PLC的MODBUS通信实例
欧姆龙PLC分别做modbus tcp客户端和服务器的通讯案例
欧姆龙PLC分别做modbus tcp客户端和服务器的通讯案例NJ并不支持ModbusTCP协议,库文件是在socket的根底上开发出来的功能块。
库文件共有8个功能块,根据不同的功能块实现不同的modbusTCP的功能。
8个功能块分别为客户端使用7个功能块,客户端连接、读线圈、读输入存放器、读保持存放器、写单个线圈、写单个保持存放器、写多存放器;和服务器使用一个功能块。
1、客户端连接取其中一个功能块为例,开展测试。
添加客户端连接功能块,写入对方IP、端口号、连接信号变量;功能块使能后,置位connect。
输出部分,可以看到错误和错误代码。
添加读保持存放器功能块,写入从设备地址、起始地址、字节长度,connect功能块中的输出TCP_socket需要和读写功能块输入的TCP_socket为同一变量;建立好输出变量,send_request置位即可读取。
接收数据为Word,如果需要转为其他数据类型,可以使用数据转换指令。
2、服务器连接添加功能块,在输入中分别填入需要发送的存放器和线圈数据;上位开展连接后,将会显示对方IP和端口。
由于modbus的固定端口为502,因此调试工具或者其他上位需要将连接端口设置为502;否则无法开展通讯。
注:以太网通讯中,部分端口号为固定用途,例如网页打开的默认端口为80,在使用中会自动省略;modbus端口为502.连接成功后,发送Modbus功能码开展通讯。
3、服务器连多个客户端在实际使用中,会遇到连多个客户端的情况,由于功能块是使用socket方式开发,因此,可以使用多个端口连接。
但是,如果对方是标准的modbusTCP,无法更改端口的话,那么将无法开展多个客户端连接。
先将功能块里的内容复制出来,然后再将端口号的改为变量的方式,这样就可以开展多客户端连接。
经测试,通讯没有问题。
台达plc的Modbus通信
双击串口父设备设置属性,设 置值要求与PLC一样
在这里可以增加触摸屏与PLC 之间的通道连接
台达PLC的MODBUS协议通信
组态图上所示的界面,添加两个设备
双击打 开通用 TCP/IP父 设备, 设置红 圈中所 示的属 性值
双击设备0打开如图所 示的界面,设置通道 名称,具
程序设计
6.结论
该系统具备以下特点:
1.该系统结构简单,运行可靠。 2.使用PLC实现自动化控制传送带的运行,使传送 带速度的变化由PLC控制,提高运行效率。 3.整个工作站在加入了机器人以后,减少了人力成 本实现无人化控制,可以快速分拣物件。
本次课题的不足之处:
1.对于该工作站我们只测试了外围设计及传送带部 分,机器人没有能够加入到整个设计中。
2.在变频器与PLC之间的RS-485串口通信中,我们 由于时间问题没有通信正确而改为连接变频器输 入口的方法。
N
否检测到
信号
Y
检测信号给PLC
PLC给信号给变频 器
变频器带动传送 带
传感器2
N
是否检测
到信号
Y
检测信号给PLC
PLC给信号给机器 人
机器人将物料抓 走
开结束
2.系统设计
触摸屏
台达PLC
西门子PLC
变
传
频
感
器
器
变
传
频
感
器
器
控制系统设计
3.实物连接图
4.台达PLC的RS-485串口通信
在MCGS 设备组态 属性窗口 组态如图 所示设备
台达PLC的应用
指导教师:任彦仰 演讲者:阳李国
台达PLC相关毕业设计内容
1200modbus程序实例

1200Modbus程序实例在工业自动化领域中,PLC(可编程逻辑控制器)扮演着至关重要的角色。
而在PLC的编程中,Modbus通信协议更是被广泛应用。
今天,我们将通过一个实例来深入探讨1200Modbus程序的实现。
1. 了解Modbus通信协议Modbus通信协议是一种用于实现主从设备通信的协议,广泛应用于工业控制领域。
其特点是简单、可靠,并且易于实现。
Modbus协议包括RTU、ASCII和TCP/IP三种不同的传输方式,其中RTU是最常见的一种。
2. 了解1200Modbus程序的需求在实际工程中,我们可能会遇到这样的需求:使用西门子S7-1200 PLC作为Modbus的主站设备,与其他Modbus从站设备进行通信。
在这种情况下,我们需要编写1200Modbus程序来实现数据的读写和通信控制。
3. 编写1200Modbus程序的步骤(1)我们需要在TIA Portal软件中创建一个新的项目,并配置1200 PLC作为主站设备。
(2)根据从站设备的位置区域和通信参数,配置Modbus通信协议的相关参数,包括从站位置区域、数据类型、寄存器位置区域等。
(3)接下来,编写PLC程序,使用1200Modbus指令块来实现对从站设备的读写操作。
在程序中,我们需要注意错误处理和通信超时的情况,以确保通信的稳定性和可靠性。
(4)将编写好的程序下载到PLC中,并进行在线调试和测试。
在测试过程中,我们需要对通信的实时性和数据的准确性进行全面的验证。
4. 1200Modbus程序的应用通过以上步骤,我们成功实现了1200Modbus程序的编写和调试。
这样的程序可以广泛应用于工业自动化领域,例如对温度、压力、流量等参数进行实时监测和控制;对设备的运行状态进行远程监控和操作等。
这种程序还可以作为工业互联网和物联网的基础,为工厂的数字化转型提供强有力的支持。
5. 个人观点和总结1200Modbus程序的实现并不复杂,但需要我们对Modbus通信协议有深入的理解和掌握。
modbus协议通信实例
modbus协议通信实例Modbus协议是一种常用的工业通信协议,它可以实现不同设备之间的数据交换。
下面将介绍一个Modbus协议通信的实例。
在这个实例中,我们需要将一个温度传感器的数据传输到PLC控制器上。
首先,我们需要选择一个支持Modbus协议的温度传感器和PLC 控制器。
在这个实例中,我们选择了一个支持Modbus RTU协议的温度传感器和PLC控制器。
接下来,我们需要配置温度传感器和PLC控制器的Modbus通信参数。
在这个实例中,我们选择了9600波特率、8数据位、无校验位和1停止位。
我们还需要为温度传感器和PLC控制器分配Modbus地址。
在这个实例中,我们将温度传感器的Modbus地址设置为1,将PLC控制器的Modbus地址设置为2。
现在,我们可以开始编写PLC控制器的程序。
在这个实例中,我们使用了一个Modbus RTU通信模块来实现PLC控制器与温度传感器之间的通信。
我们需要在PLC控制器的程序中添加Modbus RTU通信模块,并配置通信参数和Modbus地址。
然后,我们需要编写一个读取温度传感器数据的程序,并将数据存储到PLC控制器的内存中。
在温度传感器和PLC控制器之间建立通信后,我们可以使用Modbus 调试工具来测试通信是否正常。
在这个实例中,我们使用了一个Modbus调试工具来读取温度传感器的数据。
我们需要在Modbus调试工具中设置通信参数和Modbus地址,并发送读取数据的命令。
如果通信正常,我们将能够读取到温度传感器的数据。
最后,我们可以在PLC控制器的HMI界面上显示温度传感器的数据。
在这个实例中,我们使用了一个数码管来显示温度传感器的数据。
我们需要在PLC控制器的程序中添加一个数码管,并将温度传感器的数据显示在数码管上。
总之,Modbus协议是一种常用的工业通信协议,它可以实现不同设备之间的数据交换。
在这个实例中,我们使用了Modbus RTU协议来实现温度传感器和PLC控制器之间的通信,并将温度传感器的数据显示在PLC控制器的HMI界面上。
实例讲解PLC实现modbus通讯

实例讲解PLC实现modbus通讯1. 硬件设置程序中的 Modbus 通讯是在两个 S7-200 CPU 的 0 号通讯口间进行的(最好每个CPU 都有两个通讯口)。
在主站侧也可以用相应库文件'MBUS_CTRL_P1' 和'MBUS_MSG_P1'通过1号通讯口通信。
通讯口1 用 Micro/WIN 与 PG 或 PC 建立连接,两个 CPU 的通讯口 0 通过Profibus 缆进行连接(电缆的针脚连接为3,3,8,8 -> 见图 01)。
另外,需要确定逻辑地M相连。
2. 参数匹配对于MODBUS 通讯,主站侧需要程序库'MBUS_CTRL' 和'MBUS_MSG',从站侧需要程序库 'MBUS_INIT' and 'MBUS_SLAVE'。
在 Micro/WIN 中您需要为主站和从站新建一个项目,程序与参数设置见图.02。
必须要保证主站与从站的“Baud”和“Parity” 的参数设置要一致,并且程序块'MBUS_MSG' 中的'Slave' 地址要与程序块'MBUS_INIT' 中的 'Addr' 所设置的一致 (见图. 02)。
在Micro/WIN“系统块”中设置的通讯口0 的波特率与MODBUS 协议无关 ('Mode' = '1')。
下面的表格列出了程序块各个参数选项及其含义。
主站MBUS_CTRLMBUS_MSG从站MBUS_INITMBUS_SLAVE3. 库的存储地址项目完成后必须要在 Micro/WIN 中定义库的存储地址,当定义完存储区后, 要保证在任何情况下不能再被其它程序所使用(主站侧: 'DataPtr' + 'Count' 从站侧:'HoldStart' + 'MaxHold')。
PLC的Modbus通信.
PLC 与串口的 MODBUS 通信1 需求2 方案MODBUS 协议是一种主从协议, 只允许一个主设备, 设计中以 PLC 作为主站MSP430开发板作为从站。
如图 1示。
图 1 PLC与 MSP430连接图为方便起见,首先以 PC 机作为 MODBUS 从站,在 PC 机上利用串口调试助手来接收和发送数据, PLC 通过 PPI 电缆连接到串口,采用 PROT0通讯口作为MODBUS 通讯口。
3 具体实现:3.1 MODBUS数据帧介绍MODBUS 广泛应用于工业通讯领域,它规定了通信双方的通信格式,只要双方都使用该规定就可以解析出正确的通信内容。
在此, 首先介绍一下 MODBUS 通信的数据帧格式, 以 3号功能码以及 16号功能码为例, 3号功能码是读保持寄存器的值, 16号功能码是写保持寄存器的值。
1、读取保持寄存器当 MODBUS 主站需要读取指定地址处数据时, 首先向从站发送一个读命令帧, 所发送命令帧格式如表 1。
表 1 读命令主站发送命令帧格式数据帧说明如下表:表 2 读命令主站发送命令帧说明例:需要读取 2号站从第 4个寄存器开始的 3个寄存器, MODBUS 主站发送的数据帧为:02 03 00 04 00 03 44 39从站在接收到主站的读命令以后,会发送一个返回命令帧,返回的命令帧格式如表 3。
表 3 读命令从站返回命令帧格式数据帧说明如下表:表 4 读命令从站返回命令帧说明例:对于主站的读命令帧, 2号站如果第 4个寄存器开始的 3个寄存器里面的值分别为:31,32H,33H,34H,35H,36H则应答帧应该是:02 03 06 31 32 33 34 35 36 D1 AC对于发送的命令帧与应答帧之间有如下关系: 1:两个数据帧的设备地址相同。
2:两个数据帧的功能码相同。
3:返回的数据量N=2ⅹ DataNum如果从站在接收到数据以后,认为接收到的主站发送过来的数据是错误的,会返回一个异常帧给主站,告诉主站,从站接收到的数据是错误的。
MODBUS通信Q03UDV CPU与永宏PLC通讯
MODBUS通信Q03UDV与永宏PLC参考资料:1、“01 参考资料”文件夹>> “FBs-PLC使用手册II-高级篇>高级篇第12章CLINK MODBUS”2 、“01 参考资料”文件夹>> “QJ71MB91”利用QJ71MB91智能模块和FXBS-CB5模块,通过RS485接线方式实现Q03UDV与FBS-40MC主从站通讯,实现主从站之间的数据读取与写入。
通讯实例要求如下:永宏PLC读取三菱Q03UDV地址D0—D3的数据并保存在自身地址D0—D3中。
永宏PLC将自身地址D4—D7的数据写入到三菱Q03UDV地址D4—D7中。
使用QJ71MB91智能模块的第二个通讯口通过RS485接线方式,实现主从站通讯。
主站地址设为1,从站地址设为2。
一、硬件配置。
主站配置:永宏PLC FBS-40MC+FBS-CB5从站配置:Q03UDV、QJ71MB91智能模块通讯接线如下图:二、主站设置于编程(FBS-40MC)1.主程序编写(如下图)通讯表格(如下)三从站1、QJ71MB91开关设置:在编程软件智能模块的开关设置中设置QJ71MB91的通讯格式。
具体设置见下图2、QJ71MB91 MODBUS通信参数设置与永宏PLC相关通讯参数均要设置一直,方可通讯相关通讯从站参数设置说明如下:①QJ71MB91可以最多设置32组通讯参数,每组参数可以设置与之通讯的从站地址、通讯读写软元件的类型、长度等。
QJ71MB91将从站读取的信息保存在自身的缓冲存储器中,永宏PLC如果想读取从站的信息,就必须到QJ71MB91缓冲存储器中读取。
读取的方式可以是自动设置,也可以通过程序编写读取。
QJ71MB91通讯示意图如下②我们使用的是QJ71MB91的第二个通讯口,所以要将CH2设为启用。
软元件类型指定我们设置为:默认MODBUS通讯参数。
起始缓冲存储器地址均为通用型MODBUS通讯地址,写入或读取的缓冲存储器地址,具体见下图我们设置的是读取自动刷新地址是D0(0,2)即自动读取D0与D1我们设置的是写入自动刷新地址D4(0,2)即自动写入的地址是D4和D5.我们看到自动读取还有D2、D3,自动写入的地址还有D6、D7为读入或写入对方的通讯设备中,这一部分我们通过程序来完成。
松下PLC(FP-X )Modbus通讯实例

松下PLC(FP-X )Modbus通讯实例
本例以modbus rtu模式进行测试
1
名称型号数量说明
1松下PLC FP-X1PLC主机
2COM3模块松下1松下485通讯模块
3台达温控器DTC1000C1台达温控模块
4阳明温度探头PT-1001温度传感器
2
软件名称说明
1FPWIN GR(Version 2.94)松下PLC梯形图编程软件
2DTCOM_T(Simplified Chinese)台达温控器设置软件
(1.0017)DTCOM_T(Simplified Chinese) 3
通讯协议侦测
通讯协议设定
设定成功后,可以测试一下
测试成功之后,关闭温控器软件。
4、打开松下PLC编程软件FPWIN GR,并编写一下程序
然后打开PLC系统寄存器设置,选择COM1端口设置,然后把参数设置为下图所示
5、当所有软件都准备完成以后,进行硬件的连接。
A、台达温控器和传感器(PT-100)的接法
红线
1
2
3
白线
白线
B、台达温控器485接头和COM3模块接法
温控器+ 接 COM3 S+
温控器- 接 COM3 S-
6、检查线路和程序无误后,上电后,打开PLC编程软件,打开R10和R11
结果如下图
DT100显示的数据就是温度传感器的实时值。
(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。
可复制、编制,期待你的好评与关注)。
与西门子PLC实现Modbus-RTU通信实例

与西门⼦PLC实现Modbus-RTU通信实例⼀、准备⼯具及材料1.台式电脑⼀台,笔记本电脑⼀台;2.西门⼦200smart PLC⼀台,3.多功能电表DW9L-RC38或DS9L或DS7L⼀台,温控表TE系列⼀台,4.仪表说明书及通讯协议,5.9针接⼝通讯线⼀根,6.USB转RS485转换器⼀台,7.电源线,⽹线、⽹络交换机等。
⼆、软件安装软件名称:STEP 7-MicroWIN SMART,可从西门⼦⽹站下载。
三、梯形图编程1.主要编程思路PLC使⽤⾃带的RS485接⼝与仪表进⾏通信连接,PLC作为主站,仪表为从站,使⽤标准Modbus-RTU通讯协议。
调⽤编程软件⾃带的Modbus协议库,实现与仪表的数据通信。
2.MBUS_CTRL 和 MBUS_MSG 指令介绍本⽰例使⽤单个主站及 MBUS_CTRL 和 MBUS_MSG 指令。
同⼀理念对使⽤第⼆个主站及 MB_CTRL2 和 MB_MSG2 指令的⽰例同样适⽤。
3.电⼒仪表通信协议:4.梯形图编程(1)设置PLC型号(2)设置库存储器的地址分配(系统已分配VB0~VB285⽤于modbus通信使⽤,我们就从VB286开始)(3)编辑符号表(4)编辑状态图表(5)编制第⼀、⼆段:置位标志位及通讯初始化:波特率Baud=9600,Parity=0⽆校验,Port=0集成CPU内RS485⼝,Timeout从站响应超时50ms。
Done初始化完成返回"TURE",Error输出错误结果。
(6)程序3-4:当MBUS_CTRL初始化完成后,M0.0 从关闭变为接通时,延时T33=10mS时间后,置位第⼀条 MBUS_MSG 指令的启⽤标志 (M2.0)=1。
(7)程序5:读第⼀台从机设备,地址1,型号DW9L或DS9L或DS7L。
当第⼀个启⽤标志 (M2.0) 接通后,调⽤ MBUS_MSG 指令。
只需为启⽤该指令的第⼀次扫描设置 First 参数。
plc与多台变频器modbus通信实例
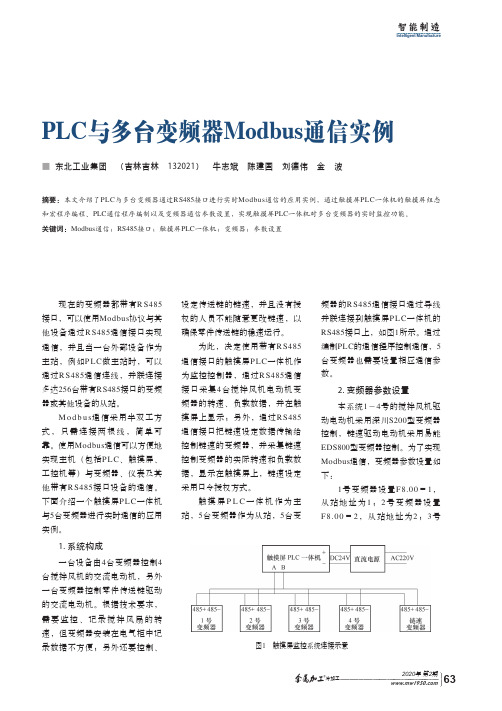
2020年 第2期冷加工63智能制造Intelligent ManufacturePLC 与多台变频器Modbus 通信实例■■东北工业集团 (吉林吉林 132021) 牛志斌 陈建国 刘德伟 金 波摘要:本文介绍了PLC 与多台变频器通过RS485接口进行实时Modbus 通信的应用实例,通过触摸屏PLC 一体机的触摸屏组态和宏程序编程、PLC 通信程序编制以及变频器通信参数设置,实现触摸屏PLC 一体机对多台变频器的实时监控功能。
关键词:Modbus 通信;RS485接口;触摸屏PLC 一体机;变频器;参数设置现在的变频器都带有R S485接口,可以使用Modbus 协议与其他设备通过R S485通信接口实现通信,并且当一台外部设备作为主站,例如P L C 做主站时,可以通过R S485通信连线,并联连接多达256台带有RS485接口的变频器或其他设备的从站。
M o d b u s 通信采用半双工方式,只需连接两根线,简单可靠。
使用Modbus 通信可以方便地实现主机(包括P L C 、触摸屏、工控机等)与变频器、仪表及其他带有R S485接口设备的通信。
下面介绍一个触摸屏P L C 一体机与5台变频器进行实时通信的应用实例。
1. 系统构成一台设备由4台变频器控制4台搅拌风机的交流电动机,另外一台变频器控制零件传送链驱动的交流电动机。
根据技术要求,需要监控、记录搅拌风扇的转速,但变频器安装在电气柜中记录数据不方便;另外还要控制、设定传送链的链速,并且没有授权的人员不能随意更改链速,以确保零件传送链的稳速运行。
为此,决定使用带有R S485通信接口的触摸屏P LC 一体机作为监控控制器,通过R S485通信接口采集4台搅拌风机电动机变频器的转速、负载数据,并在触摸屏上显示;另外,通过R S485通信接口把链速设定数据传输给控制链速的变频器,并采集链速控制变频器的实际转速和负载数据,显示在触摸屏上,链速设定采用口令授权方式。
S7-200PLC之间进行Modbus通讯实验
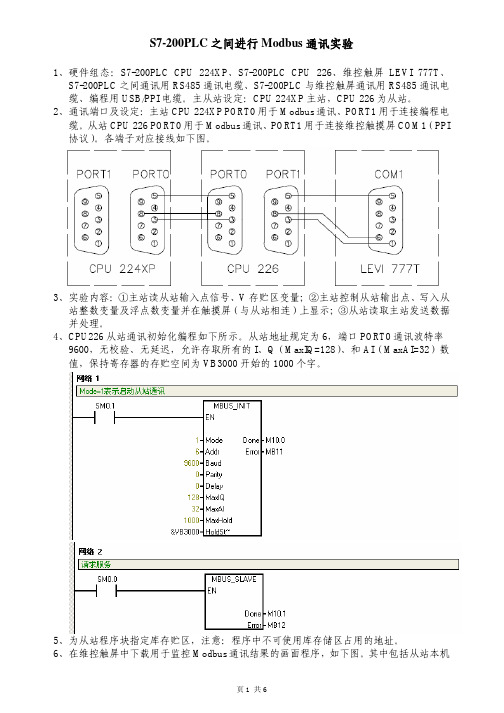
1、硬件组态:S7-200PLC CPU 224XP、S7-200PLC CPU 226、维控触屏LEVI 777T、S7-200PLC之间通讯用RS485通讯电缆、S7-200PLC与维控触屏通讯用RS485通讯电缆、编程用USB/PPI电缆。
主从站设定:CPU 224XP主站,CPU 226为从站。
2、通讯端口及设定:主站CPU 224XP PORT0用于Modbus通讯、PORT1用于连接编程电缆。
从站CPU 226 PORT0用于Modbus通讯、PORT1用于连接维控触摸屏COM1(PPI 协议)。
各端子对应接线如下图。
3、实验内容:①主站读从站输入点信号、V存贮区变量;②主站控制从站输出点、写入从站整数变量及浮点数变量并在触摸屏(与从站相连)上显示;③从站读取主站发送数据并处理。
4、CPU226从站通讯初始化编程如下所示。
从站地址规定为6,端口PORT0通讯波特率9600,无校验、无延迟,允许存取所有的I、Q(MaxIQ=128)、和AI(MaxAI=32)数值,保持寄存器的存贮空间为VB3000开始的1000个字。
5、为从站程序块指定库存贮区,注意:程序中不可使用库存储区占用的地址。
6、在维控触屏中下载用于监控Modbus通讯结果的画面程序,如下图。
其中包括从站本机输入点I0.0~I0.7的状态、输出点Q0.0~Q0.7(受主上控制),以及从站Modbus通讯保持寄存器VB3000~VB3013内容、整数VW3000、浮点数VD3000和VD3008内容等。
7、准备好主站通讯程序。
为主站程序块指定库存贮区,注意:程序中不可使用库存储区占用的地址。
程序如下所示(上电初始化程序实际应用时要放在网络1),其中主站输入点I1.0用于触发数据传送,VB3000用于存贮读从站输入点数据,VB5000用于存贮要写入从站控制输出点的数据,VB6000用于存贮要写入从站V存贮区的数据,VB7000用于存贮由从站读取的V存贮区数据(用于验证写从站结果)。
施耐德PLC与PLC通讯ModbusTcp

施耐德_PLC与PLC通讯ModbusTCP一、系统概括M218 PLC中TM218LDAE24DRHN/TM218LDAE40DRPHN两款PLC,本体集成了以太网通讯口,支持ModbusTCP/IP 通讯协议可做ModbusTCP服务器/客户端,该以太网口可用于与其它支持ModbusTCP/IP协议的设备之间的数据通讯;本文以两台M218 PLC为例, 简要介绍M218PLC与M218PLC之间Modbus以太网通信的过程,包括硬件接线、参数设置、硬软件组态等,实现一台PLC对另一台PLC的数据读写;二、硬件连接两台M218 PLC间的连接网线可采用直通线也可采用交叉线,系统的硬件构架和连接如下本文以交叉网线为例;三、主站PLC1.新建PLC程序2.PLC通讯参数设置从站PLC以太网端口设置过程相同,只需将IP地址设为同一网段不同地址即可3.主站程序编程1)添加功能块”IsFirstMastColdCycle”,目的:第一次启动触发modbus读写模块.方法:从右侧工具箱中选中”运算块”拖到编程窗口,之后寻到”IsFirstMastColdCycle”后回车即可;2)添加功能块” ADDM”目的:Modbus地址功能块方法:类似添加第一功能块的方法Addr 参数中写入’3{}’,其中3表示本PLC以太网口,表示ModbusTCP 从站IP地址;3)添加READ_VAR模块4)添加”WRITE_VAR”模块5)读写缓存数据区在”Read_Var”和”Write_Var”功能块的调用过程中,用户需要定义数据读和写的缓存区,用于存放接收到的数据和需要发送的数据;注意,这里的缓存区一般都是以数组的形式存在的,所以用户必须分别定义读数据数组和写数据数组,例如,上例中的”aaa”和”bbb”分别就是用于存放读到的数据和写出去的数据;由于”Read_Var”和”Write_Var”功能块的管脚”Buffer”是指针变量,所以用 ADR 功能块来取数组的首地址来指向该”Buffer”指针;这里,简单介绍下数组的定义方法.6)编写循环触发读写条件使用一个“OR”功能块,执行写功能后再次执行该段程序。
PLC的MODBUS通信实例

PLC的MODBUS通信实例随着工业时代的发展,工业自动化控制已进入网络时代,工业控制器连网也为网络管理提供了方便。
MODBUS通信就是工业控制器的网络协议中的一种。
关键词: MOBUS通信协议,RS485,奥越信CPU,程序设计一、MODBUS 简介MODBUS是由Modicon(现为施耐德电气公司的一个品牌)在1979年发明的,是全球第一个真正用于工业现场的总线协议。
当现代的控制领域持续不断的产生和应用诸如现场总线和网状网络等先进概念的时候,MODBUS的简单性以及它的便于在许多通讯媒介上实施应用的特点一直使它受到最广泛的支持,并且成为全球应用最广泛的工业协议。
通过此协议,控制器经由网络(例如以太网)和其它设备之间可以通信,此协议支持传统的RS-232、RS-422、RS-485和以太网设备。
许多工业设备,包括PLC、DCS、变频器、智能仪表等都在使用MODBUS协议作为他们之间的通讯标准,它可应用于各种数据采集和过程监控。
二、MODBUS协议库1、使用MOBUS协议的部分要求A、初始化MODBUS从站协议占用Port0 作为MODBUS从站协议通信,MODBUS从站协议只支持端口0通信,所以选择奥越信的双通信的CPU,可以把Port1作为编程通信口,以便于调试;如果只有单通信口的话,可把CPU打到STOP模式在编程。
B、MODBUS从站协议指令的变量要求799字节的V区域,该区域的起始地址由用户指定,保留给MODBUS使用,程序中不可以使用库存储区占用的地址。
C、可参照S7-200编程手册中了解MODBUS指令的设置与编写。
2、MODBUS协议允许在各种网络体系结构内进行简单通信。
如图所示:A、每种设备(PLC、HMI、控制面板、驱动程序、动作控制、输入/输出设备)都能使用MODBUS协议来启动远程操作。
B、在基于串行链路和以太网络的MODBUS上可以进行相同通信。
C、一些网关允许在几种使用MODBUS协议的总线或网络之间进行通信。
MODBUS通讯协议及PLC编程通讯实例

MODBUS通讯协议及编程ModBus通讯协议分为RTU协议和ASCII协议,我公司的多种仪表都采用ModBus RTU 通讯协议,如:YD2000智能电力监测仪、巡检表、数显表、光柱数显表等。
下面就ModBu s RTU协议简要介绍如下:一、通讯协议(一)、通讯传送方式:通讯传送分为独立的信息头,和发送的编码数据。
以下的通讯传送方式定义也与MO DBUS RTU通讯规约相兼容:初始结构= ≥4字节的时间地址码 = 1 字节功能码 = 1 字节数据区 = N 字节错误校检 = 16位CRC码结束结构= ≥4字节的时间地址码:地址码为通讯传送的第一个字节。
这个字节表明由用户设定地址码的从机将接收由主机发送来的信息。
并且每个从机都有具有唯一的地址码,并且响应回送均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通讯传送的第二个字节。
ModBus通讯规约定义功能号为1到127。
本仪表只利用其中的一部分功能码。
作为主机请求发送,通过功能码告诉从机执行什么动作。
作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。
如果从机发送的功能码的最高位为1(比如功能码大与此同时127),则表明从机没有响应操作或发送出错。
数据区:数据区是根据不同的功能码而不同。
数据区可以是实际数值、设置点、主机发送给从机或从机发送给主机的地址。
CRC码:二字节的错误检测码。
(二)、通讯规约:当通讯命令发送至仪器时,符合相应地址码的设备接通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务;然后把执行结果返送给发送者。
返送的信息中包括地址码、执行动作的功能码、执行动作后结果的数据以及错误校验码。
如果出错就不发送任何信息。
1.信息帧结构地址码:地址码是信息帧的第一字节(8位),从0到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
西门子200PLCmodbus通讯实例(带程序)
西门子200PLCmodbus通讯实例(带程序)
1、在实际应用中,现场不只有plc,还会有智能数显表,上位机通过2个设置多个串口分别读取PLC、智能仪表数据简单不过,但如何实现1个串口读取不同设备数据
2、首先配置好智能仪表从站通讯参数,拿9600 8 1 none 地址3举例
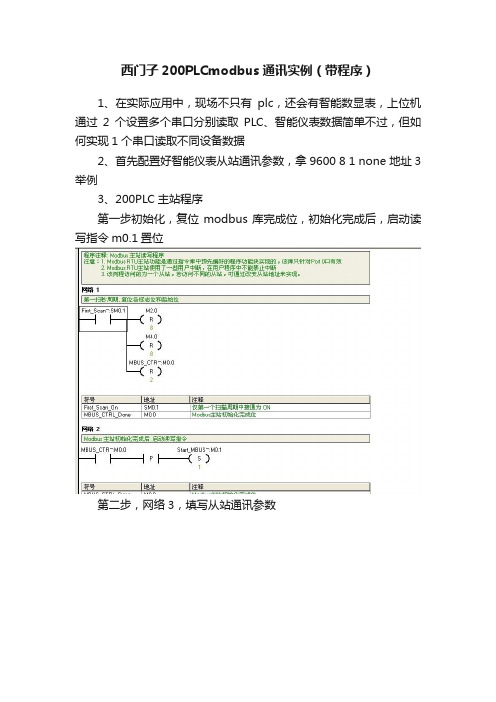
3、200PLC主站程序
第一步初始化,复位modbus库完成位,初始化完成后,启动读写指令m0.1置位
第二步,网络3,填写从站通讯参数
第3步M0.1置位读取从站数据,读取保持寄存器40001-40008 8个数据根据数据格式写入&VB1000,如40001 40002为32位浮点数,则保存在VB1000 VB1001 VB1002 VB1003中,依次类推,读取完成M2.1置位,复位读取从站保持寄存器M0.1 M2.3
读取输入寄存器,读取完成M2.2置位,复位M2,.1
M2.2置位,写数据开始,VB3000写入00001中,写完成,M2.3置位,开始读,M2.2复位。
来源:工控人家园、台达plc教程、工控产品有哪些、三菱plc安装、工控plc书籍、电工论坛、plc模拟量输入模块、工控论坛、()(微信/QQ:503660666) 欢迎分享本文,转载请保留出处!。
【案例】S7-200SMARTPLC与台达变频器MODBUS通信

【案例】S7-200SMARTPLC与台达变频器MODBUS通信↖戳上⽅蓝字 "PLC发烧友” 关注我们哦!1、控制要求I0.0启动变频器正转,I0.1启动变频器反转,I0.2停⽌变频器,PLC通过MODBUS通讯读取台达变频器当前电流和当前电压。
2、变频器参数变频器参数的通信地址是2000H,Modbus通信功能码是0(离散量输出)1(离散量输⼊)、3(输⼊寄存器)、4(保持寄存器)。
⽽这⾥的2000H指的就是4(保持寄存器)同时这个2000H是⼗六进制数2000,在软件中输⼊的是⼗进制数,故需要将⼗六制数2000 转换为⼗进制数,得到8192。
另外Modbus 的通信地址都是从1开始的。
故还要将8192加上1为8193,最终得到的变频器地址为“48193”。
在控制命令2000H 的地址中,每个位置的含义已经定义好了,Bit2-3和Bit6-15保留,即为0,Bit0-1和Bit4-5表⽰启动及运⾏⽅向,若电动机以反向点动运⾏,则Bit0-1设置为11,1, Bit4-5设置为10,最终得到2#10011。
将2#10011 通过通信传输到变频器的2000H中,变频器将会按照设定的⽅式⼯作。
上表中的2102H频率指令(F)( ⼩数2位)中,⼩数2位的含义是指:频率范围是00.00 -50.00Hz,频率是⼀个实数,但是⼀个实数占⽤32位,Modbus通信的保持寄存器区每次通信的单位是字,并不能直接传输⼩数。
因此在通信过程中我们读到的频率信息是放在两个字⾥边的,第⼀个字中存储的是⼀个 4位⼗进制数,例如0612,但是我们都知道,频率并没有0612Hz,我们还要读取第⼆个字中的值,第⼆个字中的值表⽰⼩数点的位数,例如2,表⽰⼩数的位数为2位,,因此当前的运⾏频率表⽰为06.12Hz,这才是我们真正读到的频率值。
3、PLC程序I/O分配表4、编写程序第⼀步:(上电初始化将完成标志位M点全部复位,同时将运⾏频率30HZ传送给VW100)第⼆步:(按下I0.0命令值写⼊VW200变频器电机正转、按下I0.1命令值写⼊VW200变频器电机反转、按下I0.2命令值写⼊VW200变频器电机停⽌)第三步:(通信初始化指令,设置通信波特率9600,偶校验,通信端⼝0,通信超时100MS)第四步:(SM0.1⾸次接通写⼊变频器频率指令,M0.4⽤轮询⽅式循环写⼊频率,VW100的频率值写⼊变频器当中,写⼊完成后M0.1接通)第五步:(M0.1接通后,复位M0.4断开写⼊频率指令)第六步:(M0.1接通写⼊变频器运⾏指令,VW200中频率值写⼊变频器当中,写⼊完成后M0.2接通)第七步:(M0.2接通后,复位M0.1断开写⼊运⾏指令)第⼋步:(M0.2接通读取变频器频率指令,读取变频器频率值存放在VW300当中,读取完成后M0.3接通)第九步:(M0.3接通后,复位M0.2断开读取频率指令)第⼗步:(M0.3接通读取变频器电流指令,读取变频器电流值存放在VW400当中,读取完成后M0.4接通)第⼗⼀步:(M0.4接通后,复位M0.3断开读取电流指令)此时此刻S7-200SMART PLC与台达变频器MODBUS通信已编写完成,⼤家都理解并且掌握了吗?可以在上述⽂章找答案!。
西门子PLCs7-1200modbus-tcp通信实例编程详细指导
西门⼦PLCs7-1200modbus-tcp通信实例编程详细指导西门⼦S7-1200 Modbus-TCP通信例⼦【】绝密【】NDA【X】公开⼀、组⽹概述本⽂以 ZKA-4488-ETH 为例介绍西门⼦PLC与深圳市综科智控科技开发有限公司的IO设备进⾏Modbus通讯的步骤设置。
ZKA-4488-ETH 是 8 路数字量输⼊(DI),8 路数字量输出(DO),4路模拟量输⼊(AI,0/4-20mA),4 路模拟量输出设备(AO,0/4-20mA),以太⽹通信。
以 ZKA-4488-ETH 为例,出⼚默认通讯参数如下:ZK模块 IP 为:192.168.0.105TCP 端⼝为:10001(注意:我们模块出⼚时默认端⼝为10001,客户也可以通过ZK模块的配置⽂件把ZK通讯端⼝改成modbus-tcp的默认端⼝502)⼯作模式为:服务器模式⼆、S7-200 Modbus TCP通信1 S7-200 Modbus T CP 通信简介Modbus 是公开通信协议,详细的协议和规范,请访问Modbus 组织的⽹站:/S7-1200 CPU 本体上集成了⼀个 PROFINET 通信⼝,⽀持以太⽹和基于TCP/IP和UDP 的通信标准。
这个PROFINET 物理接⼝是⽀持10/100Mb/s的 RJ45⼝,⽀持电缆交叉⾃适应,因此⼀个标准的或是交叉的以太⽹线都可以⽤于这个接⼝。
使⽤这个通信⼝可以实现 S7-1200 CPU 与编程设备的通信,与HMI触摸屏的通信,以及与其它 CPU 之间的通信,S7-1200 CPU 的PROFINET 通信⼝主要⽀持以下通信协议及服务Profinet IO (V2.0开始)S7 通信(V2.0开始⽀持客户端)TCPISO on TCPUDP(V2.0开始)Modbus TCPHMI通信Web通信(V2.0开始)。
硬件版本V4.1 ⽀持的协议和最⼤的连接资源:S7-1200的连接资源分配给每个类别的预留连接资源数为固定值;您⽆法更改这些值。
汇川plc的modbus指令实例

汇川PLC的Modbus指令实例1. 概述本文将介绍汇川PLC的Modbus指令实例,包括Modbus的基本概念、汇川PLC支持的Modbus协议类型、常用的Modbus指令及其使用方法等内容。
Modbus是一种通信协议,用于在不同设备之间进行数据传输。
它广泛应用于工业控制系统中,包括自动化设备、PLC(可编程逻辑控制器)等。
通过Modbus协议,可以实现设备之间的数据交换和控制。
2. Modbus协议类型汇川PLC支持以下几种Modbus协议类型:•Modbus RTU:基于串行通信,使用二进制格式传输数据。
适用于短距离通信,传输速度较快。
•Modbus ASCII:基于串行通信,使用ASCII码作为字符表示传输数据。
数据传输速度较慢,但相对稳定。
•Modbus TCP:基于以太网通信,使用TCP/IP协议传输数据。
适用于长距离通信,传输速度较快。
3. Modbus指令3.1 读输入寄存器(Read Input Register)功能码: 04H指令格式:起始地址(2字节) | 寄存器数量(2字节)使用示例:读取从地址为1000的输入寄存器,共读取10个寄存器的值。
请求:00 04 00 00 00 0A响应:00 04 02 12 34 56 783.2 读保持寄存器(Read Holding Register)功能码: 03H指令格式:起始地址(2字节) | 寄存器数量(2字节)使用示例:读取从地址为2000的保持寄存器,共读取5个寄存器的值。
请求:00 03 07 D0 00 05响应:00 03 0A 02 00 01 00 02 00 03 00 04 00 053.3 写单个保持寄存器(Write Single Register)功能码: 06H指令格式:寄存器地址(2字节) | 数据(2字节)使用示例:将值为1234写入地址为3000的保持寄存器。
请求:00 06 0B B8 04 D2响应:00 06 0B B8 04 D23.4 写多个保持寄存器(Write Multiple Registers)功能码: 16H指令格式:起始地址(2字节) | 寄存器数量(2字节) | 字节计数(1字节) | 数据(N字节)使用示例:将值为10、20、30写入地址为4000、4001、4002的三个保持寄存器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC的MODBUS通信实例
随着工业时代的发展,工业自动化控制已进入网络时代,工业控制器连网也为网络管理提供了方便。
MODBUS通信就是工业控制器的网络协议中的一种。
关键词:MOBUS通信协议,RS485,奥越信CPU,程序设计
一、MODBUS 简介
MODBUS是由Modicon(现为施耐德电气公司的一个品牌)在1979年发明的,是全球第一个真正用于工业现场的总线协议。
当现代的控制领域持续不断的产生和应用诸如现场总线和网状网络等先进概念的时候,MODBUS的简单性以及它的便于在许多通讯媒介上实施
应用的特点一直使它受到最广泛的支持,并且成为全球应用最广泛的工业协议。
通过此协议,控制器经由网络(例如以太网)和其它设备之间可以通信,此协议支持传统的RS-232、RS-422、RS-485和以太网设备。
许多工业设备,包括PLC、DCS、变频器、智能仪表等都
在使用MODBUS协议作为他们之间的通讯标准,它可应用于各种数据采集和过程监控。
二、MODBUS协议库
1、使用MOBUS协议的部分要求
A、初始化MODBUS从站协议占用PortO作为MODBUS从站协议通信,MODBUS从站协议只支持端口0通信,所以选择奥越信的双通信的CPU,可以把Port1作为编程通信口,以便于调试;如果只有单通信口的话,可把CPU打到STOP模式在编程。
B、MODBUS从站协议指令的变量要求799字节的V区域,该区域的起始地址由用户指定,保留给MODBUS使用,程序中不可以使用库存储区占用的地址。
C、可参照S7-200编程手册中了解MODBUS指令的设置与编写。
2、MODBUS协议允许在各种网络体系结构内进行简单通信。
如图所示:
HM1
ODBl
WDBUS网舍体長结吗鲨矣位
MODBUS通塔
廷K釀
A、每种设备(PLC、HMI、控制面板、驱动程序、动作控制、输入/输出设备)都能使用MODBUS协议来启动远程操作。
B、在基于串行链路和以太网络的MODBUS上可以进行相同通信。
C、一些网关允许在几种使用MODBUS协议的总线或网络之间进行通信。
三、MODBUS编程实例
1、要求:2个CPU进行通信连接,主站每秒QW0输出加1,主站通过MODBUS通信方式将其输出点的数值与从站同步。
2、硬件根据要求,选取了奥越信的CPU224C与CPU224D,两款都带有双通信口,功能也强大,编程测试时比较方便。
3、程序中先对两个CPU的通讯口做了定义及设置,成功通信之后两个CPU的输出点通过MODBUS将会同步输出主从站程序如下图所示:
T37
Af )D _
EN I ENO M
1- i N1 OUT -QV/0 QW0- I N2
MOV_W
EM
ENO 程序注釋
网络1
网络标题
—亠 MBUS_CTFiL.
EN
Mode
Baiid Done
Par*y
Ermr Timeout
■-M0.0 ■MB1
a- 11'lV- QWO- OUT I-VW100
SMOJ
SMQJ SM0.0
J 1 _____________________________________________ MBUS, EN _w 1 [
T37
I |
\ n |
1 1
1 r ( rllSl
2- Slave
Doria 1* RW Enor
40001 - A ddr
2 ■ Cowrit
WB100- DalaPtf
SMO.J T37
IN TON
PT 100 ms
-MC.1 -ME? T37 W-
主站程序
从站程序
四、通信实例总结
根据上述实例我们在做MODBUS通信时,首先要清楚主从站及对应的设备进行设置,保证地址、波特率等等要按要求设置好,选型时尽量考虑多通信口的CPU,这样对编程及调试使用会方便一点,如上诉例子中奥越信的214系列的CPU都是双通讯口的。
硬件选好之后,要想好思路,一步一步的写,最终完成MODBUS的通信。