_GPS-RTK配合测深仪在水下测量中的应用
RTK GPS技术在水深测量的运用
RTK GPS技术在水深测量的运用RTK GPS技术的应用,可以提升水深测量的工作效益,让水深测量工作更加的具备效益、效率,其不失为一种先进的测量技术,必将得到更加广泛的应用。
一、RTK的原理。
RTK(Real Time Kinematic实时动态测量)即在基准站上安置一台GPS接收机,对卫星进行连续观测,并通过无线电设备实时地将观测数据及测站坐标信息传送给流动站,流动站一方面同步观测采集GPS卫星载波相对数据,另一方面通过无线电接收设备接收基准站传送的载波相对观测值、伪距观测值等数据,根据相对定位原理进行数据处理,实时地以厘米级(毫米级)的精度给出流动站三维坐标。
1、数据采集。
根据内河航道状况,在大比例尺的航道地形图上,设计好剖面线,把航道地形数据输入到设计好的计算机软件中。
CORS技术主要是用于定位,由于其平面定位时间短,定位精度高,在水面测量更有其优势。
在航道测区内,我们先根据区域的地方坐标系统信息计算好坐标系统的转换参数,在GPS的支持软件内设置好这些参数,根据测深仪、CORS采集的数据格式特点,可利用微机接口程序将其两种仪器的实时采集数据同步存储于设计好的计算机软件中。
在实际应用中,计算机软件一般有着对航道地形图数据的实时显示和修改的功能、与GPS 接口对GPS定位点实时显示的功能、与测深仪接口对测深数据实时显示的功能,并有对测深仪及GPS数据实时同步记录的功能。
由于CORS技术在高程定位上有着很大缺陷,其需要精密的大地水准模型,与卫星观测条件也有着很大的关系,故航道测量只需要在不同测段内对水位进行实时的观测记录,依照水位标高、水深数据来求得航道河底标高。
在河流水流较急,浪较大的时候,还需要对涌浪数据进行观测记录,以便对工作水位进行改正。
这样有了水面高程和水深数据,即可算出航道河底的高程数据了。
2、数据处理。
根据野外采集水深数据、水面高程,河底高程的计算方法应为:H=H’-D(1)水下地形点的高程H等于测深时的水位H’减去测得的水深值D。
GPS RTK在水利工程水下地形测量中的应用
浅谈GPS RTK在水利工程水下地形测量中的应用摘要:本文简单介绍了gps、rtk技术水下地形测量系统的原理及在水下地形测量中的一般步骤程序,并结合中海达测深仪在水利工程中的应用,重点通过对rtk技术在水下地形测量中影响精度因素的分析,提出了相应的应对措施,从而对质量进行有效控制,最大限度地避免重测现象的发生。
摘要:地形测量系统;操作程序;系统特点1 前言我公司主要业务是采用挖泥船进行水利工程中河道工程的疏浚和扩挖,因此,经常要进行河道水下地形测量,以掌握河道疏浚工程质量。
并且工程完工验收,也是需要进行大范围的河道水下地形测量。
水利工程测量较其它工程有许多不同点:(1)水利工程多位于相对偏远的地区,已知控制点少;(2)测量区域一般由分散的水工建筑物或带状河道组成;(3)建筑物测量要求精度高,河道测量精度不高;(4)工作条件复杂,通视条件差,河道测量工作中经常遇到树木遮挡,水上测量困难。
以往的水利工程水下地形测量,主要采用断面索(测绳)或水准仪视距法或经纬仪交会定位,利用测深锤测量水深,该测量方法不仅操作困难、投入人力多、效率低,受气象的影响大,外业测量人员很艰苦,成图时间长,而且精度差。
随着工程测量数字化技术和设备的不断推广应用,近几年,采用超声波测深仪和 gps 全球定位仪组成水下地形测量系统,能十分方便、快捷、高效、精确地进行河道河床水下地形观测。
2 gps rtk水下地形测量系统组成河床水下地形观测主要是测量各观测点的水平位置和相应的水深,并通过水位等数据来推算各测点相应的高程,从而绘制出河床断面图或水下地形图。
以往对断面宽在 100 m 之内的河道,主要通过拉过河断面索法来测量各测点的水平位置,而对于河道较宽,拉过河断面索困难的河道测量,往往采用水准仪视距法或经纬仪交会法。
对水深往往采用测深锤、测深杆、铅鱼等方法测量,然后通过相应的水位计算出各测点的高程。
采用上述方式进行测量,不仅测量困难,工作效率比较低,而且受水流、风浪等因素影响,测量精度也不高。
GPS-RTK技术配合数字测深仪进行水下地形测量方法的应用
GPS-RTK技术配合数字测深仪进行水下地形测量方法的应用魏大泉【摘要】在进行水下地形测量的过程中,采用GPS-RTK技术是比较常见的。
主要是由于这种技术类型本身的先进性比较强,可以相关的数字测深仪设备相互结合。
操作方式比较简单,而且准确性比较突出。
在具体的应用中,工作人员可以严格地按照设计的原则来进行水下的地形的特点进行掌握。
采用这种先进的测量技术作为辅助,可以将相关的数据直接应用到制图软件当中,不仅保证了数据采集的精准度,还推进了测量设备的高效应用,本文中,笔者主要对GPS-RTK技术在水下地形测量工作中的应用情况进行深入介绍,仅供参考。
【期刊名称】《黑龙江科技信息》【年(卷),期】2015(000)025【总页数】1页(P109-109)【关键词】GPS-RTK测量技术;数字测深仪;水下地形测量【作者】魏大泉【作者单位】黑龙江省航务勘察设计院,黑龙江哈尔滨 150001【正文语种】中文具体来说,水下地形测量工作的主要工作内容包含两个方面的内容,第一是定位,第二是测深。
从传统的测量方式中可以看出,主要是采用全站仪等设备来对水下的地形进行测量,进而获得科学准确的坐标,然后根据测深杆设备的测量来获得具体的深度数据。
然后根据相对比较明确的位置来对水下的高程进行明确。
现如今,随着GPS技术的高效发展,水下地形测量效果也得到了高效地改进,最终成图的精准度也比较大。
1 水下地形测量作业系统的组成从水下地形测量工作中可以看出,在整个测量系统中涉及到的设备较多,其中包括GPS-RTK测量接收机,数字化测深仪和便携式的计算机设备等。
具体的测量工作主要包括几个不同的阶段,第一是测前的准备,第二是数据的采集测量,第三是水下地形图的设计。
2 测前准备在这一阶段中,工作人员的主要工作内容就是求得转换参数。
在具体的准备工作中,主要是应用测区内部的几个平面位置,相关的高程控制点和相关的经纬度参数。
在实际的测量工作中,主要采用的是RTK软件来获得具体的参数,这些参数是测深仪在测量的过程中所需要的主要参数。
RTK与测深技术在水下地形测量中的应用
RTK与测深技术在水下地形测量中的应用作者:林鸿亚来源:《环球市场信息导报》2011年第11期简要介绍了利用GPS-RTK与测深技术测定水下地形的基本原理和工作流程以及影响测量精度的关键因素。
GPS-RTK;测深仪;水下地形测量1.引言GPS技术的出现,带来了测量方法的革新,在大地控制测量、精密工程测量及变形监测等应用中形成了具有很大优势的实用化方案。
尤其是GPS-RTK技术能够在野外实时得到厘米级定位精度,为工程放样、地形测图、地籍及房地产测量、水下地形测量等带来了新的作业方法,极大地提高了野外作业效率,是GPS应用的里程碑。
特别是利用RTK与测深技术,组成GPS-RTK和测深仪联合作业系统进行水下地形测量,在实际海洋勘察中取得了显著的效果。
2.信标机的基本原理信标机是可以自动选择信标台的双通道接收机,集无线电信标接受和载波相位接受与一体,定位无需投资基准站设备,即可实现导航与测量,并不受地域限制提供亚米级差分定位精度,但其有自身的不足,不可以实时测定其位置的高程,其高程采用验潮的方法来修正和确定,在实际应用中,验潮的时间间隔长短与数据误差成正比。
验潮的误差源主要有三个方面:目测的误差;测量船在风浪作用下的升降位置⊿h不均匀造成的高程误差;潮位改正,为了正确的表示海底地形,需要将瞬时海面测得的深度,计算至平均海面、深度基准面起算的深度,这一归算过程称为潮汐改正。
在验潮站的作用范围内,瞬时水面的潮汐可通过诸验潮站的潮位观测值内插获得,即潮汐内插。
回归法内插潮汐实质上是将潮汐的瞬间变化看作时间的多项式函数T(t),利用N个观测间隔⊿t的潮位观测值内插出N⊿t时段的潮汐变化曲线,该曲线即反映了该时段潮汐变化的特征。
其解决办法为:多人多次进行观测,取平均值,测量的船的前行速度在一定范围之内并保持匀速,方可减小系统误差和偶然误差。
因信标仪的定位精度不高、验潮的精度差和比较烦琐而显得不足。
GPS-RTK技术出现后取代了信标机位置。
GPS-RTK与测深技术在近海井场水下地形测量中的应用
庚
( 解放 军 9 2 9 4 1 部 队 葫 芦 岛 1 2 5 0 0 1 )
摘
要
主要介绍 了利用 GP S - RT K 与测深技 术测量 水下 地形 的基 本原理 和作 业步 骤。通 过对渤 海湾 某海 区井场 进行 测量 , 说 明 GP S RTK; 测深仪 ;水下地形测 量
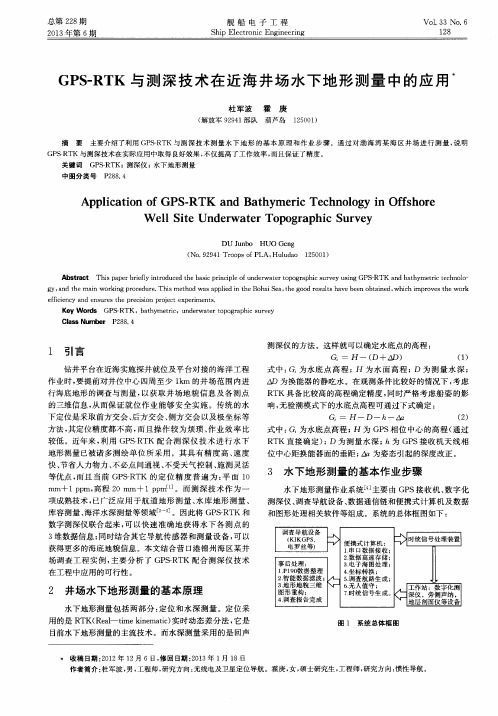
3 水 下地形测量的基本作业步骤
水下地形测 量作 业系统 ] 主要 由 GP S接 收机 、 数字化
测深仪 、 调查导航设备 、 数 据通 信链 和便携式计算 机及数据
和图形处理 相关 软件等组成 。系统的总体框 图如下 :
库 容测 量、 海洋水深测量等领域 _ 2 ] 。因此将 G P S - RT K和 数 字测 深仪 联合 起来 , 可 以快 速准 确地 获得水 下各测 点 的 3 维数据信息 ; 同时结合其它导 航传感 器和测 量设备 , 可 以 获得更 多的海底 地貌信息 。本文结合营 口港锦 州海 区某井 场调查 工程 实例 , 主要 分析 了 GP S - R T K 配合 测深仪 技术 在工程中应用的可行性 。
W e l l S i t e Und e r wa t e r To po g r a p hi c S ur v e y
DU J u n b o HUO Ge ng
( No . 9 2 9 41 Tr oo ps o f PLA , Hu l u d a o 1 2 5 0 0 1 )
G — H — D — h一 ( 2 )
方法 , 其定位精度都不 高 , 而且操 作较 为烦琐 、 作Байду номын сангаас业效 率 比
较低 。近年来 , 利用 G P S - R T K 配合测 深仪 技 术进 行 水下 地形测量 已被诸 多测绘 单位 所采用 。其具 有精度 高 、 速度 快、 节省人力物力 、 不 必点间通视 、 不受 天气 控制 、 施测灵活 等优点 , 而且 当前 GP S - R TK 的定 位 精度 普 遍 为 : 平面 1 O mm+1 p p m, 高程 2 0 1 T i m+1 p p 。而测 深技 术作 为一
GPS-RTK结合测深仪在水下地形测量中的应用
GPS-RTK结合测深仪在水下地形测量中的应用摘要随着GPS技术的快速发展,应用于工程测量越来越普及,使用移动测量的用户空间越来越大,方便快捷、高精度和定位准确的性能愈显其优越性,将GPS技术与测深仪技术相结合,是水下地形测量技术的一次飞跃,是先进的科学技术在生产活动中的重要应用。
关键词地下地形测量;测深仪;GPS-RTK1 概述1.1 水下地形测量的重要性随着工程建设的需要和工程开发,越来越多的需要进行水下地形测量,掌握规划、设计的资料,为工程建设提供技术支撑。
在水利建设中的河道、港口开发、水库库容复核等都要进行水下地形测量,随着社会对海洋的开发利用,海域测量同样越来越多。
在水下地形测量中对质量要求同样越来越高,这就需要在进行水下地形测量中使用新仪器、新技术,来减轻工作人员的劳动强度。
测量工作在防洪减灾中发挥重要作用,具有很大的社会效益和经济效益。
1.2 GPS-RTK技术简介GPS-RTK系统主要由基准站、流动站、数据通讯系统3部分组成。
GPS-RTK 是以载波相位观测量为依据的实时差分测量技术,它实时地获得测站点在特定坐标系中的三维坐标。
流动站是在获得固定解后接收基准站的数据,能够迅速及时的获得所需点的坐标,测量精度达到厘米级,能够满足设计和规划的精度要求。
这样就极大地扩展了作业距离,提高工作效率。
1.3 测深仪技术简介测深仪利用水声换能器发出超声波在均匀介质中直线传播,在遇到不同的介质反射的原理。
在测量时需将换能器发在水下一定位置,垂直向下发射声波并接收水底回波,根据声速和回波时间来确定被测点的水深,通过测得水深获得水下地形、地貌的基本情况,通常情况下水下地形测量采用与陆上统一基准面和坐标系。
1.4 RTK结合测深仪工作机制RTK结合测深仪作业模式就是既采用RTK实时采集的坐标、高程又采用测深仪测得的水深,即H=H0-(h+hi),式中,H为河底高程,H0为水面高程,h 为换能器吃水深,hi为换能器底部到河底的水深。
水库水下地形测量中GPS结合测深仪应用

水库水下地形测量中GPS结合测深仪应用摘要:随着GPS技术的不断发展,RTK技术的出现和计算机技术的飞速发展,平面定位技术实现了高精度、自动化、数字化和实时化。
随着探测技术的数字化和自动化,为水下地形测量数字化、自动化和水利测量提供了基础,为测绘提供了先进的手段。
文章介绍GPS结合测深仪在水下地形测量中的实际应用、测深设备的基本工作原理,以及在测量过程中会遇到的问题及处理方法。
关键词:水下地形测量;GPS;测深仪0引言水下地形测量在许多工程建设项目上有着重要的作用,它可以为桥梁、码头、水库、港口等工程建设项目提供必要的基础数据,是现代水利工程中的一项重要工程技术。
由于传统水下测量模式存在着诸多弊端,譬如测量难度大、数据不精确、不能反映真实水下地形等问题。
现代的“GPS+数据处理软件+测深仪”的测量模式逐步取代传统的测量模式。
1控制测量水下地形测量应与地面上的国家控制点或高级控制点构成统一整体,只在需求的情况下单独建立水下地形测量的高程和平面控制。
2水下地形测量2.1数字测深仪的工作原理数字测深仪是利用声波的传导特性,实现水下地形测量的仪器。
数字测深仪的原理是通过振荡器发出超声波后遇到障碍物,再通过接收器接收反射回的声波,通过时间差t,求出距离D=Ct/2,C为超声波波速。
2.2水下地形测量系统组成水下地形测量利用GPSRTK和数字测深仪、计算机联合使用作业。
作业人员应在测量前将测区的范围图导入计算机,按规范要求在测量前设计好测线,测量时应按照测线进行测量活动。
利用RTK的定位定向功能指导船只航行。
利用计算机的测深软件实时观测船只的航向、航速、船只的平面坐标、水深及RTK的解状态。
声波在水中传播速度受到水温、水深、水的盐度等因素的影响,因此要进行相关参数的修改,同时可以利用声抛仪辅助修改相关参数,用以获得准确的测深数据。
2.3水下地形测量工作原理用测深仪专用连接杆连接测深仪与RTK,再将连接好的连接杆安装在船只上,将测深仪没入水下,连接杆要始终保持垂直于水面,并保持连接杆与船只的相对位置不变,RTK可以实时的获得平面坐标与高程坐标,由RTK所获得的高程减去RTK距水面的高度。
GPS-RTK结合测深仪在水下地形测量中的应用探讨

GPS-RTK结合测深仪在水下地形测量中的应用探讨摘要:GPS -RTK技术的发展及其在测绘中的应用,给测绘工作带来了前所未有的大变革。
不仅提高了工作效率,也大大提高了成果的精度。
本文阐述GPS -RTK与数字测深仪组成的水下地形测量系统的工作原理,探讨分析了GPS -RTK 配合测深仪对水下地形测量的精度控制中具有的问题及应对措施。
关键词:GPS-RTK; 测深仪;水下地形测量;引言测绘工作是经济建设、社会发展的基础事业,随着社会的飞速发展,测绘工作的作用越来越重要,同时测量方法和测量仪器也发生了重大的变革。
以往的传统的方法是采用全站仪结合测深仪进行测量,测量工作受气象等条件的影响较大,精度难以保证。
常规测量,工作难度大,外业测量人员也很艰苦,且成图时间长。
GPS技术的兴起和发展,打破了这一传统方法。
近些年来,随着GPS测量技术的不断发展,其已经应用于进行陆地和水下地形测量。
利用GPS -RTK 配合数字测深仪进行水下地形测量大大减轻了野外作业的劳动强度,提高了内外业工作地效率和精度。
本文对GPS -RTK配合测深仪在水下地形测量上的应用进行了探讨。
一、GPS—RTK和测深仪工作原理1、RTK的基本原理RTK是实时动态载波相位差分。
RTK系统由一个基准站。
若干个流动站及通讯系统组成。
其设备是在两台静态型测量仪器问加上一套无线电数据通讯系统(数据),将相对独立的GPS信号接收系统连成一个有机整体。
RTK测量时,基准站将观测值和测站坐标信息通过数据链发送给流动站。
流动站通过数据链接收来自基准站的数据,同时采集GPS观测数据。
2、测深仪测量原理测深仪是利用声波反射的信息测量水深的仪器。
回声测深仪的工作原理是根据超声波能在均匀介质中匀速直线传播,遇不同介质面产生反射的原理设计而成的。
测深时将超声波换能器放置于水面下一定位置,换能器到水底的深度可以根据超声波在水中的传播速度和超声波信号发射出去到接收回来的时间间隔计算出来。
GPS-RTK联合测深仪在水下地形测量中的应用
GPS-RTK联合测深仪在水下地形测量中的应用摘要:水下地形测量具有测量隐蔽、精度控制难度大等特点,因此,对其测量技术的要求较为严格。
本文就介绍了GPS-RTK联合测深仪在水下地形测量中的应用,阐述了利用GPS-RTK与测深技术测定水下地形的基本原理和水下地形测量的基本实施步骤,并通过结合工程实例,对项目实施、数据比较等做了深入研究,为类似工作的应用进行提供参考。
关键词:GPS-RTK;测深仪;应用;原理随着科学技术的发展,GPS-RTK技术已经得到了广泛的应用,虽然这种技术具有测量速度快,精度高等特点,但是这种无验潮模式下的测量方法还无相关规范和技术标准,所以在与测探仪联合应用中,就要注意其工作的实际情况,从而探究出其是否能满足相关规范要求。
本文通过无验潮和传统验潮两种模式下水下地形测量的原理和两种模式下水深测量的数据进行分析,得出该技术在水下地形测量两种测量模式中均能满足相关规范要求。
1 水下地形测量的原理水下地形测量包括两部分:定位和水深测量。
就目前的水下地形测量的主流技术而言,定位采用的是RTK(Real-time kinematic)实时动态差分法,而水深测量采用的是回声测深仪的方法。
这样就可以确定水底点的高程:Gi=H-(D+ΔD) (1)式中:Gi为水底点高程;H为水面高程;D为测量水深;ΔD为换能器的静吃水。
在观测条件比较好的情况下,考虑RTK具备比较高的高程确定精度,同时严格考虑船姿的影响,无验潮模式下的水底点高程可通过下式确定:Gi=H-D-h-Δa (2)式中:Gi为水底点高程;H为GPS相位中心的高程(通过RTK直接确定);D 为测量水深;h为GPS接收机天线相位中心距换能器面的垂距;Δa为姿态引起的深度改正。
2GPS-RTK联合测深仪水下地形测量的基本作业步骤水下地形测量作业系统主要由GPS接收机、数字化测深仪、数据通信链和便携式计算机及相关软件等组成。
测量作业流程大体分三步来进行,即测前的准备、外业的数据采集和数据的后处理。
浅谈GPS RTK配合测深仪在水下地形测量中的应用

4 .作业依据: 10 10 00 .1 2 ①《" 0 : 0 : 0 地形图图式} B 99 19 ; . 10 1 5 2 G  ̄72— 95 ②《 工程测量规 范} B 0 2 - 0 7 ③《 : 01 0 01 0 0 G 5 0 6 20 ; 1 0 : 0 2 0 地形测量 规 5 1 : 范 ( 外数 字 成 图 ) 行 》 ④ 《 球 定 位 系统 ( P ) 4 规范 } B r 野 试 ; 全 G S ̄ 量 G/
1 3 4— 0 。 8 1 测量两部分 ,一般测量采用全 站仪定位 , 测量工作受气象 的影响较大 , 外业测量工作难度大 。采用南 方灵锐 ¥ 6 8 双频 G S P 接收机配合数字测深仪 ,困扰水上测量工作的问 题便得到解决。
2 GP K原 理 . S RT
21R K的基本原理 . T R KR aTm i m t ) T (el i e n a c K e i 是实时动态载波相位差分 。 其设备是在两 台静态 型测量仪 器问加上一套无线 电数据通 讯系统( 数据链 )将相 对 , 独立的 G S信号接收系统连成一个有机整体 。 P 22R K系统组成和方法 . T R K系统 由一个基准站。 T 若干个流动站及通讯 系统组成 。 基准站包括 G S 收机 , P 天线 , 线电通讯发射设备 , G S P接 GS 无 供 P 接收机和无线 电通讯设备使用 的电源及 基准站控制 器等部分 。一个 流 动站包括 G S天线 , P P G S接收机 , 电源 , 线电通讯接收设备及流动站 无 显示控制器 。 在 R K作业模 式下把需 要的数据输入控 制手簿 ,如基 准站 的坐 T 标、 高程 、 坐标系转换参数 、 准面拟合参数等 ; 水 流动站接收机在若干个 待测点上设置。基准站与流动站保持同时跟踪至少 4颗以上的卫 星, 基 准站不断地对可见卫星进行观测 ,将接 收到 的卫星信号通过 电台发送 给流动站接收机 ,流动站接收机将采集 到的 G S观测数据和基准站发 P 送来 的信号传输到控制手簿 , 组成差分观测值 , 进行实时差分及平差处 理, 实时得出本站的坐标和高程。哒 比 G S f P 静态 、 快速静态定位需要事 后处理来说 , 其定位效率大大提高。 以 R K技术一出现 , 所 T 其在测量工 作 中的应用立刻受 到作业人员的重视和青睐 。
GPS结合测深仪在水库水下地形测量中的应用

GPS结合测深仪在水库水下地形测量中的应用摘要:本文以象山县大塘港水库为例,主要对GPS-RTK测量技术及水深测量系统、GPS结合测深仪的测量原理、测量仪器的配置、GPS结合测深仪实施水下地形测量、GPS结合测深仪测量优点以及测量注意事项进行了研究和分析。
关键词:GPS;测深仪;水库;水下地形测量引言在城市建设中,水下地形测量工作是基础,它能够提高城市的防治、航运能力等。
另外,水下地形测量在水库工程中也是比较基础的一项工作。
水下地形测量就是利用测量仪器将水地点的三维坐标过程确定下来,传统水下地形测量主要是用经纬仪、水准仪等一些仪器来进行,每次测深操作测深开关的操作都需要操作人员亲自来做,同时向各测站发送施测信号主要是通过对讲机来进行。
各测站受到信号同时将其记录下来,经过计算,描绘成水下地形图。
传统的这种测量方式需要很多人员的支持和配合,人员较密集,工序较繁琐,工作人员工作强度大、效率低,并且难以保证精度。
随着电子技术的快速发展,GPS结合测深仪成为了水下地形测量的重要工具。
本文以象山县大塘港水库为例,主要对水库水下地形测量进行分析,为满足工程可行性研究阶段的需要,对库区进行1∶1 000水下地形图测量。
1.GPS-RTK测量技术及水深测量系统1.1 GPS-RTK测量技术GPS-RTK测量技术是一个实时动态定位技术,此技术是建立在载波相位观测基础上,对于流动站在既定坐标系中实时的三维坐标数据,此技术能够给予提供,在一定范围内,精度可达到厘米级。
GPS-RTK测量系统主要包括基准站接收机、电台、移动站接收机。
如果在CORS基站网络服务范围内有测区存在,那么测量工作就可以运用网络RTK技术来开展,从而就可以将基准站接收机部分省去。
1.2测深系统测深系统主要的组成部分包括工控电脑、水深采集软件、测深仪。
测深系统为了能够使换能器产生的蜂鸣噪音得以降低,其具有变频功能,并且还能够使回声强度增强,深测仪的测深性能得以提高。
GPS—RTK技术在水下地形测量中的应用观察
GPS—RTK技术在水下地形测量中的应用观察利用传统落后的测量方法来测量水下地形会使得水深测量数据与水下地形测量点的平面定位有所出入,这不仅会增大野外测量人员的测量难度,延长工作时间,同时也使得水下地形点的精度大大降低。
现阶段,随着我国科学技术的不断进步,GPS技术和RTK技术的逐渐发展并完善大大的提升了我国水下地形测量工作的质量。
在测量水下地形时应用GPS-RTK技术可以有效地实现测量数据传输的全自动化,降低野外测量人员的工作难度,减少在测量时出现的人为故障,进而有效地提高水下地形测量的工作效率。
标签:GPS-RTK技术;水下地形测量;应用观察引言现阶段,随着我国社会经济的不断发展,我国的科学技术也在不断地提高,水下地形的测量技术也在不断地改善并提高。
GPS-RTK技术是当前我国在测量水下地形时较常使用的技术,它是由自动化技术、测绘技术、数字化技术以及计算机技术等众多技术综合产生的结果,GPS-RTK技术在进行水下地形测量时能够实时的测量水下的高程、地形并及时地将测量结果的传输至地面控制中心。
1 GPS-RTK技术的基本概述1.1 GPS-RTK技术在水下地形测量中的具体实施方法在利用GPS-RTK技术进行测量水下地形时测量的重点内容是要掌握被测水域水下地形的高程及其平面位置,在利用GPS-RTK技术进行测量水下地形时测量水下地形的高程应与测量平面位置相一致、同步[1]。
在测量水下地形时应用GPS-RTK技术可以有效地实现三维定位与探测步骤协同进行,进而利用流动站和水位探测仪来进行定位和水深工作。
1.2 GPS-RTK技术测量的基本组成及相关测量原理在测量水下地形时应用GPS-RTK技术主要是依靠流动测量站及固定GPS基准站实现的。
计算机、探测仪、数据通讯链及GPS接收机等仪器是GPS-RTK技术在测量水下地形中常用的仪器。
在这之中GPS接收机主要是用于接收卫星信号,探测仪则主要是获取被测水域的水深值,数据通讯链的功能主要是将基准站接收的信号实时的传送至流动站,计算机的功能则主要是分析流动站接收地信号并及时的反馈GPS的定位结果。
GPS RTK无验潮测深在水下地形测量中的应用

GPS RTK无验潮测深在水下地形测量中的应用摘要:GPS RTK无验潮测深在水下地形测量中的应用,大大减少了测量人员的劳动强度,自动化程度高,省工省时,精度高,全天候,提高了工作效率,使工程变得更经济。
本文首先阐述了GPS RTK技术水下地形测量的原理,其次,分析了RTK无验潮水深测量时的注意事项。
同时,以一应用实例为例,对其进行深入的探讨,具有一定的参考价值。
关键词:GPS RTK;无验潮测深;水下地形测量1.前言无验潮水下地形测量是利用GPS RTK技术结合数字测深仪测量水深的一种方法。
该方法可按距离或时间间隔,自动采集RTK确定的三维位置及水深数据,只要将GPS天线高量至水面,对测深仪进行吃水深度改正,便可高精度、实时、高效地测定水下地形点的三维坐标。
不用进行验潮改正大大减少了测量人员的劳动强度,自动化程度高,省工省时,精度高,全天候,提高了工作效率,使工程变得更经济。
2.GPS RTK技术水下地形测量的原理GPS RTK(Real Time Rinematic)实时动态定位技术是一项以载波相位观测为基础的实时差分GPS测量技术,它是利用2台或2台以上的GPS接收机同时接收卫星信号,其中1台安置在一个固定的地方以作为基准站,其它作为流动站,这样基准站的电台连续发射差分数据,流动站上连续接收数据,流动站上就可实时计算出其准确位置,通过计算机中软件获取测深仪的数据,并自动滤波,形成水下地形原始数据,这种方法测量的平面位置精度能够达到厘米级,高程精度一般能够达到小于10 cm,对于测量水底地貌完全足够。
3.RTK无验潮水深测量时的注意事项RTK无验潮测深技术虽已逐步被使用,但是要想得到精确的水深测量图成果,需要考虑诸多因素的影响,只有有效控制每一项影响精度的因素,最终的成果质量才能得到保障。
在使用RTK进行无验潮水深测量时有以下几点注意事项:(1)内河进行无验潮水深测量时应沿河道在已知控制网点上进行比测。
GPS―RTK配合测深仪进行水下测量原理及步骤共5页
GPS―RTK配合测深仪进行水下测量原理及步骤随着水利水电工程的大量建设,众多的大型水库、特大型河流、海洋的测量任务越来越多。
传统的河流水下地形测量是在岸边通视条件良好的图根控制点上架设全站仪,用全站仪观测船体的方位,通过计算船体的平面位置,再利用静水水面高程与船体的水深来求得测量点的水下高程。
这种测量方法显然是把平面位置测量和水深测量是分开进行的,测量精度、效率都不能得到很好的保障。
1测深仪种类测深仪就是测量水深的仪器或装置。
有声学、激光、压力、电磁式测深仪,以及纲缆等机械测深装置,较常用的是回声测深仪,利用声波反射的信息测量水深的仪器。
其中有一类超声波测深仪,所使用的声波频率在2万赫以上回声测深仪的问世,使海深测量技术发生了根本性的变革。
目前已有升沉补偿测深仪、拖曳式测深仪、多波束测深仪等多种不同类型的测深仪器,这些都是由于海洋勘探的需要而发展起来的设备。
人们根据工作深度的不同,设计制造了大小不同的测深仪器。
小型测深仪的工作频率在100千赫兹左右,换能器尺寸较小,可在小艇上使用,用于测量几十米到几百米水深的海洋深度。
而大型测深仪的工作频率为数千赫兹左右,换能器尺寸较大,可测量深达10000米的世界海洋最深处的水深。
此外,还有一种双频测深仪。
所谓双频测深仪就是指能用高、低两种不同频率工作的测深仪器。
这种测深仪适用于测量沉积有稀泥的航道,它能用较低的工作频率探测较硬的真海底,或用较高的工作频率探测稀泥表面。
现在,回声测深仪的显示、记录方式也有多种不同类型。
近代测深仪除用放电或热敏纸记录器记录外,还有数字显示及存储,甚至可以和计算机结合起来而自动绘制海底地形图等多种不同方式。
2工作原理2.1回声探测设备是最早的一类水下声学仪器,这种设备得到了广泛地应用所有这样的设备都有一个共同的特点:它们都利用一组发射换能器在水下发射声波,使声波沿海水介质传播,直到碰到目标后再被反射回来,反射回来的声波被接收换能器接收。
GPS—RTK结合测深仪组合系统在水下地形测量中的应用
GPS—RTK结合测深仪组合系统在水下地形测量中的应用从我国乃至世界用于水下地形测量的技术上看,GPS和测深仪的结合运用较多。
尤其是GPS-RTK技术的出现具有实时化、速度快、精度高的特点,给GPS 和测深仪的结合提供了良好的契机。
GPS与测深仪再配合相应的数据处理软件,可以快速、实时、准确的测出水下点的坐标,这一技术出现后立刻获得了测量人员的青睐,此系统在水下地形的测量中得到了广泛的应用。
标签:GPS和测深仪水下地形测量组合系统港口城市的发展需要全面考虑水下地形,并根据实际情况规划航道;另外水下地形测量是许多水利工程的基础性工作。
因此,注重水下地形的测量工作极为重要。
水下地形测量的传统工具是测深杆、测深锤及经纬仪、全站仪的组合。
这一方式具有一定的有效性,但同时这一工作受天气、人力制约且受距离限制,总的来说过程繁琐,而且即使获得了相应数据还需要反复的论证和实验。
随着GPS 的广泛应用,尤其是RTK 技术的出现,结合利用测区附近的控制点,定位精度可以达到厘米级。
这一技术系统很大程度上解放了人力,降低了劳动强度,提高了工作质量。
因此,该技术一经运用就获得了极大的关注度。
以下内容将对该组合系统进行详细的论述。
1GPS—RTK和测深仪组合系统的构造和原理分析1.1GPS—RTK和测深仪组合系统的基本构造GPS—RTK和测深仪组合系统作为当前水下地形测量使用最广泛的技术,综合来看由两部分组成:第一部分是一个确定不会发生变化的基准站;另一部分则是一个根据实际需要不断变化流动的流动站。
第一部分中主要集成了GPS接收机、数据链等设备,而流动站的设备相对较多,主要包括GPS 接收机、数据链、测深仪、计算机硬件设备及软件计算系统。
简单说就是指将两者技术通过一定的方式有效的集成,使其发挥协作作用获得关于水下地形的数据,然后使用计算机设置的特定系统对数据进行快速分析,进而得出水下地形的三维坐标,在这一工作中计算机系统发挥了最后的作用,也是最主要的作用,它很大程度了解放了人力。
测深仪结合GPS技术在水利测量中的应用

测深仪结合GPS技术在水利测量中的应用摘要:21世纪,水下是丰富资源的宝库,随之而来的是水下资源开发时代。
水下测量技术的创新和发展也成为衡量国际竞争力的条件之一。
RTK显然是最流行的测量技术。
它取代了通过铺设控制网和使用经纬仪或平面仪器正向交会确定测深点的定位方法,成为人们日常生活中使用的一种高速、高效、高精度的测量技术。
本文利用全球定位系统和数字测深的原理获取水深数据,从而获得水下点的测量数据。
对两类数据进行误差分析,提供相应的误差修正,对结果进行分析,并提出GPS与数字测距仪组合系统在工程应用中的不足。
关键词:测深仪结合;GPS技术;水利测量;应用1GPS测量原理与数字测深技术1.1GPS定位原理及特点GPS的基本定位原理是通过测距交点确定测点的位置。
GPS接收器从卫星接收的载波信号与接收器的本地振荡器参考信号之间的相位差是载波相位的测量原理。
全球定位系统的基本测距方法使用测距码进行伪测距。
然而,对于高精度应用,伪测距中测距码的长度相对较大,无法满足其高精度要求。
然而,大地测量接收器中使用的载波相位测量精度可以达到1mm~2mm,有些甚至可以达到更高的精度。
1.2GPS系统组件GPS系统包括三个部分:GPS卫星星座(空间部分)、地面监控系统(地面控制部分)和GPS信号接收器(用户设备部分)。
这颗卫星位于距离地球表面20000多公里的高度。
有21颗工作卫星和3颗备用卫星分散用于应急或替换工作。
这24颗卫星构成了全球定位系统卫星星座。
其功能是接收地面控制操作指令,完成数据分析处理,调整卫星姿态,并提供时间测量、速度测量、定位等服务。
1.3测深仪的基本工作原理和分类1.3.1测深仪的基本原理首先,假设船体处于最佳理想工作状态(船体不会摆动,在测量立即完成之前不会有位移等);其次,测深器安装在船体上,并在水下发出声波。
声波在水中以一定的速度V传播,当遇到障碍物或反射器时,声波被折射或反射。
然后,它们被换能器接收器接受,并且计算它们的时间t。
GPS-RTK配合数字测深仪在水下地形测量中的应用
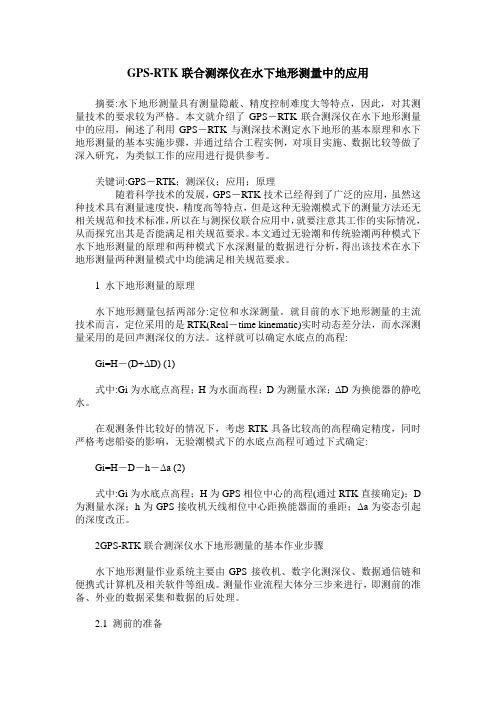
面 高 程 :s H
、
\.
/
地 形 点 高 程
< 换 能 器 探 头 》
水深 D
—
ห้องสมุดไป่ตู้
始化 成 功 出现 点 固定 解 的值 。 然后 将 参 考椭 球 系 设 置 为 15 4北 京 坐 标 系 , 完 成 投 影 参 数 设 置 ( 央 子 午 线 9 中 1 。 7 ,高斯 投 影 3 带 ) 1 。 ,并 输入 七参 数 。 设置 完 成 后 , 用
3 实例 验证 条件 限制 , 而且工作 效率 很低 。 31 工程概 况 . 随 着 电子 声纳 、 S 全球 定 位 系统 ) 技术 的发展 , GP ( 等 埠 港 新港 液 货运 输 专 用码 头 位 于 淮河 南 岸 蚌 埠 市 禹 GP — T S R K与 数字测 深仪相 结合 的三维 数据 采集 、 传输 、 处 距 蚌 一期 ) 下 理 的 自动化 测 量数 据 处理 系统 克服 了上 述 方法 测 量 中 的 会 区宋 家滩 , 蚌埠 闸下 游 约 4公里 , 埠 新港 ( 蚌 0万 吨 , 设 建 种 种条 件 限制 ,且 大幅度 提 高作业 效 率和减 少 劳动 强度 , 游。 埠港液 货运 输专 用码头 设计吞 吐量 为 2 1个 3 0吨级兼顾 5 0吨级液 货泊 位 , 0 0 采用 浮码 头 结构 型 同时精 度 也得 到 了有利 的保 证与 提高 , 实现 了水 下测 量 的 式。为满足 港 口设计要 求 , 院承接 了此次水下 勘测 任务 。 我 自动化 、 字化和 系统化 。 数 32 控制 资料 . 本 文简 单 阐述 GP — T S R K技术 的工作 原理 及 方 法 , 并 本次 测量 利 用 已有 控 制 点 为淮 河 干流 蚌 埠 段 控 制 点 通 过 实例验 证 新技 术 的优 越 性 , 为深入 类似 水下 地形 测量 B G1 B G B 、 B 2和 F 4 8 2,淮北 大 堤蚌 郊 段竣 工 测量 图根控 提 供参 考。 制点 B t l 。平 面坐标 系采 用 1 5 Jg 2 4年北 京坐标 系统 。高 9 2 R K技 术及水 深测 量原 理 T 程基 准采用 1 8 9 5国家高 程基准 , 淮河 干流 蚌埠段 七 参数 。 R K系 统是 由一 个基 准站 、 干个 GP T 若 S接 收机 、 无线 电数据 链 电台及发 射 天线 、 直流 电源 等组 成。 R K的工作 T 原 理是 将 一 台接 收机设 置 为基 准 站 , 一 台或几 台接 收机 另 设置 为流 动 站 , 准 站 与流 动 站 同时 接 收 同一 时段 、 基 同一
GPS_RTK技术在港口水下工程的应用

科技创新随着现代科技的快速发展,GPS 定位技术系统在我国得到了广泛的应用和完善,GPS技术以其全天候、高精度、自动化、高效益等显著特点,深得各界人士的认可,越来越多的应用到了测绘领域,发挥了巨大的作用。
该系统是以卫星为基础的无线电导航定位系统,具有全能性(陆地、海洋、航空和航天)、全球性、全天候、连续性和实时性的导航、定位和定时的功能,能为各类用户提供精密的三维坐标测量工具系统,主要包括三大部分:地面控制部分、空间部分、用户设备部分,其各部分既是具有独立的功能和作用,又是一个配合在一起的有机整体系统。
GPS卫星系统的基本参数是:卫星颗数为21+3,卫星轨道面个数为6,卫星高度为20200km,轨道倾角为55°,卫星运行周期为11小时58分(恒星时12小时),载波频率为1575.42MHz和1227.60MHz。
目前GPS测量方法主要分为:事后差分处理和实时差分处理。
事后差分处理包括静态和快速静态,其精度根据不同的测量等级来确定测量方法,其精度可以达到毫米级,广泛的应用于建立各等级的测量控制网及各类建筑的测设和监测。
实时差分处理包括位置差分和伪距差分、载波相位差分。
其中位置差分和伪距差分能满足米级定位精度,已广泛的应用于导航等。
载波相位差分技术又称RTK技术,可使实时三维定位精度达到厘米级,已广泛应用于港口与航道工程及其他工程的施工放样及定位系统。
RTK测量的基本原理及作业方法RTK是一种高精度实时相位差分动态定位技术,由基准台、移动台及RTK差分数据链组成。
移动台无需在已知点上做初始化,而直接在动态环境下确定整周模糊度,实时接收GPS定位信息,并按基准台发送的RTK差分改正数进行修正,获得厘米级精度的三维坐标,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了极高的外业作业效率。
目前国内RTK产品主要配置是基准站加移动站1+1、基准站加多个移动站1+X等形式运用在工程中,本文以中海达系列RTK产品HD9900E型号为例,简单讲述其工作原理:在RTK作业模式下,基准站除了采集卫星数据外,还要通过数据链将其观测值和站点坐标信息通过调制解调器进行编码和调试,经电台数据链发射出去传送给流动站。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 3) 流动站在数据采集过程中,按照卫星状况 及数据链的通讯质量,出现异常及时调整和修正。 根据实时模拟信号显示状况,当遇到水草部分,测 出水深为伪值时,这时进行人工测定水深值,并及 时在水深文件里进行修正,确保水深数据采集的质 量。 3. 3. 3 数据处理
1 GPS-RTK 及测深仪工作的基本原理简介
1. 1 GPS-RTK 技术
常规的 GPS 测量如静态 GPS、快速静态 GPS 和 动态 GPS 测量都是先测量事后再进行解算才能得 到所测点位的坐标值,而 RTK( Real Time Kinematic) 载波相位实时差分技术能够实时地提供测站点 在指定坐标系中的三维坐标成果,定位精度可达到 厘米级。GPS-RTK 测量是全球卫星导航定位技术 与数据通信技术相结合的一种技术,主要由基准站 和流动站两部分构成,基准站通过接受数据链将其 观测值和测站坐标信息一起传送给流动站。流动 站通过数 据 链 接 收 来 自 基 准 站 的 数 据,同 时 采 集 GPS 观测数据,并在系统内组成差分观测值进行实 时处理 ( 李征航等,2005; 田雪冬等,2009; 周忠 谟 等,1997) 。随着 GPS 技术的不断发展,利用多基站 网络 RTK 技术建立的连续运行卫星定位服务综合 系统( Continuous Operational Reference System) 简称 CORS 系统在全国多个省市均已建立应用,该系统 由基准站网、数据处理中心、数据传输系统、定位导
图上 1. 0
水深范围 /m
H≤20
深度误差限值 m
± 0. 2
参数的设置: 将该测区的坐标系统转换参数输 入测深仪及 GPS 接收机中。
仪器架设: 如图 2 所示,将测量船停泊在平静 的水域,在距离测量船船首 1 /3 ~ 1 /2 船长处架设 测 深 仪 换 能 器 探 头,固 定 好 之 后 在 换 能 器 探 头 中 心的同一轴线上架设中海达 V30 接收天线。
参考文献
李征航,黄劲松. 2005. GPS 测量与数据处理[M]. 武汉: 武汉大学出 版社.
田雪冬,郭标明,郭麒麟,等. 2009. GNSS 定位技术在水利水电工程 中的应用[M]. 武汉: 长江出版社.
周忠谟,易杰军,周琪. 1997. GPS 卫星测量原理与应用[M]. 2 版. 北 京: 测绘出版社.
( 1) 水下数据分平面位置数据和水深数据,两 类数据既可以分开采集存贮,也可同时采集存贮。 不管哪种方式都必须保证两者的同步性,即要实现 同时同地点采集数据,为了达到这个目的,须使得 接收机的天线与测深仪换能器在同一竖直轴线上, 而且须将 RTK 接收机与测深仪设置等时间间隔进 行采样并自动存贮,从而准确有效地实现了数据采 集自动化。
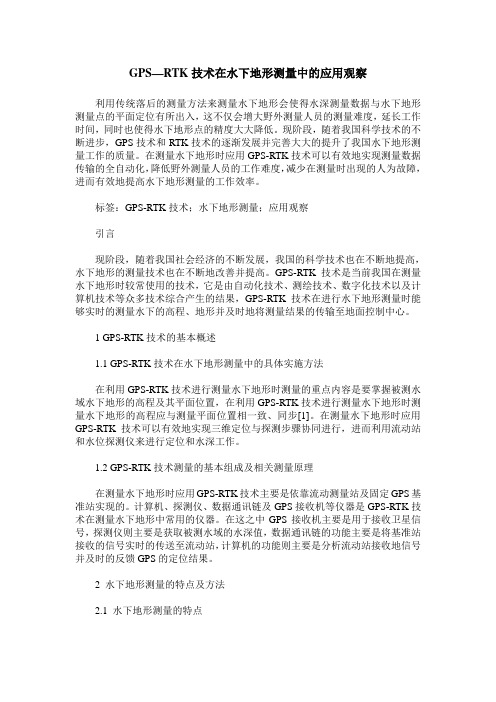
图 1 测深仪测量原理示意图
作者简介: 包荣萍( 1967—) ,女,高级工程师,主要从事工程测量技术研 究工作。E-mail: ha - brp@ 163. com
150
东 华 理 工 大 学 学 报( 自然科学版)
2016 年
2 测量系统的组成
软件 主 要 采 用 南 方《CASS7. 0 》、百 图《断 面 CAD2004》以及中海达《测深软件》。
如图 1 所示,测深仪分单波束和多波束两类, 主要功能设备是能够发射声波和接受反射回声波 的换能器以及进行回声处理系统( 计算机、系统控 制盘等) 组成。假设声波在水中传播的速度为 V, 在换能器探头加载脉冲声波信号,声波经探头发射 到水底,并由水底反射到探头被接收,测得声波信 号往返历程时间为 t,则水底至换能器的距离即为 h = Vt /2。由于水下情况复杂性,要得到正确的水底 回波信号,必须结合采用水底门跟踪技术( 时间门 跟踪技术) 、脉宽选择、信号门槛、自动增益控制、时 间增益控制等技术。
航数据播发系统、用户应用系统五个部分组成,用 户只需在流动站用 GPS 接受机同时接受卫星和基 站发来的无 线 电 信 号,而 无 需 再 架 设 基 准 站 测 量, 即可实时测出流动站的三维坐标值。使用更加方 便灵活,不仅能充分保证成果精度,而且大大降低 劳动强度,提高工作效率。 1. 2 测深仪测量原理
仪器主要采用中海达 V30 GPS 接收机及中海 达 HD-310 测深仪。
3 技术路线
中海达 V30 GPS 接收机精度: 静态、快速静态 精度: 平面达 ± ( 2. 5 + 1 × 10 - 6D) mm,高程: ± ( 5 + 1 × 10 - 6D) mm; RTK 定位精度: 平面: ± ( 10 + 1 × 10 - 6D) mm,高程: ± ( 20 + 1 × 10 - 6D) mm。
在江苏沿海开发上升为国家战略和长三角一 体化发展 的 宏 观 背 景 下,淮 安“借 港 出 海”、发 展 “海河经济”的战略目标正在全面快速推进,为此我 公司曾承接了对某航道全长约一百多公里的测量 任务。根据工程可行性研究设计的要求,需对该航 道进行 1 ∶ 2000 地形图、横断面以及全线航道深槽 的纵断面测量。
增刊
包荣萍等: GPS-RTK 配合测深仪在水下测量中的应用
151
行进方向,需事先在测深仪中设计测深线,测深线 就是测量水下地形的方向线,测深线的间距以及测 深线方向上测深点的密度须符合相应比例尺地形 图的要求,根据设计单位提供的需测量的断面间距 和水下地形测量范围布设测深线 ( 本工程按每 30 m 布设一条测深线) ,形成 . dxf 格式文件导入测深 仪中。 3. 3. 2 数据采集
将观测得到的 WGS - 84 坐标导入江苏省测绘 工程院坐标转换软件和似大地水准面应用软件进 行解算得到 1954 年北京坐标系( 中央子午线 120°) 坐标及 1985 国家高程基准高程。
表 3 测深定位点点位中误差限值和深度误差限值
测图比例尺 ≤1∶ 5000
定位点点位中 误差限值 / mm
天线的丈量: 采用无验潮方式,准确丈量 GPS 天线至测深仪换能器的垂直距离 h0 ,将 RTK 拟合 高程 H0 直接换算至换能器位置,水底高程则为换 能器高程减去水深值,即 H = H0 - h0 - h。
3. 2 控制点的检测
对本测区的 20 对二级 GPS( RTK) 点的边长均 采用徕卡 TC402 全站仪进行了检测。最弱边 HH38 - HH37 的 相 对 误 差 1 /12350,满 足 规 范 小 于 1 / 7000 的检测要求。
摘 要: 通过对 GPS-RTK 技术和测深仪测深原理的阐述,结合某工程水下地形测量的关键技术质量控制点的具体介绍,在 水下测量中将 GPS-RTK 技术和测深仪的测量技术两者融合在一起加以应用,从数据的采集到地形图生成实现了全程自动 化,不仅能充分保证成果精度,而且大大降低劳动强度,提高工作效率。 关键词: GPS-RTK 技术; 测深线; 无验潮方式; 数据采集
( 1) GPS-RTK 平面控制点测量主要技术要求 符合表 1 规定。
表 1 平面控制点测量主要技术要求
等级 点位中误差( cm) 边长相对中误差
起算点等级
测回数
15 ° 以上的卫星个数
PDOP 值
பைடு நூலகம்
二级
≤ ±5
≤1 /10000
一级及以上
≥3
≥5
≤6
( 2) GPS-RTK 高程控制点测量主要技术要求 符合表 2 规定。
每天外业采 集 结 束 后,及 时 整 理 数 据,将 碎 部 点的三维坐标文件导入地形图软件进行展点和建 模,剔除异常点; 然后生成水下地形图,自动绘制等 高线,根据断面线位置摘录断面数据或根据所用的 软件具备的功能可自动生成纵、横断面图。 3. 3. 4 数据检核与分析
根据 JTJ203—2012《水运工程测量规范》规定, 测深检查线与主测深线相交处,图上 1 mm 范围内 水深点的深度比对互差应不大于 0. 4 m。为了说明 测深数据的准确可靠性,在垂直于主测深线方向布 置两条检查线,同精度检查了 266 点。发现有 4 点 比对差超限系为粗差,粗差率为 1. 5% ,其余均在 0. 4 m 以内,总体上符合误差正态分布原理,计算 出的测深中误差为 0. 09 m,说明测量成果质量良
第 39 卷 增刊 2016 年 6 月
东 华 理 工 大 学 学 报( 自然科学版)
JOURNAL OF EAST CHINA UNIVERSITY OF TECHNOLOGY
Vol. 39 Jun. 2016
GPS-RTK 配合测深仪在水下测量中的应用
包荣萍, 尚庆明, 丁旭东, 朱新珍
( 淮安市水利勘测设计研究院有限公司,江苏 淮安 223005)
( 2) 利用无验潮技术进行水深测量,省去了验 潮模式下的检验潮位和测量吃水深度工作,在减少 了精度影响因素的同时使得水下测量更简洁方便。
( 3) 采用 GPS-RTK 实时定位技术与测深仪的 同步测量,整体提高了成果质量。
( 4) 测量数据获取、存贮、地形图和断面图生成 的自动化程度高,免去了人工记录过程中的读、听、 记和算等工作环节,大大减少了测量人员的劳动强 度,提高了工作效率。
( 3) 由于船体的横摇和纵倾需要对换能器的瞬 时高程进行多个变量的实时纠正,为了减少船体姿 态对水深测量的影响,一般只在风浪较小的情况下 进行作业,当波高超过 0. 4m 时应停止作业。
( 4) 在浅水区或水草丛生区域宜采用测深杆或 测深锤测量。
5 结语
( 1) 利用回声测深仪测量水下地形,方法先进, 且操作方便,可实施性强,解决了人工测量因水域 较大或水深较深而无法测点测深的难题。
按四等水准测量精度要求对各对控制点间的 RTK 高程成果 进 行 高 差 检 测,结 果 均 符 合 40 √ L mm 的要求。
3. 3 水下地形测量