面向智能汽车的测试技术
汽车智能化功能集成测试

汽车智能化功能集成测试概述随着科技的不断进步和应用的发展,智能化功能的集成在汽车行业中变得越来越重要。
汽车智能化功能集成测试是确保汽车智能化功能的可靠性和稳定性的关键过程。
本文将深入探讨汽车智能化功能集成测试的重要性、测试的目的和方法,并介绍一些常见的智能化功能测试方法。
汽车智能化功能集成测试的重要性汽车智能化功能集成测试是确保汽车智能化系统正常工作的重要环节。
在现代汽车中,智能化功能已经渗透到多个方面,如导航系统、自动驾驶、语音识别、车联网等。
这些智能化功能的正常工作对于驾驶员的安全和行车体验至关重要。
因此,进行全面的集成测试是确保这些功能正常工作的基础。
汽车智能化功能集成测试的主要目的是确保不同的智能化功能能够在同一时间和空间内正常协同工作。
集成测试可以发现不同模块之间的兼容性问题、性能问题和安全问题,并帮助开发人员及时进行修复和优化。
合格的集成测试可以提供高质量、可靠和稳定的智能化汽车产品。
汽车智能化功能集成测试方法功能测试功能测试是集成测试中最基本也是最重要的环节之一,它确保智能化功能的各个模块和组件都能正常工作。
在进行功能测试时,需要根据需求和设计文档编写测试用例,并对每个测试用例进行执行和验证。
常见的功能测试包括:•导航功能测试:测试导航系统的定位准确性、导航路线规划和导航指示的正确性。
•语音识别功能测试:测试语音识别系统的准确性和响应速度。
•自动驾驶功能测试:测试自动驾驶系统的识别能力、规划能力和执行能力。
兼容性测试兼容性测试是测试不同智能化功能模块之间的兼容性和协同工作能力。
在进行兼容性测试时,需要模拟不同的场景和情况,并观察各模块之间的相互作用。
常见的兼容性测试包括:•车载设备与手机的兼容性测试:测试汽车中的智能设备与手机的连接和交互能力。
•导航系统与语音识别系统的兼容性测试:测试导航系统与语音识别系统的协同工作能力。
性能测试性能测试是测试智能化功能在不同负载和压力下的表现和性能。
第八章 智能网联汽车测试与评价技术 电子课件
2.1相似第一定理
相互相似的物理现象必须遵循相同的客观规律。如果定律可以用方程来表示,那么物
理方程必须是相同的。如果这两种流动现象在机械上相似,那么空间中相应的点和相应的
瞬时物理量彼此成一定比例。这些相似参数的选择不能是任意的,而是符合一定的规律并
相互制约。此外,物理现象中的相似性准则在不同的时间和不同的空间位置具有不同的值,
评价则是对一个人或者事进行判断,分析后的结果。构建智能驾驶测试与评价体系,可以全
可以全面系统的评价智能汽车的性能,为研发与生产提供方向。
面系统的评价智能汽车的性能,为研发与生产提供方向。
测评的分类
在进行测试和评价时,需要研究测评目的。可以根据测评对象对汽车的测评目的进行分
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备和合理的实验方法进
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备和合理的实验方法进
和合理的实验方法进行信号分析和数据处理。
行信号分析和数据处理。评价则是对一个人或者事进行判断,分析后的结果。构建智能驾驶测试与评价体系,
场对汽车性能和功能的要求,满足大众汽车对汽车的多样化需求,研发阶段的测试和评估
范围非常广泛。为了适应新技术,特别是当前的汽车智能化和自动化,测试和评估方法需
要不断更新。
8.1.2 通用测试原理
1.测试方案设计方法
常见的试验方案设计方法包括单因素试验方案设计、双因素试验方案设计、疲劳试验
方案设计和寿命试验方案设计等。
验证,提早发现算法中问题和错误,在开发的过程中不断验证。
智能网联汽车(V2X)测试的实践与思考
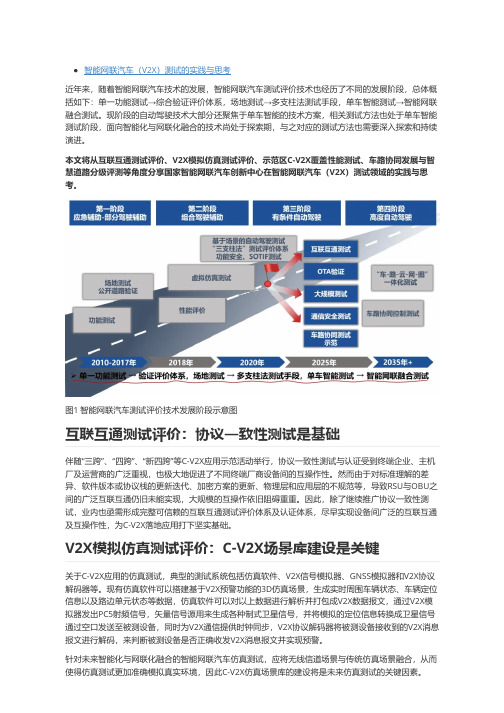
智能网联汽车(V2X)测试的实践与思考近年来,随着智能网联汽车技术的发展,智能网联汽车测试评价技术也经历了不同的发展阶段,总体概括如下:单一功能测试→综合验证评价体系,场地测试→多支柱法测试手段,单车智能测试→智能网联融合测试。
现阶段的自动驾驶技术大部分还聚焦于单车智能的技术方案,相关测试方法也处于单车智能测试阶段,面向智能化与网联化融合的技术尚处于探索期,与之对应的测试方法也需要深入探索和持续演进。
本文将从互联互通测试评价、V2X模拟仿真测试评价、示范区C-V2X覆盖性能测试、车路协同发展与智慧道路分级评测等角度分享国家智能网联汽车创新中心在智能网联汽车(V2X)测试领域的实践与思考。
图1 智能网联汽车测试评价技术发展阶段示意图互联互通测试评价:协议一致性测试是基础伴随“三跨”、“四跨”、“新四跨”等C-V2X应用示范活动举行,协议一致性测试与认证受到终端企业、主机厂及运营商的广泛重视,也极大地促进了不同终端厂商设备间的互操作性。
然而由于对标准理解的差异、软件版本或协议栈的更新迭代、加密方案的更新、物理层和应用层的不规范等,导致RSU与OBU之间的广泛互联互通仍旧未能实现,大规模的互操作依旧阻碍重重。
因此,除了继续推广协议一致性测试,业内也亟需形成完整可信赖的互联互通测试评价体系及认证体系,尽早实现设备间广泛的互联互通及互操作性,为C-V2X落地应用打下坚实基础。
V2X模拟仿真测试评价:C-V2X场景库建设是关键关于C-V2X应用的仿真测试,典型的测试系统包括仿真软件、V2X信号模拟器、GNSS模拟器和V2X协议解码器等。
现有仿真软件可以搭建基于V2X预警功能的3D仿真场景,生成实时周围车辆状态、车辆定位信息以及路边单元状态等数据,仿真软件可以对以上数据进行解析并打包成V2X数据报文,通过V2X模拟器发出PC5射频信号,矢量信号源用来生成各种制式卫星信号,并将模拟的定位信息转换成卫星信号通过空口发送至被测设备,同时为V2X通信提供时钟同步,V2X协议解码器将被测设备接收到的V2X消息报文进行解码,来判断被测设备是否正确收发V2X消息报文并实现预警。
智能网联汽车仿真测试方法

统的测试方法主要是道路测试和场地测试,但是都面 实传感器的反馈信号,使传感器能在实验室内被激活;
临测试成本高、测试工况少、测试周期长等难题,在开 控制器中包含了智能网联汽车不同系统的不同算法,
[6-7]
发时间、成本、灵活性方面满足不了智能网联汽车复杂 可以在仿真环境中进行验证 。
功能的开发验证需求。文章将真实驾驶员、真实传感 器、真实控制器在虚拟仿真环境下深度集成,以丰富的 测试手段、高度逼真的测试场景、高精度的模拟测试设
智能网联汽车是指搭载先进的车载传感器、控制 驶模拟系统模拟了真实车辆的运动,可以进行驾驶员
器、执行器等装置,并融合现代通信与网络技术的新一 主观评价研究;车辆模拟系统模拟了真实车辆的动力
代汽车。由于智能汽车涉及更加复杂的功能和应用,如 学关系,可以进行车辆的性能研究;环境模拟系统模拟
[1-2]
何测试和验证其功能和性能是亟需解决的问题 。传 了真实环境中的各类因素;传感器模拟系统模拟了真
轮胎模型、动力传动系统模型和空气动力学模型等。车 计算数据传递给环境模拟系统,使其中的环境随着车
辆模型在仿真测试中需要快速的计算,并将计算出的 辆模型的运动而变化,另一方面车辆模型计算数据传
车辆响应结果发送到其它控制器中进行相应的计算和 递给驾驶模拟系统,使其按照车辆模型的计算情况进
决策。为了实现快速计算,实时系统是必须要使用到的 行相应的运动。
车辆动力学模型
油门踏板行程 制动踏板行程 转向盘转角 ……
!"# $%&'()'%
实时机
!"# $%&'()'%
主车位移 主车速度 主车加速度 ……
环境模拟系统
图 智能网联汽车仿真测试车辆模型处理平台
面向智能驾驶测试的仿真场景构建技术综述
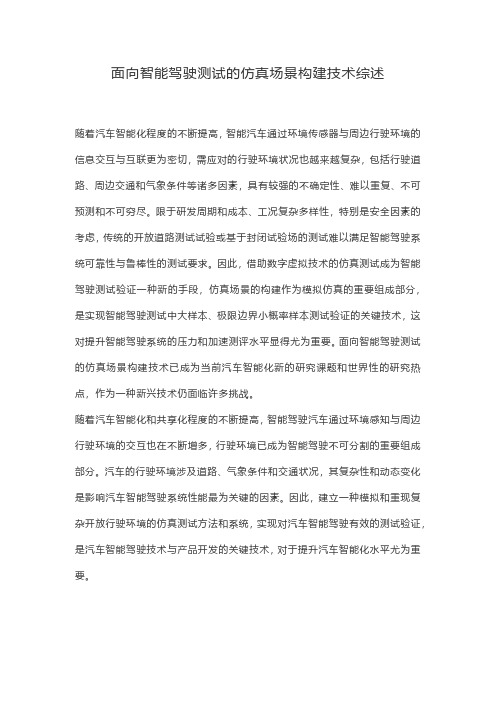
面向智能驾驶测试的仿真场景构建技术综述随着汽车智能化程度的不断提高,智能汽车通过环境传感器与周边行驶环境的信息交互与互联更为密切,需应对的行驶环境状况也越来越复杂,包括行驶道路、周边交通和气象条件等诸多因素,具有较强的不确定性、难以重复、不可预测和不可穷尽。
限于研发周期和成本、工况复杂多样性,特别是安全因素的考虑,传统的开放道路测试试验或基于封闭试验场的测试难以满足智能驾驶系统可靠性与鲁棒性的测试要求。
因此,借助数字虚拟技术的仿真测试成为智能驾驶测试验证一种新的手段,仿真场景的构建作为模拟仿真的重要组成部分,是实现智能驾驶测试中大样本、极限边界小概率样本测试验证的关键技术,这对提升智能驾驶系统的压力和加速测评水平显得尤为重要。
面向智能驾驶测试的仿真场景构建技术已成为当前汽车智能化新的研究课题和世界性的研究热点,作为一种新兴技术仍面临许多挑战。
随着汽车智能化和共享化程度的不断提高,智能驾驶汽车通过环境感知与周边行驶环境的交互也在不断增多,行驶环境已成为智能驾驶不可分割的重要组成部分。
汽车的行驶环境涉及道路、气象条件和交通状况,其复杂性和动态变化是影响汽车智能驾驶系统性能最为关键的因素。
因此,建立一种模拟和重现复杂开放行驶环境的仿真测试方法和系统,实现对汽车智能驾驶有效的测试验证,是汽车智能驾驶技术与产品开发的关键技术,对于提升汽车智能化水平尤为重要。
汽车行驶环境包括行驶道路、周边交通和气象条件等诸多因素,其高逼真的重现和构建面临诸多挑战。
随着智能驾驶功能的不断增强,汽车需应对的行驶环境越来越复杂,环境高度的不确定性、难以重复、不可预测和不可穷尽等特征使得有限的场地和道路测试远远无法复制、重现或穷举行驶环境对智能驾驶系统的影响。
一方面,限于研发周期和成本,现有的封闭场地测试和开放道路测试不仅周期长、成本高,无法满足对系统数十亿公里行程的大样本和可靠性测试要求。
另一方面,与汽车行驶安全测试密切相关的极限危险工况属于小样本、小概率事件,开放的道路测试往往难以复制,测试安全也无法保障。
智能网联汽车网络安全测试

期望未来智能网联汽车能够实现从云端到终端的全方位网 络安全防护,确保车辆在各种网络环境下的安全性。
跨界合作
希望通过跨界合作,整合产业链各环节的资源和能力,共 同打造智能网联汽车网络安全的产业生态,推动行业持续 创新和发展。
THANKS
感谢观看
评估标准不同
网络安全测试以发现的安 全漏洞和风险为评估依据 ,而传统测试则基于功能 和性能的指标。
03
CATALOGUE
智能网联汽车网络安全测试方法
渗透测试
模拟攻击
渗透测试通过模拟恶意攻击者的 行为,对智能网联汽车的网络系 统进行攻击,以验证系统的安全
性能。
识别漏洞
通过渗透测试,可以识别出智能 网联汽车网络系统中可能存在的
测试目标和期望结果
测试目标
智能网联汽车网络安全测试的目标包括:评估车辆的网络抗攻击能力,检测可 能存在的安全漏洞,验证安全防护机制的有效性,以及提升整体网络安全水平 。
期望结果
通过网络安全测试,期望能够发现并及时修复潜在的安全隐患,减少或避免网 络安全事故的发生。同时,测试结果可为智能网联汽车的网络安全设计和开发 提供有力支持,推动行业网络安全标准的制定和完善。
网络安全测试的重要性
风险与挑战
随着智能网联汽车的普及,网络安全问题日益凸显。未经授 权的访问、恶意攻击和数据泄露等网络安全威胁可能对车辆 控制系统、乘客隐私以及整个交通系统造成严重风险。
测试的必要性
为确保智能网联汽车在网络环境下的安全性和可靠性,必须 进行全面的网络安全测试。这类测试有助于发现潜在的安全 隐患,及时采取防护措施,确保车辆和乘客的安全。
多层防御机制
结合防火墙、入侵检测系统(IDS) 、访问控制等多种技术,构建多层防 御体系。
《智能网联汽车改装与测试技术》毫米波雷达的安装与调试

毫米波雷达的 安装与调试
智能网联汽车改装与测试技术
1 毫米波雷达的工作原理
毫米波雷达简介
毫米波(Millimeter-Wave,MMW)是波长在1mm~10mm之内的电磁波。 频率范围:30 GHz~300 GHz。 性质: 波的频率越高,波长越短,分辨率越高,穿透能力越强,但传输距离较短。 波的频率越低,波长越长,绕射能力越强,传输距离越远。 与其他波的对比: 与微波相比,毫米波具有指向性好、抗干扰能力强和探测性能好的特点。 与红外波相比,毫米波在大气中衰减小,对烟雾和灰尘具有更好的穿透性,受大气影响小。
调频式连续毫米波雷达
脉冲方式测量原理简单,但由于受技术、元器件等方面的 影响,实际应用中很难实现。目前,大多数车载毫米波雷达都 采用调频式连续毫米波雷达。
智能网联汽车改装与测试技术
2 常用毫米波雷达种类
按探测z 测距范围/m 最大视角/(°) 测距精度/m 方位精度/(°) 测速精度/(ms)
毫米波雷达短程探测和远程探测对比示意图 智能网联汽车改装与测试技术
ICV Intelligent & Connected Vehicle
谢谢观看
智能网联汽车改装与测试技术
短程毫米波雷达 24 4
0.15~60 ±80 ±0.02 ±1 0.1
中程毫米波雷达 76~77 0.6 1~100 ±40 ±0.1 ±0.5 0.1
远程毫米波雷达 77~81 0.6 10~250 ±15 ±0.1 ±0.1 0.1
短程、中程和远程毫米波雷达的技术指标
按探测距离可分为: 近距离(SRR, <60m)
毫米波雷达 中距离(MRR,100m左右)
智能网联汽车信息安全测试
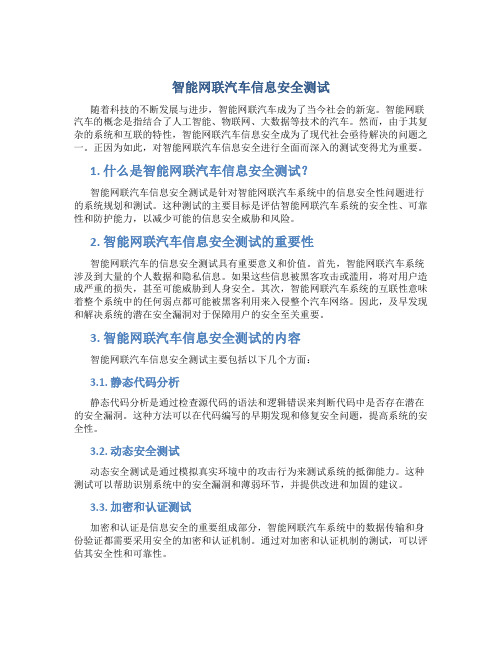
智能网联汽车信息安全测试随着科技的不断发展与进步,智能网联汽车成为了当今社会的新宠。
智能网联汽车的概念是指结合了人工智能、物联网、大数据等技术的汽车。
然而,由于其复杂的系统和互联的特性,智能网联汽车信息安全成为了现代社会亟待解决的问题之一。
正因为如此,对智能网联汽车信息安全进行全面而深入的测试变得尤为重要。
1. 什么是智能网联汽车信息安全测试?智能网联汽车信息安全测试是针对智能网联汽车系统中的信息安全性问题进行的系统规划和测试。
这种测试的主要目标是评估智能网联汽车系统的安全性、可靠性和防护能力,以减少可能的信息安全威胁和风险。
2. 智能网联汽车信息安全测试的重要性智能网联汽车的信息安全测试具有重要意义和价值。
首先,智能网联汽车系统涉及到大量的个人数据和隐私信息。
如果这些信息被黑客攻击或滥用,将对用户造成严重的损失,甚至可能威胁到人身安全。
其次,智能网联汽车系统的互联性意味着整个系统中的任何弱点都可能被黑客利用来入侵整个汽车网络。
因此,及早发现和解决系统的潜在安全漏洞对于保障用户的安全至关重要。
3. 智能网联汽车信息安全测试的内容智能网联汽车信息安全测试主要包括以下几个方面:3.1. 静态代码分析静态代码分析是通过检查源代码的语法和逻辑错误来判断代码中是否存在潜在的安全漏洞。
这种方法可以在代码编写的早期发现和修复安全问题,提高系统的安全性。
3.2. 动态安全测试动态安全测试是通过模拟真实环境中的攻击行为来测试系统的抵御能力。
这种测试可以帮助识别系统中的安全漏洞和薄弱环节,并提供改进和加固的建议。
3.3. 加密和认证测试加密和认证是信息安全的重要组成部分,智能网联汽车系统中的数据传输和身份验证都需要采用安全的加密和认证机制。
通过对加密和认证机制的测试,可以评估其安全性和可靠性。
3.4. 外部接口测试智能网联汽车系统通常与外部设备和平台进行数据交换和通信。
外部接口测试可以确保系统与外部设备的正常通信,并验证传输数据的完整性和准确性。
车载自动化测试方案

车载自动化测试方案随着科技的不断发展,智能汽车的出现让人们的出行更加方便、舒适、安全。
然而,任何一项技术的发展都是需要经过层层测试和验证的。
对于智能汽车来说也是一样,自动化汽车测试已经成为了汽车制造业的关键技术之一。
而其中的车载自动化测试方案更是被广泛地采用。
本文将就此话题进行探讨。
一、汽车自动化测试的意义汽车自动化测试是一种自动进行测试、验证和诊断的技术,具有高效、精确、安全、便捷等优点。
在汽车产业中,汽车自动化测试工具和技术已被广泛应用于软件开发、硬件测试、系统集成等方面,特别是在智能汽车领域,自动驾驶技术的成熟离不开大量的自动化测试。
汽车自动化测试的意义在于:提高测试效率:测试工程师无需手动执行重复性测试,只需编写测试脚本并运行即可,大大提高了测试效率和测试覆盖度。
保证测试精度:由于测试脚本中已经预先定义了测试用例,测试工程师不需要人工干预,所以测试精度和准确性更高。
缩短测试周期:不仅能够提高测试效率、测试质量,还能够缩短测试周期。
自动化测试工具能够在较短时间内(如每日或每周)运行多次测试,确保新版本发布前测试覆盖度充分。
二、车载自动化测试的应用场景车载自动化测试主要应用于汽车硬件测试、软件测试、驾驶辅助系统测试、底盘控制系统测试、车身安全系统测试等多个领域,其中以以下应用场景为主:1. 车联网测试车载自动化测试可以分析和测试车辆与网络设备之间的通信协议、实现车机与智能手机的互联互通,以及测试车载终端的智能化功能,保证车联网系统的高可用性和稳定性。
2. 自动驾驶测试自动驾驶技术是未来智能汽车的核心功能之一,保证其安全性、可靠性和稳定性对测试工作提出了更高的要求。
车载自动化测试可以模拟各种不同的路况和场景,对自动驾驶系统进行测试和验证。
3. 底盘控制系统测试底盘控制系统是车辆中最关键的系统之一,涉及到制动、悬挂和转向等方面的控制。
车载自动化测试可以对底盘控制系统的动态性能进行测试,在保障车辆行驶安全的前提下优化车辆性能表现和稳定性。
面向汽车的MIMO OTA测试技术

专题:移动通信(5G )测试面向汽车的MIMO OTA 测试技术李雷1,魏贵明1,姜国凯2,冯家煦2,吴翔1(1.中国信息通信研究院,北京 100191;2.中国汽车技术研究中心有限公司,天津 300300)摘 要:汽车智能网联是当前交通产业发展的主要方向之一。
通过汽车与周围车辆、行人、交通设施、蜂窝网络进行信息交互,提升交通网决策管理智能化水平,改善道路安全与效率。
如何定量精确地评估整车通信性能是业界关注的热点问题,然而目前尚缺少成熟的解决方案,特别是面向整车产品。
主要研究了基于多探头吸波暗室(multi-probe anechoic chamber ,MPAC )的汽车空口测量系统的搭建方法,并针对整车空口测试提出了一种低成本解决方案,可以在信道模拟器数字通路受限的情况下,通过数字变换,成倍拓展测试区域。
数字仿真结果表明,基于此方案所构造的测试区域,其空间相关性、时间相关性均满足相关标准要求。
关键词:汽车空口测试;多探头吸波暗室;空间相关性;时间相关性 中图分类号:TN929.5 文献标识码:Adoi : 10.11959/j.issn.1000−0801.2021040MIMO OTA performance testing of vehiclesLI Lei 1, WEI Guiming 1, JIANG Guokai 2, FENG Jiaxu 2, WU Xiang 11. China Academy of Information and Communications Technology, Beijing 100191, China2. China Automotive Technology and Research Center Co., Ltd., Tianjin 300300, ChinaAbstract: Intelligent traffic system is one of promising technologies for traffic industry. Based on communication among cars, pedestrian, traffic infrastructure and cellular networks, it’s able to significantly promote on road safety and efficiency by making proper traffic instructions. How to precisely evaluate the communication performance of a whole vehicle become a hot-topic in the field. Unfortunately, there is still no solution about the setup and procedures for the OTA testing. A low-cost solution was proposed by reconstructing channel models and optimizing the existing testing system framework that referred to as multi-probe anechoic chamber. The proposed method was able to mul-tiple the test area with limited channel emulator RF channels by introducing a low-cost digital converter. Numerical simulations indicate that the proposed method has the ability to reproduce spatial and temporal correlation features of the target channel model, which is coherent with related standards’ requirements.Key words: OTA testing for vehicles, multi-probe anechoic chamber, spatial correlation, temporal correlation1 引言多输入多输出(multi-input multi-output ,MIMO )通过在收发两端配置多路天线,基于合适的空时编码技术,可以在相同的时频资源上传输多流数据,从而成倍地提升系统的频谱效率,收稿日期:2020−07−29;修回日期:2021−02−18 通信作者:魏贵明,*******************.cn·33·电信科学 2021年第2期是长期演进(long term evolution,LTE)和新空口(new radio,NR)接入网络的核心物理层技术之一。
第7章智能网联汽车测试与评价技术

二、测试要求
在测试的开始,需要明确若干通用要求,包括测试车辆通用要求、测试 场景通用要求、测试过程通用要求、测试仪器及设备通用要求等。并且需要 明确测试的通过条件,该通过条件定义了一系列系统理想功能测试输出的行 为标准。
除自动紧急制动和人工操作接管的测试场景外,所有测试都应在测试车 辆自动驾驶状态完成,并满足以下通过条件: (1)测试车辆应按照规定进行每个场景的测试,并满足其要求; (2)测试车辆应在一次测试申请中通过所有规定的必选项目和选测项目测试; (3)测试期间不应对软硬件进行任何变更调整; (4)除避险工况外,自动驾驶测试车辆不应违反交通规则;
图7-5 性能测试总体架构图
二、网络性能测试
三、测试实例
其包含的子测试场景为“限速标志识别及响应”,测试场景描述为: 测试道路为至少包含一条车道的长直道,并于该路段设置限速标志牌,测试 车辆以高于限速标志牌的车速驶向该标志牌,如图7-4所示。
测试方法描述为:测试车辆在自动驾驶模式下,在距离限速标志100m 前达到限速标志所示速度的1.2倍,并匀速沿车道中间驶向限速标志。
一、客户端性能测试
(二)系统疲劳强度测试
智能网联汽车系统可靠性的表现方式之一是智能网联汽车系统的疲劳 强度耐受性。不难理解,在冗长的汽车行驶和系统运行中,智能网联汽车系 统需要能够长时间、持续地执行系统任务,长时间地负载高强度的任务执行。
在系统疲劳强度测试环节,我们同样使用自动化测试的方法(也可手 动编写测试用例执行),对设备处理任务请求进行一定时间的疲劳度测试, 同时监控和获取系统输出指标。我们可以通过动态地更新测试输入、测试时 间的方式,迭代地获得系统的服务提供稳定性时间。
二、网络性能测试
在性能测试中,负载是必不可少的。负载控制器与IUT的通信也是通过 环境实现的,把沟通测试器与IUT、负载控制器与IUT的环境称为测试上下 文,测试器与测试上下文通信的点称为控制观察点(PCOs),测试器与负 载控制器通信的点称为协调点(CPs)。
人工智能技术在新能源汽车检测中的应用

人工智能技术在新能源汽车检测中的应用在如今的社会中,新能源汽车已经成为人们生活中不可或缺的一部分。
为了确保新能源汽车的安全和性能,汽车制造商和技术专家们一直在努力提高新能源汽车的质量和性能。
人工智能技术作为一种新兴技术,正在被广泛应用于新能源汽车的检测领域,以提高检测的准确性和效率。
首先,人工智能技术在新能源汽车检测中发挥着重要作用的领域之一是图像识别。
通过在汽车检测过程中使用摄像头拍摄车辆的各个部位,运用深度学习算法和图像识别技术,可以快速准确地识别出汽车存在的各种问题,如刮擦、凹陷、漏油等。
这种技术不仅可以帮助检测人员在短时间内完成复杂的检测任务,还可以避免人为判断的主观性,提高检测的准确性。
其次,人工智能技术在新能源汽车检测中的另一个重要应用领域是声音识别。
通过在汽车发动机运转时录制发动机声音,并将录制的声音数据与事先建立的模型进行比对,可以及时发现发动机是否存在异常声音。
这种声音识别技术可以帮助检测人员快速定位问题,并提前预警,有效防止发动机由于故障而导致的严重后果。
同时,声音识别技术还可以帮助对新能源汽车的动力系统、制动系统等部件进行全面检测,确保车辆安全可靠。
另外,人工智能技术在新能源汽车检测中还可应用于数据分析和预测。
通过将大量的汽车行驶数据、充电数据、驾驶习惯数据等输入到数据分析模型中,结合机器学习算法,可以对新能源汽车的性能进行全面评估,并预测可能出现的问题。
这种数据驱动的检测方法不仅可以提高检测的准确性和效率,还可以为汽车制造商提供更精准的改进方向,不断优化车辆性能和安全性。
此外,人工智能技术在新能源汽车检测中还可以应用于自动驾驶技术。
通过将车载传感器与人工智能算法结合,可以实现新能源汽车的智能驾驶和自动避障功能,提高车辆的驾驶安全性和舒适性。
这种自动驾驶技术不仅可以降低人为因素对驾驶安全的影响,还可以大大减少交通事故的发生率,提高道路交通的整体流畅度。
总的来说,人工智能技术在新能源汽车检测中的应用,不仅可以提高检测的准确性和效率,还可以实现汽车智能化、自动化的发展。
智能网联汽车测试评价关键技术
智能网联汽车测试评价关键技术智能网联汽车是智能化发展的重要领域之一,其核心是通过互联网和物联网技术,实现车辆与车辆、车辆与基础设施、车辆与用户之间的实时信息交流和协同操作。
为了确保智能网联汽车的稳定性、安全性和效能,需要进行测试评价。
1.软件测试技术:智能网联汽车的核心是软件系统,因此需要进行全面的软件测试。
软件测试主要涉及功能测试、性能测试、安全性测试等各个方面。
功能测试主要验证车辆在不同情况下的各项功能是否正常工作,包括导航、自动泊车、车联网等功能。
性能测试则主要验证车辆在不同速度、路况等条件下的性能表现,包括加速度、制动距离、悬挂系统等性能指标。
安全性测试是智能网联汽车测试评价中最重要的一环,主要验证车辆的信息安全、隐私保护等方面。
2.通信与网络技术:智能网联汽车的核心是车与车、车与基础设施之间的信息交流与协同操作。
因此,通信与网络技术的测试评价非常关键。
通信技术的测试主要包括通信质量、传输速度、数据传输稳定性等方面。
网络技术的测试主要包括网络安全性、网络延迟、网络带宽等方面。
只有确保通信与网络技术的稳定可靠,才能保证智能网联汽车的正常运行。
3.传感器与感知技术:智能网联汽车需要通过传感器实时感知周围环境,包括道路状况、障碍物、行人等。
因此,传感器与感知技术的测试评价非常重要。
传感器的测试主要包括传感器的灵敏度、准确度、稳定性等方面。
感知技术的测试主要评估车辆对周围环境的感知能力,能否准确地识别、跟踪和预测周围物体的行为等。
4.控制与决策技术:智能网联汽车需要通过控制与决策系统来实现自动驾驶、自动泊车、智能交通等功能。
因此,控制与决策技术的测试评价也非常关键。
控制技术的测试主要包括车辆的稳定性、操控性等方面。
决策技术的测试主要评估车辆的智能判断和决策能力,能否根据周围环境和路况做出合理的决策。
5.安全与法规合规性评价:智能网联汽车的安全性和合规性是测试评价的重点。
安全评价主要包括车辆的主动安全和被动安全两个方面。
车载测试技术发展趋势及前景展望
车载测试技术发展趋势及前景展望随着汽车科技的飞速发展,车载测试技术在现代汽车行业中变得越来越重要。
车载测试技术可以对车辆的各个方面进行全面的测试和评估,从而提高驾驶安全性、减少故障率、改善燃油经济性等。
本文将探讨车载测试技术的发展趋势,并展望其前景。
一、无线通信技术在车辆测试中的应用无线通信技术在车辆测试中的应用前景广阔。
传统的车载测试设备通常需要使用有线连接,然而,有线连接不仅存在布线复杂、安装麻烦等问题,而且限制了测试设备的移动性和灵活性。
无线通信技术的出现解决了这些问题。
通过使用无线通信技术,测试设备可以自由地与车辆进行通信,从而实现对车辆各种参数的实时监测和控制。
二、自动驾驶技术对车载测试技术的影响随着自动驾驶技术的快速发展,车载测试技术也面临着新的挑战和机遇。
自动驾驶车辆需要通过各种传感器来感知周围环境,并根据感知结果做出相应的行驶决策。
因此,对这些传感器进行准确的测试和校准成为了关键。
车载测试技术可以提供各种测试手段,从而确保传感器的准确性和稳定性,进而提高自动驾驶系统的可靠性和安全性。
三、数据处理与分析技术在车载测试中的应用车载测试过程中产生的海量数据需要进行高效的处理和分析。
传统的数据处理和分析方法往往需要大量的时间和人力,效率较低。
然而,随着数据处理和分析技术的不断发展,越来越多的智能化算法被应用于车载测试领域。
这些智能化算法可以快速、准确地处理和分析数据,为测试人员提供有力的决策支持,从而提高测试效率和可靠性。
四、虚拟仿真技术在车载测试中的作用虚拟仿真技术在车载测试中的应用不断扩大。
传统的车载测试往往需要使用实际车辆进行测试,并且测试过程费时费力。
而虚拟仿真技术可以通过建立逼真的虚拟环境,模拟各种路况和行为,从而在较短的时间内完成大量的测试工作。
虚拟仿真技术不仅提高了测试效率,而且降低了测试成本,同时还能保证测试的准确性和可靠性。
五、车载测试技术未来的发展趋势未来,随着汽车智能化和网络化的不断深入,车载测试技术将呈现出以下几个发展趋势:1. IoT技术的应用:车载测试设备将与车辆、云端系统等进行全方位的信息交互,实现智能测试、及时监测和故障预警等功能。
智能车辆控制系统的设计与测试
智能车辆控制系统的设计与测试智能车辆控制系统是未来汽车行业发展的大趋势。
它具有自动驾驶、车辆网络、信息娱乐、环保节能等多种功能,是汽车产业技术升级的必然趋势。
设计和测试是智能车辆控制系统的重要环节,本文将对其进行探讨。
一、智能车辆控制系统设计智能车辆控制系统设计是智能汽车制造的重要环节。
项目启动后,需要进行系统设计和需求分析,包括功能模块划分、软硬件结构设计、故障保护、数据采集等。
同时,需要根据不同车型的特点进行设计,确保系统能够稳定运行并满足各项功能要求。
1.功能模块划分智能车辆控制系统的功能模块包括驾驶辅助、自动驾驶、电子底盘等。
其中,驾驶辅助模块包括自动泊车、ACC自适应巡航、车道保持等功能;自动驾驶模块包括自动驾驶高速、自动驾驶城市、紧急避让等功能;电子底盘模块包括自动制动、自动变道、四驱控制等功能。
2.软硬件结构设计智能车辆控制系统由硬件和软件组成。
硬件包括车载传感器、处理器、执行器、通讯模块等;软件包括驾驶控制算法、数据采集与处理、交互界面等。
设计时需要考虑各种因素,如通讯协议、传感器种类和数量、控制器的工作环境等。
3.故障保护设计智能车辆控制系统的安全性至关重要。
在设计时需要考虑系统异常或者故障的情况,并实现故障保护机制。
例如,在传感器失效或者通信断开的情况下,系统应该及时采取措施保证安全行驶。
4.数据采集和处理智能车辆控制系统需要采集车辆感知数据,进行数据处理和分析,从而实现车辆控制。
为了确保系统的准确性和稳定性,需要对数据进行滤波、校验和整合处理。
二、智能车辆控制系统测试智能车辆控制系统测试是智能汽车制造的关键环节。
系统测试涉及到多个方面,包括功能测试、性能测试、可靠性测试等。
测试是保证系统质量的重要手段。
1.功能测试智能车辆控制系统的功能测试是验证系统是否满足需求的重要步骤。
测试人员根据需求规格书和设计文档,对系统进行功能测试,包括自动驾驶测试、车道保持测试、自动泊车测试等。
车载测试技术的最新发展趋势
车载测试技术的最新发展趋势随着汽车科技的飞速发展,车载测试技术作为汽车行业中的重要一环,也在不断创新与进步。
本文将从多个角度,探讨车载测试技术的最新发展趋势。
一、智能化测试技术的兴起随着人工智能和物联网技术的迅猛发展,智能化测试技术在车载测试中的应用愈发广泛。
传统的测试手段主要依赖于人工操作,耗时且容易产生误差。
而智能化测试技术通过无线连接和自动化控制,实现对车辆各项指标的快速、准确测试。
例如,通过与车辆内部系统的连接,可以实时监测并记录汽车的运行状态,进而提高故障诊断的效率。
二、全面测试的需求增加随着电动汽车等新能源汽车的出现,车辆的测试需求也日益增加。
传统的测试方法往往只注重车辆的性能和安全性,而对新能源汽车的测试则需要更加全面的考量。
例如,电动汽车的电池寿命、充电效率等方面的测试成为了不可忽视的要素。
因此,在车载测试中,全面测试的需求逐渐增加,测试技术也在不断改进以满足这一需求。
三、数据分析与处理能力的提升车载测试技术产生了庞大的数据量,如何高效地处理和分析这些数据也成为了一个亟待解决的问题。
传统方法中,数据的分析和处理通常需要依赖于外部计算设备,过程繁琐且耗时。
而随着计算能力的提升,车载测试设备的处理能力和存储能力也在不断增强,能够实现实时的数据分析与处理,大大提高测试效率。
四、车辆通信技术的升级车辆通信技术的发展对车载测试技术的进一步推进起到了重要作用。
传统的车载测试设备通常采用有线连接方式,存在连接不便、传输速度慢等问题。
而随着5G技术的普及,车辆通信的速度将得到极大提升,测试设备与车辆之间的数据传输将更加方便、快捷,减少了测试时间,并提高了测试的准确性。
五、虚拟测试技术的广泛应用虚拟测试技术作为近年来发展最快的一项车载测试技术,受到了广泛关注。
虚拟测试技术通过计算机仿真,能够准确地模拟车辆在各种条件下的测试情景,大大提高了测试的效率和可靠性。
同时,虚拟测试技术还能通过模拟不同的测试情况,帮助汽车制造商在产品研发阶段更好地评估车辆设计的合理性,减少了实际测试的成本和风险。
智能网联汽车自动驾驶功能检测项目
智能网联汽车自动驾驶功能检测项目引言:智能网联汽车是近年来快速发展的一项技术,其自动驾驶功能对于提升交通安全、提高驾驶效率具有巨大潜力。
然而,为了确保自动驾驶功能的可靠性和安全性,需要进行全面的测试和检测工作。
本项目旨在介绍智能网联汽车自动驾驶功能检测的方法和步骤。
一、测试环境准备为了模拟真实的道路环境,首先需要搭建一个合适的测试环境。
这个环境应该包括道路、交通信号、行人、其他车辆等元素,以便测试自动驾驶功能在不同场景下的表现。
二、功能测试1.基础功能测试基础功能测试是指对自动驾驶系统的基本功能进行测试,包括车道保持、自动跟车、自动超车等功能。
这些功能应该在各种道路条件下进行测试,例如直路、弯道、上坡、下坡等,以确保系统能够稳定运行。
2.紧急情况处理测试在紧急情况下,如突然出现行人或其他车辆突然加速等情况,自动驾驶系统应该能够及时做出反应并采取避免碰撞的措施。
因此,需要进行紧急情况处理测试,评估系统在不同情况下的应对能力。
3.跟踪能力测试自动驾驶系统应该能够准确地跟踪道路上的车辆和行人,并做出相应的行动。
因此,需要进行跟踪能力测试,评估系统对于车辆和行人的识别和跟踪能力。
4.复杂道路测试在复杂道路条件下,如路口、环形交叉口等,自动驾驶系统应该能够正确地处理交通信号和道路标志,并做出相应的决策。
因此,需要进行复杂道路测试,评估系统在这些情况下的表现。
三、安全性测试1.系统可靠性测试为了确保系统的可靠性,需要进行系统可靠性测试,评估系统在长时间工作和高负荷情况下的稳定性。
此外,还需要检测系统是否容易受到黑客攻击,并采取相应的安全措施。
2.系统故障处理测试在系统出现故障的情况下,自动驾驶系统应该能够快速切换到手动驾驶模式,并保证驾驶人和车辆的安全。
因此,需要进行系统故障处理测试,评估系统在各种故障情况下的表现。
3.法规合规性测试为了确保系统符合交通法规的要求,需要进行法规合规性测试,评估系统在各种法规要求下的表现。
《智能网联汽车改装与测试技术》激光雷达的安装与调试

3 激光雷达的安装
激光雷达接线图
线束装配检查方法
线束连接是否正确
1
2
3
4
5
激光雷达的安装
线束通断检查
智能网联汽车改装与测试技术
3 激光雷达的安装
激光雷达接线图
描绘整车上激光雷达部 件之间的实际线束连接 关系
使用电器的外形轮廓或 特征表示,方便直观识 读
将同向导线画在一起, 反映实际线路情况,便 于查找分支和接点
智能网联汽车改装与测试技术
3 激光雷达的安装
检测激光雷达线束连接是否正确
根据激光雷达设置的目标IP设置电脑本地IP地址 激光雷达目标IP地址和电脑IP地址需在同一网段,但不能相同 使用命令(如ifconfig)查看有线IP是否设置成功 例如,速腾激光雷达出厂默认目标IP为192.168.1.102,需要根据实际配置修改电脑本地IP地址为
激光接收器 激光器发射的激光照射到障碍物以后, 通过障碍物的反射,反射光线会经由镜头组汇聚到接收 器上。
信号处理单元 信号处理单元负责控制激光器的发射, 以及接收器收到的信号的处理,根据这些信息计算出目 标物体的距离等信息。
旋转机构 由以上3个组件构成了测量的核心部件。旋 转机构负责将上述核心部件以稳定的转速旋转起来,从 而实现对所在平面的扫描,并产生实时的平面图信息。
激光雷达的安装
确定激光雷达安装方向:正 面朝向车头,线束端为后端
安装及固定步骤: ① 使用2.5mm内六角套筒工具和
Φ2.5mm*1螺栓 ② 使用15N·m的力矩进行紧固 使用水平仪调整安装基座角
度:左右角度为0°,前倾角 度为0°
线束装配检查方法
检查线束布置是否符合布线 图要求
线束走向应横平竖直,避免 斜拉现象
智能驾驶系统中的目标检测技术

智能驾驶系统中的目标检测技术目标检测技术是智能驾驶系统中的核心技术之一。
它的作用是通过分析车辆周围的环境信息,准确地检测出道路上的行人、车辆、交通标志和道路边界等目标物体,为智能驾驶系统提供准确的感知能力,从而确保驾驶安全。
一、目标检测技术的基本原理目标检测技术主要使用计算机视觉和机器学习的方法,通过图像或视频的处理和分析,实现对目标物体的准确检测和识别。
1. 特征提取目标检测技术首先需要从图像中提取出与目标物体相关的特征。
常用的特征提取方法包括颜色特征、纹理特征和形状特征等。
通过对这些特征进行提取和描述,可以有效地表示目标物体在图像中的位置和属性。
2. 候选框生成在确定目标物体的位置时,目标检测技术会生成一系列候选框。
这些候选框是可能包含目标物体的矩形或者多边形区域。
常用的候选框生成方法有滑动窗口和图像分割等。
通过生成候选框,可以缩小目标物体的搜索范围,提高检测的效率。
3. 目标分类和位置回归在生成候选框后,目标检测技术会对每个候选框进行分类和位置回归。
分类是指判断候选框中是否存在目标物体,常用的分类方法有支持向量机、卷积神经网络等。
位置回归是指根据候选框的位置和特征,对目标物体的精确位置进行修正。
二、目标检测技术在智能驾驶系统中的应用目标检测技术在智能驾驶系统中有着广泛应用,主要体现在以下几个方面:1. 碰撞预警和安全驾驶智能驾驶系统利用目标检测技术可以实时地监测行人、车辆和其他障碍物的位置和动态信息。
当检测到潜在的碰撞风险时,系统会及时发出预警信号,提醒驾驶员采取相应的安全措施,从而大大降低交通事故的发生率。
2. 自动泊车和道路辅助目标检测技术可以帮助智能驾驶系统实现自动泊车和道路辅助功能。
系统可以通过检测停车位周围的目标物体,准确判断停车位的大小和空闲情况,并对车辆进行自动控制,实现自动泊车的效果。
同时,在高速公路上,系统也可以通过检测车道线和其他车辆,提供车道偏离预警和自动跟车辅助功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单项报告 综合报告 简短格式 Logo调整
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
15
TS6110信息娱乐测试系统
ı 构建研发· 测试平台,你只需要:
根据标准所需的信号搭配硬件设备 配置核心软件R&S ICS 根据标准PKE车身天线
ı 主要用于确定PKE系统的作用距离和范围,并可以分别测试基站和应答器
的射频性能,包括抗干扰能力。
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
16
R&S专业化解决方案-天线测试
ı 车内天线性能测试
Source: Fujitsu
Source: maxim
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
17
R&S专业化解决方案-路试数据存储与回放
32
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
33
智能汽车中的无线信号
WLAN V2X
TPMS,RKE
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
22
车载主动雷达-频率分配
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
23
车载主动雷达
Linear Frequency Modulated Continuous Wave Radar (LFMCW)
GSM CDMA2000 WCDMA LTE
TPMS,RKE
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
3
智能汽车中的无线信号
GPS, 北斗
WLAN V2X
广播/电视 FM,AM,XM,RDS DAB,CMMB
27
车载主动雷达 – 仿真系统ARTS
通过I/Q端口可增加衰落模拟
Original Tx signal
Modified Rx signal
Automotive Radar Sensor
LFMCW = Linear Frequency Modulated Continuous Wave Radar
产生多个目标,仿真距离(延迟)与速度(多普勒),并可通过FSW与SMW 增加失真与衰落模拟
HD Radio Tests
….. Tests FM Tests AM Tests GSM Tests AMP Tests
DAB/DMB Tests
GPS Tests
RDS Tests
CD Tests
MP3 Player Tests
CR Tests
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
19
智能汽车中的无线信号
车载主动雷达 77GHz
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
20
车载主动雷达
Lane-change Assistance
Blind Spot Detection Adaptive Brake Cruise Assistant Control Lane-change Assistance Blind Spot Detection Radar Application Ultrasonic
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
18
TS6110信息娱乐测试系统
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
9
根据需要定制硬件 -CMW500宽带无线通信测试仪
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
10
根据需要定制硬件 -SMBV100信号发生器
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
13
TS6110信息娱乐测试系统
直观易用的软件界面
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
14
TS6110信息娱乐测试系统
直观易用的软件界面
ı 支持打印报告格式调整
5
TS6110信息娱乐测试系统
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
6
TS6110信息娱乐测试系统
Handling of test modules ….. Tests
Bluetooth Tests G2,G3,G4 Tests
beat frequency = Doppler frequency – frequency shift due to signal propagation time
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
21
汽车主动雷达的历史可以追溯到上世纪80 年代 …
Source: Microwave Journal Magazine
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
28
车载主动雷达模拟器–
基本GUI
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
罗德与施瓦茨 面向智能汽车的测试技术
智能汽车
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
2
智能汽车中的无线信号
GPS, 北斗
WLAN V2X
广播/电视 FM,AM,XM,RDS DAB,CMMB 车载主动雷达 77GHz
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
31
车载主动雷达-综合测试系统
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
ı 你将得到:
可重复的高精度测试能力 根据不同信号的自定义限值配置及测试流程 用于认证和计量的标准报告 所有测试原始数据导出Excel表格便于故障追溯
+
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
7
根据需要定制硬件 -CRTA02接口适配器
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
8
根据需要定制硬件
-CBT32蓝牙测试仪
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
34
TPMS测试系统TS7810
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
35
TPMS
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar