均值漂移去噪算法的研究
一类未知噪声模型的图像去噪方法
一类未知噪声模型的图像去噪方法彭宏;赵海英;黄甜甜【摘要】图像中包含噪声不仅会降低图像质量,而且严重影响后续相关算法的有效性.高效稳健的去噪方法对于各类信号处理非常重要.为了改善实际夜间远程拍摄图像的质量,引入五种图像降噪方法.首先在合理推导噪声模型的基础上,引入Kalman 滤波器去除夜空图像背景噪声;然后分别进行中值滤波、均值滤波、维纳滤波和无参估计的均值漂移算法去除实际夜空图像噪声;最后分析比较五种去噪方法,并给出不同算法的信噪比与峰值信噪比.实验结果:五种降噪方法虽不同程度地降低了夜空图像噪声影响,但均值漂移算法较好地保持了图像有用信息和边缘特征,而且算法不需考虑噪声模型.结论:均值漂移算法展示出在这一类未知噪声模型的夜空背景降噪中的优势.%Noise of image does not only reduce the quality of image but also interferes with the validity of correlative processing arithmetic seriously. Therefore, effective and robust methods of removing noise are very important for various signal processing. To improve quality of the actual distance remote control image in the paper, MeanShift algorithm of no parameter estimation is introduced and five methods of removing image noise are compared. Firstly, based on the reasonable assume to be noise model to remove image noise. Kalman filtering is used to remove noise. Then median filtering, mean filtering and Wiener filtering are performed separately. Finally, MeanShift algorithm is applied to remove noise. Experimental results show the five methods which are used in this paper reduce the noise in the night sky image to varying degrees. Moreover MeanShift algorithm in image denoising keeps the detailinformation and edge character of the image better. Compared with the five traditional filtering methods, MeanShift algorithm shows the advantage in image denoising of the actual night sky image background noise.【期刊名称】《计算机系统应用》【年(卷),期】2011(020)012【总页数】6页(P205-210)【关键词】未知噪声模型;均值漂移;噪声均方估计;Kalman滤波【作者】彭宏;赵海英;黄甜甜【作者单位】新疆师范大学网络教育学院,乌鲁木齐830054;新疆师范大学计算机科学技术学院,乌鲁木齐830054;北京科技大学信息工程学院,北京100083;北京科技大学信息工程学院,北京100083【正文语种】中文1 引言图像去噪的目的在于消除混杂在图像中的噪声干扰,达到改善图像质量、强化图像的特征信息的目的。
MATLAB中多种图像去噪算法的比较分析

MATLAB中多种图像去噪算法的比较分析在MATLAB中,有多种图像去噪算法可供选择。
这些算法各有优势和劣势,适用于不同的噪声类型和图像特征。
本文将对几种常见的图像去噪算法进行比较分析,包括均值滤波、中值滤波、高斯滤波和小波去噪。
1. 均值滤波均值滤波是最简单的图像去噪算法之一。
它通过计算像素周围邻域的平均值来减少图像中的噪声。
然而,均值滤波在去除噪声的同时也会模糊图像的细节,特别是对于边缘部分的处理效果不佳。
2. 中值滤波中值滤波是一种非线性滤波算法,它通过将像素点邻域内的像素值排序并选择其中的中值来进行去噪。
相比于均值滤波,中值滤波能够更好地保留图像的细节,并且对于椒盐噪声等脉冲噪声具有较好的去除效果。
然而,中值滤波对于高斯噪声等噪声类型的去除效果较差。
3. 高斯滤波高斯滤波是一种基于高斯函数的平滑滤波算法。
它通过将像素点邻域内的像素值与对应的高斯权重进行加权平均来进行去噪。
高斯滤波能够较好地去除高斯噪声,并且保持图像的细节信息。
然而,对于椒盐噪声等脉冲噪声,高斯滤波的效果较差。
4. 小波去噪小波去噪是一种基于小波变换的图像去噪算法。
它通过将图像进行小波分解,对低频分量和高频分量进行独立的去噪处理,然后再进行小波重构。
小波去噪能够同时去除图像中的噪声和保持图像细节,对于各种噪声类型都有较好的去除效果。
然而,小波去噪算法的计算复杂度较高,运行时间较长。
综合比较以上四种图像去噪算法,我们可以根据噪声类型和图像特征选择合适的算法。
如果图像中存在高斯噪声,可以使用高斯滤波进行去噪;如果图像中存在椒盐噪声,可以使用中值滤波进行去噪;如果需要同时去除多种噪声类型并保持图像细节,可以考虑使用小波去噪算法。
此外,在实际应用中,我们还可以通过调整算法参数来进一步优化去噪效果。
例如,对于滤波算法,可以调整滤波器的大小来控制去噪力度;对于小波去噪算法,可以选择不同的小波基函数以适应不同图像特征。
总之,MATLAB中提供了多种图像去噪算法,每种算法都有其适用的场景和优势。
图像处理中的去噪算法与优化研究

图像处理中的去噪算法与优化研究概述:图像去噪是图像处理中的一个重要任务,旨在从被噪声污染的图像中恢复出原始图像。
因为噪声会对图像的细节和质量造成影响,导致图片信息的丢失或失真。
因此,去噪算法的研究对于保护图像的质量和提升图像处理的结果至关重要。
本文将介绍图像处理中常用的去噪算法,并对其进行优化研究。
一、经典去噪算法1. 均值滤波器:均值滤波器是一种简单但常用的去噪算法。
其原理是用目标像素周围邻域像素的均值来代替该像素的值。
均值滤波器的优点在于简单易实现,但它的去噪效果相对较差,尤其是在像素存在边缘或细节部分时容易产生模糊效果。
2. 中值滤波器:中值滤波器是一种非线性滤波算法,通过选取窗口中邻域像素的中值来替代当前像素的值。
相较于均值滤波器,中值滤波器能更好地保护边缘和细节信息,能够有效去除椒盐噪声等大强度噪声。
然而,中值滤波器对于高斯噪声等低强度噪声去除效果较差。
3. 小波去噪:小波去噪是一种基于小波变换的去噪算法,其原理是利用小波变换将信号在时域和频域进行分解,并利用小波系数的特性进行噪声去除。
小波去噪算法可以根据噪声的特点,选择不同类型的小波进行分析和去噪。
相较于线性滤波器,小波去噪算法能更好地保护图像的边缘和细节,去噪效果较好。
但小波去噪算法的计算复杂度较高,且需要选择合适的小波基函数参数。
二、去噪算法优化研究1. 参数调优:对于经典的去噪算法,调整算法中的参数可以影响去噪效果。
例如,在中值滤波算法中,选择合适的窗口大小可以提高去噪效果,但过大的窗口可能导致细节信息的损失。
因此,通过实验和比较,选择合适的参数对于优化去噪算法是非常重要的。
2. 多尺度方法:多尺度方法是一种提高去噪效果的方式。
该方法通过在不同尺度下处理图像,结合各尺度的结果来获得最终的去噪结果。
多尺度方法可以更好地保护图像的细节信息,并能有效地去除不同尺度的噪声。
其中,小波变换是多尺度方法中常用的处理方法。
3. 深度学习:近年来,深度学习技术在图像处理领域取得了巨大成功。
均值漂移算法及其拓展

均值漂移算法及其拓展1.引言1.1 概述均值漂移算法是一种基于密度估计的非参数聚类算法,它能够自动发现数据中的聚类结构并生成聚类中心。
该算法在计算机视觉、图像处理、模式识别等领域得到广泛应用。
均值漂移算法通过不断迭代样本点的平移来寻找局部最大密度区域,从而实现聚类。
本文将对均值漂移算法进行详细介绍,并探讨其拓展方法。
首先,我们将介绍均值漂移算法的基本原理和步骤,展示其在聚类分析中的应用。
然后,我们将讨论基于核函数的均值漂移算法,该方法利用核函数将数据映射到高维空间,从而对非线性数据进行聚类分析。
另外,我们还将介绍增量式均值漂移算法,该算法可以在动态数据流的环境下实时地进行聚类。
通过本文的阅读,读者将了解均值漂移算法的基本原理和步骤,以及其在聚类分析中的应用。
此外,我们还展示了基于核函数和增量式的均值漂移算法,在处理非线性数据和动态数据流方面具有较好的性能。
最后,我们将对均值漂移算法和其拓展方法进行总结并对未来发展进行展望。
1.2 文章结构文章结构部分的内容可以包括文章的框架和组成部分的简要说明。
具体可以如下编写:文章结构:本文主要围绕均值漂移算法及其拓展展开,分为引言、正文和结论三个部分。
引言:引言部分首先对本文的主题进行概述,即均值漂移算法及其拓展。
其次,介绍文章的结构安排,包括各个章节的内容和组成部分。
最后,明确本文的目的,即探讨均值漂移算法在数据处理和模式识别中的应用,以及介绍相关拓展方法。
引言部分的目的是引起读者的兴趣,并为接下来的正文部分做好铺垫。
正文:正文部分分为两个主要部分:均值漂移算法和拓展方法。
2.1 均值漂移算法:本部分主要介绍均值漂移算法的原理和步骤。
首先,详细解释均值漂移算法的基本原理,包括如何通过密度估计实现数据聚类。
然后,详细介绍均值漂移算法的步骤,包括选择核函数和带宽参数等关键步骤。
2.2 拓展方法:本部分主要讨论基于核函数的均值漂移算法和增量式均值漂移算法。
首先介绍基于核函数的均值漂移算法,包括核函数的选择和使用方法。
改进的邻域均值滤波去噪算法研究
改进的邻域均值滤波去噪算法研究牛秀琴【摘要】邻域均值滤波算法作为图像去噪算法的经典方法,不仅可以有效地消除噪声对图像的干扰程度,并且能够快速平滑图像,但它的缺点是会使图像边缘模糊,窗口越大,模糊程度越明显。
本文针对椒盐噪声,分析原邻域均值滤波算法,通过与能量最小化原理相结合,提出新的改进的邻域均值滤波算法,这个算法构造了两个不同能量最小化函数模型,即E1模型和E2模型。
两个模型均从图像像素点局部邻域出发,通过求解局部邻域能量最小判断是否利用邻域均值替换原像素灰度值。
这个新的去噪算法不仅改变了原邻域均值滤波算法单一的替换灰度值的做法,降低了将非噪声点误判为噪声点的可能性,并且可以根据图像的大小自适应调节阈值,最后达到去除噪声的效果。
通过与邻域均值滤波算法进行实验对比,取得较好的去除噪声效果。
%Neighborhood mean denoising algorithm as one method of image denoising algorithm,can not only effectively remove image noise,but also can be quickly smooth image.Meanwhile,it can make the image edge blur.First,this paper proposes new energy models based on Energy Minimization principle and Neighborhood mean filter,which is named Energy model,such as model E1 and model E2,and then,proposes a new Neighborhood Mean Denoising Filter.According to solve the local neighborhood energy minimum,two models judge whether pixel grayscale value is substituted.The new Neighborhood Mean Denoising algorithm not only change the single way of original neighborhood mean filter algorithm,but also reduce the possibility of the good pixels be mistakenfor the noise pixels.Meanwhile,it can change the threshold free.This filter is particularly effective in suppressing Salt pepper noise.【期刊名称】《长治学院学报》【年(卷),期】2012(029)002【总页数】5页(P4-8)【关键词】图像去噪;邻域均值滤波算法;能量最小化【作者】牛秀琴【作者单位】四川师范大学数学与软件科学学院,四川成都610066【正文语种】中文【中图分类】TP391图像去噪作为图像处理的一个重要环节,不仅可以帮助人们更加准确的运用图像,并能应用到其他众多领域,例如医学、物理、航天等。
均值漂移算法的研究与应用

其中常数 a 保 证 了 核 函 数 的 归 一 化 条 件 . 此 时 ,
1 引 言
均值漂移 ( MS) 算法是一种有效的统计迭代算 法 [ 1 ] ,是由 Fukunaga 在 1975 年首先提出的 . 直到
1995 年 ,Cheng[ 2 ] 改进了 MS 算法中的核函数和权
均值漂移算法的基本思想是 , 通过反复迭代搜 索特征空间中样本点最密集的区域 ,如图 1 所示 ,搜 索点沿着样本点密度增加的方向 “漂移” 到局部密度 极大点 . 均值漂移算法原理简单 、 迭代效率高 , 但迭 代过程中搜索区域大小对算法的准确性和效率有很 大的影响 . 为了提高搜索算法的准确度 , 文献 [ 6 ] 提 出根据采样点的局部密度自适应地计算搜索区域的 大小 ; 文献 [ 8 ] 则采用多尺度的分析方法选择搜索区 域 . 然而这些方法增加了迭代算法的计算量 ,降低了 算法的效率 . 文献 [ 12 ] 改进了传统的 KD2 Tree 数据 结构 ,采用局部敏感的哈希表来提高算法的计算效 率 . 当采样点是多维变量 , 且混合了多种密度分布 时 ,MS 算法仍很难高效 、 准确地搜索到各密度极大 值点 . 本文首先根据密度函数的非参数估计方法推导 出均值漂移公式的一般形式 , 并说明了均值漂移迭
基金项目 : 国家自然科学基金项目 (69975003) .
) ,女 ,湖南株洲人 ,博士生 ,从事虚拟现实技术 、 ) , 作者简介 : 周芳芳 ( 1980 — 科学计算可视化等研究 ; 樊晓平 ( 1961 —
男 ,浙江绍兴人 ,教授 ,博士生导师 ,从事智能控制 、 智能机器人等研究 .
n
1 - 2 1 - 2
均值漂移算法原理_概述及解释说明

均值漂移算法原理概述及解释说明1. 引言1.1 概述均值漂移算法是一种无监督学习算法,用于聚类和密度估计。
该算法通过对数据点进行迭代处理,使得每个数据点都朝着数据分布的高密度区域漂移。
它逐步调整估计的概率密度函数,并通过对核密度估计相对局部极值点的寻找,实现优化聚类结果。
1.2 文章结构本文将首先介绍均值漂移算法的基本原理及其在实际应用中的步骤。
然后,我们将详细解释算法中涉及到的核密度估计技术、全局和局部极值点寻找方法以及对象迁移过程分析。
接下来,我们将说明如何准备数据集并进行实验,并对参数调节实验与结果进行分析。
最后,文章将讨论均值漂移算法与其他相关算法的比较,并总结主要发现和贡献。
在文章的最后一部分,我们还会展望均值漂移算法的发展方向和应用前景。
1.3 目的本文旨在深入探讨均值漂移算法原理及其应用领域,并通过详细说明核密度估计技术、全局和局部极值点寻找方法以及对象迁移过程分析,使读者对该算法有一个清晰的理解。
此外,我们还将通过实验结果与比较讨论,评估均值漂移算法的性能,并提出未来算法发展的建议。
希望本文能够为研究者和从业者提供有价值的参考和启发,推动均值漂移算法在各个领域的应用与发展。
2. 均值漂移算法原理2.1 漂移概念解释均值漂移算法是一种非参数的密度估计方法,其主要思想是通过对数据点的密度进行评估和更新来找到数据分布中的聚类中心。
漂移概念指的是在迭代过程中,数据点从初始位置向高密度区域“漂移”的现象。
2.2 算法步骤介绍均值漂移算法的主要步骤包括:首先,选择一个核函数和带宽参数来计算每个数据点的权重,并初始化聚类中心。
然后,根据每个数据点与聚类中心之间的距离和权重,计算新的聚类中心位置。
接下来,迭代地更新每个数据点的权重,并重新计算新的聚类中心直至收敛。
最后,将收敛后得到的聚类中心作为样本数据集的最终划分结果。
2.3 应用领域示例均值漂移算法在各个领域都有广泛应用。
在图像处理领域,均值漂移可以用于图像分割、目标跟踪等任务;在模式识别领域,均值漂移可以应用于人脸识别、手写数字识别等任务;在无线传感器网络中,均值漂移可以应用于数据聚类和异常检测等任务。
一种基于优化预处理的均值漂移算法
一种基于优化预处理的均值漂移算法
史以桢;黎宁
【期刊名称】《信息通信》
【年(卷),期】2009(000)003
【摘要】对传统的Mean Shift算法进行了改进.加入了前期预处理.包括特征选择与分类.提高了复杂场景中目标的鲁棒性.传统的Mean Shift算法固定的使用一个或两个特征(比如颜色)对目标进行跟踪.当跟踪场景发生变化.容易跟踪失败.我们通过选择目标与背景区别度最大的特征同时定义显著特征与非显着特征,实现了对复杂变化场景中目标更为鲁棒的跟踪.通过对多组数据进行实验.证实了该算法的可靠性.
【总页数】5页(P40-43,59)
【作者】史以桢;黎宁
【作者单位】南京航空航天大学,信息科学与技术学院,江苏,南京·210016;南京航空航天大学,信息科学与技术学院,江苏,南京·210016
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.优化算法中初始点选取的一种预处理方法 [J], 雍龙泉;邓方安
2.一种联合优化的球形解码预处理方法 [J], 程波;杨宗凯;刘威
3.一种具有跟踪外观变化目标能力的均值漂移算法 [J], 左军毅;赵春晖;梁彦;潘泉;
张洪才
4.一种预处理的优化及计算机软件电镜分析 [J], 田娟;于兴艳
5.一种含甲醇废水预处理及现有废水处理站改造优化工艺 [J], 李一岑
因版权原因,仅展示原文概要,查看原文内容请购买。
基于均值漂移聚类的运动目标检测
yj +1 =
Σ x g ( ‖ x-x h
i i=1 n
n
i
‖) , j =1,2, … (8)
2
2 g ( ‖ yi -xi ‖ ) Σ h i=1
(3) 迭 代 步 骤 ( 1 ) 和 步 骤 ( 2 ) , 直 到 收 敛 为 止 , 即 荦 f ( xi ) =0 。
D ( x , y , △t )=| f ( x , y , t )- f ( x , y , t -1)|· | f ( x , y , t )- f ( x , y , t +1)|
n
荦
(6)
(3) 对 步 骤 ( 2 ) 得 到 的 图 像 进 行 三 帧 差 分 , 最 终 得 到
运动目标。
3.2 MS 聚 类
参 考 文 献 [5] 中 对 MS 算 法 进 行 了 详 细 的 介 绍 , 而 参 考 文 献 [6 , 8] 分 别 对 算 法 进 行 了 改 进 , 优 化 了 算 法 的 性 能 。 本 文 使 用 MS 算 法 先 将 图 像 像 素 转 换 成 特 征 空 间 的 采 样 点 , 然 后 对 采 样 点 采 用 参 考 文 献 [8] 中 的 思 想 对 图 像 进行均值漂移聚类。 对一幅彩色图像,统一考虑图像的空间信息和色彩 信息,特征空间可由二维的位置空间和三维的色度空间 组成, 图像像素转换成特征空间中的一个 5 维采样点
信号处理中的降噪算法效果评估研究
信号处理中的降噪算法效果评估研究导语:信号处理中的降噪算法在众多领域中起着重要的作用。
从音频处理到图像处理,降噪算法能够有效地去除噪声,提高信号的质量和可靠性。
本文将探讨降噪算法效果的评估研究,分析不同算法的优势和适用性。
一、引言信号处理中降噪算法的目标是去除信号中的噪声成分,以提高信号的质量和可靠性。
降噪算法的效果评估是确定算法实际应用性能和适用性的关键步骤。
二、降噪算法分类1. 统计学基础算法:均值滤波、中值滤波和高斯滤波等是常见的统计学基础算法,适用于一些简单的降噪场景。
这些算法可以通过滑动窗口处理数据,在领域上求取平均值或中值来去除噪声。
2. 自适应滤波算法:自适应滤波算法(例如LMS算法和RLS算法)能够根据接收到的信号的统计特性自学习和调整滤波参数。
这些算法能够更好地适应不同噪声环境和信号特征,提供较好的降噪效果。
3. 基于小波变换的算法:小波变换是一种多分辨率分析方法,能够将信号分解成低频和高频分量。
小波变换的低频分量通常包含信号的主要信息,而高频分量则包含噪声信息。
因此,通过对高频分量进行滤波,可以实现较好的降噪效果。
4. 基于深度学习的算法:近年来,深度学习在信号处理领域取得了显著的突破。
使用卷积神经网络(CNN)等深度学习算法可以对信号进行端到端的降噪处理。
深度学习算法能够从大量数据中学习信号的特征,以实现更高质量的降噪效果。
三、降噪算法效果评估指标降噪算法效果评估需要基于一些指标来进行对比分析。
以下是常用的评估指标:1. 均方误差(MSE):均方误差是衡量降噪算法去噪效果的重要指标。
MSE代表了算法输出和原始信号之间的平均误差。
MSE 越小,降噪效果越好。
2. 峰值信噪比(PSNR):PSNR是根据峰值信号功率和均方误差之间的比值计算得出的,通常用于评估图像降噪算法的效果。
PSNR值越大,降噪效果越好。
3. 语音质量评估:对于降噪算法在语音信号降噪中的应用,除了MSE和PSNR之外,还可以使用语音质量评估指标,如有母舌性(NBS)、有效性(EB)、语音质量(VQ)、主观感知的语音质量评分等。
均值漂移跟踪算法解读
在无人驾驶车辆测试平台上利用均值漂移跟踪算法实现移动图像的实时跟踪Benjamin Gorry, Zezhi Chen, Kevin Hammond, Andy Wallace, and Greg Michaelson摘要:本文描述了一种用来跟踪移动目标的新型计算机视觉算法,该算法是作为无人驾驶车辆长期研究的一部分而被发展的。
我们将介绍在视频序列中利用变量核进行跟踪的研究结果。
其中,均值漂移目标跟踪算法是我们工作的基础;对于一个移动目标,该算法通常用来在初始帧中确定一个矩形目标窗口,然后利用均值漂移分离算法处理该窗口中的数据,将跟踪目标从背景环境中分离出来。
我们并没有使用标准的Epanechnikov内核,而是利用一个倒角距离变换加权内核来提升目标表示和定位的精度,利用Bhattacharyya系数使RGB色彩空间中两个分布之间的距离最小化。
实验结果表明,相对于标准算法,本算法在跟踪能力和通用性上有一定的提升。
这些算法已经运用在机器人试验平台的组成部分中,并证明了这些算法的有效性。
关键词:Hume,函数程序设计,无人驾驶车辆,先驱者机器人,视觉I.引言本文比较和对比了在视觉序列中跟踪移动目标的三种计算机视觉算法。
对于很多无人驾驶车辆(A V)来说,在复杂背景中检测和跟随移动目标的应用是至关重要的。
例如,这可以让一个全尺寸无人驾驶车辆跟踪行人或者移动车辆并避免与之相撞。
同时对于机器人而言,这项技术也可以提升导航性能和增强安全性。
对单个移动目标的良好隔离,将便于我们针对感兴趣的目标进行应用开发。
而所有的这些应用都要求我们能够实时的处理全彩色的视频序列。
我们的工作是在基于先驱者P3-AT全地形机器人的无人驾驶车辆测试平台上进行的,它是一个英国项目的一部分。
这个庞大的项目是由国防科学技术中心(DTC)下辖的无人系统工程(SEAS)为了开发新型无人驾驶车辆传感器技术而建立的。
国防科学技术中心的无人系统工程是由英国工业联盟操作管理,旨在通过采取系统工程的方法在整个系统和子系统层次上,研究有关无人系统的创新性技术,以此达到利用科学技术进步促进军事能力发展的目的。
基于均值漂移聚类的运动目标检测

基于均值漂移聚类的运动目标检测牛强强;陈松;马晋飞;魏建猛【摘要】In order to reduce the impact of noise on moving target detection effectively. This paper presents a Mean Shift clustering methodto detect the moving target. Firstly, noise in three consecutive frames image is removed by using the Mean Shift algorithm, tThen, image edge extraction is done, and the three-frame-differencing method is used forthe three consecutive frames image to get the moving object. Experimental resuhs show that this method can restrain the noise and extract the moving target effectively.%为了有效减少噪声对运动目标检测的影响,提出了一种利用均值漂移聚类实现运动目标检测的方法。
首先运用MeanShift算法分别对三帧连续图像进行平滑去噪处理,然后对图像进行边缘提取,最后通过三帧差分法对三帧图像进行差分,进而得到运动目标。
实验结果表明,该方法可以有效地抑制噪声并提取出运动目标。
【期刊名称】《微型机与应用》【年(卷),期】2011(030)020【总页数】4页(P50-53)【关键词】运动目标检测;均值漂移;三帧差分;聚类【作者】牛强强;陈松;马晋飞;魏建猛【作者单位】重庆交通大学信息科学与工程学院,重庆400074;重庆交通大学信息科学与工程学院,重庆400074;重庆大学计算机学院,重庆400044;重庆交通大学信息科学与工程学院,重庆400074【正文语种】中文【中图分类】TP391运动目标检测是计算机视觉、模式识别和数字视频处理领域的一个重要课题。
图像处理中的去噪算法及实现方法研究探讨

图像处理中的去噪算法及实现方法研究探讨图像去噪作为图像处理领域中的一个重要任务,旨在减少或消除图像中的噪声干扰,提高图像的质量和清晰度。
在实际应用中,图像经常会受到多种因素影响而产生噪声,例如图像采集设备的传感器噪声、传输过程中的信号干扰以及图像采集过程中的振动或者焦距不准等。
本文将研究和探讨图像处理领域中常用的几种去噪算法及其实现方法。
1. 均值滤波算法均值滤波是图像去噪领域中最简单和常用的算法之一。
该算法基于邻域像素的平均值来估计当前像素的值。
在均值滤波算法中,采用一个滑动窗口扫描整个图像,计算窗口内像素的平均值并将其作为当前像素的估计值。
均值滤波算法简单易实现,通过平均化像素值的方法可以减少噪声。
然而,该算法不能完全去除噪声,同时也会造成图像细节的模糊。
2. 中值滤波算法中值滤波算法是一种常用的非线性滤波方法,它采用邻域窗口内像素的中值来作为当前像素的估计值。
该算法适用于去除椒盐噪声等不规则噪声。
中值滤波算法不像均值滤波算法会造成图像模糊,能够有效保留图像细节。
然而,中值滤波算法对于高斯噪声等连续噪声的去除效果较差。
此外,中值滤波算法的计算复杂度较高,对于大尺寸图像处理时速度较慢。
3. 小波去噪算法小波去噪算法是一种基于小波变换的信号去噪方法。
小波变换将信号分解为多个不同尺度的频带,通过分析各频带信号的特性,可以有效去除噪声。
小波去噪算法包括两个主要步骤:信号分解和阈值处理。
首先,利用小波变换将图像分解为多个频带,然后通过对各频带的系数进行阈值处理,将系数小于阈值的置零,再将处理后的系数进行反变换得到去噪后的图像。
小波去噪算法能够较好地去除各种类型的噪声,但在实际应用中阈值的选择较为困难。
4. 域值滤波算法域值滤波算法是一种基于像素值差异的去噪方法。
该算法通过计算像素值之间的相似度来判断是否为噪声,并根据相似度对图像像素进行修复。
域值滤波算法的核心思想是相似像素的值在局部空间中较为接近,而噪声像素的值则与周围像素差异较大。
《卡尔曼与均值漂移在动态目标跟踪中的应用研究》范文
《卡尔曼与均值漂移在动态目标跟踪中的应用研究》篇一一、引言动态目标跟踪是计算机视觉领域中一项重要的研究课题,广泛应用于智能监控、无人驾驶、人机交互等多个领域。
卡尔曼滤波器和均值漂移算法作为两种有效的目标跟踪方法,在动态目标跟踪中发挥着重要作用。
本文将详细探讨卡尔曼滤波器和均值漂移算法在动态目标跟踪中的应用研究。
二、卡尔曼滤波器在动态目标跟踪中的应用卡尔曼滤波器是一种高效的递归滤波器,它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。
在动态目标跟踪中,卡尔曼滤波器通过预测和更新两个阶段,对目标的位置进行估计。
预测阶段根据系统的动态模型和上一时刻的状态估计值,预测当前时刻的状态;更新阶段则根据当前时刻的观测值和预测值,计算出当前时刻的最优估计值。
卡尔曼滤波器在动态目标跟踪中的应用具有以下优点:1. 能够处理含有噪声的观测数据,提高目标跟踪的准确性。
2. 能够适应目标的运动状态变化,包括目标的加速、减速、旋转等。
3. 计算量小,实时性好,适用于对实时性要求较高的场景。
三、均值漂移算法在动态目标跟踪中的应用均值漂移算法是一种基于密度的目标跟踪算法,它通过计算目标区域与周围区域的颜色直方图差异,确定目标的运动方向和速度。
在动态目标跟踪中,均值漂移算法通过迭代优化目标区域的位置,实现目标的稳定跟踪。
均值漂移算法在动态目标跟踪中的应用具有以下优点:1. 对光照变化和部分遮挡具有较好的鲁棒性。
2. 能够处理复杂的背景环境,包括颜色变化、纹理变化等。
3. 适用于多种场景下的目标跟踪任务。
四、卡尔曼与均值漂移的融合应用卡尔曼滤波器和均值漂移算法在动态目标跟踪中各有优势,为了充分发挥两者的优点,可以将两者进行融合应用。
具体而言,可以利用卡尔曼滤波器对目标的运动状态进行预测和更新,同时利用均值漂移算法对目标区域进行迭代优化。
这样可以在保证实时性的同时,提高目标跟踪的准确性和鲁棒性。
卡尔曼与均值漂移的融合应用具有以下优点:1. 结合了卡尔曼滤波器的预测能力和均值漂移算法的优化能力,提高了目标跟踪的准确性。
基于前向查找和均值漂移的点模型鲁棒降噪算法
的没有离群点的邻域开始 ,用 LM S估计出初始化模型 ,然后
迭代优化该模型 ,迭代过程每次增加一个较低残差的采样点
来估计模型的参数 。在迭代过程中 ,我们通过监测一些参数
来确定那些有影响的点 。通常的做法是在迭代过程中先增加
那些好的样本 ,当好的样本用完时 ,才增加离群点样本。 A tkinson等人 [2 ]提出了用残差图方法来监测算法的几个统计 量。
Fleishman等人 [11 ]和 Jones等人 [12 ]在文献 [ 13, 14 ]的基 础上 ,将用于数字图像处理的双边滤波器扩展到三维网格模 型的降噪上 ,此后 , Choudhury等人 [15 ]又提出了三边滤波器算 法 ,把滤波窗口限制在梯度相近的区域 ,三边平滑输出采样点 的位置和法向量信息 。该算法克服了双边滤波器因 静态窗口函数而产生“削去 ”模型尖锐特征的缺点 , 取得了较好的滤波和特征保持效果 。上述以双边滤 波器为基础的算法都被认为是鲁棒的统计算法 ,但 它们在保持特征边时将该边所在的两个平面都进行 存储 ,不是只保存其中的一个 ;而我们的算法先检测 出这两个平面 ,滤波处理后进行曲面合成 ,就可更好 地保持模型的尖锐特征边界 。
( yangj@mail. lzjtu. cn) 摘 要 :针对点模型提出了基于前向查找和均值漂移两种鲁棒统计方法的滤波算法 。前向查找 算法根据残差图自动检测离群点 ,并将输入的点云数据划分为多个不带离群点的最优局部降噪邻域 。 对局部邻域进行加权协方差分析 ,估计出该邻域的最小二乘拟合平面 。在局部邻域内估计采样点的 核密度函数并通过均值漂移算法计算它的局部最大值点 ,核密度函数的局部最大值点确定了点云数 据的聚类中心并能准确逼近采样点曲面 ,将每一个采样点漂移到密度函数的局部最大值点 ,使点云曲 面收敛为一个稳定的三维数字模型 。实验结果表明 ,本文的算法是鲁棒的 ,能在有效剔除点模型表面 噪声的同时较好地保持模型表面的尖锐特征 。 关键词 :前向查找算法 ;均值漂移算法 ;协方差分析 ;非参数核密度估计 ;离群点 中图分类号 : TP391. 41 文献标识码 : A
基于均值漂移的舌体分割算法
基于均值漂移的舌体分割算法刘静;仇大伟【摘要】本文针对舌体图像的特点,提出了一种基于均值漂移的舌体图像分割算法.该算法首先对输入图像进行平滑,可有效消除舌苔裂纹和色块噪声对舌体分割的干扰,然后根据空域和值域的邻近性原则进行聚类,根据聚类结果对舌体图像进行分割.实验结果表明,对不同的舌体图像进行分割,分割结果符合中医医师的诊断要求,对有噪声的图像,该方法也可较好地实现舌体分割.【期刊名称】《山东科学》【年(卷),期】2014(027)002【总页数】5页(P58-62)【关键词】舌体分割;均值漂移;核方法;聚类【作者】刘静;仇大伟【作者单位】山东中医药大学理工学院,山东济南250355;山东中医药大学理工学院,山东济南250355【正文语种】中文【中图分类】TP391.41舌诊是中医“望诊”的主要内容之一,通过对舌象的变化进行观察,了解人体的病理变化,其诊断方法为历代中医名家所重视,是辩证论治的主要依据[1]。
然而,中医诊断受医生的临床经验、环境等主客观因素的影响,诊断效果会有很大不同。
应用图像处理技术,建立舌诊信息的客观、量化识别方法,实现中医舌诊的客观化,对中医现代化具有重要意义[2-4]。
利用计算机技术对舌象特征进行分析之前,首先要将舌体区域分割出来,分割的效果将直接影响对舌象特征分析的准确性[1]。
近年来主要的舌体分割技术可以归纳为4类,即区域分割技术[4]、边缘检测技术、Snake算法[5]和特定理论工具分割[6-8]。
研究者们应用上述技术,取得了一定效果,但仍然存在一些问题,主要表现在[3]:(1)舌的颜色与脸的颜色,特别是嘴唇的颜色相近,造成不能准确分割舌体图像;(2)舌本身作为软体,无固定形状,因此其边缘提取较为困难;(3)从医学角度来讲,舌本身并不平滑,颜色也各不相同,且有色块噪声。
均值漂移(Mean Shift)是一种非参数概率估计方法,由Fukunaga等[9]于1975年首次提出。
均值滤波及其改进算法去噪效果研究
均值滤波及其改进算法去噪效果研究孔祥阳;徐保根【摘要】噪声对图像处理的影响是不容忽视的,它对图像处理的输入、采集和处理等各个环节以及输出结果都有不同程度的影响.因此,对图像进行去噪预处理是数字图像处理中进行其它图像处理前的一项基本而又十分关键的技术.均值滤波是常用的一种预处理方法.主要对均值滤波及其改进算法的去噪效果进行研究,比较它们在处理不同的噪声时的视觉效果和量化结果.【期刊名称】《商丘师范学院学报》【年(卷),期】2016(032)006【总页数】5页(P21-25)【关键词】均值滤波;算法;去噪;图像处理【作者】孔祥阳;徐保根【作者单位】四川工程职业技术学院基础教学部,四川德阳 618000;华东交通大学数学系,江西南昌 330013【正文语种】中文【中图分类】TN911.73从“眼见为实”、“百闻不如一见”等这些俗话中不难知道图像在人们日常生活中所起的重要作用.更有研究表明人类获取的知识约有83%来自于视觉.因此,数字图象处理技术自产生之后就获得飞速的发展.特别是随着计算机技术的进步和数码产品及各类数字产品的普及,数字图像处理也已成为综合多个学科、多个技术领域综合性技术.通常所说的数字图像是采用离散数字来表示其空间坐标和幅度的图像.在利用图像采集设备将获得的图像信息转化为数字电信号并进行特定的处理,从而为人们的生产、生活服务的过程就称为数字图像处理.而在获取所需要的有效图像信号过程中,不可避免的会出现一些不必要的信号,这些信号通常称之为噪声.在不同的图像采集过程中,图像噪声的来源也有所不同.如电气设备,天体放电现象等引起的噪声,由光和电的基本性质所引起的噪声,电器的机械运动产生的噪声,器材材料本身引起的噪声以及系统内部设备电路所引起的噪声等[1].而噪声对图像处理的影响是不容忽视的,它对图像处理的输入、采集和处理等各个环节以及输出结果都有不同程度的影响.因此,对图像进行去噪预处理是数字图像处理中进行其它的图像处理前一项基本而又十分关键的技术[2].为了消除或降低噪声,从而获取更准确的原始信息,选取适当的图像去噪预处理算法成为后续处理的关键.其中,滤波技术是常用的技术.图像滤波技术在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制的技术,是图像预处理中不可缺少的操作,其处理效果的好坏将直接影响到后续图像处理和分析的有效性和可靠性.因此,本文主要研究在图像去噪预处理过程中均值滤波及其改进算法的原理及去噪效果.为了下面叙述的方便,这里规定f(x,y)为无噪图像,n(x,y)为噪声,S为(x,y)邻域内的点集,M为S内点的个数.另外,噪声分加性噪声和乘性噪声,本文只考虑加性噪声,因为大部分乘性噪声可以通过对数变换变为加性噪声.去噪方法的好坏一方面可以从视觉上进行判别,但视觉判别又有一定的局限性,因此,另一方面还需要用量化指标进行判别.本文所用的量化评价指标包括峰值信噪比(PSNR)[3]和结构相似度(SSIM)[4].前者是用来对模拟实验从灰度相似性方面的结果的定量评估,后者是基于人类视觉系统对目标物体结构的敏感性.两者定义如下:其中,MN是图像的总像素数.u和分别代表原清晰图像与去噪后的图像,μu、σu和分别代表原清晰图像和去噪后的图像平均灰度值以及标准差.代表原清晰图像和去噪后的图像之间的协方差.C1和C2是常数,防止不稳定的结果.1.1 算术均值滤波[5]算术均值滤波是最简单的线性空域滤波算法,也称为移动平均法,是最简单的去噪方法.它是用图像f(x,y)目标像素(x,y)周围n×n(n=3,5,7,…)像素范围的平均值替换该像素值的方法.其原理可描述为,假设得到的含噪图像为f′(x,y)=f(x,y)+n(x,y),经局部平均后的图像为平滑后的噪声方差为其中,为噪声方差.可见,经均值滤波操作后的噪声方差为之前的.该方法运算速度快,结果较好,实现起来比较方便.但是,它也会使图像变得模糊,尤其是图像边缘.因此,该方法不能保持锐利边缘.1.2 几何均值滤波如果采用几何均值滤波,则复原后的图像为1.3 两种滤波效果比较分析从图1不难看出,虽然两种滤波结果都造成图像的模糊,但是几何均值滤波在人物的头发部分出现更多的黑点,并且整体亮度偏暗.而从表1的量化对比来看,算术均值滤波结果要稍好于几何均值滤波.因此,在图像预处理阶段,算术均值滤波使用更加广泛.2.1 谐波均值滤波如果采用谐波均值滤波,则复原后的图像为2.2 逆谐波均值滤波如果采用逆谐波均值滤波,则复原后的图像为其中,R是滤波器的阶数.其中,当R=0时即为算术均值滤波器;当R=-1时即为谐波均值滤波器;通过对图像只添加椒盐噪声进行实验结果可知,谐波滤波器对“盐”噪声、高斯噪声效果比较好,但对“胡椒”噪声效果不是很好.而逆谐波均值滤波在R>0时,可以用来消除“胡椒”噪声;在R<0时,可以用来消除“盐”噪声.2.3 修正阿尔法均值滤波为了消除极大或极小值对均值结果的影响,可以假设将邻域中最高灰度值的和最低灰度值的去掉,对余下的M-d个元素(记为fr(x,y))取算术均值,此方法称为修正阿尔法均值滤波.滤波后的图像为d=0,退化为算术均值滤波,退化为中值滤波.d取其它值时,该方法结合了均值与中值的优点,对混合噪声去除的效果好.2.4 自适应均值滤波算术均值滤波器在对图像进行处理时,并未充分考虑图像的局部特征的变化,由此,有学者提出了自适应均值滤波器.由于均值可以度量区域图像的平均灰度,而方差可以度量区域的对比度,所以基于自适应均值的恢复图像为其中表示所加噪声的方差,mL和分别表示(x,y)邻域内的局部均值和方差.2.5 边缘保持均值滤波[6]边缘保持均值滤波是在像素的邻域内选取若干个模板,然后对这些模板求方差,选取方差最小的模板,将其均值作为目标像素的值,由此可以消除噪声.这里选取9个模板进行实验,实验结果如下:该方法在消除噪声的同时不仅可以保持边缘,而且可以增强边缘.在边缘检测和区域生成中很有效,但是处理时间较长.2.6 非局部均值滤波非局部均值去噪充分利用自然图像的冗余性,是空域滤波的一个重大突破,它是由Buades等人提出的[7,9],其基本思想是:当前像素点的灰度值与图像中所有与其结构相似的像素点加权平均得到.结构相似的像素点的选择,也即权值系数的确定是通过对于每一个像素点的权值,采用以该像素点为中心的图像子块(7×7)或(9×9)与当前像素点为中心的子块之间的高斯加权欧氏距离来计算得到的.与前述方法比较可知,非局部均值滤波方法无论是对高斯噪声还是椒盐噪声的去噪效果都较之前的算法有很大的提高.因此,该方法自产生之后,一直被广泛使用[8-11].本文从基本算术均值滤波和几何均值滤波开始,从视觉效果和量化结果两方面分别研究了几种均值滤波在去噪方面的性能,并总结了它们在处理不同噪声时的能力.为进一步研究均值滤波的其它更好的去噪效果的变形提供思路和方向.【相关文献】[1]Rafael Gonzalez, Richard E.Woods,Steven L.Eddins.数字图象处理MTLAB版[M].北京:电子工业出版社,2005.[2]TonyF.Chan,Jianhong(Jackie)Shen.图像处理与分析[M].北京:科学出版社,2011.[3]Wang Z, Bovik AC,Sheikh HR.Image quality assessment: From error visibility to structura l similarity[J].IEEE Trans.Image Process., 2004,13(4):600-612.[4]Wang Z,Bovik AC.Mean squared error: Love it or leave it?—A new look at signal fidelity measures[J].IEEE Signal Process.Mag., 2009,26(1):98-117.[5]孙明.数字图象处理与分析基础-MATLAB和VC++实现[M].北京:电子工业出版社,2013.[6]王晅,马建峰.数字图像分析与模式识别[M].北京:科学出版社,2011.[7]Buades A, Coll B, Morel J M.A non-local algorithm for image denoising[J].IEEE Computer Vision and Pattern Recognition,200 5, 2: 60-65.[8]Tianning Li , Peng Wen, Sophie Jayamaha.Anaesthetic EEG signal denoise using improv ed nonlocal mean methods[J].Australasian Physical & Engineering Sciences in Medicine, 2 014, 37(2):431-437.[9]Buades A, Coll B,Morel JM. “Nonlocal image and movie denoising[J].International Jour nal of Computer Vision, 2008, 76(2):123-139.[10] Lou Y, Zhang X,Osher S,Bertozzi A.Image recovery via nonlocal operators[J].Journal of Scientific Computing, 2010,42(2):185-197.[11]Grewenig S,Zimmer S,Weickert J.Rotationally invariant similarity measures for nonlocal image denoising[J].Journal of Visual Communication and Image Representation, 2011,22( 2):117-130.。
基于均值计算的MSK-SVD图像去噪方法
基于均值计算的MSK-SVD图像去噪方法焦莉娟;王文剑;赵青杉;曹建芳【摘要】为解决K-SVD图像去噪算法运算复杂、去噪效率低的问题,提出一种基于平均计算的快速K-SVD图像去噪算法.采用分簇去噪的思想,按照灰度方差将图像分为背景簇和内容簇两部分;用平均计算预处理策略消除噪声对图像分簇精度的影响;用均值滤波对背景簇去噪,K-SVD算法对内容簇去噪,结合均值滤波的去噪速度快以及K-SVD算法去噪效果好的优势.实验结果表明,该算法保留了K SVD去噪效果好的优势,在去噪效率上较原算法有明显的改善.%To solve problems of complex matrix operations and inefficiency of K singular value decomposition in image denoising,a mean based speeded up K-SVD algorithm which improved the efficiency was proposed.Thought of clustering denoising was presented to divide an image into two clusters according to gray variance,the smooth one which was denoised using mean filter and context one which was denoised using K-SVD were taken advantage of.Results of extensive experiments show the proposed method achieves the state-of-the-art denoising performance.【期刊名称】《计算机工程与设计》【年(卷),期】2017(038)012【总页数】5页(P3380-3384)【关键词】K奇异值分解;图像去噪;贪婪算法;稀疏去噪;压缩感知【作者】焦莉娟;王文剑;赵青杉;曹建芳【作者单位】忻州师范学院计算机系,山西忻州 034000;山西大学计算机与信息技术学院,山西太原 030006;忻州师范学院计算机系,山西忻州 034000;忻州师范学院计算机系,山西忻州 034000【正文语种】中文【中图分类】TN911.72目前常用的图像去噪方法有均值滤波、中值滤波、小波滤波等[1-5]。
MATLAB应用在基于噪声检测的图像均值去噪法
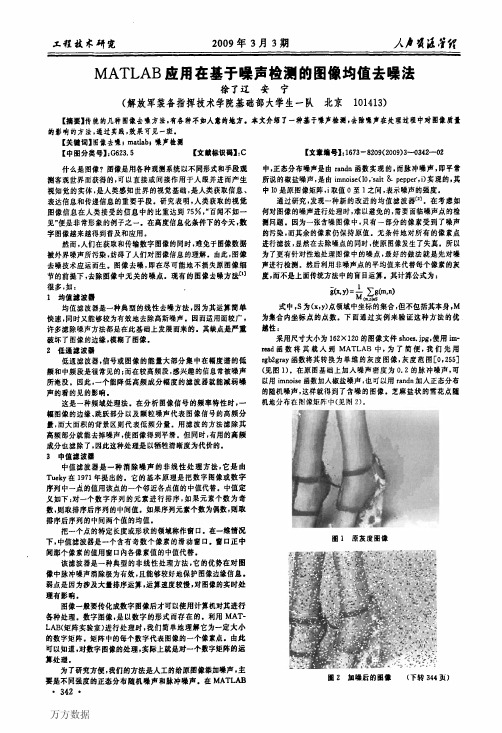
为了研究方便,我们的方法是人工的给原图像添加噪声·主 要是不同强度的正态分布随机噪声和脉冲噪声.在MATLAB
图1原灰度图像
固Z加噪后的图像
(下转344页)
万方数据
工程技术研究
2009年3月3期
久夕嚷;夏,警钾
工作原理:上图(a)所示为KGPSl00/1型中频电源装置中 所采用的并联谐振逆变器主电路,它属于电流型逆变器。逆变 桥由4个晶闸管桥臂VnVn组成,因工作频率较高,故采用KK 塑快速晶闸管.LlL吖为4只电感量较小的桥臂电感,用于限制 电流上升率di/dt。感应线圈L、R和电容C并联组成负载谐振
i仉y)=击毒≥(m,n)
式中,S为(x,y)点领域中坐标的集合,但不包括其本身,M 为集合内坐标点的点数.下面通过实例来验证这种方法的优 越性:
采用尺寸大小为162×120的图像文件shoes.jpg。使用im- 眦d函数将其载人到MATLAB中,为了简便.我们先用 瑁b29ray函数将其转换为单维的灰度图像,灰度范围[o,255] (见图1)。在原图基础上加入噪声密度为o.2的脉冲噪声,可 以用imnoise函数加入椒盐噪声,也可以用randn加入正态分布 的随机噪声,这样就得到了含噪的图像。芝麻盐状的雪花点随 机地分布在图像矩阵巾(见图2)。
研究了基于小波变换的图像增强,先分析了图像增强的基本方法,然后将图像增强放入小波域中去研究,并提出了一种新的小波变换自适应图像增 强算法,在Matlab环境中验证了该算法的可行性和优越性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
均值漂移去噪算法的研究
近年来,以机器学习和大数据为代表的人工智能技术在各个领域发挥着重要作用,其在去噪方面也取得了良好的成果。
均值漂移去噪(Mean Shift Denoising)算法是其中的一种,它由美国斯坦福大学王宇等人于1996年提出,并于2002年发表了论文《均值漂移去噪算法》,是一种能够有效去除图像噪音的技术。
本文将研究均值漂移去
噪算法,其主要原理和应用。
一、均值漂移去噪算法简介
均值漂移去噪算法是一种去除噪音的技术,其基本思想是在噪声点周围迭代寻找平均值点,并将其自身像素值更新为平均值点的像素值。
这种算法的主要思路是,首先确定一个像素点A作为去噪的中心,然后先计算A点的灰度值,通过该点灰度值的计算,获取A点周边的像素点的灰度和,并加上A点的灰度值,得到新的平均值点,然后将A点的像素值更新为新的平均值点。
按照这种思路,每个像素点都进行迭代,最终以某个像素点为中心,形成一个均值漂移集合,从而实现去噪效果。
二、均值漂移去噪算法原理
图像中噪声点的产生有不同的原因,有时是由摄像机失真、曝光过长或过短等原因所引起的,有时是由图像的采集过程中产生的噪声,有时则是因为图像的传输过程中受干扰而产生的。
均值漂移去噪算法通过迭代地更新噪声点的像素值,使其与其周围像素的平均值相匹配,从而实现去噪效果。
更新算法的核心思想是,假定存在一个像素点A,A点的灰度值是S,A点的邻域中有N个像素点,设这N个像素点的灰度值分别是S1,S2……Sn,则,A点的灰度值更新结果为:更新后的像素点A的灰度值=(S1+S2+…+Sn)/N。
根据这个原理,均值漂移去噪算法的具体实现步骤为:
(1)对图像中的每个像素,计算其邻域内的像素点的灰度值,求出其邻域内所有像素点的平均值。
(2)更新每个像素点的像素值,使其与邻域内像素点的平均值相等。
(3)重复迭代像素的更新,直到去噪结束。
三、均值漂移去噪算法应用
均值漂移去噪算法作为一种实用的非确定性去噪算法,以其具有高效、节约计算资源、较好的去噪效果以及基本无需参数设置等特点。
在图像处理领域,其主要应用于图像去噪、图像去模糊、图像去色斑、图像自适应亮度等多种任务。
均值漂移去噪算法应用实例如下:(1)图像去噪:图像去噪的目的是减少噪声点的影响,恢复出更清晰的图像内容,因此,均值漂移去噪算法也可以用于图像去噪,将噪点的灰度值从原来的值漂移到周围像素点的平均灰度值,从而达到减少图像噪声的目的。
(2)图像去模糊:均值漂移去噪算法也可以用于图像去模糊处理,它的原理使图像更清晰,使模糊的像素点像素值漂移到邻域内像素点的平均灰度值,从而达到图像去模糊的目的。
(3)图像去色斑:色斑是由图像处理过程中图像曝光过长或过短而导致的,用均值漂移去噪算法可以将以图像曝光过长或过短引起的色斑进行漂移,使其与图像的原始色度平均值接近,从而实现图像去色斑的效果。
(4)图像自适应亮度:均值漂移去噪算法可以用于图像自适应亮度,即根据图像中不同灰度值区域的像素点进行更新,从而调整图像的亮度,使其全局的灰度分布更加均匀。