使用说明--IEC101装置规约
IEC101规约

传送原因(肯定确认/否定确认)
应用服务数据单元公共地址 信息体地址 召唤遥信遥测BCD码命令限定词
14
15
**H
16H
帧校验和
结束字符
总召唤结束帧
序号 1 2
值 68H 09H 启动字符 帧长度
含义
3
4 5 6 7 8 9 10 11-12 13 14 15 1 0 AC D
09H
68H DF C **H 100+ 01H 0AH **H 0000H 20+ **H 16H 0 0 0 0
序号 1 2 3 4 5 6 7 8 9 10 11-12 13 14 15
不带品质描述的遥测帧
序号 1 2 3 4 5 6 7 8 9 10 1 22+ **H 1 0 ACD DFC 值 68H 63+ 63+ 68H 1 **H 9+ 15 0 0 0 启动字符 帧长度 帧长度重复 启动字符 控制域 地址域 类型标识(测量值) 可变结构限定词(传送15个点) 传送原因(信息组号) 应用服务数据单元公共地址 含义
101规约常用报文
总召唤命令帧
序号 1 2 3 值 68H 09+ 09+ 启动字符 帧长度 帧长度重复 含义
4
5 6 7 8 9 10 11-12 13 14 15 0 1 FCB 1
68H
0 **H 100+ 01H 6+ **H 0000H 20+ **H 16H 0 1 1
启动字符
控制域 地址域 类型标识(召唤) 可变结构限定词 传送原因(激活) 应用服务数据单元公共地址 信息体地址 召唤遥信遥测BCD码命令限定词 帧校验和 结束字符
IEC非平衡101规约使用说明

IEC非平衡式101调度一.规约简介使用范围:IEC101调度主站通讯介质:串口二.规约转换内容●当前功能本规约具有转换YC、YX、YM、YK功能三.规约相关信息●当前信息1.“链路地址”/“应用层地址”均代表变电站地址,应由调度主站分配;2.“遥测门槛”:遥测值的变化量超过此值,上送变化遥测;3. “应用层地址采用双字节”:0-应用服务数据单元公共地址采用单字节;1-应用服务数据单元公共地址采用双字节;4. “信息体地址采用3字节”:0-信息体地址2字节表示;1-信息体地址3字节表示;5. “采用单字节确认”:0-确认报文采用短报文方式;1-确认报文采用单字节“0xe5”;6. “装置状态信息体起始地址”:一般不使用,默认值设为0;7. “双点遥信信息体起始地址”/“单点遥信信息体起始地址”/“遥测信息体起始地址”/ “遥脉信息体起始地址”/“步位置信息体起始地址”/“遥控信息体起始地址”由主站确定,此数值应与主站保持一致;8. “装置状态上送数量”:一般不使用,默认值设为0;9. “双点遥信上送数量”/“单点遥信上送数量”/“步位置上送数量”/“遥测上送数量”/“遥脉上送数量”应按调度转发表的实际转发数量填写;10. “单点遥信起始位置1开始”:在调度遥信转发表中单点遥信的实际起时序号;11. “双点遥信占用2个遥信”:0-双点遥信占用1个遥信1-双点遥信占用2个遥信12. “双点遥信占用2个信息体地址”:0-双点遥信占用1个信息体地址1-双点遥信占用2个信息体地址13. “组1起始信息体地址”-"组16结束信息体地址"、“脉冲组1起始信息体地址”-“脉冲组4起始信息体地址”不使用时设为0,使用时与主站端保持一致;14. “遥测系数数量”:默认设为128,需要扩充时根据实际遥测系数个数设定;15. “遥测001系数”-“遥测128系数”:一般不使用,只有主站无法设遥测系数时使用,系数的计算根据主站要求而异。
IEC101

IEC101规约流程一.流程报文中字符均为16进制表示第一步:握手请求链路状态发送―>请求链路状态:10 (启动字符)49 (控制域)01(链路地址即RTU地址)4a (校验)16(结束字符)接收―>收到链路完好:10 (启动字符)8b(控制域)01(链路地址即RTU地址)8c (校验)16(结束字符)第二步:复位链路发送―>复位链路状态:10(启动字符)40 (控制域)01(链路地址即RTU地址)41(校验)16(结束字符)接收―>收到确认:10 (启动字符)80(控制域)01(链路地址即RTU地址)81(校验)16(结束字符)第三步:召唤全数据。
发送―>总召唤:68 (启动字符)09(长度,从控制域到校验前一字节长度,不包括校验字节)09(长度)68(启动字符)53(控制域)01(链路地址即RTU地址)64(类型标识)01(可变结构限定词)06(传送原因,激活)01(公共地址,同链路地址)00 00(信息体地址,2个字节)14(QOI,区分是总召唤还是分组召唤)xx(校验)16接收―>总召唤确认帧:68 (启动字符)09(长度)09(长度)68(启动字符)80(控制域)01(链路地址即RTU地址)64(类型标识)01(可变结构限定词)07(传送原因,激活确认)01(公共地址,同链路地址)00 00(信息体地址,2个字节)14(QOI,区分是总召唤还是分组召唤)xx(校验)16接收―>遥信帧:68(启动字符)3E(长度)3E (长度)68(启动字符)88(控制域)01 (链路地址即RTU地址)14(类型标识,具有状态变位检出的成组单点遥信)08(可变结构限定词,8个信息体)14(传送原因,响应总召唤)01(公共地址,同链路地址)0100(信息体地址,2个字节,从1号遥信开始)80 04(16个遥信值)00 00(状态变化检出,与每个遥信值按位对应)00(品质描述)1100(信息体地址,2个字节,从17号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)2100 (信息体地址,2个字节,从33号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)3100 (信息体地址,2个字节,从49号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)4100 (信息体地址,2个字节,从65号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)5100 (信息体地址,2个字节,从81号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)6100 (信息体地址,2个字节,从97号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)71 00 (信息体地址,2个字节,从113号遥信开始)00 00 (16个遥信值)00 00 (状态变化检出,与每个遥信值按位对应)00(品质描述)26(校验位)16(结束符)接收―>遥测帧:68(启动字符)C8(长度)C8(长度)68(启动字符)(控制域)01(链路地址即RTU地址)15(类型标识,不带品质的遥测)E0(可变结构限定词,有96个遥测值)14(传送原因,响应总召唤)01(公共地址,同链路地址)01 07(信息体地址,2字节,遥测号=0x701-0x701=0号开始)00 00(遥测值,2个字节)00 00 (遥测值,2个字节)00 00 00 00 08 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 C3(校验)16(结束符)接收―>总召唤结束帧:68 (启动字符)09(长度)09(长度)68(启动字符)80(控制域)01(链路地址即RTU地址)64 (类型标识)01(可变结构限定词)0a(传送原因,激活结束)01(公共地址,同链路地址)00 00(信息体地址,2个字节)14(QOI,区分是总召唤还是分组召唤)xx(校验)16第四步:对钟发送―>对时命令:68(启动字符)0F (长度)0F(长度)68 (启动字符)73(控制域)01(链路地址即RTU地址)67 (类型标识)01(可变结构限定词)06 (传送原因,激活)01(公共地址,同链路地址)00 00(信息体地址,2个字节)22 58(毫秒,2字节)14(分)0F(时)62(日)87(月)67(年)F0(校验)16(结束符)接收―>对时确认:68(启动字符)0F (长度)0F(长度)68 (启动字符)80(控制域)01(链路地址即RTU地址)67(类型标识)01(可变结构限定词)06 (传送原因,激活确认)01(公共地址,同链路地址)00 00(信息体地址,2个字节)13 58(毫秒,2字节)14(分)0F(时)62(日)87(月)67(年)F1(校验)16(结束符)第五步:召唤全电度发送―>召唤全电度:68 (启动字符)09(长度)09(长度)68(启动字符)53(控制域)01(链路地址即RTU地址)65 (类型标识)01(可变结构限定词)06(传送原因,激活)01(公共地址,同链路地址)00 00(信息体地址,2个字节)45(QOI,区分是总召唤还是分组召唤)xx(校验)16接收―>确认帧:68 (启动字符)09(长度)09(长度)68(启动字符)80(控制域)01(链路地址即RTU地址)65 (类型标识)01(可变结构限定词)07(传送原因,激活确认)01(公共地址,同链路地址)00 00(信息体地址,2个字节)45(QOI,区分是总召唤还是分组召唤)xx(校验)16接收―>累计电度值:68(启动字符)E6(长度)E6(长度)68(启动字符)88 (控制域)01(链路地址即RTU地址)0F (类型标识)20 (可变结构限定词,32个电度)03(传送原因)01(公共地址,同链路地址)010C (信息体地址,2个字节,电度序号=0xc01-0xc01=0)00 00 00 00(电度值)00(描述信息)020C(信息体地址,2个字节,电度序号=0xc02-0xc01=1)00 00 00 00 (电度值)01(描述信息)030C 00 00 00 00 02040C 00 00 00 00 03050C 00 00 00 00 04060C 00 00 00 00 05070C 00 00 00 00 06080C 00 00 00 00 07090C 00 00 00 00 080A 0C 00 00 00 00 090B 0C 00 00 00 00 0A0C 0C 00 00 00 00 0B0D 0C 00 00 00 00 0C0E 0C 00 00 00 00 0D 0F 0C 00 00 00 00 0E 10 0C 00 00 00 00 0F 11 0C 00 00 00 00 10 12 0C 00 00 00 00 11 13 0C 00 00 00 00 12 14 0C 00 00 00 00 13 15 0C 00 00 00 00 14 16 0C 00 00 00 00 15 17 0C 00 00 00 00 16 18 0C 00 00 00 00 17 19 0C 00 00 00 00 18 1A 0C 00 00 00 00 19 1B 0C 00 00 00 00 1A 1C 0C 00 00 00 00 1B 1D 0C 00 00 00 00 1C 1E 0C 00 00 00 00 1D 1F 0C 00 00 00 00 1E 20 0C 00 00 00 00 1F 5C(校验)16(结束符)第六步:召唤二级数据(变化遥测)发送―>召唤二级数据:10 7B 01 7C 16接收―>无变化数据:10 89 01 8A 16发送―>召唤二级数据:10 5B 01 6C 16接收―>变化遥测:68 0A 0A 68 88 01 15 01 05 01 05 07 07 00 xx 16第七步:如果有一级数据,召唤一级数据(变位遥信及SOE)发送―>召唤二级数据:10 7B 01 7C 16接收―>有变位发生:10 A9 01 AA 16发送―>召唤一级数据:10 5A 01 5B 16接收―>变位遥信:68 09 09 68 88 01 01(类型标识,单点遥信)01 05 01 03 00 01 xx 16第八步:遥控发送―>遥控预置:68 (启动字符)09(长度)09(长度)68(启动字符)53(控制域)01(链路地址即RTU地址)2E (类型标识)01(可变结构限定词)06 (传送原因,激活)01(公共地址,同链路地址)03 0B(信息体地址,2字节,遥控号=0xb03-0xb01=2号遥控)82(预置控合)xx(校验)16 (结束符)接收―>遥控反校:68 09 09 68 80 01 2E 01 07 (传送原因,激活确认)01 03 0B 82 4A 16发送―>遥控执行68 09 09 68 73 01 2E 01 06 01 03 0B 02(执行控合)xx 16接收―>执行确认:68 09 09 68 80 01 2E 01 0a (传送原因,操作结束)01 03 0B 02xx 16发送―>遥控撤销:68 09 09 68 53 01 2E 01 08(传送原因)01 03 0B 02 (执行控合)xx 16 接收―>执行确认:68 09 09 68 80 01 2E 01 0a (传送原因,操作结束)01 03 0B 02 xx 16第九步,平时轮循召唤二级数据。
使用说明IEC101装置规约

使用说明IEC101装置规约IEC101装置规约是用于电力系统监控与控制的通信协议之一,它定义了在电力监控系统中,通过传输数据来实现设备之间的通信和控制。
本文将详细介绍IEC101装置规约的使用说明,以帮助读者更好地理解和应用该规约。
一、IEC101装置规约概述IEC101装置规约是国际电工委员会(IEC)制定的一种通信协议,主要用于监控与控制电力系统中的遥测、遥信和遥控信息。
该规约通过串行方式传输数据,采用了一系列规定的帧结构和数据格式,确保数据的可靠传输和正确解析。
IEC101规约一般将工程测量值(遥测)、状态变位信息(遥信)和远方控制命令(遥控)作为基本的通信功能。
二、IEC101装置规约的运行机制IEC101装置规约主要由三个层次构成:物理层、数据链路层和应用层。
在物理层,IEC101规约使用标准的串行电平转换技术,将二进制数据转换为信号进行传输;在数据链路层,规定了传输帧的各个字段,包括起始字符、控制字段、地址字段和校验字段等;在应用层,定义了遥测、遥信和遥控信息的编码方式和解析方式。
三、IEC101装置规约的使用步骤IEC101装置规约的使用步骤如下:1. 配置通信参数:包括物理层参数、数据链路层参数和应用层参数。
根据实际情况,设置通信波特率、校验方式、站址等参数。
2. 建立连接:规定了主站与从站之间的连接建立过程,包括主站发起请求、从站响应确认和建立连接。
3. 传输数据:主站向从站发送监控命令,从站根据命令执行相应操作,并反馈执行结果给主站。
4. 断开连接:规定了连接的结束过程,包括主站发送断开请求、从站响应确认和断开连接。
四、IEC101装置规约的应用范围IEC101装置规约广泛应用于电力系统监控与控制领域,包括电网调度、变电站自动化、电力设备监测和控制等方面。
它能够实现电力系统中各个设备之间的数据采集、信息交换和灵活控制,提高了电力系统的安全性、稳定性和可靠性。
五、IEC101装置规约的优势与挑战IEC101装置规约具有以下优势:1. 可靠性高:采用了校验和差错重传等机制,确保数据的可靠传输;2. 灵活性强:具备多种数据传输方式和编码方式,适应不同的应用场景;3. 扩展性好:支持多主站和多从站之间的通信,能够满足复杂系统的需求。
远动主站101规约配置说明

(规约标准DL/T 634--1997 neq IEC870--5--101:1995 第101篇基本远动任务配套标准)一、规约支持子站->主站监视方向过程和控制信息类型标示<1> :不带时标的单点信息类型标示<2> :带时标的单点信息类型标示<3> :不带时标的双点信息类型标示<4> :带时标的双点信息类型标示<5> :变压器分接头信息类型标示<9> :测量值类型标示<15> :电能脉冲记数量类型标示<17> :带时标的继电保护或重合闸设备单个事件类型标示<21> :不带品质因数的测量值类型标示<70> :初始化结束主站->子站控制方向过程和控制信息类型标示<45> :单点遥控命令类型标示<46> :双点遥控命令类型标示<47> :升降命令(如果改为46,则不支持急停)类型标示<100>:召唤命令类型标示<101>:电能脉冲召唤命令类型标示<102>:读数据类型标示<103>:时钟同步命令类型标示<104>:测试命令类型标示<105>:复位进程命令二、通道参数配置1、首先进入参数配置的通道设置向导中;2、选择IEC101规约,配置串口参数;3、进入“高级配置”窗口。
a、请选择是否使用该通道对计算机校时;b、校时的基准年现在为2000,是当规约中用一个字节表示年份时,需要与之求和得到4位数的实际年份;c、本规约暂时只支持上送过程值;d、事故总、预告总复归时间设置,决定了事故总信号和预告总信号被置位后自动复归的时间间隔;e、遥控超时时间的设置应大于调度端所设遥控超时时间,一般不应小于10秒;f、遥测越限死区值,是当规约召唤2级数据时,上送的遥测的变化量大于此处所设置的的遥测变化千分比;g、禁止遥控的两个选项,本规约暂时未采用;h、切换通道参数中,误码帧数和判断误码时间间隔,由于本规约采用串口按字节接收,因此通道误码被忽略,只需按通讯中断时间来判断是否需要切换通道;i、允许通道中断时间应大于链路响应时间,波特率小时该时间应稍大(300波特率时应大于5秒),波特率大时可适当减小,但不应小于3秒,如果需要主动上送传输时该时间应加大至大于调度端链路响应时间。
IEC101规约介绍复习过程
I E C101规约介绍IEC870-5-101规约介绍1.概述本篇介绍主站和RTU之间通讯的IEC870-5-101规约,该规约有两种传输方式:平衡式和非平衡式传输,在点对点和多个点对点的全双工通道结构中采用平衡式传输方式,在其它通道结构中只采用非平衡式传输方式。
平衡式传输方式中101规约是一种“问答+循环”式规约,即主站端和子站端都可以作为启动站;而当其用于非平衡式传输方式时101规约是问答式规约,只有主站端可以作为启动站。
2.帧格式简单说明2.1固定帧长格式2.2可变帧长格式2.3长度L长度L包括控制域、地址域、用户数据区的字节数,为二进制数。
2.4控制域(C)的定义RES:备用PRM:启动报文位 =0:从动站,报文为确认报文或响应报文。
=1:启动站,报文为发送或请求报文。
FCB:帧计数位:启动站向从动站传输启动站向从动站传输新一轮的发送/确认、请求/响应服务时,将前一轮FCB取相反值。
FCV:帧计数有效位:启动站向从动站传输=0:表示FCB变化无效。
=1:表示FCB变化有效。
ACD:要求访问位:主站做从动站时ACD位无实际意义,ACD=0。
子站做从动站时ACD=0:表示子站无1级用户数据;ACD=1:表示子站有1级用户数据,希望向主站传输。
DFC:数据流控制位:从动站向启动站传输=0:表示子站可以继续接收数据。
=1:表示子站数据区满,无法接收新数据。
功能码(D3—D0):功能码范围为0—15(00H—0FH)。
2.5链路地址域链路地址域为子站站址。
2.6帧检验和帧检验和是控制、地址、用户数据区所有字节的算术和(不考虑溢出位即256模和)。
2.7 应用服务数据单元结构在监视方向上的过程信息类型标识=TYPE IDENTIFICATION:=UI8[1..8]<0..44><0>:= 未定义<1>:= 单点信息 M_SP_NA_1<2>:= 带时标的单点信息 M_SP_TA_1<3>:= 双点信息 M_DP_NA_1<4>:= 带时标的双点信息 M_DP_TA_1<5>:= 步位置信息 M_ST_NA_1<6>:= 带时标的步位置信息 M_ST_TA_1<7>:= 32比特串 M_BO_NA_1<8>:= 带时标的32比特串 M_BO_TA_1<9> := 测量值, 规一化值 M_ME_NA_1<10> := 测量值,带时标的规一化值 M_ME_TA_1<11> := 测量值, 标度化值 M_ME_NB_1<12> := 测量值, 带时标的标度化值 M_ME_TB_1<13> := 测量值, 短浮点数 M_ME_NC_1<14> := 测量值, 带时标的短浮点数 M_ME_TC_1<15> := 累计量 M_IT_NA_1<16> := 带时标的累计量 M_IT_TA_1<17> := 带时标的继电保护设备事件 M_EP_TA_1<18> := 带时标的继电保护设备成组启动事件 M_EP_TB_1<19> := 带时标的继电保护设备成组输出电路信息 M_EP_TC_1<20> := 带变位检出的成组单点信息 M_PS_NA_1<21> := 测量值, 不带品质描述词的规一化值 M_ME_ND_1<22..29> := 为将来兼容定义保留<30> := 带CP56Time2a时标的单点信息 M_SP_TB_1<31> := 带CP56Time2a时标的双点信息 M_DP_TB_1<32> := 带CP56Time2a时标的步位置信息 M_ST_TB_1<33> := 带CP56Time2a时标的32比特串 M_BO_TB_1<34> := 带CP56Time2a时标的测量值, 规一化值 M_ME_TD_1<35> := 带CP56Time2a时标的测量值, 标度化值 M_ME_TE_1<36> := 带CP56Time2a时标的测量值, 短浮点数 M_ME_TF_1<37> := 带CP56Time2a时标的累计量 M_IT_TB_1<38> := 带CP56Time2a时标的继电保护设备事件 M_EP_TD_1<39> := 带CP56Time2a时标的继电保护设备成组启动事件 M_EP_TE_1<40> := 带CP56Time2a时标的继电保护设备成组输出电路信息M_EP_TF_1<41..44> := 为将来兼容定义保留在控制方向的过程信息类型标识=TYPE IDENTIFICATION:=UI8[1..8]<45..69>CON<45>:= 单点命令 C_SC_NA_1CON<46>:= 双点命令 C_DC_NA_1CON<47>:= 步调节命令 C_RC_NA_1CON<48>:= 设定值命令, 规一化值 C_SE_NA_1CON<49>:= 设定值命令, 标度化值 C_SE_NB_1CON<50>:= 设定值命令, 短浮点数 C_SE_NC_1CON<51>:= 32比特串 C_BO_NA_1<52..69> := 为将来兼容定义保留在监视方向的系统命令类型标=TYPE IDENTIFICATION=:=UI8[1..8]<70..99><70>:= 初始化结束 M_EI_NA_1<71..99>:= 为将来兼容定义保留在控制方向的系统命令类型标识=TYPE IDENTIFICATION:=UI8[1..8]<100..109>CON<100>:= 总召唤命令 C_IC_NA_1CON<101>:= 计数量召唤命令 C_CI_NA_1CON <102>:= 读命令 C_RD_NA_1CON<103>:= 时钟同步命令 C_CS_NA_1CON<104>:= 测试命今 C_TS_NA_1注:在控制方向标上(CON) 的应用服务数据单元是被确认的应用服务,在监视方向形成镜像,但传送原因不同. 这些镜像的应用服务数据单元用来作为肯定/否定认可(验证) 。
IEC101规约介绍讲解

从动站至启 动站
FCB: 帧计数位: • 帧计数位0或1,是每个站连续的发送/确认或者请求/响应服务的变化位。 • 帧计数位用来消除信息传输的丢失和重复。启动站向同一从动站传输新一轮的发送 /确 认 (SEND/CONFIRM) 或请求 / 响应 (REQUEST/REPOND) 传输服务时,将帧计数位 (FCB) 取相反值,启动站为每一个从动站保留一个帧计数位 (FCB)的拷贝,若超时未由从动站收 到所期望的报文,或接收出现差错,则启动站不改变帧计数位 FCB的状态,重复原来的 发送/确认或者请求/响应服务。 • 复位命令的情况下帧计数位 (FCB)清零,从动站接收此命令将帧计数位置零,并期望下 一次的从启动站到从动站的传,其帧计数位 (FCB)为1,帧计数有效位FCV为1。
控制站的 数据终端 设 备 ( DTE) 数据电路 终接设备 (DCE) 数据电路 终接设备 (DCE) 控制站的 数据终端 设 备 ( DTE)
串行远动通信
控制站和被控站的接口和连接
物理层(DCE)
线路耦合器将比特串行数据从链路层要求的 形式变换为线路传输要求的形式,线路耦合器 的典型任务如下: -变换信号;
1. 2002版增加了链路确认过程。 2. 2002版信息对象地址范围扩大。
IEC60870-5系列标准
•基本标准(共分5篇)
第一篇 第二篇 第三篇 第四篇 第五篇 60870-5-1 60870-5-2 60870-5-3 60870-5-4 60870-5-5 传输帧格式 链路传输规约 应用数据的一般结构 应用信息元素定义和编码 基本应用功能
101规约说明书

2.6帧检验和
帧检验和是控制、地址、用户数据区所有字节的算术和(不考虑溢出位即256模和)。
3.平衡式传输(主站作为启动站的各种报文)
3.1 主站的询问顺序
主站请求链路状态→子站响应链路状态→主站复位远方链路→子站肯定确认
子站请求链路状态→主站响应链路状态→子站复位远方链路→主站肯定确认
链路过程若失败则重发3次,3次后停止通讯并置链路为断开状态。
主站的工作流程是主站总召唤→时间同步→召唤1级用户数据→进行遥控→时间同步→召唤2级用户数据→召唤分组YX→召唤分组YC
子站故障主动上传→主站肯定确认
3.2 复位远方链路报文
3.2.1主站复位远方链路帧(C_RL_NA_1)
3.5.5 子站发送总召唤结束帧(M_IC_NA_1)
子站时钟同步确认帧(C_CS_NA_1 ACTCON)
3.10.2 子站发送遥控命令确认帧(预置/执行)(C_DC_NA_1)。
IEC101规约报文解析举例
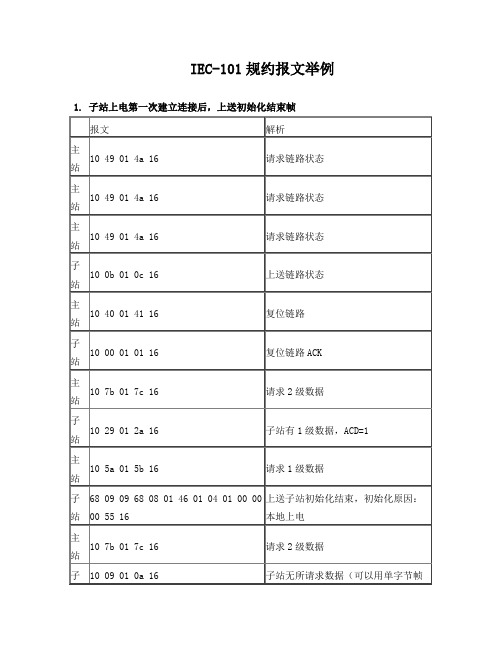
IEC-101规约报文举例1. 子站上电第一次建立连接后,上送初始化结束帧2. 主站复位命令3. 完整的时钟同步过程3.1. 延时采集和延时发送3.2. 时钟同步4. 总召唤4.1. 站总召唤4.2. 分组召唤5. 遥控5.1. 主站下发单点遥控合选择并且执行的全过程5.2. 主站下发单点遥控分选择并且撤销的全过程6. 子站突发上送数据6.1. YXBW、SOE主站:10 5b 01 5c 16子站:10 29 01 2a 16主站:10 7a 01 7b 16子站:68 09 09 68 28 01 01 81 03 01 03 00 01 b3 16【突发单点遥信】主站:10 5a 01 5b 16子站:68 09 09 68 28 01 01 81 03 01 03 00 00 b2 16【突发单点遥信】主站:10 7a 01 7b 16子站:68 1a 1a 68 08 01 1e 02 03 01 03 00 01 fc 43 39 16 81 03 07 03 00 00 f1 4a 39 16 81 03 0762 16【突发单点时标单点CP56Time2a时标事件】主站:10 5b 01 5c 16子站:10 09 01 0a 16主站:10 5a 01 5b 16子站:68 09 09 68 28 01 01 81 03 01 08 00 00 b7 16【突发单点遥信】主站:10 7a 01 7b 16子站:68 0c 0c 68 08 01 02 01 03 01 08 00 01 97 32 04 e6 16【突发带时标CP24单点遥信事件】主站:10 5b 01 5c 16子站:10 09 01 0a 166.2. 变化遥测主站:10 7b 01 7c 16子站:10 29 01 2a 16主站:10 5a 01 5b 16子站:68 0b 0b 68 28 01 09 81 03 01 08 40 00 01 00 00 16【突发规一化遥测】主站:10 7a 01 7b 16子站:68 0b 0b 68 08 01 09 81 03 01 08 40 00 00 00 00 df 16【突发规一化遥测】主站:10 5b 01 5c 16子站:10 09 01 0a 16。
IEC101规约介绍

IEC101规约介绍
IEC101规约主要用于电力系统自动化监控中,实现子站与主站之间的数据交换和通信。
子站主要负责采集电网的实时数据和运行状态信息,而主站则负责对子站进行控制和监控。
IEC101规约确保了子站和主站之间的稳定和可靠的双向通信。
在直接序列通信中,数据是通过串行通信线路传输的,通信速率通常在300至9600比特/秒之间。
直接序列通信主要适用于简单的、点对点的通信情况,通信距离较短。
在IEC 101规约中,数据的传输以信息报元单元(Information Object Unit,简称IOU)为单位。
每个IOU包含一个信息对象组(Information Object Group,简称IOG)或一个信息对象(Information Object,简称IO)。
IOG包含一个或多个信息对象,而IO是信息报文的基本单元。
IEC101规约中定义了多种命令和传输服务,用于不同的应用场景。
其中,主站可以向子站发送控制命令,如遥控命令、遥调命令等,以实现对电网设备的控制操作。
主站还可以向子站发送读命令或写命令,以读取或写入子站的参数和数据。
总之,IEC101规约是一种用于传输电能信息的通信规约,实现了电力系统中子站和主站之间的稳定和可靠的双向通信。
它是电力系统自动化监控中使用最广泛的通信规约之一,为电力系统的正常运行和管理提供了可靠的技术支持。
IEC 101(104)规约 介绍

40
1级数据-变位遥信
68 L L 68 L.C L.A A.D CS 16
01 02 14 01 04 00 01 01 00 00 不带时标的单点信息 SQ:1 元素序列;2个信息对象 传输原因:总召唤 应用层公共地址01 信息体地址:0x0004 值:合 信息体地址:0x0001 值:分
48 100 101 103
遥调 总召唤 召唤电度量 校时
0x30 0x64 0x65 0x67
20
可变结构限定词
D7 D6 D5 D4 D3 D2 D1 D0
SQ
Num
说明:
SQ<0>:由信息对象地址寻址的单个信息元素或元素集合。
SQ<1>:单个信息元素或信息元素同类集合的序列。 SQ<0>:每个信息体分别带有信息体地址 SQ<1>:所有信息体共用信息体地址,后续信息体地址依 次加1。
17
链路层控制域功能码(平衡模式)
启动方向 功能码和服务
<0> 复位远方链路 <1>复位用户进程 <3>发送/确认用户数据 <9>请求链路状态
从动方向 功能码和服务
<0>确认:肯定认可 <1>确认:否定认可
<4>发送/无应答用户数据 无应答 <11>响应:链路状态
18
规约应用层
0x68 Len Len 0x68 Link Control Link Address Application Data Check Code 0x16
信息体地址:0x0704 遥测值:0x640a 品质描述:00
信息对象地址:0x0705 遥测值:0x730b 品质描述:00 信息对象地址:0x0706 遥测值:0x0273 品质描述:00
IEC101规约流程1

IEC101规约流程一IEC870-5-101规约说明规约标准原文请参照国内1998-05-01实施的等同标准《远动设备及系统第5部分传输规约第101篇基本远动任务配套标准》。
采用101规约的主站与厂站端设备进行通信时,主站的工作流程是MS(主站)—请求链路状态—复位远方链路—总召唤—时间同步—召唤1级用户数据—进行遥控—时间同步—召唤2级用户数据—召唤分组YX—召唤分组YC。
(一)参考模型:本标准中使用的参考模型是源于开放式系统互联的ISO-OSI参考模型,由于远动系统在有限带宽下要求特别短的反应时间,故改进采用增强性能结构(EPA),见下图所示:在这样的参考模型下,各层次数据单元之间的关系如下图所示:(二)帧格式:1.固定帧长帧格式2.可变帧长帧格式其中各部分的含义如下:(1)长度L=C+A+链路用户数据的长度。
(2)控制域C的定义如下:主站向子站传输时:DIR=0, PRM=1;FCB =1表示有一级数据子站向主站传输时:DIR=1, PRM=0。
ACD=1表示有一级数据主站向同一个子站传输新一轮的发送/确认和请求/响应传输服务时,将FCB位取反;主站为每一个子站保留一个帧计数位的拷贝,若超时没有从子站收到所期望的报文,或接收出现差错,则主站不改变帧计数位的状态,重复传送原报文,重复次数为3次。
FCV若等于0,FCB的变化无效。
DFC表示还有报文,后续报文将引起溢出(DFC=1),主站向子站传输的功能码如下表所列:子站向主站传输的功能码如下表所列:(3)链路地址域的内容指的是子站即RTU的站号,通常由调度与变电站协商确定。
(4)链路用户数据(即前文所提到的ASDU)的结构如下:其中,各部分的解释如下:a.类型标识常用的有:参数地址范围•子站-->主站过程信息•M_SP_NA_1 单位遥信带品质描述不带时标 1 •M_DP_NA_1 双位遥信带品质描述不带时标 3 •M_ME_NA_1 归一化遥测值带品质描述不带时标9 •M_ME_NB_1 标度化遥测值带品质描述不带时标11 •M_ME_NC_1 短浮点遥测值带品质描述不带时标13 •M_IT_NA_1 累计量带品质描述不带时标15 •M_PS_NA_1 成组单位遥信带变位检出标志20 •M_ME_ND_1 归一化遥测值不带品质描述不带时标21 •M_SP_TB_1 单位遥信(SOE)带品质描述带绝对时标30 •M_DP_TB_1 双位遥信(SOE)带品质描述带绝对时标31 •M_ME_TD_1 归一化遥测值带品质描述带绝对时标34 •M_ME_TE_1 标度化遥测值带品质描述带绝对时标35 •M_ME_TF_1 短浮点遥测值带品质描述带绝对时标36 •M_IT_TB_1 累计量带品质描述带绝对时标37 1――不带时标的单点信息;01H2――带时标的单点信息;SOE3――不带时标的双点信息;03H4――带时标的双点信息;SOE5――步位置信息(变压器分接头信息)6――带时标的步位置信息(变压器分接头信息)(未用)7――子站远动终端状态(未用)9――测量值09Hbit10-bit0为数值部分,负数为补码bit11为符号位,0正1负b14=1表示溢出,b15=1时表示数无效bit15-bit12为空(画面上显示值为经过前置系数因子处理过后的值)10――带时标的测量值(未用)15――电能脉冲计数量0FH16――带时标的电能脉冲计数量(未用)10Hb23-b0位代表电能脉冲计数值,推荐用二进制码表示。
101规约7个字节时标

101规约7个字节时标
(原创版)
目录
1.101 规约的概述
2.101 规约的字节时标
3.101 规约的应用场景
正文
1.101 规约的概述
101 规约,全称为 IEC 60870-5-101,是一种广泛应用于电力系统自动化领域的通信规约。
该规约主要解决了电力系统中各种设备之间的数据传输和通信问题,为电力系统的自动化运行提供了有效的通信支持。
2.101 规约的字节时标
在 101 规约中,字节时标是一种重要的数据结构,用于描述数据帧
的结构和内容。
字节时标由 7 个字节组成,分别是:起始字节、地址字节、控制字节、数据长度字节、数据字节、校验字节和结束字节。
这 7 个字节共同构成了一个完整的数据帧,实现了数据在电力系统中的高效传输。
3.101 规约的应用场景
101 规约在我国电力系统中得到了广泛的应用,其应用场景主要包括以下几个方面:
(1)电力系统保护:101 规约可以用于实现电力系统保护设备的通信,如距离保护、过电流保护等。
(2)电力系统控制:101 规约可以用于实现电力系统控制设备的通信,如开关、调节器等。
(3)电力系统监测:101 规约可以用于实现电力系统监测设备的通
信,如电压、电流互感器等。
(4)电力系统故障诊断:101 规约可以用于实现电力系统故障诊断设备的通信,如故障录波器等。
总之,101 规约作为电力系统自动化领域的通信标准,其字节时标为数据传输提供了有效的结构和内容描述。
IEC101规约介绍

IEC101规约介绍IEC870-5-101规约介绍1.概述本篇介绍主站和RTU之间通讯的IEC870-5-101规约,该规约有两种传输⽅式:平衡式和⾮平衡式传输,在点对点和多个点对点的全双⼯通道结构中采⽤平衡式传输⽅式,在其它通道结构中只采⽤⾮平衡式传输⽅式。
平衡式传输⽅式中101规约是⼀种“问答+循环”式规约,即主站端和⼦站端都可以作为启动站;⽽当其⽤于⾮平衡式传输⽅式时101规约是问答式规约,只有主站端可以作为启动站。
2.帧格式简单说明2.12.22.3长度L长度L包括控制域、地址域、⽤户数据区的字节数,为⼆进制数。
2.4RES:备⽤PRM:启动报⽂位 =0:从动站,报⽂为确认报⽂或响应报⽂。
=1:启动站,报⽂为发送或请求报⽂。
FCB:帧计数位:启动站向从动站传输启动站向从动站传输新⼀轮的发送/确认、请求/响应服务时,将前⼀轮FCB取相反值。
FCV:帧计数有效位:启动站向从动站传输=0:表⽰FCB变化⽆效。
=1:表⽰FCB变化有效。
ACD:要求访问位:主站做从动站时ACD位⽆实际意义,ACD=0。
⼦站做从动站时ACD=0:表⽰⼦站⽆1级⽤户数据;ACD=1:表⽰⼦站有1级⽤户数据,希望向主站传输。
DFC:数据流控制位:从动站向启动站传输=0:表⽰⼦站可以继续接收数据。
=1:表⽰⼦站数据区满,⽆法接收新数据。
功能码(D3—D0):功能码范围为0—15(00H—0FH)。
2.5链路地址域链路地址域为⼦站站址。
2.6帧检验和帧检验和是控制、地址、⽤户数据区所有字节的算术和(不考虑溢出位即256模和)。
2.7 应⽤服务数据单元结构在监视⽅向上的过程信息类型标识=TYPE IDENTIFICATION:=UI8[1..8]<0..44><0>:= 未定义<1>:= 单点信息M_SP_NA_1<2>:= 带时标的单点信息M_SP_TA_1<3>:= 双点信息M_DP_NA_1<4>:= 带时标的双点信息M_DP_TA_1<5>:= 步位置信息M_ST_NA_1<6>:= 带时标的步位置信息M_ST_TA_1<7>:= 32⽐特串M_BO_NA_1<8>:= 带时标的32⽐特串M_BO_TA_1<9> := 测量值, 规⼀化值M_ME_NA_1<10> := 测量值,带时标的规⼀化值M_ME_TA_1<11> := 测量值, 标度化值M_ME_NB_1<12> := 测量值, 带时标的标度化值M_ME_TB_1<13> := 测量值, 短浮点数M_ME_NC_1<14> := 测量值, 带时标的短浮点数M_ME_TC_1<15> := 累计量M_IT_NA_1<16> := 带时标的累计量M_IT_TA_1<17> := 带时标的继电保护设备事件M_EP_TA_1<18> := 带时标的继电保护设备成组启动事件M_EP_TB_1<19> := 带时标的继电保护设备成组输出电路信息M_EP_TC_1<20> := 带变位检出的成组单点信息M_PS_NA_1<21> := 测量值, 不带品质描述词的规⼀化值M_ME_ND_1<22..29> := 为将来兼容定义保留<30> := 带CP56Time2a时标的单点信息M_SP_TB_1<31> := 带CP56Time2a时标的双点信息M_DP_TB_1<32> := 带CP56Time2a时标的步位置信息M_ST_TB_1<33> := 带CP56Time2a时标的32⽐特串M_BO_TB_1<34> := 带CP56Time2a时标的测量值, 规⼀化值M_ME_TD_1<35> := 带CP56Time2a时标的测量值, 标度化值M_ME_TE_1<36> := 带CP56Time2a时标的测量值, 短浮点数M_ME_TF_1<37> := 带CP56Time2a时标的累计量M_IT_TB_1<38> := 带CP56Time2a时标的继电保护设备事件M_EP_TD_1<39> := 带CP56Time2a时标的继电保护设备成组启动事件M_EP_TE_1<40> := 带CP56Time2a时标的继电保护设备成组输出电路信息M_EP_TF_1<41..44> := 为将来兼容定义保留在控制⽅向的过程信息类型标识=TYPE IDENTIFICATION:=UI8[1..8]<45..69>CON<45>:= 单点命令C_SC_NA_1 CON<46>:= 双点命令C_DC_NA_1 CON<47>:= 步调节命令C_RC_NA_1CON<48>:= 设定值命令, 规⼀化值C_SE_NA_1 CON<49>:= 设定值命令, 标度化值C_SE_NB_1 CON<50>:= 设定值命令, 短浮点数C_SE_NC_1 CON<51>:= 32⽐特串C_BO_NA_1 <52..69> := 为将来兼容定义保留在监视⽅向的系统命令类型标=TYPE IDENTIFICATION=:=UI8[1..8]<70..99><70>:= 初始化结束M_EI_NA_1<71..99>:= 为将来兼容定义保留在控制⽅向的系统命令类型标识=TYPE IDENTIFICATION:=UI8[1..8]<100..109>CON<100>:= 总召唤命令C_IC_NA_1 CON<101>:= 计数量召唤命令C_CI_NA_1 CON <102>:= 读命令C_RD_NA_1 CON<103>:= 时钟同步命令C_CS_NA_1CON<104>:= 测试命今C_TS_NA_1 注:在控制⽅向标上(CON) 的应⽤服务数据单元是被确认的应⽤服务,在监视⽅向形成镜像,但传送原因不同. 这些镜像的应⽤服务数据单元⽤来作为肯定/否定认可(验证) 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IEC101装置规约使用说明一、规约使用范围
二、规约可变选项
三、装置相关信息
无
四、装置可变选项
五、装置.txt文本配置方法
现场可以在“文本模板-IEC101装置v1.00”的基础上根据装置信息点表修改出组态需要的装置文本。
需要注意:
◆遥测:
每组最多配200条,超过200条另起一组,不足200条则不能另起一组,组号依次累加。
◆遥信:
每组最多配208条,超过208条另起一组,不足208条则不能另起一组,组号依次累加。
◆遥控:
每组最多配200条,超过200条另起一组,不足200条则不能另起一组,第一个遥控组的组号与装置可变选项中的“遥控起始组号”一致,后续组的组号依次累加。
◆遥调:
每组最多配200条,超过200条另起一组,不足200条则不能另起一组,第一个遥调组的组号与装置可变选项中的“遥调起始组号”一致,后续组的组号依次累加。
◆遥脉:
每组最多配200条,超过200条另起一组,不足200条则不能另起一组,组号依次累加。
◆档位:
每组最多配200条,超过200条另起一组,不足200条则不能另起一组,组号依次累加。
六、现场问题分析处理
七、修改历史。