* RW(可写数据)基址,实际上是在这里声明了一个全局符号,我们可以在程序中使用该符号,它等同于在代码中声明一个全局变量,但它的值由链接器指定,在这里"=."表示该符号的值等于当前地址;下面的定义类似*/.data : { (.data) } /*数据段, 保存已经初始化的全局数据*/.rodata : { *(.rodata) } /*只读数据段, 保存已经初始化的全局只读数据*/Image_ZI_Base = .; /*ZI基地址, 需要清零的区域zero init*/.bss : { *(.bss) } /*堆栈段,未初始化的全局变量也保存在此*/__bss_start__ = .; /* bss的基地址*/__bss_end__ = .; /* bss的结束地址*/__EH_FRAME_BEGIN__ = .; /* FRAME开始地址(基地址)*/__EH_FRAME_END__ = .; /* FRAME结束地址,gcc编译器使用*/武汉创维特All rights reserved 9FAQPROVIDE (__stack = .); /* 当前地址赋给栈,栈地址一般是可读写区最高处*/end = .; /* 结束地址*/_end = .; /* 结束地址*/.debug_info 0 : { *(.debug_info) } /*调试信息*/.debug_line 0 : { *(.debug_line) } /*调试信息*/.debug_abbrev 0 : { *(.debug_abbrev)} /*调试信息*/.debug_frame 0 : { *(.debug_frame) } /*调试信息*/}text段是程序代码段,紧随其后的是几个符号定义,它们是由编译器在编译连接时自动计算的,当我们在链接定位文件中申明这些符号后,编译连接时,该符号的值会自动代入到源程序的引用中,如果你想进一步了解连接定位的一些含义,可以参考编程手册中的ld一章.data段的起始位置也是由连接定位文件所确定,大小在编译连接时自动分配,它和我们的程序大小没有关系,但和程序使用到的全局变量,常量数量相关. bss的初始值也是由我们自己定义的连接定位文件所确定,我们应该将它定义在可读写的RAM区内,stack的顶部在可读写的RAM区的最后,我们可以非常灵活的定义其起点和大小,但对大部分情况来说,程序区在ROM或FLASH中,可读写区域在SRAM或DRAM中,我们可以考虑一下自己程序规模,函数调用规模, 存储器组织,然后参照一个连接定位文件稍加修改就可以了.2)链接定位脚本修改实例SECTIONS{. = 0x00000000; /*将代码段起始地址修改到0*/.text : { *(.text) }Image_RW_Base = .;.=0xc0000000 /*设置数据段从0xc0000000开始存放*/.data : { *(.data) }.=0xd0000000 /*设置只读数据段从0xd0000000开始存放*/.rodata : { *(.rodata) }Image_ZI_Base = .;.bss : { *(.bss) }Image_ZI_Limit = .;/*申明一个符号download_size */download_size = SIZEOF(.text)+SIZEOF(.data)+SIZEOF(.rodata)+SIZEOF(.bss);__bss_start__ = .;__bss_end__ = .;。
arm 编译链接原理
ARM编译链接原理主要涉及到两个主要阶段:编译阶段和链接阶段。
1.编译阶段:编译器将源代码(通常是C或C++代码)
转换成目标代码。
这个过程中,编译器会处理源代码中的语法和语义,生成相应的汇编代码,并最终将汇编代码转换成机器码(即目标代码)。
ARM编译器(如RVDS)在这个阶段会进行一系列的优化,以提高代码的执行效率,如提升代码密度、提高代码执行速度等。
此外,编译器还会生成调试信息,以便在后续的调试过程中使用。
2.链接阶段:链接器将编译阶段生成的目标代码与所需的
库函数进行链接,生成可执行文件。
链接过程涉及将各个目标文件组合成一个单一的可执行文件,同时处理符号解析和重定位等问题。
在这个过程中,链接器会检查目标文件之间的依赖关系,解决符号引用的问题,并生成相应的符号表、重定位表等信息。
最终,链接器会生成一个可执行文件,该文件可以直接在ARM平台上运行。
总的来说,ARM编译链接原理就是通过编译器和链接器的协同工作,将源代码转换成可在ARM平台上运行的可执行文件。
在这个过程中,编译器和链接器会进行一系列的优化和处理,以确保生成的代码具有高效性、稳定性和可调试性。
arm架构过程调用标准
arm架构过程调用标准ARM架构(Advanced RISC Machine)是一种广泛应用于嵌入式系统和移动设备的指令集架构。
在ARM架构中,过程调用标准(Procedure Call Standard)定义了一套规则和约定,以确保不同编译器生成的目标文件之间可以正确地进行函数调用和参数传递。
在本篇文章中,我们将一步一步回答关于ARM架构中过程调用标准的问题。
第一部分:引言在软件开发中,函数调用和参数传递是不可或缺的基本操作。
然而,由于不同编译器可能生成不同的目标文件,为了确保函数调用和参数传递的正确性,需要制定一套标准,这就是过程调用标准。
第二部分:ARM架构基础在开始讨论过程调用标准之前,有必要先了解一些关于ARM架构的基础知识。
ARM架构以精简指令集计算机(RISC,Reduced Instruction Set Computer)为基础,具有简单指令集、高效执行和低功耗等优势。
ARM 架构包含多个版本,如ARMv6、ARMv7和ARMv8等,每个版本都有其特定的过程调用标准。
第三部分:过程调用标准概述过程调用标准定义了一套规则和约定,确保函数调用和参数传递的正确性。
它包含了函数调用过程中各个寄存器的使用、栈帧的组织和参数传递等方面的规定。
过程调用标准通常分为两个层次:应用二进制接口(ABI,Application Binary Interface)和函数调用约定(Procedure Call Convention)。
第四部分:ARM架构中的过程调用标准ARM架构中有多个过程调用标准,如ARM Procedure Call Standard (APCS)、ARM Procedure Call Standard for the ARM Architecture (AAPCS)和ARM 64-bit Procedure Call Standard(AAPCS64)等。
这些过程调用标准根据不同的ARM架构版本和编译器而有所不同,但它们之间有一些共同的特点。
ARM汇编语言简介一
ARM汇编语言简介一ARM汇编语言是一种低级编程语言,用于编写针对ARM处理器的程序。
在本文中,我们将介绍ARM汇编语言的基本概念、语法规则和一些常用指令。
一、ARM汇编语言的概述ARM汇编语言是一种面向ARM处理器的低级语言。
它与高级语言(如C、C++)相比,更加接近机器语言,并且直接操作硬件。
使用ARM汇编语言编写的程序可以直接调用底层硬件资源,具有高效性和灵活性的特点。
二、ARM汇编语言的语法规则1. 注释:在ARM汇编语言中,以分号(;)开头的内容被认为是注释,不会被计算机执行。
注释用于标明代码的作用、解释代码的功能等,提高代码的可读性。
2. 指令:ARM汇编语言的指令由助记符(mnemonic)和操作数(operand)组成。
助记符表示特定的指令操作,操作数指定了指令操作的具体对象。
3. 寄存器:ARM处理器具有16个通用寄存器,用于存储数据和地址。
这些寄存器通常用r0-r15表示,其中r0-r12为通用寄存器,r13为堆栈指针寄存器(SP),r14为链接寄存器(LR),r15为程序计数器(PC)。
4. 伪指令:ARM汇编语言中还包含一些伪指令(pseudo-instruction),这些指令并不被处理器直接执行,而是由汇编器(assembler)进行处理。
伪指令通常用于定义数据、声明变量、控制程序的组织结构等。
三、ARM汇编语言的常用指令1. 数据传输指令:数据传输指令用于在寄存器和内存之间传输数据。
常见的数据传输指令包括LDR(加载数据到寄存器)、STR(存储数据到内存)、MOV(将数据从源寄存器复制到目标寄存器)等。
2. 算术运算指令:算术运算指令用于执行基本的算术运算,如加法、减法、乘法和除法。
常见的算术运算指令包括ADD(加法)、SUB(减法)、MUL (乘法)等。
3. 逻辑运算指令:逻辑运算指令用于执行逻辑运算,如与、或、异或、移位等。
常见的逻辑运算指令包括AND(与运算)、ORR(或运算)、EOR(异或运算)、LSL(逻辑左移)等。
ARM映像文件及执行机理
ARM映象文件及执行机理 ARM学习报告001 2004-5-7 这几天为了弄清楚ARM系统是如何运行相应的可执行程序可谓费尽心机,整个五一假期都没有休息,其中由于烧写flash的软件出了些问题,使得理解ARM映象文件及执行机理更加曲折,不过还好在自己的努力和论坛上兄弟的帮助下,终于还是成功了。
作为进入ARM系统设计的重要一步,我觉得这个过程是应该写下来的,既是为了自己的总结,也为了后来进入ARM的人可以少走些弯路。
我的开发板配置如下: l CPU: S3C4510B芯片(ARM7TDMI核) l FLASH:1片16×1M位数据宽度的FLASH,共2M 字节Flash(MX29LV160BTC),速度70/90ns; 16位模式。
l 内存SDRAM:2片4M ×16位数据宽度的SDRAM(HY57V651620B TC-10S)构成,共16M 字节SDRAM。
2片16位拼做32位使用,共用一个片选。
l 简易JTAG调试,两个串口,一个以太网口 从我个人的学习经过认为,初学者最难突破的应该是以下三个方面。
所以,本文基本上从这三个方面来阐述。
l ARM映象文件(包括axf文件和bin文件)的生成和组成 l 映象文件下在flash中的状态和运行时的状态(加载域和运行时域) l 地址重映射remap 本文基本围绕附录给出的那个串口发送程序MySComm4510b002.mcp而展开的。
这个程序的初始化和地址重映射部分参考了twentyone的程序(http://bbs.edw.com.cn/dispbbs.asp?boardID=20&ID=27980&page=1),串口发送部分参考了sofa的程序(那我自己写了什么呢?J)。
首先我们应该建立这样一种概念,对于一个裸机(Flash里什么都没有)来说,所有的细节都得自己设置,不要指望芯片或开发工具可以为你做些什么!所以从第一条指令开始,你就必须负责所有的工作。
arm 粘合代码 -回复
arm 粘合代码-回复如何使用ARM粘合代码概述:ARM粘合代码(ARM inline assembly)是一种在ARM汇编代码中嵌入C或C++代码的技术。
它可以允许程序员在高级语言中直接嵌入汇编代码,以实现对底层硬件的直接操作。
本文将介绍如何使用ARM粘合代码,在实际应用中发挥其强大的功能。
1. 配置开发环境:首先,确保你的开发环境中已经安装了适当的工具链。
多数ARM开发板或芯片供应商提供免费的ARM工具链,如Keil、IAR等。
选择一种你喜欢的工具链并进行安装和配置。
2. 编写C/C++代码:在开始编写ARM粘合代码之前,你需要先编写好C或C++的代码。
这些代码将会被ARM粘合代码嵌入,并与之一同编译和执行。
3. 熟悉ARM汇编语法:了解并熟悉ARM汇编语法是使用ARM粘合代码的基础。
ARM汇编语法与x86汇编语法有所不同,因此需要在使用之前进行一定的学习。
4. 插入ARM粘合代码:在你想要使用ARM粘合代码的地方插入特定的标记。
在GCC编译器中,这个标记为`__asm__`,后面跟着一对括号和引号。
在这对引号中,你可以编写如何使用ARM汇编指令来实现你的功能。
如下所示:c__asm__ ("ARM指令\n": 输出寄存器: 输入寄存器: 破坏性寄存器);在以上代码示例中,你需要将"ARM指令"替换为你想要使用的真实ARM 汇编指令。
还需指定输出寄存器、输入寄存器和破坏性寄存器的列表。
输入和输出寄存器是用来传递参数或接收返回值的,而破坏性寄存器是指那些在ARM汇编代码中会被修改的寄存器。
5. 编写ARM粘合代码:在插入标记的地方,你可以按照ARM汇编语法编写你的粘合代码。
在这些代码中,你可以使用ARM的寄存器、指令和其他特性来实现你的功能。
6. ARM粘合代码范例:以下是一个ARM粘合代码的简单范例,用来实现一个计算两个整数和的函数。
cint add(int a, int b) {int result;__asm__ ("ADD [sum], [num1], [num2] \n": [sum] "=r" (result): [num1] "r" (a), [num2] "r" (b));return result;}在这个例子中,我们使用了ARM的ADD指令来计算两个整数的和。
第11章 ARM连接器
Armlink在进行部分连接生成新的目标文件时执行下面的操作。
删除重复的调试信息段。 最小化符号表的大小。 保留那些未被解析的符号。 生成新的目标文件。
7
11.3 ARM连接器生成的符号
ARM连接器定义了一些符号,这些符号中都包含字符 $$。ARM连接器在生成映像文件时,用它们来代表映 像文件中各域的起始地址以及存储区域界限、各输出 段的起始地址以及存储区域界限、各输入段的起始地 址以及存储区域界限。比如, Load$$region_name$$Base代表域region_name加 载时的起始地址;image$$region_ name$$Base代 表域region_name运行时的起始地址。 这些符号可以被汇编程序引用,用于地址重定位。这 些符号可以被C程序作为外部符号引用。 所有这些符号,只有在其被应用程序引用时,ARM连 接器才会生成该符号。
6
11.2 ARM连接器介绍
Armlink在进行完全连接生成可执行的映像文件时执行下面的 操作。
解析输入的目标文件之间的符号引用关系。 根据输入目标文件对C/C++函数的调用关系,从C/C++运行时库中提取 相应模块。 将个输入段排序,组成相应的输出段。 删除重复的调试信息段。 根据用户指定的分组和定位信息,建立映像文件的地址映射关系。 重定位需要重定位的值。 生成可执行的映像文件。
2
11.1.1 ARM映像文件的组成
本小节介绍ARM映像文件的组成部分, 以及这些组成部分的地址映射方式。 1. ARM映像文件的组成部分 2. ARM映像文件各组成部分的地 址映射
3
11.1.2 ARM映像文件的入口点
1. ARM映像文件中的两类入口点 2. 定义初始入口点 3. 普通入口点的用法
ARM汇编语言的语法知识

• ARM汇编语言伪指令----符号定义伪操作
局部变量声明
LCLA 声明一个局部算术变量,并将其初始化为0 LCLL 声明一个局部逻辑变量,并将其初始化为{FALSE} LCLS 声明一个局部字符串,并将其初始化为NULL 使用示例: LCLA LCLL LCLS num1 logic_x string_y
ARM汇编语言的语法知识
ARM汇编语言语句格式
ARM汇编语言的语句格式:
{symbol}{instruction|directive|pseudo-instruction}{comment}
其中:
instruction为指令。在ARM汇编语言中,指令不能从一行的行头开 始.在一行语句中,指令的前面必须有空格或符号. directive为伪操作。 pseudo-instruction为伪指令。 symbol为符号。 在ARM汇编语言中,符号必须从一行的行头开始, 并且符号中不能包含空格,在指令和伪指令中符号用作地址标号,在 有些伪操作中,符号用作变量或者常量. comment为语句的注释.在 ARM 汇编语言中注释以分号”;”开头. 注释的结尾即为一行的结尾,注释也可以单独占用一行.
...
LDR ... InitStack MOV ... R0, LR 0xb4 0x84 ... DCD 0x84 R1,=InitStack 0x60 ... MOV R0, LR
编译后的反汇编代码:
...
LDR R1,0xb4
使用伪指令将程序标号 InitStack的地址存入R1
LDR伪指令被汇编成一条LDR指令, 并在文字池中定义了一个常量,该 常量为InitStack标号的地址
LDR伪指令用于加载32位的立即数或一个地址值到指定寄存器。在汇 编编译源程序时,LDR伪指令被编译器替换成一条合适的指令。若加载的 常数未超出MOV或MVN的范围,则使用MOV或MVN指令代替该LDR伪指 令,否则汇编器将常量放入文字池(即数据缓冲区),并使用一条基于PC相 对偏移的LDR指令从文字池读出该常量。 LDR伪指令格式
ARM的大端格式bigendian、小端格式littleendian和字word
ARM的⼤端格式bigendian、⼩端格式littleendian和字word
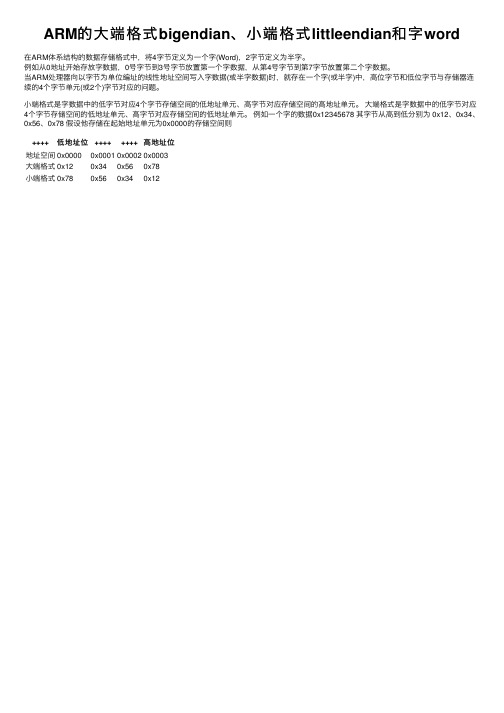
在ARM体系结构的数据存储格式中,将4字节定义为⼀个字(Word),2字节定义为半字。
例如从0地址开始存放字数据,0号字节到3号字节放置第⼀个字数据,从第4号字节到第7字节放置第⼆个字数据。
当ARM处理器向以字节为单位编址的线性地址空间写⼊字数据(或半字数据)时,就存在⼀个字(或半字)中,⾼位字节和低位字节与存储器连续的4个字节单元(或2个)字节对应的问题。
⼩端格式是字数据中的低字节对应4个字节存储空间的低地址单元、⾼字节对应存储空间的⾼地址单元。
⼤端格式是字数据中的低字节对应4个字节存储空间的低地址单元、⾼字节对应存储空间的低地址单元。
例如⼀个字的数据0x12345678 其字节从⾼到低分别为 0x12、0x34、0x56、0x78 假设他存储在起始地址单元为0x0000的存储空间则
++++低地址位++++++++⾼地址位
地址空间0x00000x00010x00020x0003
⼤端格式0x120x340x560x78
⼩端格式0x780x560x340x12。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Arm中的链接文件的规则-T选项是ld命令中比较重要的一个选项,可以用它直接指明代码的代码段、数据段、博士生、段,对于复杂的连接,可以专门写一个脚本来告诉编译器如何连接。
-Ttext addr-Tdata addr-Tbss addrarm-elf-ld -Ttext 0x00000000 -g led_On.o -o led_on_elf ,运行地址为0x00000000,由于没有data和bss,他们会默认的依次放在后面。
相同的代码不同的Ttext,你可以对比一下他们之间会变的差异,ld会自动调整跳转的地址。
*简单的Linker script(1) SECTIONS命令:The SECTIONS command tells the linker how to map input sections into output sections, and how to place the output sections in memory.命令格式如下:SECTIONS{sections-commandsections-command......}其中sections-command可以是ENTRY命令,符号赋值,输出段描述,也可以是overlay描述。
(2) 地址计数器‘.’(location counter):该符号只能用于SECTIONS命令内部,初始值为‘0’,可以对该符号进行赋值,也可以使用该符号进行计算或赋值给其他符号。
它会自动根据SECTIONS命令内部所描述的输出段的大小来计算当前的地址。
(3) 输出段描述(output section description):前面提到在SECTIONS命令中可以作输出段描述,描述的格式如下:section [address] [(type)] : [AT(lma)]{output-section-commandoutput-section-command...} [>region] [AT>lma_region] [:phdr :phdr ...] [=fillexp]很多附加选项是用不到的。
其中的output-section-command又可以是符号赋值,输入段描述,要直接包含的数据值,或者某一特定的输出段关键字。
*linker script 实例==============================OUTPUT_ARCH(arm)ENTRY(_start)SECTIONS {. = 0xa3f00000;__boot_start = .;.start ALIGN(4) : {*(.text.start)}.setup ALIGN(4) : { setup_block = .;*(.setup)setup_block_end = .; }.text ALIGN(4) : { *(.text)}.rodata ALIGN(4) : { *(.rodata)}.data ALIGN(4) : { *(.data)}.got ALIGN(4) : {*(.got)}__boot_end = .;.bss ALIGN(16) : { bss_start = .;*(.bss)*(COMMON)bss_end = .;}.comment ALIGN(16) : {*(.comment)}stack_point = __boot_start + 0x00100000;loader_size = __boot_end - __boot_start;setup_size = setup_block_end - setup_block;}=============================在SECTIONS命令中的类似于下面的描述结构就是输出段描述:.start ALIGN(4) : {*(.text.start)}.start 为output section name,ALIGN(4)返回一个基于location counter(.)的4字节对齐的地址值。
*(.text.start)是输入段描述,*为通配符,意思是把所有被链接的object文件中的.text.start段都链接进这个名为.start的输出段。
源文件中所标识的section及其属性实际上就是对输入段的描述,例如.text.start输入段在源文件start.S中的代码如下:.section .text.start.global _start_start :b startarm-elf-ld -Ttimer.lds -o timer_elf header .o这里就必须存在一个timer.lds的文件。
对于.lds文件,它定义了整个程序编译之后的连接过程,决定了一个可执行程序的各个段的存储位置。
虽然现在我还没怎么用它,但感觉还是挺重要的,有必要了解一下。
先看一下GNU官方网站上对.lds文件形式的完整描述:SECTIONS {...secname start BLOCK(align) (NOLOAD) : AT ( ldadr ){ contents } >region :phdr =fill...}secname和contents是必须的,其他的都是可选的。
下面挑几个常用的看看:1、secname:段名2、contents:决定哪些内容放在本段,可以是整个目标文件,也可以是目标文件中的某段(代码段、数据段等)3、start:本段连接(运行)的地址,如果没有使用AT(ldadr),本段存储的地址也是start。
GNU网站上说start可以用任意一种描述地址的符号来描述。
4、AT(ldadr):定义本段存储(加载)的地址。
/* nand.lds */SECTIONS {firtst 0x00000000 : { head.o init.o }second 0x30000000 : AT(4096) { main.o }}以上,head.o放在0x00000000地址开始处,init.o放在head.o后面,他们的运行地址也是0x00000000,即连接和存储地址相同(没有AT指定);main.o 放在4096(0x1000,是AT指定的,存储地址)开始处,但是它的运行地址在0x30000000,运行之前需要从0x1000(加载处)复制到0x30000000(运行处),此过程也就用到了读取Nand flash。
这就是存储地址和连接(运行)地址的不同,称为加载时域和运行时域,可以在.lds连接脚本文件中分别指定。
编写好的.lds文件,在用arm-linux-ld连接命令时带-Tfilename来调用执行,如arm-linux-ld ?Tnand.lds x.o y.o ?o xy.o。
也用-Ttext参数直接指定连接地址,如arm-linux-ld ?Ttext 0x30000000 x.o y.o ?o xy.o。
既然程序有了两种地址,就涉及到一些跳转指令的区别,这里正好写下来,以后万一忘记了也可查看,以前不少东西没记下来现在忘得差不多了。
ARM汇编中,常有两种跳转方法:b跳转指令、ldr指令向PC赋值。
我自己经过归纳如下:b step1 :b跳转指令是相对跳转,依赖当前PC的值,偏移量是通过该指令本身的bit[23:0]算出来的,这使得使用b指令的程序不依赖于要跳到的代码的位置,只看指令本身。
ldr pc, =step1 :该指令是从内存中的某个位置(step1)读出数据并赋给PC,同样依赖当前PC的值,但是偏移量是那个位置(step1)的连接地址(运行时的地址),所以可以用它实现从Flash到RAM的程序跳转。
此外,有必要回味一下adr伪指令,U-boot中那段relocate代码就是通过adr实现当前程序是在RAM中还是flash中。
仍然用我当时的注释adr r0, _start /* r0是代码的当前位置 *//* adr伪指令,汇编器自动通过当前PC的值算出如果执行到_start时PC 的值,放到r0中:当此段在flash中执行时r0 = _start = 0;当此段在RAM中执行时_start= _TEXT_BASE(在board/smdk2410/config.mk中指定的值为0x33F80000,即u-boot在把代码拷贝到RAM中去执行的代码段的开始) */ldr r1,UGG BOOTS, _TEXT_BASE /* 测试判断是从Flash启动,还是RAM *//* 此句执行的结果r1始终是0x33FF80000,因为此值是又编译器指定的(ads中设置,或-D设置编译器参数) */cmp r0, r1 /* 比较r0和r1,调试的时候不要执行重定位 */下面,结合u-boot.lds看看一个正式的连接脚本文件。
这个文件的基本功能还能看明白,虽然上面分析了好多,但其中那些GNU风格的符号还是着实让我感到迷惑。
OUTPUT_FORMAT("elf32littlearm", "elf32littlearm", "elf32littlearm");指定输出可执行文件是elf格式,32位ARM指令,小端OUTPUT_ARCH(arm);指定输出可执行文件的平台为ARMENTRY(_start);指定输出可执行文件的起始代码段为_start.SECTIONS{. = 0x00000000 ; 从0x0位置开始. = ALIGN(4) ; 代码以4字节对齐.text : ;指定代码段{cpu/arm920t/start.o (.text) ; 代码的第一个代码部分*(.text) ;其它代码部分}. = ALIGN(4).rodata : { *(.rodata) } ;指定只读数据段. = ALIGN(4);.data : { *(.data) } ;指定读/写数据段. = ALIGN(4);.got : { *(.got) } ;指定got段, got段式是uboot自定义的一个段, 非标准段__u_boot_cmd_start = . ;把__u_boot_cmd_start赋值为当前位置, 即起始位置.u_boot_cmd : { *(.u_boot_cmd) } ;指定u_boot_cmd段, uboot把所有的uboot命令放在该段.__u_boot_cmd_end = .;把__u_boot_cmd_end赋值为当前位置,即结束位置. = ALIGN(4);__bss_start = .; 把__bss_start赋值为当前位置,即bss段的开始位置.bss : { *(.bss) }; 指定bss段_end = .; 把_end赋值为当前位置,即bss段的结束位置}请问这个从load address 到running address的加载过程是谁来完成呢,是不是bootloader(stage 1)根据相应的地址来完成这个加载过程呢?Blog作者的回复:是的你好:读了你的文章,很受启发。