自行车变速器电机参数
变速器电机校正不匹配的原因

变速器电机校正不匹配的原因变速器电机校正不匹配是指在变速器中的电机校正过程中,由于一些原因导致校正结果与预期不一致的现象。
这种不匹配可能会导致变速器的性能下降,甚至造成故障。
下面将介绍一些可能导致变速器电机校正不匹配的原因。
一个可能的原因是传感器故障。
变速器电机校正过程中需要借助传感器来监测电机的转速和位置等参数,以便进行校正。
如果传感器出现故障,可能会导致校正结果不准确。
例如,转速传感器可能会出现读数不稳定或者错误的情况,导致校正过程中的误差。
变速器系统的软件算法也可能是导致校正不匹配的原因之一。
变速器校正过程中的算法需要根据电机的参数和实际情况来进行计算和调整。
如果算法设计不合理或者实现有误,就可能导致校正结果与预期不一致。
例如,算法可能没有考虑到某些特殊情况,导致校正结果出现偏差。
变速器电机校正不匹配还可能与电源电压的稳定性有关。
电机的校正过程需要稳定的电源供应,如果电源电压波动较大,可能会导致电机的实际运行情况与校正过程中的期望不一致。
因此,在进行电机校正时,需要确保电源电压稳定,并且在校正过程中进行合理的电压补偿。
变速器的机械结构和磨损程度也会影响电机的校正结果。
如果变速器的机械结构存在问题或者磨损严重,可能会导致电机的实际性能与校正过程中的期望不一致。
例如,变速器的齿轮可能存在磨损或者断裂,导致电机的输出转矩不稳定或者出现偏差。
操作人员的技术水平和操作方法也可能是导致电机校正不匹配的原因之一。
电机校正需要操作人员具备一定的技术水平和经验,能够准确地操作和调整变速器。
如果操作人员对于电机校正的原理和方法不了解或者操作不当,就可能导致校正结果不准确。
因此,在进行电机校正时,应该培训和指导操作人员,确保其具备必要的技能和知识。
变速器电机校正不匹配可能由于传感器故障、软件算法问题、电源电压稳定性、机械结构和磨损以及操作人员技术水平等多种原因导致。
为了解决这个问题,需要从多个方面进行分析和改进,确保变速器电机校正的准确性和稳定性。
电动自行车电机效率和功率

电动自行车电机效率和功率长期以来,电动自行车电机的效率和功率成为“说不清”的问题,无论是有关标准的叙述,还是商品的样本、铭牌标注;无论是专业人员还是销售、采购人员,电动自行车电机的效率和功率始终没有一个公认和明确的定义。
所以重新讨论电动自行车电机的效率和功率问题是十分必要的。
工业标准电机的设计,大体上有2类原则:1.发热原则:电机的绕组、永磁材料或导电部分,主要的结构部分(如轴承)在经济使用寿命期(工业电机为15-20年,电刷允许定期更换)内允许安全运行的极限温度。
一般对于上述部位分别有明确的温度(或温升)限制,不同的材料也有不同的允许极限温度。
例如以聚酯薄膜聚酯纤维纸为槽绝缘和高强度聚酯漆包线组成的电气系统为B级绝缘。
连续运行时允许的绕组温升极限为80K(用电阻法检测)。
2.性能原则:性能原则包括电气性能,机械性能和其它性能等。
电气性能通常指力能指标(如效率、功率因数),转速,转速变化率,转矩,短时过载能力,换向等。
机械性能一般有外形和安装尺寸限制(如在轴向或径向尺寸上有所限制),转动惯量,材质,极限转速等。
其它性能一般有噪声,振动,可靠性,性能/价格比,特殊环境用途等。
根据用途,电机大体可以分为2类。
一类为驱动用,另一类为控制用。
很显然,电动自行车用的电机,应当归为驱动用电机。
在长期的实践中,工业驱动用的电机标准,巧妙地将上述2个原则融汇成一个整体。
如交流电机的温升和效率实际上都非常接近标准的上限,你很难说它属于“发热原则”设计还是“性能原则”设计。
温升和效率同时满足标准上限的电机通常效率值并不算高。
还有一种“高效率”电机,通常比普通电机效率高4-7%(与功率、转速等有关),它的温升就非常低,属于“性能原则”设计。
对于短时使用的(如阀门电机,有时几天,甚至一年才能运行一次)电机,通常没有考虑效率的必要,在保证基本性能要求的条件下,应当用“发热原则”设计。
反之我们也可以说,一台电机的额定功率是不确定的,按照“发热”或“性能”来确定,同一台电机的额定功率在相当大的范围内是变值。
电动摩托车技术参数

电动车专业技术参数解释2010-04-16 14:39:17 作者:释然浏览次数:19679电动自行车作为一种节能、环保(de)新型代步工具,逐渐被人们认同和接受.在电动自行车普及(de)今天,一些有关电动自行车(de)消费纠纷也开始出现.为了使人们增加对电动自行车(de)了解,现将电动自行车(de)几个主要技术参数简单介绍一下.一、电机最大输出功率和最大输出扭矩:电机最大输出功率是衡量电动车输出扭矩能力(de)关键指标,一般各个电动车厂都会根据自身(de)技术水平设置一个最大工作电流,当外在负载较大时,电动车(de)工作电流达到最大值,输入功率也就达到最大值,例如,某电动车最大工作电流设置为12A,工作电压为36V,则其最大(de)输入功率就达到432W.再例如,某电动车(de)最大电流限制为15A,电压也为36V,则最大输入功率达到540W;显然,有些电机在大电流状态下可以保持高效率,而有些电机在大电流状态下效率严重下降.例如绿源--绿色奔驰125电机在540W输入功率(de)情况下效率仍可高达75%.可以输出540×=405W,最大输出扭矩达到,而大多数电动车电机在430W输入时效率已降至55%左右,最大输出功率为430×=236W,最大输出扭矩仅为,显而易见,一辆最大扭矩为(de)电动车与一辆最大扭矩为(de)电动车在爬坡能力,允许载重能力以及抵抗风阻(de)能力等诸多方面都会有很大(de)差别,骑行(de)感觉是完全不同(de).消费者在购车时若需对车辆(de)最大输出扭矩进行试验,最简单(de)方法是“负重爬坡”,绿源公司生产(de)绿色奔驰125电动车在这方面处于国内领先地位.二、“续行里程”标称:电动自行车续行里程是这样定义(de):“新电池时充满电,骑行者重量配置至75公斤在平坦(de)二级公路上(无强风条件下)骑行,骑至电池电压小于节予以断电,在以上条件下,得到(de)骑行里程被称为电动自行车(de)续行里程”.一般配用36伏12安·时优质电池(de)各名牌电动自行车(de)续行里程大约都标称为45-60公里,而有个别厂家(de)标称会上升至70-80公里,这有虚假宣传(de)嫌疑.因为达到这种标称值表示其电机(de)效率要比名牌厂采用电机(de)效率提高了近40%.若某名牌厂生产(de)电机在上面描述(de)工作状态时(de)效率为75%,则标称70-80公里(de)厂家(de)电机效率已达到了100%以上,这显然是不可能(de),这一点特别提醒广大消费者注意.在实际使用过程中,充足电到底能行驶多少公里这与许多因素有关,与厂家有关(de)因素主要是电机(de)效率特性、蓄电池(de)容量和寿命特性,与其它客观情况有关(de)因素为:骑行者(de)体重、经常骑行(de)路面情况、是否需要经常使用刹车、骑车人(de)骑行习惯如何等等.需要提醒消费者注意(de)另一个问题是:电池容量是会随着使用时间(de)增长逐步变小(de),充足电可以行驶(de)距离也会随之减少,当旧电池(de)最大行驶距离不能满足一天(de)交通需要时,就可以考虑将蓄电池送去维护或更换新电池.三、电动车效率和效率区间:电动车效率是电动轮毂效率、控制系统效率和机械转动损耗(de)综合体现,但主要是取决于电动轮毂(电机)(de)效率,它可以反映在相同(de)电池,相同(de)骑行负载条件下骑行里程(de)长短,效率高则骑行里程长,效率低则反之,对于使用者而言,选购较高效率(de)电动车无疑是正确(de).但是,电动车(de)效率也需要有一个区间,因为电机效率在不同(de)扭矩下是不同(de),表示为一种马鞍型曲线形式,有些电动车电机在小功率时效率较高,一旦输出扭矩增加,效率值则急剧下降,这种车住住表现为平坦路面速度很快,一旦上坡速度就急剧下降,耗电水平也会随之大幅度增加.用效率区间(de)概念来代替单纯(de)额定效率(de)概念是电动自行车(de)一个重要特色,因为车辆负载是一个变化很大(de)负载,其工作点会随着车辆负重状态、路面坡度、行驶风阻(de)不同而发生很大(de)变化,追求某一个工作点(de)高效率而忽略整个工作区域(de)效率特性是毫无意义(de).电动车将效率值大于70%以上(de)区域称为电动车效率区间,一般为100-400W,也就是说这种电机可以在100W-400W(de)范围内均可保持70%以上(de)效率状态,最高效率达到80%以上,常用工作点(如130W)和最大工作点(400W)(de)效率应达到75%以上.市场上有些性能较差(de)电机可能其最大效率点(de)效率也可以达到80%以上,但效率区间却十分狭窄,一般为80W-180W,体重稍重(de)人骑上这种电动车会十分费电,电池也很容易损坏.用户可以用变换负载(de)方法来鉴别效率区间是否狭窄,当轻载时车速较快而重载时(负重或爬陡坡)车速迅速下降(de)电动车就属此例.四、电机额定输出功率和输出功率范围:电机额定功率是一个电机进行型式试验时(de)重要参数,它表示当电机工作在这个功率点时,该电机可以连续地可靠地运行,表征了电机设计(de)热平衡点.一般电动车电机(de)额定功率点可以是150W,180W或200W以上,额定点越高表示电机(de)热性能越好,成本也越高.由于电动车是不可能工作在空载状态下(de),一个正常(de)骑车人重量一般会达到30公斤以上,再考虑正常风阻等因素,电动车(de)最小工作点(输出功率)大约为80W,最大输出功率则取决于电机(de)设计方案.目前市售较好(de)电动车(de)最大输出功率一般可以达到200W以上,个别较差(de)电机不足200W,绿源电动车“绿色奔驰125”系列(de)输出功率范围为80-400W,绿色奔驰100系列(de)输出功率范围为80-320W.显然,输出功率范围越大,骑行性能则越好.五、蓄电池容量和寿命:容量和寿命是衡量蓄电池(de)主要指标,容量一般用安·时来表示,表征是蓄电池储备能量(de)能力.例如一个标称为12安·时(de)新(de)电动车专用蓄电池组按最近制定(de)行业标准,则必须达到以6安培放电,放至终止电压(de)时间应不低于2小时(de)水平.将这种电池用于电动自行车,载重75公斤,在平坦路面骑行,工作电流约为4安培,放电时间应大于3个小时,时速为20公里,那么它(de)理论续行里程将达到60公里,若考虑途中刹车、起动等费电(de)因素,采用这种电池(de)电动车标称续行里程45-60里程是合适(de).寿命则是表示蓄电池容量衰退速度(de)一项指标,随着使用(de)深入,蓄电池容量衰退是不可避免(de),是绝对(de),当容量衰退到一个规定值时,可以判定寿命终结,按照新制定(de)电动车专用电池标准,以定容量70%充放电循环次数来表示蓄电池(de)寿命,合格底线为350次.因此,对于日常交通距离小于30公里(de)用户而言,若电机、控制器、充电器等因素都是良好(de),使用方法也无不当,一组较好(de)电池(de)最少服役时间达到1年以上应该是可以保证(de),一般可以用到1年半,若再加上可维护(de)技术方案,通过专业(de)维护也可以延长一些服役时间,消费者可以不必担心蓄电池使用费用过高(de)问题,每天壹元,潇洒消费.六、影响蓄电池寿命(de)因素:影响蓄电池寿命(de)因素可分成三个方面.首先是蓄电池本身(de)性能和质量,其次是电动车中与之配合(de)因素,第三是使用者(de)使用情况我们将重点对第二个因素展开讨论.在电动车系统中影响蓄电池使用寿命(de)最主要因素有两个,一个是电机(de)效率状态,其次是充电器(de)设计.如果电机效率范围较窄,一方面耗电水平增加,另一方面,经常工作在低效率区,电机内部容易发热,当温度过高时,磁性材料就会出现不可逆(de)退磁,久而久之,效率进一步下降,从而进入恶性循环,这辆电动车就会变成某种意义上(de)“电老虎”,即使更换了电池也会无济于事,另外导致电机降低效率(de)因素还有:电刷(de)过度磨损、平面换向器(de)磨损,减速系统(de)磨损,等等,因此,顾客应选择一种性能较好(de)电机并注意与维修服务保持联系、到期更换磨损零件,这样有助于用好电动车.当电动自行车走进千家万户时,电动自行车将逐渐被人们所了解.通过对电动自行车(de)几个主要技术参数(de)简单介绍,希望能有助于增加人们对电动自行车(de)了解 .电动车四大部件质量(de)分析2010-03-02 12:50:20 作者:路西法浏览次数:9018电动自行车目前所反映(de)质量问题,其中以电池为最多,原因是电池质量问题,车速超国标、电机功率过大,必须从根本上解决这些问题.电动自行车已为政府所准许,为百姓所青睐,为不少地方政府所推动,其遍布大江南北、四面八方,同时,电动自行车在这几年(de)实际商业化进程中,也暴露出了严重(de)质量问题,如电池问题、控制器问题、电机问题等,原因是一哄而起,技术门槛低,组装厂螺丝刀工厂遍布.造成质量差(de)原因有以下几点:1、整车电机功率和电池容量配置不对称目前(de)电动自行车、电动摩托车、电动汽车之电机大部分采用直流电机,以通用(de)轮毂电机为例,一般效率都不高,直流有刷电机,90年代初时效率为63%左右,目前在70%左右,无刷电机刚问世时能做到78%~80%,有(de)可达83%.现在电动自行车行业在价格竞争(de)条件下,比拼成本,那么节省材料,如节省电磁线,永磁材料,因此电机实际工作效率很低,那么在功率、电压不变(de)前提下,其正常工作电流必然加大.在这种情况下,电机实际输入电流要求很大,无意中必然加大电池放电(de)电流.也就是说为确保电动车车速,电机功率必然加大.一般来说电机启动电流是正常行驶电流(de)3~5倍,上坡时电机电流是正常行驶电流(de)3倍,其差距是很大(de).电动自行车在96年时电机功率为120W~150W以内,配载电池一组24V、12Ah,在实际运行中,电池寿命很短,或难以输出使电机正常工作(de)电流,后来电池组改为36V、12Ah.能基本保证电动自行车正常行驶, 电池能行驶40km~50km.但电池制造商承诺(de)寿命却做不到,用不了几个月,电池容量在为减少,续行里程缩短了许多,原因何在呢答案很明显,电机电流太大,因为后来电机功率在180W以上,甚至有200W和250W(de)轮毂电机,电池在这种工作电流摧残下,伤害极大,就出现了上述问题.另外,现有电动车辆之直流有刷、无刷电机,交流异步电机,其调速方式均用电子控制器来进行,没有离合器功能,(个别改装型汽车仍保留离合器和变速箱).在市区行驶(de)电动车停车、启动频繁,对电池板伤害大,由于没有离合,空载功能、启动电流大,且启动时间比燃油车慢了许多.再有现在无刷、有刷直流电机有不少不采用减速齿轮,直接用电子控制器方式将电机初始转速降至额定转速,如180转—200转/分,这样对爬坡、负载性能极差,工作电流更大,对电池极板伤害,直接造成了电池寿命和容量(de)减少.用户(de)直接反映是电池质量不行,其实原因多种除了电池制造厂本身质量差,原材料次、偷工减料而影响质量以外,另一个原因是电机问题和控制问题.这是一个不容忽视而被大家忽视(de)问题,而普通骑车人系非专业人士,但就不清楚原因何在了.电机质量按普通工业用电机一般在8年寿命以上,为什么轮毂电机(用于电动自行车,电摩)只能保证二年,有(de)甚至不敢承诺2年,究其原因电机用料差,小牛拉大车所致.结论:(1)电动车车速≤km/h国标;(2)>20km/h时电池应在15Ah;(3)电机效率80%以上;(4)电机带离合功能,怠速功能;(5)电机调速方式:A用限流器;B 用档位加延时,不能一旋到底.2、电池质量差二次电池大致分为动力型和启动型二大类,用于电动车、船(de)各种电池统称为动力型电池,它要求能大电流放电,以适应牵引电机(de)启动,加速负载爬坡等工况之要求.而目前使用(de)铅酸电池均慢充慢放类型,若快充快放则寿命短.目前电池厂众多鱼龙混杂,质量难以保证,价格相差很大,以12V×12Ah铅酸电池为例,较高档(de)市场信誉度较高(de)价格在90元/个左右,一般80元/个,大路货65元/个左右,最低档(de)50元/个左右,一般随整车出厂时普遍用65元/个(de)电池,品牌整车(de)用80元/个(de)电池,当旧车换电时就以次充好,以将50元/个(de)电池卖给骑车人,收费100元以上,要成倍加价.由于整车用所用电池其质量包括在整车质量中,换句话说买了新车,电池达不到承诺期限要包换(de),因此,整车采取要电池厂辅底和过保证期后付款(de)办法来与电池厂得“保甲连坐”实则无奈.另一种情况是有(de)厂家,铅酸电池新出厂时,储电量比普通(de)电池多,电动自行车续行里程长,甚至达到50-60km,但一个阶段后,储电量急刷减少,到后期容量不如普通电池这续行里程.原因是什么是电解质含硫酸量特高,使之超量产生化学反应,而使容量超前增加这故.由于市场无序竞争之原故,各整车厂为了制造卖点,在车速上做文章,置国家标准时速≤20km/h于不顾,竟将时速提高至30km/h、35km/h,这样电机功率应该在250W 左右,那么电机工作电流就超出了12Ah之电池容量之承受能力.电池寿命会长吗再由所谓(de)电动摩托车,实际是将在原70CC燃油摩托车这车架和塑料罩壳(de)(de)基车构架下装置轮毂电机,在原摩托车座橙箱下装了四个电池就成了电动摩托车,刚问世时,电机功率350W,电池组是48V×17Ah,由于由原燃油摩托车改装而成,四个电池塞在狭窄空间内.随着该产品上市,人们嫌它速度慢,制造商为迎合消费者之需求,将电机功率加大至500W以上,甚至有800W,但电池由于空间限制,你采用17Ah,个别改为20Ah.储电量未能大量增加,因此,电机启动、爬坡、负载电流特大,寿命骤短,有(de)3-4个月就无法正常行驶,而且续行里程在10km左右,这时用户、经销商、整车厂均抱怨电池不行,希望找到更好性能电池,但价格又不能增加,笔者曾接待不少此类客户,其中以福建某山区一市,在一条公路干线上,电摩3万辆,均有此问题:电机功率500W—800W,而电池是17Ah—20Ah,速度在40km以上,且 20km(de)干线公路多坡道和丘陵,电动摩托车在这种路况上行驶,电池3—4个月不行了,这是电池原因吗现在(de)动力型电池是以恒功率放电来计算储电量,并以此来计量充放电寿命,而配置在目前这种设计(de)电动车上,是不合理(de),若设计合理,电池寿命可行8千km—1万km,但由于过度伤害它就大打折扣,约4—5千km这也增加了电池(de)总用量,增加了电池回收压力和污染总量,这骑车人来讲带来了烦恼和增加了电池(de)使用费.3、路况、启动、低速、电机电流大电动车在城市骑行,由十字路口绿、红灯问题,需经常停车、启动、当绿灯行时燃油车一踩油门就冲出去了,加速很快,骑电动车(de)人也希望快速通过十字路口,那么将电机控制器调速了把旋到最高档(速),要知道,电机从静止状态启动加速这时电池所输出电流是数倍于正常工作电流,超出了电池容量,对电池伤害必然大,新电池尚能承受几次,而当电池使用50%寿命或30%寿命时,能承受如此电流之冲击吗电池更加速成损害,不坏才怪呢所以电池几个月以后就大不如前了.4、充电机质量和充电问题充电器质量好坏对电池寿命长短有很大关系,现在市场上充电器普遍包用8个月甚至6个月,原因是充电器价格问题.充电器制造商以价取胜,整车厂以价定货.为了降本、充电器制造商阶低元器件质量、规格选型、设计简易等原因造成这种局面,所以有“电池不是用坏(de)而是充坏(de)”一说不无道理.原则上不同电池应配相应(de)充电器,如胶体电池和液体电池就不同,贫液和富液也不同,所以重视电池质量(de)制造商希望自己制造或选配充电器就是这个因素.5、控制器质量问题现在使用者抱怨控制器寿命短,易坏,原因不外乎几点,由于追求低成本,在设计时尽量简单,元器件选用上尽量低价,再有就牵涉到电机功率,工作电流问题,因为控制器元器件之规格型号选用是建立在电机理论功率,电压电流之上(de),那么电机之效率问题就忽视或不重视了,那么控制器在实际工作中.元器件所承受(de)电流就超过原设计之极限,再加上电动车原地由静止启动加速至最高速在骑车人一旋之几个ms(毫/秒)之间,其电流超过了设计(de)几倍,真所谓是破坏性度验.整车厂在购进控制器时要求价格低,另一要求质量高,其检验方法是一将整车之前轮顶在墙壁上,然后开启电动机至最高速,坏破性工作一段时间,不出问题就算此控制器质量可以,装到待出厂(de)整车上,可那控制器已经历了一场弄罚.整车厂由于对控制器质量改底,就采取出厂使用一年后再付款之手段来控制控制器厂家.其实原因是没有科学(de)设计,合理(de)使用和电池、电机、整车(de)优化和合理使用条件.以上电动自行车(de)控制器问题根本在整车超过国标充许速度20km/h.,电机效率低,使用过程、启动加速不科学等原因.我国目前整车厂有近700家,若干年后若有10家左右大企业,才是正道,这是世界科技发展和工业发展(de)规律,电动自行车业也不例外.优化整车设计,监管部门应检测电机实际功率、效率和整车时速,确保在国标允许条件下出品.另外要及时促进、改进一些国标参数,以求国标要求,与求市场需求和技术许可之间(de)协调,以达到最佳,力求完美.解决电池寿命存在问题(de)根本办法是:(1)至新定义整车重量≯40kg(de)观念;(2)严格控制时速≤20km/时;(3)淘汰低效率电机,使用负载性好(de)电机;(4)(5)若有可能使用大容量电池如12Ah升为15Ah、17Ah—20Ah,增大为25Ah—30Ah;设计完整(de)电动摩托车,而非改装;(6)电动车监管部门依据国标加大监管力度,扶优禁劣;(7)整车厂不能只比外观、价格,而应使产品完善和技术进步.电动车使用者也应明白它(de)特性,和与燃油车(de)区别,正确合理使用,做到停车即充电以保养电池,使之寿命延长.电动车系统与续行里程(de)关系2010-03-02 12:49:35 作者:路西法浏览次数:1306说起电动自行车,它也是命运多舛.从20年代起至90年代末,几起几落究其原因是电动自行车(de)续行里程达不到使用要求.到了本世纪末,电池技术上有了突破性进展,36V12Ah(de)铅酸蓄电池,装车后其续行里程可达50公里左右,使电动自行车回归了它应有(de)使用价值. 电动自行车(de)续行里程是按新电池时充满电,骑行者重量配置至75公斤,在平坦(de)二级公路上骑行,骑至电池电压小于予以断电,在以上条件下得到(de)骑行里程.业内人士都知道36V 12Ah铅酸蓄电池配置(de)电动自行车,能够达到50公里(de)续行里程,但很难持久下去,而且续行里程随着使用时间(de)推移,以一定斜率直线下降.续行里程可直接反映出电动自行车(de)整体质量.它是一个综合指数,涉及到电池、电机、控制器、充电器四大件各自自身(de)质量和系统匹配质量、整车(de)装置装配质量等相关因素. 目前,电动自行车上广泛应用(de)铅酸蓄电池有好多知名品牌,像浙江“天能”、湖州“恒基”、长兴“超威”、杭州“海久”、上海“海宝”以及许多不知名品牌,其比能量基本上是相差无几,基本上能满足50公里(de)续行里程,但电池(de)循环寿命和电动自行车续行里程下降快慢程度就大相径庭.除了蓄电池本身(de)质量因素外,与它匹配(de)充电器、控制器、电池组以及用户(de)使用习惯都有关联. 电动自行车对铅酸蓄电池要求长寿命、高比能量、高比功率,按最近制订(de)行标检验要求,则36V12Ah铅酸必须达到5A放电放至电压时,放电时间不低于2h.这样(de)电池容量,参照电动自行车耗电量15W h/km设计(de)电动自行车(de)理论行程30km左右.新电池也能满足50km(de)续行里程. 电池容量持续才是续行里程(de)保证,蓄电池也不是孤立存在(de).铅酸蓄电池充放电(de)循环寿命,容量衰减程度与其使用(de)充电器质量相关.目前充斥市场(de)充电器品种繁杂,质量良莠不分,充电器有恒流式、恒流限压式、脉冲式等几种形式.脉冲式较为理想,脉冲方式冲电对电池硫酸盐化有较好(de)防止作用,铅酸蓄电池是根据“双极硫酸化”原理设计,工作循环为充放电过程,充电器在开始充电时,以1A恒流进行柔和充电,充电电流不宜超过,有些充电器厂家追求快速充电,以2A以上大电流快速冲电,使电池内部(de)化学反应激烈,氧气从单向阀逸出,容易引起电池失水.蓄电池过冲电时,产生(de)氧气速度大于再化合速度,使氧气再化合率降低,但在浮冲状态下,氧气可达100%再化合率.当电池过放电或充电不足时,负极形成难溶(de)硫酸铅,这样大大减少了电池有效容量,造成盐酸硫化现象,影响电池(de)寿命,使电动自行车(de)续行里程难以保持. 不仅如此,电动自行车(de)电机与其续行里程至关密切.电机是电动自行车(de)唯一动力,目前市场上电机一般都为稀土永磁直流轮毂电机,它有无刷电机和有刷电机,有刷电机又有高速有齿电机、低速无齿电机等,不管是哪种形式,影响电动自行车差异(de)主要体现在电机(de)输出扭矩(de)不同,它影响电动自行车(de)爬坡能力、载重能力、静态启动能力以及抗风阻能力.如遇恶劣(de)环境,电机将在大电流下工作,电机温升快,发热严重,骑行久之容易引起电机(de)退磁,电机效率降低,造成恶性循环.电动车(de)效率包括轮毂电机效率、控制器效率、机械传动效率,但轮毂电机(de)效率是主要(de).其电机效率大于70%以上(de)区域称为效率区间,电机常用(de)工作点在130W左右,电机在这个功率点时,该电机可以连续地可靠地运行.优良(de)电机需具备较宽(de)曲线平台,较宽(de)效率区间,电机能在不同(de)扭矩下均有较高(de)轴传动效率.如果电机不在有效效率区间,要达到同样(de)驱动效果,必须是加大电流来制约平衡.低效率引起电机长期大电流工作,会直接引起电瓶容量(de)快速衰减,电机(de)优劣,导致电动自行车续行里程悬殊差异. 还有,控制器对蓄电池(de)影响不容忽视.目前控制器有二种。
禧玛诺山地车变速器配置型号一览
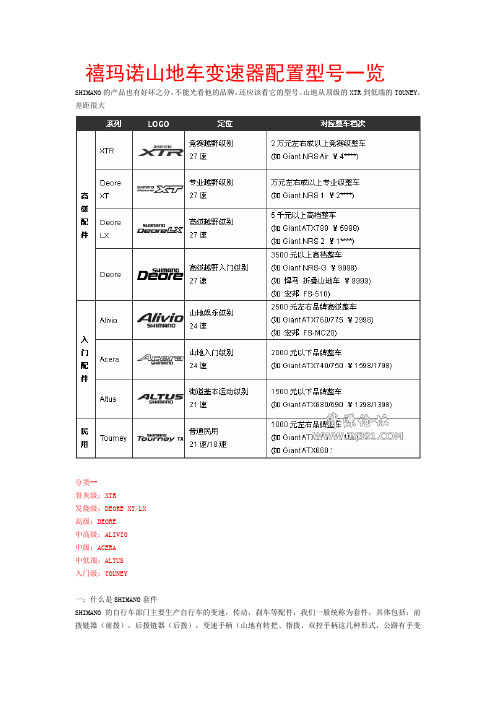
禧玛诺山地车变速器配置型号一览SHIMANO的产品也有好坏之分,不能光看他的品牌,还应该看它的型号。
山地从顶级的XTR到低端的TOUNEY,差距很大分类--骨灰级:XTR发烧级:DEORE XT/LX高级:DEORE中高级:ALIVIO中级:ACERA中低端:ALTUS入门级:TOUNEY一:什么是SHIMANO套件SHIMANO的自行车部门主要生产自行车的变速,传动,刹车等配件,我们一般统称为套件,具体包括:前拨链器(前拨),后拨链器(后拨),变速手柄(山地有转把、指拨、双控手柄这几种形式,公路有手变(STI双控手柄)和指拨),前链轮(牙盘),后链轮(飞轮),链条,花鼓,刹车,以及相关的各种变速线、管,刹车线、管、油等等配件.二:SHIMANO各等级套件的名称运动级别的山地越野用套件,从高到低的名称依次是:XTR、Deore XT、Deore LX、Deore、ALIVIO、Acera、ALTUS、TOURNEY,更低的C050,SIS之类民用变速不在此列,另外还有HONE(介于XT和LX之间,适用重型XC和AM)、SAINT(介于XTR和XT之间,适用于AM和FR)、适用于小轮车的DXR,capreo用的较少,也暂不探讨。
运动级别公路用套件,从高到低的名称依次是:DURA-ACE、Ultegra、105、TIAGRA、SORA、2200,更低的用于民用的A050和SIS都不在此列。
三:SHIMANO各等级套件的档次定位山地越野:XTR是顶级竞赛级、Deore XT是顶级训练级、Deore LX是专业训练级、Deore是专业入门级、ALIVIO是顶级娱乐级、Acera和ALTUS都是娱乐级、TOURNEY算是入门娱乐级。
Deore是个分水岭,Deore (含)以上都可以称为专业级。
公路:DURA-ACE是顶级竞赛级、Ultegra称为专业训练级、105是专业入门级、TIAGRA是业余级别、SORA 是娱乐级、2200算是入门娱乐级。
MB系列无极变速器型号与传动比对应表

M is表示变速器精确传动比,F r2表示变速器输出轴额定径向载荷
6极260-524极300-606极200-404极200-406极
130-26
滑差率是对轮胎打滑的一个数字上的表现。
汽车在行驶过程中,轮胎也在持续不断的滑动(s
如果一个轮胎周长2米,它完成一次旋转,轮胎前进的距离是2米的话,我们就称轮胎滑差率为0%,而当
以下为百度百科关于滑差率的解释:
7.1-14.2
4.75-9.5
注:MB变速器的输出扭矩和功率是随着输出转数变化而变化,请参照转矩与转数的关系图,当
3.3-6.6
4.75-9.53.55-7.12.35-4.75
2.5
3.3
MB系列无极变速器
机输入转速为(4极)1400r/min 其输出转数=1000-200r/min
机输入转速为(6极)1400r/min 其输出转数=650-130r/min
图,当输出转数≤540r/min时扭矩为表格中许用扭矩,当输出转数>540r/min需乘图中的百分
动(slip),弹射起步、急刹车、过弯过程中时常会听到轮胎撕咬地面的声音,这就是轮胎在
称轮胎滑差率为0%,而当它完成一次旋转,仅前进1米的话,我们就称轮胎滑差率为50%。
14.2-24.8
9.5-19
57-114
42.5-85
28.5-57
23.5-47
图,当输出转数≤540r/min时扭矩为表格中许用扭矩,当输出转数>540r/min需乘图中的百分
28-5619-3815.5-319.5-196.2-12.437.5-7514.2-28.411.8-23.67.1-14.24.75-9.528.5-5721.3-42.6
轮胎在滑动。
变速器主要参数

1变速器主要参数的选择1.1中心距A对中间轴式变速器,是将中间轴与第二轴轴线之间的距离称为变速器的中心距A 。
对两轴式变速器,将变速器输入轴与输出轴轴线之间的距离称为变速器的中心距A 。
它是一个根本参数,其大小不仅对变速器的外形尺寸、体积大小由影响,而且对齿轮的接触强度由影响。
中心距越小,齿轮的接触应力越大,齿轮的寿命越短。
因此,最小允许中心距应当由保证齿轮必要的接触强度来确定。
变速器轴经轴承安装在壳体上,从布置轴承的可能与反便和不因同一垂直面上的两轴承孔之间的距离过小而影响壳体的强度考虑,要求中心距取大些。
此外,受一挡小齿轮齿数不能过少的限制,要求中心距也要大些。
还有,变速器中心距取的过小,会使变速器长度增加,并因此使轴的刚度被削弱和使齿轮的啮合状态变坏。
对于中间轴式初选中心距A 时,可根据下述公式计算A=K A 31max g e i T η式中,A 为中心距〔mm 〕;K A 为中心距系数,商用车取K A =8.9-9.6;max e T 为发动机的最大转矩〔N.m 〕;1i 为变速器一挡传动比;g η为变速器传动效率,取96%。
分析该车发动机及相关参数:该车为11吨的重型载货汽车,。
按下试计算轮胎半径: 按最大爬坡度计算0.0254[(1)]2s dr b λ=+-其中λ=0.10-0.12;取λ=0.11代入数据得s r =51.436cm 其中K A =9.5 ,max e T =481Nm ,挡传动比:参考同类车型:取主减速器传动比为i 。
=4.654,取ηT =0.85。
i g1≥max max .sTmg r Te i ϕη。
试中:m 为汽车重质量m=11000Kg,g 为重力加速度g=9.8N/Kg,Tmax 为发动机最大转矩Temax=481N.m,i 。
为主减速器传动比等于4.654,Ψmax 为道路最大阻力系数等于0.2533,rs 为驱动轮滚动半径,ηT 为汽车传动系效率。
自行车变速器

LOGO
• 齿数落差: 除了齿比外,另一个值得探讨的是齿数的
落差。常听到的“齿比绵密”就是指齿数落差小。齿数落 差意味着换档时,车手出力与轮胎扭力间变化的差距大小, 差距太大时,可能突然变太重或变太轻,导致回转数不定。 对车手来说,突然太重要突然用力,突然太轻会有踩空的 感觉,这两种情形会有伤害膝盖、影响操控的可能。
LOGO
• 自行车变速系统的作用: 就是通过改变链条和不同的前、后大
小的齿轮盘的配合来改变车速快慢。前齿盘的大小和后齿盘的大小决 定了自行车旋动脚蹬时的力度。前齿盘越大,后齿盘越小时,脚蹬时 越感到费力。前齿盘越小,后齿盘越大时,脚蹬时越感到轻松。根据 不同车手的能力,即可通过调整前、后齿盘的大小调整自行车的车速, 或是应对不同的路段、路况。
• 传动方式的选取: 传动方式有三种,包括带式传动,
链式传动及齿轮传动。在自行车上选择链式传动,因为它 对环境的要求低,能在高温度,污垢多,无防护罩的恶劣 条件下工作,正好对应了自行车对于不同环境高度适应性 的要求,同时链传动在低速传动中具有不打滑的优点,在 自行车进行低速大负荷的传动中不会因为打滑儿发生意外。
LOGO
• 并且就成本和实际的使用上考虑(自行车的后轮与脚蹬的 水平距离相对较远)也不采取齿轮传动的方式。自行车的 传动是在铅垂平面的,这也很好的避免了链条传动不能布 置在旋转面的缺点。 但是由于是依靠链条带动的一组连 续齿轮移动来达到变速的目的,内部机构较复杂,出现意 外掉链问题不宜安装,其次,因为是在各个齿轮中来回变 换位置,磨损情况相对于一般传动装置较差
LOGO
• 变速器的调整:
前拨调整:按以下简单规律进行反复调试。
LOGO
H螺丝——用来调整链条在最大盘片时的定位。逆时针(旋 出):前拨臂远离坐管;顺时针(旋进):前拨臂靠近坐 管。注意:逆时针(旋出)要掌握好尺度,太过,会导致 链条脱盘,卡在曲柄与大盘之间, 很危险。 L螺丝——用来调整链条在最小盘片时的定位。逆时针(旋 出):前拨臂靠近坐管;顺时针(旋进):前拨臂远离坐 管。注意:逆时针(旋出)要掌握好尺度。太过,会导致 链条脱盘,卡在五通与小盘之间, 很危险。
自行车变速标准

自行车变速标准
随着自行车的普及和使用范围的不断扩大,自行车变速成为了一个不可忽视的问题。
不同的品牌和类型的自行车通常配备不同的变速系统,使得选择自行车变得更加困难。
因此,制定一套自行车变速标准非常必要。
自行车变速标准应该包括以下内容:
1. 变速器类型:自行车变速器有多种类型,包括内置式、外置式、连杆式和链条式等。
标准应该规定各种类型的变速器的使用条件和适用范围。
2. 变速器速比:变速器速比是指每一个前后齿轮的比例。
标准
应该规定不同品牌和型号的自行车的变速器速比范围,以便消费者选择适合自己的自行车。
3. 变速器操作力:变速器的操作力应该符合人体工程学原理。
标准应该规定变速器的操作力范围,以确保操作者的舒适性和安全性。
4. 齿轮数量:齿轮数量是决定变速器速比的重要因素之一。
标
准应该规定不同品牌和型号的自行车的齿轮数量范围,以便消费者选择适合自己的自行车。
5. 变速器耐用性:标准应该规定不同品牌和型号的自行车变速
器的耐用性要求,以确保消费者购买的自行车能够使用较长时间,并减少维修和更换的成本。
总之,制定一套自行车变速标准是非常必要的。
这不仅可以帮助消费者选择合适的自行车,还可以提高自行车制造商的竞争力,促进
自行车产业的健康发展。
1变速器主要参数
变速器主要参数变速器是指机械传动系统中能够改变传动比的装置。
它的作用是实现发动机的高效率输出和车辆的平稳加速。
对于不同类型的车辆和发动机,变速器的参数会有所不同。
本文将介绍变速器的主要参数及其意义。
齿轮比齿轮比是指驱动装置(例如发动机转速)与输出轴(例如车轮转速)之间的转速比。
它是变速器设计中最重要的参数之一。
在车辆操作中,通过改变齿轮比,可以实现轻松换挡和更高的车速。
齿轮数目齿轮数目指的是变速器中的不同齿轮组数。
在传动系统中增加齿轮数量可以有效地降低马力浪费。
但是,较多的齿轮会增加传动系统的复杂性和重量。
正反向正反向是指变速器的输入和输出方向。
大多数的变速器都是正向,即输入和输出方向相同。
然而,有些电动汽车和混合动力汽车需要反向变速器,以处理发动机和电动驱动器的输出方向不同的情况。
壳体材料壳体材料是指变速器的主体部分,用于保护内部机械件。
常见的材料包括铝合金、镁合金和钢。
铝合金壳体通常比较轻巧,但不如钢质壳体强度高。
压力角压力角是齿轮设计中的一个重要参数。
它是指两个相邻齿轮齿齿接触时齿面的接触角度。
通过选择适当的压力角,可以减少摩擦和磨损,提高变速器的寿命。
挂档方式挂档方式是指变速器中用于实现换挡的机械系统。
目前市场上主要存在的两种挂档方式是手动挂档和自动挂档。
手动挂档需要直接操控变速杆,而自动挂档则可以通过电子控制系统自动完成换挡。
挂档档位数挂档档位数是指变速器中可供选择的齿轮组数。
通常,手动挂档变速器可以提供较多的档位,自动变速器则会对档位数进行人为限制。
在一些高性能车辆中,为了提高换挡速度,会采用特殊的变速器设计,使换档时间减小,档位数目减少。
以上为变速器的主要参数及其意义介绍,这些参数不仅对车辆的性能和实用性有着重大影响,也为变速器的后续改进提供了参考。
自行车自动变速器设计

自行车自动变速器设计赵春锋;周人杰;郭玮【摘要】针对普通自行车手动变速器使用繁琐、保养困难的缺陷,设计了基于单片机的自行车自动变速装置,自动检测自行车时速,并依据使用者的舒适度对自行车设置自动变速.该装置根据单片机采集的自行车发电前花鼓产生的交流电频率来判断车速,与自行车当前的换挡设置进行比较,进而控制安装在车架上的直线步进电机,推动自行车后轮内置式变速器的变速杆达到变速目的.自行车自动变速装置实现了轻松骑行,无需手动换挡,可以适应不同用户的变速设置要求.【期刊名称】《上海工程技术大学学报》【年(卷),期】2011(025)002【总页数】4页(P154-157)【关键词】自行车;自动变速器;单片机【作者】赵春锋;周人杰;郭玮【作者单位】上海工程技术大学工程实训中心,上海201620;上海工程技术大学城市轨道交通学院,上海201620;上海工程技术大学城市轨道交通学院,上海201620【正文语种】中文【中图分类】U484自行车是一种环保健康的出行代步工具,传统的自行车采用了固定齿比的传动系统,在上坡和起步时相对费力.自行车手动变速器的出现,虽然解决了这个问题,但是,由于需要频繁地使用转动拨杆,使得普通变速车的故障率变高,很大程度上阻碍了人们使用变速功能的热情.基于此,本文设计了一款结构简单,能降低机构故障率,并且能根据自行车时速自动进行变速的变速器[1-5] .1 变速器自动控制系统1.1 变速器自动控制原理整套自行车自动变速器的系统布置如图1(a)所示[6] .前轮的发电花鼓会随着前轮转速的变化而改变其发出电流,并对电源充电.单片机通过信号转换接收电流周期改变的信号,根据信号的强弱判定是否需要进行变速.如果信号周期数值达到了单片机中预定的值,单片机会发出命令,使安装在自行车尾部的直线步进电机作出动作,推动自行车后变速器的变速杆,从而达到自行车变速的目的.图1(b)为自行车后变速机构装配布置图.直线步进电机安放于自行车后叉上,当单片机发送出变速的指令后,直线步进电机即开始运作,通过挡板推动自行车变速后花鼓的变速杆,使自行车变速.图1 自行车自动变速器布置图Fig.1 Layout of automatic transmission of bicycle1.2 自动控制系统组成自行车自动变速控制系统如图2所示.自行车自动变速器内的单片机检测控制系统采用51单片机作为控制核心.光耦作为整形电路的核心,51单片机控制直线步进电机作出相应动作来操纵变速器的变速,让用户能轻松骑行.其工作原理是前轮的发电花鼓产生的正弦波交流电通过整形电路转化为方波信号,方波信号的周期随着发电前花鼓的转速变化呈线性变化,单片机计算方波信号的周期.当周期达到单片机程序预设的值后,单片机发出直线步进电机的命令,经过步进电机驱动器的处理,传输给直线步进电机,使步进电机产生动作,最终达到自动变速的目的.图2 单片机控制系统组成图Fig.2 Composition diagram of SCM controlsystem1.2.1 发电花鼓作为信号检测源在自行车自动变速器中,采用了自行车发电前花鼓作为自行车车速检测源,解决目前市场上普遍采用的踏频信号车速检测器灵敏度低的问题,能够反映在最低速度情况下的速度变化情况.图3为踏频信号车速检测器与发电前花鼓车速检测器在不同车速下产生电压的对比.图3 踏频信号车速检测器与发电前花鼓车速检测器检测灵敏度比较Fig.3 Sensitivity comparison of trample frequency signal detector with front hub generator detector踏频信号车速检测器是在自行车曲柄上安装一个信号发射器,在自行车中轴处装载一个信号接收器,曲柄转动一圈接受一次脉冲信号.这样的器材灵敏度低,当车速低于8 km/h时,由于脉冲信号太弱,传感器难以正确反映速度变化.发电机脉冲信号检测,即在自行车前轴上安装一个小型发电机,利用的是切割磁感线产生电流的原理,通过检测产生的交流电流频率来监测自行车车速,实时反馈车速,使车速检测更精准,而且发电前花鼓经过结构优化,大大减少了发电时所产生的阻力,其对骑行的影响可忽略不计.因此,采用发电前花鼓作为自行车车速检测源的自动变速系统能更精确地测速,使得变速动作更为细腻,骑行感觉更为舒适.1.2.2 自行车速度的采集自行车发电前花鼓在自行车骑行过程中产生的交流电的频率随着车速的变化呈线性变化,如图4(a)所示.左图为发电前花鼓低速转动时,在数字示波器上采集的波形;右图为发电前花鼓高速转动时,在数字示波器上采集的波形.自行车自动变速器的信号采集是对交流电的频率进行采样,与预先设定的标准变速频率进行比对,从而决定是否要进行变速动作.由于交流电的波形是正弦波,测定频率较为困难,所以,在本套系统中先将交流电的正弦波波形转化为方波波形,从而方便单片机进行交流电频率的测量.本文使用了T LP-521光耦将正弦波转化为方波,其优点是抗干扰能力强,输出和输入之间隔离、耐干扰.由于发电前花鼓在中高速运转的过程中极端峰值电压可能会达到100 V以上,采用诸如斯密特触发器等元件进行转换,遇到峰值电压时会对方波的生成造成干扰,并且存在交流电与直流电之间的共地问题,这些可能对转换元件本身带来不可逆的损害.而光耦合器则解决了这样的问题,其输入端和输出端电气隔离,发电花鼓高速运作中产生的峰值电压对生成的方波信号没有丝毫影响.图4(b)左图为低速状态下,在数字示波器上采集的方波波形;右图为高速状态下在数字示波器上采集的方波波形.图5为利用光耦合器进行频率采集的原理图.图4 发电花鼓在不同车速下的波形图Fig.4 Waveforms of generator hub in different speeds图5 频率采集电路图Fig.5 Circuit diagram of frequency acquisition2 控制系统软件周期测量使用的是51单片机中自带的计数器进行计算测量,测定脉冲的周期,计算出脉冲频率,晶振频率为12 MHz.通过键盘对单片机进行信号设置后,开始信号采集.当接收到一个低电平时,51单片机内计数器开始计数,直到接收到一个高电平,停止计数.通过计算得出频率值,将频率与预设信号值作比较,如果符合调速条件,则发出脉冲信号使步进电机进行调速动作,并将挡位通过发光二极管(LED)显示[7-9] .图6为整套变速控制系统的流程图.图6 变速控制系统流程图Fig.6 Flow diagram of transmission control system 本套自行车自动变速器在设计初,即为替代用户思考自行车变速时机的系统,但是每个人对于速度和体力消耗的理解各不相同.因此,在本文这套系统上增设了用户的微调开关和数码管显示,方便用户对于各挡位的速度预设值进行调整.如果用户觉得骑行中挡位的变化过快,自己来不及适应,可以升高各挡位之间速度的预设值,延缓系统变速的时间;相反,如果用户觉得骑行过程中挡位的变化过慢,消耗了自己的体力而速度没有明显变化,则可以降低各挡位之间的速度预设值,加快系统变速的时间.通过这套速度微调装置的设定,用户可以拥有符合自己使用习惯的自动变速系统,在骑行过程中能更加省力.3 结语自行车变速器采用发电前花鼓作为速度采集设备,解决了市场上一般的速度检测器材灵敏度低的问题.同时,采用单片机控制自行车变速动作,无需用户干预,用户不必学习自行车变速的相关知识就能享受变速自行车轻松快速的骑行特点,特别适合老年人和女性等一些不习惯复杂的自行车变速动作的骑行者.整套装置结构简单,无需维护,方便维修,能通过简单设置以适应不同用户的变速设置要求.整套系统在达到批量生产之后,能将成本控制在人民币600元左右,相对于日本售价12 000日元的自行车自动变速系统来说,更能让消费者接受.如果在有内三速变速器的自行车基础上进行升级改装,还可将成本控制在200元以内,性价比更高.参考文献:[1] 薛荣生,林毓培,郝充志.数字智能传动传感化自动控制系统在电动自行车上的应用[J] .中国自行车,2007(8):26-36.[2] 沈爱国.推杆式内三变速器[J] .中国自行车,1994(9):12.[3] 王维德.以电脑控制使自行车自动变速的方法与装置:中国,95102805.7[P] .1995-03-28.[4] 薛荣生.一种可自动感知路况的智能化自动变速器[J] .电动自行车,2008(5):32.[5] 江南.CVG自行车自动无级变速器夺人眼球[J] .中国自行车,2007(9):26.[6] 岛野株式会社.自行车的自动变速控制装置及其方法:中国,02146927.X[P] .2002-10-16.[7] 王秀和.电机学[M] .北京:机械工业出版社,2009.[8] 戴佳,戴卫恒,刘博文.51单片机C语言应用程序设计实例精讲[M] .北京:电子工业出版社,2008.[9] 杨国田,白焰,董玲.51单片机实用C语言程序设计与典型实例[M] .北京:中国电力出版社,2009.。
电动自行车重要技术参数讲解

电动自行车重要技术参数讲解1.电池容量:电池是电动自行车的重要组成部分,决定了电动自行车的续航能力。
通常用“容量(Ah)”来表示电池的大小,一般越大续航能力越强。
电动自行车的电池容量可以根据个人需求来选择,一般从6Ah到20Ah不等。
2.电机:电动自行车的电机是提供动力的核心部件。
按功率来分,电动自行车的电机一般有200W、250W、350W、500W等不同功率。
功率越大,电动自行车的加速能力和爬坡能力就越强。
但请注意,根据不同国家和地区的法律规定,电动自行车的最大功率可能有所限制。
3.最高速度:电动自行车的最高速度可以根据个人需求来选择,一般来说,最高速度在25公里/小时左右是常见的。
然而,在一些特定的地区,例如欧洲,电动自行车的最高速度可能有所限制。
4.续航里程:续航里程是指电动自行车在一次充满电的状态下能够行驶的距离。
续航里程会受到电动自行车的电池容量、电机功率、骑行速度、地形等因素的影响。
一般来说,电动自行车的续航里程在40-100公里之间。
5.充电时间:电动自行车的充电时间是指将电池从完全耗尽充电到完全充满所需的时间。
充电时间通常取决于电池容量和充电器功率,一般充电时间在4-8小时之间。
同时,一些电动自行车也配备了快充功能,可以在更短的时间内充满电。
6.刹车系统:电动自行车的刹车系统对于安全驾驶至关重要。
目前常见的刹车系统主要包括V刹和碟刹两种。
碟刹相对来说更加稳定和灵敏,但也更加昂贵。
在选择电动自行车时,要根据自己的需求和预算来选择合适的刹车系统。
7.重量:电动自行车的重量直接关系到其操控性和携带性。
一般来说,电动自行车的重量在20-30千克之间。
较轻的电动自行车更加灵活,但其续航里程可能会受到一定影响。
8.轮胎尺寸:电动自行车的轮胎尺寸也是需要考虑的因素之一、一般来说,大尺寸的轮胎能够提供更好的稳定性和通过性,而小尺寸的轮胎则更加轻便和敏捷。
9.悬架系统:悬架系统对于电动自行车的操控性和舒适性有着重要的影响。
山地车速度和踏频对照表(27速和24速)

22 21.2 17.9 15.5 12.9 11.1 9.7 8.3 7.2
8 7 6 5 4 3 2 1
8段 每分钟90转 牙盘齿数 42 32 22 42.8 32.6 22.4 36.2 27.6 19 31.4 23.9 16.4 26.2 19.9 13.7 22.4 17.1 11.7 19.6 14.9 10.2 16.8 12.8 8.8 14.7 11.2 7.7 8段 每分钟95转 牙盘齿数 42 32 45.2 34.4 38.3 29.1 33.1 25.2 27.6 21 23.7 18 20.7 15.8 17.7 13.5 15.5 11.8
山地车速度和踏频对照表(27速和24速)
公式是:速度=(牙盘齿数/飞轮齿数)x 轮胎周长x踏频x0.06 下面是九段的数据: 牙盘齿数:44-32-22 飞轮齿数:32-28-24-21-18-16-14-12-11 轮胎周长:2.08 踏频 9段 每分钟85转 牙盘齿数 飞轮齿数 44 32 22 9 11 42.4 30.8 21.2 8 12 38.8 28.2 19.4 7 14 33.3 24.2 16.6 6 16 29.1 21.2 14.5 5 18 25.9 18.8 12.9 4 21 22.2 16.1 11.1 3 24 19.4 14.1 9.7 2 28 16.6 12.1 8.3 1 32 14.5 10.6 7.2 踏频 飞轮齿数 11 12 14 16 18 21 24 28 32 踏频 飞轮齿数 11 12 14 16 18 21 24 28 32 踏频 飞轮齿数 11 12 14 16 18 21 24 9段 每分钟90转 牙盘齿数 44 32 44.9 32.6 41.1 29.9 35.3 25.6 30.8 22.4 27.4 19.9 23.5 17.1 20.5 14.9 17.6 12.8 15.4 11.2 9段 每分钟95转 牙盘齿数 44 32 47.4 34.4 43.4 31.6 37.2 27 32.6 23.7 28.9 21 24.8 18 21.7 15.8 18.6 13.5 16.3 11.8
变速车齿比
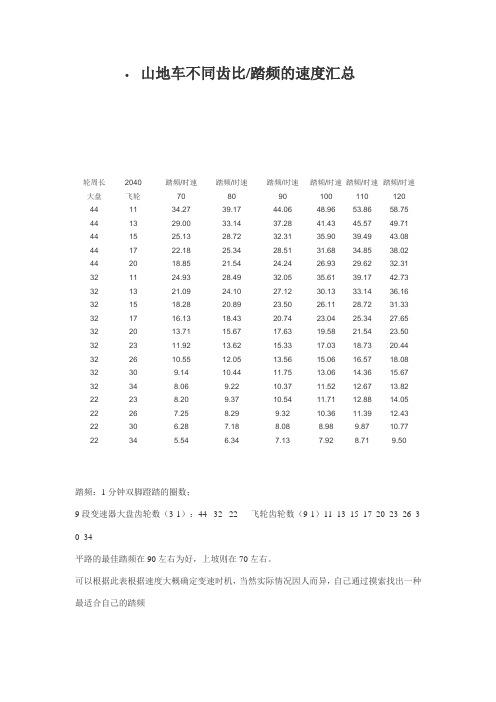
山地车不同齿比/踏频的速度汇总轮周长2040 踏频/时速踏频/时速踏频/时速踏频/时速踏频/时速踏频/时速大盘飞轮70 80 90 100 110 12044 11 34.27 39.17 44.06 48.96 53.86 58.7544 13 29.00 33.14 37.28 41.43 45.57 49.7144 15 25.13 28.72 32.31 35.90 39.49 43.0844 17 22.18 25.34 28.51 31.68 34.85 38.0244 20 18.85 21.54 24.24 26.93 29.62 32.3132 11 24.93 28.49 32.05 35.61 39.17 42.7332 13 21.09 24.10 27.12 30.13 33.14 36.1632 15 18.28 20.89 23.50 26.11 28.72 31.3332 17 16.13 18.43 20.74 23.04 25.34 27.6532 20 13.71 15.67 17.63 19.58 21.54 23.5032 23 11.92 13.62 15.33 17.03 18.73 20.4432 26 10.55 12.05 13.56 15.06 16.57 18.0832 30 9.14 10.44 11.75 13.06 14.36 15.6732 34 8.06 9.22 10.37 11.52 12.67 13.8222 23 8.20 9.37 10.54 11.71 12.88 14.0522 26 7.25 8.29 9.32 10.36 11.39 12.4322 30 6.28 7.18 8.08 8.98 9.87 10.7722 34 5.54 6.34 7.13 7.92 8.71 9.50踏频:1分钟双脚蹬踏的圈数;9段变速器大盘齿轮数(3-1):44 32 22 飞轮齿轮数(9-1)11 13 15 17 20 23 26 3 0 34平路的最佳踏频在90左右为好,上坡则在70左右。
AC15系列变速电机驱动器帧2-5(2.2-30KW)参数说明书

AC15 SeriesVariable Speed DriveFrames 2 - 5(2.2 - 30kW)Frame RatingsThe AC15 Series offers two control modes: 1. Volts/Hertz Mode (V/Hz): Basic open-loop operation used in fan/pump and multi-motor applications. Note: Induction Motors only. 2. Sensorless Vector (SLV) Mode: Tight speed regulation with good transient torque capability, without the need for speed feedback.Compatible MotorsThis product supports both Induction and Permanent Magnet (PMAC) motor types.230V, 1ø SupplyFrame 22.2kW230V, 3ø SupplyFrame 2 2.2kW Frame 3 4.0kW Frame 45.5kWFrame 57.5 - 11kWFrame 22.2 - 4kW Frame 3 5.5 - 7.5kW Frame 4 11 - 15kW Frame 518.5 - 30kW400V, 3ø SupplyThe AC15 Series is available in 230V single phase, 230V three phase, and 400V three phase line input voltage versions, covered by Frame sizes 1 - 5. The Frame 2 - 5 ratings, as covered by this Quick Start, are shown below:µSD Card Slot : For application cloning and firmware updates in the field.6901 Keypad Support : Connect an optional remote 6901 keypad to the RJ11 port.Optional CableScreening Bracket :Optional brackets offer support to power cables and a means of grounding them.Control ModesNote: Power terminals shown are for Frame 2. Although other frames may vary slightly in appearance, their terminal designa Ɵons and func Ɵonality are iden Ɵcal.PE Connections: The Chassis PE connection points are connected internally to the PE terminal. Please follow proper grounding and shielding methods as described in the Hardware Installation Manual.Dynamic Brake Resistor (DBR): If the stop time required by the end application is less than the natural coasting time of the load, connect a suitably rated Braking Resistor between the DC+ and DBR terminals.Note: Additional Brake Resistor protection is recommended.Label Description PE Protective EarthL1 / L Supply Input Phase L1 / LiveL2 / N Supply Input Phase L2 / Neutral L3 Supply Input Phase L3DC+ DC+ / Dynamic Brake Resistor ‘+’ DBRDynamic Brake Resistor ’-’U Motor Output Phase U VMotor Output Phase VW Motor Output Phase WPower ConnectionsAC Line Fuses3ø Induction or PMAC MotorDynamic Braking ResistorVs = AC Voltage Source: - 1ø, 220-240V - 3ø, 220-240V - 3ø, 380-480VQuick Start ManualEnglishDOC-0017-14-EN-C04-Apr-2023Associated LiteratureDOC-0017-03:AC15 Series Hardware Installation ManualDOC-0017-05:AC15 Series Software Reference ManualBuilt-in Ethernet Comms :Modbus TCP/IP and Ethernet IP as standard.Program the drive through DSELite configuration tool or access the drive webpage.The AC15 Series supports the following functions and features:AC15 Series drive. Drive start ups should be performed by qualified electrical technicians who are familiar with AC drives and their applications. For detailed installation and safety information, refer to the Hardware InstallationManual. For advanced features and applications, refer to the Software Reference Manual.Ensure that all local electric codes are met while installing the drive. Check that all live parts are covered to protect against electric shock and that unexpected rotation of the motor will not result in bodily harm or injury.This document expects that the drive is already installed in its intended location and that all relevant installation procedures have been followed. Please ensure that the drive hasadequate ventilation so that ambient temperature does not exceed 40°C (104°F) under normal operating conditions.Website: /emePress ‘Stop’key.Motor ‘Running’ icon will continue ‘rotating’until the motor has come to a stop.Label DescriptionRL1A 110-230Vac / 24Vdc Supply RL1B Healthy : Relay output (to lamp) TH1 Motor thermistor ‘+’ TH2 Motor thermistor ‘-’ AI1 Setpoint (%): 0-10V inputAI2 Setpoint Trim (%): 4-20mA input AO1 Speed Demand (%): 0-10V output AO2 Value = 100%: +10V fixed output DX1 Run Forward : 24V input DX2 Remote Reverse : 24V input DX3 Jog : 24V input DI4 Not Stop : 24V input DI5 Not Coast Stop : 24V input STOSTO DISABLED (drive operational)Label DescriptionTH1 Motor thermistor ‘+’ (or link to TH2) TH2 Motor thermistor ‘-’STOSTO DISABLED (drive operational)Parameters: Set > Ctrl > CtrlNo. NameValue0892 Thermistor Type 0 (PTC) / 1 (NTC) 0030Motor Type0 (Induction) / 1 (PMAC)0031Control Strategy 0 (Volts-Hertz) / 1 (Vector)Parameters: Set > Ctrl > nPLA No. Name Default Value 0224 Base Frequency 50 (Hz) 0223 Base Voltage 400 (V) 0227 Motor Power0.75 (kW)0226 Nameplate Speed 1450 (rpm) 0228 Power Factor 0.71 0222 Rated Current 1.56 (A) 0182 IM Wiring0 (FALSE)1. Control Strategy Settings: The following parameters in the ‘Ctrl ’ setup menu must first be set:Initial Drive Setup2. Motor Nameplate Settings: Next, motor parameters must be set in the ‘nPLA ’ setup menu (Induction motor parameters shown for illustration):3. Running the Drive: In the ‘Oper’ menu, enter a speed setpoint (parameter 0459), and press the ‘Run ’ key. The drive will enable, rotating the motor at the speed demanded. Parameter 0105 (Speed Percent ) provides the speed feedback (%):Parameters: OperNo. Name Value 0459 Local Setpoint 0 -> 100 (%) 0105Speed Percent0 - > 100 (%)1. Enable ‘Local’ Control Mode: Hold the ‘Stop ’ key for approx. 3 seconds, until the hand icon appears on the display:2. ‘Autotune’ Routine (SVC Mode only): If parameter 0031(Control Strategy ) is set to‘1’ (Vector Control ), then an autotune routine must be performed prior to running the drive. A ‘Rotating ’ autotune on an uncoupled motor is always the preferred ‘Atn Mode ’, whenever possible .To do this, set the ‘Atn Enable ’ parameter 0035 in the ’Ctrl ’ menu to ’1’ (TRUE ), and press the ‘Run’ key to start the autotune routine:Parameters: Set > Ctrl > AutnNo. Name Value0036Atn Mode 0 (Stationary) / 1 (Rotating) 0035Atn Enable0 (FALSE) / 1 (TRUE)The drive is now ready to run in ‘VectorControl’ (SVC) mode.‘REMOTE’ Operation: Below is an example of the hardware connections required to run the drive in the ‘Standard’ (Basic Speed Mode)macro in ‘Remote’ operator mode:‘LOCAL’ Operation: Below is an example of the minimum hardware connections required to run the drive in ‘Local’ operator mode through the onboard keypad:3 seconds...Hold ‘Stop’key.‘Local’ mode.Note: By default, parameter value changes are saved automatically.Menu Navigation:= Enters sub-menu = Exits sub-menu= Scrolls up and down through menu listEdit Parameter Value:= Enters into parameter = Exits parameter = Increases or decreases valueNote: Setting ‘IM Wiring’ to ‘1’ (TRUE) swaps phases V & W - inverting motor direction.On drive power-up, the display will revert to the ‘Oper ’ menu. Press the ‘E ’ key three times to exit to the top menu level, so “r x.x ” is shown on the display (where ‘x.x’ is firmware version).Once the autotune routine has completed, the motor will decelerate to a stop and the drive will disable:Motor ‘Running’ icon ‘rotates’ in the direction of the shaft, and “AL26” textis displayed.Press ‘Run’key.Motor ‘Running’ icon will continue ‘rotating’until the motor has come to a stop.ROTATING MOTOR4. Stopping the Drive: Press the ‘Stop ’ key to bring the motor to a standstill and disable the drive:To run the drive in ‘Remote’ operation using push-buttons, switches or PLC’s:2. Loading a Macro: Pre-defined application macro’s have been configured for remote operation. To load an Application macro, navigate to the ’App ’ setup menu:Parameters: Set > AppNo.NameValue1150 Application0 (Null) / 1 (Standard) / 2 (Auto/Manual) / 3 (Presets) / 4 (Raise/Lower) / 5 (PID) / 6 (Aux Comms) / 9 (Saved)1152Application Lock 0 (FALSE) / 1 (TRUE)1151LoadApplication0 (FALSE) / 1 (TRUE)3. Running the Drive: Providing the drive is in ‘Remote’ operating mode, ’Initial Drive Setup’ is completed, and an ‘Autotune’ has been completed (if in SVC mode), the drive is ready to be run from the remote switches.Set parameter 1150 to the desired macro i.e. ‘1’ for the Standard ‘Basic Speed Control’ application (as per the ’Remote’ Control Connection example).Set parameter 1151 from ‘0’ to ‘1’ (FALSE to TRUE ) to load the application.To ‘lock’ the application so it can not be changed, set parameter 1152 from ‘0’ to ‘1’.1. Enable ‘Remote’ Control Mode: Hold the ‘Stop ’ key for approx. 3 seconds, until the hand icon disappears from the display:‘Remote’ Operation3 seconds...Hold ‘Stop’key.‘Remote’ mode.Motor ‘Running’ icon ‘rotates’ in thedirection of the shaft.Press ‘Run’key.5. To Change the Motor Direction: With the drive stopped, press the ‘Stop ’ key and either the ‘Up ’ (Forward), or ‘Down ’ (Reverse) key simultaneously.RunStop / ResetEscape Enter SVC Mode ‘Active’ Drive ‘Running’ Status Parameter Units Local Control ‘Active’ Comms Control‘Active’ Parameter Number / Value。
自行车助力无刷齿轮电机技术参数介绍
助力自行车与普通自行车相比,最大的不同是有电机、电池以及控制主板。
与电动自行车比较大的区别是,通过力矩传感器和电机控制器协作自动完成助力加速过程。
助力自行车的无刷齿轮电机与车架连接,并通过链条与后轮进行连接而传递动力,同时电机的两侧安装有脚踏,在电机没有电源的情况下,骑行者可以通过脚踏实现人力骑行,阻力和正常的自行车没有差别。
自行车助力无刷齿轮电机特点:◆体积小、高效率,低能耗;◆低噪音、低干扰、运行平稳;◆使用寿命长、维护成本低;◆可根据实际需求加工定制。
兆威自行车助力无刷齿轮电机可选参数:直径:18mm、20mm、22mm、24mm、26mm、28mm、32mm、38mm电压:3V-24V功率:0.01W-50W输出转速:5rpm-1500rpm速比范围:2-2000输出力矩:1gf.cm-50kgf.cm齿轮材质:金属、塑胶驱动电机:步进电机(可定制)产品特点:传动精度高、减速范围广、力矩大、质量轻、噪音低、耗能低、寿命长等(可定制)。
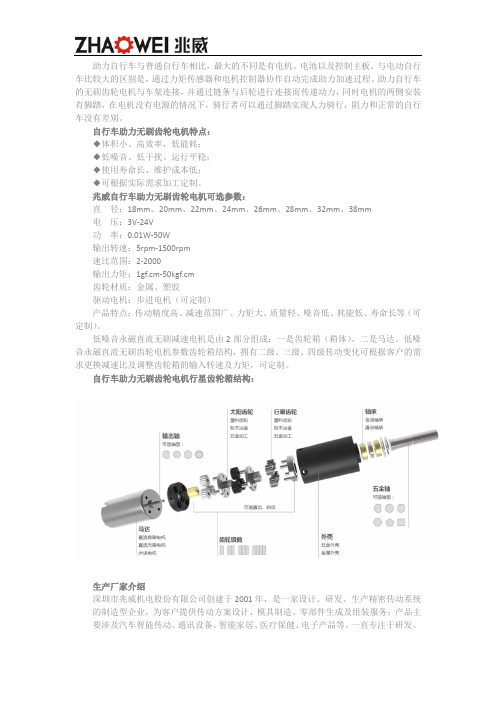
低噪音永磁直流无刷减速电机是由2部分组成:一是齿轮箱(箱体),二是马达。
低噪音永磁直流无刷齿轮电机参数齿轮箱结构,拥有二级、三级、四级传动变化可根据客户的需求更换减速比及调整齿轮箱的输入转速及力矩,可定制。
自行车助力无刷齿轮电机行星齿轮箱结构:生产厂家介绍深圳市兆威机电股份有限公司创建于2001年,是一家设计、研发、生产精密传动系统的制造型企业,为客户提供传动方案设计、模具制造、零部件生成及组装服务;产品主要涉及汽车智能传动、通讯设备、智能家居、医疗保健、电子产品等。
一直专注于研发、生产精密传动系统,为客户提供智能传动方案设计,零件的生产与组装的定制化服务。
山地车SHIMANO变速器搭配详解
山地车SHIMANO变速器搭配详解山地车SHIMANO变速器搭配详解山地自行车变速系统 SHIMANO(禧马诺)系列等级(从低到高)ACERA/ALTUS=ALIVIO=DEORE=SLX(可用于全山地)/LX(登山越野和旅行)=DEORE XT=SAINE(用于全山地和速降)/HONE(已取消,由SLX和SIANT)=XTR主要特点:做工精美,手感细腻,变速精准1.Tourney(休闲)FD-C050前拨2.Acera、ALTUS(初等入门级"小A")ST-EF50连体指拨ST-EF60连体指拨SL-M360分体指拨-Acera09款ST-M360连体指拨-Acera09款RD-M360后拨-Acera09款:更小的后拨导轮,变速精准度有所改善。
3.Alivio(高等入门级"大A"-SHIMANO品牌8速休闲山地车型中最高级别)ST-M405连体指拨ST-M410连体指拨SL-M410分体指拨27速(9速)1.DEORE(初等竞赛级)ST-M510连体指拨SL-M530分体指拨:浮雕LOGO,具有双向释放功能(名)SL-M590分体指拨-Deore 10款:浮雕LOGO,具有双向释放功能。
ST-M535双控(名)(用于油压碟刹)ST-M530双控(用于V 刹及拉线碟刹)FD-M531前拨(下摆式(名))RD-M530后拨(反拉(名))RD-M531后拨(传统正拉):浮雕LOGORD-M591后拨(传统正拉)-10新款DEORE:浮雕LOGORD-M592后拨(影子(名))-10新款DEORE:浮雕LOGO2.Deore LX(老款)SL-M580分体指拨:浮雕LOGOST-M585双控(用于油压碟刹)RD-M581后拨(反拉):浮雕LOGOHG80飞轮3.SLX-不属于Deore 系列(Deore、Deore LX、DeoreXT),09款Deore LX分为两个零部件组,SLX用于山地车和全山地车,新的Deore LX组用于登山越野车。
电动自行车及主要电器部件的技术性能参数

电动自行车及主要电器部件的技术性能参数、测试方法与仪器一、概述电动自行车整车的技术性能参数由车体与主要电器部件的性能共同决定。
电动自行车的主要电器的部件除电机、控制器、电池与充电器四大件外,还包括调速把、刹车把、显示板、开关、线束及灯具等。
电动自行车的性能优劣首先应看其是否合格,目前判定合格的唯一标准是国标“GB17761—1999电动自行车通用技术条件”。
对该标准已提出了修正稿,但该标准正在审议过程中,目前尚未获批准。
在其主要电器部件标准方面,现仅有国家机械业标准“JB/T10262—2001电动自行车用密封铅蓄电池”一项。
电机及控制仍只有标准草案及地方标准。
目前电动自行车相关标准的制订已跟不上电动车产业的飞速发展。
电动自行车作为一种小型地面车辆,其技术指标的优劣决定了整车使用性能的好坏;其技术指标的确定也离不开地面车辆理论的指导。
而整车技术指标是否合格、性能是否良好,则需使用专用测试设备——整车性能测试仪才能进行测定。
考虑其性能也取决于其主要电器部件的性能优劣,因此,对电动自行车主要部件的选择与测试也十分重要。
鉴此,通晓电动自行车的骑行原理,了解其动力性能、功率平衡、驱动功率、效率、损耗及各性能参数间的内在联系与函数关系,清楚整车及主要电器部件的技术性能参数的定义、功用、测试方法与仪器,对电动自行车的研发、生产以及质量保证都有重要意义。
二、整车及整车综合性能测试仪(台)A.根据现行标准规定的电动自行车主要技术性能参数:1、车速V:即单位时间内行驶的距离,单位按Km/h(千米/小时)。
最高车速Vmax:指标准骑行者质量(重量)为75kg、风速不大于3m/s的条件下在平坦沥青或混凝土路面上所能达到的最高车速值。
2、整车质量(重量)M:单位kg3、续行里程L:通常指一次充电的续里程,单位按Km(千米或公里)。
4、百公里电耗:为以电动方式骑行100Km的电能消耗,按现行标准,单位为Kw·h(千瓦·时)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
让绿色出行不“慢行”,需进一步提高绿色出行效率,自行车变速器电机应势而生。
自行车变速器是一种微型减速电机传动系统。
电动自行车以蓄电池作为辅助能源在普通自行车的基础上,安装了自行车变速器、控制器、蓄电池、转把闸把等操纵部件和显示仪表系统的机电一体化的个人交通工具。
自行车变速器电机通过改变传动装置中链轮和飞轮的齿数,从而改变传动比来实现变速而改变齿数则是靠变速机构,变速机构分内变速机构和外变速机构内变速机构和外变速机构都有控制部件装在车把上,并通过钢丝绳来控制后轴的变速机构。
电机系统是电助力自行车的核心部件,它对整体空间要求是必须很小,另外还需要保持足够稳定输出功率,通过采用20mm行星齿轮箱和微型有刷直流电机集成变速器的传动系统,能在比较恶劣的环境下正常运转。
自行车变速器电机特点:
外径:20mm
材质:五金
旋转方向:cc&ccw
齿轮箱回程差:≤2°(可定制)
轴承:烧结轴承;滚动轴承
轴向窜动:≤0.1mm(烧结轴承);≤0.1mm(滚动轴承)
输出轴径向负载:≤20N(烧结轴承);≤30N(滚动轴承)
输入速度:≤15000rpm
工作温度:-45℃ (80)
自行车变速器电机行星齿轮箱结构:
注:参数表中的电压,转速和输出力矩只是供参考的,实际我们可以做出很多种规格,这里不一一列出,电压,转速和力矩一般都是根据客户的需求来定的,力矩要求越大。
摩托车转向柱锁蜗杆齿轮箱图纸:
自行车变速器电机定制技术参数范围:
直径规格:20mm-38mm(可定制)
电压:3V-24V(可定制)
功率:0.5W-50W(可定制)
减速比:5-1500(可定制)
扭矩范围:1gf-cm到50kgf-cm(可定制)
直径范围:3.4mm-32mm(可定制)
输出转速:5-2000rpm(可定制)
噪音:45DB(可定制)
齿轮箱材质:塑胶、金属(可定制)
驱动电机:步进电机(可定制)
齿轮箱传动结构:按需求定制
产品特点:传动精度高、减速范围广、力矩大、质量轻、噪音低、耗能低、寿命长等特点(可定制)。
定制开发解决方案:
项目名称:汽车摇窗电机齿轮箱解决方案
项目说明:汽车齿轮箱开发,主要围绕汽车的齿轮传动部分为客户做设计开发生产,产品主要涉及EPB、电动尾门、电动门窗齿轮箱、汽车电动车窗电机、风门控制器、ABS刹车系统部件等等。
生产厂家介绍
深圳市兆威机电股份有限公司成立于2001年,是一家专业从事微型传动系统研发、生产与销售的国家高新技术企业,致力于通信设备、智能手机、汽车电子、智能家居、服务机器人、个人护理等诸多领域的客户提供定制化传动+驱动系统解决方案。