A320飞机惯性导航系统 校准 分析与维护
A320机型 第34章导航系统

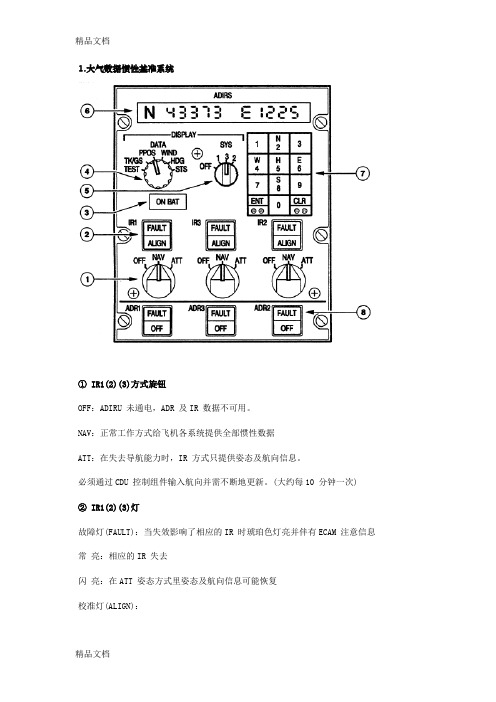
34章重点1. 在PFD上能看见高度、姿态、垂直速度、飞行速度、FMA(飞行方式指引)、航向;PFD上不能看见时间信息。
2. 无线电导航系统的调谐方式有3种,分别为:自动调谐方式(FMGC)、人工调谐方式(MCDU)、备用调谐方式(RMP)3. 两个FMGC都故障,导航台调节由RMP(备用方式)控制。
机长用RMP控制本侧导航,F/O一侧用RMP2控制。
4. DDRMI由ADIRU 1和ADIRU 3提供导航的显示数据信号,正常由1供,ATT切换电门可以切换到3号供。
5. 导航系统中显示磁航向的仪表是:PFD、ND、备用罗盘(ISIS)6. 备用高度表在高度低于1万时,左边鼓轮显示:黑色白色条纹。
7.无线电调谐的时候,FMGC 1坏了,FMGC2可自动调谐所有的导航收发机的频率。
MCDU可以人工调谐所有导航接收机频率。
FMGC1坏了,本身使用的A口就不能用了,可以通过RMP的A/B切换电门切换到B口,由FMGC2直接调谐。
(P68)正常情况下,本侧RMP只能调谐本侧。
7. 导航系统中有故障旗的系统是:备用地平仪。
8. ND显示正确的是:ADF的系统不在计划方式显示,ROSE有ILS,VOR,NAV三种方式。
10.PLAN方式以磁北方向为参考基准。
11. 什么时候热电瓶汇流条给ISIS供电?计算空速>50节,且DC ESSBUS失效的时候。
12. ISIS的空速数据来自于ADIRU 1和3,ISIS的ILS数据来自于MMR1。
13. ISIS在地面,同时按压BUGS和LS 2秒可以进入维护模式14. 白色校准灯闪烁表示:校准出现问题,如校准时移动,未输入经纬度等。
15. 惯导ADM,有3个全压(空速管3个),5个静压(静压口6个,两个备用的用1个ADM)16. 惯导2失效,ATC 2的气压高度数据来自于:ADIRU 3(将大气数据电门切换到F/O3,当源有问题的时候,只能人工切换,不能自动切换)17. SD上的总温信息来自ADIRU1或者3。
无人机惯性导航系统安全操作及保养规程

无人机惯性导航系统安全操作及保养规程1. 引言无人机在军事、民事领域逐渐得到广泛应用。
无人机的惯性导航系统是保证无人机准确导航和控制的关键组成部分。
为了保证无人机的顺利运行和飞行安全,本文将介绍无人机惯性导航系统的安全操作及保养规程。
2. 安全操作规程2.1 预飞准备在每次飞行任务之前,必须进行充分的预飞准备工作: - 确保无人机惯性导航系统的正常运行状态。
- 检查电池电量,确保电量充足。
- 检查无人机飞行器结构,确保无损伤和松动部件。
- 确保飞行环境安全,包括天气、空域限制、地形条件等。
2.2 惯性导航系统操作在操作无人机并使用惯性导航系统时,需要遵守以下规程: - 确保无人机在飞行过程中平稳运行,避免剧烈摇摆和急速转向。
- 定期校准惯性导航系统,以提高导航精度和稳定性。
- 避免在磁性干扰源附近飞行,以免影响惯性导航系统的正常工作。
- 在惯性导航系统出现故障或异常时,立即停止使用,确保飞行安全。
2.3 飞行监控与数据分析在飞行过程中,应密切监控无人机的状态和惯性导航系统的运行情况: - 实时监测无人机的飞行高度、速度、姿态角等参数。
- 使用飞行监控软件对无人机飞行轨迹和姿态进行记录和分析。
- 分析惯性导航系统输出的数据,评估飞行性能和导航精度。
3. 保养规程为了保证无人机惯性导航系统的长期使用和性能稳定,需要按照以下保养规程进行维护和保养: ### 3.1 清洁与防尘无人机惯性导航系统应定期进行清洁和防尘处理,包括: - 使用干净的软布擦拭无人机表面和惯性导航系统部件。
- 避免使用带有化学溶剂的清洁剂,以防损坏系统部件。
- 定期检查无人机结构和惯性导航系统部件是否有积尘,及时清理。
3.2 定期校准与测试为保证惯性导航系统的精度和稳定性,定期校准与测试是必要的:- 遵循制造商提供的校准和测试程序,定期校准惯性导航系统。
- 校准过程中应采取严谨的环境控制措施,避免干扰和误差。
- 校准后进行系统测试,确保各项参数和功能正常。
导航工程技术专业实操惯性导航系统的调试与校准
导航工程技术专业实操惯性导航系统的调试与校准导航工程技术专业的学生在实际操作中需要了解和掌握惯性导航系统的调试与校准方法。
惯性导航系统是一种重要的导航设备,利用加速度计和陀螺仪等传感器来测量和计算飞行器、船舶或车辆的速度、角度和位置。
它具有自主性强、精度高、适应性广等特点,在航空航天、海洋探测、导弹制导等领域具有广泛的应用。
一、惯性导航系统调试惯性导航系统调试是指在系统安装和运行之前,通过连接、设置和调试各个组件,确保系统的正常工作。
惯性导航系统由加速度计、陀螺仪和信号处理单元组成。
在调试过程中,首先要连接各个组件,并正确接入电源。
接下来,需要进行系统状态检测,确保各个传感器工作正常。
接着,进行信号质量检测和噪声检测,保证信号的准确度和稳定性。
最后,进行系统校准和标定,以提高系统的精确度和可靠性。
二、惯性导航系统校准惯性导航系统的校准是为了消除或校正传感器误差、提高导航系统的精密定位能力。
校准分为静态校准和动态校准,其中静态校准又包括零偏校准和刻度因子校准。
1. 零偏校准零偏是指传感器输出在无输入或无运动状态下的非零输出。
在静态校准时,需要将传感器置于无运动状态,并记录输出的零偏值。
通过零偏校准可以消除传感器的初始误差,提高测量准确度。
2. 刻度因子校准刻度因子是指传感器输出与实际输入之间的比例关系。
在静态校准中,通过施加已知幅值的输入信号,并记录传感器输出,可以计算刻度因子。
刻度因子校准可以修正传感器的放大倍数偏差,提高测量的准确性。
3. 动态校准动态校准是在运动状态下进行的校准。
通过在不同方向上的加速度和角速度变化,在运动过程中校准惯性导航系统。
动态校准可以消除因惯性导航系统在实际应用中遇到的运动误差和地球自转效应等因素对导航精度的影响。
三、惯性导航系统调试与校准注意事项在进行惯性导航系统调试与校准时,需要注意以下事项:1. 环境干净静止:避免外界干扰和仪器漂移,确保数据的可靠性和准确性。
2. 合理选择校准模式:根据实际应用需求,选择静态校准或动态校准。
(整理)空中客车A320顶板各项介绍
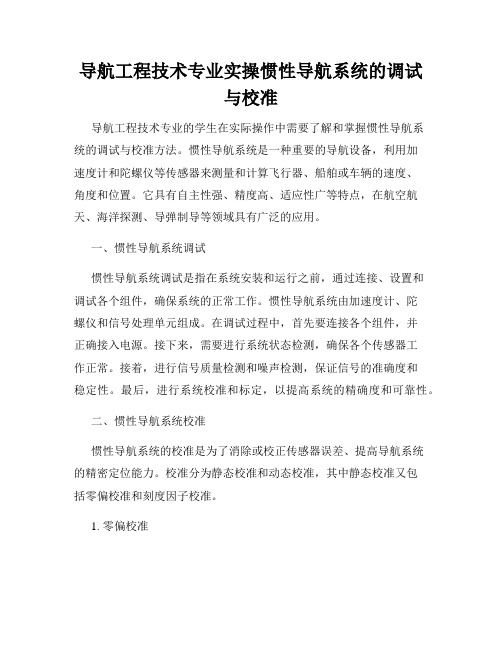
1.大气数据惯性基准系统① IR1(2)(3)方式旋钮OFF:ADIRU 未通电,ADR 及IR 数据不可用。
NAV:正常工作方式给飞机各系统提供全部惯性数据ATT:在失去导航能力时,IR 方式只提供姿态及航向信息。
必须通过CDU 控制组件输入航向并需不断地更新。
(大约每10 分钟一次)② IR1(2)(3)灯故障灯(FAULT):当失效影响了相应的IR 时琥珀色灯亮并伴有ECAM 注意信息常亮:相应的IR 失去闪亮:在ATT 姿态方式里姿态及航向信息可能恢复校准灯(ALIGN):常亮:相应的IR 校准方式正常工作闪亮:IR 校准失效或10 分钟后没有输入现在位置,或关车时的位置和输入的经度或纬度差超过1度时熄灭:校准已完毕③电瓶供电指示灯仅当1 个或多个IR 由飞行电瓶供电时,琥珀色灯亮。
在校准的开始阶段。
但不在快速校准的情况下它也会亮几秒钟。
注:当在地面时,至少有一个ADIRU 由电瓶供电的情况下:·一个外部喇叭响·一个在外部电源板上的ADIRU 和AVNCS 蓝色灯亮④数据选择钮该选择钮用来选择将显示在ADIRS 显示窗里的信息测试:输入(ENT)和消除(CLR)灯亮且全部8 字出现TK/GS:显示真航迹及地速PPOS:显示现在的经纬度WIND:显示真风向及风速HDG:显示真航向和完成校准需要的时间(以分为单位)STS:显示措施代码⑤系统选择钮OFF:控制及显示组件(CDU)没有通电。
只要相关的IR 方式选择器没有在OFF(关)位ADIRS 仍在通电状态。
1.2.3:显示选择系统的数据⑥显示显示由数据选择器选择的数据键盘输入将超控选择的显示⑦键盘允许现在位置或在姿态(ATT)方式里的航向输入到选择的系统里字母键:N(北)/S(南)/E(东)/W(西)作为位置输入。
H( * )作为航向输入(ATT 方式)数字键:允许人工输入现在位置(或姿态方式里的磁航向)CLR (消除)键:如果数据是一个不合理的值,输入后综合提示灯亮。
导航工程技术专业实操惯性导航系统的误差分析与校正方法探究
导航工程技术专业实操惯性导航系统的误差分析与校正方法探究导航工程技术专业实操:惯性导航系统的误差分析与校正方法探究随着现代导航技术的快速发展和广泛应用,惯性导航系统在航空、航海、地面车辆等领域中扮演着重要的角色。
然而,由于各种原因,惯性导航系统在实际应用中难免会产生一定的误差,因此,学习误差分析与校正方法成为导航工程技术专业的必修内容。
本文将对惯性导航系统的误差来源、误差分析方法以及误差校正方法进行探究和总结。
一、误差来源分析惯性导航系统的误差来源复杂多样,主要包括器件固有误差、测量误差和环境误差等。
器件固有误差主要指惯性测量单元(IMU)中的陀螺仪零偏、比例因素误差以及加速度计安装误差等。
测量误差包括各类传感器的随机误差和系统偏差,例如传感器的量程不确定性和非线性等。
环境误差主要指温度变化、振动和加速度的不均匀性等对导航系统性能产生的影响。
二、误差分析方法为了准确地分析惯性导航系统的误差,工程技术人员通常采用以下两种方法:定态误差分析和动态误差分析。
1. 定态误差分析定态误差分析方法主要通过在不同工作状态下对系统进行测试,统计并分析其误差特性。
具体步骤如下:首先,对系统进行静态校准,获取系统在各参数状态下的误差特性曲线;其次,根据实测数据,利用统计学方法对误差进行分析,包括误差均值、标准差等参数的计算;最后,通过建立数学模型,对定态误差进行综合分析,找出误差随参数变化的规律。
2. 动态误差分析动态误差分析方法主要通过对系统在不同运动条件下的实测数据进行分析,确定误差的变化规律和影响因素。
具体步骤如下:首先,选择不同运动模型,例如匀速、加速度等,设计实验方案并采集数据;其次,通过数据处理方法,对误差进行分析和提取,包括误差漂移速率、相关性等参数的计算;最后,根据误差分析结果,优化系统设计和算法,减小误差对导航精度的影响。
三、误差校正方法误差校正是提高惯性导航系统精度的关键环节,校正方法的选择和优化对于系统的性能至关重要。
A320机型第34章导航系统
34章重点1.在PFD上能看见高度、姿态、垂直速度、飞行速度、FMA(飞行方式指引)、航向;PFD上不能看见时间信息。
2.无线电导航系统的调谐方式有3种,分别为:自动调谐方式(FMGC)、人工调谐方式(MCDU)、备用调谐方式(RMP)3.两个FMGC都故障,导航台调节由RMP(备用方式)控制。
机长用RMP控制本侧导航,F/O一侧用RMP2控制。
4.DDRMI由ADIRU 1和ADIRU 3提供导航的显示数据信号,正常由1供,A TT切换电门可以切换到3号供。
5.导航系统中显示磁航向的仪表是:PFD、ND、备用罗盘(ISIS)6.备用高度表在高度低于1万时,左边鼓轮显示:黑色白色条纹。
7.无线电调谐的时候,FMGC 1坏了,FMGC2可自动调谐所有的导航收发机的频率。
MCDU可以人工调谐所有导航接收机频率。
FMGC1坏了,本身使用的A口就不能用了,可以通过RMP的A/B切换电门切换到B口,由FMGC2直接调谐。
(P68)正常情况下,本侧RMP只能调谐本侧。
7.导航系统中有故障旗的系统是:备用地平仪。
8.ND显示正确的是:ADF的系统不在计划方式显示,ROSE有ILS,VOR,NA V三种方式。
10.PLAN方式以磁北方向为参考基准。
11.什么时候热电瓶汇流条给ISIS供电?计算空速>50节,且DC ESS BUS失效的时候。
12.ISIS的空速数据来自于ADIRU 1和3,ISIS的ILS数据来自于MMR1。
13.ISIS在地面,同时按压BUGS和LS 2秒可以进入维护模式14.白色校准灯闪烁表示:校准出现问题,如校准时移动,未输入经纬度等。
15.惯导ADM,有3个全压(空速管3个),5个静压(静压口6个,两个备用的用1个ADM)16.惯导2失效,A TC 2的气压高度数据来自于:ADIRU 3(将大气数据电门切换到F/O3,当源有问题的时候,只能人工切换,不能自动切换)17.SD上的总温信息来自ADIRU1或者3。
机组秋季检修报告的导航与通信系统检测与校准
机组秋季检修报告的导航与通信系统检测与校准导航与通信系统在航空中扮演着至关重要的角色。
为确保飞行的安全与顺利进行,机组在秋季检修中对导航与通信系统进行了全面的检测与校准工作。
本报告将对这一过程进行详细的描述与分析。
一、导航系统检测与校准导航系统是飞行过程中的重要支撑,它包括惯性导航系统(INS)、全球卫星导航系统(GNSS)以及雷达高度测量仪(RAI)。
为确保导航系统的准确性和可靠性,机组进行了以下步骤:1. 惯性导航系统检测与校准惯性导航系统是导航系统的核心组成部分,对其进行检测与校准至关重要。
检测程序包括检查惯性导航系统的硬件设备是否正常工作,以及验证其数据输出的准确性。
校准程序则包括对惯性导航系统进行初始校准和定期校准,以确保其在飞行过程中的准确导航。
2. 全球卫星导航系统检测与校准全球卫星导航系统能够提供高精度的导航定位服务,在飞行中起到至关重要的作用。
机组对全球卫星导航系统进行了检测与校准,以验证其接收卫星信号的质量和准确性。
校准工作主要包括接收机的位置校准和时间校准,以确保导航信息的准确性。
3. 雷达高度测量仪检测与校准雷达高度测量仪能够提供飞机相对于地面的高度信息,对于飞行的安全至关重要。
机组对雷达高度测量仪进行了检测与校准,以确保其高度测量的准确性和可靠性。
校准主要包括对测量仪的故障排除和校准参数的调整工作。
二、通信系统检测与校准通信系统在飞行中用于与地面控制台、其他飞机以及天气服务提供商进行通信。
为确保通信系统的正常运行,机组进行了以下步骤:1. 语音通信系统检测与校准语音通信系统是飞行员与地面控制台、其他飞机的主要通信手段。
机组对语音通信系统进行了检测,包括对麦克风、扬声器以及连接线路的检查。
校准工作主要包括音量的调整和频率的校准,以确保通信的清晰和有效进行。
2. 数据通信系统检测与校准数据通信系统用于飞机与天气服务提供商之间的通信和数据交换。
机组对数据通信系统进行了检测,包括对数据链路的配置和连接状态的检查。
A320仪表指示导航相关问题
北纬73°以上,西经90°和120°之间(磁极区)
南纬60°以上
12.这是今天的第一班飞行,飞机通电后如何进行惯导校准?
飞机停住
将ADIRS方式选择旋钮设置到NAV位
输入当前的位置
MCDU INT A页面
ADIRS控制面板上的小键盘
13.在IR完全校准过程中,ON BAT灯亮了,表示什么?
IRS—GPS
IRS--DME/DEM
IRS--VOR/DME
仅IRS
在盲降进近期间,系统使用下列方式之一进行暂时的水平更新:
IRS—GPS/LOC
IRS—DME/DME—LOC
IRS—VOR/DME—LOC
IRS—LOC
11.A320上有几部ADIRU?每部ADIRU包含哪些部分?
(1.34.10 P1)
16.完成一次完全校准需要多长时间?快速校准呢?
完全校准:大约10分钟
快速校准:大约30S
(3.04.34 P7)
17.哪里可以看到IR校准的剩余时间?
E/WD的备忘信息栏:>7分钟
1分钟最小单位,如果还没校准好,定在1分钟。
ADIRS控制面板的显示窗(DATA方式选择HDG)
18.气象雷达有什么作用?如何正确的使用气象雷达控制面板?
对于其他航班,如果剩余地速大于5节,进行快速校准。如果剩余地速小于5节,则不需要校准
快速校准程序:
三部ADIRS控制面板上的IR方式选择器------------------------OFF
5S之内三部ADIRS的IR方式选择器-----------------------------NAV
输入当前位置
只要超出极限,该数值绿色闪动
(完整版)A320-CFM56-5B-VBV系统维护总结

VBV故障分析CFM56-5B发动机尽管总体性能较好、可靠性高,但是使用过程中也出现了一些问题。
据统计,VBV系统故障是目前公司的一个较大的问题。
VBV的故障主要有哪些呢?下面就让我们来看看!VBV系统常见的故障有:燃油齿轮马达漏油活门卡阻(止动机构卡阻)柔性轴打滑或被剪切断1.燃油齿轮马达漏油根据CFM I给出的资料看出燃油渗漏是由于发动机原因导致航班延误和取消的首要因素。
在冬天过夜后或当天第一次启动冷发启动时发动机底部余油处,漏油比较厉害,甚至形成喷射状。
根据手册我们可以制作出如下图的一个故障分析树。
故障分析:CFM56-5B的VBV活门是处于全关位的(为防止在维修发动机时,工具从VBV活门掉入发动机,造成不必要的延误或换发),而发动机在启动时由于转速较低,对空气的压缩能力较小,所以高压压气机的空气流量不能过大,否则会造成压气机喘振甚至有可能放炮,这样就要求VBV必须处于全开位,好让多余的空气流走,所以要求VBV活门能够迅速地打开,这样要求燃油齿轮马达有较大的动力,也就要求作动燃油齿轮马达的燃油有很大的压力。
当发动机冷发启动时,尤其是在冬天的时候,外间大气温度较低,如果发动机这时是冷发时,燃油齿轮马达里的橡胶密封圈就会有较大的收缩,虽然流过的燃油有较高的温度,但还是不能使密封圈完全膨胀,使得密封圈与壁面存在一定的间隙,就会使得高压的燃油从这些间隙挤出来,从余油口流出。
所以CFM I建议暖车5分钟,让燃油与封圈充分的热交换,达到完全膨胀,起到密封作用,这样就不会漏油了!说明这是一种正常的现象,但发动机在5分钟以后还有余油的话就应该注意了。
因为燃油齿轮马达也可能由于磨损导致漏油。
同时颤振导致轴承油膜受到破坏,当大运动量时油膜厚度不够,导致磨损和过热。
齿轮马达过度磨损的主要原因急促的小排量震动(颤震)阻止了大排量运动所需要的液压动力膜支撑及冷却作用的产生,这会导致:- 在齿轮表面和轴承板之间过度磨损- 轴承磨损并过热- 主轴封严磨损(碳封严头部)目前的FADEC软件已加入VBV颤震衰减逻辑, 应能够减轻齿轮马达和其它VBV系统部件的磨损:- 5BI for CFM56-5B/P (SB 73-063 - 1999)排故建议:在上CFM56-5B航线维护课程时,敖良忠老师给出的个人建议是:在发动机启动后,待稍微稳定一下,来回轻轻地动几下油门,让燃油的热量迅速地传给密封圈,让马达迅速达到热平衡。
导航工程技术专业实操惯性导航系统的误差分析与校正
导航工程技术专业实操惯性导航系统的误差分析与校正导航工程技术专业涉及到许多重要的导航系统,其中之一就是惯性导航系统。
惯性导航系统是一种可以独立运行的导航系统,通过测量和计算物体的加速度和角速度来确定位置和方向。
然而,惯性导航系统存在着一定的误差,这些误差需要进行分析和校正,以确保导航的准确性和可靠性。
一、误差来源与分类惯性导航系统的误差主要来自于两个方面:传感器误差和初始值误差。
传感器误差是由于惯性传感器本身的不完美性能引起的,包括随机误差和系统误差。
随机误差是在测量中出现的偶然误差,一般可通过多次测量求平均值来减小;系统误差是固定的、与物理因素相关的常数误差,一般可通过校正来减小。
初始值误差是由于系统初始状态的不准确引起的,包括位置误差和姿态误差。
二、误差分析1.传感器误差分析传感器误差是惯性导航系统中最主要的误差来源之一。
对于加速度计和陀螺仪这两种常用的传感器,需要对其误差进行分析和研究。
加速度计的误差主要包括刻度因子误差、偏置误差和温度误差等。
陀螺仪的误差主要包括零偏误差、刻度因子误差和温度误差等。
通过实验和数据处理,可以确定传感器误差的大小和特征,并为后续的误差校正提供依据。
2.初始值误差分析初始值误差是惯性导航系统中由于初始状态不准确引起的误差。
对于位置误差,可以通过其他导航系统的辅助定位来进行校正。
例如,可以利用全球定位系统(GPS)提供的位置信息来校正初始位置误差。
对于姿态误差,可以利用陀螺仪提供的角速度测量值来进行校正。
通过比较惯性导航系统的测量结果与辅助定位系统的结果,可以计算出初始值误差,并进行修正。
三、误差校正方法误差校正是惯性导航系统中非常重要的一步,它可以通过多种方法来实现。
常用的误差校正方法包括零偏校正、温度校正、刻度因子校正等。
零偏校正是通过对传感器的输出进行标定,确定其零偏值,并在测量中进行相应的修正。
温度校正是通过对传感器输出的温度特性进行建模,校正温度引起的误差。
A320机型3D机务维护模拟机故障排除方法及使用问题研究
总633期第三期2018年3月河南科技Henan Science and TechnologyA320机型3D机务维护模拟机故障排除方法及使用问题研究胡健翔(广州民航职业技术学院实训基地,广东广州510470)摘要:随着民航业的不断发展,各类机型的模拟机被各大航空公司引进机型培训中,但目前,模拟机在使用中尚存在一些问题和缺陷。
本文基于A320机型机务维护模拟机的实际使用经验,提出该类型模拟机在飞机故障排除中的一般思路,探讨在使用该模拟机时产生的问题,并针对这些问题提出有效的解决方案,以提高模拟机的使用效率。
关键词:机务维修;A320型3D机务维护模拟机;故障排除中图分类号:V267文献标识码:A文章编号:1003-5168(2018)07-0127-02 Study on Troubleshooting Method and Application of A320Model3D Locomotive Maintenance SimulatorHU Jianxiang(Guangzhou Civil Aviation College Training Base,Guangzhou Guangdong510470)Abstract:With the continuous development of the civil aviation industry,various types of simulator have been introduced into the training of large airlines,but at present,there are still some problems and short⁃comings in the use of simulator.In this paper,the actual experience of using A320type maintenance simu⁃lator based on this general idea of the type of simulator in aircraft troubleshooting,to produce in the use of the simulator to the problem,and proposed effective solutions to solve these problems,in order to im⁃prove the efficiency of the use of simulation machine.Keywords:aircraft maintenance;A320maintenance-oriented simulator;troubleshooting随着民航业的不断发展,全世界民航飞机数量不断增多,民航界对飞机机务的维修水平提出了更高的要求。
民用飞机惯性基准导航系统校准分析

民用飞机惯性基准导航系统校准分析惯性基准导航系统是民用飞机中最重要的机载系统之一,该系统为飞机的显示系统、飞行控制系统等多个系统提供飞机的飞行姿态、航向、加速度等信息,其准确性对飞机的安全稳定飞行具有不可替代的作用。
文章对民用飞机惯性基准导航系统的结构以及系统的校准进行了研究,希望能够给民航机务维护的工作提供一定的参考。
标签:民用飞机;惯性基准系统;校准1 民用飞机惯性基准导航系统组成惯性基准导航系统是近几年发展起来的新型惯性导航系统。
该系统具有体积小、质量轻、可靠性高等特点,能够通过飞机主控中心总线系统向主控中心输出飞机的姿态、航向、加速度等信息。
惯性基准导航系统主要由惯性基准装置(IRU)、飞机个性化模块(APM)以及安装托架三个部分构成[1]。
其中IRU是惯性基准导航系统中最重要的部分,它包含了所有惯性测量元件以及计算功能,而APM则主要用于存储IRU的安装校准数据、飞机的具体型号等方面的数据,这样能够在更换IRU部件之后,直接读取数据,而无需从新对IRU装置进行校准。
每套惯性系统均有两种工作方式,分别为导航方式和姿态方式,其中导航方式是系统的正常工作方式,在此种工作方式下,惯性基准导航系统能够向飞机的控制中心提供全部导航参数;而姿态方式则是在飞机的系统导航功能失效之后所进行的一种降低精度的工作方式,此时,系统只能向飞机控制中心提供包括姿态和航向等的少量数据信息。
2 民用飞机惯性基准导航系统的校准2.1 正常校准飞机在停靠地面通电之后,将惯性导航控制显示组件上的工作方式按钮从OFF状态拨出置为NA V状态,系统会自动在5秒钟的电瓶测试之后进入到正常校准的状态中,此时,控制显示组件上的“ALIGN(校准)”灯会稳定的点亮,飞机中央电子监控显示屏中会显示“IRSIN ALING >7”的信息提示。
此时大气数据基准组件提供的计算空速、垂直速度以及气压高度数据会在正、副驾驶员位的主飞行显示器上进行显示[2]。
A320飞机惯性导航系统校准分析与维护

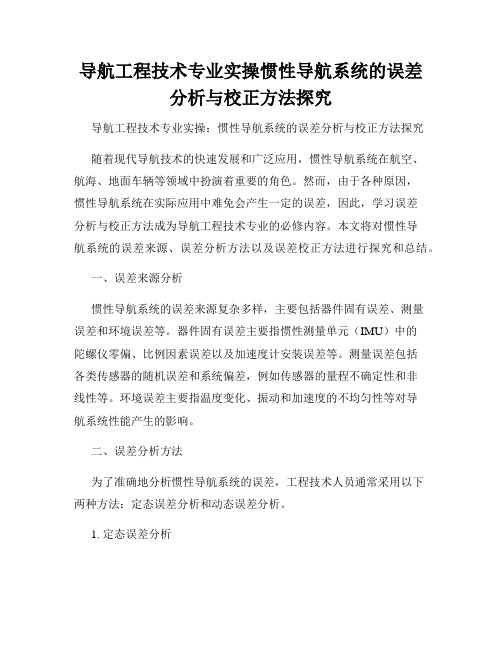
A320飞机惯性导航系统校准分析与维护e=U y / (K y -g ) (2)利用横向加速度计测星飞机的倾斜角与上同理,飞机停在地面上,倾斜角为Y、俯仰角为0时,重力加速度g沿飞机横轴的分厳g siny 被横向加速度计敏感到,输出伯号Ux则U x =K x -g -siny (K x为横向加速度计比例系数)。
当倾斜角Y很小时,sin仟Y(Y单位为弧度)。
Y=U x / (K x ・g)当飞机既有俯仰又有倾斜时,用上述公式测得的俯仰角为飞机真实俯仰角,测得的倾斜角为飞机非真实倾斜角(真实俯仰角为飞机纵轴与水平面之间的夹角,非真实倾斜角为飞机横轴与水平面之间的夹角)•30秒后.飞机的俯仰角和倾斜角被计算出来.正、副驾驶位的PFD上姿态旗消失,飞机符号及空地球出现,俯仰、倾斜刻度及指示被显示。
2. 陀螺•罗盘(或方位角)处理及水平精校准此阶段至少需要9分30秒,主要用于测量飞机的真航向角,并使用地球自转角速度的垂直分量计算出飞机所在处的纬度。
(1)克航向角的测定假定飞机停在地面上,俯仰角.倾斜角均为0,真航向角为屮,飞机所在处纬度为由于飞机停在地面上,随地球一起自转,其自转角速度等于地球自转角速度3e (we为佔度 /小时),cue在飞机所在处水平面上的水平分S w e cosO 在当地地垂线上的垂直分最为3 e・sin0)。
水平分量3 e cosO又可以分解为沿飞机纵轴的分塑3 e cos(P cos^P和沿飞机横轴的分量3 e cos0)sin屮垓这二个分量分别被纵向陀螺及横向陀螺所敏感,输出信号V y和V x则V y = L y ・3 y = L y ・3 e •cosO cos屮V X =L X・3X =L X・3e -cosOsin 屮(Ly为纵向陀螺比例系数.L x为横向陀螺比例系数)。
V x / V y = L x / L y ・tg屮屮—arctg[(Vx -L y )/(V y ・L x)](2)飞机所在处纬度的测定由上可知,垂宜分*u)e sin<P可被垂宜陀螺敏感到,输出信号VZ则VZ = LZ -u> e sinO (L Z为垂直陀螺比例系数)<t>c a 1 =arcsin[V Z /(L Z ・ e )]考虑到飞机停放时,e. Y不一定为牢,故上述所得w、OC a 1为近似值。
A320系统知识普
在进一步介绍FM部分的功能之前,我们先了解一下飞机的位置计算方法.飞机导航系统最主要的目的之一就是确定飞机的位置。
目前A320系列飞机机载导航系统有三种,即惯性导航系统(IRS)、无线电导航系统RNAV和GPS,每种导航系统都能计算出各自的飞机位置,而最终显示在ND上的飞机位置由FM计算完成。
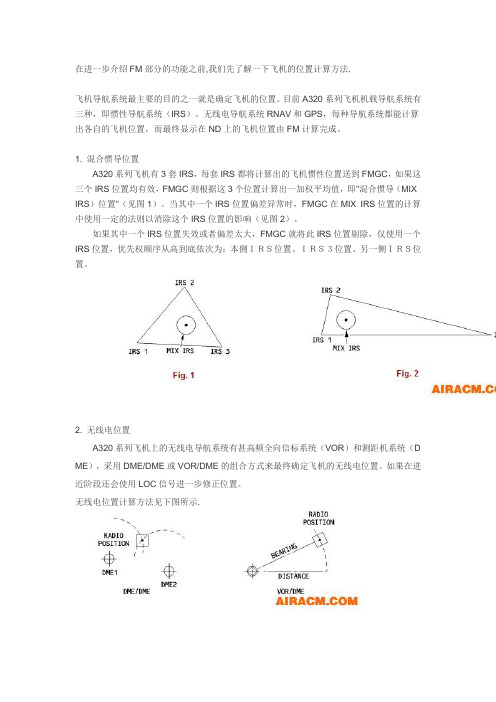
1. 混合惯导位置A320系列飞机有3套IRS,每套IRS都将计算出的飞机惯性位置送到FMGC,如果这三个IRS位置均有效,FMGC则根据这3个位置计算出一加权平均值,即"混合惯导(MIX IRS)位置"(见图1)。
当其中一个IRS位置偏差异常时,FMGC在MIX IRS位置的计算中使用一定的法则以消除这个IRS位置的影响(见图2)。
如果其中一个IRS位置失效或者偏差太大,FMGC就将此IRS位置剔除,仅使用一个IRS位置,优先权顺序从高到底依次为:本侧IRS位置、IRS3位置、另一侧IRS位置。
2. 无线电位置A320系列飞机上的无线电导航系统有甚高频全向信标系统(VOR)和测距机系统(D ME),采用DME/DME或VOR/DME的组合方式来最终确定飞机的无线电位置。
如果在进近阶段还会使用LOC信号进一步修正位置。
无线电位置计算方法见下图所示.3.GPS位置A320系列飞机有2套GPS系统,GPS接收机在MMR1和2中.在接收到GPS信号后, 空客的飞机有两种计算方法AUTONOMOUS和HYBRIDAUTONOMOUS方式用于A300机型,MMR把GPS数据直接送到FMS,结合ADIRU送来的IRS位置计算飞机的混合位置.HYBRID用于A320,330等新机型, MMR把GPS数据送到ADIRU,由ADIRU来计算出各自的混合GPIRS数据后,送到FMS选择相应数据.4.FM位置飞机的FM位置即是FMGC在ND上用来显示的当前飞机的位置。
正常情况下,FM1位置在ND1上显示,FM2位置在ND2上显示。
A320仪表指示导航相关问题
当APU主电门在ON位时,APU页面出现。APU转速>95% 10S时,或当APU主电门在OFF位时,APU页面消失。
在启动顺序开始或选择冷转(CRANK)时出现ENGINE页面。在启动顺序结束10S且发动机方式选择在正常位时,该页面消失。
下滑道方式按钮:下滑道方式受到抑制
襟翼方式按钮:襟翼方式受到抑制。(在减小襟翼调定值的情况下着陆时使用,避免烦人的警告)
着陆襟翼3按钮:当选择FLAPS CONF3时,襟翼方式被抑制。同时在LDG MEMO里显示FLAPS…..3而不是CONF….FULL。
地形按钮:
OFF:意识显示(TAD)地形间隔平台(TCF)方式,但不影响GPWS基本方式1至5.
(1.34.10 P5)
ON BAT(电瓶供电指示灯)
仅当一个或多个IR由电瓶供电时,琥珀色灯亮。在校准的开始阶段也会亮几秒钟,快速校准时不会亮。
注:当在地面时,至少一个ADIRU由电瓶供电的情况下:
一个外部喇叭响
一个在外部电源面板上的ADIRU和AVNCS琥珀色灯亮
14.白色的ALIGN灯亮表示什么?闪亮和熄灭又分别表示什么?
如果飞机下降低于此平台,就会发出TOO LOW TERRAIN(太低地形)音响警告,且遮光板上的按钮灯也会亮。
22.GPWS/EGPWS控制面板如何使用?
(1.34.70 P11)
系统按钮:FAULT(故障灯)基本的GPWS方式1到5故障时,琥珀色故障灯亮并伴有ECAM信息。
注:如果ILS1失效,只有方式5受到抑制。所以,故障灯不亮,也不触发GPWS FAULT警告。
A320机队常见故障和处理方法
A320机队常见故障和处理方法< xmlnamespace prefix ="o" ns="urn:schemas-microsoft-com:office:office" />21章1:电子舱通风故障:1)如只有电子舱通风的故障警告,须检查蒙皮进气活门和出气活门,确认开度正常,进出气量正常,进气口无外来物。
复位计算机跳开关(MONG),一般信息会消失,等一分钟左右后做测试,如立即测试可能会出现虚假的测试正常信息。
如果过一会信息再次出现,可能性最大的是气滤,其次是计算机。
2)如出现鼓风扇或排气扇信息,检查是否有相关跳开关跳出。
检查蒙皮进气口,如有杂物堵塞,会出现鼓风扇信息。
否则出现此类信息,一般复位是无效的,只能按MEL保留或排故。
3)注意:鼓风扇故障可能会导致同时出现排气扇信息。
如果电源电压,频率偏离较大也可能会导致多个电子舱通风跳开关跳出,信息出现。
2:空调系统:1)温度不可调节,可考虑区域温度控制器。
但如果是温度高,降不下来,则控制器的可能性很小,一般是组件性能问题,短停不处理,但要打印环境报告给技术部门。
2)单组件故障,可按要求保留。
3:座舱压力系统:1)A319飞机有时在报告中有CPC1+2故障警告。
这一般是由于有时机组在执行高原航班时会选择人工控制模式造成的,在地面正常就不用处理。
4:后货舱通风或加温故障:复位不好则保留。
不允许防活物。
22章1:与FMGC相关的:1)通电后FD不能自动接通:说明FMGC自检或数据对比没有通过,哪边的不能接通,在其ND下方会提示选择与另一部ND相同的距离范围,一般复位相应的FMGC后会正常。
2)校准惯导后某部FD或AP接不通,先复位跳开关,如无效,对老320飞机的FMGC可进行拔卡复位,拔出跳开关,拔出A13卡,闭合跳开关,一分钟后再拔出跳开关,插入卡,闭合跳开关。
一分钟后信息消失。
如还不行,MEL保留(该方法在第一种情况下也适用)。
飞机惯性导航部件安装及校准研究

飞机惯性导航部件安装及校准研究摘要:本文将围绕飞机惯性导航(简称惯导)部件安装及校准进行分析讨论,利用局域GPS完成不确定度的测量分析,以此满足惯导安装要求,通过建模手段探究局域GPS的测量精度。
根据实际结果显示,测量精度与激光发射器的姿态、信号数量以及位置等因素有关,若发射器之间的距离不超过20m,测量方位角在10~70度之间,此时采用局域GPS可以保证极高的测量精确性。
关键词:飞机惯性导航部件;激光发射器;GPS引言:飞机惯性导航部件的安装校准精确性,会直接决定惯导系统的应用性能,以往的惯导安装校准方法,大多采用电子经纬仪以及安装校准夹,但此类方法耗时较高,且无法保证精度,因此已不适用新飞机的研制要求。
而局域GPS则属于一种高精度数字化技术,与传统激光跟踪仪等测量技术相比,不仅可以省略坐标系转换,还能降低转站误差,可以结合不同测量对象进行测量场的灵活布置。
因此,笔者将基于局域GPS,深入探究飞机惯性导航部件的安装与校准方法。
一、飞机惯性导航部件安装及校准分析局域GPS可通过获取传感器被测点坐标值,接收激光发射器信号,来收集测量点仰角与方位角。
若能够确定不同激光发射器的位置关系,便可利用激光发射器信号,测量被测点空间坐标值。
(一)测量点布设通常来说测量点可分为以下两种形式:一是圆柱传感器,需安装在测量点上实现自动测量;二是利用手持测量杆实现测量点的手动测量。
前者在使用时需要将被测点选在螺纹孔上,以便后续传感器的安装,而后者只需利用手持式测量杆测量被测点即可,该方法的测量更为简洁且效率更高。
为此,笔者将采用手动测量的方法,依照惯导安装校准的位置特点,在辅助校准平板上布置多个测量点,之后利用相关公式计算安装校准时的平板横滚、俯仰安装角误差[1]。
设三个测量点的坐标依次为:(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),则计算公式为:其中Wx、Wy、Wz分别代表辅助平板横滚、航向与俯仰方向的角度误差。
国航A320系列 RA维护总结
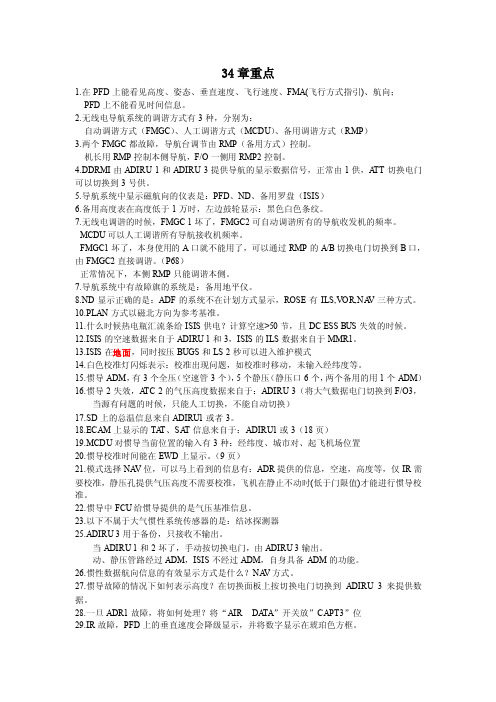
无线电高度显示在姿态 球正下方,显示低于 2500ft的高度
下降到低于500ft时,在 高度刻度右下方出现一 根红色竖条,随着高度 降低逐渐升起
下降到低于300ft时,姿 态球下部出现一条白色 地面线逐渐上升
交联系统
1.DMC 发送高度数据到DMC以显示在PFD上 2.EGPWS 根据无线电高度,在不同情况下产生各种方式的近地警告
3.TCAS 利用无线电高度表信息自动调节灵敏度等级
4.FWC 下降到400ft时,FWC产生语音读数报告不同阶段高度值 5.WXR 低于2300ft时自动开启风切变探测
RCTPN 2 ANNTENA -5SA2
XMSN 2 ANNTENA 6SA2
XMSN 1 ANNTENA 6SA1
RCTPN 1 ANNTENA -5SA1
RA维护总结
系统简介
RA(Radio Altermeter)是测量飞机到地面的真实 高度,通过发射特定调频的无线电波向地面,并接 收地面的反射波,计算两。320系列飞机上装 有两套无线电高度表,每套系统由收发组、接收天 线、发送天线、风扇组成。目前我们所执管飞机安 装的是LRA-900型无线电高度表,工作范围-15ft到 5000ft,工作频率4300MHZ。
ra维护总结无线电高度显示在姿态球正下方显示低于2500ft的高度下降到低于500ft时在高度刻度右下方出现一根红色竖条随着高度降低逐渐升起下降到低于300ft时姿态球下部出现一条白色地面线逐渐上升1dmc发送高度数据到dmc以显示在pfd上2egpws根据无线电高度在不同情况下产生各种方式的近地警告3tcas利用无线电高度表信息自动调节灵敏度等级4fwc下降到400ft时fwc产生语音读数报告不同阶段高度值5wxr低于2300ft时自动开启风切变探测rctpnanntena5sa1rctpnanntena5sa2xmsn6sa1xmsn
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A320飞机惯性导航系统校准分析与维护A320飞机惯性导航系统校准分析与维护惯性导航是指利用惯性敏感元件测量航行体相对于惯性空间的线运动和角运动参数,在给定初始条件的情况下,由计算机推算出航行体的姿态、方位、速度、位置等导航参数,以引导航行体完成预定航行任务。
这种建立在牛顿力学基础上的导航方法不依赖于任何外界信息,不受自然或人为因素的干扰,具有很好的隐蔽性,在航海、航空、航天等领域得到了广泛应用。
惯性导航由于采用积分计算,其定位误差随时间而积累。
目前普遍采用将惯性导航与其他种类的导航相组合的办法,这种组合能取各种导航方法之长,大大提高导航系统整体的定位精度和性能,是一种较为理想的导航方式。
我公司执管A320系列飞机采用惯性导航、无线电导航或惯性导航、卫星导航的组合导航方式,其中惯性导航系统采用捷联式惯性导航系统。
系统的核心部件为三个惯性基准组件(IR),每个惯性基准组件已与相应的大气数据基准组件(ADR)组合在一起,称为大气数据惯性基准组件(ADIRU)。
每个IR内均有三个激光陀螺和三个加速度计,分别用来测量绕飞机三轴的角加速度和沿飞机三轴的线加速度,测得的加速度信号经微处理器计算后,可以得到飞机各种各样的导航参数,这些参数一方面在各种显示仪表上显示,供飞行人员使用,另一方面传送至其他许多系统和设备,以完成特定的功能。
每套惯性导航系统均有两种工作方式,导航方式和姿态方式。
导航方式是系统的正常工作方式,系统能提供全部的导航参数;姿态方式是系统导航计算功能失效后的减精度工作方式,此时系统仅能提供飞机的姿态和航向信息。
惯性导航系统进入导航工作方式前,必须进行校准。
这是因为惯导系统采用的是积分计算,在进行计算前,系统必须知道飞机的初始状态。
在校准过程中,系统寻找飞机所在处的地垂线,并确定当地的真北方位,从而获得飞机的初始姿态和初始方位信息。
惯性导航系统通常有两种校准方式,正常校准和快速校准(又称反转校准)。
正常校准飞机停在地面通电后,将惯导控制显示组件(CDU)上方式选择旋钮从OFF(关)位拔出置NAV(导航)位,系统在进行5秒钟的电瓶测试后即进入正常校准,CDU上校准(ALIGN)灯稳定地亮,飞机中央电子监控(ECAM)上显示屏显示IRSINALIGN7信息。
此时,ADR提供的计算空速(CAS)、垂直速度(V/S)和气压高度(ALT)数据在正、副驾驶员位主飞行显示器(PFD)上显示。
惯性导航系统的正常校准一般需10分钟,校准过程主要分为三个阶段;1.水平粗校准正常校准的头30秒为水平粗校准阶段,主要利用加速度计测量飞机的姿态角,即俯仰角和倾斜角。
(1)利用纵向加速度计测量飞机的俯仰角飞机停在地面上,俯仰角为θ、倾斜角为0时,虽然沿飞机纵轴方向没有线加速度,但纵向加速度计壳体随飞机纵轴俯仰了θ角,此时加速度计的质量摆敏感到了重力加速度g的分量g?sinθ?输出信号Uy则Uy=Ky?g?sinθ(Ky为纵向加速度计比例系数)当俯仰角θ很小时,sinθ?θ(θ单位为弧度)。
θ=Uy/(Ky?g)(2)利用横向加速度计测量飞机的倾斜角与上同理,飞机停在地面上,倾斜角为γ、俯仰角为0时,重力加速度g沿飞机横轴的分量g?sinγ被横向加速度计敏感到,输出信号Ux则Ux=Kx?g?sinγ(Kx为横向加速度计比例系数)。
当倾斜角γ很小时,sinγ?γ(γ单位为弧度)。
γ=Ux/(Kx?g)当飞机既有俯仰又有倾斜时,用上述公式测得的俯仰角为飞机真实俯仰角,测得的倾斜角为飞机非真实倾斜角(真实俯仰角为飞机纵轴与水平面之间的夹角,非真实倾斜角为飞机横轴与水平面之间的夹角)。
30秒后,飞机的俯仰角和倾斜角被计算出来,正、副驾驶位的PFD上姿态旗消失,飞机符号及空地球出现,俯仰、倾斜刻度及指示被显示。
2.陀螺-罗盘(或方位角)处理及水平精校准此阶段至少需要9分30秒,主要用于测量飞机的真航向角,并使用地球自转角速度的垂直分量计算出飞机所在处的纬度。
(1)真航向角的测定假定飞机停在地面上,俯仰角、倾斜角均为0,真航向角为Ψ,飞机所在处纬度为Φ。
由于飞机停在地面上,随地球一起自转,其自转角速度等于地球自转角速度ωe(ωe为15度/小时),ωe在飞机所在处水平面上的水平分量ωe?cosΦ?在当地地垂线上的垂直分量为ωe?sinΦ。
水平分量ωe?cosΦ又可以分解为沿飞机纵轴的分量ωe?cosΦ?cosΨ和沿飞机横轴的分量ωe?cosΦ?sinΨ?这二个分量分别被纵向陀螺及横向陀螺所敏感,输出信号Vy和Vx则Vy=Ly?ωy=Ly?ωe?cosΦ?cosΨVx=Lx?ωx=Lx?ωe?cosΦ?sinΨ(Ly为纵向陀螺比例系数、Lx为横向陀螺比例系数)。
Vx/Vy=Lx/Ly?tgΨΨ=arctg[(Vx?Ly)/(Vy?L x)](2)飞机所在处纬度的测定由上可知,垂直分量ωe?sinΦ可被垂直陀螺敏感到,输出信号VZ则VZ=LZ?ωe?sinΦ(LZ为垂直陀螺比例系数)Φcal=arcsin[VZ/(LZ.ωe)]考虑到飞机停放时,θ、γ不一定为零,故上述所得Ψ、Φcal为近似值。
此外,在以上计算飞机θ、γ、Ψ和Φcal值时,没有考虑激光陀螺和加速度计的误差,也没有考虑到校准时飞机的动态干扰,如风、装卸货物的震动等因素,因此计算值精度不高,应作进一步修正。
激光陀螺和加速度计的误差对系统精度至关重要,目前一般利用现代控制理论中的卡尔曼滤波技术对激光陀螺和加速度计进行误差处理和补偿,以达到精校准所需要的精度要求。
3.输入位置数据处理在正常校准中,飞机所在处的经纬度位置可从CDU或多功能控制显示组件(MCDU)上输入。
正常校准约5分钟后,真航向角被测定出来,如果此时已输入ND(导航显示器)上航向旗飞机有效的经纬度位置,则机长和副驾驶位的PFD、消失,航向标尺和航向指示符出现。
系统接收到有效的经纬度位置后,内部软件即执行BITETEST(机内自测试),用以检查输入的经纬度位置(Φent、δent)是否在上次断电时系统记录的最后Φrec、δrec)所允许的范围之内。
经纬度位置(系统进行的BITETEST主要包括以下三项:(1)3+3T测试人工输入的飞机经纬度位置与系统记录的最后位置之间的径向距离不得超过3+3T海里(T为上一航班系统导航方式的工作时间);(2)输入的经纬度值与系统记录的经纬度值的比较;要求:|Φent-Φrec|?1?,|δent-δrec|?1?;(3)计算纬度值与输入纬度值的比较要求:|Φcal-Φent|?0.5?。
如果上述三项测试均能通过,则人工输入的经纬度值被系统接收,10分钟后校准结束,CDU上ALIGN灯灭,系统进入导航工作方式。
系统在校准过程中,有时会出现CDU上ALIGN灯闪亮的现象,这不是系统故障的表现,通常可能有以下三种原因造成:一是系统在校准过程中出现差错,此时关掉相应的IR,重新校准即可;二是接通IR后,10分钟内一直未输入飞机的经纬度位置,此时PFD和ND上航向旗不消失,航向标尺及航向指示符不出现,在CDU或MCDU上输入飞机有效的经纬度位置后,ALIGN灯灭,系统进入导航方式;三是人工输入的经纬度位置与系统记录的最后位置相差太大,无法通过BITETEST,此时PFD和ND上航向旗不消失,航向标尺及航向指示符也不出现,这有可能是系统在上次航班导航方式中积累误差太大,或者是飞机断电后被移动了机位,此时,只需再次输入飞机所在处的经纬度位置,系统确认此位置为飞机目前的正确位置,ALIGN灯灭,系统进入导航方式。
快速校准飞机停在地面上,地速小于20节时,在CDU上将IR方式选择旋钮在5秒钟内从NAV位置OFF位后再置NAV位,即可对系统进行快速校准,快速校准约需1分钟时间,并仍需输入飞机有效的经纬度位置。
在快速校准中,所有的计算速度被置零,并使用上一次导航方式中飞机有效的姿态和航向数据进行精调。
通常当飞机执行完一个航班后,如果还要继续飞行,或者当机场流量控制导致飞机停留原地等待了较长时间,为消除系统的积累误差,机组不必重新进行正常校准,通过快速校准即可在很短时间内消除误差。
常见故障及维护注意事项激光陀螺惯性导航系统可靠性较高,平均无故障时间(MTBF)通常可达上万飞行小时,在两年的A320飞机维护工作中发现,该系统较少出现故障。
一般系统出现故障时,系统内部软件能有效地探测到,CDU上FAULT(故障)灯亮,ECAM上显示屏出现故障信息,显示设备上出现相应的故障旗,一些导航参数消失。
而更多时候,驾驶舱内没有惯导系统的故障指示,机组却经常反映正、副驾驶位显示器上飞机的显示位置相差太大,或者是飞机滑行时正、副驾驶位的地速指示不一致,在地面上对系统进行测试,测试结果又总是正常。
对于这种情况,可以根据以下两项性能指标来判断系统性能下降是否超标,从而决定是否更换相应的惯性基准组件。
1.径向位置误差(RPE)RPE更换标准的上下限值见表1RPE数值由MCDU?MFGC?DATA?POSITIONMONTIOR 读出。
导航时间由飞行记录本上的记录时间加上30分钟(假设ADIRU开始校准到关闭舱门准备退出之间的时间)所得。
更换IR的标准:在AREA1区域时:ADIRU可用,没有更换的必要。
在AREA2区域时:不需立即更换ADIRU,但必须监控后续航段,如仍在灰色区域则需更换ADIRU。
在AREA3区域时:更换ADIRU。
2.剩余地速偏差(RGSE)当飞机停稳后,可对每部IR进行RGSE值的检查。
读取RGSE值的方法有二种,一是通过ND左上角的GS(地速)显示值,IR1在机长位的ND上读取,IR2在副驾驶位的ND上读取,对于IR3,须将ATT/HDG(姿态/航向)选择旋钮转换至CAPT3(机长3)或F/03(副驾驶3)位后,在相应的ND上读取。
此外,在CDU上将显示方式置TK/GS(航迹/快速)位后,依次将系统选择旋钮置1、2、3位,即可分别读取三套IR的RGSE值。
更换IR的标准:当RGSE值小于15节时,系统性能符合要求,不必更换IR。
当RGSE值大于15节而小于21节时,应在下次飞行航段结束时再观察,如仍在此范围,需更换相应的IR。
当RGSE值大于21节时,系统性能下降已超标,立即更换IR。
在平时的航线维护中还会遇到惯导难以校准,特别是在冬季,这主要是激光陀螺对温度比较敏感,温度低时,校准精度差,导致惯导校不准。
所以在冬季时,应该提前校准,让惯导有一个预热的过程。
同时ADIRU对震动和静电比较敏感,所以在更换时要注意轻拿轻放,要提前释放身体的静电,手绝对不能接触电气接口。
ADIRU在平时的维护中出现的故障不是太多,只要维护人员严本网通讯员施浩良报格按照工作单操作维护,ADIRU就可以非常可靠的工作。