四履带车辆转向性能仿真研究
履带车辆转向动力学仿真知识

履带车辆转向动力学仿真知识履带车辆转向动力学仿真是指通过计算机模拟履带车辆转向过程中的动力学特性。
这项仿真技术可以帮助工程师更好地理解和研究履带车辆在不同转向条件下的行为,并优化车辆设计和控制系统。
在履带车辆转向动力学仿真中,需要考虑的关键因素包括车辆的质量、转向系统的特性、轮胎与地面的摩擦系数等。
通过对这些因素进行建模和仿真,可以模拟出车辆在不同道路状况下的转向性能,包括转弯半径、侧滑角度、抓地力等。
在履带车辆转向动力学仿真中,常用的模型包括单轨模型和双轨模型。
单轨模型认为车辆仅在一个垂直于轨道的平面上运动,忽略车辆的纵向运动。
双轨模型则包括车辆的纵向运动,并考虑左右两侧履带之间的转弯差速。
履带车辆转向动力学仿真中,常用的仿真软件包括CarSim、ADAMS等。
这些软件提供了丰富的车辆模型和分析工具,可以模拟车辆在各种道路条件下的转向动力学,如直线行驶、转弯、制动等。
通过履带车辆转向动力学仿真,工程师可以评估不同转向系统设计的性能,并进行优化。
例如,可以通过仿真研究不同转向系统的刚度、行程、空转角度等参数对车辆的转向性能的影响。
此外,还可以研究不同摩擦系数下车辆的侧滑情况,并通过调整控制策略提高车辆的稳定性和灵活性。
总之,履带车辆转向动力学仿真是一项重要的技术,可以帮助工程师更好地理解和研究履带车辆的转向特性。
通过仿真研究,可以优化车辆的设计和控制系统,提高车辆的性能和可靠性。
履带车辆转向动力学仿真是一项复杂而关键的技术,对于履带车辆的设计、性能分析和控制优化具有重要意义。
本文将继续介绍履带车辆转向动力学仿真的相关内容,包括仿真模型、评估参数以及仿真结果的分析等。
一、仿真模型在履带车辆转向动力学仿真中,最基本的模型分为单轨模型和双轨模型。
单轨模型是将履带车辆简化为一个刚性运动体,并在一个垂直于车辆运动平面内进行建模,该模型忽略了车辆的纵向运动。
而双轨模型则考虑了车辆的纵向运动,并通过差速控制来模拟履带车辆的转向情况。
四轮转向车辆操纵稳定性仿真分析
宋凯凯▶◀……………………………………………………………………………四轮转向车辆操纵稳定性仿真分析前言随着科技的进步和汽车产业的发展,人们对于车辆操纵稳定性、舒适性和安全性的要求不断提高,四轮转向(Four-wheel steering ,4WS )作为一种有效改善车辆操纵性能的技术,吸引了国内外众多研究人员[1]。
使用4WS 技术的主要目的有:①减少车辆质心侧偏角β;②减少车辆横摆率与车辆横向加速度之间的相差;③增加轮胎横向力的裕度,使其远离饱和状态[2]。
运用4WS 技术可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速时行驶更加灵活、便于泊车。
同时,4WS 技术还可以大大地改善汽等瞬态响应指标,提高高速行驶时的操纵稳定性和舒适性[7]。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件[3]。
Simulink 是Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标[2]。
本文基于Matlab/simulink 对四轮转向车辆的控制系统进行了设计,并对4WS 车辆的操纵稳定性进行了仿真研究。
4WS 车辆运动数学模型4WS 车辆模型根据自由度不同可分为二自由度、三自由度以及多自由度模型。
高自由度车辆模型虽然能较好地反映出汽车的运行状况,但研究起来困难很大。
理论和实验都证明,F Y2F Y1δ2V 2a 1bavV C.Gβu ωV 1δ1a 1图1二自由度四轮转向汽车模型在正常车速的非紧急状态和小转向角情况下,包含横摆角速度和质心侧偏角的线性二自由度自行车模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作[4][8][10]。
《2024年履带式特种车辆精细化动力学建模与仿真》范文
《履带式特种车辆精细化动力学建模与仿真》篇一一、引言随着科技的进步和军事需求的不断增长,履带式特种车辆在各种复杂环境下的应用越来越广泛。
为了更好地理解其运动性能、优化设计以及提高仿真精度,精细化动力学建模与仿真成为了研究的热点。
本文旨在探讨履带式特种车辆精细化动力学建模与仿真的相关内容,为相关研究提供参考。
二、履带式特种车辆动力学建模1. 模型假设与简化在建立履带式特种车辆动力学模型时,为了简化问题,我们做出以下假设:车辆在平坦地面上行驶,不考虑空气阻力影响;履带与地面接触的力学关系为线性关系等。
2. 模型构建基于上述假设,我们采用多刚体动力学理论,结合履带式车辆的特性,建立其动力学模型。
该模型包括车辆底盘、履带、驱动系统等部分的运动学和动力学方程。
其中,履带与地面的相互作用力是模型的关键部分,我们采用弹簧-阻尼器模型来描述这种相互作用。
三、精细化建模的考虑因素在建立精细化动力学模型时,我们需要考虑以下因素:1. 履带与地面的摩擦力:不同地面的摩擦系数对车辆的运动性能有很大影响。
因此,我们需要根据实际地面条件,选择合适的摩擦系数。
2. 履带的弹性:履带在行驶过程中会产生一定的弹性变形,这会影响车辆的行驶稳定性和动力性能。
因此,在建模过程中需要考虑履带的弹性。
3. 驱动系统的动态特性:驱动系统的动态特性对车辆的加速、减速等性能有很大影响。
因此,我们需要建立准确的驱动系统模型,以反映其动态特性。
四、仿真分析在建立好动力学模型后,我们进行仿真分析。
通过改变地面条件、履带张力、驱动系统参数等,观察车辆的运动性能变化。
通过对比仿真结果与实际测试结果,验证模型的准确性。
同时,我们还可以通过仿真分析,优化车辆的设计,提高其运动性能。
五、结论本文针对履带式特种车辆精细化动力学建模与仿真进行了探讨。
通过建立多刚体动力学模型,并考虑履带与地面的相互作用力、履带弹性、驱动系统动态特性等因素,我们得到了较为准确的车辆动力学模型。
《2024年履带式特种车辆精细化动力学建模与仿真》范文
《履带式特种车辆精细化动力学建模与仿真》篇一摘要:本文着重于对履带式特种车辆进行精细化动力学建模与仿真。
文章首先介绍研究背景及意义,随后对现有研究进行了概述。
在理论模型建立过程中,我们通过合理的假设和科学的推导,提出了符合履带式特种车辆实际运动特性的动力学模型。
并通过先进的仿真技术,验证了模型的准确性。
本文的研究为提升特种车辆的行驶性能和安全性能提供了有力的理论依据和支撑。
一、引言随着科技的不断进步,特种车辆在军事、救援、工程等领域的应用越来越广泛。
履带式特种车辆因其良好的越野性能和适应复杂环境的能力,在各种极端环境中都能表现出良好的机动性。
然而,为了进一步提高其行驶性能和安全性能,深入研究其动力学特性及建立精细化动力学模型变得尤为重要。
本文将通过精细化动力学建模与仿真,探究履带式特种车辆的动态特性及行为规律。
二、研究背景与现状目前,国内外学者对履带式特种车辆的动力学研究主要集中在模型建立、仿真分析和实验验证等方面。
然而,由于履带式特种车辆的结构复杂,其动力学模型往往难以准确描述其实际运动特性。
因此,建立精细化动力学模型,对于提高特种车辆的行驶性能和安全性能具有十分重要的意义。
三、精细化动力学模型的建立3.1 模型假设与参数设定为了简化建模过程并准确反映履带式特种车辆的动态特性,我们进行了以下假设和参数设定:假设车辆行驶在平坦路面上,不考虑侧倾和俯仰等非线性因素;设定了包括履带张紧力、地面摩擦系数等在内的关键参数。
3.2 模型推导与建立基于动力学理论,我们推导出了符合履带式特种车辆实际运动特性的动力学模型。
该模型包括了车辆的驱动系统、转向系统、制动系统等关键部分的动力学方程。
通过这些方程,我们可以精确描述车辆在各种行驶条件下的动态特性。
四、仿真验证4.1 仿真环境搭建我们采用了先进的仿真软件,搭建了履带式特种车辆的仿真环境。
通过设定不同的路面条件、气象条件以及车辆载荷等参数,我们可以模拟出各种实际行驶场景。
四轮转向汽车操纵动力学虚拟仿真分析
四轮转向汽车操纵动力学虚拟仿真分析姓名 XX江苏大学京江学院车辆工程2班学号 XX[摘要]从机械动力学仿真的角度,研究4WS汽车的瞬态和稳态操纵动力学特性。
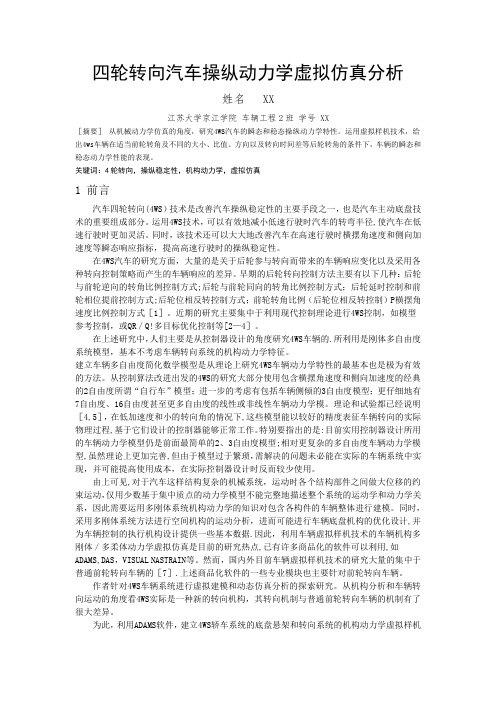
运用虚拟样机技术,给出4ws车辆在适当前轮转角及不同的大小、比值、方向以及转向时间差等后轮转角的条件下,车辆的瞬态和稳态动力学性能的表现。
关键词:4轮转向,操纵稳定性,机构动力学,虚拟仿真1 前言汽车四轮转向(4WS)技术是改善汽车操纵稳定性的主要手段之一,也是汽车主动底盘技术的重要组成部分。
运用4WS技术,可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速行驶时更加灵活。
同时,该技术还可以大大地改善汽车在高速行驶时横摆角速度和侧向加速度等瞬态响应指标,提高高速行驶时的操纵稳定性。
在4WS汽车的研究方面,大量的是关于后轮参与转向而带来的车辆响应变化以及采用各种转向控制策略而产生的车辆响应的差异。
早期的后轮转向控制方法主要有以下几种:后轮与前轮逆向的转角比例控制方式;后轮与前轮同向的转角比例控制方式;后轮延时控制和前轮相位提前控制方式;后轮位相反转控制方式;前轮转角比例(后轮位相反转控制)P横摆角速度比例控制方式[1]。
近期的研究主要集中于利用现代控制理论进行4WS控制,如模型参考控制,或QR/Q!多目标优化控制等[2—4]。
在上述研究中,人们主要是从控制器设计的角度研究4WS车辆的.所利用是刚体多自由度系统模型,基本不考虑车辆转向系统的机构动力学特征。
建立车辆多自由度简化数学模型是从理论上研究4WS车辆动力学特性的最基本也是极为有效的方法。
从控制算法改进出发的4WS的研究大部分使用包含横摆角速度和侧向加速度的经典的2自由度所谓“自行车”模型;进一步的考虑有包括车辆侧倾的3自由度模型;更仔细地有7自由度、16自由度甚至更多自由度的线性或非线性车辆动力学模。
理论和试验都已经说明[4,5],在低加速度和小的转向角的情况下,这些模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作。
基于RecurDyn的履带车辆高速转向动力学仿真研究

摘要 :采用多体动力学仿真软件 RecurDyn 的履带车辆子系统 Track ( HM) ,建立某型履带车辆多体动力学模型 ,对履带车 辆在硬 、软两种地面的高速转向过程进行动力学仿真和对比分析 ,着重讨论履带车辆在软地面高速转向的动力学特性 ,为 履带车辆转向性能的研究与高速转向的正确操作提供指导 。 关键词 :履带车辆 地面力学 转向 动力学仿真
Dynamic Simulation of Tracked Vehicle Turning at High Speed Based on RecurDyn
L U Jinjun , WEI Laisheng , ZHAO Taoshuo
Abstract : A 3D dynamical model of a certain t racked vehicle is created based on t he multi2body dynamic software RecurDyn/ Track ( HM) . The simulations of t he t racked vehicle t urning on hard and soft terrain are implemented respectively ,and t he re2 sult s are analyzed and compared. The steering p roperties of t racked vehicle t urning on soft terrain at a high speed are emp ha2 sized. The simulation result s can p rovide some t heoretical guidance fo r st udying t he steering characteristics of t racked vehicles at a high speed.
《2024年履带式特种车辆精细化动力学建模与仿真》范文

《履带式特种车辆精细化动力学建模与仿真》篇一一、引言随着科技的进步和军事需求的不断增长,履带式特种车辆因其卓越的越野能力和稳定性,在军事、救援和工程领域中扮演着重要角色。
对履带式特种车辆进行精细化动力学建模与仿真,不仅能够提升其设计效率和性能,还有助于对实际使用过程中的问题进行有效预测和解决。
本文旨在深入探讨履带式特种车辆的精细化动力学建模与仿真技术,以期为相关领域的研究提供一定的参考。
二、动力学建模(一)模型构建动力学建模是履带式特种车辆设计与仿真的基础。
针对履带式特种车辆的特性,采用多刚体动力学模型进行建模。
该模型考虑了车辆底盘、履带、负重轮等多个部分,并考虑了各部分之间的相互作用。
此外,还需考虑各种外界因素,如地面摩擦、地形坡度等。
(二)模型参数动力学模型中涉及的参数较多,主要包括各部分的质量、转动惯量、阻尼等。
这些参数需要通过实验或理论计算获得。
此外,还需考虑模型中的约束条件,如履带与地面的接触力、摩擦力等。
这些参数的准确获取对于保证模型的精度至关重要。
三、仿真分析(一)仿真环境仿真环境是仿真分析的基础。
本文采用专业的动力学仿真软件进行仿真分析,该软件可模拟各种地形和气候条件下的履带式特种车辆运动。
在仿真过程中,需根据实际需求设置仿真参数,如仿真时间、步长等。
(二)仿真结果通过仿真分析,可得到履带式特种车辆在不同地形和工况下的运动学参数和动力学参数。
这些参数包括速度、加速度、受力情况等。
通过对这些参数的分析,可了解车辆在不同条件下的性能表现,为车辆的优化设计提供依据。
四、精细化建模与仿真技术(一)精细化建模技术精细化建模技术是提高履带式特种车辆动力学模型精度的关键。
在建模过程中,需充分考虑车辆的几何形状、材料特性、外部干扰等因素对模型的影响。
此外,还需对模型进行验证和优化,以保证模型的精度和可靠性。
(二)仿真技术仿真技术是履带式特种车辆动力学仿真的核心。
在仿真过程中,需采用先进的算法和计算方法,以提高仿真的精度和效率。
四履带车辆稳态滑移转向特性研究
大连
1 6}2 1( 2
3 .北 方 重 工 集 团 有 限 公 司 ,辽 宁
[ 摘要 ] 建立 了 四履 带车 辆稳 态滑移 转 向特性 的数 学模 型 并 进行 了数值 求 解 ,利用 多 刚 体动 力 学软 件 Reu D n对某 一 四履带 车辆进 行 了虚拟样 机转 向仿 真实验 ,仿 真结 果与 理论 计 算 吻合 良好 。分 析 了履带 接 cr y 地 长度 与轨距 之 比对驱 动力 的影响 ,为 四履 带 车辆设 计提 供参考 。 [ 键词 ] 四履带 车辆 ;稳态 ;滑 移转 向 ;多 体动 力学 关
向时 ,通 过 限定 内 、外侧 履带 驱 动轮 的转 速实现 车
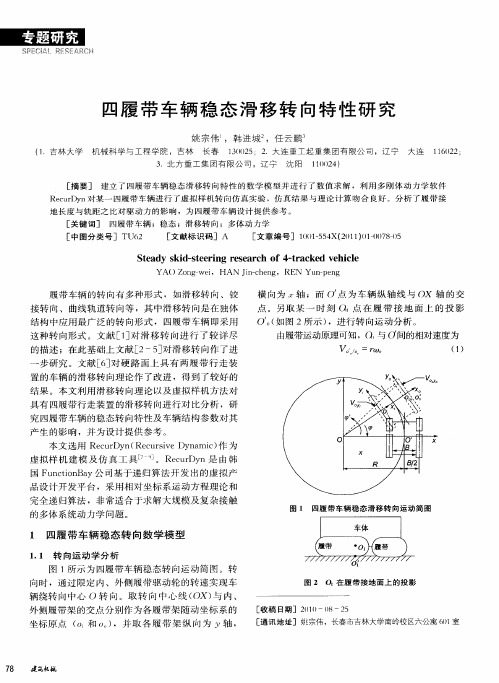
图 2 01在 履 带 接地 面 上 的 投 影
辆绕 转 向中心 ( 转 向。取 转 向 中 心 线 ( ) 内 、 ) ( 与 外侧履 带架 的交 点分 别作 为各 履带 架 随动 坐标 系的 坐标原 点 ( 0 ) 0 和 ,并 取 各 履 带 架 纵 向 为 轴 ,
[p e 图分 类号 ]TU6 2
[ 文献标 识码 ]A
[ 文章编 号] 1 0 —5 X(0 1 ( —0 80 0 15 4 2 1 ) 10 7 —5 )
S e dy s i - t e i g r s a c f4 ta k d v h c e t a k d s e rn e e r h o - r c e e il
完全 递 归算法 ,非 常适 合 于求解 大规 模及 复杂 接触
的多 体 系统动 力学 问题 。
图 1 四履 带 车 辆 稳 态 滑移 转 向运 动 简 图
l 四履 带 车 辆 稳 态转 向数 学 模 型
1 1 转 向 运 动 学 分 析 .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为便于分析, 分别取转向中 心 线 O X与 内、 外侧
履带架的交点作为各履带架随动坐标系的坐标原点 O ) , 并取各履带架纵向为 y 轴, 横向为 x 轴。 ( i和 O o 选取 某 一 时 刻 内 侧 履 带 架 上 O i点 在 履 带 接 地 面 上 的投影 O ′ i进行运动分析。 由履带运动原理可知, O ′ 间的相对速度为 i与 O i v =r ω i O ′ O
S t e e r i n gP e r f o r ma n c eS i mu l a t i o no f F o u r t r a c k e dV e h i c l e
1 , 2 1 1 L i Y o n g Y a oZ o n g w e i Wa n gG u o q i a n g
( 7 )
因此, 履带接地面上相对地面的速度为 v =v -v O ′ x Ox O ′ O
ii ii ii
( 3 )
μ=
μ w o
通过矢量法可以得到该时刻内侧履带的瞬时中 心O 以及瞬时转向半径 R 。 c 2 i
(
2 R 1+ B
)
n
R ( 1-R )
k
( 8 )
— — —中心转向阻力系数 式中 μ w o R — — —履带车辆自有转向半径, m k n — — —履带张 力 指 数, 一般在 0 2~0 5范 围 内选取
1 3 ] H o c k推荐了 μ的计算公式 [
式中 R — — —转向半径, m B — — —轨距, m ′ — — —车辆转动角速度, r a d / s φ
( 6 )
图2 转向时内、 外侧履带速度分析图 F i g . 2 V e l o c i t ya n a l y s i s o f i n n e r a n do u t e r t r a c k s i ns t e e r i n g
9 ] , 得到 了 较 好 的 结 果。 但 对 于 四 履 带 进行了修正 [
引言 大型 履 带 行 走 装 置 因 具 有 接 地 比 压 低、 工作环 境适应性强等优点而用于斗轮挖掘机、 排土机、 破碎 站等大型移动 式 运 输 设 备。 同 时 由 于 工 作 载 荷 大, 大型履带行走装置 需 要 配 备 高 功 率 的 驱 动 系 统; 而 驱动系统的成本和与其匹配的部件要求也随着功率 的提高而急剧加大。 目前, 对三履 带、 六 履 带 行 走 装 置 的 研 究 较 多, 并 取 得 了 一 定 成 果, 但对四履带的研究并不多
收稿日期:2 0 1 0 0 8 1 6 修回日期:2 0 1 0 1 0 1 0 8 6 3计划) 资助项目( 2 0 0 7 A 0 4 Z 1 2 6 ) 国家高技术研究发展计划(
[ 8 ]
作者简介:李勇, 博士生, 徐州工程机械科技股份有限公司高级工程师, 主要从事现代设计理论与方法研究, E m a i l :l i y o n g _ 0 5 1 8 @1 2 6 . c o m 通讯作者:王国强, 教授, 博士生导师, 主要从事现代设计理论与方法研究, E m a i l :w g q @j l u . e d u . c n
1 0~ 1 2 ] 虚拟样机建模及仿真工具 [ , 对数学模型进行 仿
真对比分析, 研究其稳态转向性能, 为四履带车辆的 设计提供参考。
1 四履带车辆稳态转向数学模型
1 1 运动学分析 图 1所示为四履带车辆稳态转向运动简图。 转 向时, 通过限定内、 外侧履带驱动轮的转速使履带相 对履带架具有不同的速 度, 从 而 实 现 车 辆 绕 O点 转
ii
( 1 )
式中 r — — —驱动轮节圆半径, m — — —内侧驱动轮角速度, r a d / s ω i 该 速 度 即 为 履 带 接 地 面 相 对 于 履 带 架 的 速 度。 为 而履带架相对于地面的速度如图 2所示, v = R- Ox
ii
图3 转向受力分析简图 F i g . 3 S t r e s s a n a l y s i s d i a g r a mo f s t e e r i n g
第 2期 李勇 等:四履带车辆转向性能仿真研究
3 5
向。改变转速差可以实现不同半径的转向。
式中 b — — —履带宽度, m 即 R R- i= ω B r i - 2 φ ′ ( 4 )
同理可得外侧履带接地面瞬时转向半径 r ω B o R -R- o= ′ 2 φ ( 5 )
理论上对滑移转向 问 题 进 行 了 较 为 详 尽 的 描 述; 在
[ 5 ] [ 6 ] [ 7 ] 其基础上 We i s s 、 C r o s h e c k 、 K i t a n o和 J y o z a k i 、
E h l e r t 等都对滑移转向 进 行 了 研 究。 Wo n gJY 对 硬路面上具有两履带行走装置车辆的滑移转向理论
A b s t r a c t B a s e do nt h ec h a r a c t e r i s t i c so f f o u r t r a c k e dv e h i c l e s ,t h em a t h e m a t i c a l m o d e l o f s t e a d ys t e e r i n go n ,c o n s i d e r i n gt h ec r a w l e rw i d t ha n ds k i d s t e e r i n g .T h ei n f l u e n c e so ft h e f i r mg r o u n dw a se s t a b l i s h e d f a c t o r s o nt h es t e e r i n gp e r f o r m a n c ew e r ea n a l y z e d .T h ev i r t u a l p r o t o t y p eo f af o u r t r a c k e dv e h i c l ew a s b u i l t b a s e do nt h em u l t i b o d yd y n a m i c ss o f t w a r eR e c u r D y na n dt h es t e e r i n gt e s t sw e r ec o m p l e t e d .T h e v i r t u a l p r o t o t y p es i m u l a t i o nr e s u l t s a c c o r d e dw e l l w i t ht h en u m e r i c a l r e s u l t s ,w h i c hv e r i f i e dt h ec o r r e c t i o n o f t h et h e o r e t i c a l m o d e l . Ke yw o r d s F o u r t r a c k e dv e h i c l e ,S t e e r i n g ,N u m e r i c a l s i m u l a t i o n ,Ma t h e m a t i c a l m o d e l
由此可知, 在转向时内、 外侧履带需要完成围绕 各自 瞬 时 中 心 的 旋 转 运 动 和 沿 各 自 随 动 坐 标 系 ( x O y O y ) 纵向的滑移运动。 i i i和 x o o o 1 2 转向力学分析 为简化分 析, 作 如 下 假 设: ①履带接地比压均 匀。 ② 不计离心力的影响。
2011年 2月
农 业 机 械 学 报
第4 2卷 第 2期
四履带车辆转向性能仿真研究
, 2 李 勇1 姚宗伟 1 王国强 1
( 1 . 吉林大学机械科学与工程学院,长春 1 3 0 0 2 5 ;2 . 徐州工程机械科技股份有限公司,徐州 2 2 1 0 0 5 ) 【 摘要】 针对四履带车辆特点, 建立了考虑履带宽度以及滑转、 滑移的四履带车辆稳态转向数学 模 型, 并对模 e c u r D y n对 某 四 履 带 车 辆 型进 行 了 数 值 求 解, 分 析 了 各 因 素 对 其 稳 态 转 向 性 能 的 影 响。 基 于 多 刚 体 动 力 学 软 件 R 进行了虚拟样机转向仿真试验, 仿真结果与理论计算吻合较好, 证明模型具有较高的可靠性。 关键词:四履带车辆 转向 数值模拟 数学模型 中图分类号:S 2 1 9 2 文献标识码:A 文章编号:1 0 0 0 1 2 9 8 ( 2 0 1 1 ) 0 2 0 0 3 4 0 5
1~ 3 ] [ 4 ] 见[ , 对其稳态转向性能的研究很少。 S t e e d s 在
的转向问题, 目 前 尚 无 可 直 接 借 鉴 的 数 学 模 型。 本 文考虑包括履带宽 度 在 内 的 各 种 影 响 因 素, 建立四 履带行走装置的稳 态 转 向 数 学 模 型, 采用阻尼牛顿 法对数学模型进行数值求解; 并针对工程实际, 利用 虚拟样机技术, 采用动力学仿真软件 R e c u r D y n作 为
图1 四履带车辆稳态转向运动简图 F i g . 1 S t e a d ys t e e r i n gs c h e m a t i cd i a g r a mo f f o u r t r a c kv e h i c l e
以内侧 履 带 接 地 面 上 任 意 一 微 元 ( x , y ) 为对 i i 象进行受 力 分 析。 该 微 元 与 地 面 间 的 摩 擦 力 与 x i 正方向间的夹角为 δ , 如图 3所示。 i
(
B b b R- - ′ -r φ ω i R i- 2 2 2 = B R i R- ′ -r φ ω i 2
)