lcd1602驱动程序
LCD1602驱动程序

1602是课程设计和毕业设计经常用到的显示器,还在愁怎么对1602操作吗?那么看完1602驱动程序,一切变得那么简单。
LCD1602驱动程序://===========LCD1602.H===============#ifndef _LCD1602_H__#define _LCD1602_H__#include<intrins.h>#include"delay.h"//lcd1602管脚定义#define LCD_Data P0 //第7~14脚:D0~D7为8位双向数据线#define Busy 0x80 //用于检测LCM状态字中的Busy标识sbit LCD_RS=P2^0; //寄存器选择位,将LCD_RS位定义为P2.0引脚sbit LCD_RW=P2^1; //读写选择位,将LCD_RW位定义为P2.1引脚sbit LCD_E=P2^2; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚//函数定义声明bit BusyTest(void);//判断液晶模块的忙碌状态void WriteInstruction (unsigned char );//将模式设置指令或显示地址写入液晶模块//void WriteAddress(unsigned char ); //指定字符显示的实际地址void WriteData(unsigned char );//将数据(字符的标准ASCII码)写入液晶模块void CursorFlash(unsigned char,unsigned char); //光标在指定坐标闪烁void InitLcd(void);//初始化LCD1602/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
LCD1602中文资料程序和使用说明
LCD1602中文资料程序和使用说明一、硬件连接和初始化步骤:1.将LCD1602的16个引脚连接到MCU(单片机)的相应引脚上。
其中,VCC和GND分别接到电源正负极,VO接到可调电位器的中间引脚(用于调节背光亮度),RS、RW和E分别接到MCU的IO口上,D0-D7分别接到MCU的8个IO口上。
2.初始化LCD1602的操作包括设置显示模式、显示光标、输入模式等,具体步骤如下:a.将8位数据接口设置为并行输入模式,即设置D0-D3为输入模式。
b.设置显示模式为2行显示,5x8点阵字符,显示器不移动。
c.将显示光标设置为闪烁显示。
d.设置数据输入方式为向右移动,同时字符显示不移动。
e.清除显示内容,将光标位置设置为第一行第一列。
f.打开显示器和光标显示功能。
二、常用函数和操作方法:1. void lcd1602_init( 初始化LCD1602,包括上述硬件连接和初始化步骤。
2. void lcd1602_clear( 清除显示内容。
3. void lcd1602_setCursor(int row, int column) 设置光标位置,row表示行数(从0开始),column表示列数(从0开始)。
4. void lcd1602_print(String str) 在当前光标位置打印字符串str。
5. void lcd1602_shiftDisplayLeft( 将显示内容向左移动一位。
6. void lcd1602_shiftDisplayRight( 将显示内容向右移动一位。
7. void lcd1602_scrollDisplayLeft( 将整个显示内容向左滚动一格。
8. void lcd1602_scrollDisplayRight( 将整个显示内容向右滚动一格。
9. void lcd1602_noCursor( 关闭光标显示。
10. void lcd1602_cursor( 打开光标显示。
LCD1602显示屏的驱动设置及例程
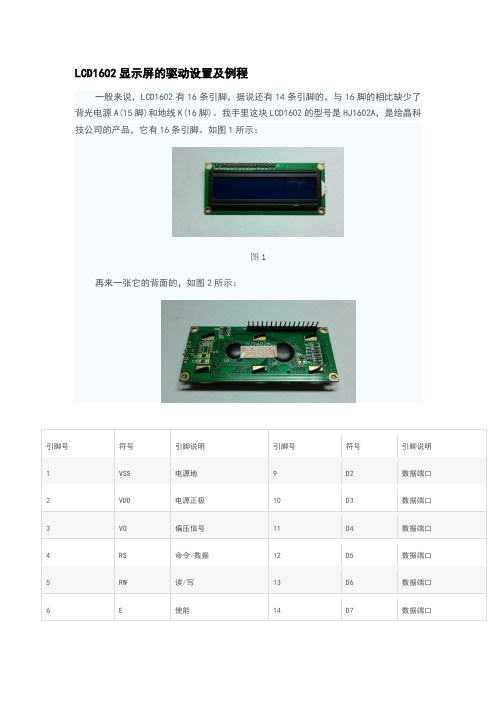
LCD1602显示屏的驱动设置及例程一般来说,LCD1602有16条引脚,据说还有14条引脚的,与16脚的相比缺少了背光电源A(15脚)和地线K(16脚)。
我手里这块LCD1602的型号是HJ1602A,是绘晶科技公司的产品,它有16条引脚。
如图1所示:图1再来一张它的背面的,如图2所示:引脚号符号引脚说明引脚号符号引脚说明1VSS电源地9D2数据端口2VDD电源正极10D3数据端口3VO偏压信号11D4数据端口4RS命令/数据12D5数据端口5RW读/写13D6数据端口6E使能14D7数据端口图2它的16条引脚定义如下:对这个表的说明:1. VSS接电源地。
2. VDD接+5V。
3. VO是液晶显示的偏压信号,可接10K的3296精密电位器。
或同样阻值的RM065/RM063蓝白可调电阻。
见图3。
图34. RS是命令/数据选择引脚,接单片机的一个I/O,当RS为低电平时,选择命令;当RS为高电平时,选择数据。
5. RW是读/写选择引脚,接单片机的一个I/O,当RW为低电平时,向LCD1602写入命令或数据;当RW为高电平时,从LCD1602读取状态或数据。
如果不需要进行读取操作,可以直接将其接VSS。
6. E,执行命令的使能引脚,接单片机的一个I/O。
7. D0—D7,并行数据输入/输出引脚,可接单片机的P0—P3任意的8个I/O口。
如果接P0口,P0口应该接—10K的上拉电阻。
如果是4线并行驱动,只须接4个I/O口。
8. A背光正极,可接一个10—47欧的限流电阻到VDD。
7D0数据端口15A背光正极8D1数据端口16K背光负极9. K背光负极,接VSS。
见图4所示。
图4二.基本操作LCD1602的基本操作分为四种:1. 读状态:输入RS=0,RW=1,E=高脉冲。
输出:D0—D7为状态字。
2. 读数据:输入RS=1,RW=1,E=高脉冲。
输出:D0—D7为数据。
3. 写命令:输入RS=0,RW=0,E=高脉冲。
LCD1602显示屏的驱动设置及例程
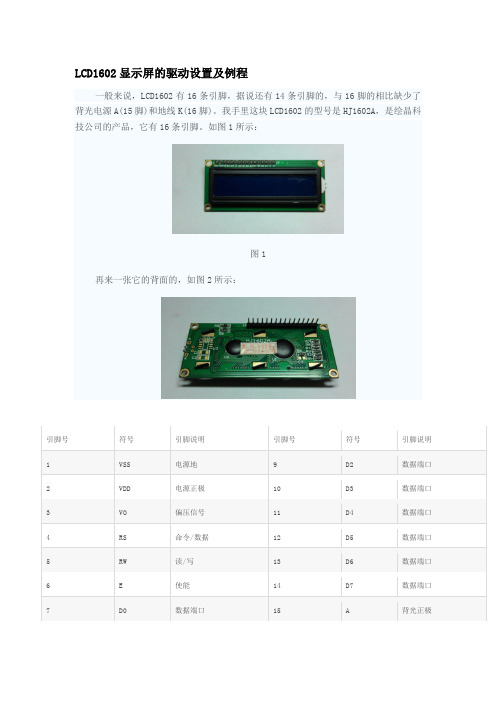
LCD1602显示屏的驱动设置及例程一般来说,LCD1602有16条引脚,据说还有14条引脚的,与16脚的相比缺少了背光电源A(15脚)和地线K(16脚)。
我手里这块LCD1602的型号是HJ1602A,是绘晶科技公司的产品,它有16条引脚。
如图1所示:图1再来一张它的背面的,如图2所示:引脚号符号引脚说明引脚号符号引脚说明1 VSS 电源地9 D2 数据端口2 VDD 电源正极10 D3 数据端口3 VO 偏压信号11 D4 数据端口4 RS 命令/数据12 D5 数据端口5 RW 读/写13 D6 数据端口6 E 使能14 D7 数据端口7 D0 数据端口15 A 背光正极图2它的16条引脚定义如下:对这个表的说明:1. VSS接电源地。
2. VDD接+5V。
3. VO是液晶显示的偏压信号,可接10K的3296精密电位器。
或同样阻值的RM065/RM063蓝白可调电阻。
见图3。
图34. RS是命令/数据选择引脚,接单片机的一个I/O,当RS为低电平时,选择命令;当RS为高电平时,选择数据。
5. RW是读/写选择引脚,接单片机的一个I/O,当RW为低电平时,向LCD1602写入命令或数据;当RW为高电平时,从LCD1602读取状态或数据。
如果不需要进行读取操作,可以直接将其接VSS。
6. E,执行命令的使能引脚,接单片机的一个I/O。
7. D0—D7,并行数据输入/输出引脚,可接单片机的P0—P3任意的8个I/O口。
如果接P0口,P0口应该接4.7K—10K的上拉电阻。
如果是4线并行驱动,只须接4个I/O 口。
8. A背光正极,可接一个10—47欧的限流电阻到VDD。
9. K背光负极,接VSS。
见图4所示。
8 D1 数据端口16 K 背光负极图4二.基本操作LCD1602的基本操作分为四种:1. 读状态:输入RS=0,RW=1,E=高脉冲。
输出:D0—D7为状态字。
2. 读数据:输入RS=1,RW=1,E=高脉冲。
液晶1602 C语言驱动程序

delaytime(10);
}
}
//清屏
void HC1602fullclear()
{
HC1602WriteCmd(0x01);
delaytime(10);
}
/*--------------------------------------------------------------------
{
uint i;
while(n--)
for(i=0;i<200;i++);
}
uint HC1602busy()
{
uchar i;
SysCtlPeripheralEnable(GPIO_PORTA_BASE );
GPIOPinTypeGPIOInput(GPIO_PORTA_BASE , 0xff);
LCD_ESysCtlPeripheralEnable(GPIO_PORTA_BASE );
GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE , 0xff);
return busyflag;
}
void HC1602WriteCmd(uchar uldata) //写命令
函数功能: 在1602液晶显示屏上显示一连串的字符串
输入说明: startline:显示起始行 startrow :显示的起始列
uldata:要显示的字符
返回 值 :
说 明:
--------------------------------------------------------------------*/
LCD1602驱动及显示计数值程序
1.6.3 数据指针设置 1.6.4 其它设置
5
1.7 外形
嵌入式应用软件园,版权所有,请勿转载/销售。
6
嵌入式应用软件园,版权所有,请勿转载/销售。
第 2 章 程序功能
程序中包含 LCM 用到的所有函数:初始化、写指令、写数据、判忙碌、清屏 幕。
单片机外接 2x2 (P3.7,P3.6 与 P3.0,P3.1)矩阵键盘,利用定时器 T0 的定时中断, 查询矩阵键盘。矩阵键盘被命名为 A、B、C、D。对键盘被按下的次数进行计数, 计数值会在 LCM 上显示。
LCM 与单片机的连接
7
嵌入式应用软件园,版权所有,请勿转载/销售。
第 3 章 程序代码
我们的辛勤付出,需要您的肯定,请访问: 嵌入式应用软件园。
;******************************************************************************
9
嵌入式应用软件园,版权所有,请勿转载/销售。
LCALL WRITE_DATA MOV A,#10001010B ;数据指针(显示地址设置) LCALL WRITE_COM MOV A,#3AH LCALL WRITE_DATA ;显示 C: MOV A,#11000000B ;数据指针(显示地址设置) LCALL WRITE_COM MOV A,#43H LCALL WRITE_DATA MOV A,#11000001B ;数据指针(显示地址设置) LCALL WRITE_COM MOV A,#3AH LCALL WRITE_DATA ;显示 D: MOV A,#11001001B ;数据指针(显示地址设置) LCALL WRITE_COM MOV A,#44H LCALL WRITE_DATA MOV A,#11001010B ;数据指针(显示地址设置) LCALL WRITE_COM MOV A,#3AH LCALL WRITE_DATA ;计数的循环,一直执行,永不跳出 START: MOV LCM_P,#10000010B ;数据指针(显示地址设置) MOV R0,#A4 LCALL DISP MOV LCM_P,#10001011B ;数据指针(显示地址设置) MOV R0,#B4 LCALL DISP MOV LCM_P,#11000010B ;数据指针(显示地址设置) MOV R0,#C4 LCALL DISP MOV LCM_P,#11001011B ;数据指针(显示地址设置) MOV R0,#D4 LCALL DISP LJMP START
(例11)LCD1602驱动

//头文件#include <reg51.h>#include <INTRINS.H>//宏定义#define uchar unsigned char#define uint unsigned intsbit LCD_RS=P1^0;//定义引脚 L指令和H数据sbit LCD_RW=P1^1; //H读L写sbit LCD_E=P1^2; //串行时钟输入sbit LCD_PSB =P1^3; /*LCD_PSB脚为12864-12系列的串、并通讯功能切换,我们使用8位并行接口,LCD_PSB=1*/sbit LCD_RST =P1^4; //程序没有用上/*LCD_PSB脚为12864-12系列的串、并通讯功能切换,我们使用8位并行接口,LCD_PSB=1复位信号低电平有效*/#define LCD_Data P0#define Busy 0x80 //用于检测LCD状态字中的Busy标识//函数声明void WriteDataLCD(unsigned char WDLCD); //写数据void WriteCommandLCD(unsigned char WCLCD,BuysC);//写指令unsigned char ReadDataLCD(void);//读数据unsigned char ReadStatusLCD(void); //读状态void LCDInit(void); //初始化void LCDClear(void); //清屏void LCDFlash(void);//闪烁效果void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData);//按指定位置显示一个字符void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData); //按指定位置显示一串字符void DisplayImage (unsigned char code *DData);//图形显示128*64void Delay5Ms(void);void Delay400Ms(void);//写数据void WriteDataLCD(unsigned char WDLCD){//ReadStatusLCD(); //检测忙LCD_RS = 1;LCD_RW = 0;LCD_Data = WDLCD;LCD_E = 0;Delay5Ms();LCD_E = 1;}//写指令void WriteCommandLCD(unsigned char WCLCD,BuysC) //BuysC为0时忽略忙检测{//if (BuysC)//ReadStatusLCD(); //根据需要检测忙LCD_RS = 0;LCD_RW = 0;LCD_Data = WCLCD;LCD_E=0;Delay5Ms();LCD_E=1;}//读数据unsigned char ReadDataLCD(void){LCD_RS = 1;LCD_RW = 1;LCD_E = 0;LCD_E = 0;LCD_E = 1;return(LCD_Data);}//读状态unsigned char ReadStatusLCD(void){LCD_Data = 0xFF;LCD_RS = 0;LCD_RW = 1;LCD_E = 1;while (LCD_Data & Busy); //检测忙信号LCD_E = 0;return(LCD_Data);}//LCM初始化void LCDInit(void){WriteCommandLCD(0x30,1); //显示模式设置,开始要求每次检测忙信号WriteCommandLCD(0x01,1); //显示清屏WriteCommandLCD(0x06,1); // 显示光标移动设置WriteCommandLCD(0x0C,1); // 显示开及光标设置}//清屏void LCDClear(void){WriteCommandLCD(0x01,1); //显示清屏WriteCommandLCD(0x34,1); // 显示光标移动设置WriteCommandLCD(0x30,1); // 显示开及光标设置}//闪烁效果void LCDFlash(void){WriteCommandLCD(0x08,1); //显示清屏Delay400Ms();WriteCommandLCD(0x0c,1); // 显示开及光标设置Delay400Ms();WriteCommandLCD(0x08,1); //显示清屏Delay400Ms();WriteCommandLCD(0x0c,1); // 显示开及光标设置Delay400Ms();WriteCommandLCD(0x08,1); //显示清屏Delay400Ms();}//按指定位置显示一个字符void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData) {if(Y<1)Y=1;if(Y>4)Y=4;X &= 0x0F; //限制X不能大于16,Y不能大于1switch(Y){case 1:X|=0X80;break;case 2:X|=0X90;break;case 3:X|=0X88;break;case 4:X|=0X98;break;}WriteCommandLCD(X, 0); //这里不检测忙信号,发送地址码WriteDataLCD(DData);}//按指定位置显示一串字符,用到void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData) {unsigned char ListLength,X2;ListLength = 0;X2=X;if(Y<1)Y=1;if(Y>4)Y=4;X &= 0x0F; //限制X不能大于16,Y在1-4之内switch(Y){case 1:X2|=0X80;break; //根据行数来选择相应地址case 2:X2|=0X90;break;case 3:X2|=0X88;break;case 4:X2|=0X98;break;}WriteCommandLCD(X2, 1); //发送地址码while (DData[ListLength]>=0x20) //若到达字串尾则退出{if (X <= 0x0F) //X坐标应小于0xF{WriteDataLCD(DData[ListLength]); //ListLength++;X++;Delay5Ms();}}}//图形显示128*64void DisplayImage (unsigned char code *DData){unsigned char x,y,i;unsigned int tmp=0;for(i=0;i<9;){ //分两屏,上半屏和下半屏,因为起始地址不同,需要分开for(x=0;x<32;x++){ //32行WriteCommandLCD(0x34,1);WriteCommandLCD((0x80+x),1);//列地址WriteCommandLCD((0x80+i),1); //行地址,下半屏,即第三行地址0X88WriteCommandLCD(0x30,1);for(y=0;y<16;y++)WriteDataLCD(DData[tmp+y]);//读取数据写入LCDtmp+=16;}i+=8;}WriteCommandLCD(0x36,1); //扩充功能设定WriteCommandLCD(0x30,1);}//5ms延时void Delay5Ms(void){unsigned int TempCyc = 5552;while(TempCyc--);}//400ms延时void Delay400Ms(void){unsigned char TempCycA = 5;unsigned int TempCycB;while(TempCycA--){TempCycB=7269;while(TempCycB--);}}void main(void){//Delay400Ms(); //启动等待,等LCD讲入工作状态LCDInit(); //LCM初始化Delay5Ms(); //延时片刻(可不要)LCD_PSB = 1;//并口输出0为串口输出while(1){LCDClear();DisplayListChar(2,1,"绿盾电子"); //显示字库中的中文数字DisplayListChar(0,2," ");Delay400Ms();Delay400Ms();Delay400Ms();Delay400Ms();LCDFlash(); //闪烁效果}}。
LCD1602四线驱动的方法
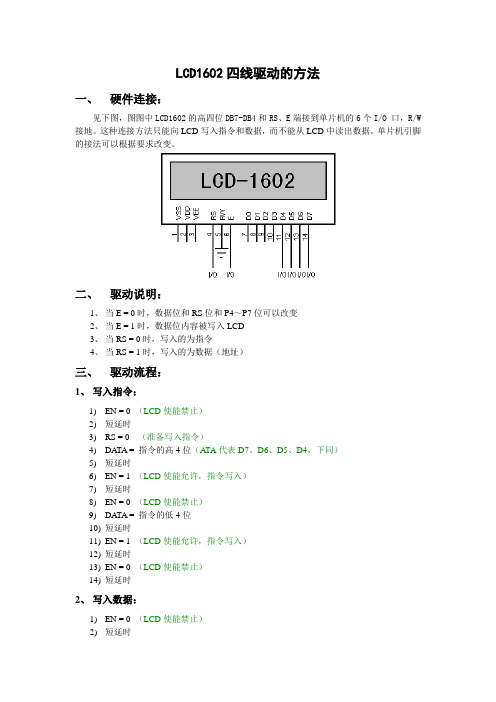
LCD1602四线驱动的方法一、硬件连接:见下图,图图中LCD1602的高四位DB7-DB4和RS、E端接到单片机的6个I/O 口,R/W 接地。
这种连接方法只能向LCD写入指令和数据,而不能从LCD中读出数据。
单片机引脚的接法可以根据要求改变。
二、驱动说明:1、当E = 0时,数据位和RS位和P4~P7位可以改变2、当E = 1时,数据位内容被写入LCD3、当RS = 0时,写入的为指令4、当RS = 1时,写入的为数据(地址)三、驱动流程:1、写入指令:1)EN = 0 (LCD使能禁止)2)短延时3)RS = 0 (准备写入指令)4)DATA = 指令的高4位(A TA代表D7、D6、D5、D4,下同)5)短延时6)EN = 1 (LCD使能允许,指令写入)7)短延时8)EN = 0 (LCD使能禁止)9)DATA = 指令的低4位10)短延时11)EN = 1 (LCD使能允许,指令写入)12)短延时13)EN = 0 (LCD使能禁止)14)短延时2、写入数据:1)EN = 0 (LCD使能禁止)2)短延时3)RS = 1 (准备写入数据)4)DATA = 数据的高4位5)短延时6)EN = 1 (LCD使能允许,数据写入)7)短延时8)EN = 0 (LCD使能禁止)9)DATA = 数据的低4位10)短延时11)EN = 1 (LCD使能允许,数据写入)12)短延时13)EN = 0 (LCD使能禁止)14)短延时四、指令的格式:。
LCD1602.H51单片机LCD1602显示驱动程序
LCD1602.H(51单片机LCD1602显示驱动程序)/*无敌高氯酸修改函数功能delay_ms(time) 延时time毫秒LCD_init() 初始化清空LCD屏LCD_print(x,y,str)在(x,y)坐标上显示str字符0=;0;i--)for (j=0;j<1140;j++);}/************************************************ *********************函数名称:LCD_print()功能描述:显示字符或字符串入口参数:字符或字符串返回值:无************************************************* *********************/void LCD_print(uchar x,uchar y,uchar *str){LCD_gotoxy(x,y);while(*str!='\0'){LCD_wdata(*str);str++;}}/************************************************** *******************函数名称:LCD_wcommand()功能描述:LCD写指令入口参数:uchar lcd_cmd:命令字,uchar busy_f:忙检测标志位返回值:无************************************************* ********************/void LCD_wcommand(uchar lcd_cmd,busy_f){if (busy_f) Rstatus(); //不忙才执行下个程序Port = lcd_cmd;Rw = 0;En = 0;En = 0;En = 1;}/************************************************ *********************函数名称:LCD_wdata()功能描述:LCD写数据入口参数:uchar wdata:所写数据返回值:无************************************************* ********************/void LCD_wdata(uchar wdata){Rstatus();Port = wdata;Rs = 1;Rw = 0;En = 0; //若晶振速度太高可以在这后加小的延时En = 0; //延时}/************************************************ *********************函数名称:LCD_rdata()功能描述:LCD读数据入口参数:无返回值:所读数据************************************************* ********************/uchar LCD_rdata(void){Rs = 1;Rw = 1;En = 0;En = 0;En = 1;return Port;}/************************************************ *********************函数名称:Rstatus()功能描述:LCD读忙状态入口参数:无返回值:若忙,则等待,不忙则返回Port************************************************* ********************/uchar Rstatus(void){Port = 0xFF;Rs = 0;Rw = 1;En = 0;En = 0;En = 1;while (Port & 0x80); //检测忙信号,不忙则退出等待return(Port);}/************************************************ *********************函数名称:LCD_init()功能描述:LCD初始化入口参数:无返回值:无************************************************* ********************/void LCD_init(void){Port = 0;LCD_wcommand(0x38,0); //三次显示模式设置,不检测忙信号delay_ms(3);LCD_wcommand(0x38,0);delay_ms(3);LCD_wcommand(0x38,0);delay_ms(3);LCD_wcommand(0x38,1); //显示模式设置(0X38双行(5*7),0X34单行(5*10)),0X30单行(5*7);开始要求每次检测忙信号LCD_wcommand(0x08,1); //关闭显示LCD_wcommand(0x01,1); //显示清屏LCD_wcommand(0x06,1); // 显示光标移动设置LCD_wcommand(0x0C,1); // 显示开及光标设置}/************************************************ *********************函数名称:LCD_gotoxy()功能描述:定位到(x,y)位置入口参数:x为行(0~1),y为列(0~15)返回值:无************************************************* ********************/void LCD_gotoxy(uchar x, uchar y){x &= 0x1; //限制x不能大于1,y不能大于15y &= 0xF;if(!x) LCD_wcommand(0x80|y,1);else LCD_wcommand(0xC0|y,1);}。
8051单片机驱动LCD1602程序
extern void initTimer0Mode1(void); extern void delayMs(unsigned int uiDlyMs);
#endif
2、LCD 配置头文件 lcd_cfg.h
/*-------------------------------------------------------------------------LCD_CFG.H:LCD 底层驱动配置信息
{
TMOD = TMOD |0x01;
ET0 = 1;
EA = 1;
}
void delayMs(unsigned int uiDlyMs){Βιβλιοθήκη uiDlyCnt = 0;
TL0
= TIMER_LOW;
TH0
= TIMER_HIGH;
TR0
= 1;
while (uiDlyCnt != uiDlyMs) {
unsigned char ucTmpRow, unsigned char ucTmpCol, unsigned char ucPutChar );
#endif
学习交流 by CD 爱吃鱼
学习交流 by CD 爱吃鱼
二、C 文件
1、延迟函数 C 文件 delay.c
/*-------------------------------------------------------------------------DELAY.C:定时器延时函数
学习交流 by CD 爱吃鱼
8051 单片机驱动 LCD1602 程序
一、头文件
头文件主要包含 80C51.h、delay.h 以及 lcd_cfg.h,其中 80C51.h 只是在官方头文件的基础 上作个人习惯上的修改,本例程仅改动了 GPIO 命名方式,这里就不给出 80C51.h 文件内容。 Delay.h 中包含延迟函数相关信息,lcd_cfg.h 为 LCD 底层配置信息,包括引脚分配以及 LCD1602 驱动函数声明。 1、延迟函数头文件 delay.h
LCD1602驱动编程(二)——驱动程序编写
switch( y) {
case 1:LCD_WriteCommand(0x80+x-1);break; //第一行 case2:LCD_WriteCommand(0x80+0x40+x-1); break; //第二行
7. 初始化 void LCD_Initial( void ) { LCD_WriteCommand(0x38); //4 位总线,5*10 点阵字符 LCD_WriteCommand(0x01); //清屏 LCD_WriteCommand(0x06); //显示光标,光标右移 LCD_WriteCommand(0x0c); //开显示 }
8. 滚动字符 Void Character_move( void ) { LCD_WriteCommand(0x18); //字符左移 LCD_WriteCommand(0x1C); //字符右移 }
{
P0=0x00;
RS_SET_C; //数据总线
RW_SET_W; //操作
EN_SET_L;
_NOP( );
//tps1
EN_SET_H; //拉高使能端
while(P0&0x80); } 4. 清屏 Void LCD_Clear( void ) {
Read_busy( ); //判忙 LCD_WriteCommand(0x01) ; DelayMs(5); } 5. 显示字符串
{
Read_busy( ); //判忙
RS_SET_C; //命令总线
RW_SET_R; //写操作
一个旋转编码器+LCD1602的驱动程序
#include<reg51.h>#include <MATH.H>/**********************************宏定义字符串**********************************/#define uchar unsigned char#define LCD_DAT P0 //LCD数据/指令输入端(D7,D6,D5,D4,D3,D2,D1,D0)sbit LCD_RW = P2^5;//LCD读写控制端sbit LCD_RS = P2^6;//LCD指令/数据控制端sbit LCD_E = P2^7; //LCD使能控制端sbit AA = P1^0;//接编码器A端sbit BB = P1^1;//接编码器B端/**********************************任意ms延时函数**********************************/void delayms(uchar count){uchar i,j;for(i = 0; i < count; i++)for(j = 0; j < 120; j++);}/**********************************5ms延时函数**********************************/void delay(void) //延时5ms{uchar a, b;for(b = 19; b > 0; b--)for(a = 130; a > 0; a--);}/**********************************LCD写函数**********************************/void LCD_W(uchar m, uchar com_dat) //m=0:写指令,m=1:写数据{LCD_RS = m;LCD_RW = 0;//写操作LCD_E = 0; //使能禁止LCD_DAT = com_dat; //在指令/数据端置数delay(); //5ms延时LCD_E = 1; //使能允许delay(); //5ms延时LCD_E = 0; //使能禁止}/**********************************LCD初始化函数**********************************/void LCD_INIT(){delay();delay();delay(); //5ms延时LCD_W(0, 0x38); //不检测忙信号delay();LCD_W(0, 0x38); //不检测忙信号delay();LCD_W(0, 0x38); //不检测忙信号LCD_W(0, 0x38); //显示模式LCD_W(0, 0x08); //显示关闭LCD_W(0, 0x06); //光标移动LCD_W(0, 0x0c); //显示开和光标设置}/**********************************LCD清屏函数**********************************/void CLS(){LCD_W(0, 0x01); //清屏}/**********************************LCD定位函数**********************************/void LOCATE(uchar H, uchar L){if(H == 1) //如果是第一行LCD_W(0, 0x80 + L - 1); //定位在第一行第L列elseLCD_W(0, 0x80 + 0x40 + L - 1); //否则定位在第二行第L列}/**********************************LCD显示数值函数**********************************/void LCD(unsigned long num){char n, m;unsigned long ww;if(num > 9) //两位数以上进行处理显示{n = log10(num); //取数值的位数for(m = n; m >= 0; m--) //从高位开始输出{ww = (num / pow(10, m)); //从高位向低位依次取数ww = ww % 10; //取各次的最低位数LCD_W(1, 48 + ww); //输出}}else LCD_W(1, 48 + num); //一位数直接显示LCD_W(1, ' '); //显示空格LCD_W(1, ' '); //显示空格LCD_W(1, ' '); //显示空格}/**********************************主函数**********************************/void main(){uchar kkk, keys, tmp = 1;LCD_INIT();//LCD初始化CLS();//清屏while(1){if(AA == 0)//开始检测是否旋转了开关{delayms(10);//消除抖动if(AA == 0) //确实是旋转了,进行正反转判断{if(BB == 0)//正转,进行正转处理{tmp = tmp * 2;//为了使LED正向递增if(tmp == 0)tmp = 128;//达到最大值,不再加kkk = '+';//正转显示 +}if(BB == 1)//反转,进行反转处理{tmp = tmp / 2;//为了使LED反向递减if(tmp == 0)tmp = 1;//达到最小值,不再减kkk = '-';//反转显示 -}}LOCATE(1,1);//定位第 1 行 1 列LCD(tmp);//显示数值LOCATE(1,5);//定位第 1 行 5 列LCD_W(1, kkk);//显示字符keys = 0;//延时等待计数器while(AA == 0)//等待开关A端复位(断开),防止出现乱加减的现象{delayms(20);//延时等待keys++;//计数器加 1if(keys == 50)break;//达到 1 秒没有复位,开关卡住了,退出继续扫描开关}}P3 = ~tmp; //输出到P0}}。
verilog驱动LCD1602程序

parameter SETCGRAM=10'b0001000000;//设置CGRAM
parameter SETDDRAM1=10'b0010000001;//设置DDRAM
parameter SETDDRAM2=10'b0010000010;//设置DDRAM
state<=SWITCHMODE;end
SWITCHMODE:begin LCD_RS<=0;LCD_RW<=0;LCD_D[7:3]<=5'b00001; //显示状态开关设置0C
LCD_D[2]<=open_display;LCD_D[1]<=open_cur;
LCD_D[0]<=blank_cur;
end
endcase
end
endmodule
下面是testbench代码
`timescale 1ns / 1ps
////////////////////////////////////////////////////////////////////////////////
// Company: HITsz
最近在网上找了很多用verilog驱动LCD1602的程序,但基本没有一个是完美运行,很多论坛所谓大神的代码综合时候一样很多缺陷,要知道每一个warning都有可能是导致最终失败的原因。于是乎只能自己下功夫,找到一个稍微靠谱的开发板配套例程,但是分频器模块编的叫一塌糊涂,主时钟分频后继续分频而且组合时序乱用,通过分频模块重新编写后基本无warning完美运行,仿真功能实现并且下载显示成功,后面附上了我的testbench,本人用的软件为ISE12.2,不过个人感觉quartus应该一样跑,下面是代码,需要在1602显示什么字符自己改显示函数就行,希望对大家有帮助。
LCD1602液晶屏驱动程序

//top module:LCD_1602 module LCD_1602 ( ////////////////////Clock Input//////////////////// CLOCK_50, // 50 MHz ////////////////////LCD Module 16X2//////////////// LCD_ON, // LCD Power ON/OFF LCD_BLON, // LCD Back Light ON/OFF LCD_RW, // LCD Read/Write Select, 0 = Write, 1 = Read
PDF 文件使用 "pdfFactory" 试用版本创建
// Line 1 LCD_LINE1+0: LUT_DATA<=9'h120; LCD_LINE1+1: LUT_DATA<=9'h121; LCD_LINE1+2: LUT_DATA<=9'h122; LCD_LINE1+3: LUT_DATA<=9'h123; LCD_LINE1+4: LUT_DATA<=9'h124; LCD_LINE1+5: LUT_DATA<=9'h125; LCD_LINE1+6: LUT_DATA<=9'h126; LCD_LINE1+7: LUT_DATA<=9'h127; LCD_LINE1+8: LUT_DATA<=9'h128; LCD_LINE1+9: LUT_DATA<=9'h129; LCD_LINE1+10:LUT_DATA<=9'h12a; LCD_LINE1+11:LUT_DATA<=9'h12b; LCD_LINE1+12:LUT_DATA<=9'h12c; LCD_LINE1+13:LUT_DATA<=9'h12d; LCD_LINE1+14:LUT_DATA<=9'h12e; LCD_LINE1+15:LUT_DATA<=9'h12f; //Change Line LCD_CH_LINE: LUT_DATA<=9'h0C0; //Line 2 LCD_LINE2+0: LUT_DATA<=9'h130; LCD_LINE2+1: LUT_DATA<=9'h131; LCD_LINE2+2: LUT_DATA<=9'h132; LCD_LINE2+3: LUT_DATA<=9'h133; LCD_LINE2+4: LUT_DATA<=9'h134; LCD_LINE2+5: LUT_DATA<=9'h135; LCD_LINE2+6: LUT_DATA<=9'h136; LCD_LINE2+7: LUT_DATA<=9'h137; LCD_LINE2+8: LUT_DATA<=9'h138; LCD_LINE2+9: LUT_DATA<=9'h139; LCD_LINE2+10:LUT_DATA<=9'h13a; LCD_LINE2+11:LUT_DATA<=9'h13b; LCD_LINE2+12:LUT_DATA<=9'h13c; LCD_LINE2+13:LUT_DATA<=9'h13d; LCD_LINE2+14:LUT_DATA<=9'h13e; LCD_LINE2+15:LUT_DATA<=9'h13f; default: LUT_DATA<=9'h000; endcase end LCD_Controller u0 ( //Host Side .iDATA(mLCD_DATA), .iRS(mLCD_RS),
1602四线八线驱动程序,非常完整
/*--------------------------------------------------------------*///防止被重复定义#ifndef __LCD1602_8A_H__#define __LCD1602_8A_H__/*--------------------------------------------------------------*///模式选择(条件编译)#define Port_Type_Select 1 //=1, 选择八位数据模式//=0, 选择四位数据模式, LCD高四位接MCU端口高四位#defineInt_Transfer 1 //=1, 允许中断服务函数调用//=0, 不允许中断服务函数调用/*--------------------------------------------------------------*///LCD1602与单片机接口定义#define LCD_IO P0 //P0-0x80,P1-0x90,P2-0xA0,P3-0xB0; sbit LCD_RS = P1^0; //LCD数据/命令选择端(H/L)sbit LCD_RW = P1^1; //LCD 读/写选择端(H/L)sbit LCD_EN = P1^2; //LCD使能控制端/*--------------------------------------------------------------*///工作方式设置#define LCD_DISPLAY8_DOUBLE_LINE LCD_cmd(0x38); //两行显示8-bits#define LCD_DISPLAY8_SINGLE_LINE LCD_cmd(0x30); //单行显示8-bits#define LCD_DISPLAY4_DOUBLE_LINE LCD_cmd(0x28); //两行显示4-bits#define LCD_DISPLAY4_SINGLE_LINE LCD_cmd(0x20); //单行显示4-bits/*--------------------------------------------------------------*///输入方式设置#define LCD_AC_AUTO_INCREMENT LCD_cmd(0x06); //数据读、写操作后,AC 自动加1#define LCD_AC_AUTO_DECREASE LCD_cmd(0x04); //数据读、写操作后,AC自动减1#define LCD_MOVE_ENABLE LCD_cmd(0x07); //数据读、写操作,画面平移#define LCD_MOVE_DISENABLE LCD_cmd(0x06); //数据读、写操作,画面不动/*--------------------------------------------------------------*///设置显示、光标及闪烁开、关#define LCD_DISPLAY_ON LCD_cmd(0x0c); //LCD开显示#define LCD_DISPLAY_OFF LCD_cmd(0x08); //LCD关显示#define LCD_CURSOR_ON LCD_cmd(0x0e); //光标显示#define LCD_CURSOR_OFF LCD_cmd(0x0c); //光标不显示#define LCD_CURSOR_BLINK_ON LCD_cmd(0x0f); //光标闪烁#define LCD_CURSOR_BLINK_OFF LCD_cmd(0x0e); //光标不闪烁#define LCD_GO_HOME LCD_cmd(0x02); //AC=0,光标、画面回HOME位, DDRAM内容不变#define LCD_CLR LCD_cmd(0x01); //LCD清屏, 清除DDRAM, 清除屏幕, 置AC为0, 光标回位?/*--------------------------------------------------------------*///光标、画面移动,不影响DDRAM#define LCD_LEFT_MOVE LCD_cmd(0x18); //LCD显示左移一位#define LCD_RIGHT_MOVE LCD_cmd(0x1c); //LCD显示右移一位#define LCD_CURSOR_LEFT_MOVE LCD_cmd(0x10); //光标左移一位#define LCD_CURSOR_RIGHT_MOVE LCD_cmd(0x14); //光标右移一位/*--------------------------------------------------------------*///LCD1602地址相关/*#define LINE1_HEAD 0x80 //第一行DDRAM起始地址#define LINE2_HEAD 0xc0 //第二行DDRAM起始地址#define LINE1 0 //第一行#define LINE2 1 //第二行#define LINE_LENGTH 16 //每行的最大字符长度(40-DDRAM)/*--------------------------------------------------------------*///函数声明void LCD_busy (void); //检测LCD是否忙void LCD_init (void); //LCD初始化void LCD_cmd (unsigned char cmd); //写入指令void LCD_dat (unsigned char dat); //写入数据void LCD_pos (unsigned char x, unsigned char y); //显示定位void LCD_printc(unsigned char x, unsigned char y, unsigned char c); //定位输出字符void LCD_prints(unsigned char x, unsigned char y, unsigned char *s); //定位输出字符串void LCD_printn(unsigned char x, unsigned char y, unsigned int num); //定位输出16位二进制数字unsigned char LCD_current_addr(void); //读出AC当前地址(DB6~DB0)或忙标志位DB7unsigned char LCD_current_addr_dat(void); //读出AC当前地址的数据//unsigned char LCD_addr_dat(unsigned char x, unsigned char y); //读出AC指定地址的数据//void LCD_pos_CG(unsigned char x, unsigned char *CGRAM_dat); //指定地址(x: 0-7)写入8bytes数据CGRAM/*--------------------------------------------------------------*/ //读出AC当前地址(DB6~DB0)或忙标志位DB7#if Port_Type_Select //选择八位数据模式unsigned char LCD_current_addr(void){unsigned char ac_addr;LCD_EN = 0;LCD_RS = 0; //指令LCD_RW = 1; //读出LCD_IO = 0xff; //端口置为输入方式(P0)LCD_EN = 1;ac_addr = LCD_IO;LCD_EN = 0;return (ac_addr);}#else //选择四位数据模式unsigned char LCD_current_addr(void) {unsigned char ac_addr;LCD_EN = 0;LCD_RS = 0; //指令LCD_RW = 1; //读出LCD_IO |= 0xf0; //端口置为输入方式(P0) LCD_EN = 1;ac_addr = LCD_IO & 0xf0; //高四位LCD_EN = 0;LCD_EN = 1;ac_addr |= LCD_IO >> 4; //低四位LCD_EN = 0;return (ac_addr);}#endif/*--------------------------------------------------------------*/ //检测LCD忙状态#if Int_Transfer //允许中断服务函数调用void LCD_busy(void)unsigned char ac_dat;unsigned char busy_flag;do{ac_dat = LCD_current_addr();busy_flag = ac_dat & 0x80;}while(busy_flag); //=1表示忙, =0表示空闲}#else //不允许中断服务函数调用void LCD_busy(void){unsigned char ac_dat;bit busy_flag;do{ac_dat = LCD_current_addr();busy_flag = (bit)(ac_dat & 0x80);}while(busy_flag); //=1表示忙, =0表示空闲#endif///*--------------------------------------------------------------*/ ////读出AC当前地址的数据//#if Port_Type_Select //选择八位数据模式//unsigned char LCD_current_addr_dat(void)//{//unsigned char addr_dat;//// unsigned char i;//LCD_busy(); //或者检查忙最可靠//// for(i = 0; i < 3; i++) //要连续读出三次才会有效//{//LCD_EN = 0;//LCD_RS = 1; //数据//LCD_RW = 1; //读出//LCD_IO = 0xff; //端口置为输入方式(P0)//LCD_EN = 1;//addr_dat = LCD_IO;//LCD_EN = 0;//}//return (addr_dat);//}//#else //选择四位数据模式//unsigned char LCD_current_addr_dat(void)//{//unsigned char addr_dat;//// unsigned char i;//LCD_busy(); //或者检查忙最可靠//// for(i = 0; i < 3; i++) //要连续读出三次才会有效//{ //LCD_EN = 0;//LCD_RS = 1; //数据//LCD_RW = 1; //读出//LCD_IO |= 0xf0; //端口置为输入方式(P0)//LCD_EN = 1;//addr_dat = LCD_IO & 0xf0; //高四位//LCD_EN = 0;//LCD_EN = 1;//addr_dat |= LCD_IO >> 4; //低四位//LCD_EN = 0;//}//return (addr_dat);//}//#endif/*--------------------------------------------------------------*/ //写入指令#if Port_Type_Select //选择八位数据模式void LCD_cmd(unsigned char cmd){LCD_busy(); //检测忙LCD_RS = 0; //指令LCD_RW = 0; //写入LCD_EN = 1;LCD_IO = cmd; //传指令LCD_EN = 0; //下降沿有效}#else //选择四位数据模式void LCD_cmd(unsigned char cmd) {LCD_busy(); //检测忙LCD_IO &= 0x0f; //清高四位LCD_RS = 0; //指令LCD_RW = 0; //写入LCD_EN = 1;LCD_IO |= cmd & 0xf0; //写高四位LCD_EN = 0; //下降沿有效cmd <<= 4; //低四位移到高四位LCD_IO &= 0x0f; //清高四位LCD_EN = 1;LCD_IO |= cmd & 0xf0; //写高四位LCD_EN = 0; //下降沿有效}#endif/*--------------------------------------------------------------*/ //写入数据#if Port_Type_Select //选择八位数据模式void LCD_dat(unsigned char dat){LCD_busy(); //检测忙LCD_RS = 1; //数据LCD_RW = 0; //写入LCD_EN = 1;LCD_IO = dat; //传数据LCD_EN = 0; //下降沿有效}#else //选择四位数据模式void LCD_dat(unsigned char dat) {LCD_busy(); //检测忙LCD_IO &= 0x0f; //清高四位LCD_RS = 1; //数据LCD_RW = 0; //写入LCD_EN = 1;LCD_IO |= dat & 0xf0; //写高四位LCD_EN = 0; //下降沿有效dat <<= 4; //低四位移到高四位LCD_IO &= 0x0f; //清高四位LCD_EN = 1;LCD_IO |= dat & 0xf0; //写高四位LCD_EN = 0; //下降沿有效}#endif/*--------------------------------------------------------------*///显示定位DDRAMvoid LCD_pos(unsigned char x, unsigned char y){if(y) LCD_cmd(x|0xc0);//y=1第二行显示,y=0第一行显示0<=x<16(40-DDRAM)else LCD_cmd(x|0x80);//数据指针=80+地址码(00H~27H,40H~67H) }///*--------------------------------------------------------------*/////指定地址(x: 0-7)写入8bytes数据CGRAM//void LCD_pos_CG(unsigned char x, unsigned char *CGRAM_dat)//{//unsigned char i;//x <<= 3; //转化为6位数据的高三位,就是x*8;//x |= 0x40;//LCD_cmd(x); //写入地址//for(i = 0; i < 8; i++)//LCD_dat(CGRAM_dat[i]); //写入数据//}///*--------------------------------------------------------------*/////读出AC指定地址的数据//unsigned char LCD_addr_dat(unsigned char x, unsigned char y) //{//unsigned char addr_dat;//LCD_pos(x, y); //定位//addr_dat = LCD_current_addr_dat(); //读出数据//return (addr_dat);//}/*--------------------------------------------------------------*///定位输出字符void LCD_printc(unsigned char x, unsigned char y, unsigned char c) {LCD_pos(x, y);LCD_dat(c);}/*--------------------------------------------------------------*///定位输出字符串void LCD_prints(unsigned char x, unsigned char y, unsigned char *s) {LCD_pos(x, y);while(*s){LCD_dat(*s);s++;}}/*--------------------------------------------------------------*///定位输出16位二进制数字// 0<= num <65536void LCD_printn(unsigned char x, unsigned char y, unsigned int num) {char i=0;unsigned char ii=0;unsigned char dat[6]={0,0,0,0,0,0};for(i = 0; i < 6; i++) dat[i] = 0; i = 0; //初始化数据while(num / 10) //拆位{dat[i] = num % 10; //最低位num /= 10; i++;}dat[i] = num; //最高位ii = i; //保存dat的位数for(; i >= 0; i--) dat[i] += 48; //转化成ASCIILCD_prints(x, y, " "); //清显示区域LCD_pos(x, y);for(i = ii; i >= 0; i--) LCD_dat(dat[i]); //输出数字字符///*--------------------------------------------------------------*/////定位输出32位二进制数字//// 0<= num <65536//void LCD_print_long(unsigned char x, unsigned char y, unsigned long num)//{////char i;//unsigned char ii;//unsigned char dat[11];//for(i = 0; i < 11; i++) dat[i] = 0; i = 0; //初始化数据//while(num / 10) //拆位//{//dat[i] = num % 10; //最低位//num /= 10; i++;//}//dat[i] = num; //最高位//ii = i; //保存dat的位数//for(; i >= 0; i--) dat[i] += 48; //转化成ASCII//LCD_prints(x, y, " "); //清显示区域//LCD_pos(x, y);//for(i = ii; i >= 0; i--)// LCD_dat(dat[i]); //输出数字字符//}/*--------------------------------------------------------------*/ //LCD初始化void LCD_init(void){#if Port_Type_Select //选择八位数据模式LCD_DISPLAY8_DOUBLE_LINE //设置LCD为16X2显示,5X7点阵,八位数据接口#elseLCD_DISPLAY4_DOUBLE_LINE //设置LCD为16X2显示,5X7点阵,四位数据接口#endifLCD_AC_AUTO_INCREMENT //LCD显示光标移动设置(光标地址指针加1,整屏显示不移动)LCD_DISPLAY_ON //LCD开显示及光标设置(光标不闪烁,不显示"_")LCD_CLR //清屏}/*--------------------------------------------------------------*/ #endif。
LCD1602液晶显示
实验十一、LCD1602液晶显示一、实验目的1、熟悉Protuse仿真软件的使用;2、熟悉利用Keil软件编译程序的过程;3、了解LCD1602液晶显示器的工作原理及学会翻阅芯片的数据手册;4、掌握LCD1602液晶显示器的驱动流程和编程方法。
二、实验内容LCD1602液晶显示器的驱动流程:1、写操作(写指令(RS=0)和写数据(RS=1))1.1、写指令函数write_cmd(u8 cmd)1.2、写数据函数write_data(u8 dat)2、初始化液晶2.1、归位write_cmd(0x02);2.2、设置输入方式write_cmd(0x06);2.3、控制显示开关write_cmd(0x0c);2.4、功能设置write_cmd(0x38);2.5、清屏write_cmd(0x01);3、写显示的数据3.1、选择显示的行write_cmd(0x80);3.2、写显示的数据write_data(‘I’);Protuse 仿真环境的搭建:1、在Pick Devices中查找所需要的器件AT89C51、LM061L、RESPACK-8;同时搭建晶振电路和复位电路。
2、将其按照(图11.1)进行相连;3、将生成的.hex文件导入AT89C51芯片中进行仿真实验。
三、实验过程Keil软件程序:#include <reg52.h> //此文件中定义了单片机的一些特殊功能寄存器typedef unsigned char u8; //对数据类型进行声明定义typedef unsigned int u16;#define DATA P0sbit rs = P2^1; //寄存器选择变量sbit rw = P1^5; //读写操作选择变量sbit en = P1^6; //工作使能变量void delay(u16 num) //延时函数{u16 x,y;for (x=num; x>0; x--)for(y=110; y>0; y--);}void write_cmd (u8 cmd) //写指令函数{rs = 0; //指令寄存器rw = 0; //写操作DATA = cmd;delay(5);en = 1;delay(5);en = 0;}void write_data (u8 dat) //写数据函数{rs = 1; //数据寄存器rw = 0; //写数据DATA = dat;delay(5);en = 1;delay(5);en = 0;}void lcd_init (void) //液晶初始化函数{write_cmd(0x02); //归位write_cmd(0x06); //输入方式,AC自动加1,画面不动write_cmd(0x0c); //显示开关开,光标开,闪烁关write_cmd(0x38); //功能设置,8位数据接口,两行显示,5*7点阵字符write_cmd(0x01); //清屏}int main (void){ u8 *string="I Love You";u8 n=0;u8 dp=0xc0; //第二行初位信息rw = 0;rs = 0;en = 0;lcd_init();write_cmd(0x80); //第一行初位信息write_data('I');write_data(' ');write_data('L');write_data('O');write_data('V');write_data('E');write_data(' ');write_data('D');write_data('P');write_data('J');write_cmd(dp); //第二行while(*string!='\0'){ write_cmd(dp);dp++;write_data(*string);string++;n++;}while(1);}Protuse 仿真:图11.1 LCD液晶显示实验四、实验现象在AT89C51芯片中下载程序后LCD液晶显示屏上显示”I lOVE DPJ”和”I Love You”两行字符。
LCD1602 C语言驱动程序

#define LCD_DELAY_TIME 40
#define DATA_MODE 0x38
#define OPEN_SCREEN 0x0C
#define DISPLAY_ADDRESS 0x80
#define CLEARSCREEN LCD_en_command(0x01)
void delay_nms(unsigned int n);//delay function
/********************************************************************/
void main(void)
{
LCD_init();
void LCD_en_dat(unsigned char dat)
{
LCDIO=dat;
LCD1602_RS=HIGH;
LCD1602_RW=LOW;
LCD1602_EN=LOW;
LCD_delay();
LCD1602_EN=HIGH;
}
/********************************************************************/
void LCD_write_string(unsigned char X,unsigned char Y,unsigned char *s);//write lcd string function
void LCD_init(void);//lcd initize function
/********************************************************************/
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
/*------------------------------------------------
lcd1602写入命令函数
------------------------------------------------*/
bit LCD_Check_Busy(void)
{
bit result; //修改了判忙函数
DataPort= 0xFF;
RS=0;
RW=1;
EN=1;
_nop_();
result=(bit)(DataPort & 0x80);
EN=0;
{
LCD_Write_Com(0x80 + x); //表示第一行
}
else //否则就是第二行,就是必须y==2
{
LCD_Write_Com(0xC0 + x); //表示第二行
}
while (*s)
#include <reg52.h>
#include<intrins.h>
/*----------------------------------------------------
lcd1602
----------------------------------------------------*/
0~255 这里使用晶振12M,精确延时请使用汇编
------------------------------------------------*/
void DelayMs(unsigned char t)
{
while(t--)
{
//大致延时1mS
DelayUs2x(245);
/*----------------------------------------------------
lcd1602
----------------------------------------------------*/
/*------------------------------------------------
sbit RS = P2^7; //定义端口 ,LCD1602的4脚
sbit RW = P2^6; //定义端口 ,LCD1602的5脚
sbit EN = P2^5; //定义端口 ,LCD1602的6脚
#define DataPort P0//定义数据端口 程序中遇到DataPort 则用P0 替换
RS=1;
RW=0;
EN=1;
DataPort= Data;
_nop_();
EN=0;
}
/*------------------------------------------------
lcd1602清屏函数
------------------------------------------------*/
void DelayUs2x(unsigned char t)
{
while(--t);
}
/*------------------------------------------------
mS延时函数,含有输入参数 unsigned char t,无返回值
unsigned char 是定义无符号字符变量,其值的范围是
------------------------------------------------*/
void LCD_Pos(unsigned char x,unsigned char y) //x代表列,y代表行
{
if (y == 1) //y==1代表显示在LCD1602第一行
{
LCD_Write_Data( *s); //写入字符
s ++; //指向下一个地址
}
}
/*------------------------------------------------
光标定位函数
LCD_Write_Com(0x38);
DelayMs(5);
LCD_Write_Com(0x38);
DelayMs(5);
LCD_Write_Com(0x38);
LCD_Write_Com(0x08); /*显示关闭*/
LCD_Write_Com(0x01); /*显示清屏*/
lcd1602写入数据函数
------------------------------------------------*/
void LCD_Write_Data(unsigned char Data)
{
while(LCD_Check_Busy()); //忙则等待
LCD_Write_Com(0x06); /*显示光标移动设置*/
DelayMs(5);
LCD_Write_Com(0x0C); /*显示开及光标设置*/
}
lcd1602初始化函数
------------------------------------------------*/
void LCD_Init(void)
{
LCD_Write_Com(0x38); /*显示模式设置*/
DelayMs(5);
------------------------------------------------*/
void LCD_Write_String(unsigned char x,unsigned char y,unsigned char *s) //x代表列,y代表行
{
if (y == 1) //y==1代表显示在LCD1602第一行
void LCD_Clear(void)
{
LCD_Write_Com(0x01); //写指令
DelayMs(5); //延时,便于执行完成
}
/*------------------------------------------------
lcd1602写入字符串函数
void LCD_Write_Com(unsigned char com)
{
while(LCD_Check_Busy()); //忙则等待
RS=0;
RW=0;
EN=1;
DataPort= com;
_nop_();
EN=0;
}
/*------------------------------------------------
DelayUs2x(245);
}
}
/*-------------------
lcd1602判忙函数
------------------------------------------------*/
uS延时函数,含有输入参数 unsigned char t,无返回值
unsigned char 是定义无符号字符变量,其值的范围是
0~255 这里使用晶振12M,精确延时请使用汇编,大致延时
长度如下 T=tx2+5 uS
------------------------------------------------*/
{
LCD_Write_Com(0x80 + x); //表示第一行
}
else
{
LCD_Write_Com(0xC0 + x); //表示第二行
}
}
/*------------------------------------------------