偏置曲柄滑块机构的运动仿真与
N2024运动仿真 曲柄滑块机构仿真

在装配环境下新建仿真部件。
方法/步骤
点击【应用模块】-【动画设计】或 者在功能区右击,弹出菜单选择【动 画设计】。
方法/步骤
左图表示了本步骤的内容,以图片内 容为准。
方法/步骤
基座添加【固定副】。
方法/步骤
添加【旋转副】,需要添加3个旋转 副。
方法/步骤
添加【滑动副】。
方法/步骤
添加【马达】,使机构运动起来。
点击【播放按钮】,开始播放仿真动画。
参考资料:典型运动机构仿真设计:基于UG NX4.0的应用实例
《典型运动机构仿真设计:基于UG NX4.0的应用实例》是2011年3月1日机械工业出版社出版的 图书,作者是张士军。
参考资料:UG NX 7.0装配与运动仿真实例教程
《UG NX 7.0装配与运动仿真实例教程》是2010年9月1日西北工业大学出版社出版的图书,作者 是曹岩。
NX1847运动仿真-曲柄滑块机构仿真
参考资料:UGNX1847从入门到精通(实战案例视频版)
《UGNX1847从入门到精通(实战案例视频版)》是化学工业出版社于2022年出版的书籍,作者 是周涛、刘浩、吕城 。
内容介绍
通过NX动画设计,制作曲柄滑块机构仿真,简单直观了解机械运动原理。
方法/步骤
谢谢观看
曲柄滑块机构运动仿真DOC
湖南农业大学工学院课程设计说明书课程名称:题目名称:班级:20 级专业班姓名:学号:指导教师:评定成绩:教师评语:指导老师签名:20 年月日曲柄滑块结构运动仿真一、概述二、各零件的创建1.曲柄·设置工作目录·创建曲轴的文档·选择好以毫米为单位点击工具栏的→→选择FRONT平面为草绘平面,RIGHT面为参考平面,进入草绘状态。
利用拉伸,选择一个拉伸面为草绘平面,以TOP面为参考平面,进入草绘状态→在第二次拉伸的中间位置创建一个平面平行于RIGHT平面为DTM1,利用镜像工具,将第二次拉伸的部分以DTM1镜像,得到利用拉伸和旋转创建出轴的其他部位如图利用创建平面工具,利用图示位置关系创建出一平面DTM2利用拉伸,以DTM2为草绘平面,创建键槽特征利用倒角选择倒角边和数据再利用倒圆角,选择倒圆角半径和需要倒圆角的边点击保存完成曲轴的创建。
2.连杆以及其他零件利用如曲轴的步骤,创建连杆和其他零件,如下只做出零件完成图连杆上部分连杆下盖活塞上盖底座三、零件的装配·设置工作目录·创建活塞的文档·选择好以毫米为单位进入装配界面后,点击装配将工作目录中的“di”文件放置到界面中,选择接下来逐一装配工作目录中其他零件,装配结果如下图点击应用程序中→机构进入运动仿真界面四、运动仿真点击右边工具栏定义伺服电动机选择如图所示轴定义如下点击确定后,进入运动分析选择分析类型点击运行后,机构将进行运动分析利用回放将运动过程制成运动图片接着利用测量进行分析五、整体爆炸视图。
偏置曲柄滑块机构的运动学分析

研究生课程论文科目:是否进修生?是□ 否■偏置曲柄滑块机构的运动学分析摘要:综合利用函数法和矢量法,在ADAMS软件中对偏置式曲柄滑块机构进行了仿真和运动分析。
首先,通过函数法对偏置式曲柄滑块机构的运动特性进行分析,根据矢量法建立机构的运动学矩阵方程。
然后,介绍了ADAMS在偏置曲柄滑块机构运动学及动力学分析中的应用。
通过对偏置曲柄滑块进行仿真和分析,得到其运动曲线。
该方法的仿真形象直观,测量方便,在机械系统运动学特性分析中具有一定的应用价值。
关键词:偏置曲柄滑块;ADAMS;仿真;运动学Abstract: The article analyzes the simulation and kinetic characteristic of deflection slider-crank mechanism by the function and the vector method in ADAMS.The kinematic equation of the deflection slider-crank mechanism is established by vector method. The application of ADAMS in kinematics analysis of slider-crank mechanism is presented. The motion and dynamic curves of offset slider-crank by ADAMS/View is obtained. In the method, simulation is authentic, visualized and convenient in measurement. The result shows that the method is efficient and useful in the kinematic characteristics analysis of mechanism.Keyword: offset slider-crank mechanism ; ADAMS; simulation ; kinematic0.引言平面连杆机构是由若干个构件用低副(转动副、移动副)连接组成的平而机构,它不仅在众多工农业机械和工程机械中得到广泛应用,还应用于人造卫星太阳能板的展开机构、机械手的传动机构等。
曲柄滑块机构的优化设计及运动仿真学位论文
曲柄滑块机构的优化设计及运动仿真学位论文曲柄滑块机构的优化设计及运动仿真目录目录...............................................................1 摘要............................................................... 第1章绪论........................................................ 选题的目的及意义............................................. 优化设计方法的概述........................................... 国内外的研究现状............................................ 主要研究内容............................................ 第2章曲柄滑块机构的受力分析......................................曲柄滑块机构的分类...........................................曲柄滑块机构的动力学特性.....................................曲柄滑块机构中运动学特性..................................... 第3章偏置式曲柄滑块机构的优化设计................................ 优化软件的介绍.............................................. MATLAB的发展历程和影响...................................MATLAB 在机构设计中的应用................................. 机构优化设计实例分析........................................ 设计目标的建立...........................................根据设计要求,确定约束条件................................利用MATLAB进行优化设计.................................... 编制优化程序.............................................. 程序运行结果及处理........................................ 对优化结果进行验证和分析................................. 第4章偏置曲柄滑块机构的运动学建模与仿真.......................... 偏置曲柄滑块机构运动特性建模................................ 仿真环境简介............................................. 机构的运动学建模........................................ 运动学仿真的实现.......................................... 函数的编制及初始参数的设定............................... 构建Simulink仿真框图.................................... 对仿真结果进行分析...................................... 总结...............................................................〔Toolboxs〕组成虽然该软件的初衷并不是为控制系统设计的,但它提供了强大的矩阵处理和绘图功能,可靠灵活且方便,非常适合现代控制理论的计算机辅助设计。
关于偏置式曲柄滑块机构的优化设计及运动分析论文
关于偏置式曲柄滑块机构的优化设计及运动分析论文关于偏置式曲柄滑块机构的优化设计及运动分析论文1引言曲柄滑块机构是机械设计中常用的一种机构。
按行程速比系数K 设计平面曲柄滑块机构的问题一般归纳为:已知滑块行程H、行程速比系数K,通常有辅助条件,如给定偏距e(或给定曲柄长度r2,或给定连杆长度r3),来设计曲柄滑块机构(即确定未知长度尺寸),最后校验最小传动角γmin。
对该问题的求解,传统采用简单、直观的图解法,但设计精度较低。
利用Matlab解析法可迅速精确地设计曲柄滑块机构。
机构运动分析是根据给定的原动件运动规律,求出机构中其它构件的运动。
通过分析可以确定某些构件运动所需的空间,校验其运动是否干涉;速度分析可以确定机构从动件的速度是否合乎要求;加速度分析为惯性力计算提供加速度数据。
运动分析是综合分析和力分析的基础。
使用Matlab中的Simulink,可对动态系统进行建模、分析和仿真。
从而在形成实际系统前,能进行适时的修正,以减少总体设计时间,实现高效开发的目的。
2优化设计2.1设计实例及方程例如:要求设计滑块的'行程H=100mm,K=1.25,γmin≥40°的曲柄滑块机构。
式中:r1为滑块位移;r2为曲柄长度;r3为连杆长度;r4为偏距。
根据图1建立矢量方程:r2+r3=r1+r4速度方程的矩阵形式:1r3sinθ30-r3cosθ3·r1ω3=-ω2r2sinθ2ω2r2cosθ2加速度方程的矩阵形式:1r3sinθ30-r3cosθ3¨r2α3=-α2r2sinθ2-r2ω22cosθ2-r3ω23cosθ3α2r2cosθ2-r2ω22sinθ2-r3ω23sinθ3根据行程,极位夹角,行程速比系数,最小传动角的定义可推出以下方程:θ=K-1K+1×180°θ=arcsinr4r3-r2-arcsinr4r3+r2H=(r2+r3)2-r24-(r3-r2)2-r24γmin=arcosr2+r4r3式中:K为行程速比系数;H为行程;θ为极位夹角;γmin为最小传动角。
基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究
基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究偏置曲柄滑块机构是机械系统中常见的重要构件之一,其应用广泛且具有重要的工程实际意义,在许多对运动精度和效率要求较高的机械设备中均有应用。
本文将根据Simmechanics软件平台,对偏置曲柄滑块机构进行运动学建模及仿真研究。
1. 偏置曲柄滑块机构的结构与运动特点偏置曲柄滑块机构一般由曲柄、连杆、滑块等部件组成,其构造简单却效果卓越,能够使线性运动转化为旋转运动,并且具有体积小、质量轻、运动平稳等特点,被广泛应用于发动机、冲床、组合机床等机械设备中。
2. 基于Simmechanics的偏置曲柄滑块机构建模2.1 组件翻译与刚体连杆连接在Simmechanics中,我们首先需要将偏置曲柄滑块机构的各个组件按照真实的几何形态进行翻译,在建模时,偏置曲柄滑块机构的曲柄与连杆被定义为刚体,而机构中的滑块被定义为运动副。
2.2 连杆的轴向位置与杆长在建模时,我们需要输入连杆的轴向位置以及杆长数据,使得机构的运动精度更加准确。
2.3 滑块相对于曲柄的偏移量在Simmechanics建模中,我们可以通过设置连接杆的连接方式,将连接杆绑定到机构中心位置,在此基础上对机构中滑块的偏移量进行设置,以确保机构运动的准确性。
3. 偏置曲柄滑块机构运动仿真在完成基于Simmechanics的偏置曲柄滑块机构建模后,我们可以通过运动仿真,来进一步验证机构在真实运动中的性能表现。
3.1 曲柄旋转角度与滑块位移关系图在Simmechanics中,我们可以通过绑定虚拟仪表板,对偏置曲柄滑块机构的曲柄旋转角度与滑块位移进行实时监测,并将监测结果以关系图的形式呈现。
3.2 力矩曲线与功率图在Simmechanics中,我们可以添加作用于机构中各个部件的外部力,预测机构在不同工作条件下的承载能力,并生成相应的力矩曲线和功率图,以此来评估机构的工作性能。
4. 结论通过Simmechanics软件平台实现了偏置曲柄滑块机构的运动学建模及仿真,进一步验证了该型机构的运动计算和运动性能表现,为机械系统的设计和优化提供了较高的建模精度及仿真可靠性。
PROE4.0曲柄滑块机构运动学仿真

曲柄滑块机构运动学仿真
1、目的
本文档旨在基于PROE4.0版本软件,设计一曲柄滑块机构,并仿真测量其关键点速度、加速度、位移等关键信息。
2、模型设计
2.1 整体尺寸介绍
模型主要包括底座、曲柄、连杆、滑块四个零部件,具体尺寸如图所示。
AB=28mm,BC=68mm,CE=435mm,AD=150mm,DF=60mm。
图1 关键位置尺寸
2.2 部件连接关系
1)底座为机架,固定连接,在PROE软件中,切记连接成“用户定义”-“缺省”
2)曲柄与底座为“铰接”。
与连杆也为“铰接”。
3)滑块与底座为“滑动杆”连接。
4)连杆一端与曲柄为“铰接”;再新建一连接关系,与滑块“铰接”。
3、运动学仿真设置
1)在装配完成后,点击“应用程序”-“机构”菜单,进入机构仿真界面。
2)添加伺服电机驱动,设置成如图界面,并在“速度”一栏,点击“速度、位置、加速度”
3)仿真。
点击仿真按钮,设置成如图所示,选择“运动学”仿真,并点击“运行”,机构开始动作。
4)回放,保存。
仿真完成后,点击回放按钮,可以回放仿真,并进行保存。
5)测量。
仿真结束后,可以测量关键信息,如关键点速度、加速度、位置等,如图所示。
在左上角可以显示相应曲线。
6)仿真结束后,保存。
下一次运行时,可以读取相关数据。
基于ABAQUS的偏置曲柄滑块机构运动仿真分析

基于ABAQUS的偏置曲柄滑块机构运动仿真分析
王剑宏;肖洁
【期刊名称】《农业装备技术》
【年(卷),期】2024(50)2
【摘要】曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等机构中,曲柄滑块机构以曲柄为主动件,滑块为从动件,将曲柄的转动转换为滑块的往复运动。
为了研究偏心距对曲柄滑块机构的影响,通过在三维设计软件UG建立曲柄滑块机构UG模型,并使用ABAQUS软件对不同偏心距的曲柄滑块机构进行动力学仿真分析,仿真结果分析了曲柄滑块机构的位移曲线以及应力变化曲线,发现偏置曲柄滑块机构具有急回特性,因此在需要较稳定的场合,尽可能不要使用偏置曲柄滑块机构,应使用对心曲柄滑块机构,合适的偏心距可以降低连杆连接处的应力,因此在低速重载的场合应该使用小偏心距的偏置曲柄滑块机构。
【总页数】3页(P47-48)
【作者】王剑宏;肖洁
【作者单位】贵州省毕节市农业机械研究所
【正文语种】中文
【中图分类】TG3
【相关文献】
1.基于MATLAB_Simulink的偏置式曲柄滑块机构运动学仿真
2.基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究
3.基于SolidWorks
偏置曲柄滑块机构运动仿真分析4.基于ADAMS的偏置曲柄滑块机构的运动学及动力学仿真研究5.基于Matlab的偏置曲柄滑块机构的运动特性仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
曲柄滑块机构的运动学仿真
《系统仿真与matlab》综合试题题目:曲柄滑块机构的运动学仿真编号:24难度系数:*****姓名班级学号联系方式成绩第一部分:课题理解1、课题要求:对图示单缸四冲程发动机中常见的曲柄滑块机构进行运动学仿真。
已知连杆长度:m r 1.02=,m r 4.03=,连杆的转速:22θω =,33θω =,设曲柄r 2以匀速旋转,s r / 502=ω。
初始条件:032==θθ。
仿真以2ω为输入,计算3ω和1r,仿真时间0.5s 。
2、个人理解:本实验是对运动进行仿真,根据滑块的运动演示连杆的运动过程。
首先,建立两杆和滑块位置间的数学关系,计算出运动方程;其次,运用matlab 动画功能,对给定的2ω值进行运动仿真;最后,建立友好的界面,方便用户改变2ω,显示3ω和运行动画。
第二部分:试题建模由几何关系可得:两边求导数可得:即得2θ=w2*t; 3θ =arcsin(r2*sin(2θ )/r3);w3=r2/r3*w2*cos(2θ )./cos(3θ );第三部分:程序实现1、程序模块:2、程序流程:特色在于:随动画同时输出的w3值为动画运行到当前位置时的转动角速度。
并可以多次设定w2值,进行波形比较。
2、程序代码:w2 = str2double(get(handles.w2input,'string'));if w2~=0 %判断用户是否输入w2%如果w2被赋值,则进行变量初始化t=0;dt=0.01;r2=0.1;r3=0.4;x0=0.1;y0=0;x1=0.5;y1=0;%在图形显示框axes_d中进行固定图形的绘画axes(handles.axes_d)%画三角支架plot(0,-0.03,'color',[0.5,0.5,0.5],'linestyle','^',...'linewidth',10);hold onplot(0,0,'color',[0.4,0.4,0.4],'linestyle','.',...'markersize',40);%画r3转动轨迹圆m=[0:0.01:2*pi];plot(0.1*cos(m),0.1*sin(m),'color',[0.6,0.8,0.8],'linestyle','.',...'markersize',5);%画水平线plot([-0.2;0.6],[-0.05;-0.05],'color','b','linestyle','--',...'linewidth',1);%画支点等高线plot([-0.2;0.7],[0;0],'color','b','linestyle','--',...'linewidth',1);%设置坐标范围axis([-0.15,0.7,-0.41,0.41]);%不显示坐标轴%axis('off');%创建杆间连接点point=line(x0,y0,'color','k','linestyle','.',...'markersize',30);%创建连接点水平指示线zhishi=line([x0-0.1;x0+0.1],[y0;y0],'color','b','linestyle','--',...'linewidth',2);%创建杆r2body2=line([0;x0],[0;y0],'color',[0.2,0.25,0.25],'linestyle','-',...'linewidth',5);%创建杆r3body3=line([x0;x1],[y0;y1],'color',[0.2,0.25,0.25],'linestyle','-',...'linewidth',5);%创建活塞huosai1=line([x1+0.01;x1+0.15],[y1;y1],'color','b','linestyle','-',...'linewidth',28);%创建活塞连接点huosaidian=line(x1+0.01,y1,'color','k','linestyle','.',...'markersize',40);%创建汽缸qigang1=line([0.651;0.651],[-0.05;0.05],'color',[0.5,0.5,0.5],'linestyle','-',.. .'linewidth',5);qigang2=line([0.3;0.655],[0.056;0.056],'color',[0.5,0.5,0.5],'linestyle','-',...'linewidth',5);qigang3=line([0.3;0.655],[-0.056;-0.056],'color',[0.5,0.5,0.5],'linestyle','-', ...'linewidth',5);set(handles.axes_w3,'XMinorTick','on')%进行动画过程while t<4t=t+dt;a2=w2*t;a3=asin(r2*sin(a2)/r3);w3=r2/r3*w2*cos(a2)./cos(a3);r2=0.1;x0a=r2*cos(a2);y0a=r2*sin(a2);x1a=x0a+r3*cos(a3);y1a=0;x=x0a;y=y0a;%在图形显示框axes_d中进行图形的刷新axes(handles.axes_d)%重绘杆r2set(body2,'xdata',[0;x0a],'ydata',[0;y0a]);%重绘杆r3set(body3,'xdata',[x0a;x1a],'ydata',[y0a;y1a]);%重绘杆活塞set(huosai1,'xdata',[x1a+0.01;x1a+0.15],'ydata',[y1a;y1a]); %重绘活塞连接点set(huosaidian,'xdata',x1a+0.01,'ydata',y1a);%重绘杆连接点set(point,'xdata',x0a,'ydata',y0a);%重绘指示线set(zhishi,'xdata',[x0a-0.1;x0a+0.1],'ydata',[y0a;y0a]);set(handles.axes_d,'XMinorTick','on')%输出实时w3的值set(handles.w3_output,'string',num2str(w3));%在图形显示框axes_w3中绘制w3的实时波形axes(handles.axes_w3)%设置坐标轴axis([0,4,-w2/4-0.1,w2/4+0.1]);hold onplot(t,w3,'color','k','linestyle','.',...'markersize',5);set(handles.axes_w3,'XMinorTick','on')drawnow;endw2=0;end第四部分:GUI界面规划1、控件组成:1.面板(1个):作为背景。
基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究
基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究王增胜;孔令云;郭晓君【摘要】为了提高偏置曲柄滑块机构的设计水平和效率,以MATLAB的动态仿真工具Simulink、Smmchanics为平台,建立了偏置曲柄滑块机构运动分析的仿真模型,具体阐明了这种建模方法与仿真的实现过程,结果表明该仿真方法能方便、准确地得到机构的运动数据,能为机构的选型、优化设计提供参考依据,并对其他类似机构的建模与仿真具有一定的参考价值.【期刊名称】《现代机械》【年(卷),期】2013(000)005【总页数】4页(P19-22)【关键词】SimMechanics;偏置曲柄滑块机构;运动学;仿真【作者】王增胜;孔令云;郭晓君【作者单位】黄河科技学院机器人与自动化研究所,河南郑州450063;黄河科技学院机器人与自动化研究所,河南郑州450063;黄河科技学院机器人与自动化研究所,河南郑州450063【正文语种】中文【中图分类】TP391.90 引言曲柄滑块机构是用曲柄和滑块来实现转动和移动相互转换的平面连杆机构,也称曲柄连杆机构。
在曲柄滑块机构中,当滑块的导路方向与曲柄的回转中心存在偏距e 时,称为偏置曲柄滑块机构。
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中。
机构运动分析的任务是根据机构的尺寸及原动件已知的运动规律,求构件中从动件上某点的轨迹、位移、速度及加速度和构件的角位移、角速度及角加速度。
运动分析的目的是了解已有机构的运动性能,同时也是设计新的机械和研究机械动力性能的必要前提。
通过分析,可以确定某些构件所需要的空间,或确定机壳的轮廓,检验构件之间是否碰撞干涉;通过速度分析可以确定从动件的速度是否合乎要求;通过加速度分析可以确定惯性力等。
机构运动分析的主要方法有图解法、解析法。
图解法因其作图、计算工作量大、精度差的缺点,在实际工程设计应用中存在很大的局限性。
[1]解析法有较高的精度,但其计算工作量大。
曲柄滑块机构运动的Simulink仿真实验报告
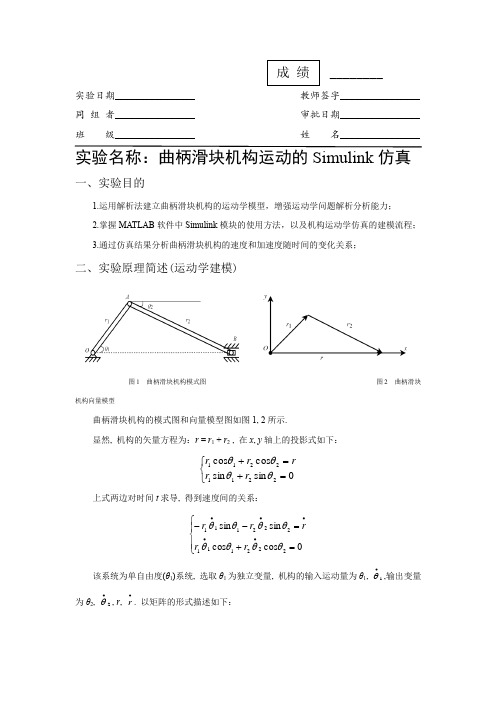
成绩 ________实验日期________________ 教师签字________________ 同组者________________ 审批日期________________ 班级________________ 姓名________________实验名称:曲柄滑块机构运动的Simulink仿真一、实验目的1.运用解析法建立曲柄滑块机构的运动学模型,增强运动学问题解析分析能力;2.掌握MA TLAB软件中Simulink模块的使用方法,以及机构运动学仿真的建模流程;3.通过仿真结果分析曲柄滑块机构的速度和加速度随时间的变化关系;二、实验原理简述(运动学建模)图1 曲柄滑块机构模式图图2 曲柄滑块机构向量模型曲柄滑块机构的模式图和向量模型图如图1, 2所示.显然, 机构的矢量方程为:r = r1 + r2 , 在x, y轴上的投影式如下:⎩⎨⎧=+=+sinsincoscos22112211θθθθrrrrr上式两边对时间t求导, 得到速度间的关系:⎪⎩⎪⎨⎧=+=--•••••coscossinsin222111222111θθθθθθθθrrrrr该系统为单自由度(θ1)系统, 选取θ1为独立变量, 机构的输入运动量为θ1, 1•θ,输出变量为θ2, 2•θ, r, •r. 以矩阵的形式描述如下:⎝⎛2222cos sin θθr r ⎪⎪⎭⎫01•••⎪⎪⎭⎫ ⎝⎛--=⎪⎪⎪⎭⎫⎝⎛111112cos sin θθθθr r r进一步整理可得:⎝⎛=⎪⎪⎪⎭⎫⎝⎛••22222cos sin θθθr r r •-⎪⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫111111cos sin 01θθθr r 对速度关系进一步关于时间t 求导, 得到加速度之间关系:⎪⎩⎪⎨⎧=+-++-=+-+-••••••••••••••0)cos sin ()cos sin ()sin cos ()sin cos (222222111211222222111211θθθθθθθθθθθθθθθθr r rr r 机构的输入运动参数为θ1, ,1•θ 1••θ,输出变量为θ2, 2•θ, 2••θ , r , •r , ••r ,以矩阵形式表达:⎝⎛=⎪⎪⎪⎭⎫⎝⎛••••22222cos sin θθθr r r ⎪⎪⎪⎭⎫ ⎝⎛-+---⎪⎪⎭⎫••••••••-11122221211111222212111cos sin sin sin cos cos 01θθθθθθθθθθθθr r r r r r 因此可以根据两个矩阵方程的输入变量和输出变量在Simulink 中设计逻辑框图, 并在MATLAB 命令窗口中编写方程的源代码, 最终可在虚拟示波器中导出加速度、速度和位移的时间历程曲线.三、加速度求解过程1.Simulink 建模框图图3 匀角加速度(α = 10 rad/s2)下求解加速度和速度以及位移的时间历程曲线的Simulink建模框图2.匀角加速度(α = 10 rad/s2)下求解时间历程曲线的源代码function y = fcn(u)%u(1)=alpha1;u(2)=omega1;u(3)=theta1;u(4)=omega2;u(5)=theta2;%y(1)=alpha2;y(2)=a;y = [0;0];r1 = 15; r2 = 55;A = [r2*sin(u(5)) 1;r2*cos(u(5)) 0];B = [-r1*(u(2)^2)*cos(u(3))-r2*(u(4)^2)*cos(u(5))-r1*u(1)*sin(u(3)); r1*(u(2)^2)*sin(u(3))+r2*(u(4)^2)*sin(u(5))-r1*u(1)*cos(u(3))];y = inv(A)*B;3.运行结果初始条件设置:匀角加速度(α = 10 rad/s2)、仿真时间为5 s下的加速度、速度和位移的时间历程曲线图4 匀角加速度下滑块的加速度时间历程曲线图5 匀角加速度下滑块的速度时间历程曲线图6 匀角加速度下滑块的位移时间历程曲线在匀角加速度(α = 10 rad/s2)条件下, 曲柄滑块的加速度、速度和位移随着时间的增加,并且三个物理量的变化周期越来越小, 此外加速度和速度的振幅也随时间的增加而增大,位移振幅不随时间的增加而增大的,始终保持不变.四、实验结果分析与讨论1.结果分析在初始条件下,曲柄静止不动,滑块没有受到外力作用,因此滑块的加速度为 0,这符合理论预期。
基于MATLAB_Simulink的偏置式曲柄滑块机构运动学仿真

偏置 式 曲柄 滑块 机 构 为例 , 提 了用 MA L T AB软 件仿 真
『 ri0 I I『 厂i 22jo0 r jo&] 、 1 3n3] s 】 一 2s r cs2 3 cs , 2n 一 ∞ -( o
f柄 滑 块 机 构是 单 缸 四 冲程 发 动机 的关 键 机 构 , } f 1 对
同理 , ( ) 式 ( ) 时 间求 二 阶导 数 , 到偏 置式 式 2和 3对 得
曲柄 滑块 机构 的加速 度方 程 , 成矩 阵形式 : 写
l柄滑块机构进行运动学仿真意义重大 ,通过仿真可以 } n
摘
要: 针对偏置式曲柄滑块机构, 建立7速度和加速度的闭环矢量 方程, 使用 MA L B S l TA i mu ( 对偏置式曲柄滑块
裘孳籀 雾 | |
机 进 了 动 仿 ,到 连 及 块 运 线 使 这 方 可 方 地 察 机 运 特I 变 高 构 行 运 学 真 得 了 杆 滑 的 动曲 。 用 种 法 以 便 观 到 构 动 化 提 了 生 的
a e e t b i h d i h sp p r y u i g t e MATL i l k t o , h i e t ssmu a i n o e e t n c a k si e r sa l e n t i a e .B sn h s AB S mu i o l t e k n ma i i l t fd f c i r n l r n c o l o d
2. a tc I1Ex ei n tto . ii ie st fE e to cT c n lg ,Guln 5 0 4. i a) Prciea1 p rme tS ain Guln Un v riyo l crni e h oo y ( ii 41 0 Ch n
曲柄导杆滑块等机构测试仿真实验报告

曲柄导杆滑块等机构测试仿真实验报告一、引言曲柄导杆滑块等机构是一种常用于机械系统中的机构,用于将旋转运动转换为直线运动或反之。
在实际工程中,对于该机构的性能和运动特性进行测试和仿真实验,对于机构的设计、优化和功能验证都具有重要意义。
本实验报告将主要探讨曲柄导杆滑块等机构的测试方法、仿真实验步骤以及实验结果分析。
二、测试方法测试曲柄导杆滑块等机构的性能和运动特性,可以通过以下几种方法进行:1. 实际物理模型测试构建实际的曲柄导杆滑块等机构物理模型,通过测量和观察模型在运动过程中的性能和运动特性,获取相关数据,并进行分析和评估。
2. 数值仿真模拟使用计算机辅助设计软件对曲柄导杆滑块等机构进行建模,并进行数值仿真。
通过改变不同参数和条件,模拟机构的运动过程,获取相关数据,并进行分析和评估。
3. 动态仿真分析利用专业的仿真软件,对曲柄导杆滑块等机构进行动态仿真分析。
通过输入曲柄的运动轨迹和滑块的质量等参数,模拟机构在不同条件下的运动情况,获取相关数据,并进行分析和评估。
三、仿真实验步骤1. 建立模型首先,利用计算机辅助设计软件建立曲柄导杆滑块等机构的三维模型。
根据实际情况和设计要求,确定曲柄的形状和尺寸,导杆的长度和直径,滑块的质量和运动方式等参数。
2. 设置运动条件确定曲柄的运动轨迹和速度,以及滑块的初始位置和速度等运动条件。
根据实际应用需求,设置不同的运动条件,以观察和分析机构在不同条件下的性能和运动特性。
3. 进行仿真实验通过计算机仿真软件进行实验,利用物理引擎模拟机构的运动过程。
根据设定的运动条件,观察和记录机构在仿真中的运动轨迹、速度、加速度等数据。
4. 数据分析与评估根据实验结果,对机构的性能和运动特性进行分析和评估。
可以通过绘制曲柄导杆滑块等机构的运动曲线、速度曲线以及加速度曲线,来直观地了解机构的运动规律。
四、仿真实验结果分析通过数值仿真实验,我们可以获取曲柄导杆滑块等机构在不同参数和条件下的运动特性数据。
曲柄滑块运动仿真
一.零件图
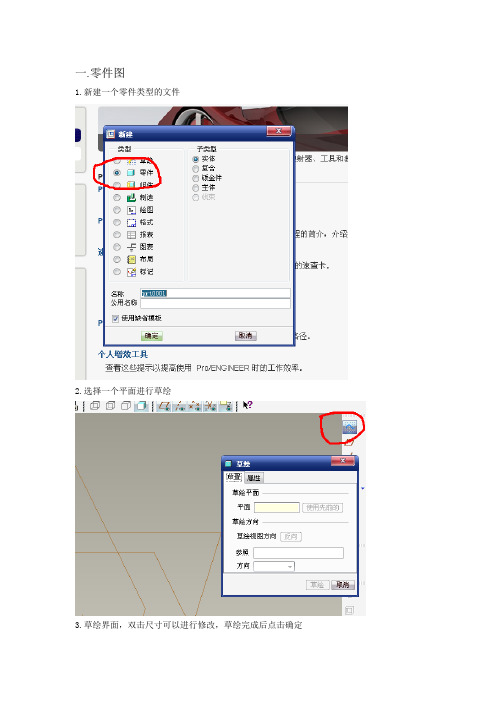
1.新建一个零件类型的文件
2.选择一个平面进行草绘
3.草绘界面,双击尺寸可以进行修改,草绘完成后点击确定
4.草绘完成后,进行拉伸
5.对拉伸的数值及拉伸的方向可以进行设计
6.拉伸完成后点击右下角的确定
1.新建一个组件类型的文件
2.点击添加零件进行装配
3.选定零件后,对零件进行约束
4.由于是底座,约束选择刚性的固定
5.添加第二个要进行装配的文件,由于是主动轴,约束选择销钉连接进行装配
将面相切,如果装反则点击反相装配
6.滑块装配略过
7.装配连杆,选择销钉连接与圆盘进行装配,选择圆柱连接与滑块进行装配
8.用销钉连接对销进行装配
1.选择应用程序中的机构进行运动仿真
2.给机构加一个电动机,选择电动机选项
3.对机构进行运动仿真,点击机构分析
如下图,上面是指要分析的类型,下面是指动画持续的时间
仿真类型选择运动学,时间随便,选择完成后点击运行,机构就会运动起来
4.对动画进行保存,点击回放进行保存
5.对运动进行运动分析,点击测量结果
打开要进行分析的动画
测量类型与时间有关,选择测量与时间,然后如图新建一个测量量
上面红圈是要测量的类型,下面红圈是要测量的零件上的点或者轴
由于要对滑块进行运动分析,在滑块上任取一点,然后点击确定
选择测量完的数据measure1选择上面的显示曲线即可以显示测量曲线如图
点击图标上的文件可以导出曲线的excel和文本
新建一个测量量对速度进行分析
选择要测量的类型
完。
基于Simulink的偏置式曲柄滑块机构运动仿真

摘 要 : 对 偏 置 式 曲 柄 滑 块 机 构 , 立 了 速 度 和 加 速 度 的 闭 环 矢 量 方 程 , 用 Smuik对 偏 置 式 曲 柄 滑 块 机 针 建 使 i l n 构 进 行 了运 动 学 仿 真 , 到 了 连杆 及 滑块 的运 动 曲线 . 用这 种 方 法 可 以方 便 的 观察 到 机 构 运 动 特 性 的 变 化 , 得 使
情 况下 旋转[ ] 3 . () 1 匀角 速度输 入 时偏置式 曲柄 滑块 的运 动学 仿 真. 设 曲柄 以 1 8 5rd s 速 旋 转 , 真 时 间为 假 8 . a / 匀 仿 0 0 , 他初 始条 件如表 l . 7S其 所示 .
表 1 仿 真 的初 始 条 件
安 徽 工 程 科 技 学 院 学 报
图 2 偏 置 式 曲 柄 滑 块 机 构 仿 真 模 型
2 2 运 动 学 仿 真 .
在仿 真运 行之前 , 须为每 个积 分器建 立适 当的初始 条件 . 必 初始 条件可 以通过 简单 的几 何关 系及 相应
程 序求解 给 出. 分两 种情 况进行 分析 , 一种情 况为 曲柄匀 速 旋转 , 外一 种情 况 为 曲柄 在 一 定角 加 速度 的 另
积 分 器
0 2
0 3
环 境 变 量
t2 h0
t3 h0
初 始 条 件
3t2 7 /
T4 【 /
积 分 器
2
( 1 J 3
环 境 变 量
o 0 m2
o 0 m3
初 始 条件
1 8 5rd s 8 . a /
文章 编号 : 6 2 2 7 ( 0 8 0 — 0 0 ~0 l 7 — 4 7 20 4 0 5 3 J
偏置曲柄滑块机构的运动仿真与分析
偏 置 曲柄 滑 块 机 构 的运 动仿 真 与分 析
韩 刚 ,龚 灯
( 徽 国 防科 技 职 业 学 院 机 械 系 , 安徽 六 安 2 7 1 ) 安 30 1
摘 要 :基 于 MA AB软 件 的 SmMeh nc 模 块 ,建 立 了偏 心 曲柄 滑 块 机 构 的 通 用 仿 真 模 型 ,得 出 了偏 心 TL i cai s 距 为零 时 滑 块 运 动 中的 位 移 、 速 度 和 加 速 度 变 化 曲 线 , 并 分 析 了不 同偏 心 距 对 滑 块 运 动 速 度 和 加 速 度 的 影
如 卜:
i ii l p sto . n ta o ii n m
—
J itS n o 分 别 指定 连接 处 的驱动 和传感 器 。 on e s r
1 2 机 构 尺 寸 和 惯 性 的 确 定 .
e一 00
ca k ln t rn e g h= 0 4; .
—
机 构 中杆 AB的 长度 ca k l gh 0 rn — e t 一4 0mm, n 杆
第 5期 ( 第 1 4期 ) 总 7
21 0 2年 1 月 O
机 械 工 程 与 自 动 化 M ECHANI CAL ENGI NEERI NG & AUTOM ATI ON
No 5 .
Oc . t
文章 编 号 : 6 2 6 1 ( 0 2 0 — 0 7 0 17 — 4 3 2 1 ) 50 5 — 2
C y 一 r d ln t 一 o e g h*s n t e a i ( h t );
— _
gou ( x ( r nt ln t r d ln t ) c s t ea) r nL 一 ca l_e g h+ o e g h o (h t ;
基于ADAMS的偏置曲柄滑块机构的运动学及动力学仿真研究

10 M Pa , 泊松比 ∃= 0 3 , 以此来研究滑块的位移、
5 [ 4]
图 4 滑块速度曲线
图 5 滑块加速度曲线
由滑块速度曲线可以看出来, 滑块速度上升的 斜率小于速度下降的斜率 , 正好对应于加速度曲线 当中的加速度的变化 , 由此可知当曲柄匀速转动的 时候, 滑块来回运动的速度, 加速度均不同 , 表明偏 置曲柄滑块机构的急回特性。
[ 1]
。该方法较
[ 2]
: x - vx = 0 y - vy = 0 z - vz = 0 = 0 = 0 = 0 ( 1)
手工计算或作图法效率高, 精确应用广泛
。现主
要研究 ADAM S /V ie w 对机构的建模分析, 从而得到 偏置曲柄滑块机构的运动学曲线和动力学曲线。
1 ADAM S 仿真基本流程
匀速转动 , 连杆长度 lB C = 300 mm, lAB 和 lBC 的截面尺 寸为 10 mm ! 25 mm, 滑块长为 100 mm, 底面直径为 80 mm, 偏心距 e 为 60 mm。所有构件的材料均为铸 钢: 密 度 #= 7 800 kg /m , 弹 性 模 量 E = 2 02 !
图 2 偏置曲柄滑块机构模型
8044
科
学
技
术
与
工
程
10 卷
图 6 滑块位移、 速度和加速度对应曲线
由滑块位移、 速度和加速度对应曲线很容易得 出这样的结论: 位移 达到峰值的时 候, 加速度 也到 达了反向的峰值, 这时候速度刚好为零。 由此可见 ADAMS 仿真形象直 观, 建立测 量方 便, 并具有功能强大的数据后处理模块。
The K inematic /D ynam ic Si m ulations in O ffset crank M echan is m Based on ADAM S
曲柄滑块机构的运动仿真

曲柄滑块机构的运动仿真赵晶群2150820041曲柄滑块机构有对心曲柄滑块、偏置曲柄滑块和偏心轮机构三种,如图: 图1对心曲柄滑块机构对心曲柄滑块:滑块上转动副中心的移动方位线通过曲柄旋转中心。
对心曲柄滑块,其极位角为0,形成速比系数为1,滑块在往返中平均速度相等。
图2 偏置曲柄滑块机构偏置曲柄滑块:滑块上转动副中心的移动方位线不通过曲柄旋转中心。
其极位角不为0,具有急回特征,常被用来节省空回行程的时间,以提高劳动生产率。
曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等的主机构中。
活塞式发动机以滑块为主动件,把往复移动转换为不整周或整周的回转运动;压缩机、冲床以曲柄为主动件,把整周转动转换为往复移动。
偏置曲柄滑块机构的滑块具有急回特性,锯床就是利用这一特性来达到锯条的慢进和空程急回的目的。
当曲柄长度很小时,通常把曲柄滑块做成偏心轮,这样不仅增大了轴颈的尺寸,提高偏心轮的强度和刚度,而且当轴颈位于中部时,还可以安装整体样式连杆,使得结构简化。
偏心轮机构可以实现非线性传动关系,且传动平稳,结构紧凑,动力平衡性好。
图3 偏心轮机构曲柄滑块的运动仿真分为以下四个步骤:(1)建立曲柄滑块机构所需构件:机架、曲柄、连杆、滑块(2)装配(3)运动仿真(4)运动分析一、建立曲柄滑块机构所需构件1、机架启动Pro/E,新建文件:选“零件”/“实体”,文件名jijia-1,以front 平面为草绘平面。
确定打钩,对称拉伸,拉伸距离为5.1、机架绘制一个直径为5mm的圆,拉伸长度为140mm拉出两个圆柱凸台:绘制一个直径为5mm的圆,拉伸距离为3mm和一个直径为3mm的同心圆,拉伸距离为3mm2、曲柄新建零件,名称为qubing-2,拉伸草绘,拉伸距离为33、连杆新建零件,名称liangan-3. 拉伸草绘,只在一边画圆拉伸孔,再在另一边拉伸凸台。
凸台与R2.5同心,高度3。
4、滑块新建零件,名称huakuai-4. 对称拉伸,拉伸长度为10绘制一个直径为3mm的圆,拉伸距离为10二、零件的装配(1)进入装配模式(2)装入基础元件单击工具栏中的【装配】按钮,弹出【打开】对话框,选择“jijia-1”,单击打开按钮,弹出【元件放置】操控面板。
偏置式曲柄滑块机构仿真与运动分析

r, 3 偏距 为 r 曲柄转 角为 0 , , 连杆 转角 为 0 。 ,
将 式 ( ) 时间 t 导 , 到滑块 的加 速度 : 6对 求 得
.
d v
一
/02 — ')【 2
… … … … …
r o ( 2+0 ) r C S0 1 s0 c 3 2 O ‘2
+一
…
— —
% U 2)=o g ( me a一2
滑块 的位移 为 :
r t= rc s 2+rc s 3o … … … … … … … … ( ) 2oO 3 o O 1
将式 ( ) 时间 f 1对 求导 , 到滑块 的速 度 : 得
=
誓=(id+s3 ) …. 一z00 r0 。 r 223 i s n n
… … … … … … … … … … … … … … … … …
根据 图 1 立 了偏 置 式 曲 柄 滑块 机 构 向 量模 型 , 建 如 图 2所 示 。其 中 , 为 滑块 的位 移 ,模 为 r;R : 为 曲柄 对应 的 向量 ,模 为 r ,转 角 为 0 ;R,为连 杆 : 所 对应 的 向量 ,模 为 r,转 角 为 0 ;R为偏 距 ,模为 。 ,
通 过 函数 法 对 偏 置 式 曲柄 滑块 机 构 的运 动特 性进 行 分 析 ,根 据 矢 量 法 建 立 机 构 的 运 动 学 矩 阵方 程 。 然 后 ,在 S uik软 件 环 境 下建 立该 方程 的 仿 真模 型 , 进 行 运 动 分 析 ,得 到 了偏 置 式 曲柄 滑 块 机 构 的运 动 曲线 。 将 函 i l m n 数 法 与 矢 量 法 相 结 合 有 助 于更 深 入 地 了解机 构 的 运 动 特 性 。 关键 词 :偏 置 式 曲柄 滑 块 机 构 ;运 动 分 析 ;机 构 仿 真
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e=0.15
=ve=03
,观
察
曲
线
,可
以
看
出
当
偏
心
距
最
大时,滑块 速 度 最 先 降 低 到 零,说 明 随 着 偏 心 距 的 增
加 ,机 构 的 速 度 波 动 变 大 。
图5为不同偏心距下滑块加速度随时间的变化规
律。当e=0,即对心机 构 时,加 速 度 曲 线 左 右 对 称,而
随 着 偏 心 距 的 增 大 ,逐 渐 出 现 了 左 右 不 对 称 的 现 象 ,这
机构中杆 AB 的 长 度 crank_length=400 mm,杆 BC 的长度 rod_length=1 200 mm,滑 块 的 长 度l= 100mm。 假 设 以 上 各 杆 均 为 截 面 直 径 Φ20 mm 的 圆 杆,在 Body模块中,需 要 输 入 刚 体 的 惯 性 张 量。 根 据 理 论 力 学 的 知 识 ,杆 件 的 惯 性 张 量 计 算 公 式 为 :
第 5 期 (总 第 174 期 ) 2012 年 10 月
机械工程与自动化 MECHANICAL ENGINEERING & AUTOMATION
文 章 编 号 :1672-6413(2012)05-0057-02
No.5 Oct.
偏置曲柄滑块机构的运动仿真与分析
韩 刚,龚 灯
(安徽国防科技职业学院 机械系,安徽 六安 237011)
收 稿 日 期 :2012-03-13; 修 回 日 期 :2012-05-25 作者简介:韩刚 (1983-),男,安徽巢湖人,助教,硕士,研究方向:精密加工与仿真。
· 58 ·
机 械 工 程 与 自 动 化 2012年第5期
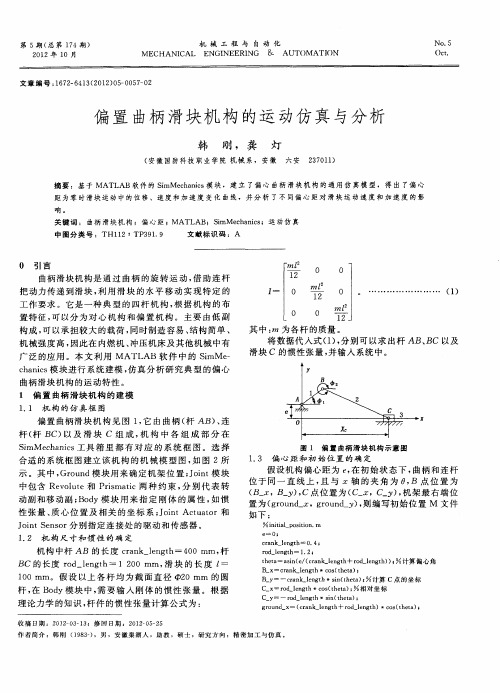
ground_y= - (crank_length+rod_len通 过 曲 柄 的 旋 转 运 动,借 助 连 杆
把动力传递到滑块,利 用 滑 块 的 水 平 移 动 实 现 特 定 的 工作要求。它是一种 典 型 的 四 杆 机 构,根 据 机 构 的 布 置特征,可以分为 对 心 机 构 和 偏 置 机 构。 主 要 由 低 副 构 成 ,可 以 承 担 较 大 的 载 荷 ,同 时 制 造 容 易 、结 构 简 单 、 机 械 强 度 高 ,因 此 在 内 燃 机 、冲 压 机 床 及 其 他 机 械 中 有 广泛的应用。 本 文 利 用 MATLAB 软 件 中 的 SimMe- chanics模块进行系统建模,仿真分析研究典型的 偏 心 曲柄滑块机构的运动特性。 1 偏 置 曲 柄 滑 块 机 构 的 建 模 1.1 机 构 的 仿 真 框 图
位于同 一 直 线 上,且 与 x 轴 的 夹 角 为θ,B 点 位 置 为 (B_x,B_y),C 点位置为(C_x,C_y),机 架 最 右 端 位 置为(ground_x,ground_y),则编写初始位置 M 文件 如下:
%initial_position.m e=0; crank_length=0.4; rod_length=1.2; theta=asin(e/(crank_length+rod_length));% 计 算 偏 心 角 B_x=crank_length*cos(theta); B_y=-crank_length*sin(theta);%计算 C 点的坐标 C_x=rod_length*cos(theta);% 相 对 坐 标 C_y= -rod_length*sin(theta); ground_x=(crank_length+rod_length)*cos(theta);
摘要:基于 MATLAB 软件的 SimMechanics模块,建 立 了 偏 心 曲 柄 滑 块 机 构 的 通 用 仿 真 模 型 , 得 出 了 偏 心 距为零时滑块运动中的位移、速度和加速度变化曲线,并分析了不同偏心距对滑块运动速度和加速度的影 响。 关 键 词 : 曲 柄 滑 块 机 构 ; 偏 心 距 ;MATLAB;SimMechanics; 运 动 仿 真 中 图 分 类 号 :TH112∶TP391.9 文 献 标 识 码 :A
也 说 明 了 机 构 的 冲 击 增 大 ,速 度 波 动 逐 渐 变 大 。
图 2 曲 柄 滑 块 机 构 的 系 统 框 图
熿ml2 12
0
0燄
I= 0
ml2 12
0
。 …………………… (1)
0 燀
0
ml2 12燅
其中:m 为各杆的质量。
将数据代入式(1),分别可以求出 杆 AB、BC 以 及
滑块C 的惯性张量,并输入系统中。
图 1 偏 置 曲 柄 滑 块 机 构 示 意 图
1.3 偏 心 距 和 初 始 位 置 的 确 定 假设机构偏心距为e,在 初 始 状 态 下,曲 柄 和 连 杆
当改变偏心距时,只 需 修 改e 值 就 可 以 得 到 新 的 初 始 位 置 。 在 执 行 仿 真 时 ,在 命 令 行 输 入 Initial_posi- tion,则 相 关 参 数 由 系 统 自 动 计 算 得 出 。
偏心距的增加,速度 峰 值 略 有 增 加。 当t=2.21s时,
v =v e=0
偏置曲柄滑块 机 构 见 图 1,它 由 曲 柄 (杆 AB)、连 杆(杆 BC)以 及 滑 块 C 组 成,机 构 中 各 组 成 部 分 在 SimMechanics工具 箱 里 都 有 对 应 的 系 统 框 图。 选 择 合适的系统框图建立 该 机 构 的 机 械 模 型 图,如 图 2 所 示。其中,Ground模块用来确定机架 位 置;Joint模 块 中包含 Revolute和 Prismatic两 种 约 束,分 别 代 表 转 动副和移动副;Body 模 块 用 来 指 定 刚 体 的 属 性,如 惯 性张量、质 心 位 置 及 相 关 的 坐 标 系;Joint Actuator 和 Joint Sensor分 别 指 定 连 接 处 的 驱 动 和 传 感 器 。 1.2 机 构 尺 寸 和 惯 性 的 确 定