工业机器人专用减速器的设计(含全套CAD图纸)
减速器结构及参考图例
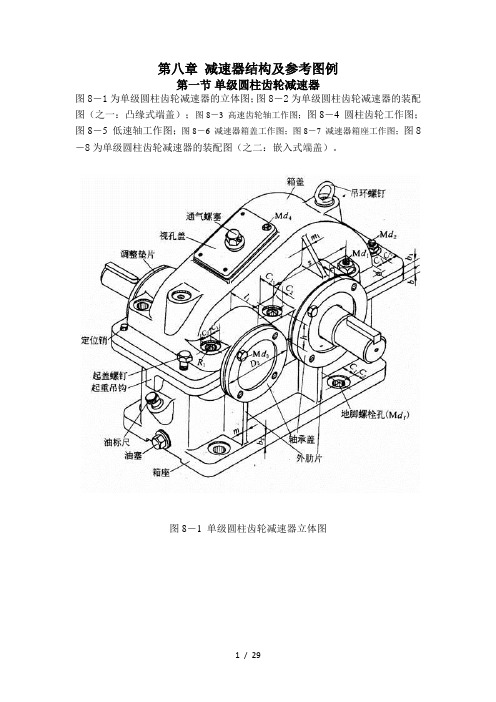
第八章减速器结构及参考图例第一节单级圆柱齿轮减速器图8-1为单级圆柱齿轮减速器的立体图;图8-2为单级圆柱齿轮减速器的装配图(之一:凸缘式端盖);图8-3 高速齿轮轴工作图;图8-4 圆柱齿轮工作图;图8-5 低速轴工作图;图8-6 减速器箱盖工作图;图8-7 减速器箱座工作图;图8-8为单级圆柱齿轮减速器的装配图(之二:嵌入式端盖)。
图8-1 单级圆柱齿轮减速器立体图图8-2 单级圆柱齿轮减速器装配图(之一)图8-4 圆柱齿轮工作图图8-5 低速轴工作图图8-8为单级圆柱齿轮减速器的装配图(之二)第二节单级圆锥齿轮减速器图8-9为单级圆锥齿轮减速器的立体图;图8-10为单级圆锥齿轮减速器的装配图;图8-11为单级圆锥齿轮减速器结构图(立式);图8-12 圆锥齿轮工作图。
图8-9 单级圆锥齿轮减速器立体图图8-10为单级圆锥齿轮减速器的装配图图8-11为单级圆锥齿轮减速器结构图(立式)图8-12 圆锥齿轮工作图第三节单级蜗杆减速器图8-13为单级蜗杆减速器的立体图;图8-14为单级蜗杆减速器的装配图;图8-15为单级蜗杆减速器装配图(有散热片);图8-16 蜗杆工作图,图8-17 蜗轮工作图。
图8-13 单级蜗杆减速器立体图图8-14 蜗杆减速器的装配图图8-15 单级蜗杆减速器装配图(有散热片)图8-16 蜗杆工作图图8-17 蜗轮工作图第四节双级圆柱齿轮减速器图8-18双级圆柱齿轮减速器立体图;图8-19为两种形式的双级圆柱齿轮减速器装配图;图8-20双级圆柱齿轮减速器装配图(焊接结构)。
图8-18 双级圆柱齿轮减速器立体图图8-19双级圆柱齿轮减速器装配图图8-20双级圆柱齿轮减速器装配图第五节圆锥-圆柱齿轮减速器图8-21圆锥-圆柱齿轮减速器立体图;图8-22圆锥-圆柱齿轮减速器装配图(之一);图8-23圆锥-圆柱齿轮减速器装配图(之二)。
图8-21 圆锥-圆柱齿轮减速器立体图图8-22圆锥-圆柱齿轮减速器装配图(之一)图8-23圆锥-圆柱齿轮减速器装配图(之二)。
机械课程设计-减速器-(内含CAD图)教学教材

机械课程设计-减速器-(内含C A D图)设计题目带式运输机的单级直齿圆柱齿轮减速器\院(系) 专业班级学号设计人指导教师完成日期年月日免下载券筘筘2667529482Cad图嵌入在word中点击图片进入CAD编辑,2007版目录【内嵌文件提取方法:下载完整版DOC个时候打开,双击DOC文件内内嵌的文件的图标可直接编辑(需安装了AUTOCAD,编辑时就可选择另存文件到….)】机械设计基础课程设计说明书下面为3个内嵌DWG格式文件:分别为轴/齿轮/装配图目录第一章课题题目及主要技术参数说明 (2)1.1课题题目 (2)1.2主要技术参数说明 (2)第二章减速器结构选择及相关性能参数计算 (4)免下载券筘筘26675294822.1 减速器结构 (4)2.2 电动机选择 (4)2.3 传动比分配 (5)2.4 动力运动参数计算 (5)第三章三角带传动设计 (7)3.1确定计算功率 (7)3.2确定V带型号 (7)3.3确定带轮直径 (7)3.4确定带长及中心距 (7)3.5.验算包角 (8)3.6.确定V带根数Z (8)3.7.确定作用在轴上的压力F Q (8)第四章齿轮的设计计算 (8)4.1 齿轮材料和热处理的选择 (8)4.2 齿轮几何尺寸的设计计算 (9)4.2.1 按照接触强度初步设计齿轮主要尺寸 (9)4.2.2 齿轮弯曲强度校核 (11)4.2.3 齿轮几何尺寸的确定 (11)4.3 齿轮的结构设计 (12)第五章轴的设计计算 (14)5.1 轴的材料和热处理的选择 (14)5.2 轴的设计计算 (14)5.2.1 按照扭转强度初步设计轴的最小直径 (14)5.2.2 轴的结构设计 (14)5.2.3确定轴各段直径和长度 (15)5.2.4按扭矩初估轴径 (15)第六章轴承、键和联轴器的选择 (19)6.1 轴承的选择及校核 (19)6.2 键的选择计算及校核 (19)6.3 联轴器的选择 (20)第七章减速器润滑、密封及附件的选择确定以及箱体主要结构尺寸的计算及装配图 (21)7.1 润滑的选择确定 (21)7.1.1润滑方式 (21)7.1.2润滑油牌号及用量 (21)7.2密封形式 (21)7.3减速器附件的选择确定 (22)7.4箱体主要结构尺寸计算 (22)参考文献 (23)第一章课题题目及主要技术参数说明1.1课题题目带式输送机传动系统中的减速器。
二级减速器课程设计(装配图 原理图 CAD图 计算图)-课程设计

二级减速器课程设计(装配图+原理图+CAD图+计算图)-课程设计二级减速器课程设计(装配图+原理图+CAD图+计算图) 一、电动机的选择:1、选择电动机的类型:按工作要求和条件,选用三机笼型电动机,封闭式结构,电压380V,Y型。
2、选择电动机容量:电动机所需的功率为:(其中:为电动机功率,为负载功率,为总效率。
)传动效率分别为:联轴器的效率滚动轴承效率闭式齿轮传动效率开式齿轮传动效率 0.95工作机效率效率传动装置的总效率应为组成传动装置的各部分运动副效率只之乘积,即:负载功率:折算到电动机的功率为:3、确定电动机转速:工作机的转速为:查表得:二级圆梯形齿轮减速器传动比 ,一级开式圆柱齿轮传动的传动比为:即为减速器的总传动比,所以电机的可选范围为:。
则符合这一范围的同步转速有1000 、1500 和3000 r/min.所以可供选择的的电机有:序号电动机型号额定功率满载功率堵转转矩最大转矩质量(kg)额定转矩额定转矩1 Y802-2 1.1 2850 2.2 2.3 172 Y90S-4 1.1 1400 2.3 2.3 223 Y90L-6 1.1 910 2.0 2.0 25综合考虑电动机和传动装置的尺寸、重量和减速器的传动比,可以选择的电机型号为Y90S-4,其主要性能如上表的第2种电动机。
二、确定传动装置的总传动比和分配传动比1、减速器的总传动比为:2、分配传动装置传动比:(式中为外部开式齿轮的传动比,为减速器的传动比)。
的可取范围为,取 =5 则减速器的传动比3、按展开式布置。
考虑润滑条件,为使两级大齿轮直径相近,可由展开式曲线查得,则。
4、计算各轴的动力和动力参数(1)各轴的转速?轴:?轴:?轴:VI轴:(2)各轴的输入功率?轴:?轴:?轴:VI轴:V轴:?-IV轴的输出功率则分别为输入功率乘轴承效率0.98.(3)各轴的转矩电动机的输出转矩:?轴:?轴:?轴:IV轴:?-IV轴的输出转矩则分别为各轴的输入输入转矩乘轴承效率0.98.运动动力参数计算结果整理于下表:轴名功率 P/KW 转距T/N*M 转速n r/min 转动比i 效率输入输出输入输出电机轴 1.05 7.16 1400 1 0.99?轴 1.04 1.02 7.09 6.95 1400?轴 0.99 0.97 38.48 37.71 245.18 5.71 0.95?轴 0.94 0.92 137.90 135.14 65.03 3.77 0.95IV轴 0.88 0.86 641.92 629.08 13.01 5 0.93V轴 0.87 0.85 622.79 616.50 13.01 1 0.97三、传动零件的设计计算1减速器开式齿轮的设计算传动比为:i=5,输入转速为:65.03 r/min,传递功率为:p=1.96KW,每天工作16h,寿命为10年(每年按250工作计算)确定材料与热处理方式1〃确定材料与热处理方式考虑到该齿轮传动无特殊要求,出于等强度和抗胶合的考虑,大小齿轮应有适当的硬度差。
减速机设备图纸

减速机械(一)SEWK、F、R、S型螺旋伞齿轮减速机CADK型37 47 57 67 77 87 97107 127 137F型37 47 57 67 77 87 97 107R型17 27 37 47 57 67 77 87 97 107 137 147S型37 47 57 67 77 87 97 现货4DBY二级硬齿面圆锥圆柱齿轮减速器南高齿DBY-160 180 200 224 250 280315DBY-355 400 450 500 560 共12套5 PM LQ JZQ技术性能及选用说明书6渐开线圆柱齿轮减速器共68套JZQ-250 350 400 500 650750 850 1000ZQ-250 350 400 500 650 750850 1000PM-250 350 400 500 650 750850 1000LQ-250 350 400 500 650 750850 1000ZD-10 15 20 25 30 35 4045 50 60 70ZD-800 ZD-900 ZD-1000ZD-1200 ZD-1600ZL-25 35 42.5 50 60 65 70 7585 100 115 130ZS-50 65 75 82.5 95 110125 145 165单级硬齿面圆柱齿轮减速器重型机械研究所ZDY-80 100 125 160 200 250 280315 355 400 450 500 560 两级硬齿面圆柱轮减速器ZLY-112 125 140 160 180 200 224 250 280 315 355 400 450 500 560 630 710三级硬齿面圆柱齿轮减速器重型机械研究所ZSY-160 180 200 224 250 280 315355 400 450 500 560 630 710十四套全套图纸型号规格及名称每套单价序号全套图纸型号规格及名称每套单价DCY三级硬齿面圆锥圆柱齿轮减速器DCY-160 180 200 224 250 280 315 355400 450 500 560 630 710 800 共15套2ZQD350 400 500 650 800 1000大速比减速器江苏现货21JB1799-76NGW型行星齿轮减速器22JB3722-84NGW-Z型星齿轮减速器TD-610型减速机(皮带输送机专用)23JB3723-84NGW-S型行星齿轮减速器ZHQ-35型减速器大连起重运输机械厂24JB3724-84NGW-L型行星齿轮减速器ZH型减速器上海起重运输机械厂ZH-250 ZH-350 ZH-400 三套25NGW行星齿轮减速器承载能力计算书26NGW行星齿轮减速器几何计算书圆弧圆柱齿轮减速器共29套ZDH-10 15 20 25 30 35 40 45 50 60 70ZLH-25 42.5 60 65 75 85 100 115 130ZQH-25 30 35 40 50 65 75 85 100 27NGW行星齿轮减速器编制说明书28NGW行星齿轮减速器选用说明书29NGW行星齿轮减速器一机部起重研究所(全系列共27套)NGW11 21 31 41 51 61 71 81 91 101 111 121单级减速机标准汇编圆弧圆柱蜗杆减速器共24套WHX-12 16 20 25 28 32 36 40WHS-12 16 20 25 28 32 36 40WHC-12 16 20 25 28 32 36 40NGW42 52 62 72 82 92 102 112 122双级NGW73 83 93 103 113 123 三级3JB2982-81摆线针轮减速机31摆线针轮减速机说明书L315 L400 L600减速机上海起重运输机械厂32BWD2212摆线针轮减速机上海B315 B400减速器天津减速机厂33BLD2212摆线针轮减速机上海全套图纸型号规格及名称每套单价序号全套图纸型号规格及名称每套单价X型摆线针轮减速机天津减速机厂X2 X3 X4 X5 X6 X7 X8 X9X10 X11 X63 X74 X84 X95 X106 37BW BL摆线针轮减速机(共16套)天津减速机厂BW BL BWY BLY-15 18 22 27 33 39 455565 2215 2715 3322 3922 4527 5527 6533BW-5摆线针轮减速机泰兴减速机厂38FSX630/1000、450力距减速机BW、BL卧式摆线针轮减速机BW-3 4 5 6 7 8 9 共七套BL-3 4 5 6 7 8 9 共七套39LY25-65A蜗轮减速机4WS125-40-I蜗轮减速机摆线针轮减速机上海BW BL BWY BLY-15 18 22 27 3941MBY710 MBY800边缘传动磨机齿轮箱CAD现货426JS(Ⅱ)-110减速机(刮板输送机用)太原煤机减速机械(二)ZJ型装式减速机马鞍山传动机械厂ZJ(63 100 160 250 400630)六套789 WX WS WD蜗轮减速机共23套WX-80 100 120 150 180 360WS-80 100 150 180 210 360WD-63 72 80 100 102 120 130 150 180 300 360WSJ-12 18蜗轮减速机合肥矿山机械厂WXJ-12 18蜗轮减速机合肥矿山机械厂G1 G2 G3蜗轮减速机三套1CT536-23 T540-14A80蜗轮减速机鞍山A型蜗轮减速机共14套A100 A120 A117.5 A150 A160 A180 A250A310 A350 A420 A480 A540 A60 A800 11手动蜗轮箱电动蜗轮箱二套12WDS齿轮蜗轮三级减速机速比1:583213传动件技术标准汇编(3册)全套图纸型号规格及名称每套单价序号全套图纸型号规格及名称每套单价ZSC~400立式减速器洛阳矿山机器厂270.5-0.6KW变速箱上海仪表机床厂QJ型外啮合渐开线圆柱齿轮减速器共56套QJR-200 236 280 335 400 450 500 560 630 800 280.6-0.8K变速箱上海红旗机械厂29SPT5A4-1无级变速器宁波渔业机械厂QJR-D170 D236 D280 D335 D400 D450 D500 D630 D800QJS-200 236 280 335 400 450 500 560 630 800QJS-D170 D236 D280 D335 D400 D450 D500 D630 D800QJRS-200 236 280 335 400 450 500 560 630 800QJRS-D236 D280 D335 D400 D450 D500 D560 D630 D800QJ-L200 QJ-L236 QJ-L280 QJ-L355 QJ-L400 各800元3SPT-6无级变速机31STJ型06 08 12 16索道减速机四套32WPY输出轴向上圆机座蜗轮减速机WPY-12 15 21 25 30 3633NN08 NN10少齿差减速机上海34JTC501 502齿轮减速箱上海ZSC-600立式减速器洛阳矿山机器厂35JTC561 562齿轮减速箱上海ZSC型立式减速器大连起重机器厂ZSC-320 350 400 500 600 650 750 80036JTC751 752齿轮减速箱上海37JTC901 902齿轮减速箱上海ZSC立式套装减速器大连起重机器厂ZSC-400 500 600 650 800 五套38JS2.0 JS3.0减速器试验台二套39IZHLR115 130 150 170型减速器四套J61 J64 J73 J79 J80J100型减速器40 QJ-T圆柱套装式起重机减速器QJ-T型140 170 200 236 280 335 4005.5KW钢球无级变速器上海138********wang。
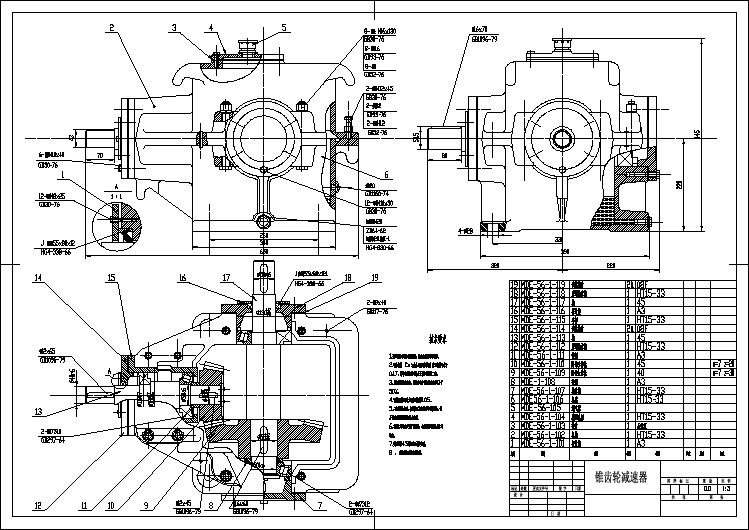
典型锥齿轮减速器设计cad详细总装配图(含技术要求)
工业机器人结构设计【含全套CAD图纸和WORD说明书】

工业机器人结构设计00(陕理工机械工程学院机自专业000班,陕西汉中 723003)指导教师:000[摘要]本文简要介绍了工业机器人的概念,机器手硬件和软件的组成,即plc控制的机械手的系统工作原理,机械手各个部件的整体尺寸设计,plc控制的特点.本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
设计了机械手的手臂结构.利用可编程序控制器对机械手进行控制,选取了合适的plc型号,根据机械手的工作流程制订了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
[关键词]工业机器人机械手The Industrial robot design000(Grade00,Class00,Major Mechanical Design,Manufacturing and Automation,415Dept。
,Shaanxi University of Technology,Hanzhong 723003,Shaanxi)Tutor:000Abstract This paper introduces the concept of the composition of industrial robots,robot hardware and software, system working principle that plc manipulator control, the overall size of the various components of the robot design, plc control characteristics. In this paper,the robot overall program design,to determine the coordinates of the robot forms and degrees of freedom to determine the technical parameters of the robot. While the design of the hand gripping structure of the robot type,the design of the structure of the robot wrist,the wrist required to calculate the rotation of the driving torque and driving torque of the rotary cylinder。
二级圆柱齿轮减速器(CAD图纸6张).
目录概述 (2)设计任务书 (3)第1章传动方案的总体设计 (4)1.1传动方案拟定 (4)1.2电动机的选择 (5)1.3 传动比的计算及分配 (5)1.4 传动装置运动、动力参数的计算 (6)第2章减速器外传动件(三角带)的设计 (7)2.1功率、带型、带轮直径、带速 (7)2.2确定中心距、V带长度、验算包角 (8)2.3确定V带根数、计算初拉力压轴力 (8)2.4带轮结构设计 (9)第3章减速器内传动的设计计算 (10)3.1高速级齿轮传动的设计计算 (10)3.2低速级齿轮传动的设计计算 (14)3.3齿轮上作用力的计算 (18)第4章减速器装配草图的设计 (21)4.1合理布置图面 (21)4.2绘出齿轮的轮廓尺寸 (21)4.3箱体内壁 (21)第5章轴的设计计算 (22)5.1高速轴的设计与计算 (22)5.2中间轴的设计与计算 (28)5.3低速轴的设计计算 (35)第6章减速器箱体的结构尺寸 (41)第7章润滑油的选择与计算 (42)第8章装配图和零件图 (43)1.1附件设计与选择 (43)8.2绘制装配图和零件图 (43)参考文献 (44)致谢 (45)概述毕业设计目的在于培养机械设计能力。
毕业设计是完成机械制造及自动化专业全部课程学习的最后一次较为全面的、重要的、必不可少的实践性教学环节,其目的为:1. 通过毕业设计培养综合运用所学全部专业及专业基础课程的理论知识,解决工程实际问题的能力,并通过实际设计训练,使理论知识得以巩固和提高。
2. 通过毕业设计的实践,掌握一般机械设计的基本方法和程序,培养独立设计能力。
3. 进行机械设计工作基本技能的训练,包括训练、计算、绘图能力、计算机辅助设计能力,熟悉和运用设计资料(手册、图册、标准、规范等)。
设计任务书一、设计题目:带式输送机传动装置输送机连续工作,单项运转,载荷变化不大,使用期限10年,两班制工作,输送带速度允许误差为±0.5%二、原始数据:三、设计内容和要求:本毕业设计选择齿轮减速器为设计课题,设计的主要内容包括以下几方面:(1)拟定、分析传动装置的运动和动力参数;(2)选择电动机,计算传动装置的运动和动力参数;(3)进行传动件带、齿轮、轴的设计计算,校核轴、轴承、联轴器、键等;(4)绘制减速器装配图及典型零件图(有条件可用AutoCAD绘制);(5)编写设计计算说明书。
工业机器人设计(含全套CAD图纸)
工业机器人设计(含全套CAD图纸)工业机器人设计摘要在生产过程工业机械手是模拟人手动作的机械设备,它可以替代人工搬运重物或单调,在高粉尘,高温,有毒,易燃,放射性和其他相对较差的工作环境。
机器人可用于在生产过程中的自动化抓住并移动工件自动化设备,它是在生产过程的机械化和自动化,开发出一种新的类型的设备。
近年来,随着电子技术,特别是计算机的广泛使用机器人的开发和生产的高科技领域已成为迅速发展起来的一项新兴技术,它更促进机器人的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能够代替人类完成危险、减轻人类劳动强度、重复枯燥的工作,提高劳动生产力。
本设计是关于三自由度的圆柱形机械手。
利用Auto CAD软件对制件进行设计绘图。
其包括夹持器、小臂、大臂和底座。
明确合理的设计思路,确定了机械手工作原理并对然夹持器、气缸、步进电机、轴承进行了校核计算并附带了简图并对零件的质量、重心、惯性主轴和惯性力矩进行辅助设计计算,可以大大减轻在设计过程中繁琐计算及校核步骤。
关键字:机械手,气缸,校核。
IIIAbstractIndustrial manipulator is the mechanical equipment which is used in the production process and simulate to the behave of hands withelectrical integration. It can carry heavy objects and work in the harsh environment which is high temperature, poisonous ,full of dust,flammable and combustible monotonous and full of radioactive substance instead of people. Manipulator is a automatic device which is used in the automatic production process and it can carry and move things. It is a new device which is developed in the mechanization and automatic production process. In recent years , with the widely used of electronic technique especially the electronic computer. The research and production of robot has became a new technology which is developing rapidly in the high-tech industry . It promotes the development of manipulator. It makes the combination of the manipulator with mechanization and automation become easier . Manipulator can complete the dangerous and boring work instead of people. It can reduce labour intensity of people and raise the labour productivity .This design is a cylindrical manipulator which is related to delta degrees of freedom. It designs and draws the picture with Auto cad software ,it includes holder, a small arm, the big arm and the base. The clear and reasonable thinking determines the working principle of the manipulator . This also checks and calculates the holder, cylinder, stepper motor and bearing. Apart from this , it contains some pictures and design and measure the quality , barycentre principal axis ofinertia and force of parts. It can greatly reduce the complicated calculation and check in the design process.Keywords: robot, cylinder, checkingIV目录摘要 (III)ABSTRACT ............................................................... .... IV 目录 ..................................................................... ... V 1 绪论 ......................................................................1 1.1 本课题研究的内容和意义 ................................................. 1 1.2 国内外发展概况 ......................................................... 1 1.3 工业机械手设计内容 (2)1.4 机械手设计的作用 ....................................................... 2 1.5 工业机械手的分类和组成 ................................................. 2 2手部的设计 (5)2.1 机械手设计参数和运动方案 (5)2.1.1 运动方案 (5)2.1.2 驱动系统和位置检测装置的选择: ..................................... 5 2.2 手部设计的结构和计算 (6)2.2.1 机械手的基本要求 ................................................... 6 2.3 手部力的计算 .. (7)2.3.1 夹紧力的计算 (7)2.3.2 手爪驱动气缸的设计 (8)2.3.3 手部误差的分析 .................................................... 10 3 机械手臂的设计 ........................................................... 12 3.1 机械小臂设计 ..........................................................123.1.1 小臂驱动力的计算 (12)3.1.2 小臂驱动气缸的设计 (13),3.1.3 气缸筒壁厚的计算 (14)3.1.4 气缸的选用 (14)3.1.5 校核活塞的稳定性 (14)3.1.6 小臂刚度校核 (15)3.1.7 端盖的连接方式及强度计算 .......................................... 15 3.2 大臂的结构设计 (16)3.2.1 大臂的结构和要求 (16)3.2.2 驱动力的计算 (17)3.2.3 大臂驱动气缸的设计 (17)3.2.4 气缸的选择 (18)3.2.5 校核活塞的稳定性 (18)大臂刚度校核 .......................................................18 3.2.64 驱动系统设计 ............................................................. 20 4.1 轴承的设计 ............................................................204.1.1 轴承的选择 (20)轴承的计算: .......................................................20 4.1.24.1.3 轴承的寿命校核: (21)电机的基本情况和选择 .................................................. 22 4.24.2.1 电机的选则与计算 (22)4.2.2 注意事项 (23)4.2.3 工作原理 (23)4.2.4 步进电机的特点 ..................................................... 24 4.3 谐波减速器 (24)4.3.1 谐波减速器的简介 (24)4.3.2 谐波减速器的设计 ................................................... 25 4.4 腰座的结构 ............................................................ 26 5 总结 (27)致谢 ....................................................................28 参考文献 ...................................................................29 附录 .....................................................................30VI工业机器人设计1 绪论1.1 本课题研究的内容和意义机械工业是国民的基本部分。
机械设计课程设计减速器CAD装配图

2、不合理结构:放油孔位置偏高,箱内的 油放不干净
3、不合理结构:轴承盖螺钉设计在剖分面上。
4、不合理结构:各轴承座孔外端面不平齐,不 利于加工。
5、不合理结构:定位销孔位置不当。
装配草图设计——草图设计第二阶段
2.轴承组合设计: ①轴系轴向固定与调整方法; ②轴系结构与画法; ③轴系润滑与密封; ④轴系盖结构; ⑤轴结构细化 ┏圆角、倒角: ┃退刀槽: ┗砂轮越程槽等:
装配草图设计——草图设计第三阶段
五、装配草图第三阶段: 任务:完成装配草图 内容:1、设计减速器机体和附件
C1
B1
Δ4由主视图 上箱体结构的 投影确定
C2
B2
A1
A2
af
a
s
A
3
B3
C
3
A1
B1
C1
af
A2
a
s
B2
C2
A
3
B3
C
3
装配工作图设计
装配图的检查
1、装配图是否与传动方案一致; 2、传动件、轴、轴承及轴上零件结构是否合理; 定位、固定是否可靠;加工、装拆是否方便; 润滑、密封如何考虑的; 3、箱体的结构与工艺性是否合理; 加工面与非加工面; 附件的布置是否恰当、结构是否正确; 4、设计计算的尺寸与实际尺寸是否一致;
三、精算: 轴的安全系数校核,弯扭组合强度计算 (★ ★ ★ 轴承寿命(★ ★ ★ 键 (★ ★ ★ 任务:轴系结构设计 内容:设计传动零件、轴上其它零件及与轴承 支点结构有关零件的具体结构。 1.传动件结构设计:见前 四、草图第二阶段: 高速轴) 高速轴轴承) 高速轴上键)
装配草图设计——草图设计第二阶段
3
p n
两级展开式圆柱齿轮减速器(含全套CAD图纸)

目 录一 课程设计书 2二 设计要求 2三 设计步骤 21. 传动装置总体设计方案 32. 电动机的选择 43. 确定传动装置的总传动比和分配传动比 54. 计算传动装置的运动和动力参数 55. 设计V带和带轮 66. 齿轮的设计 87. 滚动轴承和传动轴的设计 198. 键联接设计 269. 箱体结构的设计 2710.润滑密封设计 3011.联轴器设计 30四 设计小结31五 参考资料32一. 课程设计书设计课题:设计一用于带式运输机上的两级展开式圆柱齿轮减速器.运输机连续单向运 转,载荷变化不大,空载起动,卷筒效率为 0.96(包括其支承轴承效率的损失),减速 器小批量生产,使用期限8年(300天/年),两班制工作,运输容许速度误差为5%,车 间有三相交流,电压380/220V表一:题号1 2 3 4 5参数运输带工作拉力2.5 2.3 2.1 1.9 1.8(kN)运输带工作速度1.0 1.1 1.2 1.3 1.4(m/s)卷筒直径(mm) 250 250 250 300 300二. 设计要求1.减速器装配图一张(A1)。
2.CAD绘制轴、齿轮零件图各一张(A3)。
3.设计说明书一份。
三. 设计步骤1. 传动装置总体设计方案2. 电动机的选择3. 确定传动装置的总传动比和分配传动比4. 计算传动装置的运动和动力参数5. 设计V带和带轮6. 齿轮的设计7. 滚动轴承和传动轴的设计8. 键联接设计9. 箱体结构设计10. 润滑密封设计11. 联轴器设计1.传动装置总体设计方案:1. 组成:传动装置由电机、减速器、工作机组成。
2. 特点:齿轮相对于轴承不对称分布,故沿轴向载荷分布不均匀, 要求轴有较大的刚度。
3. 确定传动方案:考虑到电机转速高,传动功率大,将V 带设置在高速级。
其传动方案如下:η2 η3η5η4η1I IIIIIIVPdPw图一:(传动装置总体设计图)初步确定传动系统总体方案如:传动装置总体设计图所示。
减速器装配图、大齿轮零件图和输出轴零件图
第1章初始参数及其设计要求保证机构件强度前提下,注意外形美观,各部分比例协调。
初始参数:功率P=2.8kW,总传动比i=5第2章 电动机2.1 电动机的选择根据粉碎机的工作条件及生产要求,在电动机能够满足使用要求的前提下,尽可能选用价格较低的电动机,以降低制造成本。
由于额定功率相同的电动机,如果转速越低,则尺寸越大,价格越贵。
粉碎机所需要的功率为kw P 8.2=,故选用Y 系列(Y100L2-4)型三相笼型异步电动机。
Y 系列三相笼型异步电动机是按照国际电工委员会(IEO )标准设计的,具有国际互换性的特点。
其中Y 系列(Y100L2-4)电动机为全封闭的自扇冷式笼型三相异步电动机,具有防灰尘、铁屑或其它杂务物侵入电动机内部之特点,B 级绝缘,工作环境不超过+40℃,相对温度不超过95%,海拔高度不超过1000m ,额定电压为380V ,频率50HZ ,适用于无特殊要求的机械上,如农业机械。
Y 系列三相笼型异步电动具有效率高、启动转矩大、且提高了防护等级为IP54、提高了绝缘等级、噪音低、结构合理产品先进、应用很广泛。
其主要技术参数如下:型号:42100-L Y 同步转速:min /1500r 额定功率:kw P 3= 满载转速:min /1420r堵转转矩/额定转矩:)/(2.2m N T n ⋅ 最大转矩/额定转矩:)/(2.2m N T n ⋅ 质量:kg 3.4 极数:4极机座中心高:mm 100该电动机采用立式安装,机座不带底脚,端盖与凸缘,轴伸向下。
2.2电机机座的选择第3章 传动比及其相关参数计算3.1 传动比及其相关参数的分配根据设计要求,电动机型号为Y100L2-4,功率P=3kw ,转速n=1420r/min 。
输出端转速为n=300r/min 。
总传动比: 73.430014401===n n i ; (3-1)分配传动比:取3=D i ; 齿轮减速器:58.1373.4===D L i i i ; (3-2) 高速传动比:5.158.14.14.112=⨯==L i i ; (3-3)低速传动比:05.15.158.11223===i i i L 。
减速器毕业设计(内附有图纸)
摘要齿轮传动是现代机械中应用最广的一种传动形式。
它的主要优点是:①瞬时传动比恒定、工作平稳、传动准确可靠,可传递空间任意两轴之间的运动和动力;②适用的功率和速度范围广;③传动效率高,η=0.92-0.98;④工作可靠、使用寿命长;⑤外轮廓尺寸小、结构紧凑。
由齿轮、轴、轴承及箱体组成的齿轮减速器,用于原动机和工作机或执行机构之间,起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。
国内的减速器多以齿轮传动、蜗杆传动为主,但普遍存在着功率与重量比小,或者传动比大而机械效率过低的问题。
另外,材料品质和工艺水平上还有许多弱点,特别是大型的减速器问题更突出,使用寿命不长。
国外的减速器,以德国、丹麦和日本处于领先地位,特别在材料和制造工艺方面占据优势,减速器工作可靠性好,使用寿命长。
但其传动形式仍以定轴齿轮传动为主,体积和重量问题,也未解决好。
当今的减速器是向着大功率、大传动比、小体积、高机械效率以及使用寿命长的方向发展。
减速器与电动机的连体结构,也是大力开拓的形式,并已生产多种结构形式和多种功率型号的产品。
近十几年来,由于近代计算机技术与数控技术的发展,使得机械加工精度,加工效率大大提高,从而推动了机械传动产品的多样化,整机配套的模块化,标准化,以及造型设计艺术化,使产品更加精致,美观化。
在21世纪成套机械装备中,齿轮仍然是机械传动的基本部件。
CNC机床和工艺技术的发展,推动了机械传动结构的飞速发展。
在传动系统设计中的电子控制、液压传动、齿轮、带链的混合传动,将成为变速箱设计中优化传动组合的方向。
在传动设计中的学科交叉,将成为新型传动产品发展的重要趋势。
关键字:减速器;轴承;齿轮;机械传动。
目录摘要 (I)目录................................................. I II 第1章减速箱传动方案的拟定及说明 . (1)1.1、工作机器特征的分析 (1)1.2、传动方案的拟定及说明 (1)第2章运动参数计算 (3)2.1电机的选择 (3)2.2传动比的分配 (5)2.3 运动参数的计算 (7)第3章各传动零件的设计计算 (9)3.1皮带轮的设计计算. (9)3.2皮带轮结构设计 (15)3.3齿轮的设计 (18)3.4各轴的设计 (34)3.5 轴承的选择及校核 (62)3.6 键的选择与校核 (71)第4章减速器的箱体(箱盖)设计 (77)4.1 箱体(箱盖)的分析 (77)4.2 箱体(盖)的材料 (77)4.3 箱体的设计计算(参照【4】*P15) (77)第5章减速器的润滑 (81)5.1 润滑方式的确定 (81)5.2 油池中油量的确定 (81)5.3 轴承润滑 (81)5.4 润滑剂的选择 (82)5.5 油的密封及防止脂的稀释 (82)参考文献 (84)第1章减速箱传动方案的拟定及说明1.1、工作机器特征的分析由设计任务书可知:该减速箱用于螺旋运输机,工作速度不高(V=0.8m/s),圆周力不大(P=4000N),因而传递的功率也不会太大.由于工作运输机工作平稳,转向不变,使用寿命不长(5年),故减速箱应尽量设计成闭式,箱体内用油液润滑,轴承用脂润滑.要尽可能使减速箱外形及体内零部件尺寸小,结构简单紧凑,造价低廉,生产周期短,效率高。
一级(单级)蜗轮蜗杆减速器设计(含全套CAD图纸)

a
ö1.75 ÷
=
0.33çæ
232
ö1.75 ÷
= 1.439m2
è 100 ø
è 100 ø
②验算油的工作温度 ti
室温 t0 :通常取 20° 。
散热系数 ks :Ks=17.5 W/(㎡·℃)。
ti
=
1000(1 -h)P1
ks A
+ t0
=
çæ1000 ´ (1- 0.87)´ 410.33
3 减速器的总体设计
3.1 传动装置的总体设计
3.1.1 拟订传动方案
1
本传动装置用于带式运输机,工作参数:运输带工作拉力 F=5KN,工作速度=1.6m/s, 滚筒直径 D=500mm,传动效率η=0.96,(包括滚筒与轴承的效率损失)两班制,连续单向 运转,载荷较平稳;使用寿命 8 年。环境最高温度 80℃。本设计拟采用蜗轮蜗杆减速器, 传动简图如下图所示。
3.1.3 确定传动装置的传动比及其分配
减速器总传动比及其分配: 减速器总传动比 i=nm/nw=1460/61.2=23.9 本课题是一级蜗轮蜗杆减速器,它的传动比 i=10-40 之间,选 i=24 传动比查《机械工程及自动化简明设计手册》上册(表 25)
3
式中 i—传动装置总传动比 nw—工作机的转速,单位 r/min nm—电动机的满载转速,单位 r/min
P d =10.12/0.96=10.54 kW
查表,选取电动机的额定功率 P cd =11kw。 (3)选择电动机的转速 传动滚筒转速 nw= 60 ´ 1000v =61.2 r/min 由表推荐的传动比的合理范围,取蜗轮蜗杆
pD 减速器的传动比 i' =10~40,故电动机转速的可选范围为:
工业机器人设计(含全套CAD图纸)
工业机器人设计(含全套CAD图纸)工业机器人设计摘要在生产过程工业机械手是模拟人手动作的机械设备,它可以替代人工搬运重物或单调,在高粉尘,高温,有毒,易燃,放射性和其他相对较差的工作环境。
机器人可用于在生产过程中的自动化抓住并移动工件自动化设备,它是在生产过程的机械化和自动化,开发出一种新的类型的设备。
近年来,随着电子技术,特别是计算机的广泛使用机器人的开发和生产的高科技领域已成为迅速发展起来的一项新兴技术,它更促进机器人的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能够代替人类完成危险、减轻人类劳动强度、重复枯燥的工作,提高劳动生产力。
本设计是关于三自由度的圆柱形机械手。
利用Auto CAD软件对制件进行设计绘图。
其包括夹持器、小臂、大臂和底座。
明确合理的设计思路,确定了机械手工作原理并对然夹持器、气缸、步进电机、轴承进行了校核计算并附带了简图并对零件的质量、重心、惯性主轴和惯性力矩进行辅助设计计算,可以大大减轻在设计过程中繁琐计算及校核步骤。
关键字:机械手,气缸,校核。
IIIAbstractIndustrial manipulator is the mechanical equipment which is used in the production process and simulate to the behave of hands withelectrical integration. It can carry heavy objects and work in the harsh environment which is high temperature, poisonous ,full of dust,flammable and combustible monotonous and full of radioactive substance instead of people. Manipulator is a automatic device which is used in the automatic production process and it can carry and move things. It is a new device which is developed in the mechanization and automatic production process. In recent years , with the widely used of electronic technique especially the electronic computer. The research and production of robot has became a new technology which is developing rapidly in the high-tech industry . It promotes the development of manipulator. It makes the combination of the manipulator with mechanization and automation become easier . Manipulator can complete the dangerous and boring work instead of people. It can reduce labour intensity of people and raise the labour productivity .This design is a cylindrical manipulator which is related to delta degrees of freedom. It designs and draws the picture with Auto cad software ,it includes holder, a small arm, the big arm and the base. The clear and reasonable thinking determines the working principle of the manipulator . This also checks and calculates the holder, cylinder, stepper motor and bearing. Apart from this , it contains some pictures and design and measure the quality , barycentre principal axis ofinertia and force of parts. It can greatly reduce the complicated calculation and check in the design process.Keywords: robot, cylinder, checkingIV目录摘要 (III)ABSTRACT ............................................................... .... IV 目录 ..................................................................... ... V 1 绪论 ......................................................................1 1.1 本课题研究的内容和意义 ................................................. 1 1.2 国内外发展概况 ......................................................... 1 1.3 工业机械手设计内容 (2)1.4 机械手设计的作用 ....................................................... 2 1.5 工业机械手的分类和组成 ................................................. 2 2手部的设计 (5)2.1 机械手设计参数和运动方案 (5)2.1.1 运动方案 (5)2.1.2 驱动系统和位置检测装置的选择: ..................................... 5 2.2 手部设计的结构和计算 (6)2.2.1 机械手的基本要求 ................................................... 6 2.3 手部力的计算 .. (7)2.3.1 夹紧力的计算 (7)2.3.2 手爪驱动气缸的设计 (8)2.3.3 手部误差的分析 .................................................... 10 3 机械手臂的设计 ........................................................... 12 3.1 机械小臂设计 ..........................................................123.1.1 小臂驱动力的计算 (12)3.1.2 小臂驱动气缸的设计 (13),3.1.3 气缸筒壁厚的计算 (14)3.1.4 气缸的选用 (14)3.1.5 校核活塞的稳定性 (14)3.1.6 小臂刚度校核 (15)3.1.7 端盖的连接方式及强度计算 .......................................... 15 3.2 大臂的结构设计 (16)3.2.1 大臂的结构和要求 (16)3.2.2 驱动力的计算 (17)3.2.3 大臂驱动气缸的设计 (17)3.2.4 气缸的选择 (18)3.2.5 校核活塞的稳定性 (18)大臂刚度校核 .......................................................18 3.2.64 驱动系统设计 ............................................................. 20 4.1 轴承的设计 ............................................................204.1.1 轴承的选择 (20)轴承的计算: .......................................................20 4.1.24.1.3 轴承的寿命校核: (21)电机的基本情况和选择 .................................................. 22 4.24.2.1 电机的选则与计算 (22)4.2.2 注意事项 (23)4.2.3 工作原理 (23)4.2.4 步进电机的特点 ..................................................... 24 4.3 谐波减速器 (24)4.3.1 谐波减速器的简介 (24)4.3.2 谐波减速器的设计 ................................................... 25 4.4 腰座的结构 ............................................................ 26 5 总结 (27)致谢 ....................................................................28 参考文献 ...................................................................29 附录 .....................................................................30VI工业机器人设计1 绪论1.1 本课题研究的内容和意义机械工业是国民的基本部分。