异步电动机直接转矩控制系统仿真
基于SVPWM的异步发电机模糊直接转矩控制系统仿真

基于SVPWM的异步发电机模糊直接转矩控制系统仿真李岩【摘要】为了解决电机传统直接转矩控制方法中存在转矩和磁链脉动大的问题,本文在研究异步发电机、正弦脉宽调制(SVPWM)、及直接转矩控制算法的基础上,提出了改进型异步发电机直接转矩控制算法.利用Matlab/Simulink仿真平台搭建了异步发电机直接转矩控制算法系统仿真模型,包括电机模块、测量模块、逆变模块、速度和转矩计算调节模块等,并进行系统的仿真分析.从结果可知,与传统异步发电机直接转矩控制算法相比较,改进型直接转矩控制系统控制精度高明显提高、响应速度得到改善、鲁棒特性好,证明了该控制算法的有效性与可行性.【期刊名称】《电子设计工程》【年(卷),期】2014(022)022【总页数】5页(P35-38,41)【关键词】异步发电机;SWPWM;模糊控制;直接转矩;仿真技术【作者】李岩【作者单位】国网内蒙古东部电力有限公司经济技术研究院,内蒙古呼和浩特010020;沈阳工业大学电气工程学院,辽宁沈阳110870【正文语种】中文【中图分类】TM31随之科学技术的发展,电机的控制策略不断进步,德国著名教授M.Depenbrock在上个世纪80年代提出了控制学理论的经典方法即直接转矩控制。
在直接转矩控制理论中,转矩和定子磁链作为变量,省去了传统控制算法中电流和磁场控制环节,所以系统具有控制过程简单、稳定性强和反应速度快等优点。
ABB公司最早把直接转矩技术应用到异步电动机控制领域。
1996年,专家开始研究直接转矩控制技术在永磁同步电动机控制技术中的运用。
经过二十几年的不断探索,直接转矩控制技术得到不断地完善,并在电机控制领域取得广泛应用[1]。
在目前应用的直接转矩控制技术中,使用滞环比较策略对转矩和磁链进行调节,但滞环比较策略的容差值设置直接影响到磁链的变化和转矩波动情。
容差设置的过大,磁链和转矩的波动较大;容差设置的过小,由于自身惯性影响,磁链误差和转矩误差不可避免的超过设置区间,比较器会相应输出个反向控制信号,以减小误差,但会带来顺时转矩和磁链较大波动。
毕业设计(论文)-直接转矩控制的异步电机调速系统仿真研究[管理资料]
![毕业设计(论文)-直接转矩控制的异步电机调速系统仿真研究[管理资料]](https://img.taocdn.com/s3/m/c94ae2c6a32d7375a517805e.png)
引言随着微电子技术、电力电子技术、计算机控制技术的进步,交流电动机调速技术发展到现在,有了长足的进步。
特别是20世纪70年代出现的矢量控制技术和80年代出现的直接转矩控制技术,使交流电动机调速系统的性能可以与直流电动机调速系统的性能相媲美。
而交流电动机尤其是鼠笼异步电动机由于其自身结构和运行特性的优点,使得交流电动机调速系统的优势强于直流电动机调速系统。
在交流电动机控制技术中调压调频控制、矢量控制以及直接转矩控制(Direct Torque Control简称DTC)具有代表性。
其中应用直接转矩控制技术是一种高性能的控制调速技术,直接转矩控制对交流传动来说是一种最优的电动机控制技术,它可以对所有交流电动机的核心变量进行直接控制。
第1章绪论异步电动机调速系统的发展状况在异步电动机调速系统中变频调速技术是目前应用最广泛的调速技术,也是最有希望取代直流调速的调速方式。
就变频调速而言,其形式也有很多。
传统的变频调速方式是采用v/f控制。
这种方式控制结构简单,但由于它是基于电动机的稳态方程实现的,系统的动态响应指标较差,还无法完全取代直流调速系统。
1971年,德国学者EBlaschke提出了交流电动机的磁场定向矢量控制理论,标志着交流调速理论有了重大突破。
所谓矢量控制,就是交流电动机模拟成直流电动机来控制,通过坐标变换来实现电动机定子电流的励磁分量和转矩分量的解藕,然后分别独立调节,从而获得高性能的转矩特性和转速响应特性。
矢量控制主要有两种方式:磁场定向矢量控制和转差频率矢量控制。
无论采用哪种方式,转子磁链的准确检测是实现矢量控制的关键,直接关系到矢量控制系统性能的好坏。
一般地,转子磁链检测可以采用直接法或间接法来实现。
直接法就是通过在电动机内部埋设感应线圈以检测电动机的磁链,这种方式会使简单的交流电动机结构复杂化,降低了系统的可靠性,磁链的检测精度也不能得到长期的保证。
因此,间接法是实际应用中实现转子磁链检测的常用方法。
异步电动机直接转矩控制系统仿真
课程设计(论文)题目名称异步电动机直接转矩控制系统仿真课程名称运动控制系统毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:邵阳学院课程设计(论文)任务书注:1.此表由指导教师填写,经系、教研室审批,指导教师、学生签字后生效;2.此表1式3份,学生、指导教师、教研室各1份。
指导教师(签字):学生(签字):邵阳学院课程设计(论文)评阅表学生姓名曾斌学号0841229082系电气工程系专业班级电气一班题目名称三相异步电动机直接转矩控制课程名称运动控制系统一、学生自我总结二、指导教师评定注:1、本表是学生课程设计(论文)成绩评定的依据,装订在设计说明书(或论文)的“任务书”页后面;2、表中的“评分项目”及“权重”根据各系的考核细则和评分标准确定。
摘要直接转矩控制技术在电力机车牵引、汽车工业以及家用电器等工业控制领域得到了广泛的应用。
在运动控制系统中,直接转矩控制作为一种新型的交流调速技术,其控制思想新颖、控制结构简单、控制手段直接、转矩响应迅速,正在运动控制领域中发挥着巨大的作用。
本文分析异步电动机数学模型的基础上,提出了一种基于MATLAB/SIMULINK的交流电机直接转矩控制系统的仿真模型.通过搭建独立的功能模块和模块的有机整合, 得到一个完整的异步电动机控制系统的仿真模型在仿真模型中,定子磁链控制器电磁转矩控制器均采用双电平方式, 仿真结果证明了该方案的合理性和有效性。
三相异步电动机直接转矩控制系统仿真报告
三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM 逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
异步电动机直接转矩控制系统仿真对比研究
异步电动机直接转矩控制系统仿真对比研究卢秉娟,黄会营,姬宣德(洛阳理工学院电气工程与自动化系,河南洛阳471023)摘要:在详细分析异步电动机传统直接转矩控制(BASIC-DTC)系统和空间矢量调制直接转矩控制(S VM-DTC)系统的基础上,本文利用MATLAB仿真平台分别建立了异步电动机BASIC-DTC系统仿真模型和SVM-DTC系统仿真模型,并对两种仿真模型进行了对比仿真。
仿真结果表明:与异步电动机BASIC-DTC系统相比,异步电动机SVM-DTC系统有效地抑制了转矩和磁链脉动,克服了开关频率不固定的缺陷,同时获得了与BASIC-DTC系统一样的动态响应。
关键词:交流调速系统;传统直接转矩控制;空间矢量调制直接转矩控制;系统仿真中图分类号:TM343 文献标识码:AComparative Study of Induction Motor Direct Torque Control System SimulationLU Bing-juan, HUANG Hui-ying, JI Xuan-de(Department of Electrical Engineering and Automation Luoyang Institute of Science and Technology ,Luoyang HeNan 471023, China)ABSTRACT:On the basis of analyzing in detail the Induction Motor BASIC-DTC System and SVM-DTC System, the BASIC-DTC System simulation model and SVM-DTC System simulation model were established with MATLAB simulation platform In this paper, and two kinds of simulation model were comparably simulated. Simulation results showed that Compared with the BASIC-DTC System, the SVM-DTC System makes the torque and flux ripple reduced, and overcomes the disadvantages of Non-constant switching frequency, and the same dynamic response is also acquired as the BASIC-DTC. KEYWORDS:AC Drive System; BASIC-DTC; SVM-DTC; System Simulation基金项目:河南省教育厅自然科学研究计划项目(2010B470009)1 引言异步电动机直接转矩控制技术是继异步电动机矢量控制技术之后又一高性能的电动机控制方法,它很大程度上解决了矢量控制算法复杂、控制性能易受电机转子参数变化影响等缺点,为感应电动机的高性能控制开辟了崭新方向。
基于SVPWM的异步电机直接转矩控制仿真研究
1 引言1.1交流调速技术的发展和现状在工农业生产、科技、国防及日常生活等各个领域,电动机作为主要的动力设备被广泛应用。
直流电动机相比于交流电动机,结构复杂、体积大、成本和维护费用高,并且不适于环境恶劣的场合,但凭借控制简单、调速平滑和性能良好等特点在早期电气传动领域中一直占据主导地位[1]。
从20世纪30年代开始,人们就致力于交流调速技术的研究。
特别是20世纪60年代以后,电力电子技术和控制技术的飞速发展,使得交流调速性能得到很大的提高,在实际应用领域也得到认可和快速的普及。
交流调速的发展可以说是硬件和软体的发展过程[3]。
随着电力电子技术、微处理器技术和自动化控制技术的不断完善和发展,使得交流调速系统的调速范围宽、速度精度高和动态响应快,其技术性能可与直流调速系统相媲美、相竞争,并在工程应用领域中逐渐取代直流调速系统[5]。
交流电动机的高效调速方法是变频调速,它不但能实现无级调速,而且根据负载的特性不同,通过适当调节电压和频率之间的关系,可使电机始终高效运行,并保证良好的动态特性,更能降低起动电流、增加起动转矩和改善电机的起动性能。
交流调速控制理论的发展经历了电压-频率控制、矢量控制、直接转矩控制,控制理论的发展使控制系统性能不断提高[2]。
电压-频率协调控制,即恒压频比控制,是指在基频以下调速时维持输出电压幅值和频率的比值恒定,实现恒转矩调速运行;在基频以上调速时,将输出电压维持在额定值,使磁通与频率成反比下降,实现弱磁恒功率调速运行。
其控制系统结构简单,成本低,能满足一般的平滑调速,但动、静态性能有限,适用于风机、水泵等负载对调速系统动态性能要求不高的场合[8]。
矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器的矢量控制方式和有速度传感器的矢量控制方式等[12]。
这样就可以将一台三相异步电机等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。
三相异步电动机直接转矩控制(DTC)系统仿真
1 直接转矩控制简介直接转矩控制(Direct Torque Control——DTC),国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。
直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。
这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现PWM脉宽调制和系统的高动态性能。
直接转矩控制系统的主要特点有:(1)直接转矩控制是直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。
(2)直接转矩控制的磁场定向采用的是定子磁链轴,只要知道定子电阻就可以把它观测出来。
(3)直接转矩控制采用空间矢量的概念来分析三相交流电动机的数学模型和控制各物理量,使问题变得简单明了。
(4)直接转矩控制强调的是转矩的直接控制效果。
直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM 波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的PWM 信号发生器。
它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。
2 直接转矩控制的理论基础2.1直接转矩控制的原理ψ的正负符号和电磁直接转矩控制系统的基本思想是根据定子磁链幅值偏差ΔSψ所在位置,直接选取合适的转矩偏差ΔTe的正负符号,再依据当前定子磁链矢量S电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩和定子磁链的控制。
直接转矩控制是为电压源型PWM逆变器传动系统提出的一种先进的转矩控制技术,基于该技术的传动系统性能可与矢量控制的异步电动机传动系统性能相媲美。
三相异步电动机直接转矩控制系统仿真报告

三相异步电动机直接转矩控制系统仿真报告 Document number:PBGCG-0857-BTDO-0089-PTT1998三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
三相异步电机直接转矩控制系统DTC仿真
目录摘要 (I)1 设计总体思路 (1)1.1主电路的设计 (1)1.2 基本原理 (1)2 单元电路设计 (3)2.1 直接转矩控制系统模型 (3)2.2 转速控制器 (4)2.3 直接转矩控制器 (4)2.4 转矩和定子磁链的计算 (5)2.5 磁通和转矩滞环控制器 (6)2.6 磁链选择器 (6)2.7 开关表 (7)2.8 开关控制模块 (8)3 实验仿真、实验波形记录及分析 (9)4 总结 (12)5 附录 (13)参考文献 (14)1 设计总体思路1.1主电路的设计直接转矩控制系统简称DTC(Direct torque control)系统,是继矢量控制系统之后发展起来的另一种高动态性能的交流电动机变压变频调速系统。
在他的转速环里面,利用转矩反馈直接控制电动机的电磁转矩,因而得名。
直接转矩控制系统的基本思想是根据定子磁链幅值偏差s ψ∆的正负符号和电磁转矩偏差e T ∆的正负符号,再根据当前定子磁链的矢量s ψ所在的位置,直接选取合适的电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩与定子磁链的控制。
系统主电路如图1.1所示,由三相不控桥、交流母线、三相逆变器和异步电机组成,2812DSP 的脉冲信号控制全控器件的导通。
图1.1 系统主电路图1.2 基本原理直接转矩控制系统的原理结构如图1.2示,途中的A R ψ和ATR 分别为定子磁链调节器和转矩调节器,两者均采用带有滞环的双位式控制器,他们的输出分别为定子磁链幅值偏差s ψ∆的符号函数sgn(s ψ)和电磁转矩偏差e T 的符号函数sgn(e T ∆),如图1.2所示。
图中,定子磁链给定*s ψ与实际转速ω有关,在额定转速以下,e T ∆保持恒定,在额定转速以上,*s ψ随着ω的增加而减小。
P/N 为给定转矩极性鉴别器,当渴望的电磁转矩为正时,P/N=1,当渴望的电磁转矩为负时,P/N=0,对于不同的电磁转矩期望值,同样符号函数sgn(e T ∆)的控制效果是不同的。
基于svpwm的异步电机直接转矩控制原理及仿真-大学论文
毕业论文Array二○一四年六月基于SVPWM的异步电机直接转矩控制原理及仿真专业班级:电气工程及其自动化1班姓名:指导教师:轮机工程学院摘要本文首先论述了交流调速系统的发展与现状,简要回顾了电力电子器件、直接转矩控制技术、空间矢量脉宽调制技术的发展历程。
接着,系统地论述了直接转矩控制系统的原理,直接转矩控制技术是继矢量控制技术后发展的有一种高性能交流调速技术,它采用空间矢量的分析方式,在两相静止坐标系下计算并控制电机的电磁转矩和磁链。
不过,直接转矩控制技术作为一种较新颖的技术,自然存在着不少的问题,比如电流与转矩的脉动问题等。
本论文针对传统直接转矩控制系统所固有的问题,提出了基于空间矢量调制技术的直接转矩控制策略。
这种新型控制策略将两者的优点结合起来,把电动机和PWM逆变器看成一体,使电动机获得幅值恒定的近似圆形的磁场,以解决其转矩、电流脉动问题。
在论文的撰写阶段,本人做了如下的工作:通过理论分析,建立了两相静止坐标系下的异步电机数学模型,设计转矩和磁链观测模块,设计坐标变换模块,设计SVPWM生成模块。
最后使用Simulink进行仿真,根据原理,搭建出各个模块的仿真图,仿真实验结果表明,此种控制策略可以减少电磁转矩以及电流的脉动,大大提高直接转矩控制系统的控制性能。
关键词:异步电动机;直接转矩;空间矢量脉宽调制;MATLABABSTRACTFirstly, this thesis discusses the current situation and development of the alternating current governor system. And briefly retrospect the development history of power electronic devices, direct torque control system, and space vector pulse width modulation. Then systematically discuss the theory of direct torque control. It’s an alternating current governor technology with high performance developed after vector control technology, which adopts the analysis method of space vector to calculate and control the electromagnetic torque and flux linkage of motor in the two-phase static coordinate. However, naturally, there are some problems, such as the pulsation problem of current and electromagnetic torque in direct torque control technology for it is a rather novel technology. This thesis puts forward a control policy of direct torque control system based on space vector PWM aiming at the inherent problems of traditional direct torque control system.This new control policy combines two technologies together seeing the electromotor and PWM inverter as a whole to make a circular magnetic field with a constant amplitude to solve the pulsation problem of current and electromagnetic torque. In the period of writing this thesis, I have done the work as follows: Through the theory analysis, build the mathematical model of asynchronous motor in the two-phase static coordinate, and design the observation modules of torque and flux linkage, the coordinate transformation modules, and SVPWM generating modules.Lastly, I use Simulink to simulate them, building every simulation diagram according to the theory. And the result indicates that this control policy can promote the control performance of direct torque control system greatly through reducing the pulsation of torque and current.Keywords:Asynchronous motor,Direct torque control,Space vector pulse width modulation,MATLAB目录第1章绪论 (1)1.1 交流调速系统的发展与现状 (1)1.1.1 交流调速系统的硬件发展 (1)1.1.2 交流调速系统控制方法的发展 (1)1.2 直接转矩控制技术的发展与现状 (2)1.3 空间电压矢量调制技术(即SVPWM)的发展以及现状 (3)1.4 本章小结 (4)第2章异步电动机的数学模型 (5)2.1 三相静止坐标系下的异步电机数学模型 (5)2.2坐标变换 (6)2.2.1 三相—两相静止坐标变换 (6)2.2.2 两相—两相旋转坐标变换 (7)2.3 交流异步电动机在静止两相坐标系下的动态数学模型: (8)2.4 本章小结 (9)第3章直接转矩控制系统原理 (10)3.1直接转矩控制系统结构框图 (10)3.2 磁链控制闭环与转矩控制闭环 (10)3.2.1 磁链控制闭环 (10)3.2.2 转矩控制闭环 (13)3.3 逆变器 (14)3.4电压空间矢量选择 (15)3.5扇区判断 (16)3.6本章小结 (17)第4章空间矢量脉宽调制技术 (18)4.1 空间矢量脉宽调制原理 (18)4.2 期望电压空间矢量的获得 (21)4.3 SVPWM调制算法 (22)4.4 本章小结 (22)第5章基于SVPWM异步电机直接转矩控制系统 (23)5.1 基于SVPWM 直接转矩控制系统 (23)5.2磁链定向方式 (23)5.3 DTC-SVM的扇区判断 (24)5.4空间电压矢量调制 (26)5.5 本章小结 (28)第6章DTC-SVM仿真研究 (29)6.1 MATLAB/Simulink的简介 (29)6.2 基本仿真模块 (29)6.3 坐标变换仿真模块 (29)6.3.1三相—两相静止坐标仿真模块 (30)6.3.2 旋转坐标变换仿真模块 (30)6.4 转矩观测仿真模块 (30)6.5 磁链观测仿真模块图 (31)6.6 SVPWM仿真模块 (31)6.6.1 SVPWM模块仿真图 (32)6.6.2扇区判断仿真模块 (32)6.6.3基本电压空间矢量工作时间计算仿真模块 (32)6.6.4逆变器导通时刻计算 (34)6.6.5 SVPWM波生成模块 (34)6.7仿真实验结果 (35)6.7.1 定子磁链轨迹比较 (35)6.7.2定子电流比较 (36)6.7.3 转速响应比较 (38)6.7.4 转矩响应比较 (39)6.8 本章小结 (40)第7章结论 (41)参考文献 (42)致谢 (43)附录1 (44)附录2 (45)第1章绪论1.1 交流调速系统的发展与现状一直以来,直流调速系统以其简单而优越的调速性能,掩盖了其具有结构复杂,换向麻烦等缺点,被广泛地应用。
异步电动机直接转矩控制的MATLAB仿真研究
1 绪论
1.1 交流调速系统的主要类型
交流电机主要分为异步电机(即感应电机)和同步电机两大类,每类电机又有不同 类型的调速系统。 按电动机的调速方法分类常见的交流调速方法有: (1)降电压调速; (2)转差离合器调速; (3)转子串电阻调速; (4)绕线电机串级调速或双馈电机调速; (5)变极对数调速; (6)变压变频调速等等。 在研究开发阶段,人们从多方面探索调速的途径,因而种类繁多是很自然的。现在 交流调速的发展已经比较成熟,为了深入掌握其基本原理,就不能满足于这种表面上的 罗列,而要进一步探讨其本质,认识交流调速的基本规律。 电动机的能量转换类型 按照交流异步电机的原理,从定子传入转子的电磁功率可分成两部分:一部分是拖 动负载的有效功率,称作机械功率;另一部分是传输给转子电路的转差功率,与转差率 s 成正比。他们的公式关系见公式(1-1) 、 (1-2) 、 (1-3) 。 Pm = Pmech + Ps Pmech = (1 –s) Pm Ps = sPm
异步电动机的定子磁链模型 ………………………………………………………… 19 3.1 定子磁链模型 ………………………………………………………………… 3.2 转矩调节器与磁链调节器 …………………………………………………… 3.2.1 转矩调节器 …………………………………………………………… 3.2.2 磁链调节器 …………………………………………………………… 17 18 19 19
第 1 页 共 33 页
异步电动机直接转矩控制 MATLAB 仿真研究
时) 。可是这类系统结构简单,设备成本最低,所以还有一定的应用价值。 ② 转差功率馈送型调速系统 在这类系统中, 除转子铜损外, 大部分转差功率在转子侧通过变流装置馈出或馈入, 转速越低,能馈送的功率越多,上述第(4)种调速方法属于这一类。无论是馈出还是 馈入的转差功率,扣除变流装置本身的损耗后,最终都转化成有用的功率,因此这类系 统的效率较高,但要增加一些设备。 ③ 转差功率不变型调速系统 在这类系统中,转差功率只有转子铜损,而且无论转速高低,转差功率基本不变, 因此效率更高,上述的第(5) 、 (6)两种调速方法属于此类。其中变极对数调速是有级 的, 应用场合有限。 只有变压变频调速应用最广, 可以构成高动态性能的交流调速系统, 取代直流调速;但在定子电路中须配备与电动机容量相当的变压变频器,相比之下,设 备成本最高[1]。
异步电动机直接转矩控制系统的MATLAB仿真

异步电动机直接转矩控制系统的MATLAB仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电动机直接转矩控制系统(Direct Torque Control, DTC)已成为电动机控制领域的重要研究方向。
该控制系统以其快速响应、高鲁棒性和简单的结构特性,在电力驱动、工业自动化、新能源汽车等领域具有广泛的应用前景。
本文旨在通过MATLAB仿真平台,对异步电动机直接转矩控制系统进行深入研究和探讨。
本文将首先介绍异步电动机直接转矩控制的基本原理和主要特点,包括其与传统矢量控制方法的区别和优势。
随后,将详细阐述异步电动机的数学模型,以及DTC系统中转矩和磁链的控制策略。
在此基础上,利用MATLAB/Simulink仿真软件,构建异步电动机DTC系统的仿真模型,并对仿真模型中的关键参数和模块进行详细设计。
本文的重点在于通过仿真实验,分析异步电动机DTC系统的动态性能和稳态性能,探讨不同控制参数对系统性能的影响。
将针对仿真结果中出现的问题和不足,提出相应的改进措施和优化策略,以提高DTC系统的控制精度和稳定性。
本文将对异步电动机直接转矩控制系统的未来发展趋势和应用前景进行展望,为相关领域的研究人员和工程师提供参考和借鉴。
二、异步电动机直接转矩控制系统理论基础异步电动机直接转矩控制系统(Direct Torque Control, DTC)是一种高效的电机控制策略,旨在直接控制电机的转矩和磁链,从而实现快速动态响应和优良的控制性能。
与传统的矢量控制相比,DTC具有算法简单、易于数字化实现、对电机参数变化不敏感等优点。
异步电动机DTC系统的理论基础主要建立在电机转矩和磁链的直接控制上。
在DTC中,通过检测电机的定子电压和电流,利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)或滞环比较器(Hysteresis Comparator)等控制手段,直接计算出所需的电压矢量,以实现对转矩和磁链的快速调节。
毕业设计(论文)-直接转矩控制的异步电机调速系统仿真研究[管理资料]
引言随着微电子技术、电力电子技术、计算机控制技术的进步,交流电动机调速技术发展到现在,有了长足的进步。
特别是20世纪70年代出现的矢量控制技术和80年代出现的直接转矩控制技术,使交流电动机调速系统的性能可以与直流电动机调速系统的性能相媲美。
而交流电动机尤其是鼠笼异步电动机由于其自身结构和运行特性的优点,使得交流电动机调速系统的优势强于直流电动机调速系统。
在交流电动机控制技术中调压调频控制、矢量控制以及直接转矩控制(Direct Torque Control简称DTC)具有代表性。
其中应用直接转矩控制技术是一种高性能的控制调速技术,直接转矩控制对交流传动来说是一种最优的电动机控制技术,它可以对所有交流电动机的核心变量进行直接控制。
第1章绪论异步电动机调速系统的发展状况在异步电动机调速系统中变频调速技术是目前应用最广泛的调速技术,也是最有希望取代直流调速的调速方式。
就变频调速而言,其形式也有很多。
传统的变频调速方式是采用v/f控制。
这种方式控制结构简单,但由于它是基于电动机的稳态方程实现的,系统的动态响应指标较差,还无法完全取代直流调速系统。
1971年,德国学者EBlaschke提出了交流电动机的磁场定向矢量控制理论,标志着交流调速理论有了重大突破。
所谓矢量控制,就是交流电动机模拟成直流电动机来控制,通过坐标变换来实现电动机定子电流的励磁分量和转矩分量的解藕,然后分别独立调节,从而获得高性能的转矩特性和转速响应特性。
矢量控制主要有两种方式:磁场定向矢量控制和转差频率矢量控制。
无论采用哪种方式,转子磁链的准确检测是实现矢量控制的关键,直接关系到矢量控制系统性能的好坏。
一般地,转子磁链检测可以采用直接法或间接法来实现。
直接法就是通过在电动机内部埋设感应线圈以检测电动机的磁链,这种方式会使简单的交流电动机结构复杂化,降低了系统的可靠性,磁链的检测精度也不能得到长期的保证。
因此,间接法是实际应用中实现转子磁链检测的常用方法。
基于Matlab_Simulink的异步电机直接转矩控制系统仿真_何萍
, 2# ! . ) ! # !’ 2 , ’ . ) # ! . " & , )’$ 2 # ! ! . "
[ ]
( ) !
" $ " 2 $ , ’$ ! " ! 式中,- 5 ( 。 ./ ’ ’ 6’$) * ) 磁链方程为
电气应用 ! " " #年第! $卷第%期
基于 8 5 ’ # 5 6/ . / 0 $ # / 1 2的异步电机直接转矩控制系统仿真
$* ’ 2 ’$ 2# * ! / * ! ! # ! ! # $* 2 ’ 2 ’$ * * * " " $ $* ’$ 2 ’ 2 * ! ) ) !
" $ "2 $* " 转矩方程为
( ) -
’$
2
$ " $ ’ * ) ) " ( ) 7
( ! 0( $ " * * * * !) 4 $* " ) $* " 运动方程为
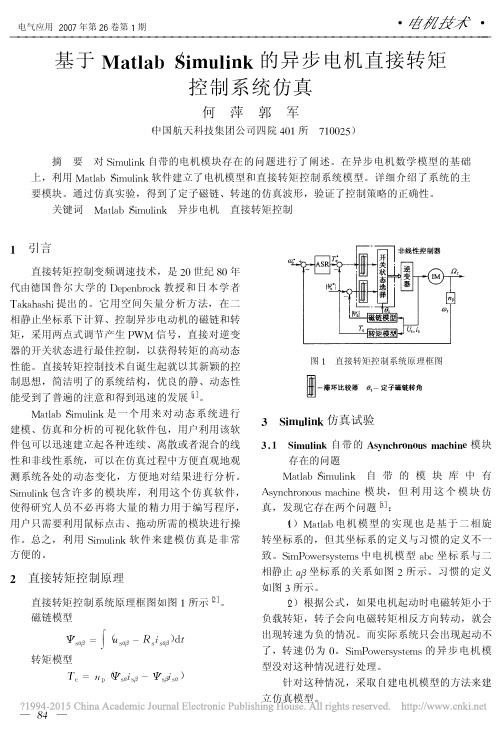
, 引言
直接转矩控制变频调速技术,是% "世纪2 "年 代由德国鲁尔大学的 3 4 4 , 1 6 7 8 - 教授和日本学者 5 9 / / : / ; : (提出的。它用空间矢量分析方法,在二 相静止坐标系下计算、控制异步电动机的磁链和转 矩,采用两点式调节产生 < =. 信号,直接对逆变 器的开关状态进行最佳控制,以获得转矩的高动态 性能。直接转矩控制技术自诞生起就以其新颖的控 制思想,简洁明了的系统结构,优良的静、动态性
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " ! " ! 直接转矩控制系统仿真模型 直接转矩控制系统的仿真模型如图!所示,磁 链模型 ( )的实现如图 & 所示,先将测得的三 " # $ % 相定子电压和定子电流经过三相 / 二相变换,然后 用积分模块建立起磁链模型。转矩模型 ( ) ’ ( ) $ + * 的实现比较简单,在此省略。
异步电机的直接转矩控制仿真_郭正平
Abstract: The mathematical model of induction motor is established with space vector method and the Matlab Simulink library is used to build the entire simulation system. Induction motor modules, inverter module and the control module are described. The torque and stator flux are calculated in the the control switch stator coordinate system. According to the torque value and the value of the stator flux, is issued. Compared with the vector control, direct torque control can eliminate the complex coordinate transformation, and overcome the dependence on the rotor parameters, showing fast torque response. Results of simulation show that the direct torque control of induction motor has good control effect. Key words: induction motor; direct torque control; simulink
The simulation of induction motor direct torque control
何银辉-异步电动机直接转矩控制系统仿真研究

北京交通大学硕士学位论文异步电动机直接转矩控制系统仿真研究姓名:何映辉申请学位级别:硕士专业:机械电子工程指导教师:李平康20050301托京交通大学硕士学位论文摘要直接转矩控制(DirectTorqueControl,简称DTC)技术是20世纪80年代中期发展起来的交流变频调速技术新型控制策略。
它以自己新颖的控制思想,简洁明了的系统结构,优良的静动态性能得到各国科研工作者的广泛关注和研究。
目前,直接转矩控制技术在国外已成功地应用于大功率交流传动领域。
本文所做的对异步电动机直接转矩控制系统的仿真研究,是国防基金项目“电涡流测功机的智能PID控制”中的一部分。
为了对被测试件进行各种加载性能试验,拖动被测试件的异步电动机必须随时快速、稳定地改变转速及转矩。
采用直接转矩控制技术对此主动机进行控制,能很好地满足整个电涡流测功机系统对驱动性能的要求。
具体工作可归纳为以下几方面:1)介绍直接转矩控制技术及其在电涡流测功机智能PID控制系统中的应用:2)剖析传统直接转矩控制系统的构造,建立异步电动机直接转矩控制系统仿真模型,进行仿真试验,分析传统直接转矩控制系统的性能优劣,发现其主要缺点是产生较大的转矩脉动:3)研究DTC产生较大转矩脉动的原因和目前的解决措施,设计一种新型控制策略,对新策略进行仿真试验的结果表明此方法能明显减小转矩脉动:4)采用VC++编制程序,控制PCL836多功能板卡输出频率可调的PWM脉冲,为新的DTC控制策略的应用打下基础。
关键词:直接转矩控制,变频调速,Matlab/Simulink仿真北京变通人学碳l:学位论文AbstractDTCtechniqueisalleWcontrolstrategyemployedinspeedcontrolbyvariablefrequencydevelopedinthemiddleof1980s.Withitsnovddesign,simplestructure,andexcellentperformance,ithasalreadywonextensiveattentionfrommanyscientificresearchersallovertheworld.Sofar,DTCtechniquehasbeensuccessivelyappliedtothepowerfuldrivinginelectricpowertractionabroad.Theworkofthearticleisapartoftheproject:theintelligentPIDcontrolsystemofElectricalVortexErgograph.Inordertotesttheperformanceoftheobjecttobetested,thespeedandthetorqueoftheasynchronousmotorfordraggingshouldvariablerapidlyandpromptly.DTCsystemcanbefitforthisplant.Theworkcanbesummarizedasfollows:1)TointroducethefunctionofDTCsystemintheintelligentPIDcontrolsystemofElectricalVortexErgograph;2)ToanalyzethestructureoftraditionalDTCsystemandmakemodelonDTCsystemofasynchronousmotormathematicmodel.Thesimulationresultsshowthatthemainshortageofthissystemislargetorquewaveform;3)TosetforthpossiblecausesleadingtothecomparativelylargetorquewavefoITnandthecurrentsolutionsaswell.Toputforwardanewcontrolstrategyinthearticleandcomparisonthesimulationresultsbyusingthetraditionalandnewapproaches;4)TofulfillthePWMpowerfunctionwithadjustablefrequencybyapplyingPCL836multi-functionboardwithVC++programmingcontr01.Keywords:DirectTorqueControlCDTC),SpeedControlbyVariableFrequency,Matlab/Simulinksimulation垄塞窒望查兰堡±兰鱼堡苎f塑二量!!!!一第一章绪论1.1课题的目的及意义在工业、农业、交通运输、国防军事设施以及日常生活巾广泛地应用着电机传动。
(完整word版)异步电动机直接转矩控制系统仿真

现代电力传动及其自动化—课程作业异步电动机直接转矩控制系统仿真1、直接转矩控制系统的基本思想直接转矩控制系统简称 DTC ( Direct Torque Control) 系统,在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,因而得名。
直接转矩控制是标量控制。
它借助于逆变器提供的电压空间矢量,直接对异步电动机的转矩和定子磁链进行二位控制,也称为砰-砰(bang-bang )控制。
三相异步电动机电磁转矩表达式为:))()((m e t t K T r s ΨΨ⨯=)(sin m t K r s θψψ= (1.1)r s ψψ、分别为定子、转子磁链的模值,)(t θ为定子、转子磁链之间的夹角,称为磁通角。
对式(1.1)分析,电磁转矩决定于定子磁链和转子磁链的矢量积,即决定于两种幅值和其间的空间电角度。
若r s ψψ、 是常数,改变转矩角可改变转矩。
而且Ψr 的变化总是滞后于Ψs 的变化。
但是在动态过程中,由于控制的响应时间比转子的时间常数小得多,在短暂的过程中,就可以认为Ψr 不变。
可见只要通过控制保持Ψs 的幅值不变,就可以通过调节转矩角来改变和控制电磁转矩,这是直接转矩控制的基本原理。
图1.1 直接转矩控制系统原理图ω在定子两相静止坐标系下,根据磁链给定值与异步电机的实际磁链观测值相比较得到磁链误差,进而确定磁链的调节方向,根据给定的电磁转矩值与异步电机的实际电磁转矩观测值相比较得到转矩误差,进而确定转矩的调节方向,然后根据定子磁链信号、转矩信号以及定子磁链所在位置确定选择合适的电压空间矢量,从而确定三相电压源逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩值。
由图1.1得直接转矩控制系统仿真结构框图,如图1.2所示。
图1.2 直接转矩控制系统仿真结构框图2、单元模块说明2.1 定子电压与定子电流的三二变换三相/两相变换矩阵如式(2.1),其仿真结构框图如图2.1所示。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=2323212113223c(2.1)图2.1 三相/两相变换矩阵仿真结构框图2.2 磁链估算模型经计算得定子磁链计算公式为(2.2)(2.3)(2.4),结构框图如图2.2、2.3所示。
05 异步电机直接转矩控制(DTC)系统仿真实验
电气与信息工程学院 2019年6月
教学内容: 1. 直接转矩控制原理分析 2. 仿真实验模型的搭建 3. 仿真实验结果的分析
1. 直接转矩控制原理分析
基本直接转矩控制系统
1. 直接转矩控制原理分析
直接转矩控制系统原理结构图
1. 直接转矩控制原理分析
Байду номын сангаас
2. 仿真实验模型的搭建
3. 仿真实验结果的分析
空载起动和加载过程的转速(上)、电磁转矩(中)、定子磁链(下) 7
3. 仿真实验结果的分析
转速(上)、电磁转矩(中)、定子磁链(下)的局部放大图 8
课后练习
将DTC系统与VC系统的仿真结果作比较,进一步地分析、 总结出两种控制系统的性能特点。
谢 谢!
异步电动机直接转矩控制系统的仿真设计
一、绪论1、电机调速技术的发展概况电动机作为把电能转换为机械能的主要设备,在工农业生产、国防、科技及社会生活等各个领域发挥着重要的作用。
根据采用电流制式不同,电动机分为直流电动机和交流电动机两大类。
历史上最早出现的是直流电动机,并且由于直流电动机转速的调节性能和转矩的控制性能比较理想,直流传动系统一直在变速传动系统中占主导地位。
但是由于直流电动机本身结构上具有的机械换向器和电刷而使这种传动存在如下缺点:①、直流电机的机械换向器由很多铜片组成,铜片之间有云母片隔离绝缘,因此制造工艺复杂,费时费料,增加了直流电机的成本。
②、换向器的换向能力限制了直流电机的容量和速度。
③、电刷火花和环火限制了直流电机的安装环境,易燃、易爆、多尘以及环境恶劣的地方不能使用直流电机。
④、直流电机的大部分功率(除励磁以外)都是通过换向器流入电枢的,转子发热多,电机效率低。
⑤、换向器和电刷易于磨损,需要经常更换。
这样就降低了系统的可靠性,增加了维修和保养的工作量。
虽然存在以上的缺点,但是在19世纪80年代以前直流传动是唯一的传动方式。
1885年随着交流鼠笼型异步电动机问世,虽然控制比较复杂,但其结构简单、成本低、安装环境要求低,适于易燃、易爆、多尘的条件。
尤其是在大容量、高转速应用领域,备受人们青睐。
改变异步电动机转速有以下三种方法:①、改变电机本身的参数,极对数来调速,由于制造工艺和本身结构所限一般情况下只有两三种极对数变换,不能做到连续的调速,调速范围有限。
②、改变定子电压(改变电源电压或定子串阻抗),或绕线型电动机转子串电阻,或带转差离合器地异步电机调节励磁电流都可实现变转差率调速。
但是电机地损耗与转差率s成比例地增大,效率随转速的降低而讲的,山于电机在高转差低转速卜运行特性恶化,使实际可行地调速范围受到限制。
③、连续地改变电源频率,虽然可以十分理想地实现交流电动机地无级调速,但这要有一套变频电源,在60年代大功率半导体变频装置问世之前,代价很大。
基于MATLAB的异步电机直接转矩控制系统的建模与仿真

s ( t ) = us ( t ) dt
( 1)
式 ( 1)表示定子磁链空间矢量与定子电压空间矢 量之间为积分关系 (见图 2)。
图 2中, S1 ~ S6 为正六边形的 6条边。当磁 链空间矢量 s ( t)在如图 2所示的位置时, 如果 逆变器加到定子上的电压空间矢量为 u1, 根据式 ( 1), 定子磁链空间矢量的顶点将沿 S1 边朝 u1 所 作用的方向运动; 当 s ( t) 沿边 S1 运动至 S1 与 S2的交点时, 如果给出电压空 间矢量 u2 , 则定子
- 1W b时, 比较器输出 1, 否则比较器输出不变。 Relay4为转矩滞环比较器, 其输入为由速度调节
器输出的转矩给定值 T g 和从电机模型输出的转 矩观测值 T e, 输出为转矩的开关信号。当 T e - T g
T 时, R elay4模块输出 1, 表示应减小转矩; 当 T e - T g - T 时, 输出为 0, 表示应增加转矩; 当
块通过建立磁链开关信号与逆变器开关信号的对
应关系得到相应的电压空间矢量, 实现六边形磁
链轨迹 (见图 2)。磁链 在 u1 的 作用下 沿 S1 移 动, 当 c达到 - 1W b 时, R e lay3输出 0, 选择 u2 使磁链沿 S2 移动。依次类推, 实现了六边形磁链 轨迹。
逆变器模块: 采用 S 函数编写由输入的开关
(T
e
-
TL
)
( 4)
图 4中各模块分述如下。
磁链模型: 采用参数较少、计算简单的 u-i 模
型, 用 S 函数编写。
图 5 异步电机的仿真模型
Is
- RsLr
rL2m
R rLm
rLmL r
Is
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代电力传动及其自动化
—课程作业
异步电动机直接转矩控制系统仿真
1、直接转矩控制系统的基本思想
直接转矩控制系统简称 DTC ( Direct Torque Control) 系统,在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,因而得名。
直接转矩控制是标量控制。
它借助于逆变器提供的电压空间矢量,直接对异步电动机的转矩和定子磁链进行二位控制,也称为砰-砰(bang-bang )控制。
三相异步电动机电磁转矩表达式为:
))()((m e t t K T r s ΨΨ⨯=
)(sin m t K r s θψψ=
r s ψψ、分别为定子、转子磁链的模值,)(t θ为定子、转子磁链之间的夹角,
称为磁通角。
对式()分析,电磁转矩决定于定子磁链和转子磁链的矢量积,即决定于两种幅值和其间的空间电角度。
若r s ψψ、 是常数,改变转矩角可改变转矩。
而且Ψr 的变化总是滞后于Ψs 的变化。
但是在动态过程中,由于控制的响应时间比转子的时间常数小得多,在短暂的过程中,就可以认为Ψr 不变。
可见只要通过控制保持Ψs 的幅值不变,就可以通过调节转矩角来改变和控制电磁转矩,这是直接转矩控制的基本原理。
图 直接转矩控制系统原理图
ω
在定子两相静止坐标系下,根据磁链给定值与异步电机的实际磁链观测值相比较得到磁链误差,进而确定磁链的调节方向,根据给定的电磁转矩值与异步电机的实际电磁转矩观测值相比较得到转矩误差,进而确定转矩的调节方向,然后根据定子磁链信号、转矩信号以及定子磁链所在位置确定选择合适的电压空间矢量,从而确定三相电压源逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩值。
由图得直接转矩控制系统仿真结构框图,如图所示。
图直接转矩控制系统仿真结构框图
2、单元模块说明
定子电压与定子电流的三二变换
三相/两相变换矩阵如式(),其仿真结构框图如图所示。
⎥
⎥⎥⎥⎦⎤
⎢⎢⎢
⎢⎣⎡-
-
-=23230212113223c ()
图 三相/两相变换矩阵仿真结构框图
磁链估算模型
经计算得定子磁链计算公式为()()(),结构框图如图、所示。
dt
i R u s s s s
⎰-=)(αααψ ()
dt i R u s s s s ⎰-=)(β
ββψ ()
图 定子磁链模型的结构框图
22βαψψψs s s += ()
图 定子磁链幅值计算模型
转矩估算模型
静止两相坐标系下的电磁转矩表达式为(),仿真结构框图如图所示。
)(βααβψψs s s s p e i i n T -= ()
图 转矩模型的结构框图
磁链给定值的控制
仿真中加入了一个S 函数,其输入是转速的给定值,而其输出则是磁链的给定值,当转速给定值在-3400到3400之间时,磁链给定值为,当转速给定值为其他值时,根据函数给出相应的磁链给定值。
当转速给定值大于3400时,磁链的给定值会减小,相当于是弱磁升速。
使得电机能够达到的最高转速进一步提升,大概能够达到5000r/min 。
转矩给定值的控制(转速调节器)
比例积分(PI )速度调节器的数学模型如下:
*s ψ= -3400<*n <3400
4600
)8000(2.1**n s
-=ψ *
n >3400
4600
)8000(2.1**n s
+=
ψ *
n <-3400
⎰+=dt t e k t e k t u i p )()()(
其中,p k 为比例增益系数,i k 为积分增益系数,)(t e 为该时刻输入的速度偏差值,)(t u 为输出的给定转矩值。
采用积分作用的主要原因是消除稳态误差,但由于积分作用加强将产生过大的超调,引起系统振荡,为避免产生超调,提高转速调节器的性能可采用积分分离式PI 调节器。
其数学模型如下:
⎰+=dt t e qk t e k t u i p )()()(
其中q 可以表示为:
其中,0e 为需要加入积分作用时刻的速度给定值与实际反馈值间的误差限定值。
图 积分分离式控制器的仿真结构图
磁链调节器
对磁链值进行两点式控制,使之与给定值相比较,通过磁链调节器给出所希望的磁链调节开关信号。
1 0)(e t e ≤
0)(e t e ≥
=q
-1
1
0 T
∆
-T∆
图磁链两点式控制
转矩调节器
转矩调节器选择用双滞环控制器,对转矩进行三点式调节,其输入为
e
T
∆,输出值为转矩控制信号-1、0、1。
图转矩三点式控制
扇区判断
对磁链的计算不仅包括幅值,还包括相位角,使用相位角判断磁链所在的扇区,并将结果送到电压矢量选择(查表)模块。
360°被划分成六个扇区)1(θ、)2(θ、)3(θ、)4(θ、)5(θ、)6(θ,每个扇区宽度为60o,本仿真中所采用的扇区划分方法如下,即:
—Q
T
T
∆
*
e
T
e
T
*
s
ψ-
+
Q
ψ
ψ
∆
s
ψ
-ψε0 ψε
图示如下:
图 磁链扇区分段图一
从αβ坐标轴的角度来看此扇区分段图,整个坐标轴平面被分成了六等分: 当-30°<θ<=30°时,处于扇区1 当30°<θ<=90°时,处于扇区2 当90°<θ<=150°时,处于扇区3 当150°<θ<=210°时,处于扇区4 当210°<θ<=270°时,处于扇区5 当270°<θ<=330°时,处于扇区6
u 6
3u
β
3
3>αβψψ
位于扇区五 3
333<<-αβψψ 位于扇区四 当0<αψ时,若
3
3-<αβψψ 位于扇区三 3
3>αβψψ
位于扇区二 3
333<<-αβψψ 位于扇区一 当0>αψ时,若
3
3
-<αβψψ 位于扇区六
以αβ坐标轴画出的圆形扇区分段图如下:
图 磁链扇区分段图二
逆变器开关电压选择
经过分析得如表所示的开关信号选择表一。
表 开关信号选择表一
与磁链调节器的输出Q ψ、转矩调节器的输出Q T 结合起来,开关状态表形成下面的表格:
3、仿真结果及分析
直接转矩控制系统整体仿真图
经过以上分析,建立直接转矩控制系统的整体仿真模型如下:
图直接转矩控制系统的整体仿真图
仿真图及结果分析
图异步电动机is,wm,Tm 的仿真结果
图实际转速波形
可以看出,由于积分分离式控制器的作用,转速基本上是无静差的。
通过调节转速PI 调节器的比例与积分参数,使得转速上升速度较快且基本上无超调。
当1s加负载后转速有所下降但很快跟随到给定。
当给定速度下降时,系统也能很快的跟随,虽然有一个小的超调但在很短的时间内就又跟随给定,结果表明应用直接转矩控制技术后系统的静动态性能较好。
图估算转矩波形与给定转矩波形
将图中两个仿真结果进行比较可知,电机的启动转矩较大,启动完成后,电机的估算转矩始终与给定转矩保持近似平衡。
同时采用三点式转矩调节器,提高了系统的动态响应。
图磁链估算值与磁链给定值
由图所得磁链仿真图可知,磁链估算值能够始终跟随给定值的变化,维持恒定。
图磁链轨迹图
定子磁链的幅值由0开始增长,很快就达到了给定值。
在电机启动阶段,由于速度低以及定子电阻压降的影响,使得磁链轨迹向中心偏,有向中心运动的趋势,但随着转速的升高,定子电阻压降的影响很小甚至可以忽略,故磁链的轨迹近似圆形。