锁模原理
第28讲锁模原理主动锁模技术
5
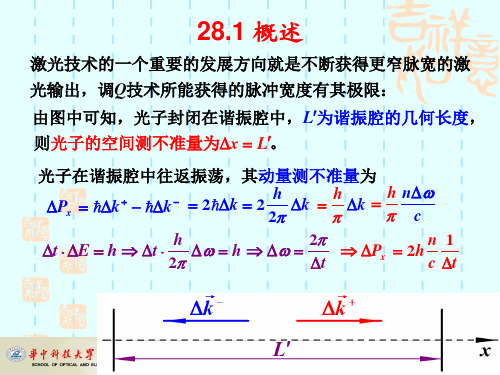
28.1 概述
二、超短脉冲特性
高时间分辨率:超短脉冲的脉宽在ps、fs甚至更短,能够作 为测量固体物理、化学、生物材料等领域超快物理过程 的测量工具。
高空间分辨率:超短光脉冲空间长度是脉冲宽度与光速的乘 积,随着光脉宽的缩短,其空间长度也不断缩短,已经达 到微米量级,这在显微成象方面有很大用途。
例如:钕玻璃介质,锁模可以得到PS量级的超短脉冲, 而对于He Ne激光器,,不能获得小于1ns的脉冲。
根据采用的锁模方法不同,可以分为主动锁模、被动 锁模、自锁模、同步泵浦锁模等等。
24
28.4 声光驻波场振幅调制主动锁模
一、原理
高带宽:光脉冲的脉宽和其带宽乘积为相同数量级,脉宽缩 短,则带宽增加。100 fs的脉冲宽度其带宽达到了10THz,最 短的可见光波段超短激光脉冲的带宽已经包含了大部分可 见光光谱区,看起来象白光一样。高带宽在光通信方面非 常重要。
6
28.1 概述
高功率激光:激光器输出功率提升意味着体积的增加,也意 味着费用的增长, fs技术可以用中等输出能量的激光器产 生有极高峰值功率激光输出,目前已达到1015W 量级的峰值 功率和1020W / cm2的光强。
光学频率起伏与“跳模”等。
4、各纵模非相干叠加: d dt
q1
t
d t
dt
const .
9
28.2自由运转多纵模激光器
以上各点互相关联,由于色散造成的 q
和各纵模初始
m
相位随机分布造成了 t 的随机分布, 最终造成输出的光场
在时域随时间做无规则起伏,属于非相干叠加,没有干涉项,
为非同步辐射。
在通常条件下,多纵模自由运转激光器的输出光强为各纵模 光强的之和,是各纵模光电场无规则,非相干叠加的结果。
可饱和吸收体锁模原理

可饱和吸收体锁模原理
可饱和吸收体锁模原理是一种基于量子阱材料的锁模技术,该技术利用了量子限制效应,通过改变材料表面的光吸收特性和光折射率来完成激光锁定。
以下是该原理的详细解释:可饱和吸收体是一种特殊的材料,其吸收特性随着光强的变化而改变。
在弱光照射下,可饱和吸收体会吸收大部分光线,使得激光无法形成。
然而,当光强增加到一定程度时,可饱和吸收体达到饱和状态,其吸收系数降低,使得激光能够通过并形成稳定的脉冲。
在激光器中,可饱和吸收体被放置在激光腔内,当激光在腔内来回反射时,会多次通过可饱和吸收体。
这样,强脉冲部分由于能量较高,更容易使可饱和吸收体达到饱和状态,从而更容易通过并形成稳定的脉冲。
而弱脉冲部分则会被吸收体吸收,逐渐消失。
通过调节可饱和吸收体的参数和激光器的腔长等参数,可以实现对激光脉冲的精确控制。
这种锁模技术具有高效率、稳定性和可靠性等优点,被广泛应用于超快激光领域。
模具锁模扣工作原理

模具锁模扣工作原理模具锁模扣是一种常见的用于模具锁模的装置,其工作原理是通过锁紧和释放的动作来固定和松开模具。
模具锁模扣通常由几个部件组成,包括锁模块、锁模座、锁模杆和锁模板等。
这些部件通过相互配合,实现了模具的稳固锁定和解锁。
在模具的使用过程中,为了保证产品的质量和生产效率,需要确保模具的稳定性和准确性。
而模具锁模扣就起到了固定模具的作用,使得模具在生产过程中保持稳定的位置,避免模具的偏移和变形,从而保证产品的精度和一致性。
同时,模具锁模扣还可以提高生产效率,减少生产中的故障和停工时间。
模具锁模扣的工作原理可以简单描述为以下几个步骤:1. 锁模动作:在模具使用前,先将模具座安装在机械设备上,并将模具放置在模具座上。
然后将锁模块安装在模具座上,并通过螺纹或销钉等方式固定在模具座上。
锁模杆与锁模板相连,通过锁定装置固定在模具上方。
当需要锁定模具时,通过操作锁定装置,使锁模杆向下运动,锁定模具。
锁定装置通常采用螺纹或液压系统,通过控制开关或手柄来实现锁定动作。
2. 释放动作:在模具使用结束后,需要将模具解锁并取出。
通过操作解锁装置,使锁模杆向上运动,解除锁定。
解锁装置通常与锁定装置相反,可以是螺纹杆的反向旋转或液压系统的释放,以实现解锁动作。
解锁后,模具可以被轻松地取出或更换。
3. 调整和维护:在使用模具锁模扣时,还需要进行一些调整和维护工作,以确保其正常运行。
例如,需要定期检查锁模块和锁模座之间的配合精度,确保其紧密连接,避免松动或卡滞。
同时,需要保持锁模杆的清洁和润滑,以减少摩擦和磨损,延长使用寿命。
模具锁模扣的工作原理可以说是简单而有效的。
通过锁定和解锁动作,模具可以牢固地固定在模具座上,并在需要时方便地取下。
这种装置不仅提高了模具的稳定性和准确性,还可以提高生产效率和产品质量。
因此,在模具制造和使用过程中,模具锁模扣是一个不可或缺的重要部件。
模具锁模扣通过锁定和解锁的动作,实现了对模具的固定和释放。
二板注塑机锁模原理
二板注塑机锁模原理您知道吗,二板注塑机锁模这事儿可有意思啦!咱先来说说为啥要有锁模这一步。
您想啊,注塑的时候那可是要把塑料液体往模具里灌,如果模具没锁好,那还不得乱流,做出的东西不就歪七扭八,完全没法用啦!所以锁模就像是给模具上了一把牢固的大锁,让塑料液体乖乖听话,按照咱们想要的样子成型。
二板注塑机锁模的原理呢,其实就像是一场精彩的“力量对决”。
它主要靠的是两个大家伙——动模板和定模板。
这俩板子可厉害了,它们就像是一对配合默契的好伙伴。
当要开始锁模的时候,那动力系统就开始发力啦!就像大力士在后面使劲推一样,推动动模板朝着定模板快速前进。
这速度,那叫一个快!然后呢,动模板就紧紧地贴到了定模板上,一点儿缝隙都不给留。
这时候,可还不算完。
还有一些特别的装置和结构发挥作用呢。
比如说,会有一些锁模油缸或者机械锁模机构,它们就像是超级大力士的“帮手”,一起用力把动模板和定模板死死地锁住。
您可能会想,这得用多大的力气啊?嘿这力气可不小,得足够抵抗住注塑过程中塑料液体带来的强大压力。
不然的话,模具一撑开,那可就全乱套啦!而且啊,在整个锁模的过程中,还有很多精密的控制系统在工作呢。
它们就像是聪明的小脑袋,时刻监测着各种参数,比如压力、位置啥的,确保锁模的过程准确无误,万无一失。
想象一下,这二板注塑机就像是一个超级厉害的“变形金刚”,在锁模的时候,各个部件都协同作战,展现出强大的力量和精准的控制,是不是特别酷?再跟您说个有趣的,这锁模的过程有时候就像是一场紧张刺激的比赛。
各个部件都在争分夺秒,又要快又要准,一旦成功锁住,就好像赢得了一场重要的胜利,为接下来注塑出完美的产品打下了坚实的基础。
第六讲激光锁模技术
11 2N1 q
可见增益线宽愈宽,愈可能得到窄的
锁模脉宽。( t=to=0时,A(t)有极大值,而上式分子(1/2) (2N+1) △ wt1=时,
A(t)=0,令 △t=t1-t0 并近似为半峰值宽,则有…)
(3)输出脉冲的峰值功率正比于 E02 (2N 1)2,因此,由于锁模,峰值
功率增大了2N+1倍。
本节将讨论超短脉冲激光器的原理、特点、实现的方法,几种典 型的锁模激光器及有关的超短脉冲技术。
6.2 锁模的基本理论
激光器的模式分为纵模和横模。锁模也分为锁纵模、锁横 模、锁纵横模三种。本节介绍纵模锁定。
一、多模激光器的输出特性
为了更好地理解锁模的原理,先讨论未经锁摸的多纵模自由运转
激光器的输出特性。腔长为L的激光器,其纵模的频率间隔为:
Δω ,假定第q个振荡模为
E t E cos t E cos qt q
q
0
q
q
0
0
式中,q为腔内振荡纵模的序数。
激光输出频谱
ω-5
ω-1ω0ω1 ω
ω5
N=5, 2N+1=11
激光器输出总光场是2N+1个纵模相干的结果:
N
N
E(t) Eq (t) E0 cos(0 q)t qa
出现了极大值( I = E2 = 9E02 )。当然, 对于谐振腔内存在多个纵模 的情况,同样有类似的结果。
E(t)
E0
1
0
2
-E0
3
I(t)
v3 9E02
v3=3v1,
v2
v1
v2=2v1, 初位相相同(0)
9E02
0
E(t)
激光锁模技术ppt课件
冲在腔内往返运动,每当此脉冲行进到输出反射镜时,便有一
个锁模脉冲输出。
➢脉冲宽度,即脉冲峰值与第一个光强为零的谷值间的时间间隔
sin[(2N 1) t ] 0但sin(t ) 0 t (m n )
2
2
2
2N 1
2 T 1
为锁模激光器的线宽
(2N 1) 2N 1
4.7.1 锁模原理
,
所以
(t1) (t1
2L) c
,以后这束光波每次通过调制器时损耗
相同。若损耗大于增益,这部分光波终将消失,而在损耗等于
零时通过的光每次都能无损耗的通过,会不断被放大,满足阈
值条件形成振荡,如果腔内损耗和增益控制得当,最终将形成
脉宽很窄,周期为T的脉冲序列输出。
损耗内调制锁模
➢从频率域模式耦合的角度来说明损耗调制锁模的原理。假设中心 频率 ν0 处的模首先振荡,其振幅调制后的电矢量为:
彼此独立的、随机的,所以总光场是各个模式光场的非相
干叠加。输出总光强是各个振荡模式光强之和,即 I Iq
输出光强随时间无规则起伏。
q
4.7.1 锁模原理
核心思想:锁模技术让谐振腔中存在的纵模同步振荡,让各模的频率 间隔保持相等并使各模的初位相保持为常数,激光器输出在时间上有 规则的等间隔的短脉冲序列。
实现锁模的方法
在一般激光器中,各纵模振荡互不相关,各纵模 相位没有确定的关系。并且,由于频率牵引效应, 相邻纵模的频率间隔并不严格相等。因此为了得到 锁模超短脉冲,须采取措施强制各纵模初位相保持 确定关系,并使相邻模频率间隔相等。
• 主动锁模 • 被动锁模 • 自锁模
4.7.2 主动锁模
在自由运转的激光器谐振腔中加入受外界信号控制的调制器, 对激光输出进行振幅或相位调制,实现各个纵模振动同步,叫 作主动锁模。 1. 振幅调制(损耗内调制锁模) ➢如图(4-31)所示,在谐振腔中插入一个电光或声光损耗调制器。 设调制周期为 Tm 2 Ω 2L c ,调制频率 νm c 2L (恰为纵 模频率间隔)
主动锁模原理
主动锁模原理
主动锁模原理是指在注塑成型过程中,通过模具自身的力量来保持模具的闭合状态,从而实现注塑成型的过程。
这种原理的应用,可以有效地提高注塑成型的效率和质量,同时也可以减少模具的损耗和维护成本。
在注塑成型过程中,模具的闭合状态是非常重要的。
如果模具没有完全闭合,注塑过程中就会出现漏料、气泡等问题,从而影响成型质量。
而传统的模具闭合方式是通过液压或机械力来实现的,这种方式需要消耗大量的能量和成本,同时也容易出现故障和损坏。
而主动锁模原理则是通过模具自身的力量来保持模具的闭合状态。
具体来说,就是在模具的设计中,通过设置一些特殊的结构和装置,使得模具在注塑过程中可以自动锁定,从而保持闭合状态。
这种方式不仅可以减少能量和成本的消耗,还可以提高注塑成型的效率和质量。
主动锁模原理的应用范围非常广泛,可以用于各种注塑成型设备和模具。
在实际应用中,需要根据具体的注塑工艺和模具结构来进行设计和调整,以达到最佳的效果。
同时,还需要注意模具的维护和保养,及时检查和更换损坏的部件,以保证模具的正常运行和使用寿命。
主动锁模原理是一种非常有效的注塑成型技术,可以提高生产效率
和产品质量,同时也可以减少成本和维护成本。
在未来的发展中,这种技术将会得到更广泛的应用和推广,为注塑行业的发展带来更多的机遇和挑战。
注塑机锁模机构的原理
注塑机锁模机构的原理
注塑机锁模机构是注塑机的关键部件,用于固定和锁定注塑模具。
它的主要原理是通过机械力或液压力将模具的两个或多个部分,即模具的活动板和固定板,紧密地固定在一起。
注塑机锁模机构的常见原理包括:
1. 机械式锁模机构:机械式锁模机构通常由锁模杆和锁模板组成。
通过旋转或移动锁模杆,使锁模板固定或释放模具。
这种机械式原理适用于较小的注塑机。
2. 液压式锁模机构:液压式锁模机构通过液压缸产生的液压力来锁定和释放模具。
液压锁模机构通过控制液压活塞的运动,实现模具的固定和释放。
这种原理适用于大型注塑机。
无论是机械式还是液压式锁模机构,都需要确保模具的固定和释放具有足够的力量,并且能够确保模具的相对位置的准确性。
锁模机构通常还配备了安全装置,以保证在模具未完全固定或释放时防止误操作。
总的来说,注塑机锁模机构的原理是通过机械力或液压力将模具的活动和固定部分紧密固定在一起,从而保证注塑过程中模具的稳定性和准确性。
锁模原理
0
2π π
a
N sin Na N2 cos Na = P lim = P lim = N2P 0 0 0 a→0 a→0 sin a cos a
(N=4)
2、重复周期与重复频率 、
(1)重复周期 重复周期
2L′ T= c
光在腔内往返一周所用时间
(2)重复频率 重复频率 证 a1=t1+α
f =
c = νq 2L′
sin 2 ( Na ) 2 P=P 0 sin 2 ( a ) 2
P
sin2 ( Na ) 2 sin( Na ) cos( Na )( N ) 2 2 2 2 Pm = lim P0 = P0 lim a→0 a→0 2 sin( a ) cos( a )( 1 ) sin2 ( a ) 2 2 2 2
3 πlU0neγ 33 M= :调相系数 调相系数 λd
③调制结果,使中心纵模产生初位相一样、频率 调制结果,使中心纵模产生初位相一样、 为ω0±的两个边模
E(t) = E0cos[(ω0t +0 ) + M cos t]
ω
ω0- ω0 ω0+ = E0cos(ω0t +0 ) cos(M cos t) - E0sin( ω0t +0 ) sin( M cos t)
(4)调制曲线 调制曲线
U(t),n(t), (t) t ω(t) ω t I(t) t
0
L′ c 2L′ c
U(t):驱动电光器件的 驱动电光器件的 调制电信号 n(t)、 电光效 、(t):电光效 应引起折射率变化 和相移的波形 ω(t):光的频移波形 ω 光的频移波形
I(t):锁模激光输出波形 锁模激光输出波形
压铸机锁模工作原理
压铸机锁模工作原理压铸机是一种常用于制造金属零件的设备,而锁模是压铸机中的一个重要部件。
锁模的作用是在压铸过程中固定模具,确保金属材料能够被准确注入并形成所需的零件。
本文将详细介绍压铸机锁模的工作原理。
一、锁模的基本结构锁模由上模板、下模板、活动模板和锁模机构组成。
上模板和下模板分别安装在压铸机的上下部分,活动模板则位于两者之间。
锁模机构包括锁模杆、锁模板、锁模销等部件,用于固定模具。
二、锁模的工作过程1. 开模阶段在压铸过程开始之前,首先需要将模具打开,这个过程称为开模阶段。
开模时,压铸机的液压系统会提供足够的力量,使锁模机构松开,将上模板和下模板分离。
同时,活动模板也会随之移动,使模具完全打开。
2. 合模阶段当模具完全打开后,金属材料将被放置在下模板上。
接下来,压铸机的液压系统会逐渐施加压力,使锁模机构开始工作。
锁模机构会通过锁模杆、锁模板和锁模销等部件,将上模板和下模板紧密地固定在一起。
3. 注射阶段在模具完全闭合后,压铸机的注射系统会开始工作。
金属材料将通过喷嘴注入模具中,填充整个模腔。
注射过程中,锁模的作用是确保模具保持稳定,不会因注射压力而发生位移或变形。
4. 冷却阶段当金属材料注入完毕后,需要进行冷却,使其凝固成型。
在冷却阶段,锁模的作用是保持模具的稳定性,防止因温度变化而引起的变形或损坏。
5. 开模取件阶段当金属材料完全凝固后,模具将会被打开,取出成品零件。
在开模取件阶段,锁模机构会再次松开,使上模板和下模板分离,活动模板移动,方便取出成品。
三、锁模的重要性锁模在压铸机中起到了至关重要的作用。
它能够确保模具在整个压铸过程中保持稳定,避免模具的位移或变形,从而保证成品的质量和精度。
同时,锁模还能够提高生产效率,减少生产中的故障和损失。
总结:压铸机锁模工作原理是通过锁模机构将上模板和下模板固定在一起,确保模具在压铸过程中的稳定性。
锁模的工作过程包括开模阶段、合模阶段、注射阶段、冷却阶段和开模取件阶段。
锁模的原理

锁模的原理
锁模是注塑模具中非常重要的一部分,它的作用是在注塑成型过程中固定模具
的上下板,使得模具在注射压力的作用下能够保持稳定,确保成型产品的质量。
锁模系统通常由锁模机构、导柱、导套、模板、模板支座等部分组成。
下面我们将详细介绍锁模的原理。
首先,锁模机构是锁模系统的核心部分。
它通过机械传动装置,将模具的上下
板牢固地固定在一起,以抵抗注射压力对模具的挤压力,确保模具在成型过程中不会发生位移或变形。
锁模机构通常包括锁模板、活动模板、定位销、锁模杆等零部件,通过这些零部件的配合运动,实现模具的开合和锁紧。
其次,导柱和导套也是锁模系统中不可或缺的部分。
它们的作用是使模具的上
下板在成型过程中能够保持垂直运动,避免因为模具上下板的不平行而导致模具的卡滞或变形。
导柱和导套通常采用高精度的配合,以确保模具在成型过程中能够保持稳定的运动轨迹。
此外,模板和模板支座也是锁模系统中的重要组成部分。
模板是模具的上下板,它直接承受注射压力和模具的开合力,因此需要具有足够的强度和刚度。
模板支座则是支撑模板的零部件,它通过螺栓或其他连接方式将模板固定在模具机身上,以确保模具在成型过程中不会发生松动或位移。
总的来说,锁模的原理是通过锁模机构、导柱、导套、模板和模板支座等部分
的配合运动,使得模具在注射成型过程中能够保持稳定的运动轨迹和固定的位置,确保成型产品的质量。
只有锁模系统运行正常,才能保证模具的使用寿命和成型产品的质量。
因此,在模具设计和制造过程中,锁模系统的设计和选择至关重要,需要充分考虑模具的结构和成型工艺,以确保锁模系统的可靠性和稳定性。
三板注塑机锁模原理

三板注塑机锁模原理三板注塑机是一种常见的注塑机型号,其锁模原理是其工作过程中的一个重要环节。
本文将从三板注塑机的结构和工作原理两个方面,详细介绍三板注塑机的锁模原理。
一、结构三板注塑机主要由注射系统、锁模系统、液压系统、电气系统和加热/冷却系统组成。
其中,锁模系统是三板注塑机的核心部分,它由模板、模板固定机构、模板滑动机构和模板开合机构组成。
1. 模板模板是三板注塑机上用来安装模具的部件,通常由上模板和下模板组成。
上模板用于安装上模具,下模板用于安装下模具。
模板一般由坚固的钢材制成,以确保模具的稳定性和刚性。
2. 模板固定机构模板固定机构用于将模板牢固地固定在注塑机的机架上,以防止模板在注射过程中发生移动。
常见的模板固定机构有螺杆和螺母、液压锁紧系统等。
3. 模板滑动机构模板滑动机构用于实现模板的开合运动,以便于模具的装卸和产品的取出。
常见的模板滑动机构有导柱和导套、液压缸等。
4. 模板开合机构模板开合机构用于实现模板的开合动作,以确保模具在注塑过程中能够正常工作。
常见的模板开合机构有液压开合机构、机械开合机构等。
二、工作原理三板注塑机的锁模原理是通过模板固定机构、模板滑动机构和模板开合机构的配合运动,实现模板的固定和开合。
1. 模板固定在注塑机开始工作之前,需要将上模板和下模板分别固定在机架上。
这时,模板固定机构会将模板牢固地锁定在机架上,以确保模具在注射过程中不会发生移动。
2. 模板开合当注塑机开始注射塑料时,需要将模板打开,以便于将塑料注入模具中。
这时,模板开合机构会使模板分别向上和向下运动,从而实现模板的开合动作。
3. 模板滑动在模板开合的过程中,模板滑动机构会使模板在导柱或导套的引导下进行滑动。
这样,模具就可以顺利地装卸和产品可以方便地取出。
通过上述的锁模原理,三板注塑机可以实现模具的固定和开合,从而使注塑过程更加稳定和高效。
同时,模板滑动机构的运动也方便了模具的装卸和产品的取出,提高了生产效率。
锁模的原理方法及应用

锁模的原理方法及应用1. 概述锁模是一种工业生产中常用的技术,它用于确保模具在注塑过程中的稳定性和精度。
本文将介绍锁模的原理、方法和应用,并给出一些实际案例,以帮助读者更好地理解锁模的重要性和应用场景。
2. 锁模的原理锁模是指通过一定的机械手段将模具保持在预定的位置上,以确保注塑过程中模具的稳定性。
其原理可以归纳为以下几个方面:•摩擦力:通过增加模具之间的摩擦阻力,防止模具在注塑过程中发生位移或变形。
•弹簧力:通过使用弹簧等弹性元件,将模具保持在稳定位置上。
•液压力:利用液压系统提供的油压力来锁定模具,确保其稳定性。
•周向力:通过在模具的边缘设置周向力,使模具保持稳定。
3. 锁模的方法锁模可以通过多种方式实现,下面介绍几种常见的锁模方法:3.1 机械锁模机械锁模是一种常见的锁模方式,它通过机械装置将模具保持在位,以确保模具的稳定性和精度。
常见的机械锁模机构包括顶杆式锁模、侧板式锁模和斜销式锁模等。
3.2 液压锁模液压锁模是一种利用液压系统来锁定模具的方式。
通过控制油压力,可以实现对模具的精确控制,使其保持在预定位置上。
液压锁模可以适应更复杂的模具形状,并提供高度的精度和稳定性。
3.3 气动锁模气动锁模是一种利用气动系统来锁定模具的方式。
它通常用于较小型的模具,具有简单的操作和较低的成本。
然而,与液压锁模相比,气动锁模在控制精度和稳定性方面稍逊一筹。
3.4 电子锁模电子锁模是一种利用电子控制系统来锁定模具的方式。
它通常与其他锁模方法结合使用,以提供更高的精度和稳定性。
电子锁模的优点是可以实现远程控制和自动化操作,提高工作效率。
4. 锁模的应用锁模技术在许多工业领域中都具有广泛的应用。
以下列举几个常见的应用场景:4.1 注塑成型锁模技术在注塑成型过程中起着关键作用。
通过锁定模具,可以确保塑料在注塑过程中的形状和尺寸的稳定性。
锁模还能提高成型的精度和产品质量。
4.2 压铸成型在压铸过程中,锁模技术用于确保模具在注入液态金属时的稳定性。
sesam锁模原理

sesam锁模原理小伙伴们!今天咱们来唠唠sesam锁模这个超有趣的事儿。
你知道吗?sesam锁模就像是一场超级有秩序的小粒子派对。
sesam啊,全称是半导体可饱和吸收镜。
这东西可神奇了呢。
想象一下,在一个小小的微观世界里,有好多好多的光粒子在跑来跑去。
在这个微观的光学世界里,光的行为有时候就像调皮的小孩子。
正常情况下,光的传播啊,就有点乱糟糟的。
但是sesam出现了,它就像一个超级严格又很有智慧的派对管理员。
当光线打到sesam上的时候,它里面的半导体材料就开始发挥作用啦。
这个半导体材料有个很特别的性质,就是可饱和吸收。
啥叫可饱和吸收呢?就好比有一个小房子,一开始只能住几个小光粒子,当来的光粒子太多的时候,这个小房子突然就变宽容了,能让好多好多光粒子一下子都进去了。
这个时候啊,那些被允许大量进入的光就开始变得很不一样了。
sesam对于不同强度的光有着不同的态度。
那些比较弱的光呢,sesam就有点爱答不理的,就像我们对待那些不太重要的小事情一样。
可是一旦强光来了,sesam就像被点燃了热情一样,对强光特别“热情好客”。
这种对强光和弱光的不同对待,就使得光的能量开始重新分配了呢。
光在通过sesam的时候,就像是一群小动物在过一个特殊的关卡。
弱光可能就被挡了一下,或者被吸收得比较多,而强光就顺利地通过,而且还变得更加整齐有序了。
这种整齐有序可不是小事哦,它就像是把一群乱跑的小绵羊变成了一支训练有素的小军队。
而且啊,sesam锁模还和光的频率有关呢。
就像我们听音乐有不同的音符频率一样,光也有自己的频率。
sesam就像是一个调音师,它可以让那些符合特定频率的光更好地通过,并且让它们在时间和空间上变得更加有规律。
你看啊,在激光器里,要是没有sesam锁模,光就像一群没有指挥的小乐队成员,各自为政,发出的光也是乱乱的。
但是有了sesam,就好像来了一个超级厉害的指挥家。
这个指挥家让所有的光粒子按照特定的节奏和旋律跳动。
激光器锁模的工作原理
激光器锁模的工作原理
激光器锁模是指在激光器中通过一定的控制方法,使其输出激光波长单一、线宽窄、光能稳定的特殊工作状态。
因此,激光器锁模是一种对于一般激光器性能更高的技术。
激光器的发射是通过激发激光材料中的电子使之跃迁而形成,其发射波长相对单一,但线宽相对较宽,正常情况下,一个激光器的输出往往具有多个模式,这些模式的波长并不相同,同时线宽也存在差异。
如果将这些模式输出,将会影响到激光器的使用效果与信号传输质量。
因此,锁模技术可以使激光器的性能得到提升。
激光器锁模的实现需要通过某种方法使激光器只输出一个特定波长的光,也就是只输出一个模式,即所谓“锁定模式”。
一般来说,这种锁模是基于共振腔模式的锁模技术实现的。
共振腔模式锁模通过在激光器的两端加上反射器形成一个共振腔,将激光器中的多个谐振模式限制在共振腔内并强迫它们保持同一相位,在一定条件下可以使一个谐振模式成为优先输出的模式,从而实现锁模。
同时,激光器工作的稳定性也是锁模技术的关键问题之一,因为在工作过程中激光波长的波动会导致模式的切换,甚至出现模式竞争。
要稳定输出模式,需要通过对激光器中的温度、抽运泵浦功率、电流等参数的精确控制实现。
被动锁模技术的原理与应用
被动锁模技术的原理与应用1. 背景介绍被动锁模技术是一种在模具上应用的锁模装置技术。
传统的模具锁模装置多采用机械方式,需要使用大量的气动元件,同步要求高,造价高昂。
而被动锁模技术通过引入形状记忆合金材料,可以实现简单的结构、高精度的锁模功能,减少零部件,提高模具的可靠性和精度。
2. 原理和工作方式被动锁模技术的核心原理是利用形状记忆合金(SMA)材料的热机械性能。
通常被使用的SMA材料是一个由镍和钛组成的合金,具有独特的形状记忆效应和超弹性。
被动锁模技术的工作方式分为两种情况:2.1 温度控制型被动锁模技术在温度控制型被动锁模技术中,通过改变形状记忆合金的温度,实现锁模装置的切换。
当SMA材料处于低温状态时,具有良好的弹性和可塑性,此时模具可以进行开模操作;当SMA材料受到加热,温度升高时,SMA材料将发生形状记忆效应,自动变形到预设形状,锁定模具,实现锁模操作。
2.2 电流控制型被动锁模技术电流控制型被动锁模技术通过施加电流控制SMA材料的相变过程,从而实现锁模和解锁模动作。
当施加电流时,SMA材料会发生相变,从超弹性状态变成具有形状记忆效应的状态,实现锁模;当去除电流时,SMA材料恢复到超弹性状态,模具解锁。
3. 被动锁模技术的优势相比传统的机械式锁模装置,被动锁模技术具有如下优势:•简单结构:被动锁模技术不需要使用复杂的零部件,大大减少了模具的组装难度和加工成本。
•高精度:被动锁模技术通过形状记忆合金的精确变形,实现高精度的锁模和解锁模动作,提高了模具的制造精度和生产效率。
•可靠性:被动锁模技术在锁模和解锁过程中无需完成复杂的机械传动,减少了机械部件的磨损和故障风险,提高了模具的可靠性和使用寿命。
4. 应用领域被动锁模技术在模具制造领域具有广泛的应用前景,特别适用于以下场景:•塑料注塑模具:被动锁模技术可以实现快速的锁模和解锁过程,提高了塑料注塑模具的生产效率。
•压铸模具:被动锁模技术可以减少模具的零部件,提高模具的精度和可靠性,适用于高要求的压铸产品生产。
三板注塑机锁模原理
三板注塑机锁模原理1. 基本概述三板注塑机是一种用于制造塑料制品的机械设备,通过将熔融的塑料注入模具中,使其冷却固化后得到所需形状的产品。
在注塑过程中,模具的锁模是一个非常重要的步骤,它保证了注塑机能够正确地封闭和固定模具,以确保产品质量和生产效率。
锁模原理是指在注塑机工作过程中,通过一系列的动作来实现模具的封闭和开启。
这些动作包括:合模(Closing),保压(Clamping),开模(Opening)和脱模(Ejection)等。
2. 锁模系统组成锁模系统由以下几个部分组成:•锁模装置:用于将活动模板与固定模板连接在一起。
•液压系统:提供力量来驱动锁模装置进行开合操作。
•控制系统:控制液压系统和其他配件以实现锁模操作。
•安全装置:用于保护操作人员和设备安全。
3. 锁模原理详解3.1 合模过程合模过程是指将活动模板与固定模板连接在一起,形成一个封闭的模腔,以便进行注塑操作。
合模过程包括以下几个步骤:1.活动模板移动:液压缸通过液压系统提供的力量,将活动模板向固定模板方向移动。
2.模具对位:当活动模板接近固定模板时,通过锁紧机构将两个模板对位并保持稳定。
3.锁紧:当活动模板完全与固定模板接触时,通过液压缸施加足够的力量将两个模板紧密地锁定在一起。
合模过程中的关键是保证活动模板与固定模板之间的密封性和稳定性,以确保注塑过程中不会有漏料和变形等问题。
3.2 保压过程保压过程是指在注塑完成后,继续施加一定的压力使产品冷却固化。
保压过程包括以下几个步骤:1.注塑完成:熔融的塑料被注入到封闭的模腔中,并填充到所需的形状。
2.压力施加:通过液压系统提供的力量,在活动模板和固定模板之间施加一定的压力,以确保产品充分冷却和固化。
保压过程中的关键是保持一定的压力和时间,以确保产品质量符合要求。
3.3 开模过程开模过程是指在注塑完成并产品冷却固化后,将活动模板与固定模板分离,取出成品。
开模过程包括以下几个步骤:1.释放压力:通过液压系统释放施加在活动模板和固定模板之间的压力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2、振幅(损耗)调制锁模:声光锁模 (1)概念
使用声光调制器调制谐振腔损耗,当电调制频率 为f=c/4L时,损耗调制频率为f=c/2L,可获重复 频率也为f的激光脉冲系列
(2)装置 激光
输出镜
激光介质 声光器件 全反镜
P0
1 2
STI
0
1 2
1
0.01150
0.75w
P q P0 10 0.75 7.5w
③ Pm=N2P0=1000.75=75w
T
2L c
2 1.5 3108
108 s
T 108 109s N 10
或
1
T
1 950 106
1.05109 s
§2 锁模激光器
一、主动式锁模
1、定义
T 2 2L 2L c c
3、脉宽(光脉冲持续时间的一半)
证
a2
a1
2
N
2 T
N N
T 1 N T
另有
N T q
T 1
q
1 q 1 q T T
1
2
3
4
5
6
7
8
9
123456789
(N=4)
例1 He-Ne激光器的谐振腔长L=1.5m, 截面积S=1 mm2,输出镜透过率为T=0.01, 激活介质的多普勒 线宽为=950MHz, 饱和参数为Is=50 w/mm2,现将此 激光器激活,激发参数=2,求:①满足起振条件的 模式数②总输出功率(无模式竞争,各模式输出功
eina[1 eia(2n1) ]
e
i
a 2
[e
-ina
ei(n1)a
]
E0
1 eia
E0
e
i
a 2
(1
eia
)
-i(n
1 2
)a
E e e ee 0
i
a 2
i(n
1 2
)a
i
a 2
E0
sin
n
1 2
sin
a 2
a
E0
sin sin
Na 2
a 2
输出功率
P(t)
E(t) 2
(3)时域原理
①外加电调制信号
U (t)
U0
sin
1 2
t
2f c
L
U0:调制电压幅度,12 :调制频率
②腔损耗率
(t) 0 cos t
o:腔平均损耗率, :损耗率变化幅度, :损耗频率
调制电信号为零时,损耗最小,调制电信号为极 值时,损耗最大,故损耗频率是调制频率的两倍
③调制器透过率 T (t) T0 T cos t
第q模的光场为
Eq (t)
E ei(ωqtq ) 0
E ei[(ω0 q)t(0 q)] 0
合光场为
n
n
E(t)
Eq (t)
E e A(t)e i[(ω0 q)t(0 q)] 0
i(ω0t0 )
qn
qn
n
n
A(t) E0 eiq(t) E0 eiqa
qn
qn
E0[eina ei(n1)a eia ei0 eia ei(n1)a eina ]
率均按中心频率输出功率计)③锁模后的光脉冲峰 值功率、重复周期、脉宽。
解
① T
ln ln
2
F
ln 2 950 950MHz ln 2
q
c 2L
3108 2 1.5
100MHz
q [ T ] 1 [950] 1 10
q
100
② I0 Is (2 1) 50 (22 -1) 150w/mm 2
d
d:晶体沿电场方向的长度
③折射率变化量
n(t )
1 2
ne3 33E
U 0 ne3
2d
33
cos
t
33:LN晶体有效电光系数
④相移 (t) 2 ln(t) lU0ne3 33 cos t
d
l:晶体沿通光方向的长度
⑤光的频移为 (t) d[(t)] lU0ne3 33 sin t
dt
d
证 相位 t 0 相移 t 0
T(t) T0
I(t)
0
t
t
T t
t
2L
4L
c
c
(5)频域原理 ①增益曲线中心频率处的纵模首先起振,光场为
E(t) E0cos(0t 0 )
E0:光场振幅,0:频率, 0:初位相
②声光器件对起振纵模进行振幅调制,调制光场
为 E(t) E0T(t)cos(0t 0 ) E0[T0 T cos t]cos(0t 0 )
A(1 M cos t) cos(0t 0 )
M
T0 T0
:调幅系数,
A=E0T0:调制后的光场振幅
③调制结果,使中心纵模产生初位相一样、频率
为0±的两个边模
E(t) A(1 Mcost)cos(0t 0 ) Acos(0t 0 ) AMcos(t)cos(0t 0 ) 0-
0 0+
Acos(0t
P
吸收
t
t
t
非线性 吸收 P
非线性
放大
P
t
t
P0
lim
a0
N sin sin
Na a
P0
lim
a0
N
2 cos Na cos a
N
2 P0
2、重复周期与重复频率
P
P0
sin 2
Na 2
sin
2
a 2
P
0
2
a
(N=4)
(1)重复周期 T 2L 光在腔内往返一周所用时间
c
(2)重复频率
f
c 2L
q
证 a1=t1+
a2=t2+
a2 – a1 =(t2-t1)= T=2
M
lU0ne3 33 d
:调相系数
③调制结果,使中心纵模产生初位相一样、频率
为0±的两个边模
E(t) E0cos[(0t 0 ) M cos t]
0- 0 0+
E0cos(0t 0 ) cos(M cos t) - E0sin( 0t 0 ) sin( M cos t)
M<<1 cos(M cos t) 1 sin( M cos t) M cos t
A2 (t)
P0
sin2
Na 2
sin
2
a 2
三、锁模激光器工作特性
1、峰值功率 Pm=N2P0
证 a=0、2、4…时P达最大 a=2/N、4/N…时P=0
Pm
lim
a0
P0
sin2
Na 2
sin
2
a 2
P0
lim
a0
2
sin
Na 2
cos
Na 2
N 2
2
sin
a 2
cos
a 2
1 2
n(t)、(t):电光效 t 应引起折射率变化
和相移的波形 t (t):光的频移波形
I(t):锁模激光输出波形
(5)频域原理 ①增益曲线中心频率处的纵模首先起振,光场为
E(t) E0cos(0t 0 )
E0:光场振幅,0:频率, 0:初位相
②电光器件对起振纵模进行相位调制,调制光场
为
E(t) E0cos[0t (t) 0 ] E0cos[(0t 0 ) M cos t]
0
)
1 2
AM[cos(0t
0
t)
cos(0t
0
t )]
Acos(0t
0
)
1 2
AMcos[(0
)t
0
]
1 2
AMcos[(0
-
)t
0 ]
④两个边模再产生新边模,直至振荡线宽内所有
纵模都被耦合形成脉冲系列输出。
3、相位(频率)调制模锁:电光锁模
(1)概念
使用电光晶体折射率随外加电压的变化对激光进
To:平均透过率,T:透过率变化的幅度 损耗最小时透过率最大,损耗最大时透过率最小
④透过率最大时,输出光脉冲,输出光脉冲的 重复频率与重复周期为
f
q
c 2L
T 2L c
(4)调制曲线
U(t):驱动声光器件的 外加调制电信号
(t):腔损耗率
U(t)
(t) 0
T(t):调制器透过率 I(t):锁模激光输出波形
第十章 锁模技术
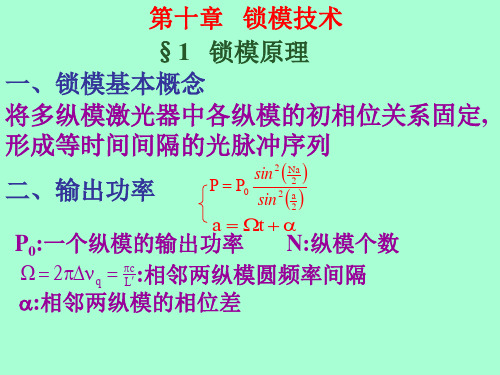
§1 锁模原理 一、锁模基本概念
将多纵模激光器中各纵模的初相位关系固定, 形成等时间间隔的光脉冲序列
二、输出功率
P
P0
sin2
Na 2
sin
2
a 2
a t
P0:一个纵模的输出功率 N:纵模个数
2q
c L
:相邻两纵模圆频率间隔
:相邻两纵模的相位差
证 设腔内共有N=2n+1个纵模,第q=0模的圆 频率、初相位为:0、0;第q模为:q=0+q、 q= 0 +q
频移
d ()
dt
⑥频移为零时,光信号可输出形成光脉冲,频 移不为零时,光信号经频移积累,移出增益曲 线而熄灭
⑦存在两组无关的脉冲系列,对应于相移波形的 极大值与极小值,随机输出其中任意一组
(4)调制曲线
U(t),n(t),(t)
(t)
I(t)
0
L
2L
c