大华机器视觉工业镜头及配件选型表
远心镜头如何进行参数选型

远心镜头如何进行参数选型远心镜头是一种用于工业视觉领域的光学镜头,广泛应用于机器视觉、自动化检测等领域。
在选择远心镜头时,需要考虑许多参数,包括工作距离、视场角、焦距等。
本文将详细介绍远心镜头参数的意义和选择方法。
工作距离远心镜头的工作距离,也叫作工作距,指的是从镜头到被测物体的最短距离。
不同的远心镜头工作距离不同,通常在100mm至300mm之间。
选择工作距离需要考虑被测物体的大小和工作场景的环境。
如果被测物体较小,比如小于50mm,那么工作距应该选择较小的镜头,以保证能够清晰地观察被测物体。
如果被测物体较大,那么就需要选择较大的工作距离的镜头。
此外,工作场景的环境也应该考虑,如果环境狭小,需要选择较短的工作距离镜头。
视场角视场角是指镜头所能捕获到的场景大小,通常用度数来表示。
例如,30mm镜头的视场角能够捕获到400mm×300mm的场景。
视场角与焦距有关,焦距越大,视场角越小,焦距越小,视场角越大。
在选择视场角时需要考虑被测物体的大小和工作场景,如果被测物体较小,则需要选择较小的视场角,以便捕获到被测物体的全部内容。
如果被测物体较大,则需要选择较大的视场角,以便在一定距离内捕获到其全部内容。
此外,还需要考虑工作场景是否需要全景视野,如果需要,则需要选择大视场角的远心镜头。
焦距远心镜头的焦距是指镜头的焦点到像面的距离。
焦距越大,放大率越小,视场角越小。
焦距和工作距离有关,通常,大工作距离的远心镜头焦距也会相对较大。
在选择焦距时,需要考虑被测物体的大小、所需放大率和工作距离。
如果比较小的被测物体需要高放大率时,需要使用较大焦距的远心镜头。
如果远心镜头所需工作距离较远,则需要使用较大焦距的镜头来压缩远心镜头的感光面积。
其他参数除了工作距离、视场角和焦距,还有许多其他参数需要考虑。
例如,光学畸变需要保持在一定范围内,否则会影响成像效果;分辨率需要达到应用要求;光学线性度需要保持在一定水平。
机器视觉技术与应用实战-FA镜头和远心镜头

芯镜头
《机器视觉技术与应用实战》
FA镜头参数介绍
下表是一款500万分辨率镜头参数说明,可以支持2/3以下传感器芯片尺寸的相机。
《机器视觉技术与应用实战》
镜头的辅助器件
1 扩焦镜:安装在镜头和相机之间,改变焦距,但是物距不变。
《机器视觉技术与应用实战》
镜头的辅助器件
2 近摄接圈:安装在镜头和相机之间,可单独或者组合使用,是近距离成像的有效辅助配件。
FA镜头一般有定焦镜头和变焦镜头,定焦镜头有对焦调节环和光圈调节环,变焦镜头则会多一个变焦调 节环如下图
《机器视觉技术与应用实战》
FA镜头的选型
选择FA镜头需要考虑以下几点,FA镜头能否满足技术要求 工作距离 景深 视野 分辨率 畸变 FA镜头能否满足技术要求 1)被测量物体是否在同一个测量平面,不在同一平面放大倍率是不同的。 2)FA镜头畸变小于1%是否影响检测结果 3)视差也就是当物距变大时,FA镜头对物体的放大倍数也会改变; 4)FA镜头镜头的解析度能不能满足要求; 5)由于视觉光源的几何特性,而造成的图像边缘位置的不确定性。不适当光源干扰下造成边界的确定性
《机器视觉技术与应用实战》
《机器视觉技术与应用实战》
(4) 镜头的视野 视野 (Field of view):简称FOV,或者叫视场角,图像采集设备所能够覆盖的范围,即和靶面上的图像所对应 的物平面的尺寸;前面介绍过它和工作距离,镜头焦距和相机传感器芯片尺寸有关。相机标定和视觉精度也 需要视野的准确尺寸。
工业镜头主要参数与选型
工业镜头主要参数与选型一、镜头主要参数1.焦距(Focal Length)焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。
焦距的大小决定着视角的大小,焦距数值小,视角大,所观察的范围也大;焦距数值大,视角小,观察范围小。
根据焦距能否调节,可分为定焦镜头和变焦镜头两大类。
2.光圈(Iris)用F表示,以镜头焦距f和通光孔径D的比值来衡量。
每个镜头上都标有最大F值,例如8mm/F1.4代表最大孔径为 5.7毫米。
F值越小,光圈越大,F值越大,光圈越小。
3.对应最大CCD尺寸(Sensor Size)镜头成像直径可覆盖的最大CCD芯片尺寸。
主要有:1/2″、2/3″、1″和1″以上。
4.接口(Mount)镜头与相机的连接方式。
常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75等。
5.景深(Depth of Field,DOF)景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。
景深随镜头的光圈值、焦距、拍摄距离而变化。
光圈越大,景深越小;光圈越小、景深越大。
焦距越长,景深越小;焦距越短,景深越大。
距离拍摄体越近时,景深越小;距离拍摄体越远时,景深越大。
6.分辨率(Resolution)分辨率代表镜头记录物体细节的能力,以每毫米里面能够分辨黑白对线的数量为计量单位:“线对/毫米”(lp/mm)。
分辨率越高的镜头成像越清晰。
7、工作距离(Working distance,WD)镜头第一个工作面到被测物体的距离。
8、视野范围(Field of View,FOV)相机实际拍到区域的尺寸。
9、光学放大倍数(Magnification,ß)CCD/FOV,即芯片尺寸除以视野范围。
10、数值孔径(Numerical Aperture,NA)数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a\2)的正弦值的乘积,计算公式为N.A=n*sin a/2。
工业相机镜头地全参数与选型

工业相机镜头地全参数与选型工业相机镜头是工业自动化领域中重要的设备之一,广泛应用于机器视觉、智能检测、无损检测等领域。
在选购工业相机镜头时,需要考虑到相机的应用环境、被测物体的特性以及相机镜头的参数。
本文将介绍工业相机镜头的全参数并进行选型分析。
一、工业相机镜头的全参数1.焦距(Focal Length):焦距是镜头将光线聚焦的能力。
不同的焦距会影响镜头的视角和放大倍数。
一般来说,较长焦距的镜头具有较大的放大倍数和较小的视角,适合远距离拍摄;较短焦距的镜头具有较小的放大倍数和较大的视角,适合近距离大范围拍摄。
2.镜头结构(Lens Structure):镜头的结构包括透镜的数量和排列方式。
常见的结构有单透镜结构、双透镜结构、复合透镜结构等。
不同的结构会影响成像质量、畸变程度和成本。
3.光圈(Aperture):光圈控制着进入相机的光线量,它是一个由多个薄片组成的机械装置。
可以通过调节光圈的大小来控制曝光量和景深。
较大的光圈适合拍摄光线较暗的场景,提高曝光量;较小的光圈适合拍摄光线较亮的场景,提高景深。
4.最小对焦距离(Minimum Focus Distance):最小对焦距离是指物体与镜头的最小距离,也是相机能够聚焦的最小距离。
镜头的最小对焦距离直接影响镜头的应用范围,较小的最小对焦距离适合拍摄微小物体,较大的最小对焦距离适合拍摄大型物体。
5.最大光学放大倍率(Maximum Optical Magnification):最大光学放大倍率是镜头能够放大物体的倍数。
较大的光学放大倍率可以提高图像的清晰度和细节,适合拍摄对细节要求较高的场景。
6.视场角(Field of View):视场角是指从相机镜头看到的场景范围。
它受到镜头焦距、相机感光元件尺寸和被测物体距离的影响。
一般来说,较长焦距的镜头具有较小的视场角,较短焦距的镜头具有较大的视场角。
7.图像传感器尺寸(Image Sensor Size): 图像传感器尺寸是指相机感光元件的尺寸。
机器视觉中用工业镜头与工业相机CCD选型指导手册道

机器视觉中用工业镜头与工业相机CCD选型指导手册道镜头的参数指标光学镜头一般称为摄像镜头或摄影镜头,简称镜头,其功能就是光学成像。
在机器视觉系统中,镜头的主要作用是将成像目标聚焦在图像传感器的光敏面上。
镜头的质量直接影响到机器视觉系统的整体性能;合理选择并安装光学镜头,是机器视觉系统设计的重要环节。
1.镜头的相关参数1焦距焦距是光学镜头的重要参数,通常用 f 来表示。
焦距的大小决定着视场角的大小,焦距数值小,视场角大,所观察的范围也大,但距离远的物体分辨不很清楚;焦距数值大,视场角小,观察范围小,只要焦距选择合适,即便距离很远的物体也可以看得清清楚楚。
由于焦距和视场角是一一对应的,一个确定的焦距就意味着一个确定的视场角,所以在选择镜头焦距时,应该充分考虑是观测细节重要,还是有一个大的观测范围重要,如果要看细节,就选择长焦距镜头;如果看近距离大场面,就选择小焦距的广角镜头。
2光阑系数即光通量,用 F 表示,以镜头焦距 f 和通光孔径 D 的比值来衡量。
每个镜头上都标有最大 F 值,例如6mm/F1.4 代表最大孔径为 4.29 毫米。
光通量与 F 值的平方成反比关系,F 值越小,光通量越大。
镜头上光圈指数序列的标值为 1.4,2,2.8,4,5.6,8,11,16,22 等,其规律是前一个标值时的曝光量正好是后一个标值对应曝光量的 2 倍。
也就是说镜头的通光孔径分别是 1/1.4,1/2,1/2.8,1/4,1/5.6,1/8,1/11,1/16,1/22,前一数值是后一数值的根号 2 倍,因此光圈指数越小,则通光孔径越大,成像靶面上的照度也就越大。
3景深摄影时向某景物调焦,在该景物的前后形成一个清晰区,这个清晰区称为全景深,简称景深。
决定景深的三个基本因素: 光圈光圈大小与景深成反比,光圈越大,景深越小。
焦距焦距长短与景深成反比,焦距越大,景深越小。
物距物距大小与景深成正比,物距越大,景深越大。
浙江大华产品配件选型参考手册_前端篇_20111124
靶面尺寸 X(mm)
1/2 inch 6.4
1/3 inch 4.8
1/4 inch 3.6
Y(mm)
4.8
3.6
2.7
举例说明: 以1/3 inch的镜头为例,物距L=10米,若想看到高度为4.5米的物体,则要 选用8mm焦距的镜头。
镜头的常见品牌
精工
腾龙
锐利
富士能
标清镜头选型参考
标清镜头推荐
百万像素镜头推荐
高清镜头推荐
高清镜头推荐
内容提要
1
镜头
2
3 4
防护罩
支架
线缆
防护罩原理
防护罩是监控系统中重要的组件,它是使摄像机在有灰尘、雨水、高低温等 情况下正常使用的防护装置。
(一)室内型防护罩
(二)室外型防护罩
枪型防护罩
球型防护罩
(一)半球型防护罩
(二)全球型防护罩
特殊防护罩
制作工具
网线制作
监控接头制作
电烙铁
网线钳
焊锡丝 网络测线仪
谢 谢
聚焦调节
聚焦,指将焦点准确的定位在传感器(CCD戒CMOS)上,使图像更加清晰。
聚焦前
聚焦后
手劢聚焦,指通过镜头上的聚焦环进行手劢操作。 自劢聚焦,指通过镜头本身的精密计算,在图像发生变化时,进行自劢聚焦。
光圈调节
光圈是一个用来控制光线透过镜头,进入机身内感光面的光量的装置,根据 周围环境的明暗程度来控制进光量,从而达到光强适合的效果,相当于人的 瞳孔。
光圈F值 = 镜头的焦距 / 镜头口径的直径 F值越小,光圈就越大,在单位时间内的进光量便越多。
光圈作用
通过光圈的调节,达到 准确曝光的目的
大华解决方案及配置选型

单路视频每天录像 单路视频30天录
文件大小 GB
像文件大小 TB
21
0.61
26.4
0.77
硬盘录像机选择应综合接入路数和存储容量考虑, 即录像机的接入路数要大于等于摄像机数量,可使用硬盘容量要大于等于实际 使用存储的容量,
一般硬盘的利用率在90%左右,即一块1T的硬盘,实际能使用的容量只有900G 左右,
网络硬盘录像机输出:网络信号 网口 音频输出、报警输出 开关量
解码视频输出 BNC/VGA/HDMI
控制接口:RS485 不用于球机控制 RS232
各设备信号输入输出类型
编码器
编码器输入:模拟视频输入 BNC接口
编码器输出:网络信号 网口
各设备信号输入输出类型
解码器
解码器输入:网络信号 网口
解码器输出:模拟视频信号 BN拟摄像机
非红外
模拟摄像机
枪机 半球 球机 枪机 半球 球机
480线 540线 600线 700线 750线
480线 540线 600线 700线 750线
红外枪机、半球均标配镜头、 护罩,故不需再选;
非红外枪机一般都不配镜头、 护罩,需另配;
球机都自带镜头、护罩、云台;
模拟枪机、半球只需连接电源 线、视频线即可;
开阔场地、监控范围较广:使用球机监控
枪机与半球监控效果一样,根据现场环境、安装难易决定 枪机最少要使用支架,可以立杆架装、壁装、吊顶安装 半球一般使用天花板安装或墙面侧装
枪机、半球安装后镜头角度、视场固定不变,使用在重要且紧急的场所,要求 始终要有监控画面的地方; 球机安装后可以转动、变倍,使用在重要但不紧急的场所,转动 、变倍后只能 监看一部分场景
机器视觉选型相机规则
机器视觉选型相机规则机器视觉是一种模拟人眼进行图像识别和处理的技术,广泛应用于工业自动化、无人驾驶、安防监控等领域。
而相机作为机器视觉的重要组成部分,其选型规则对于机器视觉系统的性能和稳定性具有关键影响。
本文将从分辨率、帧率、感光元件、镜头、接口等方面介绍相机选型的规则。
一、分辨率相机的分辨率是指图像的像素数量,通常用横向像素数和纵向像素数表示。
分辨率越高,图像细节越丰富,但也会增加图像处理的计算量。
在选择相机分辨率时,需根据实际应用场景和需求来确定,避免过高或过低的分辨率。
二、帧率帧率是指相机每秒传输的图像帧数,常用单位为fps(Frames Per Second)。
帧率越高,图像的连续性越好,适用于高速运动物体的检测和追踪。
但高帧率相机通常价格昂贵,且会增加数据处理的复杂度。
三、感光元件感光元件是相机的核心部件,决定了图像的质量和灵敏度。
常见的感光元件有CCD和CMOS两种。
CCD感光元件具有较高的图像质量和低噪声特性,适用于对图像质量要求较高的应用场景;而CMOS感光元件则具有低功耗、高速度、集成度高等优势,适用于对帧率要求较高的应用场景。
四、镜头镜头是相机的光学系统,直接影响图像的清晰度和视场范围。
选择镜头时,需考虑焦距、光圈、视场角等参数。
焦距决定了镜头的放大倍数,光圈决定了镜头的透光能力,视场角决定了镜头的拍摄范围。
根据实际需求,选择合适的镜头参数,以获得清晰、准确的图像。
五、接口相机与其他设备的连接通常通过接口完成,常见的接口有USB、GigE、Camera Link等。
USB接口简单易用,适用于小型相机和低带宽应用;GigE接口具有较高的传输速度和稳定性,适用于大带宽应用;Camera Link接口则适用于对图像传输速度和稳定性要求较高的应用。
总结起来,机器视觉选型相机的规则包括分辨率、帧率、感光元件、镜头和接口。
在选型时,需根据实际应用需求和预算来确定各项参数。
同时,还需要考虑相机的稳定性、可靠性和兼容性等因素,以确保机器视觉系统的正常运行和性能表现。
02-2018年视觉设备选型指南

P1 SCI智能相机
P27 SCI-Q2
P33
SCI-Q3视觉控制器
新品
SCI通用配件
SciVision视觉开发包
外形迷你,低畸变,大景深满足大部分系统 应用需求。
DS系列迷你远心镜头
P64
低畸变,高分辨率远心设计,支持200万像素 2/3" 工业相机。
DT系列标清/MH系列高清远心镜头 P68
标准C接口,远工作距离的选择,最长工作距 离可达420mm。
P222
体积小,携带方便,模拟调节电压控制亮度,外 部触发同步频闪,DIN导轨安装。
OPT- APM0524B-2
P224
XIII
OPT产品选型指南
OPT代理相机
OPT相机
BASLER相机
POINT GREY相机
OPT相机
P227 BASLER相机
E2V相机
P228 POINT GREY相机
P231
OPT-RIP系列
P142
采用大功率LED设计,亮度可达普通光源三倍 以上,适用于远工作距离照明。
OPT-RIG系列
P144
同轴面状光源,具备无影光和同轴光效果。
OPT-FC系列
P146
OPT产品选型指南
OPT标准光源
平行集光光源
新品
平行光源
平行同轴光源
新品
多重透镜组合设计,平行度达到单边0.5°,消光 方式独特,消光效果良好,更有利于实际应用。
OPT-XX-IR系列
P153
近紫外385nm、365nm波段照明,形状和照射 方式可自由定制。
OPT-XX-UV系列
P157
采用大功率紫外LED,高亮度,低衰减。
视觉检测套件产品报价单

报价编号:
日期: 共 1 页
1
视觉检测套件产品报价单
注:
1、以上硬件报价均含税价格;
2、相机没有现货,货期1周。
序号
产品名称
图片
规格及性能参数
数量
单价(元)
备注
1
130万像素工业相机/ acA1300-60gc
德国130万像素千兆网工业相机,
60fps ,全局曝光,1/1.8英寸CMOS ,1280x960像素, 高信噪比,TTL 电平HD/VD 同步输入或输出,外部异步触发,C-mount 安装,体积29×29×44mm
1
2
200万像素工业镜头/H0614J
工业镜头,焦距6mm , 2/3”、可变光圈、低畸变、C-mount 接口。
1
3 条型光源/LI500X30
长度500mm ,宽度30mm ,电压24v 2
4 光源控制器
1 控制频闪
总价
To :
单位名称: 收 件 人: 电 话: 邮 箱: From :
单位名称: 发 件 人: 电 话: 传 真:。
工业相机与镜头选型方法(含实例)
工业相机与镜头选型方法(含实例)一、根据应用需求选型工业相机与镜头的选型首先要根据实际应用需求来确定。
应该明确拍摄的对象、需要的图像质量、成像速度等方面的要求。
例如,是否需要高分辨率的图像、是否需要高速连续拍摄、是否需要逆光环境下的高动态范围等等。
根据这些需求,可以确定所需要的传感器规格和镜头类型。
二、根据传感器规格选型传感器规格是工业相机选型的重要依据之一、传感器的大小直接影响到成像的角度、分辨率和噪声水平。
常见的传感器规格有1/2.3英寸、1/1.8英寸、2/3英寸、1英寸以及APS-C和全画幅等。
一般而言,传感器越大,成像角度越大,分辨率越高,噪声水平越低。
根据应用需求,选择合适的传感器规格。
实例一:如果应用需求是需要拍摄大范围场景,例如工业检测、机器视觉等,可以选择传感器规格较小的相机,例如1/2.3英寸传感器。
实例二:如果应用需求是需要高分辨率的图像,例如精细检测、高精度测量等,可以选择传感器规格较大的相机,例如APS-C或全画幅传感器。
三、根据镜头类型选型根据传感器规格确定之后,接下来要选择合适的镜头类型。
工业相机通常有固定焦距镜头、变焦镜头和特殊用途镜头等类型。
固定焦距镜头一般适合需要固定场景的拍摄,一般具有较高的分辨率和较低的畸变等特点。
变焦镜头适用于需要不同焦距的应用,具有变焦范围广、灵活性高的特点。
特殊用途镜头适用于特殊的应用场景,例如近距离测量、显微镜观察等。
实例三:如果应用场景需要拍摄不同物体的细节,例如高精度检测、PCB检测等,可以选择具有高分辨率和低畸变的固定焦距镜头。
实例四:如果应用场景需要拍摄不同距离的对象,例如检测机器人、机器视觉等,可以选择具有变焦范围广的变焦镜头。
四、根据镜头参数选型在确定镜头类型之后,还需要根据具体应用的需求选择合适的镜头参数,包括焦距、光圈和视场角等。
焦距是指镜头的焦距长度,影响到成像的角度和视场大小。
一般而言,焦距较短的镜头可以拍摄宽广的场景,焦距较长的镜头可以拍摄较小的视场。
机器视觉工业镜头计算方法

工业镜头基本参数(二)
2009年3月28日艾菲特光电
四.工业镜头的视角,焦距?
焦距的大小决定着视场角的大小,焦距数值小,视场角大,所观察的范围也大,但距离远的物体分辨不很清楚;焦距数值大,视场角小,观察范围小,只要焦距选择合适,即便距离很远的物体也可以看得清清楚楚。由于焦距和视场角是一一对应的,一个确定的焦距就意味着一个确定的视场角,所以在选择镜头焦距时,应该充分考虑是观测细节重要,还是有一个大的观测范围重要,如果要看细节,就选择长焦距镜头;如果看近距离大场面,就选择小焦距的广角镜头。
三.镜头的光圈,F值?
光圈的主要作用是通过控制镜头光量的大小满足成像所需的合适照度。光圈越大,靶面成像照度越大,摄像机输出信号强度越大,信噪比越高。?
可以理解,通光孔径越大,通过的光量越大;但我们关心的是到达芯片的光量,而焦距越长,意味着芯片离镜头中心越远,相应的光就越弱,所以,标准光圈大小的参数应该与两个变量有关,孔径,焦距。?
光圈系数,即F值即是用来来表征光圈的大小的参数。它等于镜头焦距f和通光孔径D之比。光通量与F值的平方成反比关系,F值越小,光通量越大。F值的规律是后一个值正好是前一个数值的√2 倍,所以,光圈调大一挡,光量减少2倍。常用值为1.4、2、2.8、4、5.6、8、11、16、22等几个等级。
一般光圈都可以调节,从而有手动光圈(manual iris)和自动光圈(autoiris)之分。?
监控相机一般都比较小,甚至小于1/3英寸;工业相机稍微大一些,一般1/2英寸到1英寸不等;传统的135相机底片比当前的一般感光芯片都大,36mm×24mm(1.4英寸×0.9英寸),画面对角线长度为43mm(1.7英寸),即是1.7英寸的,120中幅相机,其感光面尺寸有三种:45×60mm、60×60mm和90×60mm,可见画幅更大。
工业相机选型知识
工业相机选型知识1.1.1 机器视觉原理机器视觉是利用机器代替人眼进行测量和判断的技术。
机器视觉系统通过图像摄取装置(分为CMOS和CCD两种)将被摄取目标转换成图像信号,并传递给专用的图像处理系统。
该系统根据像素分布、亮度、颜色等信息将图像信号转换成数字化信号,并对这些信号进行各种运算以抽取目标的特征。
最终,根据判别的结果,控制现场设备的动作。
2.1.1 视觉系统组成部分视觉系统主要由以下部分组成:1.照明光源2.镜头3.工业摄像机4.图像采集/处理卡5.图像处理系统6.其它外部设备2.1.1.1 工业摄像机工业摄像机具有高的图像稳定性、高传输能力和高抗干扰能力等优点。
目前市面上的工业相机大多基于CCD或CMOS芯片。
CCD是目前机器视觉最为常用的图像传感器,它集光电转换及电荷存贮、电荷转移、信号读取于一体。
典型的CCD相机由光学镜头、时序及同步信号发生器、垂直驱动器、模拟/数字信号处理电路组成。
CMOS图像传感器的开发最早出现在20世纪70年代初,90年代初期,随着超大规模集成电路(VLSI)制造工艺技术的发展,CMOS图像传感器得到迅速发展。
CMOS图像传感器将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上,还具有局部像素的编程随机访问的优点。
目前,CMOS图像传感器以其良好的集成性、低功耗、高速传输和宽动态范围等特点在高分辨率和高速场合得到了广泛的应用。
要根据应用需要来确定。
一般来说,分辨率越高,图像越清晰,但同时也会增加成本和处理时间。
因此,需要根据具体应用的需求来选择合适的分辨率。
3、根据应用场景来选择相机的输出信号方式。
如果需要进行高质量的图像处理算法,建议选择输出裸数据的工业相机。
如果只是进行一般的图像拍摄,数字相机就可以满足需求。
4、根据应用场景来选择相机的响应频率范围。
如果需要拍摄可见光范围外的图像,需要选择红外或紫外相机。
总之,选择合适的工业相机需要根据具体的应用需求来确定,需要考虑分辨率、输出信号方式、响应频率范围等因素。
工业相机镜头地全参数与选型

工业相机镜头的参数与选型一、?镜头主要参数1.焦距(FocalLength)焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。
焦距的大小2.用FF值越3.1″以上。
4.镜头与相机的连接方式。
常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75等。
5.景深(DepthofField,DOF)景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。
景深随镜头的光圈值、焦距、拍摄距离而变化。
光圈越大,景深越小;光圈越小、景深越大。
焦距越长,景深越小;焦距越短,景深越大。
距离拍摄体越近时,景深越小;距离拍摄体越远时,景深越大。
6.分辨率(Resolution)78910数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a\2)的正弦值的乘积,计算公式为N.A=n*sina/2。
数值孔径与其它光学参数有着密切的关系,它与分辨率成正比,与放大率成正比。
也就是说数值孔径,直接决定了镜头分辨率,数值孔径越大,分辨率越高,否则反之。
11、后背焦(Flangedistance)准确来说,后倍焦是相机的一个参数,指相机接口平面到芯片的距离。
但在线扫描镜头或者大面阵相机的镜头选型时,后倍焦是一个非常重要的参数,因为它直接影响镜头的配置。
不同厂家的相机,哪怕接口一样也可能有不同的后倍焦。
1.2.3.4.远心镜头是为纠正传统镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化。
远心镜头与传统镜头对比,如图:远心镜头又分为物方远心和双侧远心两种,如图:机器视觉的镜头选择创造不同机器视觉为工业控制系统增加了新的维度,它可以提供装配线上零件的尺寸、位置和方向。
而合适的镜头选择对于机器视觉能否发挥应有的作用是非常重要的。
面和颜色。
对于食品检测系统,产品的尺寸、颜色、密度和形状都需要依靠多元检测才确定。
多元机器视觉系统既可以是彩色相机也可以是黑白相机,通常使用结构照明方法建立产品外表和内在结构。
机器视觉之工业镜头的选型公式(附CCD芯片尺寸表)
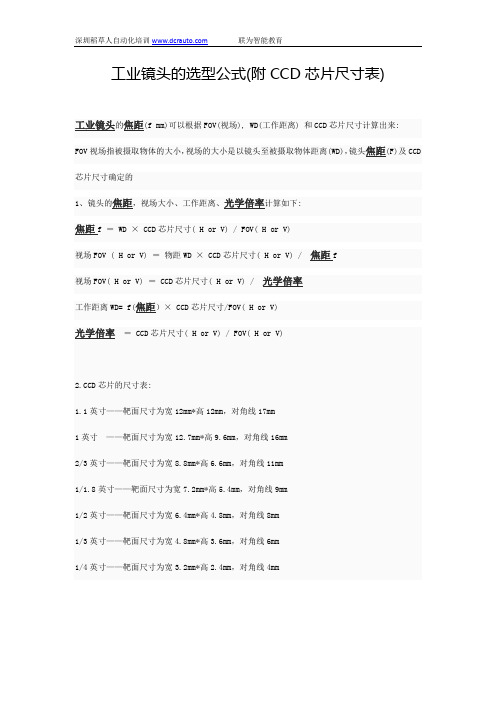
工业镜头的焦距(f mm)可以根据FOV(视场), WD(工作距离) 和CD芯片尺寸计算出来:
FOV视场指被摄取物体的大小,视场的大小是以镜头至被摄取物体距离(WD),镜头焦距(F)及CCD芯片尺寸确定的
1、镜头的焦距,视场大小、工作距离、光学倍率计算如下:
光学倍率= CCD芯片尺寸( H or V) / FOV( H or V)
D芯片的尺寸表:
1.1英寸——靶面尺寸为宽12mm*高12mm,对角线17mm
1英寸 ——靶面尺寸为宽12.7mm*高9.6mm,对角线16mm
2/3英寸——靶面尺寸为宽8.8mm*高6.6mm,对角线11mm
1/1.8英寸——靶面尺寸为宽7.2mm*高5.4mm,对角线9mm
1/2英寸——靶面尺寸为宽6.4mm*高4.8mm,对角线8mm
1/3英寸——靶面尺寸为宽4.8mm*高3.6mm,对角线6mm
1/4英寸——靶面尺寸为宽3.2mm*高2.4mm,对角线4mm
焦距f = WD × CCD芯片尺寸( H or V) / FOV( H or V)
视场FOV ( H or V) = 物距WD × CCD芯片尺寸( H or V) /焦距f
视场FOV( H or V) = CCD芯片尺寸( H or V) /光学倍率
工作距离WD= f(焦距)× CCD芯片尺寸/FOV( H or V)
工业相机的选型规则
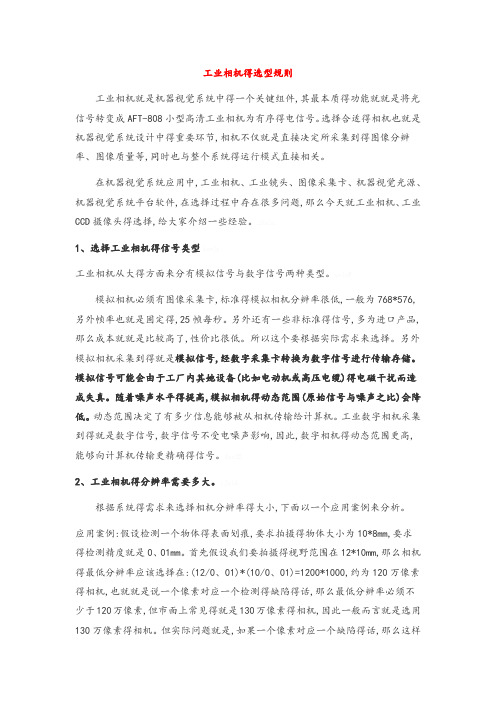
工业相机得选型规则工业相机就是机器视觉系统中得一个关键组件,其最本质得功能就就是将光信号转变成AFT-808小型高清工业相机为有序得电信号。
选择合适得相机也就是机器视觉系统设计中得重要环节,相机不仅就是直接决定所采集到得图像分辨率、图像质量等,同时也与整个系统得运行模式直接相关。
在机器视觉系统应用中,工业相机、工业镜头、图像采集卡、机器视觉光源、机器视觉系统平台软件,在选择过程中存在很多问题,那么今天就工业相机、工业CCD摄像头得选择,给大家介绍一些经验。
1、选择工业相机得信号类型工业相机从大得方面来分有模拟信号与数字信号两种类型。
模拟相机必须有图像采集卡,标准得模拟相机分辨率很低,一般为768*576,另外帧率也就是固定得,25帧每秒。
另外还有一些非标准得信号,多为进口产品,那么成本就就是比较高了,性价比很低。
所以这个要根据实际需求来选择。
另外模拟相机采集到得就是模拟信号,经数字采集卡转换为数字信号进行传输存储。
模拟信号可能会由于工厂内其她设备(比如电动机或高压电缆)得电磁干扰而造成失真。
随着噪声水平得提高,模拟相机得动态范围(原始信号与噪声之比)会降低。
动态范围决定了有多少信息能够被从相机传输给计算机。
工业数字相机采集到得就是数字信号,数字信号不受电噪声影响,因此,数字相机得动态范围更高,能够向计算机传输更精确得信号。
2、工业相机得分辨率需要多大。
根据系统得需求来选择相机分辨率得大小,下面以一个应用案例来分析。
应用案例:假设检测一个物体得表面划痕,要求拍摄得物体大小为10*8mm,要求得检测精度就是0、01mm。
首先假设我们要拍摄得视野范围在12*10mm,那么相机得最低分辨率应该选择在:(12/0、01)*(10/0、01)=1200*1000,约为120万像素得相机,也就就是说一个像素对应一个检测得缺陷得话,那么最低分辨率必须不少于120万像素,但市面上常见得就是130万像素得相机,因此一般而言就是选用130万像素得相机。
机器视觉选型计算概述

机器视觉选型计算概述机器视觉硬件选型计算概述V1.0⽬录1相机 (4)1.1相机光谱类型 (4)1.2相机像素值 (5)1.3图像帧速率和快门速度 (6)1.3.1断续送料的应⽤ (6)1.3.2连续送料的应⽤ (7)1.4图像数据传输 (7)1.4.1模拟传输⽅式 (8)1.4.2数字传输⽅式 (8)1.5其他要点 (9)1.5.1像素深度 (9)1.5.2传感器尺⼨ (9)1.5.3像元尺⼨ (10)1.5.4CCD&CMOS (10)2镜头 (10)2.1靶⾯尺⼨ (11)2.1.1⾯阵相机镜头 (11)2.1.2线阵相机镜头 (11)2.2焦距 (11)2.3镜头分辨率 (12)2.4接⼝类型 (13)2.5⼯作距离 (14)2.6镜头其他参数 (14)2.6.1景深 (14)2.6.2⼯作波长 (14)2.6.3畸变 (15)3光源 (16)3.1光源类型 (16)3.2光源照射⽅向性 (17)3.2.1反射类型 (17)3.2.2照射⾓度 (17)3.3光源光谱 (23)3.3.1光源颜⾊ (23)3.3.2光源波长特性 (24)3.3.3⼏种光源光谱使⽤情况汇总对⽐ (25)3.4光源亮度调整 (26)4其他 (27)4.1各种滤镜/选配件 (27)4.1.1偏光镜 (27)4.1.2锐波滤镜 (28)4.1.3保护镜 (28)机器视觉硬件选型计算概述V1.0本资料主要包括相机、镜头和光源的选型计算概述。
1相机相机选型主要参数包括:相机光谱类型、相机像素值、图像帧速率和快门速度、像素深度、传感器尺⼨、像元尺⼨。
1.1相机光谱类型相机光谱类型即相机⾊彩类型主要分为彩⾊相机和⿊⽩相机。
在处理图像时,彩⾊照相机使⽤的是⾊调(颜⾊)数据,⽽⿊⽩照相机使⽤的是强度(亮度)数据。
⾸先要强调⽬前市场上同等分辨率的彩⾊相机和⿊⽩相机价格差异不⼤,但是同等条件下仍然优选⿊⽩相机(特别是涉及尺⼨测量),主要原因如下:1、在图像边缘检测算法中⼀般实现先将彩⾊图⽚转换为⿊⽩图⽚然后根据像素之间像素值差异实现边缘检测。
大华球机命名规则

大华球机命名规则大华球机的命名规则通常由以下几部分组成:
1. 型号前缀
- SD: 标准系列
- PT: 网络系列
- IPC: 智能网络系列
2. 分辨率
- 2M: 200万像素
- 3M: 300万像素
- 5M: 500万像素
- 8M: 800万像素
3. 传感器型号
- LR: 日夜型
- LPC: LPR专用
- S5: 1/2.5英寸
- S8: 1/1.8英寸
4. 镜头类型
- Z: 变焦镜头
- F: 固定焦距镜头
5. 其他特征
- E: 增强型
- H: 防护罩
- I: 红外
- X: 扩展型
例如:
- IPC-HFW5831E-ZE: 智能网络800万像素日夜型变焦增强型球机
- SD59230U-HNI: 标准系列200万像素日夜型红外球机
- PT-IPC634E-ZR: 网络600万像素日夜型变焦球机
通过命名规则,可以快速了解球机的主要参数和特点,方便选型和管理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
镜头选型方法
一、确定检测范围
根据检测对象确定视场范围,如长度L和宽度W。
二、确定相机选型
1. 根据检测精度的要求,计算出所需的相机分辨率,即Sensor的像素数M*N,然后选择合适的 举例:检测100mm*100mm的范围,要求精度达到0.05mm,则所需像素至少要达到(100/0.05) 可以选用2590*2048或3072*2048的相机;
2. 确定相机选型后,得出Sensor成像面尺寸H*V,可通过相机参数查询,也可根据以下公式计
H=M*像元尺寸,V=N*像元尺寸 其中,像元尺寸可从sensor参数中查询
3. 确定相机选型后,计算成像系统的放大率β=目标成像尺寸/目标实际尺寸=Sensor尺寸/对应视场大小
举例:采用200W相机,Sensor水平尺寸H=9.216mm,对应检测长度L=100mm,则系统放大率 β=H/L=0.092
三、镜头选刑
1. 确定镜头像面规格及分辨率:
(1) 镜头成像面应不小于Sensor成像面尺寸,否则可能会出现黑边或暗角。
如搭配1/1.8"相机
(2) 镜头成像面不宜大于Sensor尺寸太多,否则可能会导致镜头清晰度不高或价格过高或外形
(3) 镜头分辨力一般不低于Sensor分辨率要求,如1/1.8" 600W相机搭配2/3" 2MP镜头时清晰度
2. 根据视场范围、Sensor尺寸和工作距离估算镜头焦距f:
若工作距离为D,则镜头焦距可按以下公式进行估算:f=β*D
举例:若系统成像放大率β=0.092,工作距离D=200mm,则镜头焦距约为f=0.092*200mm=19.4mm;此时选择1 则实际放大率β=f/D=0.08;若要保证原来0.092mm的放大率,可将工作距离调整为D=16/0.092=173m
合适的相机型号
0.05)*(100/0.05)=2000*2000,公式计算:
92*200mm=19.4mm;此时选择16mm镜头,作距离调整为D=16/0.092=173mm
清晰度可能较差;
nsor尺寸/对应视场大小
则系统放大率 β=H/L=0.092
"相机可选用1/1.8"或2/3"的镜头;或外形尺寸过大等问题;。