操作系统实验三:进程调度
计算机操作系统进程调度实验报告
计算机操作系统进程调度实验报告实验报告:计算机操作系统进程调度1.实验背景与目的计算机操作系统是一种负责管理和协调计算机硬件和软件资源的系统。
进程调度作为操作系统的重要功能之一,主要负责决定哪些进程可以运行、何时运行以及运行多长时间等问题。
本实验旨在通过实践学习进程调度的原理和实现细节,加深对操作系统的理解。
2.实验原理与步骤(1)实验原理:进程调度的目标是充分利用计算机资源,提高系统的吞吐率和响应时间。
常用的调度算法有先来先服务(FCFS)、最短作业优先(SJF)、时间片轮转(RR)等。
在本实验中,我们将实现时间片轮转调度算法,并对比不同算法的性能差异。
(2)实验步骤:1)设计进程数据结构:创建进程控制块(PCB)结构体,包含进程的标识符、到达时间、服务时间、剩余时间、等待时间等信息。
2)生成进程:根据指定的进程个数和服务时间范围,生成随机的进程并初始化进程控制块。
3)时间片轮转调度算法:根据时间片大小,按照轮转调度的方式进行进程调度。
4)性能评估:通过记录进程的等待时间和周转时间,比较不同调度算法的性能差异。
3.实验结果与分析通过实验我们生成了10个进程,并使用时间片大小为2进行轮转调度。
下表列出了各个进程的信息及调度结果。
进程到达时间服务时间剩余时间等待时间周转时间P108068P214004P3291310P4350115P542032P6570147P763063P8761714P981071P1093104从实验结果可以看出,时间片轮转调度算法相对公平地分配了CPU给各个进程,减少了等待时间和周转时间。
但是,对于长时间服务的进程,可能出现饥饿问题,即一些耗时较长的进程无法得到充分的CPU时间。
与时间片轮转算法相比,先来先服务(FCFS)算法对于短作业具有更好的响应时间,但可能导致长作业等待时间过长。
最短作业优先(SJF)算法能够最大化短作业的优先级,提高整体性能。
4.实验总结与体会本次实验通过实践了解了进程调度的原理与实现细节,加深了对操作系统的理解。
操作系统实验报告进程调度

操作系统实验报告进程调度操作系统实验报告:进程调度引言在计算机科学领域中,操作系统是一个重要的概念,它负责管理和协调计算机系统中的各种资源,包括处理器、内存、输入/输出设备等。
其中,进程调度是操作系统中一个非常重要的组成部分,它负责决定哪个进程在何时获得处理器的使用权,以及如何有效地利用处理器资源。
实验目的本次实验的目的是通过对进程调度算法的实验,深入理解不同的进程调度算法对系统性能的影响,并掌握进程调度算法的实现方法。
实验环境本次实验使用了一台配备了Linux操作系统的计算机作为实验平台。
在该计算机上,我们使用了C语言编写了一些简单的进程调度算法,并通过模拟不同的进程调度场景进行了实验。
实验内容1. 先来先服务调度算法(FCFS)先来先服务调度算法是一种简单的进程调度算法,它按照进程到达的顺序进行调度。
在本次实验中,我们编写了一个简单的FCFS调度算法,并通过模拟多个进程同时到达的情况,观察其对系统性能的影响。
2. 短作业优先调度算法(SJF)短作业优先调度算法是一种根据进程执行时间长度进行调度的算法。
在本次实验中,我们编写了一个简单的SJF调度算法,并通过模拟不同长度的进程,观察其对系统性能的影响。
3. 时间片轮转调度算法(RR)时间片轮转调度算法是一种按照时间片大小进行调度的算法。
在本次实验中,我们编写了一个简单的RR调度算法,并通过模拟不同时间片大小的情况,观察其对系统性能的影响。
实验结果通过实验,我们发现不同的进程调度算法对系统性能有着不同的影响。
在FCFS 算法下,长作业会导致短作业等待时间过长;在SJF算法下,长作业会导致短作业饥饿现象;而RR算法则能够较好地平衡不同进程的执行。
因此,在实际应用中,需要根据具体情况选择合适的进程调度算法。
结论本次实验通过对进程调度算法的实验,深入理解了不同的进程调度算法对系统性能的影响,并掌握了进程调度算法的实现方法。
同时,也加深了对操作系统的理解,为今后的学习和研究打下了良好的基础。
进程调度程序实验报告
一、实验目的通过本次实验,加深对进程调度原理和算法的理解,掌握进程调度程序的设计与实现方法。
实验要求我们使用高级编程语言编写一个简单的进程调度程序,实现不同调度算法的模拟,并通过实验验证算法的性能。
二、实验环境1. 操作系统:Windows 102. 编程语言:Java3. 开发工具:IntelliJ IDEA三、实验内容本次实验主要实现以下调度算法:1. 先来先服务(FCFS)2. 最短作业优先(SJF)3. 时间片轮转(RR)四、实验步骤1. 定义进程类(Process):```javapublic class Process {private String processName; // 进程名称private int arrivalTime; // 到达时间private int burstTime; // 运行时间private int waitingTime; // 等待时间private int turnaroundTime; // 周转时间// 构造函数public Process(String processName, int arrivalTime, int burstTime) {this.processName = processName;this.arrivalTime = arrivalTime;this.burstTime = burstTime;}// 省略getter和setter方法}```2. 定义调度器类(Scheduler):```javapublic class Scheduler {private List<Process> processes; // 进程列表private int currentTime; // 当前时间// 构造函数public Scheduler(List<Process> processes) {this.processes = processes;this.currentTime = 0;}// FCFS调度算法public void fcfs() {for (Process process : processes) {process.setWaitingTime(currentTime -process.getArrivalTime());currentTime += process.getBurstTime();process.setTurnaroundTime(currentTime -process.getArrivalTime());}}// SJF调度算法public void sjf() {processes.sort((p1, p2) -> p1.getBurstTime() -p2.getBurstTime());for (Process process : processes) {process.setWaitingTime(currentTime -process.getArrivalTime());currentTime += process.getBurstTime();process.setTurnaroundTime(currentTime -process.getArrivalTime());}}// RR调度算法public void rr(int quantum) {List<Process> sortedProcesses = new ArrayList<>(processes);sortedProcesses.sort((p1, p2) -> p1.getArrivalTime() -p2.getArrivalTime());int timeSlice = quantum;for (Process process : sortedProcesses) {if (process.getBurstTime() > timeSlice) {process.setWaitingTime(currentTime - process.getArrivalTime());currentTime += timeSlice;process.setTurnaroundTime(currentTime - process.getArrivalTime());process.setBurstTime(process.getBurstTime() - timeSlice);} else {process.setWaitingTime(currentTime - process.getArrivalTime());currentTime += process.getBurstTime();process.setTurnaroundTime(currentTime - process.getArrivalTime());process.setBurstTime(0);}}}}```3. 测试调度程序:```javapublic class Main {public static void main(String[] args) {List<Process> processes = new ArrayList<>();processes.add(new Process("P1", 0, 5));processes.add(new Process("P3", 4, 2));processes.add(new Process("P4", 6, 4));Scheduler scheduler = new Scheduler(processes); System.out.println("FCFS调度结果:");scheduler.fcfs();for (Process process : processes) {System.out.println(process);}processes = new ArrayList<>();processes.add(new Process("P1", 0, 5));processes.add(new Process("P2", 1, 3));processes.add(new Process("P3", 4, 2));processes.add(new Process("P4", 6, 4));System.out.println("SJF调度结果:");scheduler.sjf();for (Process process : processes) {System.out.println(process);}processes = new ArrayList<>();processes.add(new Process("P1", 0, 5));processes.add(new Process("P2", 1, 3));processes.add(new Process("P3", 4, 2));System.out.println("RR调度结果(时间片为2):");scheduler.rr(2);for (Process process : processes) {System.out.println(process);}}}```五、实验结果与分析通过实验,我们可以观察到以下结果:1. FCFS调度算法简单,但可能导致长作业等待时间过长。
操作系统实验报告进程调度
操作系统实验报告进程调度操作系统实验报告:进程调度引言操作系统是计算机系统中最核心的软件之一,它负责管理和调度计算机的资源,提供良好的用户体验。
在操作系统中,进程调度是其中一个重要的功能,它决定了进程的执行顺序和时间片分配,对于提高计算机系统的效率和响应能力至关重要。
本篇实验报告将重点介绍进程调度的相关概念、算法和实验结果。
一、进程调度的概念进程调度是操作系统中的一个重要组成部分,它负责决定哪个进程可以使用CPU,并为其分配执行时间。
进程调度的目标是提高系统的吞吐量、响应时间和公平性。
在多道程序设计环境下,进程调度需要考虑多个进程之间的竞争和协作,以实现资源的合理利用。
二、进程调度算法1. 先来先服务调度(FCFS)先来先服务调度算法是最简单的进程调度算法之一,它按照进程到达的顺序进行调度,即先到达的进程先执行。
这种算法的优点是公平性高,缺点是无法适应长作业和短作业混合的情况,容易产生"饥饿"现象。
2. 最短作业优先调度(SJF)最短作业优先调度算法是根据进程的执行时间来进行调度的,即执行时间最短的进程先执行。
这种算法的优点是能够最大程度地减少平均等待时间,缺点是无法适应实时系统和长作业的情况。
3. 时间片轮转调度(RR)时间片轮转调度算法是一种抢占式调度算法,它将CPU的执行时间划分为固定大小的时间片,并按照轮转的方式分配给各个进程。
当一个进程的时间片用完后,它将被挂起,等待下一次调度。
这种算法的优点是能够保证每个进程都能够获得一定的执行时间,缺点是无法适应长作业和短作业混合的情况。
4. 优先级调度(Priority Scheduling)优先级调度算法是根据进程的优先级来进行调度的,优先级高的进程先执行。
这种算法的优点是能够根据进程的重要性和紧急程度进行灵活调度,缺点是可能会导致低优先级的进程长时间等待。
三、实验结果与分析在实验中,我们使用了不同的进程调度算法,并对其进行了性能测试。
操作系统实验三 时间片轮转法完成进程调度
实验三:时间片轮转法完成进程调度一、实验目的:(1)加深对进程的理解(2)理解进程控制块的结构(3)理解进程运行的并发性(4)掌握时间片轮转法进程调度算法实验内容:(1)建立进程控制块(2)设计三个链队列,分别表示运行队列、就绪队列和完成队列(3)用户输入进程标识符以及进程所需的时间,申请空间存放进程PCB信息。
(4)每一个时间片结束输出各进程的进程号,CPU时间(即已经占用的CPU时间),所需时间(即还需要的CPU时间),以及状态(即用W表示等待,R表示运行,F表示完成)实验程序:#include <stdio.h>#include <stdlib.h>#include <string.h>typedef struct node{char name[10];/*进程标识符*/int prio;/*进程优先数*/int round;/*进程时间轮转时间片*/int cputime; /*进程占用CPU时间*/int needtime; /*进程到完成还要的时间*/int count;/*计数器*/char state; /*进程的状态*/struct node *next; /*链指针*/}PCB;PCB *finish,*ready,*tail,*run; //队列指针int N,t; //进程数,时间片的大小void firstin(){run=ready;//就绪队列头指针赋值给运行头指针run->state='R'; //进程状态变为运行态ready=ready->next; //就绪队列头指针后移到下一进程}void prt1(char a)//输出标题函数{if(toupper(a)=='P')//优先级法printf("进程名占用CPU时间到完成还要的时间轮转时间片状态\n");} void prt2(char a,PCB *q)//进程PCB输出{if(toupper(a)=='P')//优先级法的输出printf("%4s %8d %12d %14d %8c\n",q->name,q->cputime,q->needtime,q->roun d,q->state);}void prt(char algo)//输出函数二、三、{PCB *p;prt1(algo);//输出标题if(run!=NULL)//如果运行指针不空prt2(algo,run);//输出当前正在运行的PCBp=ready;//输出就绪队列PCBwhile(p!=NULL){prt2(algo,p);p=p->next;}p=finish;//输出完成队列的PCBwhile(p!=NULL){prt2(algo,p);p=p->next;}getchar(); //按住任意键继续}void insert(PCB *q)//时间片轮转的插入算法{PCB *p1,*s,*r;s=q;//待插入的PCB指针p1=ready;//就绪队列头指针r=p1;//*r做pl的前驱指针while(p1!=NULL)if(p1->round<=s->round){r=p1;p1=p1->next;}if(r!=p1){r->next=s;s->next=p1;}else{s->next=p1;//否则插入在就绪队列的头ready=s;}}void create(char alg)//时间片轮转法创建链表进程PCB{PCB *p;int i,time;char na[10];ready=NULL;finish=NULL;run=NULL;printf("输入进程名及其需要运行的时间(中间以空格隔开):\n"); for(i=1;i<=N;i++){p=new PCB;scanf("%s %d",&na,&time);strcpy(p->name,na);p->cputime=0;p->needtime=time;p->state='W';//进程的状态p->round=0;if(ready!=NULL)insert(p);else{p->next=ready;ready=p;}}printf("*************时间片轮转法进程调度过程*************\n"); prt(alg);run=ready;ready=ready->next;run->state='R';}void timeslicecycle(char alg)//时间片轮转法{while(run!=NULL){run->cputime=run->cputime+t;//处理时间加trun->needtime=run->needtime-t;//完成需要时间减trun->round=run->round+t;//运行完将其变为完成态,插入完成队列if(run->needtime<=0)//当进程完成时{run->next=finish;finish=run;run->state='F';run=NULL;if(ready!=NULL)//就绪队列不空,将第一个进程投入进行firstin();}else{run->state='W';//将进程插入到就绪队列中等待轮转insert(run);//将就绪队列的第一个进程投入运行firstin();}prt(alg);}}void main()//主函数{char algo='P';//算法标记printf("输入进程的个数:");scanf("%d",&N);//输入进程数printf("定义时间片大小:");scanf("%d",&t);//输入时间片大小create(algo);//创建进程timeslicecycle(algo);//时间片轮转法调度}//main()四、实验结果:五、实验小结:时间片轮转调度是一种最古老,最简单,最公平且使用最广的算法。
电大操作系统实验报告3_ 进程管理实验

电大操作系统实验报告3_ 进程管理实验电大操作系统实验报告 3 进程管理实验一、实验目的进程管理是操作系统的核心功能之一,本次实验的目的是通过实际操作和观察,深入理解进程的概念、状态转换、进程调度以及进程间的通信机制,掌握操作系统中进程管理的基本原理和方法,提高对操作系统的整体认识和实践能力。
二、实验环境本次实验使用的操作系统为 Windows 10,编程语言为 C 语言,开发工具为 Visual Studio 2019。
三、实验内容及步骤(一)进程的创建与终止1、编写一个 C 程序,使用系统调用创建一个子进程。
2、在父进程和子进程中分别输出各自的进程 ID 和父进程 ID。
3、子进程执行一段简单的计算任务,父进程等待子进程结束后输出结束信息。
以下是实现上述功能的 C 程序代码:```cinclude <stdioh>include <stdlibh>include <unistdh>int main(){pid_t pid;pid = fork();if (pid < 0) {printf("创建子进程失败\n");return 1;} else if (pid == 0) {printf("子进程:我的进程 ID 是%d,父进程 ID 是%d\n",getpid(), getppid());int result = 2 + 3;printf("子进程计算结果:2 + 3 =%d\n", result);exit(0);} else {printf("父进程:我的进程 ID 是%d,子进程 ID 是%d\n",getpid(), pid);wait(NULL);printf("子进程已结束\n");}return 0;}```编译并运行上述程序,可以观察到父进程和子进程的输出信息,验证了进程的创建和终止过程。
(二)进程的状态转换1、编写一个 C 程序,创建一个子进程,子进程进入睡眠状态一段时间,然后被唤醒并输出状态转换信息。
进程调度操作系统实验报告

进程调度操作系统实验报告一、实验目的本次实验的主要目的是深入理解操作系统中进程调度的概念和原理,通过实际编程和模拟,观察不同调度算法对系统性能的影响,并掌握进程调度的实现方法。
二、实验环境操作系统:Windows 10编程语言:C++开发工具:Visual Studio 2019三、实验原理进程调度是操作系统的核心功能之一,它负责决定哪个进程在何时获得 CPU 资源进行执行。
常见的进程调度算法有先来先服务(FCFS)、短作业优先(SJF)、时间片轮转(RR)、优先级调度等。
先来先服务算法按照进程到达的先后顺序进行调度,先到达的进程先获得 CPU 执行。
这种算法简单直观,但可能导致短作业等待时间过长。
短作业优先算法优先调度执行时间短的进程,能有效减少平均等待时间,但可能导致长作业饥饿。
时间片轮转算法将 CPU 时间划分成固定大小的时间片,每个进程轮流获得一个时间片进行执行。
如果进程在时间片内未完成,则被放回就绪队列等待下一轮调度。
优先级调度根据进程的优先级来决定调度顺序,优先级高的进程先获得 CPU 资源。
四、实验步骤1、设计进程结构体定义进程的标识号(PID)、到达时间、服务时间、剩余时间、优先级等属性。
2、实现先来先服务算法按照进程到达的先后顺序将它们放入就绪队列。
从就绪队列中取出第一个进程进行调度执行,直到其完成。
3、实现短作业优先算法计算每个进程的剩余服务时间。
将进程按照剩余服务时间从小到大排序,放入就绪队列。
从就绪队列中取出剩余服务时间最短的进程进行调度执行。
4、实现时间片轮转算法设定时间片大小。
将进程放入就绪队列,按照先来先服务的原则依次分配时间片执行。
进程在时间片内未完成的,放回就绪队列末尾。
5、实现优先级调度算法为每个进程设置优先级。
将进程按照优先级从高到低排序,放入就绪队列。
从就绪队列中取出优先级最高的进程进行调度执行。
6、计算平均周转时间和平均带权周转时间周转时间=完成时间到达时间带权周转时间=周转时间/服务时间平均周转时间=总周转时间/进程数平均带权周转时间=总带权周转时间/进程数7、输出调度结果包括每个进程的调度顺序、开始时间、结束时间、周转时间、带权周转时间等。
《操作系统》上机实验报告—进程调度
《操作系统》上机实验报告实验算法主体内容及#include<stdio.h>#include<dos.h>#include<stdlib.h>#include<conio.h>#include<iostream.h>#define P_NUM 5 // 共有5 个进程#define P_TIME 50 //作为优先数计算时所用的值enum state{ready,execute,block, finish};//进程的状态,使用枚举struct pcb{char name[4]; // 进程名称int priority; //进程优先级int cputime; //已经占有cpu运行的时间int needtime; //还需要运行的时间int count; //在时间片轮转法中使用的int round; //在时间片轮转法中使用的state process; //进程的状态pcb *next; //指向下一个进程的pcb};pcb *get_process() //通过输入各进程的值来建立pcb队列,并返回其首元素的指针{pcb *q;pcb *t;pcb *p;int i=0;coutvv"请输入进程名与时间"<<endl;while(i<P_NUM){q=(struct pcb *)malloc(sizeof(pcb));cin>>q->name; cin>>q->needtime; q->cputime=O;q->priority=P_TIME-q->needtime;q->round=0; q->count=0;q->process=ready;q->next=NULL;if (i==0){p=q;t=q;}else{ t->next=q; t=q; } i++;}return p;}void display(pcb *p) //显示本轮运行后的进程各状态情况{coutvv" 进程各状态情况"vvendl;coutvv"名称"vv" "vv"进入时间"vv" "vv"还需时间"vv" "vv"优先级"vv" "vv"状态"vvendl;while(p){coutvvp->name;coutvv" ";coutvvp->cputime;coutvv" ";coutvvp->needtime;coutvv" ";cout<vp_>priority;coutvv"";switch(p->process) //对枚举类型的输出方法{case ready:cout< <"就绪"<<endl;break;case execute:cout< <"执行"<<endl;break;case block:cout<<"阻塞"<<endl;break;case finish:cout<<"完成"<<endl;break;} p=p->next;}}int process_finish(pcb *q) //判断所有的进程是否运行结束{ -int b=1;while(q&&b){b=b&&q->needtime==O; q=q_>next;} return b;}void cpuexe(pcb *q) //优先级调度算法的一次执行{pcb *t;t=q;int i=0;while(q){if (q->process!=finish){q_>process=ready;if(q->needtime==0) q->process=finish;} if(i<q->priority) if(q->process!=finish){ t=q;i=q->priority;} q=q->next;}t->needtime-=1;t_>priority_=3; if(t->needtime==0)t->process=finish; t->cputime+=1;}void priority_cal() //优先级调度算法{pcb *p;P=get_process();〃取得进程队列int cpu=0;while(!process_finish(p)) //若进程并未全部结束,则还需要执行{cpu++;coutvv"运行次数:"vvcpuwendl; cpuexe(p);//一次cpu的执行display(p);//显示本次执行结果}}pcb * get_process_round()Jpcb *q;pcb *t;pcb *p;int i=0;coutvv"请输入进程名与时间"《endl;while (i<P_NUM){q=(struct pcb *)malloc(sizeof(pcb));cin>>q->name;cin>>q->needtime; q->cputime=O;q->round=0;q->count=0;q_>process=ready; q->next=NULL; if(i==0){p=q;t=q;}else{} i++; } return p;} t->next=q; t=q;void cpu_round(pcb *q){-q->count++;q->cputime+=2;q->needtime-=2;if(q->needtime<0)q->needtime=0;q->round++;q->process=execute;}pcb *get_next(pcb *k,pcb *head){ -pcb *t;t=k; do{t=t->next;}while (t && t->process==finish);if(t==NULL){} return t; t=head;while (t->next!=k && t->process==finish) {t=t->next;}void set_state(pcb *p){-while(p){if (p->needtime==O){p->process=finish;}if (p->process==execute){p_>process=ready;} p=p_>next;}}void display_round(pcb *p){ -cout«" 进程各状态情况"vvendl;coutvv"名称"vv" "vv"进入时间"vv" "vv"还需时间"vv" "vv"时间片"vv"" vv"次数"vv""vv"状态"vvendl;while(p){coutvvp->name;coutvv" ";coutvvp->cputime;coutvv" ";coutvvp->needtime;coutvv" ";coutvvp->round;coutvv"";coutvvp->count;coutvv"";switch(p->process){case ready:coutv v"就绪"vvendl;break;case execute:coutvv'执行"vvendl;break;case finish:coutvv"完成"vvendl;break;}p=p->next;}}void round_cal(){pcb *p;pcb *r;p=get_process();int cpu=0;r=p;while(!process_finish(p)){cpu+=2;cpu_round(r);r=get_next(r,p);coutvv"运行次数"vvcpuvvendl;display_round(p);set_state(p);} }-void display_menu(){ -coutvv"进程调度算法操作:"vvendl;coutvv"1 优先数"vvendl;coutvv"2 时间片轮转"vvendl;coutvv"3 退出"vvendl;}void main(){display_menu();int k;printf("请选择:");scanf("%d",&k);switch(k){case 1:priority_cal();break;case 2:round_cal();break;case 3:break;}} ----------------------------------------------------------------------------------------------------------测试数据:¥间出择1A.时退选r 5642 3込簷运行结果:1优先数S却曰石石<奪--a S 亠 亡疋出尢尤扫 亡、 ^a ^T B a 抄各时 各时 进还进还称进入时|可0 3 0I! IS 运行次数 “称进入时间II态成養成成忧完就完完完&0 94 2R p f c 32 3 4 3 % 扰冋运行次数心 泊称进入吋冋R5 R 5 C4 卜2佳行次数陰态成成成成成状§_f c s ^H Z B6 4 28尸尤32 3 4结果截图与分析2、时间片轮转10 0名称进入时问64 42 运行次数t k 称进入吋间A称进入时间竇鶴躺翻聶s _^->4p 者者者奁廿者_J-^□者者HiH8 数 謝还轎時 0 00 0 0次数0 口2 1 21 2 3 3216 6 42 2 1 20 Q 0D F次数3 E34 4 1 1 e s 02 0 0态成成态成衣成成些兀执完lla兀。
实验进程调度的实验报告

一、实验目的1. 加深对进程概念和进程调度算法的理解。
2. 掌握进程调度算法的基本原理和实现方法。
3. 培养编程能力和系统分析能力。
二、实验环境1. 操作系统:Windows 102. 编程语言:C++3. 开发工具:Visual Studio 2019三、实验内容1. 实现进程调度算法2. 创建进程控制块(PCB)3. 模拟进程调度过程四、实验原理进程调度是操作系统核心功能之一,负责将CPU分配给就绪队列中的进程。
常见的进程调度算法有先来先服务(FCFS)、短作业优先(SJF)、优先级调度、时间片轮转(RR)等。
1. 先来先服务(FCFS)算法:按照进程到达就绪队列的顺序进行调度。
2. 短作业优先(SJF)算法:优先调度运行时间最短的进程。
3. 优先级调度算法:根据进程的优先级进行调度,优先级高的进程优先执行。
4. 时间片轮转(RR)算法:每个进程分配一个时间片,按顺序轮流执行,时间片结束后进行调度。
五、实验步骤1. 定义进程控制块(PCB)结构体,包含进程名、到达时间、运行时间、优先级、状态等信息。
2. 创建进程队列,用于存储就绪队列、等待队列和完成队列。
3. 实现进程调度算法:a. FCFS算法:按照进程到达就绪队列的顺序进行调度。
b. SJF算法:优先调度运行时间最短的进程。
c. 优先级调度算法:根据进程的优先级进行调度。
d. 时间片轮转(RR)算法:每个进程分配一个时间片,按顺序轮流执行。
4. 模拟进程调度过程:a. 初始化进程队列,将进程添加到就绪队列。
b. 循环执行调度算法,将CPU分配给就绪队列中的进程。
c. 更新进程状态,统计进程执行时间、等待时间等指标。
d. 当进程完成时,将其移至完成队列。
六、实验结果与分析1. FCFS算法:按照进程到达就绪队列的顺序进行调度,简单易实现,但可能导致短作业等待时间过长。
2. SJF算法:优先调度运行时间最短的进程,能提高系统吞吐量,但可能导致进程饥饿。
进程调度 实验报告
进程调度实验报告进程调度实验报告概述:进程调度是操作系统中一个重要的组成部分,它负责决定在多个进程同时运行时,每个进程分配到的CPU时间片以及切换进程的时机。
合理的进程调度算法能够提高系统的性能和资源利用率,因此对进程调度的研究和优化具有重要意义。
1. 背景介绍进程调度是操作系统中的一个关键任务,它负责管理和控制多个进程的执行顺序,以实现对CPU的合理分配。
在多道程序设计环境下,进程调度的作用尤为重要。
进程调度算法的好坏直接影响着系统的性能和响应速度。
2. 进程调度算法2.1 先来先服务(FCFS)先来先服务是最简单的调度算法之一,它按照进程到达的先后顺序进行调度,即先到达的进程先执行,直到该进程执行完成或者发生I/O操作。
FCFS算法的优点是公平且易于实现,但是它无法适应不同进程的执行时间差异,可能导致长作业效应。
2.2 最短作业优先(SJF)最短作业优先调度算法是根据进程的执行时间长度来进行调度,执行时间越短的进程越优先执行。
SJF算法能够最大程度地减少平均等待时间,但是它需要预先知道进程的执行时间,这在实际应用中往往是不可行的。
2.3 时间片轮转(RR)时间片轮转是一种经典的调度算法,它将CPU的执行时间划分为若干个时间片,每个进程在一个时间片内执行,如果时间片用完还没有执行完,则将该进程放入就绪队列的末尾,继续执行下一个进程。
RR算法能够保证每个进程都能获得公平的CPU时间,但是对于长时间执行的进程,会导致较大的上下文切换开销。
3. 实验设计与结果分析为了评估不同进程调度算法的性能,我们设计了一系列实验。
首先,我们使用不同的进程到达时间和执行时间生成一组测试数据。
然后,分别使用FCFS、SJF和RR算法进行调度,并记录每个进程的等待时间和周转时间。
最后,我们对实验结果进行分析。
实验结果显示,FCFS算法对于执行时间较长的进程会出现较长的平均等待时间,而SJF算法能够有效减少平均等待时间。
操作系统进程调度实验报告

一、实验目的无论是批处理系统、分时系统还是实时系统,用户进程数一般都大于处理机数,这将导致用户进程互相争夺处理机。
这就要求进程调度程序按一定的策略,动态地把处理机分配给处于就绪队列中的某一进程,以使之执行。
进程调度是处理机管理的核心内容。
本实验要求采用调度算法编写和调试一个简单的进程调度程序。
通过本实验可以加深理解有关进程控制块、进程队列、阻塞队列、就绪队列等的概念。
并了解CPU分配资源的方式。
二、实验要求调试一个进程调度程序,对程序进行注释,理解每条语句的用意,掌握CPU对进城进程分配资源的方式,以加深对进程概念及进程调度算法的理解。
三、实验内容1.进程调度算法:采用最高优先数优先的调度算法(即把处理机分配给优先数最高的进程)和先来先服务算法(将用户作业和就绪进程按提交顺序或变为就绪状态的先后排成队列,并按照先来先服务的方式进行调度处理)。
2.进程控制块每个进程有一个进程控制块( PCB)表示。
进程控制块可以包含如下信息:进程ID、进程IP、进程指令(优先级数)、运行时间、阻塞时间、阻塞状况、占用资源情况等。
进程的优先数及需要的运行时间可以事先人为地指定,即输入进程的执行指令。
进程的运行时间以时间片为单位进行计算。
每个进程的状态可以是就绪、运行和阻塞三种状态之一。
3.资源资源包括资源ID、资源状态(是否被占用)、使用资源的进程ID、进程指针以及使用时间。
程序规定CPU资源数为1,既所有进程只能请求同一资源,如果所请求资源已被占用,则进程进入阻塞队列等待资源。
4.CPUCPU包括执行中的进程指针、就绪队列、阻塞队列、CPU资源、进程数、阻塞进程数以及CPU运行时间。
就绪进程获得 CPU后都只能运行一个时间片。
用已占用CPU时间加1来表示。
如果运行一个时间片后,进程的已占用 CPU时间已达到所需要的运行时间,则撤消该进程,如果运行一个时间片后进程的已占用CPU时间还未达所需要的运行时间,也就是进程还需要继续运行,此时应将进程的优先数减1(即降低一级),然后把它插入就绪队列等待CPU。
进程的调度实验报告(3篇)

第1篇一、实验目的通过本次实验,加深对操作系统进程调度原理的理解,掌握先来先服务(FCFS)、时间片轮转(RR)和动态优先级(DP)三种常见调度算法的实现,并能够分析这些算法的优缺点,提高程序设计能力。
二、实验环境- 编程语言:C语言- 操作系统:Linux- 编译器:GCC三、实验内容本实验主要实现以下内容:1. 定义进程控制块(PCB)结构体,包含进程名、到达时间、服务时间、优先级、状态等信息。
2. 实现三种调度算法:FCFS、RR和DP。
3. 创建一个进程队列,用于存储所有进程。
4. 实现调度函数,根据所选算法选择下一个执行的进程。
5. 模拟进程执行过程,打印进程执行状态和就绪队列。
四、实验步骤1. 定义PCB结构体:```ctypedef struct PCB {char processName[10];int arrivalTime;int serviceTime;int priority;int usedTime;int state; // 0: 等待,1: 运行,2: 完成} PCB;```2. 创建进程队列:```cPCB processes[MAX_PROCESSES]; // 假设最多有MAX_PROCESSES个进程int processCount = 0; // 实际进程数量```3. 实现三种调度算法:(1)FCFS调度算法:```cvoid fcfsScheduling() {int i, j;for (i = 0; i < processCount; i++) {processes[i].state = 1; // 设置为运行状态printf("正在运行进程:%s\n", processes[i].processName); processes[i].usedTime++;if (processes[i].usedTime == processes[i].serviceTime) { processes[i].state = 2; // 设置为完成状态printf("进程:%s 完成\n", processes[i].processName); }for (j = i + 1; j < processCount; j++) {processes[j].arrivalTime--;}}}```(2)RR调度算法:```cvoid rrScheduling() {int i, j, quantum = 1; // 时间片for (i = 0; i < processCount; i++) {processes[i].state = 1; // 设置为运行状态printf("正在运行进程:%s\n", processes[i].processName); processes[i].usedTime++;processes[i].serviceTime--;if (processes[i].serviceTime <= 0) {processes[i].state = 2; // 设置为完成状态printf("进程:%s 完成\n", processes[i].processName); } else {processes[i].arrivalTime++;}for (j = i + 1; j < processCount; j++) {processes[j].arrivalTime--;}}}```(3)DP调度算法:```cvoid dpScheduling() {int i, j, minPriority = MAX_PRIORITY;int minIndex = -1;for (i = 0; i < processCount; i++) {if (processes[i].arrivalTime <= 0 && processes[i].priority < minPriority) {minPriority = processes[i].priority;minIndex = i;}}if (minIndex != -1) {processes[minIndex].state = 1; // 设置为运行状态printf("正在运行进程:%s\n", processes[minIndex].processName);processes[minIndex].usedTime++;processes[minIndex].priority--;processes[minIndex].serviceTime--;if (processes[minIndex].serviceTime <= 0) {processes[minIndex].state = 2; // 设置为完成状态printf("进程:%s 完成\n", processes[minIndex].processName); }}}```4. 模拟进程执行过程:```cvoid simulateProcess() {printf("请选择调度算法(1:FCFS,2:RR,3:DP):");int choice;scanf("%d", &choice);switch (choice) {case 1:fcfsScheduling();break;case 2:rrScheduling();break;case 3:dpScheduling();break;default:printf("无效的调度算法选择。
操作系统实验——动态优先级进程调度实验报告
1.实验名称:动态优先权调度过程中就绪队列的模拟2.实验要求:采用动态优先权的进程调度算法,用C语言编程模拟调度过程中每个时间片内的就绪队列。
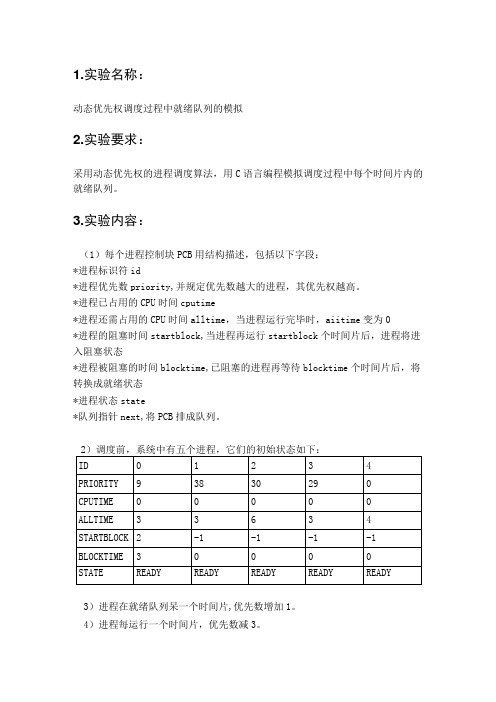
3.实验内容:(1)每个进程控制块PCB用结构描述,包括以下字段:*进程标识符id*进程优先数priority,并规定优先数越大的进程,其优先权越高。
*进程已占用的CPU时间cputime*进程还需占用的CPU时间alltime,当进程运行完毕时,aiitime变为0*进程的阻塞时间startblock,当进程再运行startblock个时间片后,进程将进入阻塞状态*进程被阻塞的时间blocktime,已阻塞的进程再等待blocktime个时间片后,将转换成就绪状态*进程状态state*队列指针next,将PCB排成队列。
2)调度前,系统中有五个进程,它们的初始状态如下:3)进程在就绪队列呆一个时间片,优先数增加1。
4)进程每运行一个时间片,优先数减3。
5)按下面格式显示每个时间片内就绪队列的情况:READY_QUEUE:->id1->id24.任务分析进程控制块用结构体来表示,包含它的各项属性。
建立两个队列:一个就绪队列,一个阻塞队列。
创建一个进程控制块表示当前正在运行的进程。
程序开始运行时,所有进程都在就绪队列中。
当startblock减少到0时,进程进入阻塞队列。
在阻塞队列中的进程,当blocktime减少到0时,转入就绪队列。
在就绪队列中的进程,如果优先级比当前正在执行的进程高,就可以取代当前进程获取时间片。
当前进程如果运行完毕,就绪队列中优先级最高的进程就可以成为新当前进程。
5.程序流程图#include〈iostream〉#include〈string〉usingnamespace std;#define LEN5typedefenum STATE{READYBLOCKEND}STATE;//定义进程控制块typedefstruct PCB{int id;int priority;int cputime;int alltime;int startblock;int blocktime;STATE state;}PCB;//定义队列typedefstruct queue{int si ze;PCB*data[LEN];}Queue;PCB ps[LEN];PCB*cp; //进程最大数量//进程状态//就绪//阻塞//完成//进程标识符//进程优先级//已占用的CPU时间//还需占用的CPu时间//阻塞时间//被阻塞时间//进程状态//队列中进程的数量//进程的指针//进程数组//当前正在运行的进程6.程序清单Queue rQueue,bQueue;//就绪队列和阻塞队列//就绪队列按优先级降序排序(使用了冒泡排序法)void rQueueSort(){ PCB*temp;for(int i=0;i<rQueue.size-1;i++){for(int j=0;j<rQueue.size-1-i;j++){if(rQueue.data[j]-〉priority<rQueue.data[j+1]-〉priority){temp=rQueue.data[j];rQueue.data[j]=rQueue.data[j+1];}}rQueue.dataj+1]=temp;}}//初始化void init(){//给进程赋值for(int i=0;i<LEN;i++){ps[i].id=i;ps[i].state=READY;ps[i].cputime=0;ps[i].alltime=3;ps[i].blocktime=0;ps[i].startblock=T;}ps[0].priority=9;ps[1].priority=38;ps[2].priority=30;ps[3].priority=29;ps[4].priority=0;ps[2].alltime=6;ps[4].alltime=4;ps[0].startblock=2;ps[0].blocktime=3;cp=NULL;//当前进程赋空bQueue.size=0;//阻塞队列没有进程for(int i=0;i<LEN;i++){bQueue.data[i]=NULL;rQueue.data[i]=&ps[i];}rQueue.size=5;//所有进程全部进入就绪队列rQueueSort();//对就绪队列排序}//打印void print(){cout〈〈"\nRUNNINGPROG:";if(cp!=NULL){cout〈〈cp->id;}cout<<"\nREADY_QUEUE:";for(int i=0;i<rQueue.size;i++){cout〈〈"-〉"〈〈rQueue.data[i]-〉id; }cout<<"\nBLOCK_QUEUE:";for(int i=0;i<bQueue.size;i++){cout〈〈"-〉"〈〈bQueue.data[i]-〉id; }cout〈〈"\n"<<endl;cout<<"ID\t\t";for(int i=0;i<LEN;i++){cout〈〈ps[i].id<<"\t";}cout<<"\nPRI0RITY\t";for(int i=0;i<LEN;i++){cout〈〈ps[i].priority〈〈"\t";}cout<<"\nCPUTIME\t\t";for(int i=0;i<LEN;i++){cout〈〈ps[i].cputime〈〈"\t";}cout<<"\nALLTIME\t\t";for(int i=0;i<LEN;i++){cout〈〈ps[i].alltime〈〈"\t";}cout<<"\nSTARTBLOCK\t";for(int i=0;i<LEN;i++){cout〈〈ps[i].startblock<<"\t";}cout<<"\nBLOCKTIME\t";for(int i=0;i<LEN;i++){cout〈〈ps[i].blocktime<<"\t";}cout<<"\nSTATE\t\t";for(int i=0;i<LEN;i++){if(ps[i].state==READY){cout<<"READY"<<"\t";}elseif(ps[i].state==BLOCK){cout<<"BLOCK"<<"\t";}elseif(ps[i].state==END){cout〈〈"END"<<"\t";}}cout〈〈endl;}//出队,返回进程指针PCB*pop(Queue*q){PCB*temp;if(q-〉size>0){temp=q-〉data[0];//取出队首进程for(int i=0;i<q-〉size-1;i++){q-〉data[i]=q-〉data[i+1];//其他进程依次向前移动}q->size__;return temp;//返回队首进程}return NULL;}//入队void push(Queue*q,PCB*p){if(q_>size<LEN){q_>data[q_〉size]=p;//将入队的进程放在队尾q_>size++;}return;}//运行进程void run(){if(rQueue.size〉0||bQueue.size〉0){if(cp==NULL){//程序一开始运行时,从就绪队列取出首进程cp=pop(&rQueue);}//当前进程没有结束,但优先级比就绪队列首进程低if(cp_〉alltime〉0&&cp_>priority<rQueue.data[0]_〉priority){}push(&r Queue,c//改变进程状态//从就绪队列取出新的当前进程//修改当前进程的状态 //将当前进程加入阻塞队列 //从就绪队列取出新的当前进程{//当前进程的startblock 为正数时//运行一次减一个时间片//减到0时,修改进程状态//每运行一个时间片//就绪队列中的进程优先级+1//每运行一个时间片//阻塞队列中的进程blocktime-1//将当前进程放入就绪队列 //就绪队列队首进程成为当前进程if (cp-〉alltime==0){cp->state =END ;cp=pop(&rQueue); }//如果当前进程运行结束//startblock 为0,标志着当前进程要进入阻塞状态if (cp —>startblock==0&&cp —>blocktime>0){cp —>state=BLOCK ; push(&bQueue,cp); cp=pop(&rQueue); }elseif (cp —>startblock>0)cp —>st artblock 一; }cp —>alltime ——;if (cp —>alltime==0){cp —>state=END ;for (int i=0;i<rQueue.size;i++){rQueue.data[i]-〉priority++; }for (int i=0;i<bQueue.size;i++){if (bQueue.data[i]-〉blocktime>0){bQueue.data[i]-〉blocktime--; }//当阻塞队列队首进程blocktime 为0时if (bQueue.size 〉0&&bQueue.data[0]-〉blocktime==0){bQueue.data[0]-〉state=READY ;//修改进程状态push(&rQueue,pop(&bQueue));//将阻塞队列首进程取出,放入就绪队列cp —〉priority-=3;//修改当前进程的优先级cp —>cputime++; //当前进程占用CPU 时间片+1 if (cp —>alltime>0){//当前进程还需运行的时间片-1}//每运行一个时间片,就绪队列排一次序rQueueSort();} }//主函数int main(){init();//初始化 print();//打印进程信息 while (1){_sleep(1000);if (rQueue.size==0&&bQueue.size==0){//当两个队列都为空时,结束程序cp-〉state=END ;break ; }run();//运行进程 print();//打印进程信息 }return 0; }7.实验过程记录m 匚:\WINDQWS\system32\cmd.exe程序开始执行,当前进程是优先级最高的1号进程,1号进程的优先级减3、cputime++、执行几次之后,1号进程执行完毕而且优先级也不是最高的了,所以优先级为33的2号进程成为当前进程,开始执行。
操作系统进程调度实验报告

操作系统进程调度实验报告操作系统进程调度实验报告引言:操作系统是计算机系统中的核心软件之一,负责管理计算机的硬件资源并提供用户与计算机硬件之间的接口。
进程调度作为操作系统的重要功能之一,负责决定哪个进程可以获得处理器的使用权,以及进程如何在处理器上运行。
本实验旨在通过设计和实现一个简单的进程调度算法,加深对操作系统进程调度原理的理解。
一、实验目的本实验的主要目的是通过编写代码模拟操作系统的进程调度过程,掌握进程调度算法的实现方法,深入理解不同调度算法的特点和适用场景。
二、实验环境本实验使用C语言进行编程实现,可在Linux或Windows系统下进行。
三、实验内容1. 进程调度算法的选择在本实验中,我们选择了最简单的先来先服务(FCFS)调度算法作为实现对象。
FCFS算法按照进程到达的先后顺序进行调度,即先到先服务。
这种调度算法的优点是简单易实现,但缺点是无法适应不同进程的执行时间差异,可能导致长作业效应。
2. 进程调度的数据结构在实现进程调度算法时,我们需要定义进程的数据结构。
一个进程通常包含进程ID、到达时间、执行时间等信息。
我们可以使用结构体来表示一个进程,例如:```struct Process {int pid; // 进程IDint arrival_time; // 到达时间int burst_time; // 执行时间};```3. 进程调度算法的实现在FCFS调度算法中,我们需要按照进程到达的先后顺序进行调度。
具体实现时,可以使用一个队列来保存待调度的进程,并按照到达时间的先后顺序将进程入队。
然后,按照队列中的顺序依次执行进程,直到所有进程执行完毕。
4. 实验结果分析通过实现FCFS调度算法,我们可以观察到进程调度的过程和结果。
可以通过输出每个进程的执行顺序、等待时间和周转时间等指标来分析调度算法的效果。
通过比较不同调度算法的指标,可以得出不同算法的优缺点。
四、实验步骤1. 定义进程的数据结构,包括进程ID、到达时间和执行时间等信息。
进程调度实验报告答案(3篇)
第1篇一、实验目的通过本次实验,加深对操作系统进程调度过程的理解,掌握三种基本调度算法(先来先服务(FCFS)、时间片轮转、动态优先级调度)的原理和实现方法,并能够通过编程模拟进程调度过程,分析不同调度算法的性能特点。
二、实验环境1. 操作系统:Linux/Windows2. 编程语言:C/C++3. 开发环境:Visual Studio、Code::Blocks等三、实验内容1. 实现三种基本调度算法:FCFS、时间片轮转、动态优先级调度。
2. 编写代码模拟进程调度过程,包括进程创建、进程调度、进程运行、进程结束等环节。
3. 每次调度后,打印当前运行的进程、就绪队列以及所有进程的PCB信息。
4. 编写实验报告,描述数据结构、算法流程,展示实验结果,并总结心得。
四、实验步骤1. 定义进程控制块(PCB)结构体,包含进程名、到达时间、服务时间、已用时间、优先数、进程状态等信息。
2. 实现进程调度函数,根据所选调度算法进行进程调度。
3. 编写主函数,初始化进程信息,选择调度算法,并模拟进程调度过程。
4. 每次调度后,打印当前运行的进程、就绪队列以及所有进程的PCB信息。
5. 编写实验报告,描述数据结构、算法流程,展示实验结果,并总结心得。
五、实验结果与分析1. FCFS调度算法实验结果:按照进程到达时间依次调度,每个进程结束后,调度下一个进程。
分析:FCFS调度算法简单,易于实现,但可能会导致进程的响应时间较长,特别是当有大量进程到达时,后到达的进程可能会长时间等待。
2. 时间片轮转调度算法实验结果:每个进程完成一个时间片后,放弃处理机,转到就绪队列队尾。
分析:时间片轮转调度算法能够保证每个进程都能得到一定的运行时间,但可能会出现进程饥饿现象,即某些进程长时间得不到运行。
3. 动态优先级调度算法实验结果:每个进程完成一个时间片后,优先级减1,插入到就绪队列相关位置。
分析:动态优先级调度算法能够根据进程的运行情况动态调整优先级,使得优先级高的进程能够得到更多的运行时间,从而提高系统的响应速度。
操作系统实验报告-进程调度实验

进程调度实验一.实验目的及要求:进程调度算法:采用最高优先数优先的调度算法(即把处理机分配给优先数最高的进程)和先来先服务算法。
就绪进程获得CPU后都只能运行一个时间片。
用已占用CPU时间加1来表示。
如果运行一个时间片后,进程的已占用CPU时间已达到所需要的运行时间,则撤消该进程,如果运行一个时间片后进程的已占用CPU时间还未达所需要的运行时间,也就是进程还需要继续运行,此时应将进程的优先数减1(即降低一级),然后把它插入就绪队列等待CPU。
每进行一次调度程序都打印一次运行进程、就绪队列、以及各个进程的PCB,以便进行检查。
重复以上过程,直到所要进程都完成为止。
二 . 实验环境:操作系统:Windows XP编译环境:Visual C++ 6.0三.算法描述进程调度算法:采用最高优先数优先的调度算法(即把处理机分配给优先数最高的进程)和先来先服务算法。
就绪进程获得CPU后都只能运行一个时间片。
用已占用CPU时间加1来表示。
如果运行一个时间片后,进程的已占用CPU时间已达到所需要的运行时间,则撤消该进程,如果运行一个时间片后进程的已占用CPU时间还未达所需要的运行时间,也就是进程还需要继续运行,此时应将进程的优先数减1(即降低一级),然后把它插入就绪队列等待CPU。
每进行一次调度程序都打印一次运行进程、就绪队列、以及各个进程的PCB,以便进行检查。
重复以上过程,直到所要进程都完成为止。
四. 实验步骤:1.、进程调度算法:采用最高优先数优先的调度算法(即把处理机分配给优先数最高的进程)和先来先服务算法。
对每种调度算法都要求打印每个作业开始运行时刻、完成时刻、周转时间、带权周转时间。
2、程序源码结构:struct pcb { /* 定义进程控制块PCB */char name[10];char state;int super;int ntime;int rtime;struct pcb* link;}*ready=NULL,*p;typedef struct pcb PCB;sort(){…} /* 建立对进程进行优先级排列函数*/ check(){…} /* 建立进程查看函数*/input(){…} /* 建立进程控制块函数*/main() /*主函数*/{...input();len=space();while((len!=0)&&(ready!=NULL)){ch=getchar();h++;printf("\n The execute number:%d \n",h);p=ready;ready=p->link;p->link=NULL;p->state='R';check();running();printf("\n resume......");ch=getchar();}printf("\n\n finished.\n");ch=getchar();}3.、实验截图:简单轮转法4、实验结果的分析及说明在操作系统中,由于进程总数多于处理机,它们必然竞争处理机。
计算机操作系统实验---进程调度
操作系统实验报告--进程调度计科02-8 王长青05年4月17日计算机操作系统实验——进程调度一.实验目的进程调度是处理机管理的核心内容。
通过本实验可以加深理解有关进程控制块、进程队列的概念,并体会和了解优先数调度算法的具体实施办法。
二.程序功能本程序使用VC++编译调试,用于实现进程优先数调度的模拟。
主要包含三个模块:1、主界面:用于显示进程调度的过程。
2、数据录入模块:用于获取进程的初始值,其中有三种获取方式,手动输入方式、随即生成方式和从文件中读去数据的方式。
当用户在主窗口中点击“开始”菜单项时即可打开数据录入对话框,用户通过这三种方式之一均可完成数据的录入。
3、进程控制模块:主要实现创建新的进程,就绪队列的管理,完成队列的管理,进程的调度。
三.实验原理(1)本程序采用优先数调度算法对进程进行调度,每个进程可有三个状态,即:就绪状态,运行状态,完成状态。
并假设初始状态为就绪状态。
这三种状态的转换情况如右图:(2)为了便于处理,程序中的某进程运行时间以时间片为单位计算。
各进程的优先数以及进程需运行的时间片数的初始值均由用户给定(通过数据录入模块完成)。
(3)程序通过设置一个定时器来实现时间片的轮转,时间片的大小是1秒,在定时器消息的响应函数中从用户录入的数据中读取一个创建进程,将其加入到就绪队列中,然后进行调度和执行。
在调度函数中,对于遇到优先数一致的情况,采用FIFO策略解决。
(4)在优先数算法中,进程每执行一次,优先数减3,进程还需要运行的时间数减1。
四.详细设计(1)设计进程控制块PCB结构:struct PCB{ int pid; //进程号int pri; //进程优先数int time; //进程所需运行时间int status; // 进程状态 0就绪,1 执行,-1完成};(2)将进程的各种操作封装在类CProMoni中,该类的定义如下:class CProMoni{public:CProMoni();virtual ~CProMoni();void InsertRQ(PCB* p); //将p所指的进程插入到就绪队列中void InsertFQ(PCB* p); //将p所指的进程插入到完成队列中void ProSchedule(); //进程调度函数void ProRun(); //运行函数void Display(CDC* pDC); //以表格形式输出运行过程bool GetFinishFlag();bool OpenLogFile(); //打开日志文件void CloseLogFile(); //关闭日志文件bool WriteLogToFile(); //向日志文件中写入数据private:PCB *m_pRunning; //指向当前运行的进程CPtrList m_readyList; //就绪队列CPtrList m_finishList; //完成队列bool m_finish; //完成标志CString m_LogFileName; //日志文件名CStdioFile m_LogFile; //日志文件public:int m_clock; //时钟序列};(3)主要成员函数的实现:void CProMoni::InsertRQ(PCB* p){ //将p插入到就绪队列中POSITION pre,pos=m_readyList.GetHeadPosition();PCB *q;while(pos!=NULL){pre=pos;q=(PCB*)m_readyList.GetNext(pos);if(q->pri < p->pri){m_readyList.InsertBefore(pre,p);return;}}if(pos==NULL){m_readyList.AddTail(p);}}void CProMoni::ProSchedule(){//进程调度PCB *p;if(m_pRunning==NULL){if(m_readyList.IsEmpty()){m_finish=true;return;}else{p=(PCB*)m_readyList.RemoveHead();m_pRunning=p;}}else{if(!m_readyList.IsEmpty()){p=(PCB*)m_readyList.GetHead();//m_readyList将头节点与当前PCB的权值比较if(p->pri > m_pRunning->pri ){PCB *q=m_pRunning;m_pRunning=(PCB*)m_readyList.RemoveHead();m_pRunning->status=1;q->status=0;InsertRQ(q);}}}}void CProMoni::ProRun(){//运行进程if(!m_finish){if(m_pRunning==NULL){ AfxMessageBox("当前运行的进程不存在!");return;}m_pRunning->pri-=3;m_pRunning->time-=1;{ m_pRunning->time=0;PCB*p=m_pRunning;p->status=-1;InsertFQ(p);m_pRunning=NULL;}}}(4)试图类的主要成员函数:PCB* CProcessView::CreatePCB(){//创建PCBPCB* p=new PCB;p->pid=n+1;p->pri=m_pris[n];p->time=m_times[n];p->status=0;n++;return p;}#include"pritimedlg.h"void CProcessView::OnStart(){ CPriTimeDlg dlg; //定义数据录入对话框dlg.DoModal();if(dlg.m_ok){ m_proTotal=dlg.m_proNum;for(int i=0;i<m_proTotal;i++){ m_pris[i]=dlg.m_pris[i];m_times[i]=dlg.m_times[i];}m_proMoni.OpenLogFile(); //打开日志文件PCB* p=CreatePCB(); //创建新进程m_proMoni.InsertRQ(p); //将新进程插入到就绪队列中m_proMoni.WriteLogToFile(); //写日志文件m_proMoni.ProSchedule(); //进程调度m_start=true; //设置开始标志Invalidate(); //刷新视图m_killTimer=false;SetTimer(1,1000,NULL);//设置定时器}}void CProcessView::OnTimer(UINT nIDEvent){ m_proMoni.m_clock++;m_proMoni.WriteLogToFile();//写日志m_proMoni.ProRun(); //运行进程if(n<m_proTotal){ PCB *p=CreatePCB();//创建新进程m_proMoni.InsertRQ(p);}m_proMoni.ProSchedule();Invalidate();if(m_proMoni.GetFinishFlag()){//若已完成则删除定时器KillTimer(1);m_killTimer=true;AfxMessageBox("演示完毕");}CScrollView::OnTimer(nIDEvent);}五.运行结果(1)数据录入界面:(2)进程调度过程的结果:六、实验总结通过本实验使我对进程的相关概念及进程的优先数调度算法有了更深的理解,使自己在程序设计及编制方面也有了一定的提高。
操作系统实验进程调度

实验三进程调度一. 实验目的加深理解并模拟实现进程(作业)调度算法。
1)熟悉常用的进程调度算法, 如FCFS、SPF、FPF、高响应比优先、时间片轮转;2)结合所学的数据结构及编程知识, 选择三种进程调度算法予以实现。
二. 实验属性该实验为设计性实验。
三. 实验仪器设备及器材普通PC386以上微机四. 实验要求本实验要求2学时完成。
1)本实验要求完成如下任务:2)编程实现单处理机系统中的进程调度, 要求从FCFS、SPF、FPF、高响应比优先、时间片轮转算法中至少选择三个;3)最后编写主函数对所做工作进行测试。
实验前应复习实验中所涉及的理论知识和算法, 针对实验要求完成基本代码编写并完成预习报告、实验中认真调试所编代码并进行必要的测试、记录并分析实验结果。
实验后认真书写符合规范格式的实验报告(参见附录A), 并要求用正规的实验报告纸和封面装订整齐, 按时上交。
五: 实验具体设计此程序模拟了两种调度算法, FCFS和SPF, 首先FCFS就是按照进程的创建顺序依次顺序进行, 流程图为:进程顺序执行SPF:每次都进行循环, 选出在该时间刻运行时间最短的进程优先执行。
1.程序代码具体详解:2.创建一结构体作为进程控制器typedef struct PCB{int ID;char state;int arrivetime;int starttime;int finishtime;int servicetime;struct PCB *next;}pcb;定义全局变量作为计时器int time;//计时器创建进程链表:从txt文件中读取数据, 构造一条不含头结点的单链表void Create_process(){ifstream inFile;inFile.open("test.txt");inFile>>n;inFile.get();int i=0;for (;i<n;i++){p=(pcb *)malloc(sizeof(pcb));inFile>>p->ID;inFile>>p->arrivetime;inFile>>p->servicetime;p->starttime=0;p->finishtime=0;p->state='F';p->next=NULL;if(head==NULL){head=p;q=p;time=p->arrivetime;}if(p->arrivetime < time)time=p->arrivetime;q->next=p;q=p;}若执行FCFS算法, 按顺序遍历链表void fcfs1(){int i;p=head;for(i=0;i<n;i++){if(p->state=='F')q=p;run_fcfs1(q);}p=p->next;}}void run_fcfs1(pcb *p1){time = p1->arrivetime > time? p1->arrivetime:time;p1->starttime=time;printf("\n现在时间: %d,开始运行作业%d\n",time,p1->ID);time+=p1->servicetime;p1->state='T';p1->finishtime=time;printf("ID号到达时间开始运行时间服务时间完成时间\n");printf("%d%10d%12d%12d%12d\n",p1->ID,p1->arrivetime,p1->starttime,p1->servicetime,p 1->finishtime);}若执行SPF算法, 每次都从链表头开始遍历链表, 找出arrivetime<=time并且运行时间最短的节点, 执行该节点进程, 最后再删除该节点。
操作系统实验三

实验三进程调度实验目的1、理解有关进程控制块、进程队列的概念。
2、掌握进程优先权调度算法和时间片轮转调度算法的处理逻辑。
实验内容与基本要求1、设计进程控制块PCB的结构,分别适用于优先权调度算法和时间片轮转调度算法。
2、建立进程就绪队列。
3、编制两种进程调度算法:优先权调度算法P和时间片轮转调度算法R。
实验报告内容1、优先权调度算法和时间片轮转调度算法原理。
2、程序流程图。
3、程序及注释。
4、运行结果以及结论。
1、优先权调度算法和时间片轮转调度算法原理优先权调度算法:当该算法用于作业调度时,系统从后备作业队列中选择若干个优先级最高的,且系统能满足资源要求的作业装入内存运行;当该算法用于进程调度时,将把处理机分配给就绪进程队列中优先级最高的进程投入运行。
分为非抢占式优先级算法和抢占式优先级算法。
时间片轮转调度算法原理:系统将就绪进程按到达的顺序排成一个队列,按FCFS原则,进程调度程序总是选择就绪队列中的第一个进程执行,且只运行一个时间片。
时间用完后,即使此进程并未完成,仍然将处理机分配给下一个就绪的进程,将此进程返回到就绪队列的末尾,等候重新运行。
2、程序流程图。
3、程序及注释#include <stdio.h>#include <stdlib.h>#include <string.h>typedef struct node{char name[20]; /*进程的名字*/int prio; /*进程的优先级*/int round; /*分配CPU的时间片*/int cputime; /*CPU执行时间*/int needtime; /*进程执行所需要的时间*/char state; /*进程的状态,W--就绪态,R--执行态,F--完成态*/int count; /*记录执行的次数*/struct node *next; /*链表指针*/}PCB;PCB *ready=NULL,*run=NULL,*finish=NULL; /*定义三个队列,就绪队列,执行队列和完成队列*/int num;void GetFirst(); /*从就绪队列取得第一个节点*/void Output(); /*输出队列信息*/void InsertPrio(PCB *in); /*创建优先级队列,规定优先数越小,优先级越高*/void InsertTime(PCB *in); /*时间片队列*/void InsertFinish(PCB *in); /*时间片队列*/void PrioCreate(); /*优先级输入函数*/void TimeCreate(); /*时间片输入函数*/void Priority(); /*按照优先级调度*/void RoundRun(); /*时间片轮转调度*/int main(void){char chose;printf("请输入要创建的进程数目:\n");scanf("%d",&num);getchar();printf("输入进程的调度方法:(P/R)\n");scanf("%c",&chose);switch(chose){case 'P':case 'p':PrioCreate();Priority();break;case 'R':case 'r':TimeCreate();RoundRun();break;default:break;}Output();return 0;}void GetFirst() /*取得第一个就绪队列节点*/{run = ready;if(ready!=NULL){run ->state = 'R';ready = ready ->next;run ->next = NULL;}}void Output() /*输出队列信息*/{PCB *p;/*p = ready;*/printf("进程名\t优先级\t时间片\tcpu时间\t需要时间\t进程状态\t计数器\n");p = ready;while(p!=NULL){printf("%s\t%d\t%d\t%d\t%d\t\t%c\t\t%d\n",p->name,p->prio,p->round,p->cputime,p->needtime, p->state,p->count);p = p->next;}p = finish;while(p!=NULL){printf("%s\t%d\t%d\t%d\t%d\t\t%c\t\t%d\n",p->name,p->prio,p->round,p->cputime,p->needtime, p->state,p->count);p = p->next;}p = run;while(p!=NULL){printf("%s\t%d\t%d\t%d\t%d\t\t%c\t\t%d\n",p->name,p->prio,p->round,p->cputime,p->needtime, p->state,p->count);p = p->next;}}void InsertPrio(PCB *in) /*创建优先级队列,规定优先数越小,优先级越低*/{PCB *fst,*nxt;fst = nxt = ready;if(ready == NULL) /*如果队列为空,则为第一个元素*/{in->next = ready;ready = in;}else /*查到合适的位置进行插入*/{if(in ->prio > fst ->prio) /*比第一个还要大(大于等于),则插入到队头*/{in->next = ready;ready = in;}else{while(fst->next != NULL) /*移动指针查找第一个别它小的元素的位置进行插入*/{nxt = fst;fst = fst->next;}if(fst ->next == NULL) /*已经搜索到队尾,则其优先级数最小,将其插入到队尾即可*/{in ->next = fst ->next;fst ->next = in;}else /*插入到队列中*/{nxt = in;in ->next = fst;}}}}void InsertTime(PCB *in) /*将进程插入到就绪队列尾部*/ {PCB *fst;fst = ready;if(ready == NULL){in->next = ready;ready = in;}else{while(fst->next != NULL){fst = fst->next;}in ->next = fst ->next;fst ->next = in;}}void InsertFinish(PCB *in) /*将进程插入到完成队列尾部*/ {PCB *fst;fst = finish;if(finish == NULL){in->next = finish;finish = in;}else{while(fst->next != NULL){fst = fst->next;}in ->next = fst ->next;fst ->next = in;}}void PrioCreate() /*优先级调度输入函数*/{PCB *tmp;printf("输入进程名字和进程所需时间:\n");for(i = 0;i < num; i++){if((tmp = (PCB *)malloc(sizeof(PCB)))==NULL){perror("malloc");exit(1);}scanf("%s",tmp->name);getchar(); /*吸收回车符号*/scanf("%d",&(tmp->needtime));tmp ->cputime = 0;tmp ->state ='W';tmp ->prio = 50 - tmp->needtime; /*设置其优先级,需要的时间越多,优先级越低*/tmp ->round = 0;tmp ->count = 0;InsertPrio(tmp); /*按照优先级从高到低,插入到就绪队列*/}}void TimeCreate() /*时间片输入函数*/{PCB *tmp;int i;printf("输入进程名字和进程时间片所需时间:\n");for(i = 0;i < num; i++){if((tmp = (PCB *)malloc(sizeof(PCB)))==NULL){perror("malloc");exit(1);}scanf("%s",tmp->name);getchar();scanf("%d",&(tmp->needtime));tmp ->cputime = 0;tmp ->state ='W';tmp ->prio = 0;tmp ->round = 2; /*假设每个进程所分配的时间片是2*/tmp ->count = 0;InsertTime(tmp);}void Priority() /*按照优先级调度,每次执行一个时间片*/{int flag = 1;GetFirst();while(run != NULL) /*当就绪队列不为空时,则调度进程如执行队列执行*/{Output(); /*输出每次调度过程中各个节点的状态*/while(flag){run->prio -= 0; /*优先级减去三,若设为0则优先级不变*/run->cputime++; /*CPU时间片加一*/run->needtime--;/*进程执行完成的剩余时间减一*/if(run->needtime == 0)/*如果进程执行完毕,将进程状态置为F,将其插入到完成队列*/{run ->state = 'F';run->count++; /*进程执行的次数加一*/InsertFinish(run);flag = 0;}else /*将进程状态置为W,入就绪队列*/{run->state = 'W';run->count++; /*进程执行的次数加一*/InsertTime(run);flag = 0;}}flag = 1;GetFirst(); /*继续取就绪队列队头进程进入执行队列*/}}void RoundRun() /*时间片轮转调度算法*/{int flag = 1;GetFirst();while(run != NULL){Output();while(flag){run->count++;run->cputime++;run->needtime--;if(run->needtime == 0) /*进程执行完毕*/{run ->state = 'F';InsertFinish(run);flag = 0;}else if(run->count == run->round)/*时间片用完*/{run->state = 'W';run->count = 0; /*计数器清零,为下次做准备*/InsertTime(run);flag = 0;}}flag = 1;GetFirst();}}4、运行结果以及结论。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三进程调度
1.目的和要求
进程调度是处理机管理的核心内容。
本实验要求用C语言编写和调试一个简单的进程调度程序。
通过本实验可以加深理解有关进程控制块、进程队列的概念,并体会和了解优先数和时间片轮转调度算法的具体实施办法。
2.实验内容
①设计进程控制块PCB表结构,分别适用于优先数调度算法和循环轮转调度算法。
②建立进程就绪队列。
对两种不同算法编制入链子程序。
③编制两种进程调度算法:1)优先数调度;2)循环轮转调度
3.实验环境
①PC兼容机
②Windows、DOS系统、Turbo c 2.0
③C语言
4.实验提示
①本程序用两种算法对五个进程进行调度,每个进程可有三个状态,并假设初始状态为就绪状态。
②为了便于处理,程序中的某进程运行时间以时间片为单位计算。
各进程的优先数或轮转时间数以及进程需运行的时间片数的初始值均由用户给定。
③在优先数算法中,优先数可以先取值为50-进程执行时间,进程每执行一次,优先数减3,CPU时间片数加1,进程还需要的时间片数减1。
在轮转算法中,采用固定时间片(即:每执行一次进程,该进程的执行时间片数为已执行了2个单位),这时,CPU时间片数加2,进程还需要的时间片数减2,并排列到就绪队列的尾上。
④对于遇到优先数一致的情况,采用FIFO策略解决。
5.有关实验的改进意见:
在实验操作过程中,发现用户输入的数据量太大且每次用户输入的大多数数据为重复数据,因此考虑采用文件输入方式,用户只需指定特定的输入文件的文件名来输入数据。
另一方面,程序的输出量较大,可以考虑采用文件输出的方式来储存程序的运行结果。
也可以用实时的输出界面来输出程序结果。
6.实验过程
(1)打开vc++,写入代码并编译,无错;
(2)调试源程序,出现一个错误;
(3)查找错误,进行修改,删除两个“sleep(5)”,编译并调试均无错;
(4)按1是优先数算法,根据提示分别输入三个进程名和所需时间;
(5)按2是轮转算法,根据提示分别输入三个进程名和所需时间;
(6)按3退出;。