1ABB Robotstudio6.03下载安装与破解
ABB-robotstudio破解方法-2016年
ABB-robotstudio破解方法-2016年2016年Robotstudio破解方法声明:为了让大家能够下载,提供一些下载券,特做处理,望见谅。
随着数控机床在机床制造领域的普及,现代机床在加工速度、加工精度和可靠性方面也都有了大幅提高,这在很大程度上得宜于机床用光栅测量元件。
1.在电脑运行regedit.exe,进入注册表一下目录:Window7 (32 位):[HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services]单场扫描技术和绝对式测量技术是当前角度和长度测量技术发展中最主要的两个方向,而且单场扫描技术和绝对式测量技术还可以组合应用。
同时采用这两种技术的单场扫描绝对式测量设备无论从信号质量、抗污染能力、测量速度还是可靠性来看都远远优于传统测量设备,此类产品在市场上的迅速推广也证实了这一点。
单场扫描技术传统的角度和长度测量设备所采用的四场成像式扫描方法中,光栅标尺与带有类似或相同光栅结构的扫描掩膜做相对运动。
穿过标尺与掩膜光线的明暗程度按标尺与掩膜相对位置的不同而有规律地变化:当标尺与掩膜的空隙吻合时,光线得以穿过;当栅线与空隙重合时,没有光线穿过。
感光元件将光强的变化转变为电子信号。
扫描掩膜上有四个扫描区,各扫描区光栅间互相错开1/4栅距,对应于这四个扫描区的感光元件生成相位差为90°的四个正弦信号。
这四个扫描信号不以零线为其中线,所以需要将四个信号两两相减,以获得两个90°相位差,中线为零线的输出信号l1和l2。
图1 四场成像式光电扫描法原理在示波器XY显示模式下可明显地看到单场扫描的这个优点(图2):单场扫描光栅尺的输出信号具有更好的圆度和更小的信号噪声,这意味着更高的定位精度和更佳的控制品质。
对直线电机而言,配备了单场扫描光栅尺后,速度控制可以更为平滑。
覆盖光栅标尺全宽的大尺寸扫描面以及交替重复出现的条状扫描区使得采用单场扫描原理的测量设备对污染的干扰特别不敏感,这可通过抗污染试验来证实:即便在有大面积污染干扰时,测量设备仍任能提供高质量的测量信号(图3),位置误差远低于测量设备标定精度等级所对应的误差值。
RobotStudio安装教程2.0
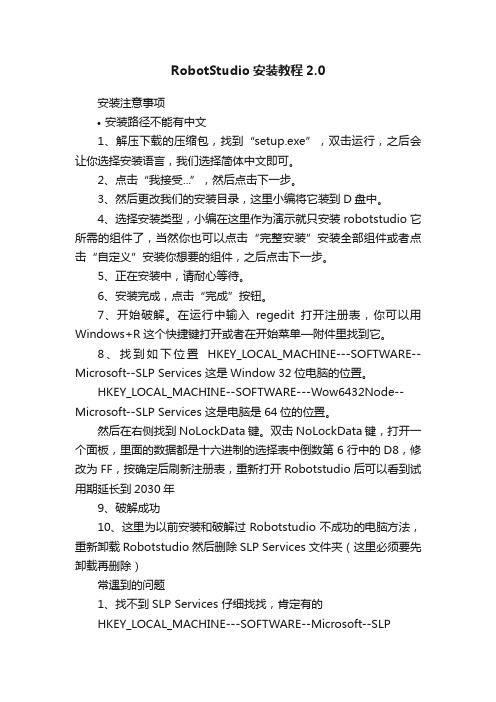
RobotStudio安装教程2.0安装注意事项•安装路径不能有中文1、解压下载的压缩包,找到“setup.exe”,双击运行,之后会让你选择安装语言,我们选择简体中文即可。
2、点击“我接受...”,然后点击下一步。
3、然后更改我们的安装目录,这里小编将它装到D盘中。
4、选择安装类型,小编在这里作为演示就只安装robotstudio它所需的组件了,当然你也可以点击“完整安装”安装全部组件或者点击“自定义”安装你想要的组件,之后点击下一步。
5、正在安装中,请耐心等待。
6、安装完成,点击“完成”按钮。
7、开始破解。
在运行中输入regedit打开注册表,你可以用Windows+R这个快捷键打开或者在开始菜单—附件里找到它。
8、找到如下位置HKEY_LOCAL_MACHINE---SOFTWARE--Microsoft--SLP Services 这是Window 32位电脑的位置。
HKEY_LOCAL_MACHINE--SOFTWARE---Wow6432Node--Microsoft--SLP Services 这是电脑是64位的位置。
然后在右侧找到NoLockData键。
双击NoLockData键,打开一个面板,里面的数据都是十六进制的选择表中倒数第6行中的D8,修改为FF,按确定后刷新注册表,重新打开Robotstudio后可以看到试用期延长到2030年9、破解成功10、这里为以前安装和破解过Robotstudio不成功的电脑方法,重新卸载Robotstudio然后删除SLP Services文件夹(这里必须要先卸载再删除)常遇到的问题1、找不到SLP Services 仔细找找,肯定有的HKEY_LOCAL_MACHINE---SOFTWARE--Microsoft--SLPServices 这是Window 32位电脑的位置。
HKEY_LOCAL_MACHINE--SOFTWARE---Wow6432Node--Microsoft--SLP Services 这是电脑是64位的位置。
工业机器人离线编程(ABB)2-1 安装RobotStudio
二、实践操作
1、下载RobotStudio • 本课程所用软件版本为RobotStudio6.01,课程中的案例在6.01以下版本
中可能无法正常打开或使用,请及时更新软件。
二、实践操作
2、安装RobotStudio
二、实践操作
2、安装RobotStudio
二、实践操作
2、安装RobotStudio
2-1 安装工业机器人离线编程仿真软件 RobotStudio
一、工作任务
• 1、学会下载RobotStudio。 • 2、学会RobotStudio的正确安装。
二、实践操作
1、下载RobotStudio • 本课程所用软件版本为RobotStudio6.01,课程中的案例在6.01以下版本
中可能无法正常打开或使用,请及时更新软件。
接虚拟控制器这样的问题,所以建议关闭防火墙或对防火墙的参数进行恰 当的设定。
Байду номын сангаас
三、总结
为了确保RobotStudio能够正确的安装,请注意以下的事项: • 1、计算机的系统配置建议如下:
硬件 CPU 内存 硬盘 显卡
操作系统
要求 i5或以上 2G或以上 空闲20G以上 独立显卡
WIN7或以上
三、总结
为了确保RobotStudio能够正确的安装,请注意以下的事项: • 2、操作系统中的防火墙可能会造成RobotStudio的不正常运行,如无法连
ABB robotstudio破解方法(完整版)
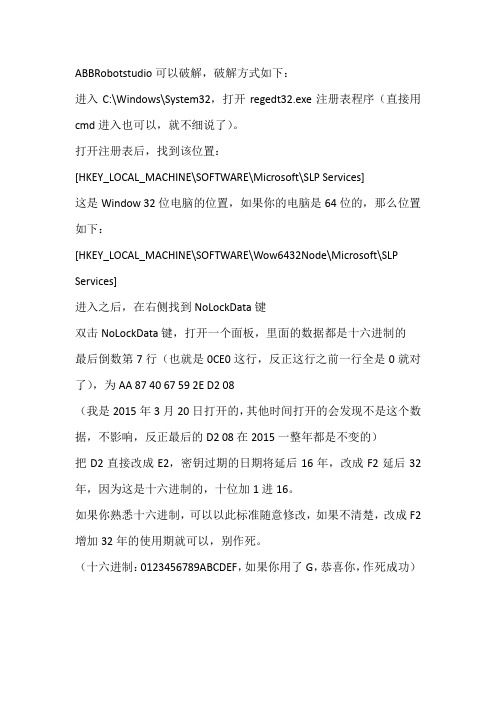
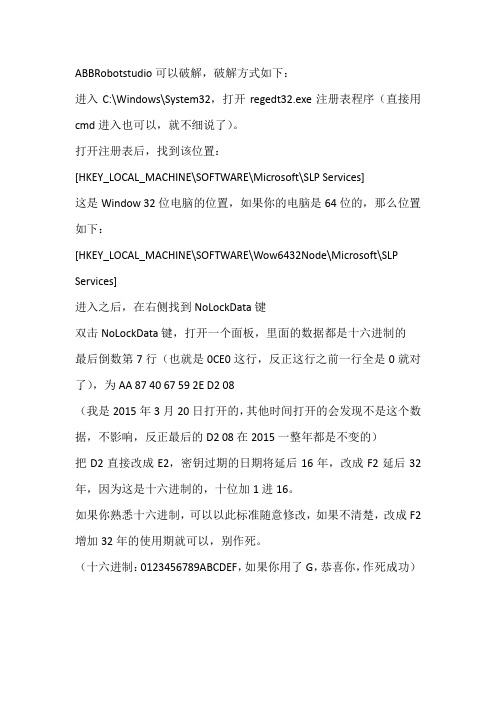
ABBRobotstudio可以破解,破解方式如下:
进入C:\Windows\System32,打开regedt32.exe注册表程序(直接用cmd进入也可以,就不细说了)。
打开注册表后,找到该位置:
[HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services]
这是Window 32位电脑的位置,如果你的电脑是64位的,那么位置如下:
[HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\Microsoft\SLP Services]
进入之后,在右侧找到NoLockData键
双击NoLockData键,打开一个面板,里面的数据都是十六进制的
最后倒数第7行(也就是0CE0这行,反正这行之前一行全是0就对了),为AA 87 40 67 59 2E D2 08
(我是2015年3月20日打开的,其他时间打开的会发现不是这个数据,不影响,反正最后的D2 08在2015一整年都是不变的)
把D2直接改成E2,密钥过期的日期将延后16年,改成F2延后32年,因为这是十六进制的,十位加1进16。
如果你熟悉十六进制,可以以此标准随意修改,如果不清楚,改成F2增加32年的使用期就可以,别作死。
(十六进制:0123456789ABCDEF,如果你用了G,恭喜你,作死成功)。
RobotStudio6.05最新注册方法

技术交流群511987758 ABB机器人RobotStudio 5.x /6.x破解方法(20171125)最近很多朋友问我注册码,我今天给大家分享一下软件破解方法。
网上很多方法都是局限的,我的这种方法,无论你什么版本都可以破解,废话不说了,下面开始首先你的电脑系统必须是64位,这个很重要,因为SLP位置地址不同。
然后只要复制下面这段LOCK解码,保存到注册表项 (.reg)格式,建立完成后点击添加到注册表即可。
然后打开你的RobotStudio5.x/6.X 后日期可用9000多天,以下是复制内容:Windows Registry Editor Version 5.00[HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\Microsoft\SLP Services]"ComputerIdData_165"=hex:0b,33,2e,32,2e,31,39,33,34,2e,36,3 1,29,00,00,00,00,00,\00,00,00,74,73,f0,60,6a,3f,d2,08,10,00,00,00,08,f2,e3,57,e5 ,e1,df,45,97,de,\5e,43,a5,dc,9c,65,01,00,00,00,00,00,00,00 "NoLockData"=hex:0b,33,2e,32,2e,31,39,33,34,2e,36,31,90,08, 00,00,01,00,00,00,\0b,33,2e,32,2e,31,39,33,34,2e,36,31,57,08,00,00,08,30,2e,30 ,2e,31,39,32,37,\2f,07,00,00,26,41,42,42,20,2d,20,6c,69,63,65,6e,73,65,5f,73 ,75,70,70,6f,72,\74,2e,73,65,72,6f,70,40,73,65,2e,61,62,62,2e,63,6f,6d,0b,52,6f,62,6f,74,53,\74,75,64,69,6f,03,35,2e,78,07,44,65,66,61,75,6c,74,03,00,00 ,00,0c,42,30,41,\37,42,36,32,39,38,33,30,38,50,c0,c5,cb,11,74,cf,08,80,45,76 ,12,75,ac,cd,08,\0b,00,00,00,0b,33,2e,32,2e,31,39,33,30,2e,37,39,31,00,00,00 ,07,45,78,65,63,\75,74,65,00,c0,3e,62,14,26,6a,27,ff,ff,ff,7f,ff,ff,ff,7f,ff ,ff,ff,ff,ff,ff,\ff,7f,00,00,00,00,00,00,00,00,00,00,80,64,f8,92,17,00,00,0b ,33,2e,32,2e,31,\39,33,30,2e,37,39,38,00,00,00,0e,49,47,45,53,5f,43,6f,6e,76 ,65,72,74,65,72,\00,c0,3e,62,14,26,6a,27,ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff,ff ,ff,ff,ff,7f,00,\00,00,00,00,00,00,00,00,ff,ff,ff,ff,ff,ff,ff,7f,0b,33,2e,32 ,2e,31,39,33,30,\2e,37,39,3c,00,00,00,12,49,6e,76,65,6e,74,6f,72,5f,43,6f,6e ,76,65,72,74,65,\72,00,c0,3e,62,14,26,6a,27,ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff ,ff,ff,ff,ff,7f,\00,00,00,00,00,00,00,00,00,ff,ff,ff,ff,ff,ff,ff,7f,0b,33,2e ,32,2e,31,39,33,\30,2e,37,39,2f,00,00,00,05,54,72,69,61,6c,00,c0,3e,62,14,26 ,6a,27,ff,ff,ff,\7f,ff,ff,ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00,00,00,00,00,00,00 ,00,00,ff,ff,ff,\ff,ff,ff,ff,7f,0b,33,2e,32,2e,31,39,33,30,2e,37,39,38,00,00 ,00,0e,53,54,45,\50,5f,43,6f,6e,76,65,72,74,65,72,00,c0,3e,62,14,26,6a,27,ff ,ff,ff,7f,ff,ff,\ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00,00,00,00,00,00,00,00,00,ff ,ff,ff,ff,ff,ff,\ff,7f,0b,33,2e,32,2e,31,39,33,30,2e,37,39,31,00,00,00,07,50 ,72,65,6d,69,75,\6d,00,c0,3e,62,14,26,6a,27,ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff ,ff,ff,ff,ff,7f,\00,00,00,00,00,00,00,00,00,ff,ff,ff,ff,ff,ff,ff,7f,0b,33,2e ,32,2e,31,39,33,\30,2e,37,39,35,00,00,00,0b,53,63,72,65,65,6e,4d,61,6b,65,72 ,00,c0,3e,62,14,\26,6a,27,ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00 ,00,00,00,00,00,\00,00,00,ff,ff,ff,ff,ff,ff,ff,7f,0b,33,2e,32,2e,31,39,33,30,2e,37,39,38,00,\00,00,0e,50,72,6f,45,5f,43,6f,6e,76,65,72,74,65,72,00,c0,3e ,62,14,26,6a,27,\ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00,00,00,00 ,00,00,00,00,00,\ff,ff,ff,ff,ff,ff,ff,7f,0b,33,2e,32,2e,31,39,33,30,2e,37,39 ,3a,00,00,00,10,\56,44,41,2d,46,53,5f,43,6f,6e,76,65,72,74,65,72,00,c0,3e,62 ,14,26,6a,27,ff,\ff,ff,7f,ff,ff,ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00,00,00,00,00 ,00,00,00,00,ff,\ff,ff,ff,ff,ff,ff,7f,0b,33,2e,32,2e,31,39,33,30,2e,37,39,3c ,00,00,00,12,43,\41,54,49,41,5f,56,34,5f,43,6f,6e,76,65,72,74,65,72,00,c0,3e ,62,14,26,6a,27,\ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00,00,00,00 ,00,00,00,00,00,\ff,ff,ff,ff,ff,ff,ff,7f,0b,33,2e,32,2e,31,39,33,30,2e,37,39 ,3c,00,00,00,12,\43,41,54,49,41,5f,56,35,5f,43,6f,6e,76,65,72,74,65,72,00,c0 ,3e,62,14,26,6a,\27,ff,ff,ff,7f,ff,ff,ff,7f,ff,ff,ff,ff,ff,ff,ff,7f,00,00,00 ,00,00,00,00,00,\00,ff,ff,ff,ff,ff,ff,ff,7f,0b,00,00,00,12,43,41,54,49,41,5f ,56,34,5f,43,6f,\6e,76,65,72,74,65,72,40,00,00,00,42,5d,c4,4b,45,c0,62,a1,61 ,e0,ee,6c,30,c0,\5b,e5,1b,4e,5a,3e,24,e4,72,e0,ce,54,1c,9b,3f,1d,56,21,19,19 ,0a,54,cd,67,a4,\76,c3,13,a0,39,68,8d,05,f1,82,ea,f5,d5,db,4f,7c,64,0e,21,a1 ,1d,57,45,2e,59,\12,43,41,54,49,41,5f,56,35,5f,43,6f,6e,76,65,72,74,65,72,40 ,00,00,00,6e,6f,\7f,d7,5e,55,31,76,06,21,36,62,d8,1e,84,59,36,f8,08,98,85,0e ,e3,1a,20,2f,5b,\13,c5,75,54,52,30,21,18,90,8a,57,b5,34,32,63,48,f1,c5,5e,3b ,b3,47,7f,64,09,\bc,5b,16,f1,15,06,01,33,41,e8,56,c1,07,45,78,65,63,75,74,65 ,40,00,00,00,9e,\2b,a3,75,50,40,2e,1e,41,a0,42,b1,48,98,45,62,14,f6,b0,be,50 ,60,5c,75,3f,16,\fe,01,ca,00,45,80,1e,00,b1,35,2b,42,e5,e1,22,a0,68,e9,56,f8 ,0c,31,d1,74,19,\e7,ca,64,61,3f,0b,d3,a1,95,62,aa,2b,40,0e,49,47,45,53,5f,43,6f,6e,76,65,72,\74,65,72,40,00,00,00,53,1a,43,41,a9,34,26,59,6e,2f,92,4c,27 ,0d,a4,eb,18,0a,\1d,bd,59,6a,10,b8,7d,b9,b8,90,5c,28,da,a5,87,2c,5b,02,43,58 ,ca,1e,e0,34,ec,\48,bf,2a,5c,39,b5,18,eb,d6,df,d9,8d,75,55,d0,25,d0,c6,ab,fe ,34,12,49,6e,76,\65,6e,74,6f,72,5f,43,6f,6e,76,65,72,74,65,72,40,00,00,00,fe ,87,37,3f,f4,da,\67,66,2c,4f,8e,70,30,b3,c3,d7,f6,37,94,15,ac,74,31,b2,be,5d ,78,12,97,ae,a4,\3c,6f,74,2f,44,64,84,18,13,1a,df,80,77,21,8a,cd,76,52,f0,51 ,da,79,4c,3b,f1,\f3,c2,a0,f5,6e,75,83,9a,07,50,72,65,6d,69,75,6d,40,00,00,00 ,1b,14,ed,0e,75,\91,6d,fd,46,34,32,9f,ae,5a,b1,12,0b,84,71,f6,b9,a5,77,b4,17 ,7c,1a,2e,da,0f,\d2,3f,6f,54,1b,7a,dd,8c,30,e1,e9,6f,b1,d4,7b,c6,c1,3b,3a,f4 ,4d,e5,bd,03,46,\6b,a5,f0,65,31,c5,b6,74,98,0e,50,72,6f,45,5f,43,6f,6e,76,65 ,72,74,65,72,40,\00,00,00,f1,c1,a0,6d,6f,49,20,02,ec,8b,f5,d7,b8,7e,76,0e,31 ,de,96,be,78,3b,\87,2d,ca,b0,67,22,57,14,a0,4d,b3,ae,bf,62,a7,08,fd,dc,70,39 ,d4,de,b9,e1,5c,\d7,bd,95,b5,b1,a8,24,6b,47,ed,a5,a5,b5,e2,7f,96,a5,0b,53,63 ,72,65,65,6e,4d,\61,6b,65,72,40,00,00,00,57,4c,7e,19,cc,bf,41,e8,c7,d4,e8,4f ,91,58,6a,90,ec,\39,4b,82,4d,d5,c5,6f,3a,39,ef,da,e3,d3,c2,d5,b4,44,d3,ba,e7 ,1f,02,96,5d,bd,\24,79,e5,56,42,6c,c7,03,11,dc,e4,76,44,95,89,14,7c,37,29,f2 ,32,d8,0e,53,54,\45,50,5f,43,6f,6e,76,65,72,74,65,72,40,00,00,00,09,ed,ab,49 ,5b,22,66,48,d6,\bb,5f,c5,0e,ed,f9,b9,49,92,65,2a,3c,19,59,b7,7d,5f,df,77,5e ,2b,5d,21,80,39,\ca,cd,d1,6e,fe,19,15,2c,21,9f,48,a3,7a,f3,49,34,0f,6e,57,fe ,bc,3f,1a,43,24,\09,23,ad,6c,e5,05,54,72,69,61,6c,40,00,00,00,f4,3a,bb,40,49 ,ed,05,25,b5,95,\e6,5a,32,d7,19,49,aa,20,1a,51,4a,c5,55,e3,ff,88,30,35,07,7e ,26,ce,cc,e3,51,\2b,ac,87,fd,9e,47,c2,63,b4,24,12,c3,45,b1,e8,2d,66,a1,db,11,e4,6e,41,e6,0f,\0f,38,82,ec,10,56,44,41,2d,46,53,5f,43,6f,6e,76,65,72,74,65 ,72,40,00,00,00,\5e,29,10,04,8d,7d,ce,77,18,2c,41,ee,e0,26,49,23,30,e4,74,d0 ,0f,c9,bd,06,09,\75,39,90,bc,d0,47,cc,45,1f,40,de,42,3e,e6,3f,83,4f,8a,a4,7f ,60,10,ca,78,da,\e2,7d,e8,7c,18,03,99,6b,73,4e,1f,28,77,7f,00,1d,32,41,37,53 ,53,2d,54,59,50,\59,59,2d,59,46,38,4d,57,2d,32,37,52,43,34,2d,42,4b,54,55,56 ,00,00,00,00,00,\00,00,05,00,00,00,00,00,00,00,01,00,00,00,02,00,00,00,00,01 ,00,00,02,54,2b,\82,d1,50,21,8e,1d,3d,c4,2b,15,5f,9e,9c,8b,2b,55,d8,fd,d2,89 ,20,f4,c2,ca,7d,\e3,df,f4,bb,1d,0d,10,14,31,92,6a,95,fa,93,4a,df,86,9a,48,60 ,25,88,a9,48,f1,\da,21,dd,ae,8f,5b,28,2d,b2,41,fa,a3,88,89,32,a5,0a,8b,04,4f ,76,3a,1d,c8,1e,\4f,29,86,d1,9f,b6,e0,be,2f,8e,47,1b,4c,96,3d,da,aa,7a,ac,88 ,fb,58,3d,66,be,\1f,97,ae,2a,d7,b9,df,bb,85,cd,43,00,d1,d0,80,fd,f3,7b,5a,a2 ,05,0f,ac,09,26,\58,62,b9,bd,72,8a,a7,87,1b,d6,94,04,a1,c6,0c,df,68,0d,20,d0 ,92,31,4c,07,b0,\1b,a0,f3,fc,c6,c4,0d,63,af,1b,7d,c1,b6,45,b8,58,c9,c8,26,f4 ,f3,54,db,ff,6d,\9b,61,c1,45,a9,05,aa,3e,b0,67,5e,47,51,2a,25,4a,bb,26,04,35 ,1c,dc,11,66,0c,\ac,94,69,74,0f,db,f6,67,5b,06,e5,eb,6b,67,71,bd,b4,4f,ff,4e ,88,46,88,e8,96,\17,16,77,c4,56,9c,ec,34,b0,98,9a,e5,69,b1,61,9d,be,58,ab,da ,5b,a9,23,90,92,\8d,8e,b6,00,00,00,00,00,00,00,00,00,00,00,00,a1,c4,4c,61,6a ,3f,f2,08,00,00,\00,00,4f,51,d6,ab,db,4e,d2,08,10,00,00,00,00,00,00,00,00,00 ,00,00,00,00,00,\00,00,00,00,00,a9,01,00,00,00,00,00,00"_tmpbalikeda63"=hex:03,00,00,00,20,32,63,61,61,33,32,64,31 ,38,31,37,63,34,34,\62,31,61,64,65,62,38,37,31,32,35,31,32,39,39,61,37,34,0b,33 ,2e,32,2e,31,39,\33,34,2e,36,31,20,32,63,61,61,33,32,64,31,38,31,37,63,34,34 ,62,31,61,64,65,\62,38,37,31,32,35,31,32,39,39,61,37,34,e7,33,3b,8e,db,4e,d2,08,a0,12,00,00,\0f,52,6f,62,6f,74,53,74,75,64,69,6f,2e,65,78,65,0d,41,64,6d ,69,6e,69,73,74,\72,61,74,6f,72,0f,4d,5a,44,4c,4f,4d,38,34,4c,37,42,51,4b,4d ,54,00,00,00,00,\0b,33,2e,32,2e,31,39,33,34,2e,36,31,10,4d,69,63,72,6f,73,6f ,66,74,20,4d,61,\73,74,65,72,09,55,6e,64,65,66,69,6e,65,64,03,31,2e,30,20,33 ,61,36,64,30,61,\65,38,61,39,35,61,34,64,61,66,39,37,37,64,66,31,33,62,39,65 ,38,31,32,63,32,\65,0b,33,2e,32,2e,31,39,33,34,2e,36,31,20,33,61,36,64,30,61 ,65,38,61,39,35,\61,34,64,61,66,39,37,37,64,66,31,33,62,39,65,38,31,32,63,32 ,65,ad,a7,c5,ab,\db,4e,d2,08,a0,12,00,00,0f,52,6f,62,6f,74,53,74,75,64,69,6f ,2e,65,78,65,0d,\41,64,6d,69,6e,69,73,74,72,61,74,6f,72,0f,4d,5a,44,4c,4f,4d ,38,34,4c,37,42,\51,4b,4d,54,00,00,00,00,0b,33,2e,32,2e,31,39,33,34,2e,36,31 ,26,41,42,42,20,\2d,20,6c,69,63,65,6e,73,65,5f,73,75,70,70,6f,72,74,2e,73,65 ,72,6f,70,40,73,\65,2e,61,62,62,2e,63,6f,6d,0b,52,6f,62,6f,74,53,74,75,64,69 ,6f,03,35,2e,78,\20,65,63,34,33,63,63,66,62,66,33,32,35,34,36,66,31,38,37,65 ,34,30,30,64,33,\31,35,33,35,30,65,30,65,0b,33,2e,32,2e,31,39,33,34,2e,36,31 ,20,65,63,34,33,\63,63,66,62,66,33,32,35,34,36,66,31,38,37,65,34,30,30,64,33 ,31,35,33,35,30,\65,30,65,b4,38,b2,8e,db,4e,d2,08,a0,12,00,00,0f,52,6f,62,6f ,74,53,74,75,64,\69,6f,2e,65,78,65,0d,41,64,6d,69,6e,69,73,74,72,61,74,6f,72 ,0f,4d,5a,44,4c,\4f,4d,38,34,4c,37,42,51,4b,4d,54,00,00,00,00,0b,33,2e,32,2e ,31,39,33,34,2e,\36,31,26,41,42,42,20,2d,20,6c,69,63,65,6e,73,65,5f,73,75,70 ,70,6f,72,74,2e,\73,65,72,6f,70,40,73,65,2e,61,62,62,2e,63,6f,6d,0b,52,6f,62 ,6f,74,53,74,75,\64,69,6f,03,35,2e,78。
ABB软件破解方法

ABBRobotstudio
可以破解,破解方式如下:
进入C:\Windows\System32,打开regedt32.exe注册表程序(直接用cmd进入也可以,就不细说了)。
打开注册表后,找到该位置:
[HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services]
这是Window 32位电脑的位置,如果你的电脑是64位的,那么位置如下:
[HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\Microsoft\SLP Services]
进入之后,在右侧找到NoLockData键,双击NoLockData键,打开一个面板,里面的数据都是十六进制的,最后倒数第7行(也就是0CE0这行,反正这行之前一行全是0就对了),为AA 87 40 67 59 2E D2 08 (我是2015年3月20日打开的,其他时间打开的会发现不是这个数据,不影响,反正最后的D2 08在2015一整年都是不变的)把D2直接改成E2,密钥过期的日期将延后16年,改成F2延后32年,因为这是十六进制的,十位加1进16。
如果你熟悉十六进制,可以以此标准随意修改,如果不清楚,改成F2增加32年的使用期就可以,别作死。
(十六进制:0123456789ABCDEF,如果你用了G,恭喜你,作死成功)。
robotstudio 6.0以上版本的安装

安装要求:
Robot studio6以上的版本安装要求比较高,所以硬件和操作系统必需达到要求。
其中,操作系统必须在windows7以上的。
下载:
进入网址:打开页面
点击download,下载6.01以上的版本,例如现在可以下载6.05的版本
下面是配套的附加选项功能,包括弧焊,切割,喷涂,码垛等。
下载完成以后安装:
双击
系统自动配置,按照其默认状态向导去做,不要修改里面的东西,避免错误发生。
安装的目录里面不能有中文,并且要关闭电脑的防火墙,有的电脑会重启,等待安装完毕。
高级版在建模和仿真里面所有的组件都是可以使用的
基本版无全功能授权,一些菜单是灰色的
仍可以使用示教器进行基本的操作,仍可添加控制器对真实的机器人进行在线的控制,编辑,和配置的修改。
激活方式:
文件,选项,授权,激活向导,单机许可证,互联网激活,会从ABB获得一个激活密钥,输进去。
每个激活码只能激活一个电脑一次,会显示还有多少天可以用。
注意:系统重装以后,激活码失效,给ABB发邮件,ABB重置一下后台系统,判断一下你所处的情况,重新申请。
ABBRobotstudio仿真软件项目式使用说明

ABBRobotstudio仿真软件项目式使用说明1.打开Robot studio软件,单击创建新建空工作站,同时储存一下,如下图所示;2.选择ABB机器人模型IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下图所示:3.导入设备-tools-Binzel air 22,并拖动安装在机器人法兰盘上:4.选择建模-固体-矩形体,设定长宽高,点击创建:选择差不多-机器人系统-从布局创建系统-下一步-下一步-完成;操纵器启动完成后,选择路径-创建一个空路径,创建成功后,修改下方参数:moveJ ,V1000,Z1008.激活当前路径,选择机器人起点,单击示教指令9.开启捕捉末端或角点,同时将机器人的移动模式设为手动线性,将机器人工具移到矩形体的一个角点上,单击示教指令,形成第一条路径,依次示教四个角点,形成路径,右击路径,选择查看机器人目标,可将机器人移动到当前位置10.路径制作完成后,选择差不多-同步到VC,在弹出的对话框中全部勾选,并点击确定,同步完成后选择仿真-仿真设定-将路径添加到主队列,选择应用--确定;11.选择仿真录像,点击播放,开始仿真录像。
项目二:搬运机器人1.新建空工作站--导入机器人IRB4600--选择最大承重能力,选择建模-固体-圆柱体,添加两个圆柱体,半径为200mm,高度分不为60mm和500 mm,把其中一个作为工具添加到法兰盘上,同时导入两个设备Euro pallet 如下图所示:2.右击物体或在左侧布局窗口中右击物体名称,在下拉菜单中选择设定颜色来更换颜色:3.按照布局创建机器人系统,细节与项目一相同,系统完全启动后,选择操纵器-配置编辑器,在下拉菜单中选择I/O,在弹出窗口中新建Unit,细节如下图所示;4.Unit新建完毕后,右击新建signal,新建do1和do2,细节如下图所示:新建完毕后,重启操纵器重启完毕后,选择仿真-配置-事件治理器-添加事件,细节如下图所示:7.事件添加完成后,开始创建路径啊,依次示教,机器人到达指定位置时,右击插入逻辑指令,如图所示:8.路径创建完成后,同步到VC,仿真设定,然后进行仿真录像项目三:叉车搬运1.打开软件,新建空工作站,导入机器人模型IRB4600,选择最大承重能力,然后选择差不多--导入几何体--扫瞄几何体--选择本地几何体--打开,如下图所示:2.利用平移和旋转指令,将不同几何体按下图位置摆放整齐:创建一个300*300*70的方体分不作为tool,将其创建为工具,具体操作如下图所示:4.设定tool的本地原点为它的中心点,如下图所示:5.选中tool,点击创建工具,将tool创建为工具,具体操作如下:创建完成后将其安装在机器人法兰盘上,右击机器人选择显示机器人工作范畴,可看到机器人最大到达距离,再次选择取消显示:创建四个200*200*200的方体分不作为Box1~Box4,设定为不同颜色,将Box2~Box4设为不可见布局终止,如下图所示:,6.按照布局创建机器人系统,待系统启动完毕后,选择操纵器--配置编辑器-新建Unit --新建signal,包括do1~do 15,如下图所示:7.设置完成后,重启操纵器,打开事件治理器,添加所需事件,包括显示对象,附加对象,提取对象,移动对象四类事件,具体如下:显示对象具体设置如下:附加对象具体设置如下提取对象设置如下:移动对象设置如下:事件添加完成后,创建路径,分不将Box1,Box2,Box3,Box4移动到垛板上,并排列整齐,路径如下图所示9.路径创建完成后,同步到VC :10.同步完成后进行仿真设定,按下图顺序添加路径,之后进行仿真录像:。
Abb_robotstudio安装教程
Abb robotstudio安装教程
1、各个版本的robot安装方式是一样的。
2、解压安装包
3、选择语言为中文
4、选择安装产品
5、首先安装
robotware
6、点击下一步
7、点击下一步
8、在选择安装路径时只需要把C改为D就可以了。
9、安装robot完毕后安装robotstudio回到初始界面
10、安装robotstudio
11、点击下一步
12、下一步
13、将路径的C改为D,方法如上
14、64位windows系统会出现两个图标,
15、可以同时使用
16、32位系统只有一个图标,还是正常使用。
17、打开软件点击选项
18、点击授权
19、查看软件使用到期时间。
20、关闭软件,破解开始。
21、在开始下输入regedit回车
22、进入注册表编辑器
23、在这里32位系统和64位系统注册表文件路径有所不
同,现在以64位系统为例
24、双击打开后进入编辑
25、破解完毕打开robot
26、选项---》授权- 查看已安装许可证
27、时间变为2029年破解成功.
28、注意:32位系统没有此步骤直接跳到下
一步。
ABB机器人使用robotstudio系统安装步骤

ABB机器人系统安装步骤
在工业机器人维护与保养中,若出现机器人系统崩溃或者无法解决的错误,常常需要重新安装系统,介绍用robotstudio制作系统,方法如下:
1、机器人做”X”启动BOOT Application,进入系统引导界面
2、打开RobotStudio
3、点击安装管理器
4、点击打开
5、点击新建
6、编辑新系统的名称,选择系统备份路径,单击“下一步”
7、点击“下一步”
8、点击“添加”
9、选择系统秘钥,确定,下一步
10、核对系统选项,点击“下一步”,系统选项要与原系统选项一致,否则会出错。
11、点击“应用”
12、选择“是”机器人重启,自动进入新系统
系统安装过程中,请不要随意更改步骤,否则会安装失败,失败后,则无法重新安装,只能请ABB工程技术人员进行安装(代价不是一般的大)。
robotstudio破解方法(完整版)
ABBRobotstudio可以破解,破解方式如下:
进入C:\Windows\System32,打开regedt32.exe注册表程序(直接用cmd进入也可以,就不细说了)。
打开注册表后,找到该位置:
[HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\SLP Services]
这是Window 32位电脑的位置,如果你的电脑是64位的,那么位置如下:
[HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\Microsoft\SLP Services]
进入之后,在右侧找到NoLockData键
双击NoLockData键,打开一个面板,里面的数据都是十六进制的
最后倒数第7行(也就是0CE0这行,反正这行之前一行全是0就对了),为AA 87 40 67 59 2E D2 08
(我是2015年3月20日打开的,其他时间打开的会发现不是这个数据,不影响,反正最后的D2 08在2015一整年都是不变的)
把D2直接改成E2,密钥过期的日期将延后16年,改成F2延后32年,因为这是十六进制的,十位加1进16。
如果你熟悉十六进制,可以以此标准随意修改,如果不清楚,改成F2增加32年的使用期就可以,别作死。
(十六进制:0123456789ABCDEF,如果你用了G,恭喜你,作死成功)。
abb仿真 破解方法
abb仿真破解方法随着科技的不断发展,电气自动化领域的ABB仿真软件在工程设计和控制系统研发中发挥着越来越重要的作用。
然而,正版ABB仿真软件价格高昂,让许多个人和企业望而却步。
本文将介绍一种ABB仿真破解方法,并提供一些破解注意事项。
一、ABB仿真简介ABB仿真是一款功能强大的电气自动化仿真软件,可以帮助工程师在设计阶段对控制系统进行仿真测试,以验证其性能和可靠性。
通过ABB仿真软件,用户可以模拟各种复杂的工程场景,对控制系统进行调试和优化,从而提高工程质量。
二、ABB仿真破解方法1.搜索破解版ABB仿真软件:在网络搜索引擎中输入“ABB仿真破解版”,可以找到一些破解论坛和下载链接。
但请注意,这些资源的合法性和安全性无法保证。
2.下载破解版软件:在找到合适的破解资源后,下载并安装破解版ABB仿真软件。
在安装过程中,需要按照破解教程的指引进行操作,例如使用破解补丁、注册机等工具。
3.激活软件:安装完成后,使用破解版ABB仿真软件进行激活。
一般情况下,破解版软件已经自带激活工具,只需按照提示进行操作即可。
4.更新与维护:在使用破解版软件的过程中,注意查看官方网站和论坛,了解软件的最新版本和更新信息。
如有需要,及时下载更新补丁,以确保软件的正常运行。
三、破解注意事项1.安全风险:使用破解版软件存在一定的安全风险,因为这些软件可能携带病毒、木马等恶意程序。
在下载和安装破解版软件时,务必谨慎对待,检查文件的完整性和安全性。
2.法律法规:在我国,破解软件属于违法行为。
在使用破解版ABB仿真软件时,请充分了解相关法律法规,遵守版权意识,以免触犯法律。
3.技术支持:破解版软件可能无法享受到原厂的技术支持和服务,因此在遇到问题时,需自行寻找解决方案或请教同行。
四、仿真在工程应用中的优势1.提高设计质量:通过仿真软件对控制系统进行模拟和测试,可以提前发现并解决潜在问题,降低设计失误的风险。
2.缩短研发周期:仿真软件可以帮助工程师快速验证和优化控制系统方案,提高研发效率。
ABBRobotstudio仿真软件项目式使用说明

工程一:焊接机器人1.翻开Robot studio软件,单击创立新建空工作站,同时保存一下,如下列图所示;2.选择ABB机器人模型IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下列图所示:3.导入设备-tools-Binzel air 22,并拖动安装在机器人法兰盘上:4.选择建模-固体-矩形体,设定长宽高,点击创立:5.选择根本-机器人系统-从布局创立系统-下一步-下一步-完成;6.控制器启动完成后,选择路径-创立一个空路径,7.创立成功后,修改下方参数:moveJ ,V1000,Z1008.激活当前路径,选择机器人起点,单击示教指令9.开启捕捉末端或角点,同时将机器人的移动模式设为手动线性,将机器人工具移到矩形体的一个角点上,单击示教指令,形成第一条路径,依次示教四个角点,形成路径,右击路径,选择查看机器人目标,可将机器人移动到当前位置10.路径制作完成后,选择根本-同步到VC,在弹出的对话框中全部勾选,并点击确定,同步完成后选择仿真-仿真设定-将路径添加到主队列,选择应用--确定;11.选择仿真录像,点击播放,开始仿真录像。
工程二:搬运机器人1.新建空工作站--导入机器人IRB4600--选择最大承重能力,选择建模-固体-圆柱体,添加两个圆柱体,半径为200mm,高度分别为60mm和500mm,把其中一个作为工具添加到法兰盘上,同时导入两个设备Euro pallet如下列图所示:2.右击物体或在左侧布局窗口中右击物体名称,在下拉菜单中选择设定颜色来更改颜色:3.根据布局创立机器人系统,细节与工程一相同,系统完全启动后,选择控制器-配置编辑器,在下拉菜单中选择I/O,在弹出窗口中新建Unit,细节如下列图所示;4.Unit新建完毕后,右击新建signal,新建do1和do2,细节如下列图所示:5.新建完毕后,重启控制器6.重启完毕后,选择仿真-配置-事件管理器-添加事件,细节如下列图所示:7.事件添加完成后,开始创立路径啊,依次示教,机器人到达指定位置时,右击插入逻辑指令,如下图:8.路径创立完成后,同步到VC,仿真设定,然后进行仿真录像工程三:叉车搬运1.翻开软件,新建空工作站,导入机器人模型IRB4600,选择最大承重能力,然后选择根本--导入几何体--浏览几何体--选择本地几何体--翻开,如下列图所示:2.利用平移和旋转指令,将不同几何体按下列图位置摆放整齐:3.创立一个300*300*70的方体分别作为tool,将其创立为工具,具体操作如下列图所示:4.设定tool的本地原点为它的中心点,如下列图所示:5.选中tool,点击创立工具,将tool创立为工具,具体操作如下:6.创立完成后将其安装在机器人法兰盘上,右击机器人选择显示机器人工作范围,可看到机器人最大到达距离,再次选择取消显示:4.创立四个200*200*200的方体分别作为Box1~Box4,设定为不同颜色,将Box2~Box4设为不可见5.布局结束,如下列图所示:,6.根据布局创立机器人系统,待系统启动完毕后,选择控制器--配置编辑器-新建Unit --新建signal,包括do1~do 15,如下列图所示:7.设置完成后,重启控制器,翻开事件管理器,添加所需事件,包括显示对象,附加对象,提取对象,移动对象四类事件,具体如下:显示对象具体设置如下:附加对象具体设置如下提取对象设置如下:移动对象设置如下:8.事件添加完成后,创立路径,分别将Box1,Box2,Box3,Box4移动到垛板上,并排列整齐,路径如下列图所示9.路径创立完成后,同步到VC :10.同步完成后进行仿真设定,按下列图顺序添加路径,之后进行仿真录像:。