Fanuc系统中海德汉光栅尺参数设定
FANUC系统中绝对式光栅尺的设定方法

‐‐参数 1815#6,1815#0,1817#3,1868,2275#1,2394
2. 使用带参考标机的光栅尺、或带有绝对地址原点的光栅尺(全
闭环系统)时,将参数值设定为 1
#6
置 1,第一个光栅尺模块予以使用
#3
伺服电机参数:置 1 使用分离型位置
检测器
#0
分离型位置检测器的信号反转
位置脉冲数:电机编码器旋转一圈,
光栅尺所反馈的脉冲数
柔性进给齿轮(分子)
设置柔性齿轮比
柔性进给齿轮(分母)
位置脉冲变换系数
如果位置脉冲超过 32767,需设置脉冲转换系数
指令倍乘比 CMR
三、 光栅尺时伺服参数设定 1. 1815#1 设定为 1,开启全闭环; 2. 设定电机代码(已设置,无需更改) 3. AMR 设定,因为电机使用 AIS 电机,故设定为 000000000 4. 指令倍乘比设定为 2
Y轴位置反馈脉冲= 8mm 160000 0.00005mm
Z轴位置反馈脉冲= 10mm 200000 0.00005mm
因为此时脉冲数超过 32767,故需设置 2185 脉冲转换系数 10,No.2024 可设置为 16000,16000,20000
一、 设计参数
X 轴光栅尺
[FAGOR]SAF50-270-5-A Y 轴光栅尺 [FAGOR]SAF50-170-5-A Z 轴光栅尺 [FAGOR]SAF50-720-5-A
Hale Waihona Puke FANUC 系统中 FAGOR 光栅尺的参数设定方法 (绝对式光栅尺)
二、 相关参数说明
相关参数
参数功能
1005
#1 置 1 无挡块参考点设定有效
海德汉直线光栅尺产品说明书
用于NC数控机床10/20212更多信息,请访问海德汉官网• ,•也欢迎索取。
有关以下产品的样本:••敞开式直线光栅尺••内置轴承角度编码器••无内置轴承角度编码器••旋转编码器••海德汉后续电子电路••海德汉数控系统••机床检测和验收测试的测量装置技术信息:••海德汉编码器接口••进给轴精度••高安全性位置测量系统••EnDat•2.2-位置编码器双向数字接口••直驱编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
有关产品所遵循的标准(ISO,EN等)仅以样本中的标注为准。
目录4直线光栅尺用于NC数控机床用于数控机床的海德汉直线光栅尺几乎适用于任何应用。
也是进给轴为闭环控制的机器和设备的理想选择,例如铣床、加工中心、镗铣床、车床和磨床。
动态性能优异的直线光栅尺允许高速运动,沿测量方向的加速性能使其不仅能满足常规轴高动态性能要求,也能满足直驱电机对高动态性能的要求。
海德汉也提供其它应用所需的直线光栅尺,例如:••手动操作机床••冲压机和弯板机••自动化生产设备•直线光栅尺优点如果用直线光栅尺测量滑座位置,位置控制环就包括全部进给机构。
这就是全闭环控制模式。
进给轴的直线光栅尺检测机械运动误差并在控制系统电路中进行修正。
因此,能消除潜在的多个误差源:••滚珠丝杠发热导致的定位误差••反向误差••滚珠丝杠螺距误差导致的运动特性误差因此,直线光栅尺是高精度定位和高速加工机床不可或缺的基础技术手段。
机械结构用于数控机床的直线光栅尺为封闭式测量设备:铝制的尺壳保护尺带、读数头和导轨,避免切屑、灰尘和切削液进入。
自动向下压的弹性密封条保持外壳密封。
读数头沿光栅尺带上摩擦力极小的导轨运动。
联接件将读数头与安装架连接在一起并补偿光栅尺与机床滑座间的不对正误差。
光栅尺与安装块间允许±•0.2•mm至•±•0.3•mm的横向和轴向误差,具体•数值与光栅尺型号有关。
FANUC-关闭光栅尺参数及步骤说明

2. Changing of the Signal Period of the LC 100 from 16 µm to 20 µm2.1 TNCAbsolute encoders can be used starting with the TNC 426 M. The signal period is set in the parameters MP331.x and MP332.x.ExampleMP 331.x in [mm] MP 332.x in [mm]LC 181 0.016 1LC 182 0.02 12.2 SIEMENSFor the SIEMENS 840 D the parameters 31 010:= ENC_GRID_POINT_DIST and30 260:= ABS_INC_RATIO are responsible for the configuration.Example31 010(ENC_GRID_POINT_DIST)30 260(ABS_INC_RATIO)LC 181 0.016 mm 160LC 182 0.020 mm2002.3 INDRAMATThe INDRAMAT control mostly uses the data from the encoders (Word 15 and Word 16) in order to configure the control. This means that parameterization is not necessary.2.4 Service Concept for the LC 181If a linear encoder is exchanged in the field by the OEM or by the JH Service department, then the machine datum of the affected axis must remain exactly the same. Because of the mechanical mounting tolerance and the tolerance for the position of the glass scale within the linear encoder housing, this always means that the machine parameters must be changed. On the TNC these parameters are protected by a code number, and can only be changed by trained personnel.As described in IIV 22/2004, the LC 182 is the replacement encoder for the LC 181. Due to the changes to the signal period, in case of servicing, the machine parameters for the machine datum and for the signal period must be adapted. Cautionary notes will be added to page 5 of the mounting instructions for the LC 182. This chapter will be titled “LC 182 as replacement encoder for LC 181,” and will detail the electrical and mechanical differences between the two devices.(See 4.1)3. Adaptation of the Measuring Step for Purely Serial Interfaces3.1 LC 400 and LC 100 at the Position Input (SDU) of FANUC Controls(These data were given to JH by FANUC in English. They were not translated into German in order to prevent incorrect interpretation due to company-specific terminology.)Example 1: Ball-screw pitch: 5mm; Motor coupled directly (1:1)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm] Power-Mate i0.1 0.05 0.01RemarksPLC02000#0 1804#0 0 0 0Linear Motor2010#2 1954#2Linear motor is not used.Number of Velocity Pulses2023 1876 8192 8192 8192 Number of Position Pulses2024 1891 25000 25000 31250L / R*1 Position feedback Pulse conversion coefficient 2185 2628 2 4 16 *1 FFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / DÖ Detection unit: -- -- 0.1 0.05 0.01 [µm] CMRSetting value1820 1820(1) 2(2) 4(10) 20Note:Setting value = CMR * 2CMR ≥ 21802 #7 0 1 1 If CMR ≥2 set to 1 Reference Counter (N) 1821 1896 50000 100000 500000 Reference Counter (M)21792622from 90B0 s/wExample 2: Ball-screw pitch: 10mm; Motor coupled by gear 1:3 (motor 3rev : screw 1 rev)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm] Power-Mate i0.1 0.05 0.01RemarksPLC02000#0 1804#0 0 0 0Linear Motor2010#2 1954#2Linear motor is not used.Number of Velocity Pulses2023 1876 8192 8192 8192 Number of Position Pulses2024 1891 16667 16667 20833L / R*1 Position feedback Pulse conversion coefficient 2185 2628 2 4 16 *1 FFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / DÖ Detection unit: -- -- 0.1 0.05 0.01 [µm] CMRSetting value1820 1820(1) 2(2) 4(10) 20Note:Setting value = CMR * 2CMR ≥ 21802 #7 0 1 1 If CMR ≥2 set to 1 Reference Counter (N) 1821 1896 100000 200000 10000003.2 LC 400 and LC 100 at Speed Input (Linear Motor) of FANUC ControlsExample 1:Linear Motor L300A (30mm magnet pitch)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm]Power-Mate i 0.1 0.05 0.01Remarks PLC0 2000#0 1804#0 0 0 0 Only before 90B0 s/w Linear Motor 2010#2 1954#2 1 1 1 Linear motor is used.Number of VelocityPulses 2023 1876 1953 3906 19531 5000 x 20 / (512 x R) Number of PositionPulses 2024 1891 6250 12500 31250 16000 x 20 / (512 x R) Position feedback Pulseconversion coefficient 2185 2628 0 0 2AMR conversioncoefficient 2112 1705 300 600 3000 MP / RFFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / D Ö Detection unit: -- 0.10.050.01[µm]CMRSetting value 1820 (1)2(2)4(10)20Note:Setting value = CMR * 2CMR ≥ 2 1802 #7 0 1 1IfCMR≥2 set to 1 Reference Counter 1821 1896 10000 20000 100000(Arbitraryvalue) Example 2:Linear Motor L1500B (60mm magnet pitch)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm]Power-Mate i 0.1 0.05 0.01Remarks PLC0 2000#0 1804#0 0 0 0 Only before 90B0 s/w Linear Motor 2010#2 1954#2 1 1 1 Linear motor is used.Number of VelocityPulses 2023 1876 1953 3906 19531 5000 x 20 / (512 x R) Number of PositionPulses 2024 1891 6250 12500 31250 16000 x 20 / (512 x R) Position feedback Pulseconversion coefficient 2185 2628 0 0 2AMR conversioncoefficient 2112 1705 600 1200 6000 MP / RFFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / D Ö Detection unit: -- 0.10.050.01[µm]CMRSetting value 1820 (1)2(2)4(10)20Note:Setting value = CMR * 2CMR ≥ 2 1802 #7 0 1 1IfCMR≥2 set to 1 Reference Counter 1821 1896 10000 20000 100000(Arbitraryvalue)3.3 Mitsubishi ControlsIn the Mitsubishi protocol the measuring step is mostly described via additional information in the serial data word (identifier). Therefore no changes must be made to the machine parameters. The 10 nm resolution can be processed by the new generation of controls (MDS-D and MDS-DH) starting in mid-2004.4 Enclosure4.1 Excerpt from Page 5 of the Mounting Instructions for the LC 182 For the LC 192 only the changes to the mechanics are shown, since all measuring steps will continue to be available from the Service department.ØØ。
发那科距离码光栅尺的调试
发那科距离码光栅尺的调试随着科学技术的发展,各种智能型的检测儿件也不断地涌现,德国海德汉(E}IDENHAIN)公司最新推出了一种具带距离编码参考点标志的直线光栅尺(distanc}coded reference),使用带距离编码参考点标志的线性测量系统,可以不必为返回参考点而在机床安装减速开关,并返回一个固定的机床参考点,这样在实际使用中可以带来了许多方便。
下面是在FANUC数控系统中使用的一些经验。
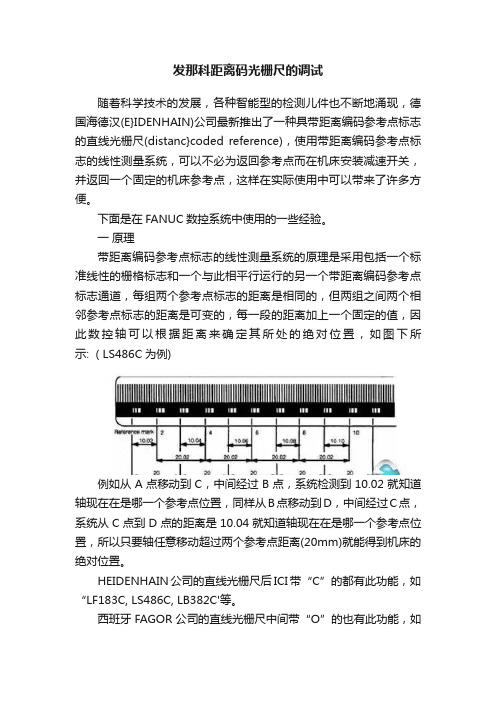
一原理带距离编码参考点标志的线性测量系统的原理是采用包括一个标准线性的栅格标志和一个与此相平行运行的另一个带距离编码参考点标志通道,每组两个参考点标志的距离是相同的,但两组之间两个相邻参考点标志的距离是可变的,每一段的距离加上一个固定的值,因此数控轴可以根据距离来确定其所处的绝对位置,如图下所示: ( LS486C为例)例如从A点移动到C,中间经过B点,系统检测到10.02就知道轴现在在是哪一个参考点位置,同样从B点移动到D,中间经过C点,系统从C点到D点的距离是10.04就知道轴现在在是哪一个参考点位置,所以只要轴任意移动超过两个参考点距离(20mm)就能得到机床的绝对位置。
HEIDENHAIN公司的直线光栅尺后ICI带“C”的都有此功能,如“LF183C, LS486C, LB382C'等。
西班牙FAGOR公司的直线光栅尺中间带“O”的也有此功能,如“COV, COVP, FOP'等。
二应用在FANUC数控系统OI-C中应用。
1.参数设定(此功能为选项功能Oic订货号A02B-0310-J670 18I 订货号A02B-0284-J670)1).1815#1 OPT 1815#2 DCL光栅尺使用类型:选择了带距离编码参考点标志的直线光栅尺。
(在使用圆光栅时1815#1 #2 #3均要设定为1)2).1802#1 DC43) .1821相邻两个Markl之间的距离直线光栅尺标准参考点标志栅格间距4)1882 相邻两个Mark2之间的距离5)1883 假想的光栅尺原点与参考点之间的距离以海德汉LB302C光栅尺为例的参数设置相邻两个Markl之间的距离 80mm相邻两个Mark2之间的距离80.040mm想应参数设置如下:1815#1 1 1815#2 11802#1 DCL设置为0使用3参考点检测回零点1821 80000(最小检测单位u)1882 80040(最小检测单位u)1883上电后回零机床会移动3次自动计算零点的坐标位置。
海德汉光栅尺调试
海德汉光栅尺调试光栅尺调试增加第二测量回路及增加光栅尺功能1.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 第二测量回路生效。
机床数据MD30200=2 2.N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=1 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1 N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500 如果为带距离编码的光栅尺:3.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 第二测量回路生效。
4.机床数据MD30200=2 N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=1 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1 MD34200 ENC_REFP_MODE=3 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.04 ;光栅尺分辩率MD34310 ENC_MARKER_INC =0.04 ;两个零脉冲之间的差值MD 34300 ENC_REFP_DIST=80 :两个零脉冲之间的距离N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=80 ;找参考点的最大距离MD34320 ENC_INVERS[1] ;=0 光栅尺与机床同方向=1 光栅尺与机床反方向MD34000 REFP_CAM_IS_ACTIVE =0 绝对光栅尺:5.机床数据MD30200=2 N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=4 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 型号来定N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110$MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500 MD34200 ENC_REFP_MODE=0 MD34102 REF_SYNC-ENC=1 MD1030=18H 标定的步骤:和802D 一样如果是光栅回零的话,请参考以下以下方法:如果你的光栅尺是带距离编码参考点标志的光栅尺的话(一般海德汉光栅尺后面带C 标志的都有此功能),回参考点就不需要回零开关,参数设定如下:1、34200=3 光栅尺使用类型2、34300[1]=20mm 直线光栅尺标准参考点标志栅格间距(LS486C 为20mm)3、34060[1]=40 返回参考点最大移动距离=2 倍直线光栅尺标准参考点标志栅格间距4、34000=0 不使用进给轴返回参考点凸轮,即不用返回参考点减速开关信号(DB31.DBX12.7)5、34090=XXX 返回参考点偏移值6、34310[1]=0.020 光栅尺信号节距(LS486C 为0.020mm)希望对你有参考价值!。
海德汉系统数控机床调试资料
机床安装调试1、机床的机、电装完工后,在通电前需进行安全检查。
上强电前将所有自动保护开关断开,检查所有管线的连接情况。
如果油管没有接好要将润滑,液压电机等断开。
将NC系统的电源断开(24VDC):拔下在NC板上的三个插头(24VDC)、显示面板上的一个插头(24VDC)。
以免因电压不正常损坏主板和电子器件。
2、机床总电源上电后的电压检查。
总电源通电后,首先,分别检查三相电源电压是否是正常值,有无缺相;然后,逐级检查空开的电压(分断、合闸)是否正常;检查24VDC电源是否正常,断路器合闸前后的电压电否正常。
以上项目检查完成后,断开机床总电源。
断开所有交流回路的断路器(空开),在断电的状态下插好NC系统的四个电源插头。
准备机床和系统的通电工作。
3、机床和系统的通电电源检查完成后,可以进行机床和系统的通电。
NC系统上电后TNC I530进行数据更新和安装机床备份数据,数据通讯接口用Ethernet,进入TCP/IP设置界面设置IP地址:192.168.71.222,子网:255.255.255.0,进入NET设置的密码为:NET123。
升级后的新版本为:340 490-003,升级后要删除旧的文件。
传输软件为HDH的TNCremo.4、机床系统数据传输系统更新后,传输机床控制所需的文件和数据。
在TNC 530硬盘下有\NC、\PLC等子目录,根据文件属性将数据文件传输到相应的目录。
数据文件主要有,报警文件—Language;铣头补偿控制文件—KINEMAT(RTCP);公司商标文件—Logo;PLC程序文件—960320011M.SRC;机床参数MP文件—MPLIST.SYS,MPNAME.MP;M功能定义文件—MGROUPS.SYS;数据设置信息文件—OEM.SYS(该文件要根据数据文件的安装路径、名称进行更改设置);。
待整理5、机床参数MP定义PLC功能的NC参数:控制中用到的状态字。
MP4310.0 (W976)MP4310.1 (W978)MP4310.2 (W980)MP4310.3 (W982)MP4310.4 (W984)MP4310.5 (W986)MP4310.6 (W988)定义语言参数:MP7230.0;0—ENGLISH;温度控制参数:MP4210.8;700改为0用于调试时用。
海德汉参数设置

海德汉系统参数设置注:海德汉系统中各轴参数号码一致,搜索时只需在参数号码前加上前缀PX、PY、PZ、PS_1就可,所以本资料基本以X轴为例进行介绍,其他各轴以此类推。
本资料重点介绍参数设置,具体的操作步骤略。
1、进入不同页面密码:参数设置:95148网络设置:NET123PLC设置:807667系统识别:SIK2、显示设置A:主轴显示(静止时也显示角度)System>DisplaySettings>CfgDisplayData>spindleDislay(100007)>during closed loop and m5B:语言显示System>DisplaySettings>CfgDisplaylanguage>nclanguage(101301)>chinese>plcdialoglanguage(101302)>chinese>plcerrorlanguage(101303)>chinese>helplanguage(101304)>chinese3、机床模式System>CfgMachineSimul>simMode(100201)> FullOperation4、屏蔽轴在调试、维护机床时,如果某轴的电机未连接,这时需要将此轴屏蔽,以免误动作。
System>axes>physicalaxis>cfgaxis>axismode(x.300105)>notactive>Testmode(x.300106)>false(任意一个都可以)5、驱动及电机选型Axes>parametersets>px>cfgpowerstage(px.401201)>ampname>heidenhain-uec111(根据具体的驱动型号配置)>cfgservomotor(px.401301)>qsy130e-ecodyn(根据具体的电机型号配置)6、回参考点设置Axes>parametersets>px>cfgreferencing>refType(px.400401):是返回参考点的方式,直线进给轴选用Switch,changing Dir,即遇到回零挡块后反向寻找参考点;主轴选用without switch + on the fly>refPosition(零偏)(px.400403):参考点在机床坐标系中的位置;>refSwitchActive:参考点挡块生效时的电平值;>refFeedHigh:返回参考点挡块的速度;>refFeedLow:反向时寻找参考点时的速度;>refDirection:返回参考点挡块的方向。
海德汉编码器和海德汉光栅尺使用的各种参数
海德汉编码器和海德汉光栅尺使用的各种参数海德汉海德汉编码器和海德汉光栅尺使用的各种参数10编程:Q参数10.1原理和概述你可以在一个零部件加工程序中编写同类零部件的程序,你只须输入称作Q参数的变量取代固定的数字值即可。
Q参数可以代表诸如以下的信息:□坐标值□进给率□RPM(重复数/分)□循环数据Q参数也可以帮助你编写通过数学功能定义的外形轮廓。
同时,你也可以使用Q参数根据逻辑状况执行机械加工步骤。
与FK编程连用,可以将无法NC-兼容的外形轮廓与Q参数结合。
Q参数由字母Q和0到299之间的一个数字命名。
其分组情况分为三类:含义范围普遍适用参数,适用于所有TNC内存记忆的程序Q0到Q99为特殊TNC功能设定的参数Q100到Q199主要用于循环的参数,适用于所有存储在TNC内存中的程序Q200到Q399编程说明在一个程序中可以混用Q参数和固定数字值。
Q参数可以被指定给-99.999,9999和+99 999.9999之间的数字值。
TNC可以计算十进制小数点前57位到小数点后7位的范围(32位数据的计算范围相当于十进制数值4 294 967 296)。
一些Q参数总是被TNC指定给同样的数据。
例如,Q108总是被指定给当前刀具半径,可参见368页的“预先指定Q参数”。
如果你在OEM循环中使用Q60至Q99之间的参数,须通过MP7251定义这些参数是否仅用于OEM循环,还是全部适用。
338调用Q参数功能在编写零部件加工程序时,按下“Q”键(位于数字值输入键盘,-/+键的下方)。
然后,TNC会显示以下软键盘:功能组软键盘基础算术(指定,加减乘除,平方根) BASICARITHM.三角函数功能TRIGO-NOME TRY计算循环功能CIRCLECALCU-LATION如果/则条件,转移JUMP其它功能DIVERSEFUNCTION直接输入公式FORMULA33910.2 同类零件-Q参数代替数字值Q参数功能FN0:ASSIGN指定数字值给Q参数。
海德汉系统机床调试q_xk
*负向软限位
MP920.x; MP921.0; MP922.x 设定为相同值。
*零偏
MP960.x
*速度加速度设定
MP1010.x; 快速移动速度 G00
MP1020.x; 手动进给速度
MP1054.x; 电机每转对应的直线距离 即传动比 X 螺距。
MP1060.x; 轴加速度。
*伺服调整
电流环:
4
*驱动及电机选型
MP2100.x 驱动配置
MP2200.x 电机选型
扩展键
选择坐标轴
存到相应轴中。
MP2180.x; PWM 频率设置 (.12 为主轴) MP2190: 母线电压 600V
HEIDENHAIN inverter regenerative: 650 V HEIDENHAIN inverter non-regenerative: 565 V *主轴设置 MP3010: 主轴类型。6;有外装编码器的。 MP3120: 是否允许主轴转速为零。 MP3130: M3, M4 方向设定 MP3140: 编码器计数方向 MP3142: 主轴编码器线数 MP3210.x: 1~8 档电机转数。 MP3240.1: 电机最小转数 MP3240.2: 主轴晃车速度 MP3310.0: 主轴倍率最大值 MP3310.1: 主轴倍率最小值 MP3411: 加速度 MP3430: 主轴定向(零偏) MP3510.x: 主轴 1~8 档转速 *显示参数 MP7290:显示分辨率 MP7291:显示轴顺序 MP7230.0~3: 显示语言 MP7235:时区设置
*各轴有效
MP10: %0000 0000 0000 1111 (从第 0 位是第 1 轴;坐标轴,主轴不在此参数中。)
海德汉直线光栅尺产品说明书

敞开式直线光栅尺06/2021敞开式直线光栅尺直线光栅尺测量直线轴位置,无需任何其它机械传动件。
有效避免多个潜在误差源的影响:••滚珠丝杠发热导致的定位误差••反向误差••滚珠丝杠螺距误差导致的运动特性误差因此,直线光栅尺是高精度定位和高速加工机床不可或缺的基础技术手段。
敞开式直线光栅尺广泛用于需要极高测量精度的机器设备。
典型应用包括:••半导体工业的测量和生产设备••PCB电路板组装机••超精密机床和设备,例如加工光学器件的金刚石刀具,加工磁盘的端面车床和加工铁氧体元件的磨床••高精度机床••测量机和比较仪、测量显微镜和其它•精密测量设备••直驱电机的位置和速度测量机械结构敞开式直线光栅尺包括光栅尺或钢尺带和读数头,光栅尺和读数头间无机械接触。
敞开式直线光栅尺的尺带固定在安装面上。
因此,为确保直线光栅尺的高精度,必须确保安装面平面度达到高标准。
我们还提供以下产品的详细信息,欢迎•向我们索取或访问海德汉官网•:••内置轴承角度编码器••光学扫描的模块型角度编码器••磁电扫描的模块型角度编码器••旋转编码器••伺服驱动编码器••直线光栅尺用于NC数控机床••接口电子电路••海德汉数控系统本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
有关产品所遵循的标准(ISO,EN等)仅以样本中的标注为准。
目录选型指南绝对式编码器绝对式位置测量LIC敞开式直线光栅尺为绝对式位置测量的光栅尺,最大测量范围达28•m并允许•高速运动。
•用在真空环境中的光栅尺海德汉的标准光栅尺适用于一般或中等真空应用。
如果用于高真空和超高真空环境中,光栅尺必须满足特殊要求。
在选择光栅尺的结构设计和材质中,必须特别满足这些条件的要求。
更多信息,请参见真空应用的直线光栅尺“技术信息”资料。
LIC•4113•V和LIC•4193•V直线光栅尺特别适用于高真空度应用。
更多信息,请参见相应的“产品信息”资料。
海德汉系统机床调试q_xk
MP 1700 .. 1899 Operation with following error (lag)
MP 2000 .. 2999 Parameters for the PWM interface (DSP)
MP 3000 .. 3999 Spindle control (1st spindle)
*各轴电机编码器插在 MC422 接口号
MP112.0: 15; (X axis encoder interface for speed loop) X15
MP112.1: 16; (Y axis encoder interface for speed loop) X16
MP112.2: 17; (Z axis encoder interface for speed loop) X17
7. 进入不同功能页面密码: ; Edit machine parameters ............................ 95148 ; Edit/Test PLC program ............................... 807667 ; Offset compensation ................................. 75368 ; Unprotect PGM ....................................... 86357 ; Digital scope 4 channels ............................ 688379 ; Erase RAM, total (M0..M999, B0..B127) ............... 531210 ; Write system data FN17,31,32......................... 555343 ; Reset PLC counter ................................... 857282 ; Monitor network ..................................... NETMONI
Fanuc系统中海德汉光栅尺参数设定

约翰内斯·海德汉博士(中国)有限公司DR.JOHANNES HEIDENHAIN (CHINA) CO., LTD北京市顺义区天竺空港工业区A 区天纬三街六号 邮编:101312Fanuc 系统中海德汉光栅尺参数设定1. 光栅尺相关参数约翰内斯·海德汉博士(中国)有限公司DR.JOHANNES HEIDENHAIN (CHINA) CO., LTD北京市顺义区天竺空港工业区A 区天纬三街六号 邮编:1013122. Example 1: 系统指令单位1µm,丝杠螺距为10mm ,减速比1/2, 光栅尺型号为LS177,TTLx5,标准栅距为20µm,5倍细分后信号周期为4µm,光栅尺只有一个参考点。
● CMR=指令单位(1µm)/检测单位(1µm)=1,P1820=2xCMR=2指令单位:CNC 发出一个指令脉冲时,机床所移动的距离。
检测单位:光栅尺可以检测机械位置的最小单位。
● 假设需要移动10mm ,系统需发送10mm/0.001=10 000 Pulse机床移动10mm ,光栅尺反馈10mm/0.004=2500 Pulse N/M=10 000/2500=4/1 P2084=4 ;P2085=1. ● 速度反馈脉冲数P2023=8192● 电机一转机床移动5mm ,由光栅尺反馈的脉冲数位5mm/0.004(光栅尺信号周期)=1250 Pulse P2024=1250● 参考计数器容量P1821为5000,6000.7000中的任意值. 3. Example 2:若还是同一坐标轴,换成LS177C ,TTLx5● 其他参数同上,只有参考点参数设定不同 ● P1821=20 000 ● P1882=20 0204. Example 3:同一坐标轴,光栅尺换成LB382C ,信号周期40µm。
● CMR=2● 假设需要移动10mm ,系统需发送10mm/0.001=10 000 Pulse机床移动10mm ,光栅尺反馈10mm/0.04=250 Pulse N/M=10 000/250=40/1 P2084=40 ;P2085=1.● 电机一转机床移动5mm ,由光栅尺反馈的脉冲数位5mm/0.04(光栅尺信号周期)=125 Pulse P2024=125 ● P1821=80 000 ● P1882=80 040。
FANUC-关闭光栅尺参数及步骤说明
2. Changing of the Signal Period of the LC 100 from 16 µm to 20 µm2.1 TNCAbsolute encoders can be used starting with the TNC 426 M. The signal period is set in the parameters MP331.x and MP332.x.ExampleMP 331.x in [mm] MP 332.x in [mm]LC 181 0.016 1LC 182 0.02 12.2 SIEMENSFor the SIEMENS 840 D the parameters 31 010:= ENC_GRID_POINT_DIST and30 260:= ABS_INC_RATIO are responsible for the configuration.Example31 010(ENC_GRID_POINT_DIST)30 260(ABS_INC_RATIO)LC 181 0.016 mm 160LC 182 0.020 mm2002.3 INDRAMATThe INDRAMAT control mostly uses the data from the encoders (Word 15 and Word 16) in order to configure the control. This means that parameterization is not necessary.2.4 Service Concept for the LC 181If a linear encoder is exchanged in the field by the OEM or by the JH Service department, then the machine datum of the affected axis must remain exactly the same. Because of the mechanical mounting tolerance and the tolerance for the position of the glass scale within the linear encoder housing, this always means that the machine parameters must be changed. On the TNC these parameters are protected by a code number, and can only be changed by trained personnel.As described in IIV 22/2004, the LC 182 is the replacement encoder for the LC 181. Due to the changes to the signal period, in case of servicing, the machine parameters for the machine datum and for the signal period must be adapted. Cautionary notes will be added to page 5 of the mounting instructions for the LC 182. This chapter will be titled “LC 182 as replacement encoder for LC 181,” and will detail the electrical and mechanical differences between the two devices.(See 4.1)3. Adaptation of the Measuring Step for Purely Serial Interfaces3.1 LC 400 and LC 100 at the Position Input (SDU) of FANUC Controls(These data were given to JH by FANUC in English. They were not translated into German in order to prevent incorrect interpretation due to company-specific terminology.)Example 1: Ball-screw pitch: 5mm; Motor coupled directly (1:1)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm] Power-Mate i0.1 0.05 0.01RemarksPLC02000#0 1804#0 0 0 0Linear Motor2010#2 1954#2Linear motor is not used.Number of Velocity Pulses2023 1876 8192 8192 8192 Number of Position Pulses2024 1891 25000 25000 31250L / R*1 Position feedback Pulse conversion coefficient 2185 2628 2 4 16 *1 FFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / DÖ Detection unit: -- -- 0.1 0.05 0.01 [µm] CMRSetting value1820 1820(1) 2(2) 4(10) 20Note:Setting value = CMR * 2CMR ≥ 21802 #7 0 1 1 If CMR ≥2 set to 1 Reference Counter (N) 1821 1896 50000 100000 500000 Reference Counter (M)21792622from 90B0 s/wExample 2: Ball-screw pitch: 10mm; Motor coupled by gear 1:3 (motor 3rev : screw 1 rev)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm] Power-Mate i0.1 0.05 0.01RemarksPLC02000#0 1804#0 0 0 0Linear Motor2010#2 1954#2Linear motor is not used.Number of Velocity Pulses2023 1876 8192 8192 8192 Number of Position Pulses2024 1891 16667 16667 20833L / R*1 Position feedback Pulse conversion coefficient 2185 2628 2 4 16 *1 FFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / DÖ Detection unit: -- -- 0.1 0.05 0.01 [µm] CMRSetting value1820 1820(1) 2(2) 4(10) 20Note:Setting value = CMR * 2CMR ≥ 21802 #7 0 1 1 If CMR ≥2 set to 1 Reference Counter (N) 1821 1896 100000 200000 10000003.2 LC 400 and LC 100 at Speed Input (Linear Motor) of FANUC ControlsExample 1:Linear Motor L300A (30mm magnet pitch)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm]Power-Mate i 0.1 0.05 0.01Remarks PLC0 2000#0 1804#0 0 0 0 Only before 90B0 s/w Linear Motor 2010#2 1954#2 1 1 1 Linear motor is used.Number of VelocityPulses 2023 1876 1953 3906 19531 5000 x 20 / (512 x R) Number of PositionPulses 2024 1891 6250 12500 31250 16000 x 20 / (512 x R) Position feedback Pulseconversion coefficient 2185 2628 0 0 2AMR conversioncoefficient 2112 1705 300 600 3000 MP / RFFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / D Ö Detection unit: -- 0.10.050.01[µm]CMRSetting value 1820 (1)2(2)4(10)20Note:Setting value = CMR * 2CMR ≥ 2 1802 #7 0 1 1IfCMR≥2 set to 1 Reference Counter 1821 1896 10000 20000 100000(Arbitraryvalue) Example 2:Linear Motor L1500B (60mm magnet pitch)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm]Power-Mate i 0.1 0.05 0.01Remarks PLC0 2000#0 1804#0 0 0 0 Only before 90B0 s/w Linear Motor 2010#2 1954#2 1 1 1 Linear motor is used.Number of VelocityPulses 2023 1876 1953 3906 19531 5000 x 20 / (512 x R) Number of PositionPulses 2024 1891 6250 12500 31250 16000 x 20 / (512 x R) Position feedback Pulseconversion coefficient 2185 2628 0 0 2AMR conversioncoefficient 2112 1705 600 1200 6000 MP / RFFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / D Ö Detection unit: -- 0.10.050.01[µm]CMRSetting value 1820 (1)2(2)4(10)20Note:Setting value = CMR * 2CMR ≥ 2 1802 #7 0 1 1IfCMR≥2 set to 1 Reference Counter 1821 1896 10000 20000 100000(Arbitraryvalue)3.3 Mitsubishi ControlsIn the Mitsubishi protocol the measuring step is mostly described via additional information in the serial data word (identifier). Therefore no changes must be made to the machine parameters. The 10 nm resolution can be processed by the new generation of controls (MDS-D and MDS-DH) starting in mid-2004.4 Enclosure4.1 Excerpt from Page 5 of the Mounting Instructions for the LC 182 For the LC 192 only the changes to the mechanics are shown, since all measuring steps will continue to be available from the Service department.ØØ。
海德汉光栅尺调试

光栅尺调试增加第二测量回路及增加光栅尺功能1.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 第二测量回路生效。
机床数据MD30200=2 2.N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=1 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1 N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500 如果为带距离编码的光栅尺:3.PLC 程序修改DB3x.DB1.5=0, DB3x.DB1.6=1 第二测量回路生效。
4.机床数据MD30200=2 N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=1 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1 MD34200 ENC_REFP_MODE=3 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.04 ;光栅尺分辩率MD34310 ENC_MARKER_INC =0.04 ;两个零脉冲之间的差值MD 34300 ENC_REFP_DIST=80 :两个零脉冲之间的距离N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=80 ;找参考点的最大距离MD34320 ENC_INVERS[1] ;=0 光栅尺与机床同方向=1 光栅尺与机床反方向MD34000 REFP_CAM_IS_ACTIVE =0 绝对光栅尺:5.机床数据MD30200=2 N30200 $MA_NUM_ENCS[AX1]=2 N30240 $MA_ENC_TYPE[1,AX1]=4 N31000 $MA_ENC_IS_LINEAR[1,AX1]=1 N31010 $MA_ENC_GRID_POINT_DIST[1,AX1]=0.02 型号来定N31040 $MA_ENC_IS_DIRECT[1,AX1]=1 N32110 $MA_ENC_FEEDBACK_POL[1,AX1]=-1N34060 $MA_REFP_MAX_MARKER_DIST[1,AX1]=500 MD34200 ENC_REFP_MODE=0 MD34102 REF_SYNC-ENC=1 MD1030=18H 标定的步骤:和802D 一样如果是光栅回零的话,请参考以下以下方法:如果你的光栅尺是带距离编码参考点标志的光栅尺的话(一般海德汉光栅尺后面带C 标志的都有此功能),回参考点就不需要回零开关,参数设定如下:1、34200=3 光栅尺使用类型2、34300[1]=20mm 直线光栅尺标准参考点标志栅格间距(LS486C 为20mm)3、34060[1]=40 返回参考点最大移动距离=2 倍直线光栅尺标准参考点标志栅格间距4、34000=0 不使用进给轴返回参考点凸轮,即不用返回参考点减速开关信号(DB31.DBX12.7)5、34090=XXX 返回参考点偏移值6、34310[1]=0.020 光栅尺信号节距(LS486C 为0.020mm)希望对你有参考价值!。
fanuc加距离码光栅尺
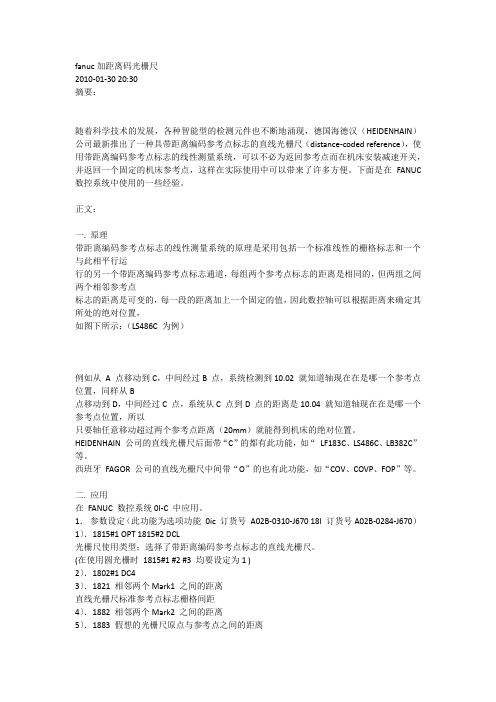
fanuc加距离码光栅尺2010-01-30 20:30摘要:随着科学技术的发展,各种智能型的检测元件也不断地涌现,德国海德汉(HEIDENHAIN)公司最新推出了一种具带距离编码参考点标志的直线光栅尺(distance-coded reference),使用带距离编码参考点标志的线性测量系统,可以不必为返回参考点而在机床安装减速开关,并返回一个固定的机床参考点,这样在实际使用中可以带来了许多方便。
下面是在FANUC 数控系统中使用的一些经验。
正文:一. 原理带距离编码参考点标志的线性测量系统的原理是采用包括一个标准线性的栅格标志和一个与此相平行运行的另一个带距离编码参考点标志通道,每组两个参考点标志的距离是相同的,但两组之间两个相邻参考点标志的距离是可变的,每一段的距离加上一个固定的值,因此数控轴可以根据距离来确定其所处的绝对位置,如图下所示:(LS486C 为例)例如从A 点移动到C,中间经过B 点,系统检测到10.02 就知道轴现在在是哪一个参考点位置,同样从B点移动到D,中间经过C 点,系统从C 点到D 点的距离是10.04 就知道轴现在在是哪一个参考点位置,所以只要轴任意移动超过两个参考点距离(20mm)就能得到机床的绝对位置。
HEIDENHAIN 公司的直线光栅尺后面带“C”的都有此功能,如“LF183C、LS486C、LB382C”等。
西班牙FAGOR 公司的直线光栅尺中间带“O”的也有此功能,如“COV、COVP、FOP”等。
二. 应用在FANUC 数控系统0I-C 中应用。
1.参数设定(此功能为选项功能0ic 订货号A02B-0310-J670 18I 订货号A02B-0284-J670)1〕.1815#1 OPT 1815#2 DCL光栅尺使用类型:选择了带距离编码参考点标志的直线光栅尺。
(在使用圆光栅时1815#1 #2 #3 均要设定为1 )2〕.1802#1 DC43〕.1821 相邻两个Mark1 之间的距离直线光栅尺标准参考点标志栅格间距4〕.1882 相邻两个Mark2 之间的距离5〕.1883 假想的光栅尺原点与参考点之间的距离以海德汉LB302C 光栅尺为例的参数设置相邻两个Mark1 之间的距离80mm相邻两个Mark2 之间的距离80.040mm相应参数设置如下:1815#1 1 1815#2 11802#1 DCL 设置为0 使用3 参考点检测回零点1821 80000 (最小检测单位u)1882 80040 (最小检测单位u)1883 上电后回零机床会移动3 次自动计算零点的坐标位置。
FANUC 带有距离编码的光栅尺的调试
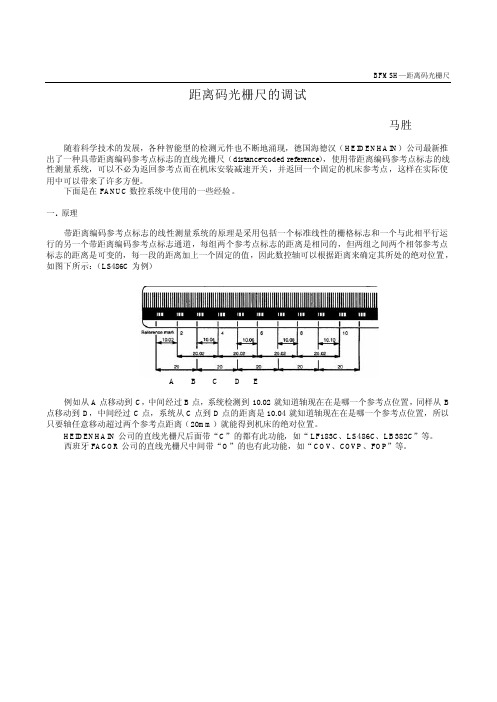
BFMSH—距离码光栅尺距离码光栅尺的调试马胜随着科学技术的发展,各种智能型的检测元件也不断地涌现,德国海德汉(HEIDENHAIN)公司最新推出了一种具带距离编码参考点标志的直线光栅尺(distance-coded reference),使用带距离编码参考点标志的线性测量系统,可以不必为返回参考点而在机床安装减速开关,并返回一个固定的机床参考点,这样在实际使用中可以带来了许多方便。
下面是在FANUC数控系统中使用的一些经验。
一. 原理带距离编码参考点标志的线性测量系统的原理是采用包括一个标准线性的栅格标志和一个与此相平行运行的另一个带距离编码参考点标志通道,每组两个参考点标志的距离是相同的,但两组之间两个相邻参考点标志的距离是可变的,每一段的距离加上一个固定的值,因此数控轴可以根据距离来确定其所处的绝对位置,如图下所示:(LS486C为例)A B C D E例如从A点移动到C,中间经过B点,系统检测到10.02就知道轴现在在是哪一个参考点位置,同样从B 点移动到D,中间经过C点,系统从C点到D点的距离是10.04就知道轴现在在是哪一个参考点位置,所以只要轴任意移动超过两个参考点距离(20mm)就能得到机床的绝对位置。
HEIDENHAIN公司的直线光栅尺后面带“C”的都有此功能,如“LF183C、LS486C、LB382C”等。
西班牙FAGOR公司的直线光栅尺中间带“O”的也有此功能,如“COV、COVP、FOP”等。
BFMSH —距离码光栅尺二. 应用在FANUC 数控系统0I-C 中应用。
1. 参数设定(此功能为选项功能 0ic 订货号A02B-0310-J670 18I 订货号A02B-0284-J670)1〕.1815#1 OPT 1815#2 DCL光栅尺使用类型:选择了带距离编码参考点标志的直线光栅尺。
(在使用圆光栅时 1815#1 #2 #3 均要设定为1 )2〕.1802#1 DC43〕.1821 相邻两个Mark1之间的距离直线光栅尺标准参考点标志栅格间距4〕.1882 相邻两个Mark2之间的距离5〕.1883 假想的光栅尺原点与参考点之间的距离以海德汉LB302C 光栅尺为例的参数设置相邻两个Mark1之间的距离 80mm相邻两个Mark2之间的距离 80.040mm想应参数设置如下:1815#1 1 1815#2 11802#1 DCL 设置为0 使用3参考点检测回零点1821 80000 (最小检测单位u )1882 80040 (最小检测单位u )1883 上电后回零 机床会移动3次自动计算零点的坐标位置。
海德汉光学尺参数设定

海德汉光学尺参数设定iTNC530/TNC 410C/426C/410M/426M 使用光學尺之相關參數設定MP 20.0:”多原點光學尺”絕對位置檢測功能。
例:%0111,X、Y、Z軸皆安裝光學尺。
(TNC 410C/426C/410M/426M/iTNC530) 注意:若MP1340.x= 0,請務必將MP20.0設為0,否則”Measuring system defective X/Y/Z”警示將產生。
MP110.x:光學尺回授線插槽。
例:若Y軸光學尺回授線插於LE410M之X2插槽,則MP110.1應設為”2”。
(TNC 410C/426C/410M/426M/iTNC530)MP115.0:光學尺信號種類。
(TNC 410C/426C/410M/426M/iTNC530)0:電壓式(1V pp)。
1:電流式(11μA)。
若無此參數,除非加裝特殊轉換接頭,否則該控制器僅可使用某一固定之信號種類。
MP210:位置回授信號之計數方向。
(TNC 410C/426C/410M/426M/iTNC530) 54321 軸輸入方式:% xxxxx0:正向計數。
1:負向計數。
若裝光學尺後,軸向產生暴衝現象時,可將該軸於MP210(或MP1040註)所相對應之位元由0設為1或由1設為0。
參數更改後,應確認操作上之軸向是否與機械移動方向吻合。
若不一致,則應將MP210及MP1040同時由0設為1或由1設為0。
例:當MP210 = %00000,MP1040= %00000,若此時Y軸產生暴衝時,則可將參數設為MP210 = %00010,MP1040 = %00000。
更改參數後,若操作上之軸向與機械移動方向不一致,則需將參數設為MP210 = %00000,MP1040 = %00010。
註:MP210及MP1040僅可改變其中一個參數,不可同時更改。
MP331.x:光學尺信號周期數之相對行程,亦即光學尺回授MP332.x之信號周期數後所產生之相對直線行程。
FANUC-关闭光栅尺参数及步骤说明
2. Changing of the Signal Period of the LC 100 from 16 µm to 20 µm2.1 TNCAbsolute encoders can be used starting with the TNC 426 M. The signal period is set in the parameters MP331.x and MP332.x.ExampleMP 331.x in [mm] MP 332.x in [mm]LC 181 0.016 1LC 182 0.02 12.2 SIEMENSFor the SIEMENS 840 D the parameters 31 010:= ENC_GRID_POINT_DIST and30 260:= ABS_INC_RATIO are responsible for the configuration.Example31 010(ENC_GRID_POINT_DIST)30 260(ABS_INC_RATIO)LC 181 0.016 mm 160LC 182 0.020 mm2002.3 INDRAMATThe INDRAMAT control mostly uses the data from the encoders (Word 15 and Word 16) in order to configure the control. This means that parameterization is not necessary.2.4 Service Concept for the LC 181If a linear encoder is exchanged in the field by the OEM or by the JH Service department, then the machine datum of the affected axis must remain exactly the same. Because of the mechanical mounting tolerance and the tolerance for the position of the glass scale within the linear encoder housing, this always means that the machine parameters must be changed. On the TNC these parameters are protected by a code number, and can only be changed by trained personnel.As described in IIV 22/2004, the LC 182 is the replacement encoder for the LC 181. Due to the changes to the signal period, in case of servicing, the machine parameters for the machine datum and for the signal period must be adapted. Cautionary notes will be added to page 5 of the mounting instructions for the LC 182. This chapter will be titled “LC 182 as replacement encoder for LC 181,” and will detail the electrical and mechanical differences between the two devices.(See 4.1)3. Adaptation of the Measuring Step for Purely Serial Interfaces3.1 LC 400 and LC 100 at the Position Input (SDU) of FANUC Controls(These data were given to JH by FANUC in English. They were not translated into German in order to prevent incorrect interpretation due to company-specific terminology.)Example 1: Ball-screw pitch: 5mm; Motor coupled directly (1:1)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm] Power-Mate i0.1 0.05 0.01RemarksPLC02000#0 1804#0 0 0 0Linear Motor2010#2 1954#2Linear motor is not used.Number of Velocity Pulses2023 1876 8192 8192 8192 Number of Position Pulses2024 1891 25000 25000 31250L / R*1 Position feedback Pulse conversion coefficient 2185 2628 2 4 16 *1 FFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / DÖ Detection unit: -- -- 0.1 0.05 0.01 [µm] CMRSetting value1820 1820(1) 2(2) 4(10) 20Note:Setting value = CMR * 2CMR ≥ 21802 #7 0 1 1 If CMR ≥2 set to 1 Reference Counter (N) 1821 1896 50000 100000 500000 Reference Counter (M)21792622from 90B0 s/wExample 2: Ball-screw pitch: 10mm; Motor coupled by gear 1:3 (motor 3rev : screw 1 rev)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm] Power-Mate i0.1 0.05 0.01RemarksPLC02000#0 1804#0 0 0 0Linear Motor2010#2 1954#2Linear motor is not used.Number of Velocity Pulses2023 1876 8192 8192 8192 Number of Position Pulses2024 1891 16667 16667 20833L / R*1 Position feedback Pulse conversion coefficient 2185 2628 2 4 16 *1 FFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / DÖ Detection unit: -- -- 0.1 0.05 0.01 [µm] CMRSetting value1820 1820(1) 2(2) 4(10) 20Note:Setting value = CMR * 2CMR ≥ 21802 #7 0 1 1 If CMR ≥2 set to 1 Reference Counter (N) 1821 1896 100000 200000 10000003.2 LC 400 and LC 100 at Speed Input (Linear Motor) of FANUC ControlsExample 1:Linear Motor L300A (30mm magnet pitch)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm]Power-Mate i 0.1 0.05 0.01Remarks PLC0 2000#0 1804#0 0 0 0 Only before 90B0 s/w Linear Motor 2010#2 1954#2 1 1 1 Linear motor is used.Number of VelocityPulses 2023 1876 1953 3906 19531 5000 x 20 / (512 x R) Number of PositionPulses 2024 1891 6250 12500 31250 16000 x 20 / (512 x R) Position feedback Pulseconversion coefficient 2185 2628 0 0 2AMR conversioncoefficient 2112 1705 300 600 3000 MP / RFFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / D Ö Detection unit: -- 0.10.050.01[µm]CMRSetting value 1820 (1)2(2)4(10)20Note:Setting value = CMR * 2CMR ≥ 2 1802 #7 0 1 1IfCMR≥2 set to 1 Reference Counter 1821 1896 10000 20000 100000(Arbitraryvalue) Example 2:Linear Motor L1500B (60mm magnet pitch)Command unit: 0.1µm (IS-C)Parameter No. Setting ValueItem FS 16i/18i/21i FS 15i Resolution of the LC [µm]Power-Mate i 0.1 0.05 0.01Remarks PLC0 2000#0 1804#0 0 0 0 Only before 90B0 s/w Linear Motor 2010#2 1954#2 1 1 1 Linear motor is used.Number of VelocityPulses 2023 1876 1953 3906 19531 5000 x 20 / (512 x R) Number of PositionPulses 2024 1891 6250 12500 31250 16000 x 20 / (512 x R) Position feedback Pulseconversion coefficient 2185 2628 0 0 2AMR conversioncoefficient 2112 1705 600 1200 6000 MP / RFFG (numerator) 2084 1977 1 1 1FFG (denominator) 2085 1978 1 1 1R / D Ö Detection unit: -- 0.10.050.01[µm]CMRSetting value 1820 (1)2(2)4(10)20Note:Setting value = CMR * 2CMR ≥ 2 1802 #7 0 1 1IfCMR≥2 set to 1 Reference Counter 1821 1896 10000 20000 100000(Arbitraryvalue)3.3 Mitsubishi ControlsIn the Mitsubishi protocol the measuring step is mostly described via additional information in the serial data word (identifier). Therefore no changes must be made to the machine parameters. The 10 nm resolution can be processed by the new generation of controls (MDS-D and MDS-DH) starting in mid-2004.4 Enclosure4.1 Excerpt from Page 5 of the Mounting Instructions for the LC 182 For the LC 192 only the changes to the mechanics are shown, since all measuring steps will continue to be available from the Service department.ØØ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
约翰内斯·海德汉博士(中国)有限公司
DR.JOHANNES HEIDENHAIN (CHINA) CO., LTD
北京市顺义区天竺空港工业区A 区天纬三街六号 邮编:101312
Fanuc 系统中海德汉光栅尺参数设定
1. 光栅尺相关参数
约翰内斯·海德汉博士(中国)有限公司
DR.JOHANNES HEIDENHAIN (CHINA) CO., LTD
北京市顺义区天竺空港工业区A 区天纬三街六号 邮编:101312
2. Example 1: 系统指令单位1µm,丝杠螺距为10mm ,减速比1/2, 光栅尺型号为
LS177,TTLx5,标准栅距为20µm,5倍细分后信号周期为4µm,光栅尺只有一个参考点。
● CMR=指令单位(1µm)/检测单位(1µm)=1,P1820=2xCMR=2
指令单位:CNC 发出一个指令脉冲时,机床所移动的距离。
检测单位:光栅尺可以检测机械位置的最小单位。
● 假设需要移动10mm ,系统需发送10mm/0.001=10 000 Pulse
机床移动10mm ,光栅尺反馈10mm/0.004=2500 Pulse N/M=10 000/2500=4/1 P2084=4 ;P2085=1. ● 速度反馈脉冲数P2023=8192
● 电机一转机床移动5mm ,由光栅尺反馈的脉冲数位5mm/0.004(光栅尺信号周期)
=1250 Pulse P2024=1250
● 参考计数器容量P1821为5000,6000.7000中的任意值. 3. Example 2:若还是同一坐标轴,换成LS177C ,TTLx5
● 其他参数同上,只有参考点参数设定不同 ● P1821=20 000 ● P1882=20 020
4. Example 3:同一坐标轴,光栅尺换成LB382C ,信号周期40µm。
● CMR=2
● 假设需要移动10mm ,系统需发送10mm/0.001=10 000 Pulse
机床移动10mm ,光栅尺反馈10mm/0.04=250 Pulse N/M=10 000/250=40/1 P2084=40 ;P2085=1.
● 电机一转机床移动5mm ,由光栅尺反馈的脉冲数位5mm/0.04(光栅尺信号周期)
=125 Pulse P2024=125 ● P1821=80 000 ● P1882=80 040。