第七章 典型光学系统及其像质评价
光学系统成像质量评价

第九节 光学传递函数 第十节 用光学传递函数评价系统的像质
上一页 下一页 返回
第一节 概述
成像质量评价的方法: 成像质量评价的方法:
1、用于在光学系统实际制造完成后对其进行实际测量。 用于在光学系统实际制造完成后对其进行实际测量。 分辨率检验 星点检验 用于在光学系统还没制造出来, 2、用于在光学系统还没制造出来,即在设计阶段通过计算就能评定 系统质量。 系统质量。
上一页
下一页
返回
第二节 介质的色散和光学系统的色差
某一种介质对两种不同颜色光线的折射率之差称为该介质对这两种颜色 光的色散。 光的色散。 不同颜色光线的像点沿光轴方向的位置之差称为轴向色差 分别表示F 两种波长光线的近轴像距,则轴向色差为: 若用 lF ', lC '分别表示F,C两种波长光线的近轴像距,则轴向色差为:
1500 N= F
三、显微镜物镜分辨率: 显微镜物镜分辨率:
在显微镜系统中,物体位在近距离,一般以物平面上刚能分开两物体 在显微镜系统中,物体位在近距离, 间的最短距离σ 间的最短距离σ表示
σ=
0.61λ 0.61λ = nu NA
上一页 下一页 返回
第九节 光学传递函数
一种对设计和使用都适用的统一的像质评价指标 图像分解与合成的概念 像面与物面对比之比称为对指定空间频率μ的对比传递因子, 像面与物面对比之比称为对指定空间频率μ的对比传递因子,用 MTFμ表示 表示。 MTFμ表示。称为振幅传递因子
δ L ' = L ' l '
上一页 下一页 返回
第四节 轴外像点的单色相差
如图所示,主光线和光轴决定的平面,称为子午面, 如图所示,主光线和光轴决定的平面,称为子午面,过主光线与子午 面垂直的平面,称为弧矢面。 面垂直的平面,称为弧矢面。
光学系统像质评价方法

光学系统像质评价方法那最直观的一种呢,就是星点检验法。
这就像是拿个小镜子去照星星,看星星在镜子里的成像情况。
如果成像清晰,像个完美的小亮点,那就说明这个光学系统还不错呢。
要是星星的像看起来模模糊糊的,或者周围有奇怪的光晕之类的,那这个光学系统可能就有点小毛病啦。
这就好比一个人脸上有脏东西,一眼就能看出来,很直接的一种判断方式哦。
还有分辨率检验法。
你可以想象成看一幅超级复杂的画,画里有好多密密麻麻的线条和小图案。
如果光学系统好,那这些小细节就能看得清清楚楚的,就像你有一双超级锐利的眼睛。
要是分辨率不行呢,那些小线条就会糊成一团,就像近视眼没戴眼镜看东西一样。
这能反映出光学系统分辨微小物体的能力呢。
调制传递函数(MTF)法也很厉害哦。
这个有点像给光学系统打分啦。
它能告诉我们这个系统在不同空间频率下的成像质量。
简单说呢,就像是看这个光学系统在处理简单图案和复杂图案时的表现。
如果MTF的值比较高,那就说明这个光学系统在传递图像信息的时候很靠谱,就像一个很负责的快递员,能把包裹完好无损地送到目的地。
要是MTF值低,那图像的信息可能在传递过程中就丢三落四的啦。
波像差法也不能少呀。
它是从波前的角度来看待像质的。
就好比看水面上的波浪,如果波浪很规则,那成像就会好。
要是波浪乱七八糟的,那像质肯定就受影响啦。
这个方法就像是从根源上去找像质不好的原因,看是哪个环节让波前变得不那么听话了。
像差曲线法呢,就像是给光学系统的像差画个像。
通过这个曲线,我们能很清楚地看到像差是怎么分布的。
就像给光学系统做个体检报告,哪里有问题,从曲线里就能看个大概。
工程光学第七章典型光学系统

①透射光亮视场照明。光通过透明物体产生亮视场。 ②反射光亮视场照明。对不透明的物体,从上面照射产生漫射或规 则的反射形成亮视场。 ③透射光暗视场照明。倾斜入射的照明光束在物体旁侧向通过,光 束通过物体结构的衍射、折射和反射,射向物镜,形成物体的像, 则获得暗视场。 ④反射光暗视场照明。在旁侧入射到物体上的照明光束经反射后在 物镜侧向通过,若无缺陷的放射镜作为物体,得到一均匀暗视2场2 。
距离
距离
R为远点视度,P为近点视度,单位为屈光度(D)=1/m。 医学上, 1D=100度。 随着年龄增大,肌肉调节能力下降,调节范围减小。
(二)眼的缺陷及校正
眼睛的远点在无限远或眼光学系统的后焦点在视网膜上,称
为正常眼。
正常眼观察近物时,物体距眼最适宜的距离是250mm,称
为明视距离M。
4
①近视眼 近视眼的网膜离水晶体太远或水晶体表面曲率太大,无限 远物点成像在网膜之前,远点在眼前有限远。 需配一负光角度凹面透镜,透镜的像方焦点与眼睛的远点 重合,这样,无限远物点就能成像在网膜上。
大小应与目 500tgw 6,8,11,16,22,32。 镜的视场角 250 D ②成实像的眼睛、摄影和投影系统。
f e
e
一致: e
2 y 5 0 0tg w e
5 0 0tg w
表明:在选定目镜后,显微镜的视觉放大率越大,其在物
空间的线视场越小。
18
三、显微镜的出瞳直径 普通显微镜,物镜框是孔径光阑。 复杂物镜,其最后镜组的镜框为孔径光阑。 测量用显微镜,物镜像方焦平面上设置专门的孔径光阑, 经目镜所成的像为出瞳(直径为D‘)。 则有: n ysinun ysinu nsinuyn sinu y n sinu fo
工程光学第七章 典型光学系统(2013总第13讲)
第八节
波像差
从物点发出的波面经理想光学系统后,其出射波面应是球面,而实际 波面与其存在一定偏差。当实际波面与理想波面在出瞳处相切时,两波面 间的光程差即波像差。 波像差也是孔径的函数,几何像差越大波像差也越大。对轴上物点, 单色光的波像差与球差有如下关系:
n' W 2
0
Um
'
L du
'
'2
波像差越小系统的成像质量也越好。瑞利判断法认为,光学系统
正弦差仅适用于小视场,而彗差可用于任何视场。
计算正弦差时,在计算球差的基础上,只需计算一条“第二近轴光 线”;彗差必须对每一视场计算相对主光线对称入射的上、下两条光线。
第五节
像散和场曲
一、像散:用子午细光束焦点和弧矢细光束焦点投影到光轴上的间距表示 轴外点发出的宽光束经单个折射球面存在彗差。若将光阑缩到无限小,则入 射光线为无限细光束,此时出射光线交于一点,彗差不存在,但存在像散和场曲。 存在像散时,平面物在像方会形成子午像面和弧矢像面,均为对称于光轴的 旋转曲面,相切于理想像面与光轴的交点。无像散时,子午像面和弧矢像面重合。 像散的校正:使某一视场(一般是0.7视场)的像散值为零,但其它视场仍 有剩余像差存在。对单个折射,没有正弦差的物点位置(齐明点)和光阑位置 (光阑在球心)也不存在像散。消像散系统一般由正、负透镜适当组合而成。 二、场曲:垂直于光轴的物平面经光学系统后成像在以光轴为对称的弯曲表面。 场曲的校正通常是对细光束而言,方法与球差校正方法类似。像散和场曲同 时矫正的匹兹伐条件:将镜头使用的单镜片数,加在各单镜片的折射率乘以焦点 距离的积的倒数上,它的和最好等于零,这个和叫做匹兹伐和数。
第二节 光线的光路计算
对有特征意义的光线进行光路计算,比较理想光学系统成像情况与实际光 线成像特性,研究不同视场的物点对应不同孔径和不同色光的像差值。
(光学测量技术)第7章光学系统像质检验与评价

第7章 光学系统像质检验与评价
一、 检验光学系统的共轴性 检验前,应调节待测系统光轴与平行光管光轴准确一致。 在此基础上,用白光照明,如果所观察到的衍射环不同心, 或同一环上光能分布不一致,或颜色不一样,则表明待测系 统的共轴性遭到破坏。共轴性检验在多组分离物镜的装配过 程中使用最多,也非常重要,由此可将各组间的光轴调到严 格同轴。
为了便于观察,一般取人眼的分辨角 α =2 ' ~4 ' ,代入上式 则有
当显微镜的数值孔径选定后,其垂轴放大率 β 也就确定 了。因此,只要合理选择目镜的放大率,即可满足显微镜总 放大倍率的要求。
第7章 光学系统像质检验与评价
三、 前置镜参数的选择 若对望远系统或其它平面光学元件做星点检验,则应采 用前置镜进行放大观察。对前置镜除要求像质好外,还应使 其入瞳直径大于待测系统出瞳直径,放大率满足人眼分辨星 点像细节的要求。第一、二衍射亮环经待测望远系统后的角 距离 Δ θ' =Δ θΓ =1.044 λ / D' 。显然,前置镜放大率应为
第7章 光学系统像质检验与评价 上式所代表的几何图形及各量物理意义如图 7.1 所示。
图 7.1 衍射受限系统参量与艾里班光强分布
第7章 光学系统像质检验与评价
艾里斑是由中央亮斑及若干亮度迅速减弱的同心外环组 成的。艾里斑各极值点的相关数据见表 7-1 。
第7章 光学系统像质检验与评价
计算表明,理想星点像的光强分布不仅是轴对称的,而 且最佳像面前、后对称截面上,其星点衍射像的光强分布也 是对称的。
第7章 光学系统像质检验与评价 7. 1. 2 星点检验装置
对于透镜型的光学系统或零件,星点检验的装置主要由 焦面上装有星孔光阑的平行光管和观察显微镜组成,如图 7. 2 所示。
07 光学系统成像质量评价

引言
如果光学系统成像符合理想,则各种几何像差都等于零, 由同一物点发出的全部光线均聚交于理想像点。根据光线和 波面的对应关系,光线是波面的法线,波面为与所有光线垂 直的曲面。在理想成像的情况下,对应的波面应该是一个以
理想像点为中心的球面——理想波面。
如果光学系统成像不符合理想,存在几何像差,则对应的 波面也不再是一个以理想像点为中心的球面。
二、中心点亮度
光线是传输能量 的几何线,这些几何 线的交点应该是一个 既没有体积也没有面 积的几何点。但是, 在像面上实际得到的
是一个具有一定面积
的光斑
二、中心点亮度
中心点亮度则是依据光学系统存在像差时,其成像衍射斑
的中心亮度和不存在像差时衍射斑的中心亮度之比来表示 光学系统的成像质量的,此比值用S.D来表示,当 S.D>=0.8时,认为光学系统的成像质量是完善的,这就是 有名的斯托列尔(K.Strehl)准则。
四、点列图 点列图特点
大量光路计算,只有利用计算机完成;
形象直观的评价方法; 应用于大像差的照相物镜等设计中;
五、光学传递函数
所谓MTF是表示各种不同频率的正弦强度分布函数
经光学系统成像后,其对比度(即振幅)的衰减程度
当某一频率的对比度下降到零时,说明该频率的光强 分布已无亮度变化,即该频率被截止。这是利用光学 传递函数来评价光学系统成像质量的主要方法。
光线条数越多,像面上的点子数就越多 ,越能精确地反映出
像面上的光强度分布情况。实验表明,在大像差光学系统中 ,用几何光线追迹所确定的光能分布与实际成像情况的光强 度分布是相当符合的。
四、点列图
对轴外物点发出的光束,当存在拦光时,只追迹通光面积内
光学系统像质评价 [自动保存]
![光学系统像质评价 [自动保存]](https://img.taocdn.com/s3/m/cd0415ccc1c708a1284a4478.png)
xts xt xs
细光束像散曲线
轴外像点的单色像差
实际光学系统所成的像即使子午像差和弧矢像差都为零,但对应的 像高并不一定和理想像高一致,这种像对物的变形像差称为畸变。
' ' ' ' ' ' Ao Bp ( yz ) 是光束的实际像高,Ao Bo ( yo ) 是理想像高,两者之差即 为畸变
光学传递函数的评价方法
• 用MTF曲线评价成像质量(所有频率) • 用特征频率传递函数值评价光学系统的质量(根据光 学系统使用目的)
• 用MTF阈值进行成像质量评价(分辨率)
• 用MTF曲线的积分值来评价成像质量(中心点亮度) • 用MTF曲线族来进行成像质量评价(焦深)
光学特性参数
孔径光阑或入瞳位置
它是限制轴上物点成像光束立体角(锥角)的光阑
入瞳的位置用从第一面顶点到入瞳面的距离lz表示,符 号规则同样是向右为正,向左为负
光学特性参数
渐晕
由于轴外点成像光束部分被遮挡,造成像的边缘部分亮度比像平 面中心暗,这种现象叫渐晕。
入窗
入瞳
O
A1
A2
A3
像差
实际成像的典型表现是,一个物点发出的光束经光学系统后不能聚焦成 一点而形成弥散斑,垂轴平面的物体也不可能成理想的垂轴平面像而发 生像面弯曲,同时物体成像还会产生变形,此外,还有不同波长光源之 间的成像差异。 实际像与理想像的差异称为像差。 像差包括:球差、彗差、像散、场曲、畸变和色差。其中,前五种是单 色像差,色差分为垂轴色差和位置色光学特性
成像质量
焦距、物距、像距、放大率、 入瞳位置、入瞳距离等
光学系统所包含的像应该足 够清晰,并且物像相似,变 形要小
工程光学第7章典型光学系统
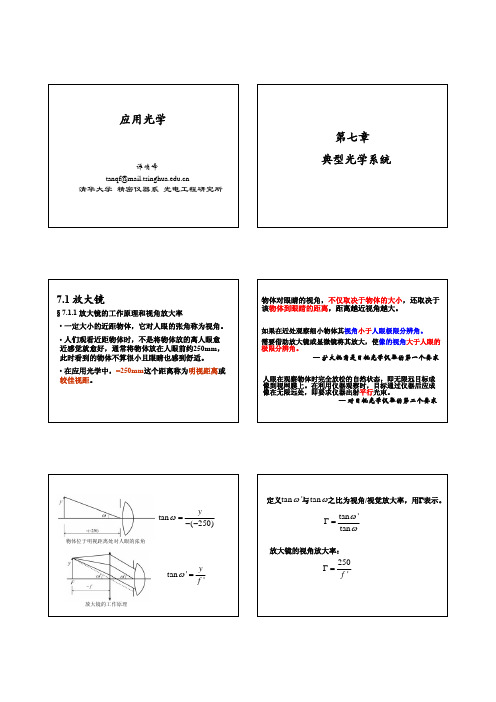
物体位于明视距离处对人眼的张角放大镜的工作原理250mm,r=−两块密接透镜构成的放大镜显微镜物镜物平面到像平面的距离称为共轭距。
各国生产的通用显微物镜的共轭距离大约为190mm 左右。
我国适用于远视眼的视度调节适用于近视眼的视度调节F eF F eF满足齐焦要求:调换物镜后,不需再调焦就能看到像——物镜共轭距不变加反射棱镜、平行平板镜的焦面上,然后通过目镜成像在无限远供人眼观察。
无限筒长显微镜:被观察物体通过物镜以后,成在无限远,在物镜的后面,另有一固定不变的镜筒透镜(我国规定焦距250mm),再把像成在目镜的焦面上。
7.3 望远镜§7.3.1 望远镜的工作原理望远镜系统的结构望远镜中的轴外光束走向'tan 'o y f ω=−视角放大率:'tan 'f ω望远镜系统中平行于光轴的光线(a)开普勒望远镜系统和(b)伽利略望远镜系统(a)(b)两类望远镜系统中的轴外光束走向开普勒式望远系统加入场镜的系统=1:2.8照相镜头可变光圈孔径光阑探测器视场光阑−UU′聚光镜显微物镜光源物面孔径光阑孔径光阑可变,调节进入显微物镜的能量,调节入射至显微物镜的光束孔径角,与显微物镜的数值孔径相匹配。
其缺点是光源亮度的不均匀性将直接反映在物面上。
双目望远镜系统望远镜系统简化出瞳距望远镜系统简化'30mmD D =Γ=''tan 8mmo y f ω=−='5mmD =光阑位置D 物D 分D 目l z '01.22d λ=艾里斑Airy disk2)实验系统相同,所用光波波长愈短则艾里斑愈小;U ′刚能分辩的两个像点min0.15≈角距离时人眼还2mm视觉细胞的直径,约5μm U′显微物镜的分辨率'σβσ=显微镜的几何景深2''x u δ≈Δ⋅弥散斑。
应用光学第七章理想光学系统的分辨率
三 消色差
– 单色光的色差无法消除; – 将两个不同材料做成的正透镜和负透镜胶合起来,可
对选定的两种波长消色差; – 用相同材料做成的两个薄透镜组合起来,并且使其间
距等于:
d f1 f2 2
可对某波长附近的光消垂轴色差。
问题:反射式光学系统有无色差存在?
球差
• 定义
轴上点A发出的某孔径带的光线与近轴光线交于不同 点,形成球差
(2) 其形状为:
B
KT
BT
彗差的危害:把物面上的轴外点成象为彗星状的弥散斑, 破坏了轴外视场的成象清晰度。因此,光学系统必须对 彗差进行校正。
(5) 弧矢彗差
弧矢慧差
K S
B
•
A
B S
dz
c
B
B z
B c
B d
彗差图形
• 讨论 1)物点离光轴越远,彗差越大 2)对给定的离轴物点,成像光束愈大,彗差愈大 3)与透镜的形状和物点的轴向位置有关
可见:边缘光的球差近似为零,其他带的光线都有 剩余球差存在的
彗差
入射光瞳
a
A
z
子午慧差
KT 0 B
Y z
•
BT Y a
b
辅轴
Y b
B 折射前主光束是光束的轴线
折射K后T主光12束(Y不a再Y是b)光束Yz的 轴线
由上可见:对于同一视场,不同的孔径,慧差也不同. 结论 (1) 慧差是和视场及孔径都有关的一种垂轴象差。
应用光学
Applied Optics
像差与像质评价
➢理想光学系统的分辨率
1、光学系统成像:
n -u A
2、衍射成像:
n’
umax’
07光学系统成像质量评价

07光学系统成像质量评价光学系统成像质量评价是指对光学系统的成像效果进行客观评估和定量描述。
光学系统成像质量是指光学系统对物体的成像能力,即像质的好坏。
好的光学系统成像质量表现为高分辨率、高对比度、低像差等特点。
成像质量评价主要包括分辨力评价、像差评价和对比度评价等。
分辨力是评价光学系统成像质量的重要指标之一、它是指能够分辨清晰的最小细节的能力。
分辨力的大小与光学系统的光学特性、入射光的波长、传感器的像素大小等有关。
常用的分辨力评价方法有MTF (Modulation Transfer Function)方法和空间频率方法。
MTF是光学系统传递像差的度量,通过测量光系统对一定空间频率的输入信号的传输量来表示光学系统对物体微细特征的分辨能力。
空间频率方法则是通过分析物体不同空间频率成分的能量来评价分辨能力。
像差评价是针对光学系统中各种像差对成像质量的影响进行评价。
光学系统中常见的像差包括球差、散光、像散、畸变等。
球差是由于球面透镜成像能力不完全而产生的像差,它导致透镜焦距与入射光位置有关。
散光是由于透镜折射率随距离而变化引起的像差,散光会导致成像点模糊。
像散是在光学系统中,不同波长的光会聚焦在不同位置形成不同的像点,从而导致色差。
畸变则是指光学系统成像时物体真实尺寸与其等效尺寸之间的变化。
像差评价的方法很多,包括通过测试物体进行目测、使用CCD 相机进行像差测量等。
对比度评价是用来描述光学系统成像能力的指标之一、对比度是指在光学系统中被成像物体的亮度差异。
对比度的好坏会直接影响到物体的细节清晰度和图像的视觉效果。
对比度评价的方法多样,可以通过测量物体亮度的标准差、计算图像的峰值信噪比等方法来评价对比度。
总之,光学系统成像质量评价可以通过分辨力评价、像差评价和对比度评价等方法来进行。
这些方法可以客观地评估光学系统成像质量的好坏,为光学系统设计和优化提供依据。
光学系统的像质评定方法研究
光学系统的像质评定方法研究摘要:光学系统的像质评定是对光学系统成像能力的客观评价,对于确保光学系统的图像质量具有重要意义。
本文基于光学系统的像质评定方法展开研究,旨在提供一种准确、严谨的评定方法。
引言:光学系统是一种基于光学原理实现图像采集、传输和显示的设备,广泛应用于各个领域,如摄影、医学影像、遥感等。
而光学系统的像质评定则是衡量光学系统成像能力的重要指标,对于保证图像质量具有重要意义。
一、光学系统的像质评定方法的研究背景光学系统的像质评定方法的研究是为了解决光学系统成像能力评价的问题。
在光学系统的设计、制造和应用过程中,需要对其成像能力进行准确的评估,以确保所得图像满足实际需求。
因此,光学系统的像质评定方法的研究具有重要的理论和实践意义。
二、光学系统的像质评定方法的研究内容1.像质评价指标的选择:在光学系统的像质评定中,需要选择合适的评价指标来衡量图像的质量。
常用的评价指标包括分辨率、畸变、色散、像场平直度等。
这些指标能够客观地反映光学系统的成像能力,为光学系统的性能评估提供依据。
2.光学系统的像质评定方法的研究:为了实现对光学系统成像能力的准确评定,需要建立相应的评定方法。
常用的方法包括实验测量方法、数值计算方法和仿真模拟方法。
这些方法可以针对不同类型的光学系统,从不同角度对其成像能力进行评价。
3.实验装置的设计与搭建:在光学系统的像质评定过程中,需要设计和搭建相应的实验装置。
这些实验装置可以模拟实际应用场景,对光学系统的成像能力进行测试。
同时,实验装置的设计还需要考虑实验的可重复性和准确性。
4.数据处理与分析:在光学系统的像质评定中,需要对实验数据进行处理和分析。
这包括对图像数据的处理、指标计算和统计分析等。
通过对数据的处理与分析,可以得到光学系统的像质评价结果,并进行比较和评估。
三、光学系统的像质评定方法的研究应用光学系统的像质评定方法的研究在实际应用中具有广泛的应用价值。
首先,光学系统的像质评定方法可以用于对光学系统的设计和制造进行质量控制,确保光学系统的成像能力满足要求。
第7章光学系统像质检验与评价
第7章光学系统像质检验与评价光学系统的像质是评价光学成像系统性能的重要指标之一、光学系统像质检验与评价是通过一系列测量和分析方法,对光学系统所形成的图像进行质量评估和优化,以达到最佳的成像效果。
本章将介绍光学系统像质检验与评价的基本概念和方法。
一、光学系统像质的基本要求光学系统的像质是指图像的清晰度、分辨率、畸变、色差等方面的特性。
图像清晰度是指图像的边缘清晰、细节丰富程度,可以通过分辨率、模点传递函数等指标来评价。
分辨率是指光学系统能够分辨的最小细节,常用线对应的最小细节来表示,分辨率越高,图像越清晰。
畸变是指由于光学系统的非线性特性引起的图像失真,可以通过畸变系数、畸变曲线来表示。
色差是指光学系统在成像过程中,不同色光的折射率不同导致的颜色偏差,可以通过色差曲线和色差评估指标来评价。
二、光学系统像质的测量方法光学系统像质的测量方法主要包括调制传递函数法、光学遥测法和图像质量评估等方法。
1.调制传递函数法调制传递函数(MTF)是评价光学系统分辨能力的重要指标。
MTF可以通过薄透镜法、扫描法和波前传递函数法等方法进行测量。
薄透镜法是通过在光学系统前后分别加上一个透镜,然后测量透过透镜后的光的幅度和相位变化,从而得到MTF曲线。
扫描法是通过在物平面上扫描一个细节图案,测量透过光学系统后的图案,然后计算出MTF。
波前传递函数法是通过测量光学系统的波前形状,然后计算出MTF。
2.光学遥测法光学遥测法是通过分析光学系统传感器接受到的光信号来评估图像质量。
常用的光学遥测法包括测量光学系统的信噪比、动态范围、饱和度、线性度等指标。
3.图像质量评估图像质量评估是通过对光学系统成像结果进行客观或主观评估,得出图像质量指标的方法。
常用的图像质量评估方法包括主观评估、客观评估和参数评估。
主观评估是通过人眼观察评价图像质量,客观评估是通过计算机分析图像的目标检测性能、峰值信噪比等指标来评价图像质量,参数评估是通过计算一些具体的图像质量指标,如均方根误差、结构相似性指标等来评价图像质量。
光学系统的像质评定方法研究
光学系统的像质评定方法研究摘要:光学系统的像质评定是评估光学系统成像效果的重要指标,具有广泛的应用价值。
本文主要研究了光学系统的像质评定方法,包括传统的评价指标和现代的评价方法。
通过对各种评价方法的比较和分析,提出了一种综合评价方法,以期能更准确地评估光学系统的像质。
关键词:光学系统;像质评定;评价指标;评价方法;综合评价一、引言光学系统的像质评定是评估光学系统成像效果的重要方法,对于提高光学系统的成像质量具有重要意义。
在科学研究、工业检测、医学影像等领域,光学系统的像质评定被广泛应用。
因此,研究光学系统的像质评定方法对于推动光学系统的发展具有重要意义。
二、传统的评价指标1. 分辨力:分辨力是评价光学系统像质的重要指标之一。
它能够反映光学系统成像的细节能力。
常用的分辨力评价指标有最小可分辨角、空间频率响应等。
2. 像场弯曲:像场弯曲是评价光学系统像质的另一个重要指标。
它能够反映光学系统在不同位置成像的一致性。
常用的像场弯曲评价指标有像场弯曲曲率和像场弯曲畸变等。
3. 像散:像散是评价光学系统像质的重要指标之一。
它能够反映光学系统成像时造成的色差。
常用的像散评价指标有长焦散、短焦散、色差曲线等。
三、现代的评价方法1. 主观评价:主观评价是通过人眼对成像质量进行评价的方法。
通过让观察者观察并评价光学系统成像的质量,可以得到相对准确的评估结果。
然而,主观评价存在主观性强、评价结果不稳定等问题。
2. 客观评价:客观评价是通过计算机算法对光学系统成像质量进行评价的方法。
常用的客观评价方法有模糊集方法、人工神经网络方法等。
这些方法能够提供相对客观、稳定的评价结果。
四、综合评价方法的提出综合评价方法是将传统的评价指标和现代的评价方法相结合,以期得到更准确的评价结果。
在综合评价方法中,可以根据实际应用需求确定不同评价指标的权重,并结合客观评价方法进行评价。
通过对各种评价结果的综合分析,可以得到更全面、准确的光学系统像质评定结果。
第七章 光学系统的像质评价和像差 应用光学教学课件
弧矢细光束场曲
两者间的轴向距离称为轴外弧矢球差
L'S XS' xs'
轴外球差:轴外物点发出的粗光束经系统后的交点与细光束的交 点的偏离,当视场不大时,轴外球差和轴上球差差不多相等
2.影响因素 与焦面位置和物体高度有关 与n有关 与光阑位置有关 3.消除方法 加光阑,可以减小单透镜场曲
例:照相物镜在负弯月透镜前加光阑 组合系统,复杂化系统,适当选择焦距和n 将探测器面弯曲以适应场曲
一 定义
轴上点A发出的某孔径带的光线与近轴光线交于不同点, 形成球差
球差-系统对轴上物点单色粗光束,成像时所产生的像 差
轴向球差 L'L'l' 垂轴球差 T'L'taun '
接收屏在空间沿着主光轴移动,接收到的弥散斑都是 圆形的,位置不同,弥散斑的直径也不同
二 与哪些因素有关?
1. L'是h、u的函数
①其它环带的问题
②高阶球差问题
§7.3 轴外点单色像差
一 子午面与弧矢面 子午面:物点发出的主光线和光轴所决定的平面,
子午面是折射前后光束的对称面 子午光线:位于子午面内的光线 弧矢面:通过主光线而
又垂直于子午面的平面 弧矢光线:弧矢面内
不交光轴的光线 对于轴外点发出的光束, 一般在整个光束中通过主 光线取出两个相互垂直的 截面进行分析
子午面光线经系统成像仍在子午面内
由于系统像差的存在, 对称于主光线两侧的”子午光线 对”, 经系统后,交点不在主光线上,也不交在理想像面上
a
弧矢彗差:前后光线经系统后的交点BS’到主光线 的垂直于光轴方向的距离, KS’
弧矢面光线的结构特点
由于系统像差的存在,对称于主光线两侧的”弧 矢光线对”,经系统后交点必然在子午面上,但不 在主光线上,也不在理想像面上
第7章 系统像质检验与评价
计算表明:星点像的光强度分布是轴对称的。
光学测量
7
第7章 系统像质评价
实际光学系统
由于实际光学系统存在像差或缺陷,从而 引起星点像变化或改变其光强度分布,故由 实际星点衍射像与艾里斑比较,即可灵敏地 反映出待检系统的缺陷并由此评价像质。
光学测量
8
第7章 系统像质评价
7.1.2 星点检验装置
一、星点检验装置:
f D
2、照相物镜:以像面上刚能分辨的两衍射斑中心距的倒 数(每毫米的线条数)N表示分辨率:
N 1
1 1.02F
3、显微系统:以物面处刚能分辨的两物点间距ε表示分辨 率: 1.02 0.51 2 NA NA 光学测量
28
第7章 系统像质评价
上式表明:当接收器确定时,光学系统的理论分辨率只与相对 孔径有关。因此,小像差系统实际分辨率与理论分辨率几乎一 致,当系统像差较大时,分辨率随之下降,所以分辨率适合于 大像差系统的像质指标。 二、三种光学系统不同判据表示的视场中心的理论分辨率:
6
第7章 系统像质评价
衍射爱里斑
光强度分布为艾里斑分布。 2 I 2 J1
I0
式中 =2 / h D / f r 此式所代表的参量如图7.1所示 当φ=0时 ,θ= 0 ,中央亮斑能量最高83.87% 当φ=1.22π时,θ=0,610λ/h ,参量为0,第一暗环。
NA≥sin(arctgD/2f′) Γ>(250~500)D/f
C 观察分辨率图案,直至刚能分辨某单元四个方向的线条像完全分 辨清楚,而下一单元像不能全分辨止。 D 根据该单元线条宽度b/μm,再根据平行光管的焦距fc′,得:
光学系统的像质评价 重点

第七章 光学系统的像质评价§7.1 瑞瑞瑞Reyleigh瑞瑞瑞瑞瑞瑞瑞瑞瑞一、瑞利判断瑞利判断是根据成像波面相对理想球面波的变形程度来判断光学系统的成像质量的。
瑞利认为“实际波面与参考球面波之间的最大波像差不超过时,此波面可看作是无缺陷的”,此判断称之为端利判断。
该判断提出了光学系统成像时所允许存在的最大波像差公差,即认为波像差时,光学系统的成像质量是良好的。
瑞利判断的优点是便于实际应用,因为波像差与几何像差之间的计算关系比较简单,只要利用几何光学中的光路计算得出几何像差曲线,由曲线图形积分便可方便地得到波像差,由所得到的波像差即可判断光学系统的成像质量优劣。
反之,由波像差和几何像差之间的关系,利用瑞利判断也可以得到几何像差的公差范围,这对实际光学系统的讨论更为有利。
瑞利判断虽然使用方便,但也存在不够严密之处。
因为它只考虑波像差的最大允许公差,而没有考虑缺陷部分在整个波面面积中所占的比重。
例如透镜中的小汽泡或表面划痕等,可能在某一局部会引起很大的波像差,按照瑞利判断,这是不允许的。
但在实际成像过程中,这种局部极小区域的缺陷,对光学系统的成像质量并非有明显的影响。
7-1瑞利判断是一种较为严格的像质评价方法,它主要适用于小像差光学系统,例如望远物镜、显微物镜、微缩物镜和制版物镜等对成像质量要求较高的系统。
二、中心点亮度瑞利判断是根据成像波面的变形程度来判断成像质量的,而中心点亮度则是依据光学系统存在像差时,其成像衍射斑的中心亮度和不存在像差时衍射斑的中心亮度之比来表示光学系统的成像质量的,此比值用来表示,当时,认为光学系统的成像质量是完善的,这就是有名的斯托列尔(K.Strehl)准则。
瑞利判断和中心点亮度是从不同角度提出来的像质评价方法,但研究表明,对一些常用的像差形式,当最大波像差为时,其中心点亮度约等于0.8,这说明上述二种评价成像质量的方法是一致的。
7-2斯托列尔准则同样是一种高质量的像质评价标准,它也只适用于小像差光学系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章典型光学系统及其像质评价
一、选择题
1、在用照相机拍摄景物时,要获得较大的景深,应该()
A、增大照相系统的入瞳直径 B.、将对准平面置于无穷远处
C、.选用长焦距镜头 D.、增大光圈数
2、对于照相系统,正确的陈述是()
A、焦距变大,可使像增大
B、光圈变大,可使像面照度增大
C、光圈变大,可使像面照度不均匀程度变大
D、相对孔径决定了照相系统的分辨率
3、照相系统的三个重要参数是()
A、视场角、分辨率和焦距
B、视场角、相对孔径和焦距
C、视场角、数值孔径和焦距
D、视场角、相对孔径和分辨率
4、拍摄人像艺术照,为突出主要人物,使背景模糊,应选用()
A、大焦距、小F数和小对准距离
B、大焦距、大F数和小对准距离
C、大焦距、大F数和大对准距离
D、小焦距、小F数和小对准距离
二、填空
1、人眼的物方焦距要比像方焦距();若某人的远点距离为眼后1m,则需要佩戴()度的老花镜,其焦距为()mm。
2、望远镜系统的光学结构特点是()和()。
使用伽利略望远镜观察物体时,孔径光阑是(),视场光阑是()。
由于该系统的入窗与物面不重合,所以观察大视场时一般存在()现象。
3、摄影物镜的三个重要参数是()、()和()。
其中()影响像面的照度和分辨率。
对摄影系统而言,焦距越长,景深越();入瞳直径越大,景深越();拍摄距离越远,景深越()。
4、在变焦距光学系统中,对像面移动进行补偿的方法主要有机械补偿法和()两种。
机械补偿法中,焦距的变化是通过()来实现的,其变倍比为()。
三、简答题
1、显微系统的组成和工作原理
2、摄影(照相)系统组成与成像原理
四、计算题
1、有一个显微镜系统,物镜的放大率为-25×,目镜的倍率为10×(均按薄透镜),物镜的共轭距为195mm。
求;
(1)系统的等效焦距和总倍率;
(2)物体的位置;
(3)物镜和目镜的焦距;
(4)光学筒长;
(5)物镜和目镜的间距;
2、一开普勒望远镜,物镜焦距f0ˊ=200mm,目镜焦距f eˊ=25mm,物方视场角2ω=80,渐晕系数K=50%,为了使目镜通光口径D=23.7mm,在物镜后焦面上放一场镜,试求:
(1)场镜焦距;
(2)若该场镜试平面在前的平凸薄透镜,折射率n=1.5,求其球面的曲率。