田间除草机械综述
玉米除草装置的设计与试验
玉米除草装置的设计与试验
阚立民;赵胜雪
【期刊名称】《中国农机装备》
【年(卷),期】2024()1
【摘要】针对玉米田间机械除杂草问题,研究设计了一种新型的指轮式玉米除草装置,同时去除玉米行间和株间杂草。
该装置配置有株间及行间杂草分离组件,能对株间和行间杂草及土壤进行同步剪切和翻耕操作,协同除草部件完成除草作业,确保了作业的高效性。
田间试验结果表明,当机具作业速度控制在1.8m/s时除草效果最好,除草率平均在90%左右,且伤苗率仅为3.8%。
【总页数】4页(P32-35)
【作者】阚立民;赵胜雪
【作者单位】黑龙江八一农垦大学工程学院
【正文语种】中文
【中图分类】S45
【相关文献】
1.中耕期玉米田间避苗除草装置设计与试验
2.凸轮摇杆式摆动型玉米株间除草装置设计与试验
3.履带式果园除草机除草装置的设计试验
4.水田除草机用可避苗株间除草装置的设计与试验
5.玉米除草机器人视觉导航系统设计与试验
因版权原因,仅展示原文概要,查看原文内容请购买。
割草机的分类及应用
割草机的分类及应用割草机又称除草机、剪草机、草坪修剪机等,是一种用于修剪草坪、植被等的园林机械工具,主要由刀盘、发动机、行走轮、行走机构、刀片、扶手、控制等部分组成。
工作原理是发动机的高速旋转,带动刀片或尼龙绳做旋转运动,将草、小型灌木等切断,从而节省了除草工人的作业时间,减少了大量的人力资源。
提高除草效率,深受园林工人喜欢。
割草机种类繁多,主要有以下几种: 1 侧挂式割草机在园林绿化中,侧挂式割草机应用最为广泛,主要适合平地、地形复杂的区域使用,也可用于收割稻谷、玉米、牧草等农作物作业,对草的要求不高,各种草都可以收割,换上合金刚刀片,还可以收割小型灌木(直径小于15mm)。
优点是:操作简单,使用方便,省油。
缺点:收割速度慢,设备侧挂在身上,操作工人比较辛苦。
2 背负式割草机与侧挂式割草机类似,只是设备背在身上,靠软轴传递动力,主要适合果园,平地操作,割除的草是混乱的。
优点:使用方便,收割速度度慢,操作工人比较辛苦。
3圆盘割草机这类机器分四轮拖拉机安装与微耕机安装,收割效果:割的草倒在二个圆盘中间,收割草的高度:10-100m,特别适合收割软草,太硬的草无法收割,对动力要求高,市场上以四轮拖拉机安装为主。
收割的速度快,适合果园应用,在我国西部部分地区收割苜蓿用的比较多。
4 割稻机主要收割水稻,小麦等硬杆农作物,像玉米杆,烟杆等高杆农作物也可以收割。
优点:收割后的农作物可以整齐的排放,收割速度快,缺点:不可以收割软草。
5 绿篱机适合山坡地,水库坝的斜地,可以割短草,20cm以下的草,也可以割高草。
在城市中主要用于黄杨、冬青等绿化带修剪,也可以修剪黄杨球等绿植。
6 手推式割草机手推式割草机也叫草坪修剪机,广泛应用在学校、足球场、公园、小区等草坪修剪。
割草机安装有四个车轮,割草时可轻松前行。
调整刀盘离地高度,以便控制草坪高度。
割草机后面设有集草袋,方便收集割下来的草。
随着我国国民经济的高速发展,我们应借鉴国外草坪机的发展经验,向高速度、多功能、自动化方向发展适合我国国情的园林机械。
介绍几种常用土壤耕作机械的结构与特点

介绍几种常用土壤耕作机械的结构与特点土壤耕作机械是农业生产中常用的机械设备,用于翻耕土壤、松土、除草、驱除害虫等。
根据用途和特点的不同,土壤耕作机械可以分为不同种类,包括耕地机、旋耕机、开垄机、松土机等。
接下来,我们将详细介绍几种常用的土壤耕作机械的结构和特点。
一、耕地机耕地机是一种常用的土壤耕作机械,主要用于耕地犁耕、软土深翻和残留作物翻覆。
它由刀头、插刀、转轴、机架和行走轮等部件组成。
其特点包括结构简单,使用方便,工作效率高,耕地深度可调节。
耕地机的刀头一般采用锥形或犁形设计,能够有效破碎土壤,改善土壤通气性和保水性,增加土壤肥力。
在耕作过程中,耕地机可根据需要调节耕深和速度,适用于不同类型的土壤和作物。
二、旋耕机旋耕机是一种利用耕作器旋转犁耕土壤的机械设备,常用于果园、蔬菜地和烟叶地的耕作。
其主要结构包括机架、传动装置、耙刀组和行走装置等部分。
旋耕机的特点是操作简便,效率高,工作深度可调节,能够破碎土壤、松土、除草、改良土壤结构,提高土壤肥力。
旋耕机的耙刀组通常采用耙刀和耙壳相结合的形式,能够有效地破碎土壤,提高土壤的透气性、保水性和肥力,有利于植物生长和发展。
三、开垄机开垄机是一种用于开垄、培土和覆盖作物根系的机械设备,常用于果树园和蔬菜地的土壤耕作。
其主要结构包括机架、行走轮、开垄刀、培土器和覆土板等部分。
开垄机的特点是操作简便,工作效率高,能够有效地开垄、培土、覆盖作物根系,促进作物生长和发育,提高作物产量和品质。
开垄机的开垄刀通常采用铲形或刀形设计,能够有效地开垄和培土,有利于保护作物根系,提高作物的吸收养分能力和抗旱抗逆性。
四、松土机松土机是一种用于松土、破碎土块、改良土壤结构的机械设备,常用于种植大田作物和绿化地的土壤耕作。
其主要结构包括机架、行走轮、旋转刀盘、搅齿等部分。
松土机的特点是操作简便,工作效率高,能够有效地破碎土块、改良土壤结构、提高土壤通气性、保水性和肥力,有利于植物的生长和发展。
灭茬机简介介绍

灭茬机的主要作用是破碎农作物残茬 ,改善土壤结构,提高土壤肥力,同 时减轻环境污染。
灭茬机的历史与发展
灭茬机的起源
灭茬机起源于20世纪初的欧美国家,当时由于农业机械化程 度的提高,人们开始尝试使用机械方式处理农作物残茬。
灭茬机的发展
随着农业技术的不断发展和农业机械化的普及,灭茬机逐渐 成为一种重要的农业机械,并经历了多次技术改进和升级换 代。
灭茬机的应用范围
灭茬机的应用范围
• 灭茬机是一种农业机械,主要用于农作物残茬的处理,如根茬、秸秆等。它通过机械方式将残茬粉碎,使其与土壤充分混 合,从而改善土壤结构和提高土壤肥力。
04
灭茬机的优缺点分析
灭茬机的优缺点分析
• 灭茬机是一种农业机械,主要用于翻耕和破碎残留在土壤中 的作物根茬,以促进土壤的疏松和改善土壤结构,进而提高 农作物的生长效果和产量。下面将详细介绍灭茬机的优缺点 、适用范围及使用注意事项。
05
灭茬机的发展趋势与未 来展望
灭茬机的发展趋势与未来展望
• 灭茬机是一种农业机械,主要用于翻耕和破碎根 茬,以便于后续的播种、施肥和灌溉等作业。以 下是灭茬机的基本介绍
06
灭茬机使用案例分享与 实际应用效果展示
灭茬机使用案例分享
案例一
某地区农场使用灭茬机进行大豆田的根茬处理,通过使用灭茬机,不仅提高了 作业效率,还降低了人工成本。
案例二
某种植合作社在小麦田中使用灭茬机,成功实现了根茬的快速处理,同时提高 了小麦的产量和品质。
灭茬机实际应用效果展示
效果一
通过使用灭茬机,可以大幅度提高根茬处理效率,减少人工劳动强度,降低生产 成本。
效果二
灭茬机的使用可以改善土壤结构,增加土壤有机质含量,有利于农作物的生长。
文献综述-收割机械
收割机械第一节概述作物收获是整个农业生产过程中夺取高产丰收的最后一个重要作业环节,对谷物的产量和质量都有很大的影响,其特点是季节性强、时间紧、任务重,易遭受雨、雪、风、霜的侵袭而造成损失。
因此,实现谷物收获作业机械化对于提高劳动生产率、减轻劳动强度、降低收获损失、以确保丰产丰收具有极其重要的意义。
一、国内外收获机械发展概况(一)国内收获机械的发展概况我国劳动人民在长期的生产实践中对收获工具有许多发明创造,据古书记载在三千五百年前已发明了镰刀,在十三世纪中叶创造了推镰等高效工具。
但这些成就在长期的封建和半封建、半殖民地的社会中得不到应有的发展及重视。
新中国成立后,相继在东北等地建立了国营农场,引进了国外先进的谷物收获机,我国谷物收获机是在此基础上逐渐发展起来的。
在近五十年的发展历程中,我国收获机械的发展速度很快,总结起来大致经历了以下几个发展阶段。
1.入门阶段(1949-1965年)这一阶段所完成的主要是引进和仿制工作。
1949年开始从前苏联引进C-6牵引式和C-4自走式联合收获机,此后又相继从其他国家引进一些机型。
牵引式机器有:联邦德国的克拉斯、兰茨、英国阿尔滨等;自走式机型有:前苏联C-4M、CK-3、捷克ZM330、匈牙利ACD330、波兰AC-400、英国福格森和联邦德国克拉斯等。
经过多年的试验选型和农场的实际使用,曾先后选定几种机型进行仿制,但最后投产的只有两种联合收割机机型,即1956年投产的GT-4.9牵引式联合收割机和1965年投产的东风ZKBD-3型自走式联合收割机。
尽管产品的数量不多、制造质量也不高,而且在此期间国内少数单位自行设计研制的一些小型联合收割机均未成功,但此时我国已初步掌握了联合收割机的生产和制造技术。
2.发展阶段(1966-1980年)这一阶段是我国联合收割机迅速发展的时期。
全国不仅涌现出一批新的专业联合收割机厂,而且还发展了相应的配套件厂,这些工厂通过扩建、技术改造,生产能力有了很大提高。
关于除草机器人的综述
关于除草机器人的综述摘要:随着农业生产的快速发展,农业生产技术急需发展,各种人工的生产已经不能满足需要。
随着各种科学技术的发展,在大田除草的生产环节上,智能型机器人的出现及其发展已融入我们的生活,从产生到现在,从国外到国内,从机械手到图像识别分析,到准确定位草的位置,通过对目前这个现状的综述,能更好的促进这个方向的发展。
进一步发展我国的农业生产水平。
关键词:除草机器人综述随着农业劳动力成本的提高,发达国家广泛开展了农业机器人研究。
近年,又开始了对除草机器人的研究。
瑞典、丹麦、荷兰等欧洲国家以及美国、日本等开展了杂草识别和除草机构的研究。
目前 , 在我国主要使用的除草方法是人工锄抚刀抚 , 其特点是劳动强度大、耗时费力、效率低、效果欠佳 , 除草工作完成后 , 幼林仍受不同程度的草害威胁。
但是国内对于除草机器人的研究正在起步,这其中机器人机械臂的运动学分析和图像识别又是比较关键的技术,以及除草方法的不断改进更使效率大大提高。
相信随着我国对对农业机器人的高度重视,我国在农业除草机器人的研究领域会取得重大的突破。
我国的农业生产能力家大大提高。
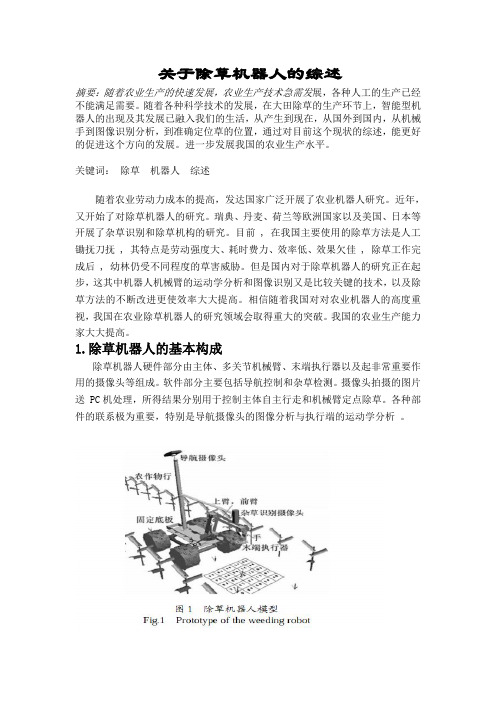
1.除草机器人的基本构成除草机器人硬件部分由主体、多关节机械臂、末端执行器以及起非常重要作用的摄像头等组成。
软件部分主要包括导航控制和杂草检测。
摄像头拍摄的图片送 PC机处理,所得结果分别用于控制主体自主行走和机械臂定点除草。
各种部件的联系极为重要,特别是导航摄像头的图像分析与执行端的运动学分析。
2.除草机器人的关键技术及其原理在除草机器人的设计和控制中,导航摄像头的图像分析和执行器的运动学分析,参数的输入控制与PC机软件的结合,还有除草方法的选择都具有极其重要的意义。
1)视觉图像分析及其导航利用机器视觉导航技术引导除草机器人沿着农作物行自动行走,行走时又利用机器视觉技术检测农作物行间杂草。
除草机器人多关节机械臂运动到杂草区域 ,切割杂草并涂抹除草剂,执行结束后再继续行走。
植保机械综述
对喷头的研究关键要解决喷射压力、喷射角、 雾滴大小、喷洒均匀性等与喷雾机械喷洒性能相关 的主要设计参数,并理清这些参数与喷头结构参数 的相互关系,从而实现对喷头结构参数的优化。
标,减少漂移量,节省农
药,保护环境。
喷头中两种新型的喷雾技术
一 抗漂移技术
由于非目标的雾滴飘移现象产生大量的问题,如污 染土壤、空气和水源,沉积在作物、家畜、树木中最 终对人类和动植物造成危害。因此,对环境质量要求 的不断提高必然要求对雾滴飘移有更清楚的认识,从 而有助于正确、安全、有效的使用农药。
调压阀的组成:
由调压轮、调节手柄、回水体、阀门、 推杆、弹簧托、弹簧等组成
空气室的工作原理:
活塞在排液行程中的高压药液,进入空气室, 使空气室上部的空气压缩,药液贮于空气室下部, 将能量贮存起来,不至对喷头有过大的冲击压力。 当活塞在吸液行程中,高压药液的压力,显著下降, 这时空气室内的压缩空气膨胀,使药液从空气室排 出,对药液增压,以补偿其降低的压力 。
③专业化程度低。 我国地域辽阔、地理及气象条 件多样,目前农业生产中主要的农作物品种,包 括粮食、纤维、油料、蔬菜、果树、糖烟、茶桑、 牧草、绿肥等8大类共达2000多种,每年发生的 主要病虫草害约有1600多种,目前植保机械品种 及保有量显然不能满足防治需求。
从世界植保技术发展趋势看,在今后相当长
雾滴尺寸是影响雾滴飘移的重要因素,在一定的 工作压力、流动速度下,喷头决定了雾滴粒谱的分布, 在喷雾质量的控制范围内选择产生大雾滴的喷头能控 制移。低漂移喷头就是通过一定的喷头结构设计使 喷头产生低漂移的较大雾滴,从而有效降低漂移。
铡草机综述.docx

铡草机的现状和应用作者:XXX指导教师:XXX(机械电子系机械设计制造及其自动化专业0503)摘要:我国是一个农业大国。
长期以来,畜牧业发展主要是依靠粮食和牧草,这已成为广大农民根深蒂固的传统认识,特别是近几年来,以粮食为主要饲料的猪禽养殖业迅速发展,人畜争粮的矛盾日益尖锐,难以协调。
进入九十年代,国务院提出了利用秸秆养畜,这是发展我国畜牧业的重大举措。
我国每年生产约 5.7亿吨作物秸秆。
这是一项巨大的饲料资源,而如何开发利用好农作物桔秆,这必然给秸秆伺料加工机械提出了新要求,我国秸秆加工机械起步较晚,但发展速度较快。
铡草机是较早定型并广泛推广使用的产品之一,该机型主要利用切割的工作原理来加工秸秆。
它具有结构简单、功耗低、生产率较高等特点,铡草机把秸秆切成段状,来满足喂饲需求。
我国把作物秸秆作为牛、羊等大家畜的饲料,加大了秸秆的利用率,在广大农村得到了较好的推广和应用,为缓解我国粮食供需矛盾作出了较大的贡献。
在未来一段时间,铡草机的设计方式是在计算机上用利用虚拟设计技术对铡草机进行模型化设计和运动仿真设计,在虚拟的状态下设计、制造、测试和分析产品,从而大大缩短设计和研发周期,降低了制造成本,提高生产效率,加快产品的生产和更新换代。
关键字:畜牧业;伺料;铡草机1. 引言我国是一个农业大国,人口多,底子薄。
长期以来,畜牧业发展主要是依靠粮食和牧草,这已成为广大农民根深蒂固的传统认识,特别是近几年来,以粮食为主要饲料的养殖业迅速发展,人畜争粮的矛盾日益尖锐,难以协调。
然而,我国每年生产的6亿多吨农作物秸秆仅有20 %左右被用作草食家畜的饲料,其余大部分被作为能源燃料或就地焚烧还田,或白白地焚烧掉弃之不用,不仅造成浪费,而且大量焚烧污染环境,甚至带来其他社会损失。
自20世纪50年代以来,我国把作物秸秆作为牛、羊等大家畜的饲料,加大了秸秆的利用率。
尤其是改革开放以来,这项工作越来越受到各级政府和领导的重视,在广大农村得到了较好的推广和应用,为缓解我国粮食供需矛盾作出了较大的贡献。
文献综述-秸秆粉碎机的发展现状及趋势
XX师范学院本科毕业设计文献综述秸秆粉碎机的发展现状及趋势院(系、部)名称:机电工程学院专业名称:机械设计制造及其自动化学生姓名:XX学生学号:XX指导教师:XXXX年 12 月 20 日XX教务处秸秆粉碎机的发展现状及趋势摘要:秸秆粉碎机是一种利用机械传动来传递能量,以实现秸秆粉碎还田的生产过程。
秸秆粉碎机主要应用在玉米秸秆粉碎还田的生产过程中。
国内秸秆粉碎机的技术水平达到了国际中等或较先进水平,但在一些技术含量较高的粉碎机中,某些关键技术,还要通过与国内外的企业或研究单位合作。
目前,我国的秸秆开发利用主要是从三个方面来进行的:一是秸秆还田,包括整株还田和粉碎还田两种:二是作为家畜饲料,包括直接饲喂、粉碎饲喂及氨化、青贮、微贮等处理后饲喂;三是作为相关工业原料利用,如用于造纸、制炭、编织等。
据统计,我国目前秸秆年产量约为6.2亿吨,利用率仅为33%,约2亿吨,而在这被利用的部分中,大部分未经处理,经过技术处理后利用的约为1600万吨,仅占被利用部分的2.6%。
一方面,土壤有机质含量在逐年减少;另一方面,大量的农作物秸秆被弃之不用,放火焚烧,既造成浪费又污染环境。
把多余的秸秆还到农田中去,是解决这个问题的有效途径。
关键字:粉碎机、技术水平、应用、发展趋势关键词变速箱;秸秆粉碎机;甩刀;结构及工作原理AbstractThe straw pulverizer is a method of using a mechanical transmission to transmit energy, to achieve the smashed straw production process. The straw pulverizer mainly used in corn stalk crushing and returning to field production process. Domestic straw crusher technical level reached the international advanced level of medium or lower, but in some high technology content of the pulverizer, some key technologies, but also by domestic and foreign enterprises or research unit cooperation. At present, our country straw utilization is mainly from three aspects: one is to include the entire plant straw, returning and crushing and returning to field two: two is used as livestock feed, including direct feeding, crushing feeding and ammoniation, silage, silage, feeding treated; three is used as industrial raw material utilization, such as used in paper making, charcoal making, weaving etc.. According to statistics, China's current annual output of about 6.2tons of straw, the utilization rate of only 33%, about 2tons, and in this use of section, the majority of untreated, after treatment and utilization of about16000000 tons, only used part of the 2.6%. On one hand, the content of soil organic matter decreased year by year; on the other hand, many crop straw to beabandoned, set on fire, causing both waste and environmental pollution. Superfluous straw return to field, is the effective way of solving this problem.Keywords gearbox;smashed straw ;Structures and working mechanism;1 前言饲料是发展畜牧业的物质基础,而饲料的生产加工水平决定着畜牧业发展的规模和速度,直接关系到农业和整个国民经济的发展。
文献综述
学院设计文献综述题目学院专业班级学号学生姓名指导教师完成日期文献综述正文:1、国外割草机发展在割草机出现以前,人们除草的主要工具就是镰刀,放牧牛羊也是保持草地平整的一个好方法。
随着高尔夫球、足球及网球等运动的兴起,人们对于没关平整的草地作为运动场地的要求越来越来迫切。
1805年英国人普拉克内特发明了第一台收割谷物并能切割杂草的机器,由人推动机器,通过齿轮传动带动旋刀割草,这就是旋刀割草机的雏形。
1830年,英国纺织工程师比尔.布丁取得了滚筒割草机的专利,1832年兰赛姆斯农机公司开始批量生产滚筒割草机,1902年英国人伦敦恩斯制造了内燃机做动力的滚筒式割草机,其原理至今还在使用。
在西方发达国家,20世纪初期,割草机就得到了快速的发展[10]。
从第一台滚刀式割草现世到现在已经有100多年的时间了,割草机的品种也从开始的只用来收割牧草的唯一品种发展到现在有几十个品种,其中包括旋刀式、往复式、滚刀式、甩刀式、甩绳式。
国外发达国家的家用割草机已向着轻便、噪音小的坐垫式发展。
作为一种工程机械,坐骑式割草机的特殊功能决定了它的特殊构造(功能决定形式)。
同时,特殊的使用环境(草坪)、性能指标、人机关系匹配、安全性要求等也使坐骑式割草机的设计具有与一般车辆不同的设计要求[14]。
2、国内发展状况我国目前生产的割草机以刀具类型可分为滚刀式和旋刀式大类。
滚刀式割草机由带有刀片的滚筒和和不动的床刀组成。
它较旋刀式割草机有更好的修剪质量,是高质量草坪最常用的割草机型。
适用于草高3-80毫米的草坪,其问题主要是价格贵,维修保养要求严格。
而旋刀式割草机是由横向悬挂在直立轴上的刀片高速旋转打切草的上部叶片,它适合于在25-80毫米范围内的剪草。
由于其价格低廉,保养、维修方便、使用灵活,只要将刀片磨快,剪草效果还是可以的。
因此,一般要求的草坪都选用它,成为目前国内外最流行的割草机。
在各种割草机中DZG-1000 型圆盘式电动割草机是其中比较有代表性的手推式割草机,适用于堤坝的割草机中,履带式割草机是一种大家都认为最好的割草机,不但减小了接地压力、保护了植被,而且解决了斜坡割草难度大的问题[7][8]。
除草机器人机械机构与控制系统设计

除草机器人机械机构与控制系统设计发布时间:2022-11-28T03:41:19.954Z 来源:《中国科技信息》2022年15期8月作者:贾鹏王文阳孙伟豪[导读] 针对我国现状设计了一种适用于果园矮砧密植栽培模式的除草机器人,提出了具有割草和断根除草两种功能的机器人方案。
贾鹏王文阳孙伟豪(滨州学院电气工程学院,山东省,256600)摘要:针对我国现状设计了一种适用于果园矮砧密植栽培模式的除草机器人,提出了具有割草和断根除草两种功能的机器人方案。
该机器人系统由机器人本体、割茬高度调节机构、转向机构、割刀角度调节机构和除草机构组成。
采用碟式结构的除草刀盘和三种不同刃线形状的除草刀片,采用Arduino开发平台,通过控制系统硬件和软件程序设计,开发了除草机器人控制系统的核心Arduino主控板、电机驱动模块、超声波避障模块、无线电通信模块,使机器人障碍物检测、报警,远程操控行走、转向等功能有了实现基础。
关键词:结构设计;碟式除草刀;控制系统基金项目:山东省大学生创新创业训练计划项目(202210449014)0 引言果园种植业已经成为各地经济发展的支柱产业及促进农村发展和提高农民收入的重要途径[1],果园杂草过多、过大会造成果树营养物质与水分的流失,影响了果树生长和果品质量。
因此,在果园管理中,使用除草机械代替人工割草、化学除草和覆地膜等除草方式,从而提升工作效率、减少环境和土壤污染,实现果园智能机械化管理,已经成为各地果农在果园管理中的迫切需求和现代化果园发展的必然趋势[2]。
目前,国内大部分除草机器人只适用于在庭院等相对平坦的区域作业,且大多数需要人工驾驶或随行,自动化水平较低[3-4];国外现有的除草机器人多用于田间作业,除草方式多为喷药,会造成环境污染,部分借鉴田间除草机器人研制出的果园除草机器人保留了大结构、大功率的形式,价格高昂,且不适宜矮砧密植果园的作业环境[5-7]。
现有除草机器人功能相对单一,不能同时满足生草果园割草留茬、割茬高度调节和清耕果园断根除草的作业要求。
水田株间除草机械除草机理研究与关键部件设计
水田株间除草机械除草机理研究与关键部件设计陶桂香;王金武;周文琪;牛春亮;赵佳乐【摘要】针对现有水田株间除草机伤苗率高等问题,进行机理分析和改进设计,采用左、右2组弹齿盘对称安装,通过软轴带动除草弹齿盘旋转,完成除草功能.通过对除草关键部件弹齿盘的运动学和水田植物(水稻稻苗和稗草)的强度分析,建立了弹齿盘的运动学模型以及水田植物的受力模型、应力模型.通过水田植物的应力模型分析,建立了水田植物的强度条件,并根据水田植物(水稻稻苗和稗草)的物理特性、弹齿盘基本参数,获得了除草盘转动角速度、弹齿数量的取值范围,并通过室内土槽试验确定了弹齿盘转动角速度为25.1 rad/s、弹齿数量为5.通过田间性能检测,结果表明,除草率为80%、伤苗率为4.5%,均达到了农艺技术指标的要求.【期刊名称】《农业机械学报》【年(卷),期】2015(046)011【总页数】7页(P57-63)【关键词】水田;除草弹齿盘;株间;机理;设计【作者】陶桂香;王金武;周文琪;牛春亮;赵佳乐【作者单位】东北农业大学工程学院,哈尔滨150030;黑龙江八一农垦大学工程学院,大庆163319;东北农业大学工程学院,哈尔滨150030;东北农业大学工程学院,哈尔滨150030;东北农业大学工程学院,哈尔滨150030;东北农业大学工程学院,哈尔滨150030【正文语种】中文【中图分类】S224.1+41有机水稻在生产中完全不使用农药、除草剂等[1-4],因此水田除草是有机水稻生产面临的一个新问题,水田除草机械的研制是解决有机水稻除草的关键。
水田除草机械主要完成2方面的功能,即行间除草和株间除草。
在行间机械除草方面,出现了各种型式的保护性耕作农机具,如旋转锄、齿形除草耙、各种形状的除草铲和篮状除草装置等;在株间除草机具方面,提出了指形除草机、扭杆除草机和刷状除草机等机具[5-9]。
我国自20世纪60年代开始研究株间除草机械,目前株间除草主要工作部件型式有旋转锄式、水平圆盘式、垂直圆盘式、锥形圆盘式、轻耙式、链齿式等[10-13]。
农业机械学试题00(1)综述
1第一章.耕地机械-练习题一、名词解释1.犁体曲面:由犁铧和犁壁共同构成的犁体的工作曲面,起切上、翻土和碎土作用。
2.犁体三支点:由铧尖、铧翼、梨踵三点构成了犁体的支持面。
3.入土行程:犁在地头入土时,从第一铧开始入土,到最后一铧入土到规定耕深所前进的距离。
4.垂直间隙:铧尖和犁踵之连线与水平台面沟底之间构成的间隙,此间隙使犁容易入土,并保持耕深稳定。
5.水平间隙:铧尖和犁踵之连线与铅垂面之间构成的间隙,此间隙保持犁的耕宽稳定。
6.圆盘倾角:圆盘平面与铅垂面之间的夹角。
二、填空题1.犁体是由(犁铧、犁壁、犁侧板、犁托、犁柱)组成。
2.三角形犁铧有两刃口,一个是(铧刃),一个是(胫刃)。
3. 根据设计方法和工作性能的不同,犁体曲面可分为(翻垡型、窜垡型、通用型)等型式。
4.牵引铧式犁的起落及调节机构包括(地轮机构、沟轮机构、尾轮机构)。
5.旋耕机的工作部件由(拖拉机动力输出轴)驱动,用高速回转的(刀片)铣切土壤。
6.旋耕机的传动方式有(中间传动、侧边齿轮传动、侧边链轮传动)。
7.旋耕机的碎土性能由(机器前进速度、刀轴转速)确定。
三、判断题1.梯形铧是铧式犁使用较多的一种犁铧(×)。
2.采用栅条式犁壁主要是为了节省钢材(×)。
3.活动犁踵装在多铧犁最后一铧的犁侧板上(√)。
4.沟轮机构由地沟轮联系机构及水平调节机构组成(√)。
5.牵引器上的安全装置用来保护犁体在遇到过大阻力时不被损坏(√)。
6.旋耕机的碎土作用主要靠挡土罩和平土拖板来完成(×)。
7.弯刀切口切削土壤时,先由正切刃切削,再由侧切刃切削(√)。
8.圆盘犁耕后沟底不平,其不平度不应超过耕深的1/2(√)。
9.双向犁的优点是:耕后地表平整,无沟垄(√)。
四、选择题1.使用小前犁可提高主犁体的(B)。
A.碎土质量 B。
覆盖质量 C。
翻土质量2.使用铧式犁开荒时应采用(C)犁体。
A.窜垡型 B。
通用型 C。
翻垡型3.栅条式犁壁适用于耕(A)。
割草机简介及使用说明
割草机简介及使用说明割草机简介及使用说明历史:19世纪以前,人们手握长柄大镰刀来割草。
这是一种费力活,而且需要把草弄短的许多技能。
一个名叫托马斯·普拉克内特的英国工程师是第一个想出制造割草机的人。
他在1805年获得了第一台割草机的发明专利。
那是一台装有环形刀身的笨重机器,而且运转不很理想。
其他发明家看到普拉克内特的机器后,认为他们能够干得更好。
最成功的是埃温·巴丁。
他是一家纺织厂的工程师,从工厂的某一机械上获得了关于割草机机械结构的想法。
他在1830年制造的割草机非常类似于今天使用的那些机器。
地形高低起伏、表面障碍重重的大面积庭院向发动机的性能提出了巨大挑战。
Vanguard发动机适用于草坪拖拉机,能够担负起耙扫、搬运、牵引、犁地、耕作及锄草等任务。
割草机是能切割牧草或其他可制成干草的作物,并将其铺放在地面上的畜牧机械。
有往复式割草机和旋转式割草机两类。
往复式割草机用于生产,起初由畜力牵引,由地轮驱动割刀。
20世纪后发展由拖拉机牵引的割草机,30年代出现拖拉机悬挂往复式割草机。
依靠切割器上动刀和定刀的相对剪切运动切割牧草,其特点是割茬整齐,所需功率较小,但对牧草的适应性差,易堵塞,适用于平坦天然草场和人工草场作业。
70年代中期开始生产并使用旋转式割草机。
依靠高速旋转刀盘上的刀片冲击切割牧草。
其特点是工作平稳,对牧草的适应性强,适用于高产草场;但切割不够整齐,重割较多,所需功率较大。
割灌机的使用注意事项割灌机是二冲程动力,使用中应从动力、使用和刀具三个方面注意,即可保证机器的正常使用:一、发动机:1、合格的汽油和机油,保证其混合比(25:1);2、定期(25小时)检查更换空滤器检查火花塞;3、每工作一箱油后,应休息10分钟,每次工作后清理机器的散垫片,保证散热;4、贮存时,必须清理机体,放掉混合燃料,把汽化器内的燃料烧净;拆下火花塞,向气缸内加入1-2ml二冲程机油,拉动启动器2-3次,装上火花塞。
国内外田间机械除草技术研究现状

区 目前 使 用 最 为普 遍 的 措 施 。
l %,每 年 损 失 粮 食 就 有 上 百 亿 公 斤 。 0
传 统 的 杂 草 控 制 方 法 就是 靠 人 工 除 草 或 者 采用 化学 药 剂 来 灭 草 。这 些 方 法 的 危 害性 如 下 :
— —
1 国 内外研 究 现 状
要 : 田草害 一直 是 阻碍农 业生 产快 速 、持 续发 展 的一个 重要 因素 。虽 然我 国农 田杂草综 合 治理 已经 取得 了 农
长足 进 步 。但 杂草危 害 、演替 、抗 药性 、除草 剂药 害等 问题仍 相 当严重 。为此 。从 除 草作 业 的缺 陷出发 。分析 了 当今 国 内外 田问 除草 技术 的研 究现 状 以及化 学除 草技 术与机 、电 、光 等技 术 的结合情 况 ;通 过 与美 国 、德 国等 西
11 国 外 研 究 现 状 .
劳 动 强 度 大 、耗 时 费 力 、作 业 效 率低 ,把
资 料 介 绍 较 多 的 国外 除 草 技术 有 化 学 除 草 方 法 和非 化 学 除草 方 法 。有 些 专 家认 为 ,化 学 除 草 虽 可 控 制 草 害 ,但 是 会 带 来 诸 如 生 物 灭 绝 、杂 草 群 落 变 迁 、杂 草 抗 药 性 增 强 且 抗 药谱 扩 大 、环 境 污 染 及 药 剂 残 留等 问题 。 以 ,目前 对 化 学 除 草 持 谨 慎 态 度 , 所 并开始提倡机械除草 。 作 为 保 护 性 耕 作 的关 键 技 术 ,国 外 从 2 世 纪 0
劳 动 者 束 缚 在 土 地 上 ,使 他们 从 事其 它 生 产 活 动 的
收 稿 日 期 :2 0 — O 3 0 5 1- 1
国内外苗间除草装置研究现状与展望
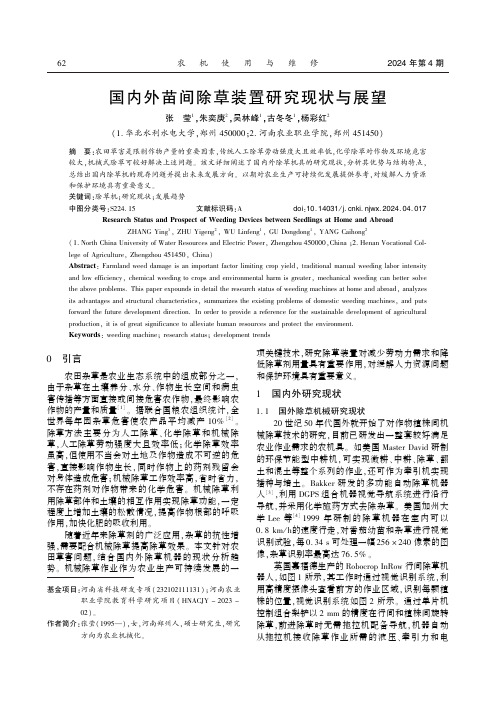
国内外苗间除草装置研究现状与展望张㊀莹1,朱奕庚2,吴林峰1,古冬冬1,杨彩红2(1.华北水利水电大学,郑州450000;2.河南农业职业学院,郑州451450)摘㊀要:农田草害是限制作物产量的重要因素,传统人工除草劳动强度大且效率低,化学除草对作物及环境危害较大,机械式除草可较好解决上述问题㊂该文详细阐述了国内外除草机具的研究现状,分析其优势与结构特点,总结出国内除草机的现存问题并提出未来发展方向㊂以期对农业生产可持续化发展提供参考,对缓解人力资源和保护环境具有重要意义㊂关键词:除草机;研究现状;发展趋势中图分类号:S224.15㊀㊀㊀㊀㊀㊀㊀㊀文献标识码:Adoi :10.14031/ki.njwx.2024.04.017Research Status and Prospect of Weeding Devices between Seedlings at Home and AbroadZHANG Ying 1,ZHU Yigeng 2,WU Linfeng 1,GU Dongdong 1,YANG Caihong 2(1.North China University of Water Resources and Electric Power,Zhengzhou 450000,China ;2.Henan Vocational Col-lege of Agriculture,Zhengzhou 451450,China)Abstract :Farmland weed damage is an important factor limiting crop yield,traditional manual weeding labor intensity and low efficiency,chemical weeding to crops and environmental harm is greater,mechanical weeding can better solve the above problems.This paper expounds in detail the research status of weeding machines at home and abroad,analyzes its advantages and structural characteristics,summarizes the existing problems of domestic weeding machines,and puts forward the future development direction.In order to provide a reference for the sustainable development of agricultural production,it is of great significance to alleviate human resources and protect the environment.Keywords :weeding machine;research status;development trends基金项目:河南省科技研发专项(232102111131);河南农业职业学院教育科学研究项目(HNACJY -2023-02)㊂作者简介:张莹(1995 ),女,河南郑州人,硕士研究生,研究方向为农业机械化㊂0㊀引言农田杂草是农业生态系统中的组成部分之一,由于杂草在土壤养分㊁水分㊁作物生长空间和病虫害传播等方面直接或间接危害农作物,最终影响农作物的产量和质量[1]㊂据联合国粮农组织统计,全世界每年因杂草危害使农产品平均减产10%[2]㊂除草方法主要分为人工除草㊁化学除草和机械除草,人工除草劳动强度大且效率低;化学除草效率虽高,但使用不当会对土地及作物造成不可逆的危害,直接影响作物生长,同时作物上的药剂残留会对身体造成危害;机械除草工作效率高,省时省力,不存在药剂对作物带来的化学危害㊂机械除草利用除草部件和土壤的相互作用实现除草功能,一定程度上增加土壤的松散情况,提高作物根部的呼吸作用,加快化肥的吸收利用㊂随着近年来除草剂的广泛应用,杂草的抗性增强,需要配合机械除草提高除草效果㊂本文针对农田草害问题,结合国内外除草机器的现状分析趋势㊂机械除草作业作为农业生产可持续发展的一项关键技术,研究除草装置对减少劳动力需求和降低除草剂用量具有重要作用,对缓解人力资源问题和保护环境具有重要意义㊂1㊀国内外研究现状1.1㊀国外除草机械研究现状20世纪50年代国外就开始了对作物植株间机械除草技术的研究,目前已研发出一整套较好满足农业作业需求的农机具㊂如美国Master David 研制的环保节能型中耕机,可实现微耕㊁中耕㊁除草㊁翻土和混土等整个系列的作业,还可作为牵引机实现播种与培土㊂Bakker 研发的多功能自动除草机器人[3],利用DGPS 组合机器视觉导航系统进行沿行导航,并采用化学施药方式去除杂草㊂美国加州大学Lee 等[4]1999年研制的除草机器在室内可以0.8km /h 的速度行走,对番茄幼苗和杂草进行视觉识别试验,每0.34s 可处理一幅256ˑ240像素的图像,杂草识别率最高达76.5%㊂英国嘉福德生产的Robocrop InRow 行间除草机器人,如图1所示,其工作时通过视觉识别系统,利用高精度摄像头查看前方的作业区域,识别每颗植株的位置,视觉识别系统如图2所示㊂通过单片机控制组合梨铲以2mm 的精度在行间和植株间旋转除草,前进除草时无需拖拉机配备导航,机器自动从拖拉机接收除草作业所需的液压㊁牵引力和电能,操作简单,只需在驾驶室中检查监视器是否识别植株即可,工作稳定且效率高,前进速度可达3~4km /h,除草率达98.5%[5]㊂图1㊀嘉福德Robocrop InRow行间除草机器人图2㊀嘉福德Robocrop InRow 视觉识别系统澳大利亚昆士兰科技大学Bawden 等[6]研制一款名为AgBotII 的模块化除草机器人,如图3所示㊂该机器的视觉识别系统基于颜色识别植株与杂草,可根据需求选择化学除草或机械除草㊂通过试验表明,该机器在处理区的杂草覆盖率保持在1.5%,对照区的杂草覆盖率37%,AgBotII 机器人还可对阔叶植物与禾本科植物进行分类,准确率达96%,对单个杂草种类的分类准确率达92.3%㊂瑞士ecoRobotix 公司生产的田间除草机器人,如图4所示㊂该机以太阳能为动力,可互换电池,昼夜工作,一天24h 可以作业96hm 2的田地,约合4hm 2/h,最高时速7km /h,重量仅有130kg,远轻于传统的除草机器,一定程度上减小了机器对土壤的破坏,保证了作物的生长环境[7]㊂该机器通过视觉识别技术可准确识别出杂草,通过机械手臂精准地对杂草喷洒除草剂,相比传统的除草剂喷洒方式减少了20倍的除草剂用量,每年可为农场主节约30%的费用[8]㊂该机器具有云服务功能,ARA 每秒可拍摄10张图像发送到服务器进行分析,使用者通过个人账户便可了解整个田地存在的杂草情况㊂奥斯纳布吕克大学与亚马逊公司Werke联合图3㊀AgBotII除草机器人图4㊀瑞士ecoRobotix 公司除草机器人开发研制的机械式株间摆线锄式除草装置[9],如图5所示㊂该装置的苗间除草机构由4根分布均匀的除草爪构成,除草作业时,由GPS 导航系统提前规划前进路线,在行驶过程中通过机器视觉确定植株与杂草位置[10],伺服控制系统控制除草爪以摆线运动轨迹躲避作物,其工作原理如图6所示㊂图5㊀摆线锄式除草机图6㊀摆线锄除草工作原理国外除草机更倾向于采用视觉控制系统配合除草剂的方式除草,由于种植面积㊁土地分布情况的差异,除草机械多为牵引式,工作面积大,价格高昂,与我国农业作业行情适用性不好㊂1.2㊀国内除草机械研究现状国内对株间除草装置的研究起步较晚,主要集中在科研院所,从20世纪60年代开始,我国对株间除草机器的研究取得了重大突破,开发研制出了弹齿式㊁旋锄式㊁圆盘式等多种类型的除草执行机构,同时我国研制出了驱动与非驱动等多种株间除草机[11-12]㊂东北农业大学韩豹等[13]针对旱田作物苗间的除草松土农艺要求,研制出3ZCF-7700型多功能中耕除草机,如图7所示㊂该中耕除草机采用弹齿式方行四连杆机构与多功能单体架相连接,除草部件为水平圆盘式,圆盘上安装了数个弹性梳齿,在除草作业时,圆盘前进的同时并绕轴自转,弹性梳齿轨道重叠成余摆线网格,在弹性梳齿转动过程中将扎根较浅的杂草粉碎并抛在地面,同时可实现对20~40mm的表土进行疏松㊂1.扶苗装置;2.仿形机构;3.横梁;4.挂接装置;5.传动系统;6.传动轴;7.主梁;8.张紧装置;9.除草部件;10.方形四连杆装置;11.锥齿轮箱;12.多功能单体架;13.除草铲图7㊀32CF-7700型多功能中耕除草机吉林大学顾炳龙等[14]研发出一种集成结构减阻㊁智能控制的除草执行机构,如图8所示㊂在田间作业时通过行程开关检测植株位置,根据行程开关识别植株的时间差来确定除草装置的运动路线,通过以蝼蛄口器为仿生原型的刀具进行除草作业,除草时还可根据植株位置进行自动避苗㊂该机具装配入土深度稳定性控制系统,可实现对刀具入土深度的良好控制,保证了作业稳定性㊂试验结果表示,株距22.57cm㊁刀具入土深度4.15cm㊁机具前进速度1.58km/h的情况下,除草率82.87%㊁伤苗率4.83%㊂图8㊀除草装置整体图东北农业大学周福君等[15]设计的凸轮摇杆式摆动型株间除草装置,如图9所示㊂工作中凸轮摇杆机构配合电动机转动,实现除草刀张开㊁闭合的往复摆动㊂当除草装置接近植株苗时,霍尔接近开关作为导航模块发出脉冲信号,下部2个凸轮推动摆杆旋转,使除草刀向后摆动实现避苗㊂该机具还可根据植株大小更换凸轮,改变除草作业区㊂试验结果表示,前进速度0.6m/s㊁除草刀转速130r/min 的情况下,除草率89.8%㊁伤苗率2.1%㊂图9㊀凸轮摇杆式摆动型株间除草装置2㊀现存问题近年来我国除草机发展迅速,尽管当前除草机类型已经越来越多元化,但工作部件较单一,多为单翼铲㊁双翼铲或圆盘式的除草机,除草时除草率低㊁伤苗率高等关键问题没有较好的解决方法[16-17]㊂在株间智能识别除草方面,对田间杂草精确识别定位,仍是制约除草精确技术发展的主要问题[18-20]㊂目前,国内除草识别技术已经可以辨别出作物和杂草,但辨认准确度㊁作业效率㊁稳定性需提高,与国外的株间智能识别除草技术存在一定差距㊂3㊀发展趋势统计分析表明,中国及多个国家均出现不同程度上人口老龄化的问题,同时食品安全也越来越受到人们的关注,从食品原料出发,减少作物农药残留是保证食品安全的重要环节,研究除草机器意义重大,可解决人力不足㊁化学除草造成污染等问题[21]㊂近年来,国家开始加大对农业机械研发的扶持力度,并将中耕机列入农机补贴项目,除草机器的发展也随之迎来了契机㊂1)我国人多地少,小型除草机更适合我国土地情况,现阶段的除草装置整体效果良好,但仍存在伤苗率高㊁除草率低的问题,需要结合国外除草装置的技术优势,提高国内除草装置的除草质量㊂2)智能机械除草具有识别分析功能,针对复杂地形及不同作物实现除草机的自动导航㊁避苗,并根据杂草的分布情况㊁密度等信息做出相应分析,提供适合土地状况的除草方案,提高除草机作业智能化操作是重要的发展方向㊂3)电子或电力灭草效果明显,对作物㊁土地危害较小,若能建立相应的理论依据,深入电场对植物生长影响的研究,并对植物生长不同阶段的杂草物理参数进行测试分析,为研制电子除草机做铺垫,对我国农机具发展具有重要意义㊂4㊀结语国外发达国家对除草机的研发较早,在减少劳动强度及环境污染㊁保证作物生长环境等方面起到了重要作用㊂我国对除草机械研发起步较晚,作业效果与国外存在一定差距㊂本文通过对比国内外除草机器的发展现状得出,我国应加大对农用机具的研发力度,特别是机器视觉系统㊁控制应用技术㊁导航识别技术的研究,加快除草机向着智能化㊁精准化㊁自动化的方向发展,实现现代化除草作业㊂参考文献:[1]㊀傅雷扬,李绍稳,张乐,等.田间除草机器人研究进展综述[J].机器人,2021,43(6):751-768. [2]㊀邢钦淞,丁素明,薛新宇,等.智能田间除草机器人发展现状研究[J].中国农机化学报,2022,43(8):173-181.[3]㊀Bakker T.An autonomous robot for weed control:De-sign,navigation and control[D].Wageningen,Nether-lands:Wageningen University,2009.[4]㊀Lee W S,Slaughter D C,Giles D K.Robotic weed con-trol system for tomatoes[J].Precision Agriculture,1999,1(1):95-113.[5]㊀兰天,李端玲,张忠海,等.智能农业除草机器人研究现状与趋势分析[J].计算机测量与控制,2021,29(5):1-7.[6]㊀Bawden O,Kulk J,Russell R,et al.Robot for weedspecies plant-speci?c management[J].Journal ofField Robotics,2017,34(6):1179-1199.[7]㊀何全令,杨静文,梁晋欣,等.面向嵌入式除草机器人的玉米田间杂草识别方法[J].计算机工程与应用,2024,60(2):304-313.[8]㊀赖汉荣,张亚伟,张宾,等.玉米除草机器人视觉导航系统设计与试验[J].农业工程学报,2023,39(1):18-27.[9]㊀胡炼,刘海龙,何杰,等.智能除草机器人研究现状与展望[J].华南农业大学学报,2023,44(1):34-42.[10]N?RREMARK M,GRIEPENTROG H W,NIELSEN J,et al.The development and assessment of the accuracy ofan autonomous GPS-based system for intra-row me-chanical weed control in row crops[J].Biosystems Engi-neering,2008,101(4):396-410.[11]蒋郁.基于机器视觉的水稻株间机械除草关键技术研究[D].广州:华南农业大学,2019.[12]乔清旭,杨晶,袁洪印,等.浅谈智能化除草机的研究现状及其发展趋势[J].农业开发与装备,2023(1):39-41.[13]韩豹.东北垄作株间机械除草关键部件研究与整机设计[D].长春:吉林大学,2011.[14]顾炳龙.玉米株间避苗除草技术及其配套装置研究[D].长春:吉林大学,2023.[15]周福君,王文明,李小利,等.凸轮摇杆式摆动型玉米株间除草装置设计与试验[J].农业机械学报,2018,49(1):77-85.[16]段小贺,韩建国,巴金磊,等.玉米田化学除草现状及发展趋势[J].园艺与种苗,2019,39(8):54-56.[17]张文莉,陈树人,褚德宏.除草机器人研究现状与趋势[J].农业装备技术,2015,41(2):6-10. [18]KUNZ C,WEBER J F,PETEINATOS G G,et al.Cam-era steered mechanical weed control in sugar beet,maizeand soybean[J].Precision Agriculture,2018,19(4):708-720.[19]刘浩.面向玉米大田作业的农业机器人导航与杂草识别技术[D].淄博:山东理工大学,2021.[20]蒋郁.基于机器视觉的水稻株间机械除草关键技术研究[D].广州:华南农业大学,2019.[21]郭冉,王俊.世界人口发展趋势和人口转变:理论与现实[J].人口与社会,2019,35(3):52-63.(02)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
田间除草机械综述摘要:水稻田间机械除草技术在减少除草剂防治和有机稻草害控制的研究和应用中具有重要作用。
该文收集和整理国内外水稻田间机械除草装备与技术研究现状,概括了现在市场上应运广泛便捷的除草机械,分析了除草机械主要的技术核心。
结合我国具体情况,应采用多学科多技术联合、农机农艺相互配合及多功能于一体融合的研究方法研制智能化除草系统,以期提高除草精度和我国农业机械化水平。
关键字:除草;机械式;装备;现状;趋势Summarization of Field Weeding MachineryAbstract:The mechanical weed control in paddy field plays an important role in reducing herbicide control and organic rice straw weed control research and application. This paper collects and arranges the domestic and foreign research status of mechanical weeding equipment and technology in rice field, summarizes the weeding machinery which is convenient and widely used in the market nowadays, and analyzes the main technical core of weeding machinery. Combined with China's specific circumstances, should be multi-disciplinary multi-technology joint, agricultural and agricultural cooperation with the integration of multi-functional research methods in the development of intelligent weeding system in order to improve weeding accuracy and level of agricultural mechanization.Key words: Weeding; Mechanical; Equipment; Status; Trends0.引言稻田杂草与水稻争夺生长空间、肥料养分、光照、水、热等资源,影响水稻的生长发育,是造成水稻产量下降和品质降低的主要原因之一,每年由草害引起的水稻产量损失率在15%以上。
因此,在水稻的生产过程中,科学有效地控制草害是确保水稻健康生长,实现高产、优质的必不可少的关键环节之一。
化学药剂除草是目前应用最广泛的一种除草方式,它具有快速、高效、经济等优点,85%~100%的作物生产中使用了除草剂。
然而20世纪80年代以来,世界范围内除草剂的大面积使用,带来了诸多负面问题,如杂草的抗药性、作物药害、生态环境污染,大量施用化肥与农药导致生态环境的恶性连锁反应,各种灾害频发,是一种不可持续的耕作方式。
随着现代农业的发展,以及人们环境保护意识的加强和对食品质量安全问题的重视,除草剂减量防除技术逐渐发展起来,机械除草、农业防除和生物防治等非化学除草技术得到了更多的研究和应用。
在水稻田间非化学除草的防治技术中,机械除草技术发展迅速,并有相应的水稻田间除草装备在农业生产中应用。
机械除草作业是旱作农业可持续发展的一项关键性生产技术,是利用各种耕、翻、耙、中耕松土等措施在播种前、出苗前及各生育期等不同时期进行除草,能杀除已出土的杂草或将草籽深埋,或将地下茎翻出地面使之干死或冻死。
这是我国北方旱区目前使用最为普遍的措施。
1.国外除草机械发展现状作为保护性耕作的关键技术,国外从20世50年代就开始了对机械除草技术的研究。
经过多年的研究改进,目前已经形成了一整套成熟的保护性耕作农机具。
1.1欧美欧美(美国、意大利等)及澳大利亚等国家水稻种植方式以直播为主。
直播水稻田稻种与草种同时萌发,根系深度无明显差异,杂草个体生长空间大,草量是移栽水稻田自然发生量的数倍;此外,撒播稻田内秧苗无序生长,植保机具无法下田。
因此,直播水稻田杂草防治以化学防治为主,即施用高效除草剂灭草,少见机械除草方式。
近年来,随着传感器和人工智能技术的发展,杂草视觉识别技术发展迅速,并应用于除草机器人的研究。
Vale.S等人研制的苗间除草装置利用红外线传感器检测作物,当检测到作物时,信号传输至计算机,计算机通过控制命令驱动执行机构将锄刃离开作物以避免对其损伤,之后又回到原位进行除草作业。
据报道,此装置在高达5cm、8个叶片、株距在17~18cm的生菜田间进行试验,性能良好。
同样利用红外线传感器检测作物,荷兰瓦格宁根大学研究的苗间除草系统中,两条或多条除草刀装在垂直旋转的圆盘上,当检测目标为杂草时,圆盘高速旋转,除草刀展开伸出至作物苗间将杂草切断;当目标位作物时,转速降低收回除草刀,避免除草刀与作物接触而损伤作物。
Dedousis等人设计了一种控制苗间杂草的旋转阀掰锄,如图1所示。
图1 除草原理说明图其旋转中心沿与作物行有一定距离且与作物行平行的直线移动,锄上切除部分使锄通过作物时避免与作物接触,而锄体在通过苗间区域时破坏土壤,从而达到保护作物除去杂草的目的。
田间试验表明,选用直径175mm、切除部分156°的圆盘和约15mm的入土深度能取得较好效果。
另外,在机器前行速度0.5m/s的情况下,该机构除草率超过87%。
美国的JD970滚刀式除草耙,其工作末端执行器随着机器前进,带动刀轴转动,滚切刀外缘的刀刃切断草根,实现除草目的,除草效率高,消耗动力小,机具的作业末端执行器为滚动部件,因此不会发生秸秆堵塞;美国的JD886型行间管理除草机具有可调整的护苗板,进行喷药除草治虫或机械除草时可以有效地保护作物,离地间隙高,适宜在秸秆覆盖的田间进行行间作业。
西班牙的Pérez-Ruiz、美国的Slaughter等人研究了把GPS定位系统用于株间除草工作,其除草末端执行器如图2所示。
对比试验结果表明:此系统在针对设定的靠近植株的区域(以植株为中心,半径10mm的范围内)的定位精度很高,他们后来又研究了一个基于一种精确的测距传感器的协作机器人(co-robot)控制系统。
这个系统用于控制类似图2所示的1对除草刀的开闭,在人工辅助监控下,以达到避开植株而除去株间杂草的目的。
其优点是简单廉价,易于操作。
图2行作物株间除草刀C.Cordill和T.E.Grift研制了一种利用激光控制的用于玉米苗间除草的装置,如图3所示。
该装置由4组激光发射器和相应数量的、与之有一定距离的接收器组成。
4组激光发射器与接收器均平行于地面且处于垂直地面的平面上,当玉米茎和杂草位于发射器和接收器之间时会产生二进制的脉冲,累积脉冲达到4组时即可判断此组脉冲对应的是玉米茎,其余为杂草。
该装置在不同条件下伤苗率不同。
田间试验分析表明,在3行玉米苗间无草、3行玉米苗间充满阔叶杂草、3行玉米苗间充满禾本科杂草的情况下,伤苗率分别为8.8% 、23.7% 、23.7%,更深入的研究尚在进行。
图3自动避障玉米株间除草机德国专门研制出一种除匍根冰草机械,用钢爪抓耙20cm深地表,把匍根冰草连根拔起堆放喂猪或腐化成肥料。
德国波恩大学开发了一种苗间除草系统,如图4所示。
该系统由执行机构、速度检测器、数据采集单元和作物识别系统等组成。
控制软件根据株距、当前锄臂位置对数据采集单元所收集的作物识别、机器前进速度、电机旋转速度等相关数据进行实时计算,进而调整执行机构的旋转速度。
据报道,该系统可用于缺苗、株距不一致等情况,但至2007年仅在虚拟环境中实现。
图4旋耕锄模型丹麦的Melander 等人从20世纪90年代就开始对株间机械除草技术进行研究,对当时已研发出的可同时进行行间和株间除草的刷式除草机(如图5)进行优化分析。
在洋葱地里进行试验,研究洋葱生长在不同时期,刷子的转速、拖拉机的前进速度、刷子的工作深度和刷子间距对除去杂草和洋葱产量的影响。
结果显示: 刷子的转速和拖拉机的前进速度对洋葱的产量和杂草控制影响较小,刷子的工作深度和刷子间距是很重要的参数。
瑞典的Fogelberg 等人进一步研究了影响刷式除草机在工作后形成的土壤高度的主要因素。
除草刷有两个不同的转向,由此可得到把土壤搬运到行间或株间(即拔出或覆盖株间的杂草)两个效果。
试验结果表明:影响形成土壤高度的因素有除草刷的转向、除草刷工作深度、土壤湿度、作物和杂草的生长状态。
其中,除草刷工作深度越深、土壤湿度越大,形成土壤的高度越高,某种意义上,即除草效果越好。
图5刷式除草剂一种基于GPS的苗间除草实时控制系统由M.PérezRuiz等人研制成功,它由苗间除草刀、GPS及实时控制系统(RTK)组成。
当监测系统RTK-GPS确定当前的植物为作物时,苗间除草刀自动张开以避免损伤作物,随后关闭进行苗间杂草控制作业。
对682颗番茄田间试验表明,其前进的速度为0.8、1.6km/h情况下,没有伤苗出现。
据报道,此技术可行,将来的研究工作在于评价此技术是否具有实在的经济价值。
欧美地区发达国家研制的苗间除草装置所用技术先进,而由于经济发展、土地条件等因素不同,我国仍需结合本国国情、因地制宜地研究本国当地所需的机械除草装置与技术。
1.2 日本亚洲国家的水稻种植方式通常以移栽为主,其中日本水稻移栽装备与机械化水平最高。
近年来,有机农业在日本发展迅速,有机稻米颇受消费者的青睐,因此,根据市场的需求以及有机稻栽培的生产要求,一些研究机构和农机生产企业开发了水田除草机。
市场上出售的水田除草机按切割器类型划分有圆盘式、甩刀式和往复式;按与拖拉机挂接方式划分有前置式、侧置式和后置式;按照行走方式主要分为步进式和乘坐式2种,其中乘坐式又可细分为三轮乘坐式和四轮乘坐式,不同机种除草部件的相应结构如表1所示。
表1日本主要水田除草机类型1.2.1步进式水田除草机图6a所示的和同产业MSJ-4型步进式水稻田间除草机,行间除草末端执行器为随动的除草辊,株间除草末端执行器为一对驱动转动的弹齿盘。
该机工作时水深为8~10cm,作业速度为0.2~0.3m/s时,作业效率为为0.4~0.6hm2/h。
此外,美善株式会社研发的步进式水田除草机的株间除草末端执行器也具有一定特色,株间除草工作由一对随动转动的伞状除草盘完成,行间除草末端执行器与洋马步进式除草机类似,如图6b所示。