机械毕业设计472穿戴式机械腿机构设计论文正文
穿戴式机械腿机构的设计
题目申报表4、为结合学科竞赛;5、模拟仿真;6、其它题目来源--A.指导教师出题; B.学生自定、自拟;任务书开题报告Ekso Bionics,是一款可穿戴的、通过电池供电的仿生机械腿,将之穿在身上后,它可以提供必要的支撑力,让人重新站立。
而且整套系统还采用了仿生设计,以内置电动马达为动力,当人们把它穿在身上,就能重新获得行走的能力!Ekso Bionics图2.国内研究现状在下肢机器人方面,国内研究起步较晚,取得的成果也不多。
目前的研究机构主要有上海大学、浙江大学、哈尔滨工业大学和哈尔滨工程大学等。
具有代表性的是:哈尔滨工程大学开发的辅助型下肢康复训练机器人和浙江大学开发的可穿戴式的下肢步行外骨骼。
从2004年,中科院合肥智能机械研究所也开始从事相关的研究工作。
2002年,哈尔滨工程大学机电一体化研究所研制出了一种下肢康复训练机器人样,如图1-16所示,该机器人由三自由度步态机构、姿态机构和重心平衡机构等组成。
其优点是可实现脚的姿态调整,在机器人的远程控制技术、虚拟现实技术及减重控制策略方面进行了实验或仿真研究,后续研制并开发了可与该机器人配合使用的四自由度绳索牵引骨盆运动并联康复机器人。
2006年,上海大学机电工程与自动化学院也研究了一套可穿戴式助力机械腿,如图1-17所示。
单侧下肢有两个自由度,分别为骸关节屈/伸和膝关节屈/伸。
2007年,哈尔滨工程大学机电一体化实验室的研究小组研制了被动式步态康复训练器。
2009年,该研究小组又提出了步态训练机器,机器人可控制双足矢状面内六自由度的运动,具有承载能力强,步幅、步态、足底姿态可灵活调整等优点。
通过不同的轨迹规划,机器人能够模拟上、下楼梯,平地行走等步态动作。
利用柔顺控制等多种控制策略,可模拟沙地、草地等多种路况的行走。
实验研究表明,该机器人可实现多种步态的控制,且具有较好的训练效果。
三.发展的趋势2006年《中国人口老龄化发展趋势预测研究报告》表明,到2023年,我国老年人口将达到2.7亿,与0-14岁少儿人口数量相等。
本科毕业论文---四足步行机器人腿的机构设计(论文)设计
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
四足机器人腿部机械机构设计
摘要机器人的研发和使用现已经成为世界各国的重要科研项目,用它来代替人的操作项目或帮助残疾人完成自己不能完成的项目活动。
在工业,手工业,重工业等方面机器人的辅助功能尤为突出,大大提高了工作效率,节省开支。
四足机器人的行走机构是四足机器人运动的载体。
其中四足机器人的腿部是行走机构的重要组成部分。
因此,本文系统的介绍了国内外四足机器人的发展历史和发展情况,着重分析了四足机器人的腿部的机械结构并对此进行设计研究。
极大的提高了四足机器人的负载能力,减少了驱动原件的使用,同时结合模仿四足生物形态做出本次设计。
对设计的四足机器人腿部机械结构进行了细致的分析。
关键词:四足机器人;腿部机械机构;结构设计;2.1.2闭环平面四杆机构这种机构可以克服开链结构承载能力低的缺点,刚度更好,功耗更低,所以在机器人的领域当中收到了非常大的欢迎。
如图 2.5中的机构是我们经常使用的一种闭环平面四杆行走机构,如图 2.6中机器人承受的机体质量是由Z轴的驱动器完成,让机体前进的动力是由X轴和Y驱动器提供的,这样的话,它的内部就得到了非常好的协调和优化。
此缩放式腿机构还有成比例的特点,进而将驱动器的运动推进距离成比例放大成足端部的运动距离。
它的缺点是:缩放机构的直线驱动关节不管是圆柱坐标系还是笛卡尔坐标系都至少需要两个,从而使机械结构复杂,质量重,旦驱动距离影响机器人脚端的运动范围,运动空间较小。
图2. 5平面四杆行走机构图2. 6平面四杆行走机构坐标系模型建立如图所示的坐标系模型,髓关节为B点,围绕Z轴旋转,角度为a,悬长为 A 大腿杆A0绕0点旋转,杆长为妇,其与的延长线的夹角为。
;大腿杆。
2绕0 点旋转,杆长为其与8。
|的延长线的夹角为(P:由此可推出A点的运动轨迹方程为:-x A =ucosay A = it sin a式(2-5)「N = A + L?cosJ3 + L3COS^.v= L2sin /7 + Z^sin^众所周知,当四杆机构的两杆发生重合时,机构就会出现死点,为了阻止四杆机构出现死点情况,现有的办法是规定大、小腿杆之间的角度,最大角度为吮心,最小角度为Ymin,在各种情况之下的两杆之间的角度Y,都应该做到满足Ymax> Y > Ymin约束自己的情况。
毕业设计(论文)机器人行走机构 文献综述
重庆理工大学毕业设计(论文)文献综述题目机器人行走机构设计二级学院重庆汽车学院专业机械设计制造及其自动化班级姓名学号指导教师系主任时间评阅老师签字:机器人行走机构吴俊摘要:行走机器人是机器人学中的一个重要分支。
行走机构可以是轮式的、履带式的和腿式的等,能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。
本文从国内外的研究状况着手,介绍了行走机器人的发展历史,研究现状和发展趋势。
本文还介绍了国内最新的研究成果。
关键字:机器人行走机构发展现状应用Keyword:robot travelling mechanism developing current situation application一,前言行走机器人是机器人学中的一个重要分支。
关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等;其次,必须考虑驱动器的控制,以使机器人达到期望的行为;第三,必须考虑导航或路径规划。
因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。
机器人的机械结构形式的选型和设计,应该根据实际需要进行。
在机器人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性的工作。
对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。
当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和广阔的应用前景而成为智能机器人发展的方向之一。
二、课题国内外现状多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足动物运动形式的特种机器人, 是一种足式移动机构。
一种新型穿戴式下肢外骨骼机器人的设计

Chinese Journal of R eh a b H i t at i o n Medicine. Mar. 2019. \01. 34. No.3•康复工程•-种新型穿戴式下肢外骨骼机器人的设计”魏小东2" 喻洪流宀 孟青云小'胡冰山小 孟巧玲⑴ 曹武警⑴脑卒中及脊髓损伤造成的偏瘫利截瘫患者逐年增加,偏瘫和截瘫患者只能长期卧床或者借助轮椅进行活动,给家庭 和社会带来巨大的负担融合机器人技术、传感器技术等前 沿科技,可辅助使用者进行日常活动的穿戴式下肢外骨骼机 器人逐渐成为研究的热点E国内外学者均对穿戴式下肢外骨骼机器人做过有益的探索日本筑波大学研发的下肢外骨骼机器人HAL 采用4 个电机岖动.通过采集皮肤的肌电信号(EMG)来判断人的 运动意图,从而驱动电机带动关节运动.总重12kg 12-'1以色列RcWalk Robotics 公司研发的下肢外骨骼机器人ReWalk 也采用4个电机驱动,附加一对拐杖来保持平衡,并通过佩戴在手腕匕的控制器来选择运动模式,总重23kgHT g-dego 是美国范德堡大学研制的下肢外骨骼机器人.采用模块化设计思想.包括1个髓关节模块,2个大腿模块.2个小腿模块.外加一对拐杖用来保持行走过程中的平衡,总重12kg ”T 浙江大学杨灿军教授团队研发了气动下肢外骨骼机器人.在髓关节和膝关节加有气体嗽动e 电子科技大学 机器智能研究所研发了 ALDER 下肢外骨骼机器人.髓关节 和膝关'P 采用电机驱动,以此来帮助使用者进行日常活动,总重约20kgM 综I:所述,当前穿戴式下肢外骨骼研究多以 ffi 膝关节外力驱动,虽然可保证足够的驱动自由度,但是也导致下肢外骨骼体积、重量过大,“能源使用时间难以满足日常生活需要:因此.本研究设计出一款双电机驱动髓关 节、膝关节无动力驱动的下肢外骨骼机器人结构,在保证其性能的前提下.减轻了下肢外骨骼机器人的重量:该研究在提出的新型下肢外骨骼机器人(即髓关节电机 驱动,膝关节采用四连杆机构,气弹簧只助力坐下——站V :姿态变化.踝膝联动的下肢外骨骼机器人)基础上,通过MATLAB 和SolidWorks 仿真进行分析验证1机械系统的设计1.1自由度设计F 肢共包含14个自由度(单腿7个自由度).包括髓关节的屈曲伸展、内收外展和内旋外旋.膝关节的屈曲伸展,踝关节的跖屈背屈、内翻外翻和旋内旋外何。
仿人双足机器人机构的设计毕业论文
仿人双足机器人机构的设计毕业论文毕业设计中文摘要仿人双足机器人是机器人研究的前沿领域,是多种科技的结合,代表一个国家的技术水平。
仿人双足机器人最大的特征就是双足步行,因此它的灵活性很高,可以代替人类完成危险作业。
本文回顾了国内外仿人双足机器人的发展历史,在分析人类下肢结构的基础上,确定机器人机构的自由度配置、关节结构及驱动形式。
在inventor环境下进行机构的建模及装配,完成仿人双足机器人机构的设计,最后对仿人双足机器人机构进行运动模拟和强度分析,检验机构的运动性能和强度,进一步优化机构的设计。
关键词:仿人双足机器人,机构设计,运动模拟,强度分析毕业设计外文摘要TitleDesignofhumanoidbipedrobotAbstractHumanoidbipedrobotisafrontierfieldofrobotresearch,istheco mbinationofscienceandtechnology,thetechnicallevelonbehalfofa country''s.Characteristicsofhumanoidbipedrobotisthebiggestbip edwalking,soitshighflexibility,canreplacehumandodangerouswor k.Thispaperreviewsthedevelopmenthistoryofdomesticandforei gnhumanoidbipedrobot,basedonanalysisofhumanlowerlimbstructure,determinetherobotDOFconfiguration,jointstructureanddriv emode.Modelingandassemblymechanismbasedoninventor,com pletedthedesignofhumanoidbipedrobotmechanism,finallycarries ontheanalysisofmotionsimulationandstrengthofhumanoidbipedr obot,motionperformanceandthestrengthoftheinspectionorganiz ation,andfurtheroptimizethemechanismdesign.KeywordsHumanoidbipedrobot,mechanismdesign,motionsimulation,strengthanalysis目录1绪论..................................................................................................11.1课题研究的意义...........................................................................11.2国内外仿人双足机器人发展现状................................................21.3本课题研究的主要内容.............................................................112仿人双足机器人机构设计.............................................................122.1人体下肢分析.............................................................................122.2仿人双足机器人总体设计..........................................................202.3仿人双足机器人关节设计..........................................................232.4仿人双足机器人总体结构..........................................................352.5本章小结....................................................................................373机器人机构的运动模拟.................................................................383.1行走的运动模拟.........................................................................383.2蹲下的运动模拟.........................................................................413.3转弯的运动模拟.........................................................................433.4本章小结....................................................................................434机器人机构的强度分析.................................................................454.1静态强度分析.............................................................................454.2运动载荷下的强度分析.............................................................484.3本章小结....................................................................................51结论....................................................................................................52致谢.................................................................错误~未定义书签。
可穿戴式助残机械腿的结构设计与分析
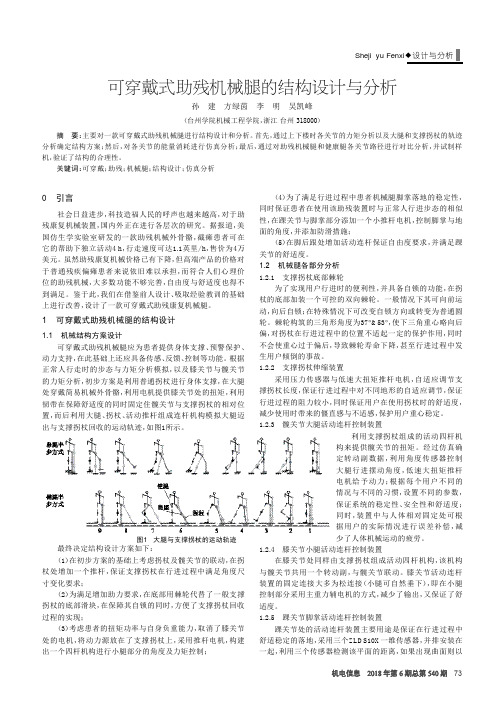
0 引言
社会日益进步,科技造福人民的呼声也越来越高,对于助 残康复机械装置,国内外正在进行各层次的研究。据报道,美 国仿生学实验室研发的一款助残机械外骨骼,截瘫患者可在 它的帮助下独立活动4 h,行走速度可达1.1英里/h,售价为4万 美元。虽然助残康复机械价格已有下降,但高端产品的价格对 于普通残疾偏瘫患者来说依旧难以承担,而符合人们心理价 位的助残机械,大多数功能不够完善,自由度与舒适度也得不 到满足。鉴于此,我们在借鉴前人设计、吸取经验教训的基础 上进行改善,设计了一款可穿戴式助残康复机械腿。
73
设计与分析◆Sheji yu Fenxi
前后两个传感器为基准,通过电机改变角度,并设置角度范 围,保证与平面的稳定接触。
助残机械腿具体结构如图2所示。
图4 踝关节路径对比图
图2 助残机械腿结构 1.3 机械腿材料选择
考虑到轻便美观以及价格与适配性,选择铝合金作为助 残康复机械腿的骨骼支架材料。铝合金质轻易加工,同时具备 一定的经济性。
Sheji yu Fenxi◆设计与分析
可穿戴式助残机械腿的结构设计与分析
孙 建 方绿茵 李 明 吴凯峰 (台州学院机械工程学院,浙江 台州 318000) 摘 要:主要对一款可穿戴式助残机械腿进行结构设计和分析。首先,通过上下楼时各关节的力矩分析以及大腿和支撑拐杖的轨迹 分析确定结构方案;然后,对各关节的能量消耗进行仿真分析;最后,通过对助残机械腿和健康腿各关节路径进行对比分析,并试制样 机,验证了结构的合理性。 关键词:可穿戴;助残;机械腿;结构设计;仿真分析
图3 各关节能量消耗图 由图3可知,各关节的消耗在行进过程中基本保持在较低 水平,结合实际可知该机械腿可以正常工作。 2.2 行进时助残机械腿的关节轨迹分析 在行进过程中助残机械腿与健康腿各个关节路径角度变 化对比如图4~图6所示。 分析图4~图6机械腿与健康腿各关节的仿真数据可知, 健康腿的行走姿势与助残机械腿不尽相同,所有数据变化有 时会 出 现 先后 顺 序 的波 动 ,但 在 行 进 过 程 中 起 末 位 置 即 功 能 要 求 该 助 残 机 械 腿 已 经 达 到,该 机 械 腿 的 行 走 路 径 不 会 对 人 体 产 生 不 利 影 响 ,与 人 体 的 适 应 性 较 好 ,可 达 到 实 际 的 使 用 要求。
毕业论文(设计)基于matlab的双足步行机器人腿部运动模型的建立与运动仿真
诚信声明本人郑重声明:本论文及其研究工作是本人在指导教师的指导下独立完成的,在完成论文时所利用的一切资料均已在参考文献中列出。
本人签名:年月日毕业设计任务书设计题目:基于MATLAB的双足步行机器人腿部运动模型的建立与运动仿真系部:机械工程系专业:机械电子工程学号:112012337学生:指导教师(含职称):(讲师)专业负责人:1.设计的主要任务及目标1)通过查阅有关资料,了解双足型机器人主要技术参数;2)双足型机器人的腿部模型建立及运动部件设计3)利用Pro/E完成动作的仿真2.设计的基本要求和内容1)双足型机器人的腿部功能选择;2)模型的建立;3)运动的仿真4)完成毕业设计说明书的撰写3.主要参考文献[1] 孙增圻.机器人系统仿真及应[ J ].系统仿真报,1995 ,7( 3 ):23-29.[2] 蒋新松,主编.机器人学导论[ M ].沈阳:辽宁:辽宁科学技术出版社,1994.[3] 蔡自兴.机器人学[ M ].北京:清华大学出版社,2000.[4] 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[ M ].北京:清华大学出版社,20024.进度安排设计各阶段名称起止日期1 发放毕业设计题目及选题2015.03.03—2015.03.232 查阅文献,了解研究意义,完成开题报告2015.03.24—2015.04.133 编写说明书,已完成工作,完成中期答辩2015.04.14—2015.05.044 继续编写毕业设计说明书2015.05.01—2015.06.015 提交设计说明书,完成毕业答辩2015.06.02—2015.06.22审核人:年月日基于Matlab的双足步行机器人腿部运动模型的建立与运动仿真摘要:最近几年,双足仿人步行机器人发展很快,有很高的科学研究价值。
步行机器人的运动是模仿人的步行运动的形式,相比其它机器人有更好的灵活性,所以可以完成各种生活中的难度更大的任务,实用价值远高于其它机器人,当然研究难度和控制也相当复杂。
穿戴式下肢外骨骼康复机器人机械设计

穿戴式下肢外骨骼康复机器人机械设计DesignXXX of the robot。
as well as the key issues in the design process。
were analyzed based on its n and working principle。
nics was used to design the degree of freedom。
range of n。
and link size of the exoskeleton robot。
XXX research。
analysis。
and design.XXX: XXX。
XXX。
nics。
XXX.穿戴式下肢外骨骼康复机器人是一种带有助力功能的外骨骼装置,被穿戴在患者的下肢外部。
除了提供助力、保护和身体支撑等功能外,它还融合了传感、控制、信息获取和移动计算等机器人技术,使得机器人能够在患者的无意识控制下完成助力行走等任务,是一个典型的人机一体化系统。
在医学领域,许多机构正在积极投入研究,如XXX的eLEGS、XXX的HAL系列下肢外骨骼机器人、XXX的“动力辅助服”PAS和以色列的rewalk助走器等。
本文设计的穿戴式下肢外骨骼康复机器人主要用于截瘫、踝部以上部位下肢手术患者以及骨关节炎患者的康复治疗。
对于截瘫患者,它能够与患者实现人机结合,以正确的助力方式带动病人进行类正常人的行走,从而协助患者迅速康复。
对于踝部以上部位下肢手术患者,外骨骼机器人可用于手术后下肢体的运动康复,加快患者下肢肌肉运动能力的恢复。
对于骨关节炎患者,外骨骼机器人可以通过助力减轻行走过程中膝关节的疼痛感。
穿戴式下肢外骨骼康复机器人的工作原理是通过符合或跟随人节拍的适当转矩、驱动机器人髋、膝、踝关节转动,从而在穿戴者腿部绑带及足部产生相应的助行力,实施了对患者的康复助行。
设计中的关键问题是在实现目标功能的基础上,充分考虑轻量化、集成小型化、穿戴方便和快速可调的原则。
可穿戴辅助机械腿结构设计与分析论文设计
目录摘要 (1)ABSTRACT (2)1 绪论 (3)1.1 课题背景 (3)1.2 课题研究的目的及意义 (3)1.3 可穿戴辅助机械腿的国内外研究现状 (4)1.4 本课题的主要内容 (8)1.5 本课题的研究方法 (8)2 可穿戴辅助机械腿传动方案设计 (9)2.1传动方案的选择 (9)2.2 可穿戴辅助机械腿关节转矩的计算 (10)2.2.1 关节一 (10)2.2.2关节二 (11)2.2.3关节三 (11)2.2.4关节四 (11)2.2.5关节五 (11)2.2.6关节六 (11)2.3减速器选型 (12)2.4电机选型 (12)2.5电机发热校核 (13)2.6本章小结 (14)3 可穿戴辅助机械腿的结构设计 (14)3.1 人体腿部生物原型介绍 (14)3.1.1人体腿部运动原理 (14)3.1.2人体腿部尺寸结构 (15)3.1.3 人体下肢主要关节的运动特性 (16)3.2 可穿戴辅助机械腿模型的建立 (17)3.2.1 可穿戴辅助机械腿的结构特点 (17)3.2.2 可穿戴辅助机械腿的整体设计 (18)3.3 可穿戴辅助机械腿的结构分析 (19)3.3.1 髋关节结构分析 (19)3.3.2 膝关节结构分析 (20)3.3.3踝关节结构分析 (20)3.3.4 大腿、小腿结构分析 (21)3.4 本章小结 (22)4 可穿戴辅助机械腿强度校核 (22)4.1 solidwork simulation插件的简单介绍 (22)4.2 髋关节冠状面旋转运动减速器壳体强度校核 (23)4.2.1模型 (23)4.2.2 材料设置 (24)4.2.3 夹具设置和载荷设置 (24)4.2.4 网格划分 (25)4.2.5 结果分析 (26)4.3 髋关节冠状面旋转运动减速器连接件强度校核 (26)4.3.1模型 (26)4.3.2 材料设置 (27)4.3.3 夹具设置和载荷设置 (27)4.3.4 网格划分 (28)4.3.5 结果分析 (29)4.4 髋关节冠状面减速器壳体与矢状面减速器壳体连接件强度校核 (29)4.4.1模型 (29)4.4.2 材料设置 (30)4.4.3 夹具设置和载荷设置 (30)4.4.4 网格划分 (31)4.4.5 结果分析 (32)4.5 髋关节矢状面旋转运动减速器壳体强度校核 (33)4.5.1模型 (33)4.5.2 材料设置 (33)4.5.3 夹具设置和载荷设置 (33)4.5.4 网格划分 (34)4.5.5 结果分析 (35)4.6 髋关节矢状面减速器壳体与髋关节水平面减速器壳体连接件强度校核 (35)4.6.1模型 (35)4.6.2 材料设置 (36)4.6.3 夹具设置和载荷设置 (36)4.6.4 网格划分 (37)4.6.5 结果分析 (38)4.7 髋关节水平面旋转运动减速器壳体强度校核 (39)4.7.1模型 (39)4.7.2 材料设置 (39)4.7.3 夹具设置和载荷设置 (39)4.7.4 网格划分 (40)4.7.5 结果分析 (41)4.8 本章小结 (41)5 结论与展望 (42)5.1 作者的工作 (42)5.2 展望 (43)参考文献 (44)摘要目前,机器人技术已经是相对比较成熟的。
实习论文-穿戴式机械腿机构设计
实习论文3月11日,下午2点半,扬州大学广陵学院机械电子工程系组织一次参观实习活动,我们去的是扬州海昌粉末冶金有限公司。
扬州海昌成立于2001年1月,注册资本500万,厂房占地37亩,工厂建筑面积12000平方米。
2013年6月组建粉末注射(MIM)和齿轮箱事业部。
拥有多条标准的粉末冶金生产线,目前贵公司有国内先进的高精度机械式成形机和精整机60余台,连续式的烧结炉,高温烧结炉,蒸汽处理炉,渗碳炉,深冷设备10余台,丰富精密的检测设备:三次元,投影仪,粗糙度仪,轮廓度仪,金像分析仪等30余台。
“诚信经营,精良品质,卓越服务”是贵公司的的企业宗旨。
积极、高效、专业的人才是他们的成长基石,而同事间则是相互信任、尊重和坦诚的。
贵公司重视科技与人才,通过斥巨资购买国内外粉末冶金专业设备,同时培养吸纳一批粉末冶金的专业团队。
贵公司自成立以来,实行严密的检测手段和管理制度,于2004年1月通过ISO9001:2000认证,并在2011年10月获得了TS16949质量体系管理证书。
目前贵公司可依照 GB、 JIS 、 DIN 、 MPIF 标淮为世界500强的电动工具,汽车,家电企业配套,主要生产专业粉末冶金的各类铁基、铜基含油轴承、高强度齿轮件及各种结构等零件。
此次半天参观实习,和去年4月份去洛阳一拖实习性质差不多,我们坐校车去该贵公司,路途中,学校老师就跟我们介绍贵公司,我心中十分好奇,真想立马就到。
不到一小时,我们终于到了,迎面扑来的是高端大气上档次的厂房,我们能闻到机械原料味道和熟悉的机械工作声音,相当于导游一样的贵公司介绍人,开始带我们去参观实习。
贵公司介绍人主要带我们去看了PM生产设备,MIM生产设备,Gear-box生产设备,检测设备,Gear-box检测设备。
PM是预防维护和生产维护的总称,(1)清扫:不只是表面,要将犄角旮旯清扫干净,让设备、工装的磨损、噪音、松动、变形、渗漏等缺陷暴露出来,及时排除。
穿戴式机械腿机构设计
中文摘要本论文研究穿戴式机械腿机构。
穿戴式机械腿是一种典型的人机一体化系统,该机构是一种穿戴于人体腿部帮助有下肢乏力的患者进行康复治疗的机械结构。
本文在人-机相容性方面做了详细的分析,使本机构在较好的穿戴位形下依靠人体的运动信息控制穿戴式机器人,在运动过程中提高人机步态的一致性,达到更好的康复治疗的目的。
论文分析了国内外研究现状,了解了国内外相关研究的背景情况、研究进展和未来的发展问题,总结了下肢康复机器人研究中还存在的问题,进而确定了本文的主要研究内容及所需解决的关键问题。
本文确定了下肢康复机器人机构的自由度,对机构进行了关节布位,通过自由度的分析对人-机联接模式和约束性质进行了研究,从而确定了骨骼-机构联体模型。
在人体骨骼模型的基础上,提出了一种机构构型方案。
对人-机相容性进行了定义,分析了人-机相容性的影响因素。
在此基础上分别对人体下肢骨骼模型和这种机构构型进行了三维模型设计。
关键词:康复机器人,人-机相容性,机构设计This study discusses lower extremity rehabilitative robot. The lower extremity rehabilitative robot is a typical man-machine integrated system; it is worn on the body of a limb to help patients with physical disabilities rehabilitation of mechanical devices. In this paper, man-machine compatibility has done more analysis and with well wearing this equipment to rely on the human body configuration under the control of lower extremity rehabilitative robot motion information. It improves the consistency rehabilitation of human gait in the course of the campaign to achieve better purposes.This paper analyzes the research situation and has a research about the background of relevant research at home and abroad, progress of research and future development. Lower extremity rehabilitation robot research summarized the problems still exist, and then this article determines the main contents, and the key issues need to be resolved. This paper has identified the DOF of lower extremity rehabilitative robot and the joint distribution of digital agencies. Through the analysisin freedom this article do the research on the human-machine connection mode and the nature binding. Two programs of mechanism are proposed based on the bone一body conjoined model. The study defines the compatibility of human-machine and analyzes the compatibility factors of human-machine. On this basis, the human skeleton model and the configuration of the two agencies are conducted by the three-dimensional model design respectively.Keywords: rehabilitative robotics, man-machine compatibility, mechanism design中文摘要 (I)Abstract (II)第一章绪论 (1)1.1研究背景 (1)1.2下肢康复机器人概况 (2)1.2.1康复机器人研究历史 (2)1.2.2下肢康复机器人分类 (3)1.3下肢康复机器人的研究现状 (5)1.3.1国外研究现状 (5)1.3.2国内研究现状.................................................................................;.. (9)1.4下肢康复机器人研究存在的问题 (11)1.5课题意义及主要研究内容 (11)第二章穿戴式机械腿机构运动分析 (13)2.1 引言 (13)2.2人体下肢生物骨骼模型 (13)2.3骨骼的运动与下肢关节 (13)第三章穿戴式机械腿机构设计 (19)3.1穿戴式机械腿设计 (19)3.1.1三维模型设计 (19)3.1.2膝关节、踝关节及脚部设计 (21)3.1.3下肢连接器 (26)3.1.4大小腿弹簧助力器及保护 (26)3.1.5下肢骸部设计 (28)3.1.6 腿部固定 (30)第四章强度校核 (31)4.1关节旋转连接器受力分析 (31)设计总结 (34)参考文献 (36)致谢 (38)第一章绪论1.1研究背景我国已经进入老龄化社会,老龄化问题逐渐得到关注。
多足机器人行走机构设计(论文)

高职学生毕业设计题目:多足机器人行走机构设计学院: 机械自动化学院专业:学号:学生姓名:指导教师:日期:摘要本文旨在设计一种能够实现灵活、全方位运动的机器人的行走机构。
本文设计的多足步行机器人具有冗余驱动、运动拓扑的特点。
为实现其步行全方位机动性及作业多功能性,需要解决一系列的技术问题,而结构设计是其中的关键。
首先,对于国内外机器人的发展现状进行阐述和比较,并分析了多足机器人的研究趋势;接着,从机构自由度入手,明确设计思路,确定行走机构结构,对主要零件、构件进行设计,分析机构的受力情况,找出较危险的零件,并对其强度进行校核。
最后,初步研究了机器人的行动方式,拟定了简单的步态规划方案,规划了机器人直线行走步态、定点转弯步态。
关键词:多足机器人;机构自由度;行走机构;机构设计AbstractThis paper aims to design a travelling mechanism of a flexible and omnibearing motorial robot. The multiped walking robot referred to this paper has the characteristics of redandant drive and topological motion. In order to achieve its omnibearing walking mobility and working polyfunctionality, a series of technique questions need to resolved, of which the structural design is the key point.Firstly, the paper states the current situation of the robots development and compares the differences of the robots both domestic and overseas. Moreover ,it analyses the research trend of multiped robots. Secondly, it make clear of the designing ideas and confirm the travelling mechanism in terms of the structural variance,as well as designing the major parts and constuctional elements. Besides ,it analyses the stress state of the mechanism,trying to find out the rather dangerous parts and checking their intensity. Finally, it initially research the walking patterns of the robots and make out a simple tread program, which plans out the robot tread of linear walking and fixed point swerving.Keyword:Multiped robot;Degree of freedom;travelling mechanism;Mechanical design目录第一章绪论 (1)1.1 引言 (1)1.2国内外多足机器人发展概况 (1)1.3 多足机器人研究发展趋势 (3)第二章多足机器人行走机构的设计及校核 (5)2.1 多足机器人行走机构结构的拟定 (5)2.2 重要组件的设计及校核 (6)2.2.1 重要组件的选定 (6)2.2.2 圆柱凸轮的设计 (7)2.2.3 凸轮滚子轴的强度校核 (7)第三章其它部分设计 (9)3.1 电机和减速器的选用 (9)3.2 机器人步态初步规划 (9)设计总结 (11)参考文献 (12)致谢 (13)第一章绪论1.1 引言步行机器人是模仿动物的运动形式,采用腿式结构来完成多种移动功能的一类特种机起人。
四足步行机器人行走机构设计毕业设计

四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
《新型轮腿式机器人的设计与仿真》范文

《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的飞速发展,机器人技术已经广泛应用于各个领域。
其中,移动机器人是机器人技术的重要组成部分。
为了提高机器人的适应性和灵活性,本文提出了一种新型轮腿式机器人设计。
该设计旨在结合轮式和腿式移动方式的优点,使机器人能够在各种复杂环境中灵活移动。
本文将详细介绍该新型轮腿式机器人的设计思路、设计方法以及仿真结果。
二、新型轮腿式机器人的设计思路1. 设计需求分析在设计新型轮腿式机器人时,我们首先分析了机器人的应用场景和功能需求。
考虑到机器人需要在复杂环境中灵活移动,我们确定了以下设计需求:高灵活性、高适应性、高负载能力以及低能耗。
2. 结合轮式与腿式移动方式的优点为了满足上述设计需求,我们提出了将轮式和腿式移动方式相结合的设计思路。
轮式移动方式具有速度快、能耗低的优点,而腿式移动方式则具有高适应性和高负载能力的特点。
因此,我们将轮式和腿式移动方式的优势相结合,设计出一种新型轮腿式机器人。
三、新型轮腿式机器人的设计方法1. 机械结构设计机械结构设计是新型轮腿式机器人设计的关键步骤。
我们采用了模块化设计思想,将机器人分为轮式模块和腿式模块。
轮式模块采用传统轮式结构,以实现快速移动;腿式模块则采用多关节结构,以实现高适应性和高负载能力。
此外,我们还设计了可切换的轮腿转换机构,使机器人能够在轮式和腿式之间灵活切换。
2. 控制系统设计控制系统是新型轮腿式机器人的大脑。
我们采用了先进的传感器技术和控制算法,实现了对机器人的精确控制。
同时,我们还设计了能量管理系统,以实现低能耗运行。
四、仿真实验与分析为了验证新型轮腿式机器人的设计效果,我们进行了仿真实验。
仿真实验结果表明,该机器人在各种复杂环境中均能实现灵活移动,且具有高灵活性、高适应性、高负载能力和低能耗等优点。
具体分析如下:1. 灵活性分析在仿真实验中,我们发现新型轮腿式机器人在面对复杂地形时表现出色。
在崎岖不平的地形中,机器人能够通过切换为腿式模式,实现灵活的移动。
机械毕业设计(论文)-四足机器人结构设计(全套图纸)[管理资料]
![机械毕业设计(论文)-四足机器人结构设计(全套图纸)[管理资料]](https://img.taocdn.com/s3/m/dbf7c81c0975f46526d3e156.png)
摘要四足机器人步行腿具有多个自由度, 落足点是离散的, 故能在足尖点可达域范围内灵活调整行走姿态, 并合理选择支撑点, 具有更高的避障和越障能力。
对四足机器人的行走典型步态进行必要的分析比较,选择本次毕业设计四足机器人的步态——小跑步态,并对小跑步态进行设计。
对腿关节结构是使用电动机驱动关节运动还是使用传统的连杆机构(四杆机构、五杆机构、六杆机构等)驱动关节运动进行比较,同时对机构的自由度进行分析,选择一个自由度的斯蒂芬森型机构作为四足机器人的行走结构,并且引用了已经运用成熟的腿机构。
考虑到驱动系统的安装,选择一个电动机驱动四足机器人的行走机构,通过同步带驱动四条腿,减少了电动机的数目,减轻了四足机器人的负载,减少对腿关节运动的影响。
本毕业设计通过涡轮蜗杆传动和齿轮传动,设计出了蜗杆二级减速器,第一级减速为蜗杆涡轮减速,第二级减速为齿轮减速。
并对关键零部件进行必要计算和校核,从而得到四足机器人稳定步行所需要的速度,最终实现了四足机器人的步行。
关键词:四足哺乳动物;四足机器人;机器人步态;行走结构;蜗杆二级减速器全套图纸加153893706AbstractWalking legs of quadruped robot has multiple degrees of freedom , points of the foot are discrete , it can be flexibly adjusted walking posture within the gamut reach for the toe point , and a reasonable choice of the anchor , it gets a higher obstacle and avoidance ability . It is necessary to analysis and compare typical gait of quadruped walking robot, trotting gait is selected to be this graduation project quadruped robot gait. To compare the driving articulation that the leg joints structure is driven by the motor or the use of traditional articulation linkage (four agencies, five agencies, six institutions, etc.), while the degree of freedom mechanism is analyzed,to choose one degree of freedom structure Stephenson type mechanism as walking quadruped robot, and refers to already is used of mature leg mechanism. Taking into account the installation of the drive system, to choose a motor drive mechanism of quadruped walking robot, by timing belt drive four legs,the number of motor is reduced , it reduces the load on the four-legged robot , it reduces the impact on the movement of the leg joints .Two worm reducer is designed by designing worm gear and gear in the graduation design , the first stage reduction is a worm and wheel reducer , the second stage reduction is a gear reducer . And it is necessary to carry out calculations and check of key components, and to get speed required of quadruped robot walking is stable , ultimately , walking of quadruped robot is achieved.Keywords:quadruped mammal;quadruped robot; gait; walking structure; two worm reducer目录1.引言 (5)步行机器人 (5)步行机器人的发展 (5)步行机器人常见的连杆机构 (6)2. 四足机器人步态的设计 (6)3. 行走结构的设计 (7)四足机器人腿结构的配置形式 (7)开链式腿结构 (8)闭链式腿结构 (9)弹性腿结构 (10)机构自由度 (11)步行机构的选择方案 (12)对腿机构分析 (13)分析绞链点D的轨迹 (13)腿机构优化设计 (15)机器人腿足端的轨迹分析 (17)4. 传动结构的设计 (18)驱动方案 (18)传动方案 (18)驱动电动机 (20)普通圆柱蜗杆传动的主要参数及其选择 (21)普通圆柱蜗杆传动承载能力的计算 (22)蜗杆传动设计准则和常用材料 (22)涡轮齿面接触疲劳强度计算 (23)涡轮齿根弯曲疲劳强度计算 (24)蜗杆的刚度计算 (25)涡轮蜗杆传动的计算 (25) (29)5. 确定各轴的最小直径及轴承 (35)6. 轴的校核 (36)蜗杆上的作用力及校核轴径 (36)涡轮轴上的作用力及校核轴径 (37)输出轴上的作用力及校核轴径 (40)7. 键连接与计算校核 (42)8. 三维建模及平衡校核 (43)9. 结论 (43)论文完成的主要工作 (44)结论 (44)谢辞 (45)参考文献 (46)1.引言步行机器人在人类社会和大自然界中,有许多危险的地方,危及到人类自身生命安全,是我们人类无法直接到达的,于是人类研发出步行机器人,代替人类进行探索研究。
穿戴式下肢外骨骼机器人的结构设计与仿真_孙明艳
图 6 虚拟样机模型
表 1 髋、膝、踝关节输入输出角度 偏差函数的情况
关节
右髋关节 左髋关节 右膝关节 左膝关节 右踝关节 左踝关节
最大幅值 26.85 21.1 0.113 0.104 88.77 99.57
偏差函数 均值 -26.85 21.06 -0.031 -0.025 -88.77 -99.57
外骨骼机器人整体结构如图 1 所示,其中 腰带结构 1 用以模拟人体大腿与髋部的连接形 式,来满足人在运动过程中机械结构的自由度 要求;大腿杆 3 用以连接髋关节和膝关节;膝 关节 4 采用四杆机构替代传统的单自由度的转 动副结构;小腿杆 5 用以连接膝关节和踝关节。
其中膝关节设计采用四连杆结构,通过优 化可以使四杆机构的瞬心轨迹与人体膝关节瞬 心轨迹接近,从而达到外骨骼与人体协调性较 好的目的。许多文献都曾报道过四杆机构膝关 节的具体设计和优化,在此直接参考文献中的 具体尺寸,如图 2 所示,其中 LAB=58.1,LBC =49.5,LCD=50.2,LDA=32.6,α=25.52,θ4 =26[10]。
外骨骼机器人,是一种可供人体穿戴的人 机一体化的智能机械装置[1]。利用它不仅可以 增强士兵的负重能力、跑跳能力、肢体力量、 以及防护能力,从而全面提高士兵的野外作战 水平,还能使士兵在车辆不能到达的复杂地形 条件下完成长途跋涉和侦察工作,因而具有广
泛的军事应用前景[2]。近年来该领域的研究受 到了广泛的重视,许多国家着眼于未来战争的 需要,都在积极投入研制。目前,美国在这方 面的研究走在了世界前列。先后研制了针对单 兵使用的代号为 BLEEX、HULC、XOS、XOS2、 XOS3 等外骨骼机器人,其中 HULC 系统已经
状面内腿和脚的运动,其他不考虑。结果是: 髋关节,膝关节,踝关节各设置一个自由度, 可实现大腿、小腿和脚的屈伸。
毕业论文:机械手毕业设计正文
摘要随着社会的进步和科技的发展,机器人产品开始进入到生产过程和日常生活中,各种类型的机器人在特定的工作环境下发挥着越来越重要的作用。
但是目前对于移动式机器人多采用轮式移动机构,在适应复杂地形时无法满足路况的要求,由此设计一种灵活的、行走平稳和对路况适应性强的机器人成为解决此类问题的关键。
根据昆虫运动时采用的三角步态走法设计了机器人的腿部五连杆行走机构,并对其进行了占空比、稳定性、转弯状态等分析,由程序来控制机器人的动作。
关键词:慧鱼机器人,工业机器人,仿生机器人With the development of society and technology, robotics products began to enter into the process of production and daily life, various types of robots play amore and more important role in the specific working environment. However, for a mobile robot with wheeled mobile mechanism, can not meet the requirement inthe complex terrain conditions, thus a key flexible, steadyrunning and be on the road the adaptability of the robot to solve this kind of problem design. According to the tripod gait of insectsby movement of the walking legs mechanism design of five link robot, and has carried on the analysis, the stability of duty ratio, turning state, the program to control the movement of the robot.目录1 绪论 (1)1.1机械手概述 (1)1.2机械手的组成和分类 (2)1.2.1 机械手的组成 (2)1.2.2 机械手的分类 (4)1.3国内外发展状况 (6)1.4课题的提出及主要任务 (8)1.4.1 课题的提出 (8)1.4.2 课题的主要任务 (9)2 机械手的设计方案 (10)2.1机械手的座标型式与自由度 (10)2.2机械手的手部结构方案设计 (10)2.3机械手的手腕结构方案设计 (10)2.4机械手的手臂结构方案设计 (10)2.5机械手的驱动方案设计 (11)2.6机械手的控制方案设计 (11)2.7机械手的主要参数 (11)2.8机械手的技术参数列表 (11)3 手部结构设计 (14)3.1夹持式手部结构 (14)3.1.1 手指的形状和分类 (14)3.1.2 设计时考虑的几个问题 (14)3.1.3 手部夹紧气缸的设计 (15)3.2气流负压式吸盘 (18)4 手腕结构设计 (21)4.1手腕的自由度 (21)4.2手腕的驱动力矩的计算 (21)4.2.1 手腕转动时所需的驱动力矩 (21)5 手臂结构设计 (25)5.1手臂伸缩与手腕回转部分 (25)5.1.1 结构设计 (25)5.1.2 导向装置 (26)5.1.3 手臂伸缩驱动力的计 (26)5.2手臂升降和回转部分 (27)5.2.1 结构设计 (27)5.3手臂伸缩气缸的设计 (28)5.4手臂伸缩、升降用液压缓冲器 (31)5.5手臂回转用液压缓冲器 (32)6 结论 (33)参考文献 (34)致谢 (36)1 绪论1.1 机械手概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
多功能机械腿的作文630个字
多功能机械腿的作文630个字英文回答:The versatile robotic leg is a highly advanced mechatronic system that combines mechanical, electrical,and computer engineering to create a functional and adaptable replacement for a natural human leg. It is designed to provide mobility, stability, and support to individuals with upper or lower limb deficiencies or those who have lost their limbs due to trauma or disease.The robotic leg consists of several crucial components, including a lightweight and robust skeletal structure,high-torque motors, intelligent sensors, advanced actuators, a microprocessor-based control system, and a user-friendly interface. These components work in harmony to replicatethe natural movements and functions of a biological leg.One of the primary advantages of the versatile robotic leg is its exceptional adaptability. It can be customizedto meet the specific requirements of each individual, taking into account factors such as body size, weight, range of motion, and desired level of functionality. The leg can be fitted with various modular components, such as different foot designs, ankle joints, and knee mechanisms, to optimize performance for different activities, environments, and user preferences.In terms of mobility, the robotic leg provides a wide range of motion, enabling users to perform tasks such as walking, running, climbing stairs, and navigating uneven terrain. Advanced sensors and actuators allow for precise control of joint angles and limb movements, ensuring smooth and coordinated gait patterns. The microprocessor-based control system processes real-time data from the sensors to adjust the leg's behavior and compensate for variations in user input and environmental conditions.Another crucial aspect of the robotic leg is its stability and support. It is designed to provide a secure base of support during static and dynamic activities. The leg's structure and control system work together tomaintain balance and prevent falls, even on challenging surfaces. The system also incorporates advanced algorithms that enable the leg to automatically adjust its stiffness and damping properties, ensuring optimal stability and comfort for the user.Furthermore, the robotic leg incorporates advanced safety features to minimize the risk of injury to the user. These features include built-in sensors that detect potential hazards, such as obstacles or uneven terrain. The control system can respond quickly to these hazards by adjusting the leg's movements or triggering alarms to alert the user.To enhance user comfort and usability, the robotic leg is equipped with a user-friendly interface. This interface allows users to easily adjust settings, such as walking speed, stride length, and joint stiffness, to suit their preferences and activity level. The interface also provides real-time feedback on the leg's performance, including battery life, gait analysis, and error messages.In conclusion, the versatile robotic leg represents a significant advancement in the field of prosthetics and rehabilitation. It offers exceptional adaptability, mobility, stability, support, and safety, empowering individuals to regain their independence and improve their quality of life. As technology continues to evolve, the capabilities and applications of robotic legs are expected to expand further, opening up new possibilities for individuals with mobility impairments.中文回答:多功能机械腿是一种高度先进的机电一体化系统,它结合了机械、电气和计算机工程技术,为天然人腿创造了一种功能性强、适应性强的替代品。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章绪论1.1研究背景我国已经进入老龄化社会,老龄化问题逐渐得到关注。
《2009年度中国老龄事业发展统计公报》称,2009年我国60岁及以上老年人口己达到1.6714亿,占总人口的12.5%;到2015年我国60岁及以上老年人口将达到2.16亿,约占总人口的16.7%。
在老龄人群中有大量的脑血管疾病或者神经系统疾病患者,其中以脑卒中患者居多,而这类患者多数会留下偏瘫等症状。
另外,近十年来我国各类交通运输工具的保有量迅速增长,因交通事故造成身体损伤的人数每年超过30万人。
据统计,我国目前有8296万残疾人,有康复需求的接近5000万,每年因车祸、疾病等原因新增的残疾人数量达100多万。
医学理论和临床医学证明,这类患者除了早期的手术治疗和必要的药物治疗外,正确的、科学的康复训练对于肢体运动功能的恢复和提高起到非常重要的作用。
由于脑的可塑性,医学上通常是通过重复的、特定任务的训练让患者进行足够的重复性活动,从而使重组中的大脑皮质通过深刻的体验来学习和储存正确的运动模式。
减重活动平板步行训练的治疗方法就是基于上述原理对患者进行训练并且取得了良好的临床效果,成为下肢康复医疗采用的主要方法。
训练采用悬吊式减重器和活动平板(医用跑步机)配合工作来协助患者完成步行动作。
其悬吊装置可以不同程度地减少患者上身体重对下肢的负荷,患者在康复治疗师的帮助下借助于运动平板进行康复训练。
训练过程中一般需要两名治疗师相互协调,一名治疗师在患者侧面帮助并促进患者侧下肢摆动,确定脚跟先着地,防止出现膝关节过伸,保证两腿站立时间与步长对称;另一名治疗师站在患者身后,促进重心转移至负重腿上,保证骸屈伸、骨盆旋转和躯干直立。
减重步行训练可以获得较为理想的肢体功能恢复效果,但是这种治疗师对患者“手把手”式的训练方式存在一些问题。
首先,一名患者需要两名治疗师进行运动训练,效率低下,并且由于治疗师自身的原因,可能无法保证患者得到足够的训练强度,而且治疗效果会受到治疗师自身经验和水平的影响。
其次,不能精确控制和记录训练参数(运动速度、轨迹、强度等),不利于治疗方案的确定和改进;不能记录描述康复进程的各种数据,康复评价指标不够客观;无法建立训练参数和康复指标之间的对应关系,不利于对患者神经康复规律进行深入研究。
再有,不能向患者提供实时直观的反馈信息,训练过程缺乏吸引力,患者多为被动接受治疗,参与治疗的主动性不够。
可以看出,单纯依靠治疗师进行康复训练,无疑会制约康复训练效率的提高和方法的改进。
因此,开拓更加广泛的康复训练手段和进一步提高康复效率是解决患者运动功能障碍的当务之急。
而突破这个问题的关键在于科学技术的创新,下肢康复机器人技术的发展和运用解决了这个问题。
首先,机器人不存在“疲倦”的问题,能够满足不同患者对训练强度的要求;其次,机器人可以将治疗师从繁重的训练任务中解放出来,而专注于制定治疗方案、分析训练数据、优化训练内容并改进机器人的功能;再次,机器人可以客观记录训练过程中患者患肢的位置、方向、速度以及肌力恢复状态等客观数据,供治疗师分析,以评价治疗效果;更进一步,机器人所记录下的详细数据,使得治疗师有可能从中发现数据与治疗结果之间的对应关系,从而有可能深入了解中枢神经康复的规律;还有,使用机器人技术可以通过多媒体技术为患者提供丰富多彩的训练内容,使患者能够积极参与治疗,树立康复信心,并及时得到治疗效果的反馈信息;最后,机器人治疗技术使得远程治疗和集中治疗(一名治疗师同时为几名患者提供指导)成为可能,通过将成熟的产品推广应用,最终使所有的患者受益。
1.2下肢康复机器人概况康复机器人是康复医学和机器人技术的完美结合,人们不再把机器人当作辅助患者的工具,而是把机器人和计算机当作提高临床康复效率的新型治疗工具。
下肢康复机器人是目前康复机器人研究领域的一个主要研究对象。
它主要用于辅助患有脑血管疾病或神经系统疾病的患者进行下肢的康复训练,帮助他们重获步行能力。
它可以在专业的医疗机构甚至在家中使用,使患者获得更强的独立生活能力,并能相当大的提高他们的生活质量。
在过去的几年中,下肢康复机器人在世界各国己经有了很大的发展并取得了相当多的成果,一些企业在其技术开发及投资方面有了很大的投入,下肢康复机器人技术正在向产业化和普及化发展。
1.2.1康复机器人研究历史第一次尝试把为残疾人服务的机器人系统产品化是在20世纪的60年代到70年代,实践证明这些尝试都失败了。
失效原因主要有2个方面:其一是设计的不理想,尤其是人机接口;另一个不是技术的原因,而是因为单价太高导致了康复机器人产品化的失败。
20世纪80年代是康复机器人研究的起步阶段,美国、荷兰和瑞士在康复机器人方面的研究处于世界领先地位。
90年代以来,全世界己有超过20所大学的实验室及康复医疗机构相继开展了基于机电结合机器人技术的下肢康复训练系统的研制和实验研究工作。
首先在机械手方面取得了一定的成就。
1993年,Lum P. S.等研制了一种称作“手-物体-手”的系统(hand-object-hand system),如图1-1左图,用来对一只手功能受损的患者进行康复训练。
这种双手物理治疗辅助机器包括两个置于桌面上可绕转轴转动的夹板状手柄,其中一个手柄下端连接在驱动电机上,电机可以辅助患者完成动作。
1995年,Lum P. S.等又研制了一种双手上举的康复器(bimanual lifting rehabilitator),如图1-1右图,用来训练患者用双手将物体举起这一动作。
该设备为两自由度连杆结构,当患者双手握住手柄将其举起时,设备既可测量被举物体的垂直位置及倾斜角度参数,也可以在左手(患侧手)无法产生足够大的力时予以辅助,机器所施加的力可以按患者的需要改变,从而保持上举动作的平衡。
图1-1 手-物体-手训练系统目前康复机器人技术有了较大的发展,从技术上能够较好地满足各种残障人士和老年人的需要,但是在实用能力上还需要进一步完善和提高。
1.2.2下肢康复机器人分类(1)牵引型下肢康复训练机器人系统主要由减重装置和数个牵引机器人组成,机器人操作端分别与患肢的膝、踩部柔性连接。
康复训练的过程是患者经吊带减重后,由机器人牵引患肢的连接部位按预期的操作端轨迹进行康复训练运动。
典型的牵引型下肢康复机器人系统有美国Health-S outh公司研制的Auto-Ambulato:系统和美国加州大学洛杉矶分校研制的ARMS系统等,其中Auto-Ambulator系统的牵引机器人数目为2个,ARMS系统的牵引机器人数目为4个。
牵引型下肢康复机器人系统可根据康复训练需要对系统进行重组,并具有牵引运动形式多样、对患肢的适应性较强等优点,但其机械及控制系统的组成相对复杂,国内未见有相关研究的报导。
(2)运动踏板型下肢康复训练系统主要由减重装置和一对运动踏板组成,康复训练的过程是患者经吊带减重后,双足与运动踏板保持接触,运动踏板根据预先规划的轨迹运动,在患者自重(体重与减重量差值)与运动踏板推力共同作用下进行患肢的康复训练运动。
典型的运动踏板型康复训练系统有德国Fraunhofer研究所与柏林自由大学研制的Haptic-Walker系统、Mechanized Gait Trainer系统和口本Tsukuba大学研制的Gait-Maste:系统等。
其中,Haptic-Walker和Gait-Master为多自由度运动踏板训练系统,Mechanized Gait Traine:为单自由度(每个踏板)运动踏板训练系统。
国内从事运动踏板型康复训练系统研究的机构主要有清华大学和哈尔滨工程大学,并研制出具有单、多自由度的卧式及立式运动踏板训练系统。
多自由度运动踏板训练系统对患肢不同的训练需求具有较强的适用性,可以模拟正常的下肢运动步态和脚踩运动位姿,还能够根据训练需要灵活调整、设计踏板的运动规律。
(3)穿戴型下肢康复训练机器人系统由减重装置、运动平板以及与支撑装置相连的穿戴型下肢康复机器人(外骨骼)组成。
康复训练的过程是患者穿戴下肢康复机器人并经吊带减重后,机器人根据预先规划的运动规律和控制策略,导引患者下肢协同运动进行康复训练。
同时患者的双足依次与运动平板相接触,在运动平板的带动下进行踩关节的康复训练。
穿戴型下肢康复机器人系统既能进行下肢的被动康复训练,也可以对下肢进行主动康复训练。
对于手术恢复期后以及因偏瘫导致运动功能损伤严重的患者,可先经吊带减重后由下肢康复机器人导引患肢进行被动康复训练,逐步恢复患肢关节的运动功能和肌肉组织的伸展功能。
当患肢的运动功能恢复到一定程度后,根据功能恢复状况可适当降低下肢康复机器人的驱动功率,由患肢与机器人驱动器共同承担机器人机构的负载并协同运动,实现患肢的主动康复运动训练。
1.3下肢康复机器人的研究现状康复机器人技术在欧美等发达国家得到了科研工作者和医疗机构的普遍重视,许多研究机构都开展了有关的研究工作,近年来取得了一些有价值的成果。
我国对康复机器人的研究起步比较晚,辅助型康复机器人的研究成果相对较多,康复训练机器人方面的研究成果则比较少。
1.3.1国外研究现状瑞士HOCOMA医疗器械公司与瑞士苏黎士Balgrist医学院康复中心合作推出的LOKOMAT步行康复训练机器人是当今产业化程度最高的一种面向下肢瘫痪患者的医疗康复器械。
LOKOMAT于1999年研制成功,2001年在汉诺威世界工业展览会上展出,并在随后的几年中口臻完善并且己经开始进入实际应用阶段。
LOKOMAT根据瘫痪患者康复训练的特点,将下肢外骨骼设计成骸关节和膝关节两个自由度,分别由驱动器控制直流伺服电机进行运动。
关节的角度、电机的输出力矩、患者与外骨骼之间的接触力均由相应的传感器进行测量。
整个LOKOMAT系统通过一个平行四边形连杆机构与跑步机及悬吊系统相连接,稳固可靠。
训练时,患者的下肢通过六个绑带与LOKOMAT相连,最基本的被动训练只需控制四个关节的角度和角速度,以带动患者模仿人体步行运动。
为了适应不同患者的需要,该机器人的各个关节均可调整,如图1-2所示。
为了让患者感到舒适,所有与患者接触的绑带都是宽而软的。
LOKOMAT的优点是:①患者的训练状态能够被监测、评价和引导;②能够根据患者个体不同提供相应的步态模式和训练方案;③能够通过虚拟现实技术为患者提供反馈以提高患者参与训练的主动性。
图1-2 LOKOMAT机械腿LOPES(Lowerextremi typowered Exoskeleton)也是一套主动医疗康复外骨骼,如图1-3所示。
它的设计初衷与LOKOMAT一样,是面向于下肢活动能力受损的心脑血管或神经疾病患者。
所不同的是,LOPES更加关注于所开发的机电系统与患者的兼容性和患者穿戴外骨骼训练时的舒适性。