矿井皮带运输动态智能报警系统关键技术研究
智能化技术对煤矿机电运输的影响
智能化技术对煤矿机电运输的影响摘要:在煤矿井下生产过程中,需要不断地运输设备、人员及材料。
矿井运输系统是煤矿井下对于生产而言最为关键的系统。
运输物体的性质不同,所采用的设备也不同。
煤矿重要的运输设备有矿井提升机、电机车、皮带输送机等。
在以往的生产中,由于各种原因,运输过程中经常会发生各种安全事故,严重影响了煤矿生产的效率和安全性。
随着人工智能时代的到来,煤矿开始进行智能化建设,煤矿机电运输设备也正在经历智能化改造。
关键字:智能化技术;机电运输;影响1智能矿山概述智能矿山是在现代煤矿智能化理念下,基于物联网、大数据、人工智能、机器人化装备等信息技术与现代矿山开发技术深入融合提出的一种新型模拟技术。
该技术利用革新信息技术实现矿山的全面感知,对照真实矿山结构和开采情况进行线上开采实验,最终实现矿井开采、挖掘、运通、生产及安全、生态等,事前、事中、事后全过程智能化的管理,是一种非常科学的智能化管理方法。
目前在我国各大企业内部已经搭建了基本完善的矿山管理平台,通过平台科学管理各种无人作业方式,如开采面无人作业、大型设备无人作业、危险场所无人作业、掘进面无人作业等,覆盖整个矿山,管理非常便捷和迅速,这一切都需要智慧机械人、智慧设备及智能化系统来实现。
2煤矿机电设备管理现状2.1存在机电设备维护不到位的安全隐患如今露天煤矿存量较少,现在煤矿开采多是地形复杂的井下煤炭开采。
煤矿开采过程中是机电设备发挥主要作用,机电设备是一个复杂的机电系统。
一方面,井下开采煤矿外部环境复杂,开采难度大,机电设备需长期在高湿的环境条件下工作,设备的性能和构成设备的金属材料都会受到不同程度的影响,在设备的运行中有可能被腐蚀或部件受损害;第二,煤矿企业为了追求利润最大化,存在机电设备长期工作而忽视机电设备维护的现象,没有重视机电设备维护保养;如果启用存在安全隐患的设备进行煤炭开采,设备的维护保养实施不到位,就会出现安全事故隐患。
2.2机电设备管理制度不完善“没有规矩不成方圆”,管理制度是企业发展到一定阶段,企业员工经过一段时间的工作实践总结出来的对企业员工的行为和设备操作有约束力的规范,这个规范有一定的原则、方法以及管理组织。
煤矿井下皮带输送机防爆巡检机器人研究
煤矿井下皮带输送机防爆巡检机器人研究发布时间:2023-05-05T01:47:00.851Z 来源:《中国科技信息》2023年1期第34卷作者:贺星亮[导读] 工业机器人在越来越多的工业中得到广泛应用,大大提高了相关领域的自动化和生产力。
贺星亮天地(常州)自动化股份有限公司江苏常州 213000摘要:工业机器人在越来越多的工业中得到广泛应用,大大提高了相关领域的自动化和生产力。
但是,在煤矿井下可燃气体空间等爆炸性环境中,它受到特殊使用条件和技术要求的限制,机器人技术的应用并不普遍。
它的主要技术限制涉及在传统工业环境中设计和开发的机器人,这些机器人通常不考虑爆炸环境中电气设备的点火能力或机械火灾引起的发动机部件的点火能力。
基于此,本文章对煤矿井下皮带输送机防爆巡检机器人研究进行探讨,以供相关从业人员参考。
关键词:煤矿井下;皮带输送机;防爆巡检机器人引言随着自动化、信息化技术的发展,多数煤矿井下设备已实现机械化和自动化控制,达到了远程监控、无人值守的效果,但设备日常巡检仍由人工完成,存在一定的安全隐患。
除安全因素外,人工巡检还存在巡检效率低、劳动强度大、检测效果不稳定等问题。
为解决上述问题,设计一套矿用巡检机器人系统,通过搭载的传感设备对井下设备、设施进行智能感知,从而替代人工巡检,减少煤矿井下作业人数。
一、矿井巡检机器人系统组成相机设备由高清相机和云组成,可通过捕捉故障恢复完整的三维全景,并构成机器人系统的基本组成部分。
驱动是一种驱动机器人运行和检测的驱动装置,包括驱动马达、橡胶轮胎、使机器人保持稳定的自动捐助者、使机器人在特定轨道上保持平衡的橡胶轮胎、自动编码器将数据转换为可识别、通信、传输的信号,并显示机器人在矿井中的轨迹。
电缆装置是在机器人行走时使电缆同步的装置。
运输设备是通过电缆传输机器人收集的数据;气体传感器是危险气体,例如气体浓度,在燃煤发电厂下发现并通过运输工具上传的一氧化碳;异物检测用于在机器人检测过程中检测可能导致不均匀行进的障碍物,并在检测到异物时自动停止。
智能化技术对煤矿机电运输的影响

智能化技术对煤矿机电运输的影响摘要:随着科学技术的进步和5G网络在工业领域的应用,供给侧能源革命也在加速推进,通过数字化、网络化、智能化的手段来改变煤炭开采技术和方式,大大提升了煤炭的开采效率和安全性。
尤其是在数字化发展的今天,智能化技术已成为煤矿机电运输中的关键性技术。
文章结合煤矿机电运输系统中智能化技术的作用,探析智能化技术对煤矿机电运输的影响,对加快煤矿企业的现代化发展具有重要意义。
关键词:智能化技术;煤矿机电运输;影响引言煤矿机电运输重点涵盖皮带输送机、转载机、无人智能化等运输方式。
随着社会经济的不断发展,煤矿机电运输效率和质量不仅制约煤矿生产过程,而且影响煤矿生产的安全性。
当前时期,不少煤矿企业都投入和应用无人智能化运输方式,然而,在无人智能运输上依旧面临不足之处,其中较多见的是忽视软件与控制系统,以及应用的输送设备存在较大的随意性。
因此,只有重视智能技术的应用,科学地选择煤矿机电运输设备和方式,高度关注软件设备的设计,才能实现煤矿机电运输的标准化、一体化、智能化。
1煤矿机电运输系统中智能化技术的推动作用①提升了供电的可靠性。
煤矿资源整合之后,基本淘汰了产能低、规模小、技术落后的小煤矿。
一座座有投资规模的,装备先进的大型矿井投入生产,随着开采的延伸,煤矿井下供电多采用中央变电所到采区变电所,再到用电地点的分级供电模式。
智能化供电系统实现了对供电数据的实时上传与监控,实时监测矿井各个变电所的运行参数和馈电开关的运行状态:监测各个变电所进线参数,如电流、电压、进线开关状态等;监测变压器参数,如温度、出线电流、电压等;监测各个高压开关的工作状态、电流等。
另外,智能化技术的应用减少了变电所因越级跳闸带来的设备损坏及隐患。
②提高了运输过程的稳定性和安全性。
在煤矿机电运行中运用智能化技术,最大的特点就是提升了运输的稳定性和安全性。
运用一些智能算法,能处理机电运输中遇到的更为复杂的情况,实现煤矿机电运输的无人化。
浅析矿山皮带运输机的PLC控制技术
浅析矿山皮带运输机的PLC控制技术摘要为满足大型矿井生产需要,运量大的重型输送机广泛应用于矿山生产领域,具备运量大、操作简单优势的矿山皮带运输机便属于其中代表,基于此,本文简单分析了PLC控制技术在矿山皮带运输机中的基本应用,并结合实例对PLC控制技术的具体应用开展了详细论述,希望论述内容能够为相关业内人士带来一定启发。
关键词矿山皮带运输机;PLC;控制技术1 PLC控制技术在矿山皮带运输机中的基本应用1.1 PLC的应用原理PLC全称为可编程逻辑控制器,其主要用于代替继电器实现逻辑控制,“顺序扫描,不断循环”则属于PLC的工作方式。
在PLC的运行过程中,CPU能够根据编制好的程序开展按地址号或指令步序号的周期性循环扫描,且每个扫描过程完成后还会进行采样状态和输出状态的刷新,输入采样、程序执行、输出刷新属于PLC每个扫描周期的必经环节[1]。
1.2 功能设置对于矿山皮带运输机的PLC控制技术来说,PLC控制技术的应用需以智能控制系统为载体,由此结合矿山皮带运输机、矿山生产实际进行功能设置,即可较好满足矿山生产需要,典型的功能设置如下所示:①控制功能。
对于矿山皮带运输机的PLC控制技术应用来说,控制功能属于PLC控制技术应用过程中必须实现的功能,其能够细分为手动控制和自动控制,而如果运行过程中矿山皮带运输机出现故障,PLC控制技术便能够自动停止其运行,并将皮带运输机的故障数据自动传输至控制中心,而在故障排除后,工作人员则可以通过电控装置上的起车按钮使皮带运输机回归正常运行,PLC控制技术也将由此继续保证运输的平稳性和安全性,皮带运输机运行状况信息的实时上传、控制中心的整体控制也能够得到有力支持。
②保护功能。
在PLC控制技术的应用中,矿山皮带运输机的保护可获得有力支持,这种保护主要体现在故障保护、温度保护、电流保护三个层面,其中故障保護下PLC控制技术可利用沿线设置的保护开关识别闭锁、跑偏等故障,同时传递故障地质和停机信号,问题的显示和处理可由此得到保障;温度保护需要结合PLC控制技术和热电阻装置检测,以此实现电机温度监控,PLC 技术便能够通过停车处理避免电机温度过高可能引发的安全事故出现;电流保护是为了避免电流过大导致电机烧毁问题出现,由此结合PLC控制技术和电流变送器,即可实现矿山皮带运输机电流信号的显示、监控,PLC控制技术在这一过程中将负责紧急停车处理[2]。
基于PLC控制系统的皮带运输机故障报警设计
0引言随着煤矿矿井规模的不断增大、矿山机械设备的不断改进,随着软件技术的飞速发展,集中控制、智能控制正在逐渐成为皮带运输机的发展方向,目前,皮带运输机的“无人值守”已成为可能。
然而,随着井下工作面长度的不断增大,皮带运输机作为煤矿井下运输系统的主要设备也随之加长,长距离的皮带运输常会出现皮带断裂、打滑、跑偏、撒料等故障,这些情况会导致减少皮带运输机寿命、破坏运输系统安全等,严重威胁运输系统稳定性。
因此,设计含有皮带运输机故障报警甚至故障定位功能PLC控制系统监控运输机工作状态,做到有故障早发现、早解决尤为必要。
1皮带运输机故障分析煤矿井下运输机一般都具有长度大、载重大的特点,动辄几百上千米,在繁重的生产过程中,故障在所难免,主要有皮带机跑偏、异常噪音、撒料、皮带打滑、皮带断裂、减速机断轴等,其主要特征及破坏程度如下:1)皮带跑偏。
皮带运输机的皮带正常以中轴对称的U型覆于底部支架滚轴上载重运行,当皮带中轴偏离支架中心,即为皮带跑偏。
皮带跑偏在皮带运输机故障中占有较大比例,主要表现为悬空于运输机支架上方、偏离运输机支架两侧等两种情形。
皮带跑偏一方面会造成大面积的撒料、堆积,增加不必要的人工成本;另一方面,长时间的跑偏使得皮带两侧受力不均,引起撕裂,严重缩短皮带正常使用寿命。
2)皮带运输机的撒料。
皮带运输机撒料原因也是多方面的,常见原因有两种。
一种是皮带悬空撒料;煤矿运输巷道底板并不一定是水平的,而是随着煤层走向而起伏,因此就造成了布置于其中的皮带运输机的起伏不平,在皮带运输机的低洼段,皮带运输机底座曲率半径小于皮带曲率半径时,皮带悬空,U型槽变平槽,煤炭撒落。
另一种情况便是皮带跑偏造成的撒料,皮带两侧一高一低,煤炭从低侧撒落,此时需要对皮带进行纠偏。
3)皮带打滑。
皮带打滑也是皮带运输机故障中较为常见的一种,表现为皮带与转轴无法同步转动,致使皮带与转轴之间形成剧烈滑动摩擦,不必要的磨损严重缩短了皮带运输机的使用寿命。
封闭式皮带运输智能监控系统技术要求
封闭式皮带运输智能监控系统技术要求封闭式皮带运输智能监控系统是一种用于监测和控制封闭式皮带运输过程的先进技术系统。
它可以实现对皮带运输中的温度、振动、拉力等参数进行实时监测,并提供故障预警和异常报警等功能,从而提高生产效率、保护设备安全。
以下是对封闭式皮带运输智能监控系统技术要求的详细介绍:1.实时监测:封闭式皮带运输智能监控系统应能够实时、准确地监测皮带运输过程中的各种参数,包括温度、振动、拉力、速度、状态等。
2.增强安全性:系统应具备安全防护功能,可以对皮带运输中的异常情况进行快速判断和处理,实时报警,并采取相应措施进行处理。
3.数据分析与处理:系统应能够对监测到的大量数据进行分析和处理,提供合理的判断和预测,以及优化的控制策略,支持运输设备的故障诊断和维护。
4.可远程监控:系统应支持远程监控功能,可以通过互联网或局域网实现对封闭式皮带运输过程的远程监控,方便操作人员进行实时观察和控制。
5.数据存储与管理:系统应具备良好的数据存储和管理功能,能够对监测到的数据进行有效存储、备份和查询,方便历史数据的分析和比对。
6.用户界面友好:系统的用户界面应简洁直观,易于操作和配置,操作人员可以方便地掌握系统的使用方法,并进行数据的查询和分析。
7.多传感器集成:系统应支持多种传感器的集成,可以同时监测多个参数,通过多参数的综合判断和分析,提高监控的准确性和可靠性。
8.故障诊断与报警:系统应具备故障诊断和故障报警功能,对于出现故障或预警事件,及时发出报警信号,并记录相关事件信息,便于事后分析和处理。
9.开放性与可扩展性:系统应具备较强的开放性和可扩展性,可以与其他控制系统进行数据交互和共享,方便进行工艺流程的优化和集成。
10.可靠性与稳定性:系统应具备良好的可靠性和稳定性,能够在恶劣的工作环境下正常运行,并保证数据的准确性和可靠性。
11.低能耗:系统应具备低能耗的特点,能够有效减少能源的消耗,提高系统的经济性和环境友好性。
矿山运输皮带PLC智能控制系统的研究与应用
2主 运输 皮 带智 能控 制 系统 的设 计
主运输皮带是现代化煤矿安全高效生产的主要运输设备 , 其运 行 隋况的稳定与否直接关系到煤矿的生产状况 。 本智能控制系统参 数设置准确 、 方便 , 人机界面友好 , 便于现场维护和使用。 当出现 打
滑、 跑偏 、 皮 带纵 向撕 裂 、 超速 、 低速 、 超温、 烟雾降等故障时, 该 系 统 可根据故 障类型进行相应 的保护动作 , 对故 障进行记忆和显示 , 同 时发 出语言故 障报警信号 , 对集控 的多 台保护装置进行通讯 , 便于 维护人员进行及 时处理 。 主运输皮带智能控制系统 由检测装置 、 通
计一般 要求 。 控制器的各个功能在软件上的实现与衔接也是按照模 块 化 的原 则 完 成 的 , 程 序 结 构清 晰便 于 的 现 场 调 试 。 程 序 主 要 由 以 下几个部分 组成 : ( 1 ) 主程序 : 它主要完成对各个模块 的调用和系统参数 的上 电 初始化。 ( 2 ) 系统故障检 测与处理部分 : 实时检测系统运行过程 中出 现的各种故障 , 并处理 这些信息发 出相应的控制信号 。 ( 3 ) 控制算法 实现子程序 : 利用P L C 实现模糊控制算法 , 主要包括 电机 电流误 差 及误差变化率计算 , 查寻模糊控制规则表等。 ( 4 ) 数据转换部分 : P L C 将采集到的模拟信号通常是转换成数字信号进行处理 的, 为了便于 观察 和参 数设 置需要将这些数字量转换成实 际工程 中物理量 。 ( 5 ) 通讯程序 部分 : 它 包 括 与 触 摸 屏 的通 信 和 上 位 机 通 信 两 个 部 分 。 3 . 2主 运输 皮 带监控 系统 组 态要 求 ( 1 ) 监视功 能不论 系统处于哪种工作方式下 , 系统具有对设备 的状态和参数进行实时监测的功能。 组态软件将采集的数据记录在 实时数据库 中, 并把数据的变化用动画的方式形象 的表示出来 , 同 时完成变量报警 、 操作记录 、 趋 势曲线、 数据查 询等 功能。 监测信 号 的设置是根据系统控制需要 、 保护设备安全需要及历史数据查询需 要系统主要显示状态及参数有 : 运行方式显示、 电机状态显示 、 工频 与变频显示 、 变频器输 出频率显示 、 皮带线速度显示 、 各 种报警信号 显示等 。 ( 2 ) 控制功能 。 上位机通过和P L C 实现 数 据 交 换 实 现 上 位 机 的控制功能。 当控制方式发生变化时 , 系统 自动运行于相应的状态, 系统设置了手动和 自动切换功能, 同时在上位机上还可 以实现系统 参数 的设置 , 系统启动和停止等功能。 ( 3 ) 通信功能 。 P L C 作为终端控 制设备 , 对现场 的大量数据进行处理和运算 , 并执行相应 的程序。 井 下P LC 与上位机利用井下 以太 网进行通讯 , 将处理的结果及现场检 测传送 ̄ U P L C的信号传送 至上位机 , 在上位机上完成监控 画面、 参 数查询、 曲线显示 、 报警处理等功能, 使系统值班人员及管理者能实 时掌握系统工作状态。 ( 4 ) 报警功 能。 系统必须对所有的故障信号进 行声光报警 以提醒值班人员 , 并根据故 障情况进行相应的控制。 如 变频器故障时 , 系统切换至全工频运行 , 某台电动机故障时, 系统切 除该 台电动机 , 启动其它的 电动 机。 发生皮带 跑偏撕裂等情况时系
煤矿井下智能化运输系统的研究与应用

煤矿井下智能化运输系统的研究与应用随着现代工业的快速发展,煤矿产业作为能源的重要来源,在国民经济中扮演着举足轻重的角色。
然而,由于煤矿井下作业环境的恶劣和危险性,矿工们的生命安全和劳动强度一直是亟待解决的问题。
为了提高煤矿井下的工作效率和保障矿工的安全,煤矿井下智能化运输系统的研究与应用成为矿业科技领域的热点。
一、智能化运输系统的概述煤矿井下智能化运输系统是指利用先进的计算机技术和自动化控制技术,对煤矿井下的矿石、物料等进行智能化运输和管理的系统。
该系统通过传感器、通信设备和信息处理系统,实现对井下矿石、物料的实时监测、控制和调度,提高运输效率,并降低事故发生的风险。
二、智能化运输系统在煤矿井下的应用1. 自动运输车辆智能化运输系统中的自动运输车辆是其中重要的组成部分。
这些车辆通过激光导航、视觉感知和无线通信等技术,实现在井下道路上自主行驶和物料运输。
相较于传统的人工驾驶方式,自动运输车辆不仅提高了运输的效率,还减少了矿工的劳动强度和安全风险。
2. 智能化运输控制中心煤矿井下智能化运输系统需要有一个运输控制中心来进行整个系统的监控和管理。
该控制中心通过实时接收和处理井下传感器的数据,控制和调度自动运输车辆的行驶路线和速度,确保煤矿井下物料的安全运输。
3. 人工智能技术应用在煤矿井下智能化运输系统中,人工智能技术的应用也起到了重要的作用。
通过对运输车辆和设备进行数据分析和学习,可以实现对煤矿运输过程的优化和智能化。
例如,通过预测矿石和物料的需求量和运输路径,智能化系统可以自动调度和分配运输任务,提高运输效率。
三、煤矿井下智能化运输系统的优势与挑战1. 优势:(1) 提高工作效率:智能化运输系统可以实现对井下矿石、物料的实时监测和调度,避免了传统人工调度的局限性,提高了作业效率。
(2) 降低劳动强度:自动运输车辆的应用减轻了矿工的体力劳动,降低了作业强度和劳动风险。
(3) 提升安全性:智能化系统通过实时监测和控制井下环境和设备状态,可以提前预警和避免事故发生,保障矿工的生命安全。
《2024年智慧煤矿与智能化开采关键核心技术分析》范文
《智慧煤矿与智能化开采关键核心技术分析》篇一一、引言随着科技的快速发展和社会的持续进步,智慧煤矿与智能化开采成为了煤矿产业发展的重要方向。
本文将详细分析智慧煤矿的核心技术,并深入探讨智能化开采的关键技术,旨在为推动煤矿产业的转型升级提供参考和借鉴。
二、智慧煤矿的核心技术1. 物联网技术物联网技术是实现智慧煤矿的基础。
通过将传感器、网络通信、云计算等技术应用于煤矿生产过程中,实现对煤矿生产环境的实时监测、数据采集和传输。
物联网技术能够实时掌握矿井内的各种信息,如瓦斯浓度、风速、温度等,从而及时发现潜在的安全隐患。
2. 大数据分析与挖掘技术大数据是智慧煤矿建设的重要资源。
通过对生产过程中产生的各种数据进行收集、分析和挖掘,可以获取有价值的信息,如设备运行状态、煤炭产量、安全生产状况等。
这些数据能够帮助企业进行决策分析、优化生产流程、提高生产效率。
3. 云计算与边缘计算技术云计算与边缘计算技术为智慧煤矿提供了强大的计算能力和数据处理能力。
通过云计算,可以实现数据的集中存储和共享,提高数据利用率。
而边缘计算则能够在矿井现场进行实时数据处理和分析,提高响应速度和决策效率。
三、智能化开采的关键技术1. 自动化采煤技术自动化采煤技术是实现智能化开采的基础。
通过引入先进的自动化设备和控制系统,实现采煤过程的自动化、智能化和无人化。
这不仅可以提高采煤效率,还能降低工人的劳动强度和安全风险。
2. 智能装备与机器人技术智能装备与机器人技术是智能化开采的重要手段。
通过引入智能化的采煤机、挖掘机等设备,实现设备的自动化控制和智能调度。
同时,利用机器人技术进行矿井巡检、危险区域作业等任务,提高作业效率和安全性。
3. 智能感知与识别技术智能感知与识别技术是实现智能化开采的关键。
通过引入高精度的传感器、图像识别等技术,实现对矿井环境的实时感知和识别。
这有助于及时发现潜在的安全隐患,提高生产效率和安全性。
四、结论智慧煤矿与智能化开采是煤矿产业发展的重要方向。
矿井如何提升智能化建设,确保可持续健康发展的研究及应用
矿井如何提升智能化建设,确保可持续健康发展的研究及应用摘要:近年来煤矿安全生产的高压态势较为严峻,安全管理难度大。
坚持“以人为本,安全第一”的原则,为提高综合机械化的高效产能,加快智能化煤矿建设,提高矿井智能化水平。
要想推进智能化矿井建设,矿井必须结合实际情况对采掘部署优化、井下运输系统、供电系统、排水系统改造升级等。
从而达到减员提效的目的,同时也需要克服复杂的地质条件,尤其是急倾斜软底工作面,转变思想、接受新工艺、新设备。
关键词:提高;加快;推进;智能化;急倾斜软底;新工艺;新设备1概述1.1矿井概况四川川煤华荣能源有限责任公司铁山南煤矿属国有重点煤矿,矿井于1968年由华蓥山工程处(原川煤十三处)开始建设,矿井于1977年建成投产,年设计生产能力21万吨,服务年限60年。
1985年达产,2019年核定矿井生产能力为60万吨/年。
1.2工程概况铁山南煤矿随着矿井的深部开采,煤层倾角发生变化。
我矿以往接触的煤层倾角一般在40°以下,而今-112采区、-121采区工作面平均倾角在50°以上,最大倾角达到70°以上。
过去只能采用柔性掩护支架开采,但是劳动强度大、单产水平低、安全系数也不高,不利于矿井可持续发展。
为了保证矿井安全生产、高质量发展,综合机械化采煤技术的提高,矿井智能化的推进已成为矿井可持续发展的必要趋势。
因此必须对井下采煤工作面综合机械化开采技术(开采工艺、采煤机、支架、运输设备等选型)、井下运煤矸系统、井下供电系统、井下排水系统、远程数据监测系统进行优化、升级。
运用先进的测控、信息和通信技术,对矿井安全生产和经营管理信息进行采集、分析和处理,实现协同运行并提供决策支持的矿井。
2采煤综合机械化技术优化2.1地理位置铁山南煤矿-1212K21工作面位于东翼-100m水平-121采区K21煤层的第一个工作面,南以F3断层下盘为界,北以-121采区下山为界,上接-1116K21工作面采空区,下止工作面机巷。
矿井胶带运输机集控与远程监控系统应用研究

矿井胶带运输机集控与远程监控系统应用研究摘要:通过矿井胶带输送机集控及远程监控原理的详细解译,实例分析了该系统应用于祁南煤矿主运皮带机的安全与经济效益。
结果表明:该监控系统各指标均达设计要求,可实现联网同步与多台集中控制;其中的远程监控技术及巡视功能,尤以技术新颖、操控简便、人机交互的特点为使用单位所普遍推崇。
实践证明该系统科学合理,技术含量高,动作可靠,功能齐全,安装方便。
因此在强力皮带机控制系统中具有更为广阔的应用前景。
关键词:煤矿胶带运输机集控远程监控1 引言煤炭是我国主要能源,在国民经济发展中占据重要位置,随着煤炭行业不断向着高产、高效、集约化方向的发展,生产设备越来越趋向大型化、先进化,然而与生产紧密相联的皮带运输监测和控制技术却并未随之相应提升。
因而改变落后的生产工艺和技术装备势在必行。
众所周知,煤矿生产效率的全面提高须借助皮带机监测和控制技术。
皮带运输监测和控制系统的技术提升或产业升级,有助推进煤矿信息化发展。
一方面矿井生产集约化程度越高,便要求生产设备工作越稳定可靠,即要求对设备工况的监测和控制的反应越实时、准确、快速;另一方面煤矿信息化程度的提升,亦会促进皮带运输监测和控制系统的发展。
近些年,煤矿皮带运输控制技术整体仍停滞于功能单一、技术落后的几种传统控制方式上。
国内虽出现多种集控产品,但弊端颇多:操作员须守于现场对皮带机的运行进行简单重复操作与巡查,而此期间却对皮带机中间或机尾段可能发生的意外事故一无所知,从而隐伏重大安全隐患。
伴随我国信息化进程的全面启动,煤炭行业电子技术自动化、网络化得以飞速发展,使得煤矿皮带运输远程监控成为可能。
煤矿胶带运输机集控系统运行安全可靠与否直接影响矿井的经济效益,因而提高系统的可靠性与安全性、实施集中监控、实现系统的综合保护显然十分必要。
2 系统控制原理该控制系统分别由地面部分、井下部分和宽带传输平台组成,其中地面部分由综合监控软件、网络终端、图形工作站、工控机等构成;井下部分根据控制需要由多功能操作台、控制箱、各种传感器和磁力起动器组成;传输平台主要由信息传输交换装置、矿用阻燃光缆、矿用阻燃通讯电缆、接线盒等组成,见图1。
主斜井皮带运输系统智能化改造方案设计与实践朱文龙张维事张永彪
主斜井皮带运输系统智能化改造方案设计与实践朱文龙张维事张永彪发布时间:2023-05-05T02:10:27.858Z 来源:《科技新时代》2023年4期作者:朱文龙张维事张永彪[导读] 内蒙古白音华海州露天煤矿有限公司井工矿主斜井皮带系统担负着矿井原煤生产运输任务,多年使用过程中存在着能耗高、故障率高、运行费用高等诸多问题,为了满足矿井扩增产能需要,彻底解决实际问题和安全隐患,白音华公司进行了方案论证、设计和现场施工,成功完成了变频智能控制、永磁电动机直接驱动、系统简化和装备升级等系列技术改造,经过7个月的平稳运行和生产实践,此次改造完全达到了预期效果。
阜矿集团白音华海州露天煤矿有限公司内蒙古锡林郭勒盟西乌珠穆沁旗 026200摘要:内蒙古白音华海州露天煤矿有限公司井工矿主斜井皮带系统担负着矿井原煤生产运输任务,多年使用过程中存在着能耗高、故障率高、运行费用高等诸多问题,为了满足矿井扩增产能需要,彻底解决实际问题和安全隐患,白音华公司进行了方案论证、设计和现场施工,成功完成了变频智能控制、永磁电动机直接驱动、系统简化和装备升级等系列技术改造,经过7个月的平稳运行和生产实践,此次改造完全达到了预期效果。
关键词:皮带系统变频智能永磁电机方案设计实践1 主井原煤运输系统现状内蒙古白音华海州露天煤矿有限公司位于内蒙古自治区锡林郭勒盟西乌珠穆沁旗白音华镇东北约35km处,井工矿煤炭生产能力500万吨/年,核增产能后为800万吨/年,主井原煤运输系统使用四部DSJ140/260型胶带输送机,采用电动机、联轴器、减速机联接主滚筒的传统方式驱动,未设计安装变频启动或软启动装置,采用3300V高压电磁起动器直接启动,带宽1400mm,带速4.5 m/s,主动滚筒直径Φ1030mm,机尾滚筒直径Φ630mm,卸载滚筒直径Φ1025mm。
四部皮带机共计安装400kW异步电动机31台,总装机功率12400kW。
2 主井原煤运输系统存在问题及改造原因白音华井工矿主井原煤运输系统自2011年投入使用以来一直存在电耗高、设备占用多、维护费用大、故障率高等实际问题,具体如下:2.1 电耗高,不符合能耗“双控”要求。
煤矿皮带巷道火灾预警及自动灭火系统技术应用

煤矿皮带巷道火灾预警及自动灭火系统技术应用摘要:带式输送机是煤矿生产中的一种主要运输设备,广泛应用在采区上下山、运输大巷及地面运输走廊等场所。
带式运输机一旦发生事故,将严重影响煤矿安全生产,造成重大经济损失。
因而如何避免事故的发生,保证带式运输机安全、可靠、高效运行,是一项重要的工作。
关键词:自动灭火;预警;胶带运输机一、自动灭火系统简介煤矿区域火灾预警及自动灭火系统,全面解决了煤矿自动灭火安全智能化的问题。
该系统由地面工作站(含监控软件)、控制主机、光纤测温主机、火焰传感器、烟雾传感器、语音声光报警器、疏散指示灯、干粉灭火装置、气体灭火装置等设备组成,涵盖了火灾探测预警报警系统、光纤测温系统、自动灭火系统、安全疏散系统的功能。
通过监测监控软件,能够在调度室全面掌控全矿井的灭火设备运行状况、查询报警信息,也可以无缝融入煤矿智能化监控系统、智慧矿山管控平台等,真正为煤矿实现了自动灭火系统智能化,解决了智慧矿山无法覆盖自动灭火领域的问题。
该系统通过全线温度实时监测在火灾发生前发出预警,也可以在火灾发生的初期阶段及时检测到火焰或烟雾信号,并控制自动灭火装置将火源扑灭,防止由此引发的更大范围更严重火灾事故。
系统可根据保护范围内可能会产生的不同火灾类型配置不同的火灾探测器和灭火设备,可扑救机械、电气、化学火灾。
灭火装置使用的干粉、七氟丙烷均对设备及环境无腐蚀无污染,能够快速扑灭防护区域内的火源。
自动灭火系统示意图二、装置特点及优势1.联动融合:自动灭火系统与巡检机器人无缝融合,实现无盲区无死角可视化监测,发生报警时,两者相互联动控制,消除隐患,杜绝事故发生。
2.智慧灭火:通过配套的自动灭火管理系统,可实现智慧消防、远程管控;3.自动控制:探测、报警、疏散指示、灭火全自动执行;4.功能齐全:一套设备完成预警报警、自动灭火、安全疏散的系统功能;融合巡检机器人,可从声、光、热、气、烟五个方面进行全方位监控。
5.配置灵活:根据不同环境和灭火需求,可选择不同的传感器搭配方式和灭火介质;6.运行稳定:主机采用大规模自动控制系统使用的可编程控制器方案,保障大规模数据采集、自动控制系统稳定可靠地长期运行;7.安全可靠:同时满足国家防爆标准、煤矿安全规程、消防行业规范的要求;8.火警确认后延时启动灭火装置,为现场人员留有足够的撤离时间。
煤矿井下主运输皮带自动化系统方案--资料

煤矿井下皮带自动化控制系统方案设计第一章功能一、系统基本功能控制功能该系统既可从井上调度室对井下皮带运输进行实时监控,也可从井下操作台、触摸屏、就地分站箱对皮带运输进行实时监控。
既可对一条皮带、一条生产线实现一键起停(顺煤流停、逆煤流开),也可对多条生产线的整个系统实现一键起停。
在自动状态下每条皮带还可实现有煤即开、无煤即停的全自动控制。
集成功能该系统能将同种组态软件和具有相同通讯功能的不同软件下的不同系统集成到一个计算机上进行监控。
使整个煤炭体系更直观更易于管理。
第二章系统硬件组成及工作原理一、系统硬件组成本系统是以矿用本质安全型PLC为核心的皮带机综保装置组成下皮带机控制系统,是以光纤为介质组成的工业以太网传输网络。
整个系统现场控制设备:矿用隔爆兼本质安全型PLC(含语音模块、通讯模块)、检测传感器(物流传感器、煤位传感器、速度传感器、跑偏传感器、撕裂传感器、温度传感器、烟雾传感器)、KPZ型矿用转载点自动喷雾装置、本安型操作台、隔爆兼本安型就地操作控制箱、嵌入式触摸计算机(Windons CE操作系统)、网络交换机、和井上监控中心的上位机监控软件等组成。
二. 系统硬件的工作原理1、矿用本质安全型PLC该产品拥有多项专利技术,性能达到煤矿级与军工级要求,PLC模块具有矿用本质安全特性(经过严格测试,已通过“本安”认证,防爆证号:1094029U),是一种适用于地面严酷环境或煤矿井下有瓦斯和煤尘爆炸危险环境使用而不需要采用隔爆措施的通用型PLC,技术处于国内领先水平。
IB 系列PLC 采用模块化设计,扩展方便,功能强大;其DI/DO 点数可扩展至80 点;具有脉冲频率测量、脉冲周期测量、脉冲宽度测量功能;PWM 高速输出、频率型模拟量采集、语音信息报警、输入断线判断等多种模块;通讯为标准的MODBUS-RTU 或MODBUS TCP 通讯协议、物理接口为RS-232、RS-485、CAN 或以太网,通讯距离远、网络节点多、抗干扰能力强。
矿井胶带运输机智能巡检系统技术应用
矿井胶带运输机智能巡检系统技术应用发布时间:2021-09-28T03:18:21.245Z 来源:《工程管理前沿》2021年15期作者:李华李莉林[导读] 煤矿原煤运输系统是矿山领域公用辅助系统,具有设备多、传输距离长、运行方式复杂李华李莉林川煤集团华荣能源公司大宝顶煤矿,四川省攀枝花,617017摘要:煤矿原煤运输系统是矿山领域公用辅助系统,具有设备多、传输距离长、运行方式复杂、运行环境恶劣、故障因素多,极易发生事故。
由于传输物料的物理特性,容易造成输送带卡阻、跑偏、撕裂、堆料甚至输送带断裂的情况,严重影响运输系统的运行效率以及生产安全性。
对煤矿原煤运输系统进行实时监控,防止传输故障是生产效率、降低生产成本的必要手段。
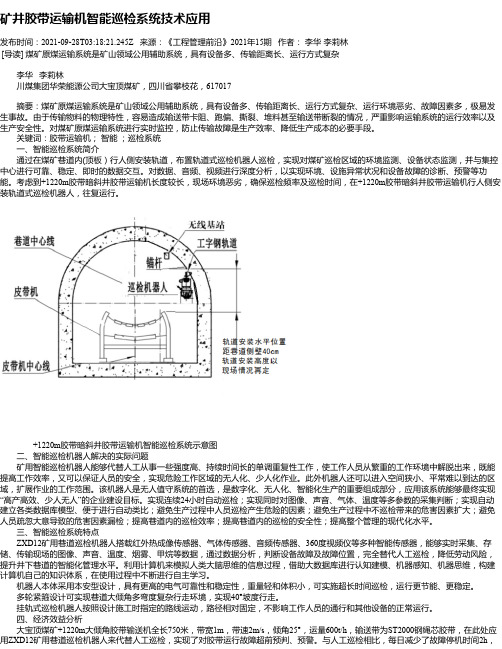
关键词:胶带运输机;智能;巡检系统一、智能巡检系统简介通过在煤矿巷道内(顶板)行人侧安装轨道,布置轨道式巡检机器人巡检,实现对煤矿巡检区域的环境监测、设备状态监测,并与集控中心进行可靠、稳定、即时的数据交互。
对数据、音频、视频进行深度分析,以实现环境、设施异常状况和设备故障的诊断、预警等功能。
考虑到+1220m胶带暗斜井胶带运输机长度较长,现场环境恶劣,确保巡检频率及巡检时间,在+1220m胶带暗斜井胶带运输机行人侧安装轨道式巡检机器人,往复运行。
+1220m胶带暗斜井胶带运输机智能巡检系统示意图二、智能巡检机器人解决的实际问题矿用智能巡检机器人能够代替人工从事一些强度高、持续时间长的单调重复性工作,使工作人员从繁重的工作环境中解脱出来,既能提高工作效率,又可以保证人员的安全,实现危险工作区域的无人化、少人化作业。
此外机器人还可以进入空间狭小、平常难以到达的区域,扩展作业的工作范围。
该机器人是无人值守系统的首选,是数字化、无人化、智能化生产的重要组成部分,应用该系统能够最终实现“高产高效、少人无人”的企业建设目标。
实现连续24小时自动巡检;实现同时对图像、声音、气体、温度等多参数的采集判断;实现自动建立各类数据库模型、便于进行自动类比;避免生产过程中人员巡检产生危险的因素;避免生产过程中不巡检带来的危害因素扩大;避免人员疏忽大意导致的危害因素漏检;提高巷道内的巡检效率;提高巷道内的巡检的安全性;提高整个管理的现代化水平。
智能化技术对煤矿机电运输系统优化提升的作用
智能化技术对煤矿机电运输系统优化提升的作用安徽省淮北市 235131摘要:随着5 G网络技术的发展,能源供给侧的变革正在加快。
通过数字化、网络化和智能化改造煤炭开采技术和方法,开采效率和安全得到了明显改善。
在煤炭开采、智能自动控制技术和机电运输煤炭方面,智能科技的应用和推广仍在不断地探索和进步,在部署智能科技作用机电运输煤方面,显得尤其重要。
智能分析技术的应用在机械和电力输送,让煤矿机电运输系统智能化有更深的理解。
关键词:煤矿智能化;机电运输系统;智能化技术引言为了加速我国煤炭工业的现代化进程,推进智能化进程,使我国的煤炭工业由传统的劳力密集型向技术型的转型。
智能化技术的运用,不但可以有效地提高煤矿的生产效率,还可以极大地改善煤矿井下的生产环境,使煤矿井下的机电设备能够更好地进行在线监测。
一、智能化技术在煤矿机电运输中的应用分析随着市场需求的改变,以及人们对环保的要求,在煤炭市场上的竞争越来越激烈,各个矿业企业都要提高煤的产量、质量,同时,消费者也希望环保煤的指标得到持续的改善。
采取更加智能化的采运方式,从而提高煤炭生产的效率。
(一)在矿井提升机中的应用在矿井中,物料,设备和人员都由提升机实现井下到地面的运输。
由于地下升降机的起停频率较高,所以需要对升降机的速度进行适当的控制。
底层升降机安装了智能化的控制系统。
升降机的起停易于准确控制。
该智能控制系统由微电脑控制器、感应器、摄像机及智能演算法等组成。
相对于自动化的升降机,智能化的升降机更侧重于操作的方便性。
利用该系统的软件接口,操作者可以方便地了解井下起重机的实际工作情况。
对吊装装置的搬运过程进行了虚拟图像图像的展示。
(二)在供电系统中的应用智能型变电站配变开关具备超限触发,远端断开,无监视等特点。
监测站是一种智能终端机,也是一种在地下变电所中起到保护作用的保护装置。
所述站点地面监测中心智能终端的保护装置的电参数被传送到所述地面监测中心,并且通过所述控制器将所述控制装置数据被保护。
自动化控制在煤矿井下皮带运输系统中的应用

自动化控制在煤矿井下皮带运输系统中的应用摘要:煤矿生产制造大多在井下进行,施工的自然环境相对恶劣。
为了保证矿井建设的顺利进行,提高矿井建设的生产率和安全性,有必要不断完善煤矿胶带运输系统。
这种运输方式在实践中方便快捷,可以进行连续运输,覆盖范围广。
然而,在实际应用中,皮带运输系统在长期满负荷运行下极易出现异常,给煤矿生产制造增加了一定的安全隐患。
基于此,我们应充分利用现代科学技术的作用,将自动技术控制系统应用于煤矿胶带运输系统,以提高胶带运输系统的运行安全性,保证运输的高效性。
关键词:自动化控制;煤矿井下;皮带运输系统;应用1皮带自动化控制系统的组成和特点皮带机械自动化系统的组成包括两个方面:一是保护装置。
关键是要具备一些基本功能,以避免煤炭运输过程中的方向偏差,或偏差和煤炭堆放。
目前,保护装置在安全方面的作用需要进一步提高,其操作灵敏度需要进一步提高。
在此基础上,不断提高保护装置的技术实力,实施有效维护;另一个是皮带输送机。
这一部分是皮带运输设备的重要组成部分,其技术强度将直接影响煤矿井下生产能力,需要引起重视。
现阶段,各种不同类型的制动装置和软启动已经开发出来。
其运行相对稳定,能耗水平相对较低。
他们有多种驾驶模式,可以根据计划进行选择。
皮带机械自动化系统的特点:一是系统的运行成本不太高。
选择了远程控制配电方式,不需要太多的发电机组接线,也不容易降低成本和效率,这在一定程度上降低了系统的运行成本。
此外,皮带自动化技术的自动控制系统还具有常见故障识别水平,能够尽快发现系统中的常见故障,并通过自校正和自检及时处理,从而降低中后期的维护成本;其次,它使用完全分布式的体系结构。
它不仅可以完成矿山生产的有效管理,还可以为路面工作提供帮助。
设备主机和电话分机之间有一定的连接,但不会相互影响。
如果某台电机发生安全事故,其他发电机组仍能保持正常运行;三是机械自动化水平较高。
在系统运行中,操作员可以实时监控系统,立即接收和处理信息,并控制每个设备的运行。
自动化控制在煤矿井下皮带运输系统中的应用
自动化控制在煤矿井下皮带运输系统中的应用摘要:随着社会的发展,人们对煤矿资源需求的日益增多增多。
煤矿井下皮带运输系统是整个煤矿生产过程中的重要能耗环节,直接关系到煤矿生产效益,进而影响企业竞争力。
所以要将减少消耗的能源量、降低支出的能源成本作为目标,对煤矿井下皮带运输系统进行优化,将自动化控制系统应用其中。
通过结合现代信息技术,可以保证煤矿井下皮带自动化控制系统顺利作业,实现生产效益。
本文就自动化控制在煤矿井下皮带运输系统中的应用展开探讨。
关键词:煤矿自动化控制皮带运输系统引言煤炭资源是当前社会应用的重要能源之一,对推动后续各项工作顺利开展具有重要意义,但是当前煤矿生产效率与其预期之间仍存在一定的差异,煤炭运输过程中经常容易出现故障,影响其后续各项工作合理开展,为了降低该类问题造成的影响,相关单位必须加强重视,采取合理方法来提高皮带运输效率。
1煤矿皮带自动化控制系统的构成和技术参数煤矿井下皮带自动化控制系统主要包括硬件和软件系统两部分。
其中硬件系统主要包括主站、分站、显示器、控制器、磁力启动器、传输电缆等组成部件;软件系统是处理信息的系统。
控制器是整个控制系统中的重要组成部分,在控制系统每条皮带上都配置有可编程控制箱,总控制台根据实时分站机组实现监控功能。
尽管种类很多,但以PLC编程控制器运用最为广泛,该控制器以组成数据为传输网络来实现规模功能的管理,通过获取采集机组的作业情况来设置控制器,实现信息的有效传递。
不同的控制系统,装配和检测装置不同。
操作者通过显示器可以掌握系统工况、皮带参数及运行、装置运行、故障信息等信息,该控制技术的参数主要包括额定输入电压、直流工作电压、工控屏工作电压、声光语音箱工作电压、传输信号的方式和速率、输入和输出信号等,这些都是主要的系统设备的参数,应该根据实际生产情况来确定。
2井下皮带运输自动化控制系统的特点(1)利用计算机和多种传感器组成的工况检测以及控制系统,连续监控保护设备的各部分工况参数,同时所有的相关参数应由显示控件来显示。
煤矿皮带机常见故障与智能监测监控研究
环境工程2019·0484Chenmical Intermediate当代化工研究技术应用与研究煤矿皮带机常见故障与智能监测监控研究*史增荣(汾西矿业集团新产业发展有限责任公司 山西 032000)摘要:针对煤矿皮带机常见故障和监测监控系统进行分析,首先介绍了常见故障发生原因,然后结合这些故障探讨了解决方法,内容主要有:皮带打滑、皮带跑偏、撤料故障、异常噪音。
最后探讨了皮带输送机故障智能检测监控系统的设计和应用。
希望通过对这些内容的分析,能够在一定程度上减少煤矿皮带机故障发生率。
关键词:煤矿皮带机;常见故障;智能监控;物理反应中图分类号:T 文献标识码:AResearch on Common Faults and Intelligent Monitoring of Coal Mine Belt ConveyorShi Zengrong(Fenxi Mining Group New Industry Development CO., LTD., Shanxi, 032000)Abstract :Based on the analysis of the common faults and monitoring system of coal mine belt conveyor, this paper first introduces the causesof common faults, and then discusses the solutions to these faults, including belt slipping, belt deviation, material withdrawal fault and abnormal noise. Finally, the design and application of intelligent fault detection and monitoring system for belt conveyor is discussed. It is hoped that through the analysis of these contents, the failure rate of coal mine belt conveyor can be reduced to a certain extent.Key words :coal mine belt conveyor ;common faults ;intelligent monitoring ;physical response煤矿在具体运输过程中,需要应用皮带机,借助皮带机能够将矿井中的岩石和煤炭等运送到指定位置。
矿井皮带运输状态监测与事故预警系统
矿井皮带运输状态监测与事故预警系统
卢玉强
【期刊名称】《科技与企业》
【年(卷),期】2011(000)012
【摘要】运用测试技术和控制理论建立完善的矿井皮带运输状态监测与事故预警
系统。
本系统能对皮带运输机出现的过载、打滑、划伤、断带、联轴器断开、跑偏、烟雾、温度等故障,进行自动检测及声光报警。
同时本系统与语音广播系统、视频监控系统一起,构成一个完整的操作、调度、监视网络,实现对整个系统的遥测、遥信、遥视和遥控。
【总页数】1页(P79-79)
【作者】卢玉强
【作者单位】青岛科技大学自动化学院山东青岛
【正文语种】中文
【中图分类】TP277
【相关文献】
1.矿井皮带运输状态监测与事故预警系统 [J], 卢玉强
2.煤矿井下皮带运输状态监测系统研究 [J], 赵凤宇
3.井下皮带运输机监测与预警系统研究 [J], 崔志强
4.皮带运输机监控与预警系统研究 [J], 王国利
5.矿井皮带运输机运行状态监测与保护系统设计 [J], 郭涛
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿井皮带运输动态智能报警系统关键技术研究
摘要:煤矿井下皮带皮带机安全、高效循环运行依赖两条主线有效控制完成,
皮带智能监测系统的完善,可以帮助设备运行人员更好的操作设备,现有皮带运
输技术缺少多方面的监测环节。
本文提出了一种基于CAN总线的皮带机的智能报
警系统的组网设计。
以现场总线技术为基础,处理器为核心的智能组网设计,与
一般的组网设计相比具有明显的优点,有着广泛的应用前景。
关键词:煤矿;CAN总线;智能报警;皮带机
引言
皮带机智能报警系统(组网设计),是一个下位机模块。
系统以AT89S52为核心,基于CAN总线智能报警系统的组网设计,由键盘显示与报警电路、网络传输
模块组成。
系统利用键盘显示电路模拟网络地址,当被监测点数据异常,系统将
报警信号传输到操作室同时发出进行报警信号;网络选用CAN现场总线,可以接
收主站发送过来的命令,根据不同的命令,系统会做出相应的处理。
本文主要是研制出一套适用与矿用胶带运输机的信息监测的装置。
系统所实
现的功能是实时采集胶带机监测点数据并存储、显示、传输、报警与处置,因此
主要内容如下:矿用大型胶带机报警系统的硬件部分由数据采集模块、微控制器
模块、通信模块、报警电路模块,键盘显示模块、电源模块组成。
利用Altium进
行电路原理图及印刷电路板的设计。
1皮带机智能报警系统的现状及CAN现场总线
目前,国外己有许多煤矿开采胶带机运输都己开始采用CAN总线来实现皮
带机内部控制系统与各检测和执行机构间的数据通信。
[1]CAN总线技术在我
国的应用起步比较晚,2000年开始皮带机监测系统才被引入大型矿井皮带机监测
机制中,2008年现代化大型矿井的建设,该项技术得以发展推广。
现场总线是用
于过程自动化,将智能化现场设备与高层设备之间互联,实现全数字、串行、双
向传输的通信系统。
现场总线主要有以下几种类型:基金会现场总线(FF)、LonWorks、ProfiBus、CAN、HART,而其中CAN即控制器局域网因为具有高性能、高可靠性以及独特的设计而越来越受到关注。
2系统结构设计
2.1系统结构
其基于CAN总线的皮带机智能报警系统总体结构图2.1所示。
图2.1基于CAN总线皮带机报警系统总体结构图
其中皮带机智能报警系统的组网硬件电路分为5大模块:电源模块、CAN总
线控制模块、显示模块、报警模块、单片机控制电路模块。
2.2系统开发的软件和硬件平台
硬件平台用两个单片机最小系统的开发板,两个CAN通信模块搭建整个组
网的模拟平台,以一个单片机开发系统的键盘模拟报警信号的输入信号,以便满
足软件的调试,在硬件电路设计好以后,软件设计则是最重要的一个设计部分,CAN总线所实现的智能化、集约化功能都是由软件来完成的。
软件开发环境:微处理器AT89S52可支持汇编语言和C语言,语言编程器Keil uVision4可以简化编程,可读性好,调试方便所以本系统软件主程序采用C
语言编写,将编辑好的程序编译后下载到单片机中实现软硬件的联调试。
3硬件电路设计
3.1系统硬件电路总体设计
根据系统的功能要求,硬件设计的基本思路是以单片机为核心,根据需要添
加相应的功能电路。
本装置以AT89S52为核心,由5部分电路组成:电源模块、CAN总线控制模块、显示模块、报警模块、单片机控制电路模块。
由以上5部分
组成本硬件电路智能报警系统的组网设计
3.2微处理器AT89S52
目前,总线接口电路的设计方法有如下两种:一种是带片内CAN控制器的
微控制器;另一种是微控制器与独立的CAN控制器。
本文选择用ATmel公司生产的与MCS-51兼容的低功耗、高性能的CMOS8位微控制器AT89S52。
AT89S52具有如下特点:8kBytes Flash片内程序存储器,256bytes的随机存
取数据存储器(RAM),32个外部双向输入/输出(I/O)口,5个中断优先级2
层中断嵌套中断,3个16位可编程定时计数器,2个全双工串行通信口,看门狗(WDT)电路,片内时钟振荡器。
3.3电源部分
电源变换电路原理图如图3.1所示,外接交流电220V经过变压器降压、桥
式整流电路得到12V直流电压。
再经电容滤波电路、三端稳压器7805得到5V电压,用做系统电源。
图3.1 电源电路
3.4CAN总线的接口电路设计
硬件电路的设计主要是CAN通信控制器与微处理器之间和CAN总线收发器
与物理总线之间的接口电路的设计。
CAN通信控制器是CAN总线接口电路的核心,主要完成CAN的通信协议,而CAN总线收发器的主要功能是增大信距离,提高系统
的瞬间抗干扰能力,保护总线,降低射频干扰(RFI),实现热防护等。
本文所设计的CAN总线接口电路是采用TJA1050作为微处理器,CAN总线
通信接口中采用PHILIPS公司的独立CAN通讯控制器MCP2515和高性能CAN总
线收发器TJA1050。
CAN总线接口框图3.2所示。
图 3.2 CAN总线接口框图
MCP2515在电路中是一个总线接口芯片,通过它实现上位机与现场微处理器
之间的数据通信。
该电路的主要功能是通过CAN总线接收来自上位机的数据命令,然后分析判断接收数据的内容,下位机将决定做出什么样的处理,当CAN总线接
口接收到下位机的上传数据, MCP2515就产生一个中断,引发微处理器产生中断,通
过中断处理程序接收每一帧信息并通过CAN 总线上传给上位机进行分析。
TJA1050是CAN总线接口电路的核心,其承担CAN 控制器的初始化、CAN的收发
控制等任务。
AT89S52是CAN总线接口电路的核心,其承担CAN控制器的初始化、CAN
的收发控制等任务。
在电路图中,AT89S52单片机的P1.0-P1.4端分别控制
MCP2515的RST、CS、SO、SI、SCK端。
MCP2515与单片机之间用SPI串行通信
方式,P1.1控制片选信号CS,当CS接到低电平时,MCP2515 被选中,CPU可对
MCP2515进行读/写操作。
3.5报警电路设计
声光报警电路主要由有源蜂鸣器、发光二极管及其驱动三极管组成。
当被监
测的传感器接发出报警模拟信号, 蜂鸣器鸣叫, 同时发光二极管也亮起来。
系统报
警电路由P2.0引脚驱动,当单片机判断有上面的情况发生时,P2.0输出低电平,
使图中的Q2导通,蜂鸣器发出声音,发光二极管发出光。
图中R21为上拉电阻,在系统上电或管脚初始化时防止管脚出现瞬时低电平而引发的误触发,造成错误
报警。
D3起保护蜂鸣器作用。
结束语
本文主要介绍了以下几个方面:
(1)了解目前智能系统监控装置的应用现状及发展,初步确定系统要实现
的功能。
分析了现场总线技术的特点和优点,通过对国内外研究现状分析,提出
了基于CAN总线的重型卡车监测智能系统的组网实现方式。
(2)重点智能系统的组网实现结构,并在CAN总线技术研究的基础上,设
计了基于CAN总线的组网系统。
并详细介绍了软、硬件开发的关键技术和实现方法。
参考文献
[1]李真花. CAN总线轻松入门与实践.北京航空航天大学出版社,2011.
[2]胡延平.皮带运输机常见故障的分析与处理[J]. 太原城市职业技术学院学报. 2007(04)
[3]郎贵彬.煤矿皮带运输机故障研究[J]. 科技信息. 2010(01)。