CAN-iCAN协议
ican协议

ican协议iCAN协议。
iCAN协议是一种用于Internet of Things(IoT)设备和服务之间相互通信的协议。
它是一种轻量级的协议,旨在简化设备之间的通信,并提供安全、可靠的连接。
iCAN协议的设计考虑了设备资源受限、网络不稳定以及安全性等因素,以确保设备之间的通信能够高效、稳定地进行。
iCAN协议的特点之一是其灵活性。
它可以在不同类型的网络和设备上运行,包括传统的有线网络、无线网络和低功耗设备。
这使得iCAN协议成为了一种通用的解决方案,可以适用于各种不同的IoT场景,如智能家居、智能城市、工业自动化等。
另一个重要的特点是iCAN协议的安全性。
在IoT设备中,安全性是至关重要的,因为这些设备可能涉及到用户的隐私信息或者对物理设施的控制。
iCAN协议采用了先进的加密算法和认证机制,以保护设备之间的通信安全,防止恶意攻击和数据泄露。
除了灵活性和安全性,iCAN协议还注重通信效率。
由于IoT设备通常具有资源受限的特点,传统的通信协议可能会带来较大的开销。
iCAN协议通过优化通信协议的设计,减少了通信过程中的数据传输量,降低了设备的能耗,从而延长了设备的使用寿命。
在实际应用中,iCAN协议已经被广泛应用于各种IoT场景中。
例如,在智能家居领域,iCAN协议可以实现智能灯泡、智能插座、智能门锁等设备之间的互联互通,实现智能家居的整体控制和管理。
在工业自动化领域,iCAN协议可以连接各种传感器、执行器和控制器,实现设备之间的协同工作,提高生产效率和质量。
总的来说,iCAN协议作为一种适用于IoT设备和服务的通信协议,具有灵活性、安全性和高效性的特点,已经在各种IoT场景中得到了广泛的应用。
随着IoT技术的不断发展,iCAN协议将继续发挥重要作用,推动IoT设备之间的互联互通,为人们的生活和工作带来更多的便利和效益。
ican协议和canopen
竭诚为您提供优质文档/双击可除ican协议和canopen篇一:•canopen协议讲解根据ds301的内容进行介绍1、can总线can标准报文2、canopen应用层协议canopen协议不针对某种特别的应用对象,具有较高的配置灵活性,高数据传输能力,较低的实现复杂度。
同时,canopen完全基于can标准报文格式,而无需扩展报文的支持,最多支持127个节点,并且协议开源。
一个标准的canopen节点(下图),在数据链路层之上,添加了应用层。
该应用层一般由软件实现,和控制算法共同运行在实时处理单元内。
一个标准的canopen节点canopen应用层协议细化了can总线协议中关于标识符的定义。
定义标准报文的11比特标识符中高4比特为功能码,后7比特为节点号,重命名为通讯对象标识符(cob-id)。
功能码将所有的报文分为7个优先级,按照优先级从高至低依次为:网络命令报文(nmt)同步报文(sync)紧急报文(emeRgency)时间戳(time)过程数据对象(pdo)服务数据对象(sdo)节点状态报文(nmterrcontrol)7位的节点号则表明canopen网络最多可支持127个节点共存(0号节点为主站)。
下表给出了各报文的cob-id范围。
nmt命令为最高优先级报文,由canopen主站发出,用以更改从节点的运行状态。
sync报文定期由canopen主站发出,所有的同步pdo根据sync报文发送。
emeRgency报文由出现紧急状态的从节点发出,任何具备紧急事件监控与处理能力的节点会接收并处理紧急报文。
time报文由canopen主站发出,用于同步所有从站的内部时钟。
pdo分为4对发送和接收pdo,每一个节点默认拥有4对发送pdo和接收pdo,用于过程数据的传递。
sdo分为发送sdo和接收sdo,用于读写对象字典。
mterrorcontrol报文由从节点发出,用以监测从节点的运行状态。
状态机canopen的每一个节点都维护了一个状态机。
《CAN协议规范》课件

2
增强版CAN协议的应用前景
增强版CAN协议将广泛应用于大数据传输、高速汽车网络和智能物联网等领域, 推动技术的创新和发展。
总结
CAN协议的优势和局限
CAN协议具有高效可靠的数据通信能力,但在大规模网络和高速传输方面存在一定的局限性。
CAN协议的发展历程
CAN协议经过多年的发展和演进,不断适应新的应用需求和技术挑战。
CAN接口物理层介绍
CAN接口通过线缆连接节点,物理层采用差分信号传 输,提供高速、抗干扰的数据通信。
CAN接口设计要点
在设计CAN接口时,需考虑接口与控制器的连接、信 号电平匹配Hale Waihona Puke 阻抗匹配等问题。CAN应用
CAN在汽车电子中的应用
CAN协议在汽车电子中广泛应用,如车身控制、车载通信、发动机管理和娱乐系统等领域。
CAN帧格式
1
CAN帧格式介绍
CAN帧由帧起始位、帧ID、数据域和校验位等组成,通过CAN协议进行数据传输。
2
标准帧和扩展帧
标准帧使用11位帧ID,扩展帧使用29位帧ID,根据应用需求选择合适的帧格式。
3
帧ID和帧长度
帧ID用于标识CAN帧的发送和接收对象,帧长度指定了数据域的长度。
CAN通信协议
CAN通信协议介绍
CAN通信协议定义了节点之间数据的传输方式,包括消息发送和接收的过程。
帧的发送和接收
节点在发送数据帧时,需要遵循特定的帧格式,并通过CAN总线进行广播或点对点传输。
错误处理机制
CAN协议提供了多种错误处理机制,如错误帧重传、错误状态报告和错误恢复等,以确保通 信的可靠性。
CAN硬件接口
CAN在工业控制中的应用
CAN协议在工业控制领域应用广泛,用于实现各种设备之间的实时数据通信和控制。
can总线通信协议标准

can总线通信协议标准
CAN总线通信协议是一种基于串行通信的控制器局域网协议,它可以在多个节点之间进行实时数据传输和通信。
CAN总线通信协议标准具有高效、可靠、实时、灵活、可扩展等特点,已成为许多领域的标配,如汽车、航空航天、工业控制、医疗设备等。
CAN总线通信协议标准由国际标准化组织(ISO)和国际电工委
员会(IEC)共同制定,目前最新的版本为ISO11898-1:2015,其中
包括了物理层、数据链路层和应用层三个部分。
物理层规定了CAN总线的物理特性和电气特性,数据链路层规定了CAN总线通信的帧格式、错误检测和纠正等内容,应用层规定了CAN总线的数据结构和功能,如消息、标识符、过滤器、时间戳等。
CAN总线通信协议标准的应用范围非常广泛,从传统的汽车电子控制系统到现代的智能家居、智能交通、智慧城市等领域都能看到它的身影。
随着物联网和工业4.0的发展,CAN总线通信协议标准将继续发挥重要作用,为各个领域的智能化发展提供支撑和保障。
- 1 -。
福特翼虎kuga 整车CAN通讯协议

福特翼虎kuga 整车CAN通讯协议第418-00节目录模块通信网络模块通信网络页码页码418-00-2 418-00-2 418-00-2418-00-19 418-00-19 418-00-21说明与操作通信网络............................................................................ ....................................................................... ...... .............................................概述............................................................................ .............................................................................. ........................................... 系统操作............................................................................ .............................................................................. ...................................诊断与测试通信网络............................................................................ ..................................................................... ........ .............................................症状表............................................................................ .............................................................................. ...................................... 定点测试............................................................................ .............................................................................. ...................................说明与操作说明与操作通信网络概述多路复用是一种通过一条电路同时发送两个或两个以上信号的方法。
ican协议

ican协议概述ican协议是一种用于数据交换和通信的协议。
它提供了一种简单、高效的方式来在不同的系统之间传输数据,以实现数据的共享和交流。
ican协议的设计目标是使不同系统之间的数据交换变得更加容易和可靠。
特点简单易用ican协议采用了简单的数据包格式,易于理解和实现。
它不依赖复杂的算法和数据结构,使得开发人员可以快速上手并进行开发。
高效可靠ican协议采用了高效的传输机制和错误检测机制,使得数据的传输更加可靠和高效。
它可以支持大规模的数据传输,并能够在不同环境下保持良好的性能。
可扩展性强ican协议支持可扩展性强的数据交换,可以轻松地添加新的功能和特性。
它提供了一套灵活的扩展机制,使得用户可以根据自己的需求进行定制和扩展。
协议格式ican协议采用了一种简单的数据包格式来传输数据。
每个数据包由头部和数据部分组成。
头部头部包含了一些必要的信息,用于标识数据包的类型和长度等。
它的格式如下:| 标志位 | 数据类型 | 长度 |•标志位:用于标识数据包的类型,可以是请求包或者响应包等。
•数据类型:用于标识数据包中数据的类型,可以是字符串、整数等。
•长度:表示数据包中数据的长度。
数据部分数据部分包含了实际的数据内容。
它的格式可以根据具体的需求进行定义和扩展。
使用示例以下是一个使用ican协议进行数据交换的示例:# 请求数据包示例请求类型数据类型长度0x01 string 10# 响应数据包示例响应类型数据类型长度0x02 string 15```总结ican协议是一种简单、高效、可扩展的数据交换和通信协议。
它可以帮助不同系统之间实现数据的共享和交流,提高数据交换的效率和可靠性。
通过使用ican 协议,开发人员可以更加便捷地进行系统集成和数据交互。
基于iCAN协议的嵌入式从站模块设计
在工 业 控制 系统 网络 化趋 势下 , 工 业 控 制 系 统 逐 渐
协 议 的报 文 解 析 与 打 包 , 并 完 成 于主 站 的 通 信 功 能 。
采 用 更 加 彻 底 的 分 布 式 结 构 ,而 在 这 个 发 展 过 程 中 , 现
场 总线 的应用起 到 了主导作 用¨ ] 。作 为 市 场 上 占 有 率 很 高的现场总线之一 , C A N— b u s总 线 凭 借 其 良好 的 开 放 性、 可 靠 性 和 实 时 性 以及 较 低 的 成 本 , 在工业 控制 、 远 程 数 据 传 输 等 领 域 中 获 得 了广 泛 应 用 [ 2 _ 。
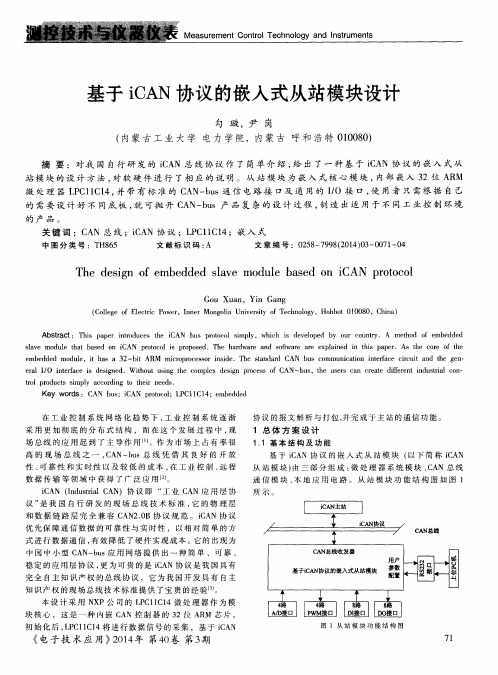
i C AN ( I n d u s t r i a l C A N)协 议 即 “ 工业 C A N 应 用 层 协
1 总体 方 案 设 计
1 . 1 基 本 结 构 及 功 能
基于 i C AN协 议 的 嵌 入 式 从 站 模 块 ( 以下 简称 i C AN 从 站模块 ) 由三部 分组 成 : 微处 理器 系统 模块 、 C A N 总 线
微 处理器 L P C1 1 C1 4, 并带有标准的 C A N— b u s通 信 电 路 接 口 及 通 用 的 I / O接 口 , 使 用 者 只 需 根 据 自 己
的 需要 设 计 好 不 同底 板 , 就可抛开 C A N— b u s产 品 复 杂 的 设 计 过 程 , 制 造 出 适 用 于 不 同 工 业 控 制 环 境
通 信模块 、 本地 应用 电路 。从站 模块 功 能结 构 图如 图 1
基于 i C A N协议 的嵌入式从站模块设计
勾 璇 ,尹 岗 ( 内蒙 古 工 业 大 学 电力 学 院,内蒙古 呼 和 浩 特 0 1 0 0 8 0 )
can总线通讯协议书
can总线通讯协议书甲方(以下简称“甲方”):地址:法定代表人:职务:联系电话:乙方(以下简称“乙方”):地址:法定代表人:职务:联系电话:鉴于甲方与乙方就CAN总线通讯技术的应用与合作达成一致,根据《中华人民共和国合同法》及相关法律法规的规定,经双方协商一致,特订立本协议书。
第一条协议目的1.1 本协议旨在明确双方在CAN总线通讯技术领域的合作内容、权利与义务,以及双方应遵守的规范和标准。
第二条合作内容2.1 甲方同意向乙方提供CAN总线通讯技术的相关支持与服务。
2.2 乙方同意按照本协议的规定,使用甲方提供的CAN总线通讯技术,并支付相应的费用。
第三条技术提供与使用3.1 甲方应保证提供的CAN总线通讯技术符合国家相关标准和行业规范。
3.2 乙方应保证在协议约定的范围内使用CAN总线通讯技术,不得用于非法目的。
第四条费用与支付4.1 双方应根据本协议的约定,确定技术使用的费用及支付方式。
4.2 乙方应按照约定的时间和方式向甲方支付相应的费用。
第五条保密条款5.1 双方应对在合作过程中知悉的商业秘密和技术秘密负有保密义务。
5.2 未经对方书面同意,任何一方不得向第三方披露、泄露或允许第三方使用上述保密信息。
第六条知识产权6.1 甲方提供的CAN总线通讯技术及相关知识产权归甲方所有。
6.2 乙方在本协议约定的范围内使用甲方的技术,不得侵犯甲方的知识产权。
第七条违约责任7.1 如一方违反本协议的约定,应承担违约责任,并赔偿对方因此遭受的损失。
7.2 违约方应支付违约金,具体金额由双方协商确定。
第八条协议的变更与解除8.1 本协议的任何变更或补充,应经双方协商一致,并以书面形式确认。
8.2 双方可协商一致解除本协议,但应提前通知对方。
第九条争议解决9.1 本协议在履行过程中发生的任何争议,双方应首先通过友好协商解决。
9.2 如协商不成,双方同意提交甲方所在地人民法院通过诉讼方式解决。
第十条其他10.1 本协议未尽事宜,双方可另行协商解决。
can协议完全讲解

can协议完全讲解Can协议完全讲解Can(Controller Area Network)协议是一种广泛应用于汽车和工业领域的通信协议。
它不仅仅是一种传输数据的方式,更是一种完整的通信体系,具备高度可靠性和实时性。
本文将从Can协议的基本原理、数据帧的结构、消息传输方式以及应用领域等方面进行详细讲解。
一、Can协议的基本原理Can协议是一种基于事件驱动的通信协议,它通过在总线上广播消息的方式进行通信。
Can总线上的所有节点都可以同时接收到发送的消息,但只有符合特定标识符的节点才会对消息做出响应。
这种方式使得Can协议具备高度的并发性和实时性。
二、数据帧的结构Can协议的数据帧由四个主要部分组成:起始位、标识符、控制域和数据域。
起始位用于标识一个数据帧的开始,标识符用于区分不同的消息类型,控制域用于控制数据帧的传输方式,数据域则是实际的数据内容。
三、消息传输方式Can协议采用了一种先进先出的消息队列机制来进行消息的传输。
每个节点都可以发送和接收消息,但发送的消息需要经过总线的仲裁机制来确定优先级。
如果多个节点同时发送消息,那么优先级高的节点将会获得总线的控制权,优先发送消息。
四、应用领域Can协议在汽车行业中得到了广泛的应用。
它可以用于汽车的各个系统之间的通信,如发动机控制、制动系统、车载娱乐系统等。
Can 协议还可以用于工业自动化领域,如机器人控制、传感器数据采集等。
总结:Can协议是一种广泛应用于汽车和工业领域的通信协议,它具备高度可靠性和实时性。
Can协议的基本原理是基于事件驱动的通信方式,通过在总线上广播消息的方式进行通信。
数据帧的结构包括起始位、标识符、控制域和数据域。
Can协议采用了先进先出的消息队列机制进行消息的传输,通过仲裁机制确定消息的优先级。
Can 协议在汽车和工业领域有着广泛的应用,可以用于各种系统之间的通信和数据传输。
以上就是对Can协议的完整讲解。
希望通过本文的介绍,读者对Can协议有了更加深入的了解。
CAN总线和iCAN协议的介绍
CAN总线和iCAN协议的介绍在进行系统信息传输网络的设计时,根据本系统的特性和实际的应用性从现有的几种较为普遍的车用总线中选择了CAN总线作为通信网络。
作为车用总线系统中覆盖范围最广的总线,CAN总线的主要特点是:1.总线为多主站总线,通信灵活;2.采用独特的非破坏性总线仲裁技术,从而避免了总线冲突,满足了实时性要求;3.支持多主工作方式,支持点对点,一点对多点的全局广播方式接受/发送数据方式;4.采用短帧结构传输,每帧有效字节数最多为8个,数据传输时间短,并有CRC及其他校验措施,数据出错率极低;5.具有自动关闭严重错误节点的功能,抗干扰能力强,可靠性高;6.系统走线少,扩充容易,改型灵活;7.最大传输速率可达1MB/S,直接通信距离最远可达l0KM;8.总线上的节点数量主要取决于总线驱动电路,标准帧(11位报文标识符)可达110个,而扩展帧(29位报文标识符)个数几乎不受限制[i]。
系统要求车身信息及时显示,各检测模块与主屏显示模块间的信息传输速率范围在10KB/S~125KB/S间;显示模块与检测模块之间能实现点对点,一点对多点、全局广播的数据通信模式;当总线上的一个模块出现问题时不影响到其他模块的通信。
基于以上的设计要求本系统选择了B类CAN总线作为通信网络。
由于CAN总线协议只规定了物理层和数据链路层,没有对应用层进行规定,导致整体功能并不完整[ii]。
因此在基于CAN总线技术的分布式控制系统中,有些功能必须要通过一个更高层的协议来实现,从而实现在CAN网络中通讯模式、网络管理功能执行、以及设备功能描述方式的统一[iii]。
目前占领主要国际市场的两个应用层协议为:CANOpen 协议和DeviceNet 协议。
CANopen协议适用于产品内部的嵌入式网络通信应用,DeviceNet协议是用于工业自动化控制,两种协议规范的复杂度较高,理解开发的难度较大[iv]。
这两种协议本车载信息系统设计中均不太适用,因此选用了一种简单可靠的CAN 总线应用层标准协议——iCAN协议。
iCAN (ican系统简介)

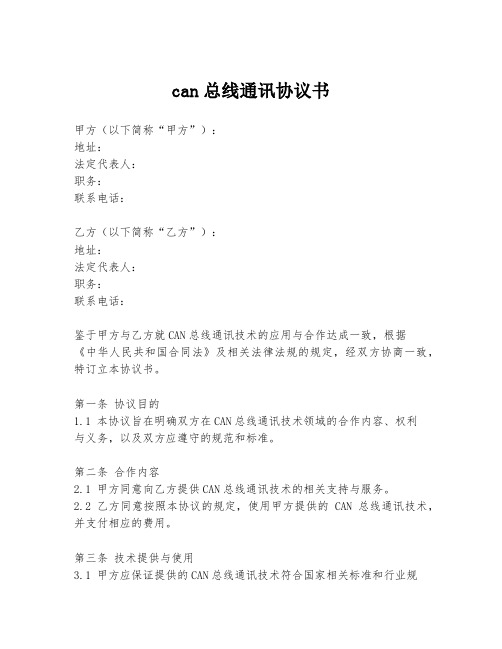
帧 ID28 ID27 ID26 ID25 ID24 标 SrcMAC ID(源结点编号) 识 符 ID20 ID19 ID18 ID17 ID16 DestMAC ID(目标结点编号)
ID12 ACK RTR=0 DLC ID11 ID10 ID9 ID8
ID23
ID22
ID21
ID15
ID14
Byte 6
Byte 7
iCAN实验演示
The Buildings of Management Center
The Buildings of Management Center
iCAN系统网络结构图
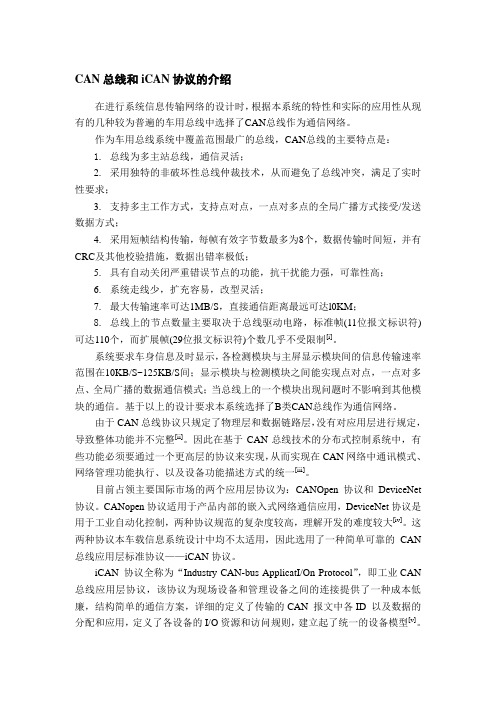
iCAN协议
iCAN协议是一种基于连接的CAN应用层协议,是整个 iCAN系统的基础与核心。制定iCAN协议的思路源于为中国中 小型CAN应用网络提供一种简单、可靠、稳定的应用层协议。 在充分汲取了DeviceNet协议和CANopen协议之精萃的基础上, 优先保障通信数据的可靠性与实时性,以相对简单的方式进 行数据通信,从而有效降低了硬件实现成本,这就是iCAN协 议的巨大优势。 iCAN协议通讯层结构 iCAN协议规范由四部分组成 • iCAN报文格式定义 • 报文传输协议 • 网络管理 • 设备的定义
ID13
ID7
ID6
ID5
ID4
ID3
ID2
ID1
ID0
FUNC ID (功能码)
Source ID (资源节点编号)
帧 数 据 部 分
Byte 0
SegPolo
SegNum
Byte 1 (LengthFlag,ErrID) Byte 2 Byte 3 Byte 4 Byte 5
报 文 格 式 定 义
can协议

can协议
CAN协议(Controller Area Network),是一种串行总
线通信协议,最初由BOSCH公司提出,用于汽车电子系统中的实时数据交换。
CAN协议的特点是高速、抗干扰能力强、具有优异的错误检测和纠正能力。
该协议使用非对称异步通信方式,支持多主机共线方式,可以以最高1Mbps的速率进行数据传输。
CAN协
议还支持基于时间触发的事件驱动,以及基于报文的消息传递方式。
CAN协议中的节点可以分为两类:CAN控制器和CAN节点。
CAN控制器负责物理层信号转换、网络中各节点之间的数据传
输和数据帧的传输协议处理。
CAN节点则负责上层协议的实现。
CAN协议支持两种数据帧格式:标准帧和扩展帧。
标准帧由11位标识符、一个RTR(传输请求)位、和8字节数据组成;扩展帧由29位标识符、一个RTR位和8字节数据组成。
CAN协议还支持远程帧,远程帧只有标识符和RTR位,用于请
求数据而不传输数据。
CAN协议的应用范围非常广泛,不仅仅限于汽车电子领域,也应用于工业自动化、医疗器械、航空航天等领域。
在工业自动化领域,CAN协议主要用于控制系统之间的数据通信,如传
感器、执行器、PLC等设备之间的数据交换。
在医疗器械领域,CAN协议被应用于医疗设备之间的数据传输。
在航空航天领域,CAN协议被广泛应用于航空电子设备之间的数据交换。
总之,CAN协议作为一种高效、稳定、可靠的串行总线通
信协议,已经得到广泛应用,并成为自动化领域一种重要的通信协议。
基于iCAN协议的CAN—bus分布式控制系统

5 iA C N系统 应 用
随 着 CAN —b s总 线 在 国 内 的 应 用 日益 广 泛 ,C u i AN
系统可 以帮助用户快 速建立 基于 C AN— u 总线 的分布 bs 式数据采集 网络 , 早一步获得现场总线 C N— u 带来的 A bs 先进优势 。
构 简 单 、 本 较 低 的 优 势 , 且 由于 采 用 C 成 而 AN— u 总 线 , bs
总线 的应 用 起 到 了 主导 作 用 。 作 为 市场 上 占有 率 很 高 的现 场 总 线 之 一 , AN —b s C u
总线凭借其 良好 的开放性 、 可靠性 和实 时性 以及较低的成
维普资讯
基于 iA C N协议 的 C N—b s 布式控制系统 A u分
■ 周 立 功 单 片 机 发 展 有 限 公 司
从建立一个 分布式控制系统 的角度 , 讨 C 探 AN—b s u
网络 的 应 用 , 及 iA 协 议 的 制 定 , 是 本 文 的 主 要 以 C N 这 内容 。
骤 。主 要 阐 述 以 下 内 容 :
作 为一个能够满足实际控制需求的 C N— u A b s网络 , iA C N系统可以 由用 户在 现 场按 需配 置 , 成 大型 、 构 中型
或小型分布式控 制网络 。同时, AN系统 能够将 多个 ቤተ መጻሕፍቲ ባይዱ i C
能不同、 符合规范 的 C AN—b s 品有 机联 网 , u产 形成一 个 实现指 定功能 的现场总线 网络 , 从而提供一整套完整的现 场通信 和数据采集方案 。
iA 系 统 。 C N
2 iA C N系统 简 介
CAN协议控制器区域网络的通信协议
CAN协议控制器区域网络的通信协议CAN协议是控制器区域网络的通信协议CAN协议是一种用于控制器区域网络的通信协议,广泛应用于汽车、机械控制系统、工业自动化等领域。
它基于串行通信技术,能够实现可靠的高速数据传输,并具备抗干扰能力,因此成为许多实时、可靠性要求较高的系统的首选通信协议。
一、CAN协议简介CAN协议是Controller Area Network(控制器区域网络)的缩写,最早由德国Bosch公司于1986年提出。
它是一种基于串行通信的总线系统,使用两条差分信号线进行数据传输,分别称为CAN_H和CAN_L。
CAN协议的通信过程包括消息的发送和接收,所有节点共享同一个总线,并通过识别消息的优先级进行数据传输。
CAN协议的通信速率一般可达到1Mbps,最长传输距离可达到40km,具备良好的实时性和稳定性。
二、CAN协议的特点1. 高可靠性:CAN协议采用差分信号传输,具备较强的抗干扰能力,能够有效地抵抗电磁噪声和信号干扰。
2. 实时性强:CAN协议的消息具备优先级,优先级高的消息将优先传输,这保证了关键消息的实时性。
3. 网络拓扑简单:CAN总线采用多主从结构,也可用于主主结构,网络拓扑结构简单,易于扩展和管理。
4. 低成本:CAN协议的硬件成本相对较低,便于在大规模系统中广泛应用。
三、CAN协议的应用CAN协议在许多领域都有广泛的应用,尤其在汽车电子领域。
以下是一些常见的应用场景:1. 汽车电子系统:CAN协议被广泛应用于汽车的发动机、变速器、刹车系统、底盘控制系统、车身电子、娱乐系统等各个方面,实现各个控制单元之间的信息交互和数据传输。
2. 机械控制系统:CAN协议可以用于各种机械设备的控制系统,如工业机器人、数控机床、起重机等,实现控制器之间的通信和协作。
3. 工业自动化:CAN协议可用于控制工业设备、自动化生产线以及传感器和执行器之间的通信,提高工业自动化系统的稳定性和可靠性。
4. 医疗设备:CAN协议可以应用于医疗设备的控制和监测,如医疗影像设备、手术机器人等,实现设备之间的数据传输和信息交互。
CAN总线相关知识点归纳(1)

CAN总线相关知识点归纳I概述CAN (Controller Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。
想到CAN就要想到德国的Bosch公司,因为CAN就是这个公司开发的(和Intel) CAN 有很多优秀的特点,使得它能够被广泛的应用。
比如:传输速度最高到IMbps, 通信距离最远到IOkm,无损位仲裁机制,多主结构。
近些年来,CAN控制器价格越来越低,很多MeU也集成了CAN控制器。
现在每一辆汽车上都装有CAN总线。
一个典型的CAN应用场景:y∙7:7、行电机・控制第〃接近开关“s光电开关1信号调理模块I CAN总线标准CAN总线标准只规定了物理层和数据链路层,需要用户自定义应用层。
不同的CAN 标准仅物理层不同。
CAN收发器负责逻辑电平和物理信号之间的转换。
将逻辑信号转换成物理信号(差分电平),或者将物理信号转换成逻辑电平。
CAN 标准有两个,即IoSII898和K)SII519,两者差分电平特性不同。
ISOII898高速CAN电平高低电平幅度低,对应的传输速度快;物理层CAN有三种接口器件多个节点连接,只要有一个为低电平,总线就为低电平,只有所有节点输出高电平时,才为高电平。
所谓〃线与〃。
CAN 总线有5个连续相同位后,就插入一个相反位,产生跳变沿,用于同步。
从 而消除累积误差。
和485、232 一样,CAN 的传输速度与距离成反比。
因为电缆的特性阻抗为120。
,为了模拟无限远的传输线数据链路层CAN 总线传输的是CAN 帧,CAN 的通信帧分成五种,分别为数据帧、远程帧、 错误帧、过载帧和帧间隔。
数据帧用来节点之间收发数据,是使用最多的帧类型;远程帧用来接收节点向发 送节点接收数据;错误帧是某节点发现帧错误时用来向其他节点通知的帧;过载 帧是接收节点用来向发送节点告知自身接收能力的帧;用于将数据帧、远程帧与 前面帧隔离的帧。
数据帧根据仲裁段长度不同分为标准帧(2. OA)和扩展帧(2. OB)帧起始低速 CAN-bus 终端电阻接法高速CAN∙bus 终端电阻接法为什么是120 Ω, 使线路阻抗连续,信号波形完帧起始由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧 起始;帧结束由7个隐形位(高电平)组成。
can协议完全讲解

can协议完全讲解CAN(Controller Area Network,控制器局域网)协议是一种用于在电子设备之间通信的通信协议。
它最初是由罗伯特·博丁(Robert Bosch GmbH)在1983年开发的,旨在解决汽车电子系统中的通信问题。
随着时间的推移,CAN协议逐渐被其他行业广泛采用,包括工业自动化、航空航天、医疗设备等。
CAN协议的成功之处在于其高度可靠性和实时性能,以及其简单而有效的通信机制。
CAN协议的核心概念是消息传输。
在CAN网络中,设备通过发送和接收消息来进行通信。
每个消息都有一个唯一的标识符(ID),用于在网络中识别消息的优先级和内容。
CAN协议支持两种类型的消息传输:数据帧(Data Frame)和远程帧(Remote Frame)。
数据帧用于传输实际的数据,而远程帧用于请求其他设备发送数据。
CAN协议使用一种基于冲突检测的机制来确保消息的可靠传输。
当多个设备同时发送消息时,可能会发生冲突。
CAN协议通过检测冲突并选择一个优先级最高的消息来解决冲突。
如果冲突发生,设备将停止发送消息,并在一段时间后重新尝试发送。
为了提高通信的实时性,CAN协议使用了一种称为“帧分发时间(Frame Distribution Time)”的机制。
该机制将消息划分为多个时间段,并确保每个时间段只有一个设备可以发送消息。
这种机制可以有效地减少冲突,提高网络的吞吐量和响应时间。
除了可靠性和实时性,CAN协议还具有高度的扩展性。
CAN网络可以支持多达数百个设备,并且可以通过连接多个CAN网络来构建更大的网络。
此外,CAN协议还支持多种不同的传输速率,以满足不同应用的需求。
在实际应用中,CAN协议被广泛用于汽车电子系统中。
在现代汽车中,CAN网络用于连接各种传感器和执行器,以实现功能如发动机控制、刹车系统、座椅控制等。
CAN协议的高度可靠性和实时性使其成为汽车电子系统中的理想选择。
CAN协议也被广泛应用于工业自动化领域。
iCAN 协议规范
Industry CAN-bus Application Protocoli CAN协议规范Rev 1.01广州致远电子有限公司工业通讯网络事业部修订历史版本日期原因Rev X1 2007/06/12 内部制定初稿Rev 1.00 2007/09/22 第一次发布Rev 1.01 2007/12/17 更改波特率定义i CAN协议规范Rev 1.00目录1. CAN协议规范简介 (6)2. i CAN协议规范的介绍 (8)2.1 iCAN协议规范中专有名词解释 (8)2.2 i CAN网络的特性 (9)2.2.1 电气传输介质 (9)2.2.2 物理层 (10)2.2.3 数据链路层 (10)2.3 iCAN协议规范中数据通讯的实现 (11)2.3.1数据通讯模型 (11)2.3.2 i CAN网络设备的编址 (12)2.3.3 基于连接的通讯 (12)2.4 设备模型 (13)2.4.1 资源节点 (14)2.4.2 资源子节点 (16)3. i CAN协议报文格式 (17)3.1 i CAN报文的格式说明 (17)3.2 i CAN报文标识符的分配 (17)3.2.1 MAC ID(节点地址) (18)3.2.2 ACK(响应标识位) (19)3.2.3 FuncID(功能码) (19)3.2.4 Source ID(资源节点地址) (19)3.3 i CAN帧数据部分定义 (20)3.3.1 Byte0(SegFlag) (20)3.3.2 Byte1~Byte7(Para) (21)4. i CAN通讯帧传输协议 (23)4.1 i CAN协议通讯模式 (23)4.1.1 主从通讯模式 (23)4.1.2 事件触发通讯模式 (24)4.2 i CAN协议报文处理流程 (24)4.3 i CAN报文传输协议 (26)4.3.1 i CAN帧格式 (26)4.3.1.1 命令帧 (26)4.3.1.2 正常响应帧 (26)4.3.1.3异常响应帧 (26)4.3.2 i CAN报文传输的一般规则 (26)4.3.2.1 MAC ID检测帧 (27)4.3.2.2 广播帧 (27)i CAN协议规范Rev 1.004.3.3 i CAN分段传输协议 (28)4.3.3.1 i CAN分段帧格式 (28)4.3.3.2 i CAN分段传输规则 (29)4.4 i CAN通讯帧格式解析 (32)4.4.1 连续写端口命令:FuncID=0x01 (32)4.4.1.1 命令帧格式 (32)4.4.1.2 响应帧格式 (32)4.4.1.3 示例 (33)4.4.2 连续读端口命令:FuncID=0x02 (34)4.4.2.1 命令帧格式 (34)4.4.2.2 响应帧格式 (35)4.4.2.3 示例 (36)4.4.3 事件触发传送命令:FuncID=0x03 (37)4.4.3.1 命令帧格式 (37)4.4.3.2 示例 (37)4.4.4 建立连接命令:FuncID=0x04 (37)4.4.4.1 命令帧格式 (37)4.4.4.2 响应帧格式 (38)4.4.4.3 示例 (38)4.4.5 删除连接命令:FuncID=0x05 (39)4.4.5.1 命令帧格式 (39)4.4.5.2 响应帧格式 (39)4.4.5.3 示例 (39)4.4.6 设备复位命令:FuncID=0x06 (40)4.4.6.1 命令帧格式 (40)4.4.6.2 响应帧格式 (40)4.4.6.3 示例 (40)4.4.7 MAC ID检测命令:FuncID=0x07 (41)4.4.7.1 命令帧格式 (41)4.4.7.2 响应帧格式 (41)4.4.7.3 示例 (41)5. iCAN协议规范中设备定义 (43)5.1 I/O资源说明 (44)5.1.1 DI:数字量输入单元 (44)5.1.2 DO:数字量输出单元 (44)5.1.3 AI:模拟量输入单元 (44)5.1.4 AO:模拟量输出单元 (45)5.1.5 Ser i al Port:串口输入、输出单元 (45)5.1.6 Others:其他应用单元 (46)5.2 配置资源说明 (46)5.2.1 设备标识资源 (47)i CAN协议规范Rev 1.005.2.3 I/O参数及设置 (49)6. i CAN协议网络管理 (51)6.1 i CAN设备网络访问状态机制 (51)6.1.1 网络状态 (52)6.1.1.1 发送MAC ID检测报文状态 (52)6.1.1.2 等待MAC ID响应报文 (52)6.1.1.3 可操作状态 (52)6.1.1.4 错误状态 (52)6.1.2 MAC ID检测应用说明 (52)6.2 i CAN通讯的控制 (53)6.2.1 MAC ID检测定时器 (53)6.2.2 连接定时器 (54)6.2.2.1 主站通讯定时参数(Cycl i cMaster)定义 (54)6.2.2.2 连接定时器应用规则 (54)6.2.3 循环传送定时器 (55)6.2.3.1 定时循环参数(Cycl i cParameter)定义 (55)6.2.3.2 循环定时应用规则 (55)6.2.4 事件触发时间管理 (56)声明 (57)i CAN协议规范Rev 1.00i CAN 协议规范 Rev 1.001. CAN 协议规范简介CAN-bus ( Controller Area Network ) 即控制器局域网,是国际上应用最广泛的现场总线之一。
CAN协议完全讲解
CAN协议完全讲解CAN(Controller Area Network)是一种广泛应用于汽车和工业控制系统的通信协议。
它最早由德国Bosch公司于1983年开发出来,目的是为了解决汽车电子设备之间的通信问题。
CAN协议具有高可靠性、实时性强、带宽大等特点,在汽车以及其他领域被广泛使用。
本文将全面讲解CAN协议的原理、数据帧格式、通信方式以及应用。
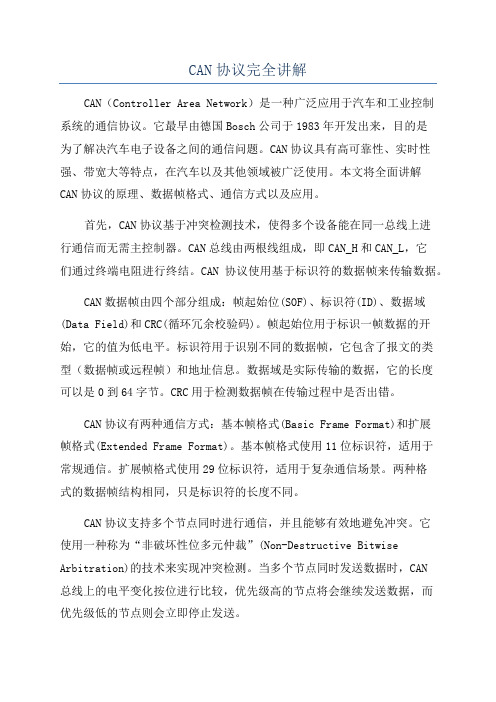
首先,CAN协议基于冲突检测技术,使得多个设备能在同一总线上进行通信而无需主控制器。
CAN总线由两根线组成,即CAN_H和CAN_L,它们通过终端电阻进行终结。
CAN协议使用基于标识符的数据帧来传输数据。
CAN数据帧由四个部分组成:帧起始位(SOF)、标识符(ID)、数据域(Data Field)和CRC(循环冗余校验码)。
帧起始位用于标识一帧数据的开始,它的值为低电平。
标识符用于识别不同的数据帧,它包含了报文的类型(数据帧或远程帧)和地址信息。
数据域是实际传输的数据,它的长度可以是0到64字节。
CRC用于检测数据帧在传输过程中是否出错。
CAN协议有两种通信方式:基本帧格式(Basic Frame Format)和扩展帧格式(Extended Frame Format)。
基本帧格式使用11位标识符,适用于常规通信。
扩展帧格式使用29位标识符,适用于复杂通信场景。
两种格式的数据帧结构相同,只是标识符的长度不同。
CAN协议支持多个节点同时进行通信,并且能够有效地避免冲突。
它使用一种称为“非破坏性位多元仲裁”(Non-Destructive Bitwise Arbitration)的技术来实现冲突检测。
当多个节点同时发送数据时,CAN总线上的电平变化按位进行比较,优先级高的节点将会继续发送数据,而优先级低的节点则会立即停止发送。
CAN协议还具有很高的实时性。
每个节点在发送数据之前会经过固定的延迟时间,这样可以确保数据能够在预定时间内传输到达目标设备,从而满足实时性要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Industry CAN-bus Application Protocoli CAN协议规范Rev 1.01广州致远电子有限公司工业通讯网络事业部修订历史版本日期原因Rev X1 2007/06/12 内部制定初稿Rev 1.00 2007/09/22 第一次发布Rev 1.01 2007/12/17 更改波特率定义i CAN协议规范Rev 1.00目录1. CAN协议规范简介 (6)2. i CAN协议规范的介绍 (8)2.1 iCAN协议规范中专有名词解释 (8)2.2 i CAN网络的特性 (9)2.2.1 电气传输介质 (9)2.2.2 物理层 (10)2.2.3 数据链路层 (10)2.3 iCAN协议规范中数据通讯的实现 (11)2.3.1数据通讯模型 (11)2.3.2 i CAN网络设备的编址 (12)2.3.3 基于连接的通讯 (12)2.4 设备模型 (13)2.4.1 资源节点 (14)2.4.2 资源子节点 (16)3. i CAN协议报文格式 (17)3.1 i CAN报文的格式说明 (17)3.2 i CAN报文标识符的分配 (17)3.2.1 MAC ID(节点地址) (18)3.2.2 ACK(响应标识位) (19)3.2.3 FuncID(功能码) (19)3.2.4 Source ID(资源节点地址) (19)3.3 i CAN帧数据部分定义 (20)3.3.1 Byte0(SegFlag) (20)3.3.2 Byte1~Byte7(Para) (21)4. i CAN通讯帧传输协议 (23)4.1 i CAN协议通讯模式 (23)4.1.1 主从通讯模式 (23)4.1.2 事件触发通讯模式 (24)4.2 i CAN协议报文处理流程 (24)4.3 i CAN报文传输协议 (26)4.3.1 i CAN帧格式 (26)4.3.1.1 命令帧 (26)4.3.1.2 正常响应帧 (26)4.3.1.3异常响应帧 (26)4.3.2 i CAN报文传输的一般规则 (26)4.3.2.1 MAC ID检测帧 (27)4.3.2.2 广播帧 (27)i CAN协议规范Rev 1.004.3.3 i CAN分段传输协议 (28)4.3.3.1 i CAN分段帧格式 (28)4.3.3.2 i CAN分段传输规则 (29)4.4 i CAN通讯帧格式解析 (32)4.4.1 连续写端口命令:FuncID=0x01 (32)4.4.1.1 命令帧格式 (32)4.4.1.2 响应帧格式 (32)4.4.1.3 示例 (33)4.4.2 连续读端口命令:FuncID=0x02 (34)4.4.2.1 命令帧格式 (34)4.4.2.2 响应帧格式 (35)4.4.2.3 示例 (36)4.4.3 事件触发传送命令:FuncID=0x03 (37)4.4.3.1 命令帧格式 (37)4.4.3.2 示例 (37)4.4.4 建立连接命令:FuncID=0x04 (37)4.4.4.1 命令帧格式 (37)4.4.4.2 响应帧格式 (38)4.4.4.3 示例 (38)4.4.5 删除连接命令:FuncID=0x05 (39)4.4.5.1 命令帧格式 (39)4.4.5.2 响应帧格式 (39)4.4.5.3 示例 (39)4.4.6 设备复位命令:FuncID=0x06 (40)4.4.6.1 命令帧格式 (40)4.4.6.2 响应帧格式 (40)4.4.6.3 示例 (40)4.4.7 MAC ID检测命令:FuncID=0x07 (41)4.4.7.1 命令帧格式 (41)4.4.7.2 响应帧格式 (41)4.4.7.3 示例 (41)5. iCAN协议规范中设备定义 (43)5.1 I/O资源说明 (44)5.1.1 DI:数字量输入单元 (44)5.1.2 DO:数字量输出单元 (44)5.1.3 AI:模拟量输入单元 (44)5.1.4 AO:模拟量输出单元 (45)5.1.5 Ser i al Port:串口输入、输出单元 (45)5.1.6 Others:其他应用单元 (46)5.2 配置资源说明 (46)5.2.1 设备标识资源 (47)i CAN协议规范Rev 1.005.2.3 I/O参数及设置 (49)6. i CAN协议网络管理 (51)6.1 i CAN设备网络访问状态机制 (51)6.1.1 网络状态 (52)6.1.1.1 发送MAC ID检测报文状态 (52)6.1.1.2 等待MAC ID响应报文 (52)6.1.1.3 可操作状态 (52)6.1.1.4 错误状态 (52)6.1.2 MAC ID检测应用说明 (52)6.2 i CAN通讯的控制 (53)6.2.1 MAC ID检测定时器 (53)6.2.2 连接定时器 (54)6.2.2.1 主站通讯定时参数(Cycl i cMaster)定义 (54)6.2.2.2 连接定时器应用规则 (54)6.2.3 循环传送定时器 (55)6.2.3.1 定时循环参数(Cycl i cParameter)定义 (55)6.2.3.2 循环定时应用规则 (55)6.2.4 事件触发时间管理 (56)声明 (57)i CAN协议规范Rev 1.00i CAN 协议规范 Rev 1.001. CAN 协议规范简介CAN-bus ( Controller Area Network ) 即控制器局域网,是国际上应用最广泛的现场总线之一。
最初CAN-bus 被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU 之间交换信息,形成汽车电子控制网络。
比如发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN 控制装置。
CAN-bus 是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性而且能够检测出产生的任何错误。
当信号传输距离达到10Km 时,CAN-bus 仍可提供高达5Kbps 的数据传输速率。
由于CAN 串行通讯总线具有这些特性,它很自然地在汽车制造业以及航空工业中受到广泛应用。
作为一种技术先进、可靠性高、功能完善、成本合理的远程网络通讯控制方式,CAN-bus 已被广泛应用到各个自动化控制系统中。
从高速的网络到低价位的多路接线都可以使用CAN-bus 。
例如在汽车电子、自动控制、智能大厦、电力系统、安防监控等各领域,CAN-bus 都具有不可比拟的优越性。
CAN-bus 的主要特性如下:z 低成本;z 多主结构,极高的总线利用率;z 很远的数据传输距离(长达10Km ),高速的数据传输速率(高达1M b i t/s ); z 短的报文长度:每个报文允许传输最高8个字节的数据;z 引入报文滤波,可根据报文的标识符决定接收或屏蔽该报文;z 报文不包含源地址或目标地址,仅用标识符来指示功能信息、优先级信息;z 可靠的错误处理和检测机制,;发送的信息遭到破坏后,可自动重发;z 节点在错误严重的情况下,具有自动退出总线的功能。
从OSI 网络模型的角度来看,现场总线网络一般只实现了第1层(物理层)、第2层(数据链路层)、第7层(应用层)。
CAN (Controller Area Network )现场总线仅仅定义了第1层:物理层以及第2层:数据链路层(参考ISO11898标准)。
图 1.1 CAN-bus 的分层结构由于CAN总线底层协议没有规定应用层,本身并不完整;在基于CAN-bus的分布式控制系统中,有些附加功能需要一个高层协议来实现,例如CAN报文中的11/29位标识符和8字节数据的使用,发送大于8个字节的数据块,如何响应或者确定报文的传送,网络的启动及监控,网络中CAN节点的标识和故障识别等。
因此有必要建立一个高层协议,即基于CAN总线的应用层协议,能够在CAN网络中实现统一的通讯模式,执行网络管理功能,以及提供设备功能描述方式。
目前在已经有一些可以使用的高层协议,例如:z Dev i ceNet协议,制定组织:ODV Az CANOpen协议,制定组织:C i Az CAL 协议,制定组织:C i Az SDS 协议,制定组织:Honeywellz CANK i ngdom 协议,制定组织:Kvaser目前真正占领市场的两个应用层协议是:Dev i ceNet协议和CANOpen 协议。
Dev i ceNet 协议适合于工业自动化控制。
CANopen协议适合于产品部件内部的嵌入式网络,在汽车、电梯、医疗仪器以及船舶运输等领域均有广泛的应用。
但是Dev i ceNet和CANopen协议规范比较复杂,理解和开发的难度比较大,对于一些并不复杂的基于CAN总线的控制网络不太适合。
因此有必要开发设计一种简单可靠的CAN高层协议,以适合于CAN的简单应用场合,iCAN协议由此应运而生。
i CAN协议规范Rev 1.002.i CAN协议规范的介绍i CAN协议全称“Industry CAN-bus ApplicatI/On Protocol”,即工业CAN-bus应用层协议,它向工业控制领域提供了一种易于构建的CAN-bus网络,为工业现场设备(传感器、仪表等)与管理设备(工控机、PLC等)之间的连接提供了一种低成本的通讯解决方案。
i CAN协议详细的定义了CAN报文中ID以及数据的分配和应用,建立了一个统一的设备模型,定义了设备的I/O资源和访问规则,通信模型如图 2.1所示。
图 2.1 i CAN协议通信模型i CAN协议规范主要描述了以下的内容:z i CAN报文格式定义:规定了iCAN协议规范中使用的CAN帧类型、以及帧ID、报文数据的使用等;z报文传输协议:规定了基于i CAN协议的设备之间的通讯方式;z设备的定义:设备标识、设备应用单元、设备通讯以及应用参数以及定义标准设备类型,区分网络上设备具有的不同功能或者产品类型;z网络管理:规定了设备通讯监控以及错误管理。
2.1iCAN协议规范中专有名词解释z源节点:发送报文的节点。
z目标节点:接收报文的节点。
z主站(主控节点、主控设备、主站):基于i CAN协议网络中的管理设备,负责管理整个网络中的通讯,可以为PC或者嵌入式设备。
z从站(受控节点、受控设备、从站):基于i CAN协议网络中的I/O设备单元,主站建立与从站的数据通讯,从从站获取输入数据,并向它分配输出数据。
z节点:iCAN网络中主站和从站。
i CAN协议规范Rev 1.00z资源节点:指设备中特定的应用单元,如I/O端口。
z资源子节点:指设备中特定配置单元中的子单元,如配置资源。