6DOF磁悬浮轴承同步数据采集系统设计
基于多处理器的磁悬浮轴承控驱一体系统架构
基于多处理器的磁悬浮轴承控驱一体系统架构程鑫;梁典;汤升庆;张林;卢美千【摘要】磁悬浮轴承因其优异性能是高性能转子系统的理想支承.常规磁悬浮控制系统采用控制器与电流驱动器分别实现位置环和电流环的控制,通过模拟信号传输来实现控制信息的交互,易受干扰且成本较高.提出一种应用于磁悬浮轴承的控驱一体架构,采用双DSP的并行处理方案,实现针对5自由度磁悬浮转子的控制;采用双端口SRAM替换常规DA-AD的方案用于位置环和电流环之间的信息交互;根据双口SRAM的控制时序设计了相应的软件控制流程.试验表明,所提出的多处理器磁悬浮控制系统架构,能有效实现电流环和位置环的双环控制,实现转子系统的稳定悬浮,该架构的有效性得到了证明.【期刊名称】《制造业自动化》【年(卷),期】2018(040)011【总页数】4页(P102-105)【关键词】多处理器;磁悬浮轴承;控驱一体集成架构【作者】程鑫;梁典;汤升庆;张林;卢美千【作者单位】武汉理工大学机电工程学院,武汉430070;湖北省磁悬浮工程技术研究中心,武汉430070;武汉理工大学机电工程学院,武汉430070;湖北工程学院新技术学院,孝感432100;武汉理工大学机电工程学院,武汉430070;武汉理工大学机电工程学院,武汉430070【正文语种】中文【中图分类】TP3910 引言磁悬浮执行器利用电磁力支承转子,具备无机械摩擦、无需润滑、支承特性可控、精度高等特出优点[1,2],存在平面运动和旋转运动两种形式。
前者的主要形式是磁悬浮平面执行器[1,3~6],主要应用于多自由度超精密工作台[7~9];另一类更为广泛的应用是针对旋转支承的磁悬浮轴承,在航空发动机、核能涡轮发电设备、储能飞轮[10]等上作为关键装备。
针对典型的5自由度磁悬浮轴承系统,其多个自由度的支承力可按照需求在特定范围内调节,转子位置也可随力变化在设定范围内变动[11],存在多达10个电流闭环与5个位置闭环。
磁力轴承悬浮性能测试系统的设计
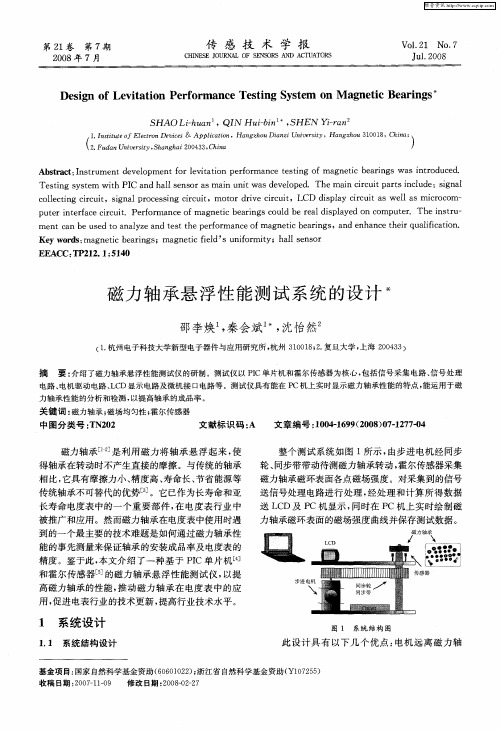
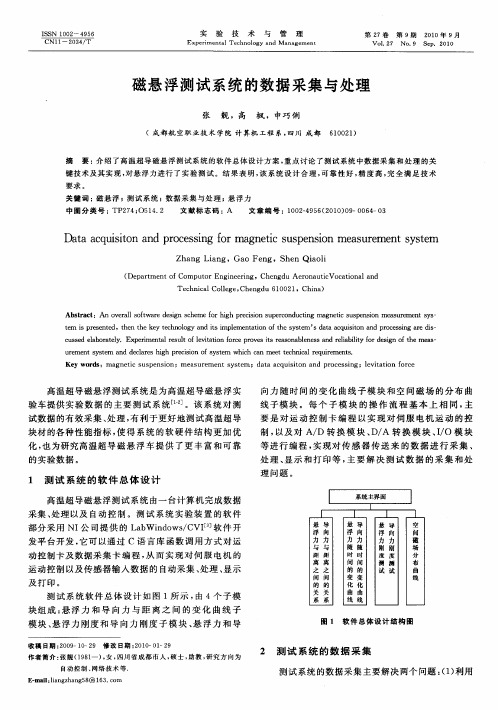
整 个测 试 系统 如 图 1 示 , 所 由步 进 电机 经 同步 轮、 同步带带动待测磁力轴承转动 , 霍尔传感器采集
相比, 它具有摩擦力小、 精度高、 寿命长、 节省能源等 传统轴承不可替代的优势[ 。它已作为长寿命和亚 3 ]
长寿 命 电度表 中的一 个 重 要 部 件 , 电度 表 行业 中 在 被 推 广和 应用 。然 而磁 力轴 承在 电度 表 中使用 时遇 到 的一个最 主 要 的技术 难题 是如 何通 过磁 力轴 承性 能 的事先 测量 来保 证轴 承 的安装 成 品率及 电度 表 的 精度 。鉴 于此 , 本文 介 绍 了一 种基 于 PC单 片机 l I _ 4 ]
c l c i g cr u t i n l r c s i g cr u t o l t ic i 。sg a o e sn i c i,mo o rv ic i,LCD ip a ic i a l a ir c m— e n p t r d i e cr u t d s ly cr u t s we l s m c o o
De in fLe ia in r o m a eTe tn y tm n M a nei a i g sg o v t to Pe f r nc si g S se o g tc Be rn s
S HAOLi u n 。QI Hu一 — a h N i 6 。 HEN i 口 S Y— r
p tri tra ecr ut u e n e f c ic i.Pe f r n eo g e i b a ig o l era ip a e n c m p tr ro ma c fma n tc e rn sc u db e l s ly d o o d u e .Th n tu ei sr — m e tc n b s d t n lz n e tt ep ro m a c fma n t e rn s a de h n et erq ai c to . n a eu e o a ay ea dt s h e f r n eo g ei b a ig , n n a c h i u l ia in c f Ke r s ma n t e rn s y wo d : g ei b a ig ;ma n t il Su io m i c g ei fed’ nf r t c y;h l s n o al e s r
浮动车信息采集系统功能及其设计(doc 6页)
浮动车信息采集系统功能及其设计(doc 6页)0 引言近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384 Kb/s~3 Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。
浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。
本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。
1 浮动车信息采集系统功能浮动车辆通常是指装有定位和无线通讯装置的车辆,其所采集的数据一般包括时间、位置坐标、瞬时速度、行驶方向、运行状态及其他内容。
浮动车交通信息采集是指通过采集浮动车辆运行数据并进行分析处理,将其应用于交通信息服务、交通管理和停车诱导等方面。
浮动车交通信息采集系统主要实现功能如图1所示。
1.1 浮动车交通流数据采集浮动车辆交通流数据采集是指浮动车量通过GPS定位装置等,采集运行数据并通过无线通讯网络将运行数据传回信息控制中心。
为了能够建立有效的、系统性的交通流运行数据,必须确定浮动车数量规模、采集频率和传输频率等参数。
1.2 交通流数据处理交通流数据处理是指采用地图匹配方法将浮动车采集到的车辆数据与数字电子地图数据库中的道路信息进行比较,通过一定的匹配算法确定出车辆可能的位置和最可能的行驶路段。
浮动车地图匹配算法是系统设计关键之一。
1.3 路段交通流状态分析交通流分析是在地图匹配基础上估算路段旅行时间和平均速度,通过路段旅行时间和平均速度估算的结果与预先设定的阈值比较,判断路段畅通、拥挤、堵塞等不同状态,系统设计时主要考虑以下参数:浮动车覆盖率、计算时间间隔、采集时间间隔、测量时间等。
通过仿真实验得出每个时间间隔内横断面浮动车数量计算公式为:Np=P·(Q·ta/60)一般情况下,在高速公路上只要浮动车覆盖率为3%时即可,在城市道路上覆盖率为5%即可达到满意效果。
磁悬浮轴承多自由度转子系统的协同控制建模与仿真研究

磁悬浮轴承多自由度转子系统的协同控制建
模与仿真研究
磁悬浮轴承多自由度转子系统的协同控制建模与仿真研究
随着现代高科技的不断发展,磁悬浮轴承技术得到了广泛应用,
其中多自由度转子系统更是重要应用领域之一,能够有效提高机械设
备的精度和稳定性。
然而,多自由度转子系统由于结构复杂,难度较大,需要采用协同控制的方法进行研究。
首先,对磁悬浮轴承多自由度转子系统进行建模是必要的。
建模
过程中,先要对磁轴承进行建模和分析,获得磁场及其受力情况;再
根据转子的材料和结构特性对其建模,最后将磁轴承和转子系统进行
集成,建立完整的多自由度转子系统模型。
其次,针对该模型进行协同控制研究。
协同控制是指多控制器对
同一被控对象进行控制,实现多种控制目标。
多自由度转子系统中,
需要进行稳定控制和精度控制。
稳定控制主要通过均衡磁轴承和转子
的受力,提高系统整体稳定性;而精度控制则需要通过控制转子在空
间中的位置和方向,实现精准转动。
最后,进行仿真研究是验证该协同控制模型的有效性的重要方法。
仿真过程中,可以利用MATLAB等仿真软件进行模型验证和实验数据的
收集与分析。
通过仿真研究,可以有效掌握多自由度转子系统的运行
规律,并测试控制算法的有效性和实用性,从而为实际的工程应用提
供有力支撑。
总之,磁悬浮轴承多自由度转子系统的协同控制建模与仿真研究
是一个比较复杂的过程,但是却具有非常重要的现实意义。
该技术的
发展将有效解决现代科技发展面临的挑战,助力机械工程领域的发展。
磁悬浮轴承机械系统的设计

2、磁悬浮轴承机械系统的设计2.1 磁悬浮轴承的结构及材料由于磁力是控制电流和气隙的非线性函数,即在一个自由度上采用一对电磁铁,这样可以使磁力在平衡位置处能转化为控制电流和气隙的线性函数。
由于转子不仅会沿Y 轴上下运动,而且还会沿X轴水平运动,因此,在水平方向上也要设置一对差动电磁铁,如图2所示。
该图是一个实际的径向磁悬浮轴承的结构,称为8极布置的磁悬浮轴承结构。
当转子直径较大时,常采用16极布置结构以减小外径。
电磁悬浮轴承材料应具有磁性好的特点(主要指磁感应强度曲线的曲线范围大,包围的面积小)。
常采用导磁性能优良的软磁材料,一般希望材料具有较高的饱和磁感应强度、较高的相对磁导率和良好的加工性能。
这样可以提高磁悬浮轴承的承载力并减小涡流损耗。
当电磁悬浮轴承支撑高速回转轴时,其转子轴材料还应具有强度高的特点。
电磁悬浮轴承定子的材料通常采用薄硅钢片和铁钴合金等,转子材料常采用电工纯铁、10#钢,也可硅钢片叠合而成。
为了减小涡流损耗,径向磁悬浮轴承往往采用叠片结构。
而推力磁悬浮轴承通常采用整体结构。
图2 径向磁悬浮轴承结构简图2.2磁悬浮轴承系统的结构布置形式图3是本文所研究的主动磁悬浮轴承的总体结构简图。
为了进一步减少涡流损耗,在轴径处,转子也采用叠片结构,叠片材料为软磁材料。
推力盘采用铁磁材料,在旋转时,推力盘各部分都是同极性地进行励磁,涡流损失小,没有必要采用采用叠片结构,通常采用整体结构。
由于磁悬浮轴承系统常用在高速或超高速场合,一般不要驱动环节,而采用装入式电机,即将电机的转子和轴承的转子固定在同一个轴上。
磁悬浮轴承系统还要配备一对滚动轴承作为辅助轴承。
磁悬浮轴承工作时,辅助轴承不与转子接触。
当突然断电或磁悬浮轴承失控时,辅助轴承工作,临时支承高速转子,防止转子与电机和磁悬浮轴承的转子相碰,起安全保护作用。
一般采用深沟球轴承,辅助轴承与转子间的间隙通常为磁悬浮轴承气隙的1/2。
2.3电磁铁的设计关于磁悬浮轴承,规定如下的符号:A---- 磁极的截面面积(m2)D----- 转子的内径(m)d------ 转子的外径(m)δ0----- 气隙,δ0=(D-d)/2b ----- -磁悬浮轴承的轴向长度(m)B0 -----气隙处的磁感应强度[ T(特斯拉)]B S----- 饱和磁感应强度(T)I ------- 绕组的励磁电流(A),I=I0+ i 。
基于DSP的磁悬浮轴承数字控制系统硬件设计
基于DSP的磁悬浮轴承数字控制系统硬件设计张菊秀;全书海;王永生【摘要】针对多变量非线性的磁悬浮轴承控制系统,采用集中数字控制系统的硬件设计方案,给出以DSP芯片TMS320F2812为核心的控制系统硬件结构图,并对其中的关键电路进行了分析及描述.该硬件系统己经成功地应用在磁悬浮轴承控制系统中,取得了较好的控制效果.【期刊名称】《船海工程》【年(卷),期】2007(036)002【总页数】4页(P80-83)【关键词】磁悬浮轴承;数字控制;DSP;硬件设计【作者】张菊秀;全书海;王永生【作者单位】武汉理工大学自动化学院,武汉,430070;武汉理工大学自动化学院,武汉,430070;武汉理工大学自动化学院,武汉,430070【正文语种】中文【中图分类】U664.21磁悬浮轴承是利用可控磁场力将转轴无机械接触、无磨损、无润滑地悬浮并高速旋转的一种新型高性能轴承,它在航空航天、超高速超精密加工机床、能源、交通及机器人等高科技领域具有广泛的应用前景。
因为磁悬浮轴承具有不稳定性,所以对其控制系统的实时性和可靠性的要求非常高,磁悬浮轴承控制系统的设计是磁悬浮轴承系统的关键部分。
以五自由度磁悬浮磨削电主轴为研究对象,采用集中数字控制系统的硬件设计方案,以高性能的嵌入式数字信号处理器DSP芯片TMS320F2812为核心,构建了磁悬浮轴承控制系统硬件平台,为提高系统的动态性能奠定了基础。
磁悬浮轴承控制系统的控制方案可以分模拟式控制和数字式控制两种。
在早期的磁悬浮轴承控制系统大多采用了前者,而随着现代控制理论和电子技术的飞速发展,当今的磁悬浮轴承控制系统都摒弃了模拟式控制而逐渐地转向了数字控制系统,因为数字式控制具有控制精度高、动态性能优良的特点,是今后发展的主要方向[1]。
磁悬浮轴承数字控制系统主要有集散式控制系统和集中式控制系统[2]。
集散式控制系统的设计原则是分散控制,集中管理,即将控制任务按照一定的任务组合,有效地分配到多个控制点上去,各个控制点不但显示此控制点的控制信息,还要将每个控制点的运行情况传送到总机上,再由总机来构建整个轴承的控制情况,从而实现对整个控制系统的监控。
磁悬浮轴承机械系统的设计

2、磁悬浮轴承机械系统的设计2.1 磁悬浮轴承的结构及材料由于磁力是控制电流和气隙的非线性函数,即在一个自由度上采用一对电磁铁,这样可以使磁力在平衡位置处能转化为控制电流和气隙的线性函数。
由于转子不仅会沿Y 轴上下运动,而且还会沿X轴水平运动,因此,在水平方向上也要设置一对差动电磁铁,如图2所示。
该图是一个实际的径向磁悬浮轴承的结构,称为8极布置的磁悬浮轴承结构。
当转子直径较大时,常采用16极布置结构以减小外径。
电磁悬浮轴承材料应具有磁性好的特点(主要指磁感应强度曲线的曲线范围大,包围的面积小)。
常采用导磁性能优良的软磁材料,一般希望材料具有较高的饱和磁感应强度、较高的相对磁导率和良好的加工性能。
这样可以提高磁悬浮轴承的承载力并减小涡流损耗。
当电磁悬浮轴承支撑高速回转轴时,其转子轴材料还应具有强度高的特点。
电磁悬浮轴承定子的材料通常采用薄硅钢片和铁钴合金等,转子材料常采用电工纯铁、10#钢,也可硅钢片叠合而成。
为了减小涡流损耗,径向磁悬浮轴承往往采用叠片结构。
而推力磁悬浮轴承通常采用整体结构。
图2 径向磁悬浮轴承结构简图2.2磁悬浮轴承系统的结构布置形式图3是本文所研究的主动磁悬浮轴承的总体结构简图。
为了进一步减少涡流损耗,在轴径处,转子也采用叠片结构,叠片材料为软磁材料。
推力盘采用铁磁材料,在旋转时,推力盘各部分都是同极性地进行励磁,涡流损失小,没有必要采用采用叠片结构,通常采用整体结构。
由于磁悬浮轴承系统常用在高速或超高速场合,一般不要驱动环节,而采用装入式电机,即将电机的转子和轴承的转子固定在同一个轴上。
磁悬浮轴承系统还要配备一对滚动轴承作为辅助轴承。
磁悬浮轴承工作时,辅助轴承不与转子接触。
当突然断电或磁悬浮轴承失控时,辅助轴承工作,临时支承高速转子,防止转子与电机和磁悬浮轴承的转子相碰,起安全保护作用。
一般采用深沟球轴承,辅助轴承与转子间的间隙通常为磁悬浮轴承气隙的1/2。
2.3电磁铁的设计关于磁悬浮轴承,规定如下的符号:A---- 磁极的截面面积(m2)D----- 转子的内径(m)d------ 转子的外径(m)δ0----- 气隙,δ0=(D-d)/2b ----- -磁悬浮轴承的轴向长度(m)B0 -----气隙处的磁感应强度[ T(特斯拉)]B S----- 饱和磁感应强度(T)I ------- 绕组的励磁电流(A),I=I0+ i 。
磁悬浮轴承位移信号采集系统设计

缩机、轨道交通、航空航天、高精度主轴等领域。
磁悬浮轴承控制器是磁悬浮轴承系统的核心部分,其中位移信号采集系统又是磁悬浮轴承控制器的关键组成部分之一,控制器通过位移传感器获取转子的位置信息,然后通过CPU进行分析处理,输出控制信号到功率放大器。
磁悬浮轴承的各项基本性能,如刚度、阻尼、转子悬浮精度和不平衡响应都主要取决于它的控制性能。
随着智能化、数字集成化的发展,采用数字控制器是磁悬浮轴承系统发展的必然趋势,大部分磁悬浮轴承的位移信号采集系统都由数字信号处理器来实现。
本文以项目中的主动磁悬浮轴承为研究对象,采用TI公司高性能DSP芯片TMS320F28335(以下称F28335)作为控制器的CPU,以16位AD作为模拟数字转换器,采用FIR滤波器对采集的信号进行滤波处理,用VS2010编写软件接收并保存采集的数据,以便对磁悬浮轴承的运行数据进行离线分析。
1 采集系统硬件结构设计系统的硬件结构如图1所示,由信号采样及预处理、模数转换、DSP和上位机组成,由DSP采集的位移信号经处理后可通过以太网通信发送给上位机,上位机实现网络接■1.1 F28335与AD976电路设计介绍AD976是AD公司的一种高速、低功耗、单通道同步采样转换,单+5V供电的16位高速并行接口的高性能模要跨接2.2μF的钽电容;CS为片选信号,低电平有效 [1]。
F28335是TI公司的一款用于控制的高性能、多功能、高性价比的32位浮点DSP,它具有丰富的IO口、数据、地址总线等外设接口资源[2],由于F28335的IO口电平为3.3V,AD976电平为5V,为提高电路可靠性,两个芯片之■1.2 DSP与PC机之间的网络通讯硬件设计本系统采用WIZnet公司的高性能以太网接口芯片W5500作为DSP与上位机之间的以太网通信桥梁,该芯片集成了硬件TCP/IP协议栈、以太网数据链路层和以太网物理层,支持TCP、UDP等协议[3],还集成了SPI(外设串行接口)通信接口,可与 F28335无缝对接,实现DSP与2 采集系统软件设计■2.1 AD采集程序设计通过定时中断能精准控制AD采样节拍,保证采样频率44 | 电子制作 2021年06月www�ele169�com | 45信息工程固定,AD976的初始化、开始采样和数据读取均用软件实现,部分功能程序如下:void StartSample(void) //启动AD{ADCS=0; ADRC=0; delay_ns(t1) ; while(!ADBUSY);delay_ns(t2) ; ADRC=1;}void ReadData(void) //读取数据{ADRC=1; ADCS=0; result=ptrChannel; }■2.2 信号滤波程序设计由于转子位移信号的准确性在磁悬浮轴承系统中作用非常关键,由于磁悬浮轴承工作在强磁场环境,采集系统的滤波性能占有非常重要的地位,目前,数字滤波器是数字信号处理的常用方法,在下位机反馈数据给上位机之前,利用数字滤波器对采集的数据进行滤波处理,用DSP 芯片实现数字滤波具有运算速度快、稳定性好、移植方便等优点,在程序中通过修改滤波器的相关系数可十分方便地改变滤波器的带宽、截止频率等特性。
基于COMSOL和iSIGHT的磁悬浮轴承优化设计
基于COMSOL和iSIGHT的磁悬浮轴承优化设计
张骅毅;范启富
【期刊名称】《微型电脑应用》
【年(卷),期】2010(26)3
【摘要】为了提高磁悬浮轴承的性能,如何更高效、更实用的对其进行分析和设计,一直是很多学者的努力方向,为此,提出了一种COMSOL与iSIGHT软件相结合的方法.该文以8极径,向主动磁悬浮轴承为例,采用基于有限元法的COMSOL Multiphysics软件对其进行了仿真,建立起相应,的模型并得出该轴承的磁场分布,在此基础上整合多学科设计优化软件iSIGH,采用了,多岛遗传算法进一步对该模型进行优化设计,并实现了这一过程的自动化,最后得出指定约束条件下磁悬浮轴承的最优参数.结果表明,COMSOL与iSIGHT软件相结合来对磁悬浮轴承进行分析设计,是一个快捷、有效的方法,也为其他系统的仿真与优化提供了依据和参考,具有一定的现实意义.
【总页数】4页(P36-39)
【作者】张骅毅;范启富
【作者单位】
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于COMSOL和iSIGHT的涡流传感器的仿真和优化 [J], 杨骁;范启富
2.基于Isight的径向磁悬浮轴承结构优化设计 [J], 周瑾;高天宇;董继勇;陈怡;高素美
3.基于ANSYS和iSIGHT的磁悬浮轴承结构优化设计 [J], 肖林京;张绪帅;常龙;郭海
4.基于Isight的机场用向心关节轴承铰接节点优化设计 [J], 刘东雷;彭良勇
5.基于Isight的五连杆悬架硬点优化设计 [J], 王大伟
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP与FPGA的主动磁悬浮轴承控制系统设计

其中,r0 为快速因子,h 为仿真步长,h0 为滤波因子, v 等价于设定目标值 r,x1 为跟踪信号,x2 为 x1 的微分。
该系统的软件主要为 DSP 与 FPGA 的程序。系统上
电,先进行时钟使能、I/O 配置、定时器初始化、中断
初始化等操作。上位机发送“开始”命令触发 A/D 启动并
开始同步采集 15 路位移和电流信号。FPGA 读取数据并
功率放大器 功率放大器 控制器
图 1 主动磁悬浮轴承控制原理 Fig.1 Control principle of active magnetic bearing
2 主动磁悬浮轴承控制系统硬件设计 根据本文实验对象的结构特点,为实现 10 路线圈的
同步控制,控制系统需包含 5 路差分位移采样通道、10 路 电流采样通道及 20 路 PWM 输出通道。若后续转子处于 高速旋转状态,每转采样 100 个点并输出 1 次控制信号, 则相邻采样点时间间隔应小于 20μs,精度至少为 0.1%, 从开始采样到输出控制的时间应小于 2ms。根据要求设 计的控制系统硬件如图 2 所示,包括主控模块、电源模 块、传感器及测量电路模块和隔离与功率放大模块。
磁悬浮轴承由定子支撑,磁力使转子在定子的固定 范围内运动,两者之间无机械接触。相较于传统轴承, 主动磁悬浮轴承 AMB 具有无摩擦、低功耗、速度快以 及可控制等优点,被广泛应用于真空泵、飞船制动器、 人造心脏等场合 [1]。控制系统是 AMB 中最关键的部分, 其软硬件设计决定了磁悬浮能否实现,还影响到承载能 力等关键性能指标。
干扰,仿真结果如图 3 所示。可以看出,改进的 LADRC
145 Copyright©博看网. All Rights Reserved.
第 41 卷
磁悬浮主承系统的设计与优化
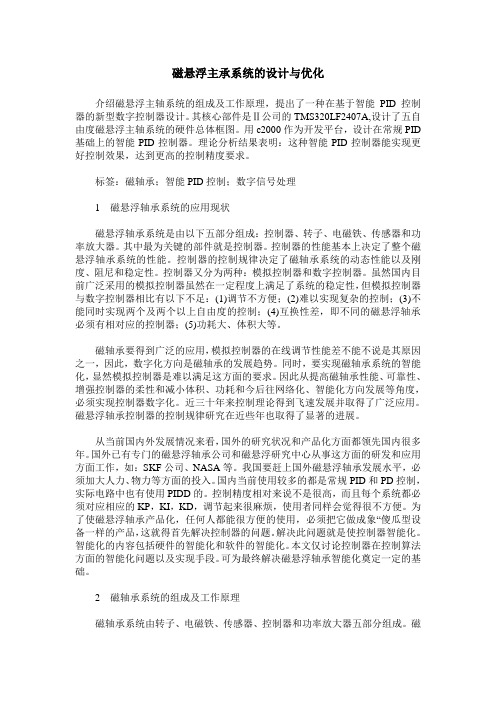
磁悬浮主承系统的设计与优化介绍磁悬浮主轴系统的组成及工作原理,提出了一种在基于智能PID控制器的新型数字控制器设计。
其核心部件是Ⅱ公司的TMS320LF2407A,设计了五自由度磁悬浮主轴系统的硬件总体框图。
用c2000作为开发平台,设计在常规PID 基础上的智能PID控制器。
理论分析结果表明:这种智能PID控制器能实现更好控制效果,达到更高的控制精度要求。
标签:磁轴承;智能PID控制;数字信号处理1磁悬浮轴承系统的应用现状磁悬浮轴承系统是由以下五部分组成:控制器、转子、电磁铁、传感器和功率放大器。
其中最为关键的部件就是控制器。
控制器的性能基本上决定了整个磁悬浮轴承系统的性能。
控制器的控制规律决定了磁轴承系统的动态性能以及刚度、阻尼和稳定性。
控制器又分为两种:模拟控制器和数字控制器。
虽然国内目前广泛采用的模拟控制器虽然在一定程度上满足了系统的稳定性,但模拟控制器与数字控制器相比有以下不足:(1)调节不方便;(2)难以实现复杂的控制;(3)不能同时实现两个及两个以上自由度的控制;(4)互换性差,即不同的磁悬浮轴承必须有相对应的控制器;(5)功耗大、体积大等。
磁轴承要得到广泛的应用,模拟控制器的在线调节性能差不能不说是其原因之一,因此,数字化方向是磁轴承的发展趋势。
同时,要实现磁轴承系统的智能化,显然模拟控制器是难以满足这方面的要求。
因此从提高磁轴承性能、可靠性、增强控制器的柔性和减小体积、功耗和今后往网络化、智能化方向发展等角度,必须实现控制器数字化。
近三十年来控制理论得到飞速发展并取得了广泛应用。
磁悬浮轴承控制器的控制规律研究在近些年也取得了显著的进展。
从当前国内外发展情况来看,国外的研究状况和产品化方面都领先国内很多年。
国外已有专门的磁悬浮轴承公司和磁悬浮研究中心从事这方面的研发和应用方面工作,如:SKF公司、NASA等。
我国要赶上国外磁悬浮轴承发展水平,必须加大人力、物力等方面的投入。
国内当前使用较多的都是常规PID和PD控制,实际电路中也有使用PIDD的。
磁悬浮测试系统的数据采集与处理
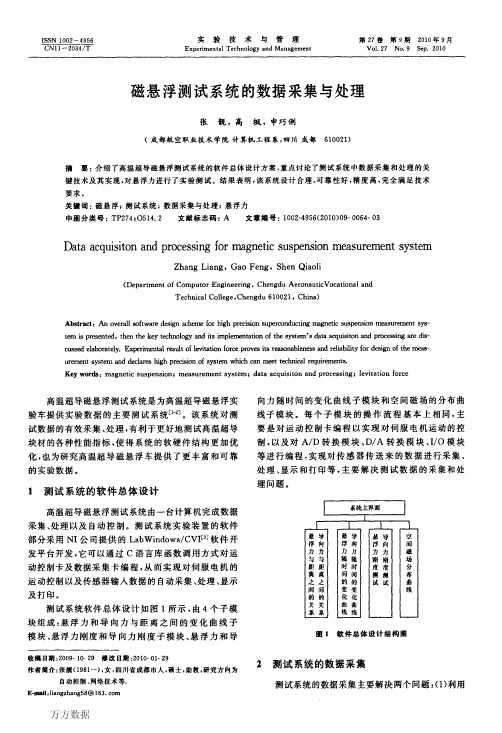
66实验技术与管理3.2.2均值技术本测试系统还采用算术平均值原理[1妇实现数字滤波来减小实验数据的误差。
3.3对数据进行曲线拟合本系统由于要求数据是实时显示,即测试到一个点就显示一个点,所以不能对数据全部采集完了之后再进行曲线拟合。
在本系统中,采用了在采集数据的同时就进行曲线拟合的方法,应用最小二乘法,对数据进行拟合、绘制曲线。
4实验测试在完成测试系统的软硬件设计后,为了验证系统的性能,对其进行了测试。
由于各个模块的结构基本一致,在实验过程中,仅以悬浮力为例,对悬浮力与位移之间的关系给出实验结果。
超导体在磁场中所受到的悬浮力和悬浮间距之间的关系没有定量的计算公式,只能对本系统的测试重复性进行验证。
在相同条件下,悬浮力,和悬浮间距D的重复测试数据见表1。
表l在不同悬浮间距下的悬浮力数据表D/ramj|N510152078.251277.48778.24278.11277.85652.87750.67552.77450.67052.66234.99633.64635.23834.02733.85l24.20023.11224.34l23.30123.63178.45651.57834.54624.17877.02152.41I33.21822.94877.31652.64133.74623.184对直接采集到的实验数据作图见图2,而测试系统对采集进来的数据进行数据滤波和直线拟合等数据处理方法后的结果如图3所示。
对比两个曲线图可以看出,数据处理可以去掉由于受到系统干扰或因系统误差而得到的奇异数据,使得系统有更好的测量精度。
测试系统的悬浮力测量精度完全可以达到±I%,完全图2数据处理前的悬浮力和悬浮间距曲线图能够满足系统的基本要求。
设置好测试参数,本测试系统便可根据所设置的参数进行测试,并可实时显示悬浮力与位移之间的关系曲线如图4所示。
从整体上来看,曲线的光滑程度很好,精确度较高,达到了测试系统的基本要求。
主动型磁悬浮轴承系统模拟控制器的设计【开题报告】
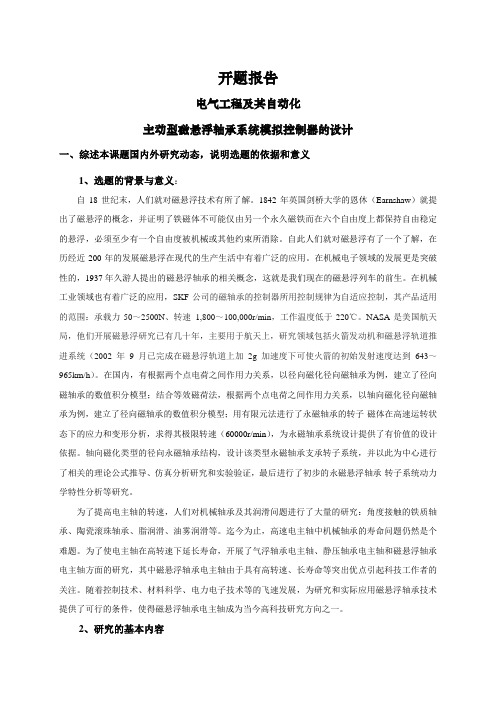
开题报告电气工程及其自动化主动型磁悬浮轴承系统模拟控制器的设计一、综述本课题国内外研究动态,说明选题的依据和意义1、选题的背景与意义:自18世纪末,人们就对磁悬浮技术有所了解。
1842年英国剑桥大学的恩休(Earnshaw)就提出了磁悬浮的概念,并证明了铁磁体不可能仅由另一个永久磁铁而在六个自由度上都保持自由稳定的悬浮,必须至少有一个自由度被机械或其他约束所消除。
自此人们就对磁悬浮有了一个了解,在历经近200年的发展磁悬浮在现代的生产生活中有着广泛的应用。
在机械电子领域的发展更是突破性的,1937年久游人提出的磁悬浮轴承的相关概念,这就是我们现在的磁悬浮列车的前生。
在机械工业领域也有着广泛的应用,SKF公司的磁轴承的控制器所用控制规律为自适应控制,其产品适用的范围:承载力50~2500N、转速1,800~100,000r/min,工作温度低于220℃。
NASA是美国航天局,他们开展磁悬浮研究已有几十年,主要用于航天上,研究领域包括火箭发动机和磁悬浮轨道推进系统(2002年9月已完成在磁悬浮轨道上加2g加速度下可使火箭的初始发射速度达到643~965km/h)。
在国内,有根据两个点电荷之间作用力关系,以径向磁化径向磁轴承为例,建立了径向磁轴承的数值积分模型;结合等效磁荷法,根据两个点电荷之间作用力关系,以轴向磁化径向磁轴承为例,建立了径向磁轴承的数值积分模型;用有限元法进行了永磁轴承的转子-磁体在高速运转状态下的应力和变形分析,求得其极限转速(60000r/min),为永磁轴承系统设计提供了有价值的设计依据。
轴向磁化类型的径向永磁轴承结构,设计该类型永磁轴承支承转子系统,并以此为中心进行了相关的理论公式推导、仿真分析研究和实验验证,最后进行了初步的永磁悬浮轴承-转子系统动力学特性分析等研究。
为了提高电主轴的转速,人们对机械轴承及其润滑问题进行了大量的研究:角度接触的铁质轴承、陶瓷滚珠轴承、脂润滑、油雾润滑等。
动力磁悬浮轴承转子位移检测系统研究的开题报告

动力磁悬浮轴承转子位移检测系统研究的开题报告一、研究背景动力磁悬浮轴承作为一种先进的轴承技术,具有重力不受限、摩擦和磨损小、稳定性高等优点,逐渐被广泛应用于高速运转的机器设备和精密仪器中。
动力磁悬浮轴承的工作原理是通过电磁力控制转子在磁场的悬浮,因此在运作时需要实时监测转子的位移情况,以保证稳定运转。
目前,动力磁悬浮轴承转子位移检测系统的研究主要集中在精度和可靠性上,但在复杂的工况下,如转子负载变化、气动力干扰等情况下往往难以实现有效的位移检测。
因此,研究一种高精度、高可靠性的动力磁悬浮轴承转子位移检测系统,对于保障设备高效稳定运行具有重要意义。
二、研究目的本研究旨在设计和开发一种基于视觉测量的动力磁悬浮轴承转子位移检测系统,结合MEMS技术、信号处理技术、计算机视觉等多个领域的技术,提高动力磁悬浮轴承转子位移监测的实时性、精度和可靠性。
该系统主要包括高精度测量传感器、数据采集与处理模块、视觉测量算法等组成。
三、研究内容和步骤1. 系统设计:根据动力磁悬浮轴承的工作原理、位移检测的要求,设计出相应的测量传感器,并设计数据采集与处理装置。
2. 视觉测量算法设计:利用MEMS技术和计算机视觉技术,提取转子的位移信息,采用多种算法进行优化和比较,达到高精度、高实时性的效果。
3. 系统实现:将系统中各个组件进行完整整合装配,测试系统的精度、在复杂工况下的适用性,调整系统的参数等。
4. 实验测试:对系统进行实验测试,比较不同装配条件下及不同工作状态下测量精度的变化,以验证该系统各模块的有效性。
四、研究意义和创新点本研究将尝试利用MEMS技术和计算机视觉技术提高动力磁悬浮轴承转子位移检测精度和实时性,实现在复杂工况下的可靠运行。
同时,该研究也将推动动力磁悬浮轴承转子位移检测技术的发展,为轴承技术的研究提供新思路和新方法。
磁悬浮测试系统的数据采集与处理
实
验
技
术
与
管
理
第2 卷 7
第 9期
21 0 0年 9月
订二
Ex e i n a c n l gy a d M a a e e t p rme t lTe h o o n n g m n
V o . 7 N o 9 Se . 2 1 1gne i u pe son; m e ur m e y t m ;da a a qu st n nd pr e sng; lvia i or e tc s s n i as e nts s e t c i io a oc s i e t ton f c
悬 导
悬 导
悬
导
发平 台开 发 , 它可 以通过 C语 言 库 函 数调 用 方式 对 运
Daaaq ii na dpo esn o g ei s s e s nme s rme ts se t c ust n rcsig frma n t u p n i au e n ytm o c o
Z a g Lin h n a g,Ga n oFe g,S e a l h n Qio i
tr sprs n e e i ee td,t n t e e hn l g nd i mp e n ain ft es se ’ a aa q ii n n o e sn r s n he hek yt c o o y a t i lme t t o h y tm Sd t c ust a d pr cs ig a edi— s o o
Ab t a t sr c :An o e al o t r e in sh me f rhg rcs n s p ro d cig ma n t u p n in me s r me ts s v r l s fwae d s c e o ih p e i o u e c n u t g ei s s e s a u e n y — g i n c o
主动磁悬浮轴承监控系统设计及验证
主动磁悬浮轴承监控系统设计及验证任正义;李乃安【摘要】文中以10kWh飞轮储能系统的主动磁悬浮轴承为研究对象,设计了主动磁悬浮轴承转子运动监控系统,实现了对轴承转子运动的实时监控,转子的转速、位移、轴心轨迹等数据的采集与保存.监控系统可以有效地观察转子振动,准确分析转子在不同转速时转子振动特性,防止因为振幅过大而引起转子碰撞轴承.【期刊名称】《机械工程师》【年(卷),期】2018(000)001【总页数】4页(P11-14)【关键词】主动磁悬浮轴承;LabVIEW;转子振动【作者】任正义;李乃安【作者单位】哈尔滨工程大学工程训练国家级实验教学示范中心,哈尔滨150001;哈电集团哈尔滨电站阀门有限公司,哈尔滨150060【正文语种】中文【中图分类】TH133.7主动磁悬浮轴承是磁轴承的一种,是综合了机械设计、转子动力学、电磁设计、复合材料、控制工程的机电一体化产品[1-2]。
与普通接触式轴承相比,其具有转速高、寿命长、耐磨损和无需润滑的优点,被称为未来最有潜力的轴承。
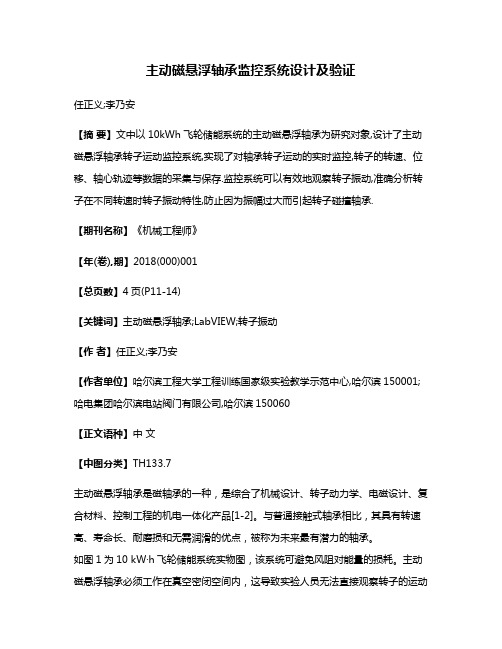
如图1为10 kW·h飞轮储能系统实物图,该系统可避免风阻对能量的损耗。
主动磁悬浮轴承必须工作在真空密闭空间内,这导致实验人员无法直接观察转子的运动姿态。
此外10 kW·h飞轮储能系统的转子重量为650 kg,最高转速高达16 000 r/min,所以从安全角度出发,远程监控系统是非常必要的。
监控系统不仅要求可以远程实时准确检测转子振动信息,而且在必要时紧急关断电机驱动器。
主动磁悬浮轴承是利用磁场力将转子悬浮在磁场中,使轴承定子和转子之间无任何直接的物理接触。
主动磁悬浮轴承控制系统主要包括控制器、功率放大器、位移传感器、轴承的定子和转子,如图2所示[3]。
由图2可知,控制器输出的矫正信号经过功率放大器变成电流,以差动方式驱动电磁铁产生电磁吸力,强迫转子恢复到稳态位置。
当外界干扰使转子产生向下的偏移量y时,这时转子与上电磁铁之间的气隙为y0+y,与下电磁铁之间的气隙为y0-y。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
the姗pled voltage蛐.The nous.After calculating
datum,the DSP sives D/A results,which translates the hexadecimal datum to analog
p瞰m懒in control goftws.1℃is downloaded to a 16 K flash ROM integrated in DSP with a JTAG interface.In order to rewrite
磁悬浮轴承系统由受控的电磁铁、检测转子位 移的传感器、控制器和功率放大器5个主要部分组 成。这个平台的关键是三套永磁直线悬浮电机驱动 装置,文献[2]中对磁场力提供悬浮力和水平驱动
收稿日期:2006-11.13; 收修定稿日期:2006-11-28 基金项目:辽宁省教育厅基金资助项目(200417014) 作者简介:关新(1966-)。女,辽宁丹东人,讲师,博士,主要从事电机与电器、鲁棒控制、智能控制等方面的教学与科研工作;郭
软件采用JTAG接口下栽到DSP的内部闪存。为了方便实时改写参数,还设计了DSP与计算机
通讯接口。仿真结果表明,这种控制方案有较好的动态和静态特性。
关键词:主动磁悬浮轴承平台;数字信号处理;6自由度;同步采样
中图分类号:TP 703
文献标识码:A
Design of Synchronous Data Acquisition Systems for 6一DOF Magnetic Suspension Bearing
三边工作原理是相同的,因此只讨论模型左边 悬浮情况,如图2所示。
Ⅵ伍一
二回飓;一
(∞两边
图2 PAMB的左轴承
№.2 The left bea衄0fPAMB
由图2可知:
F№=F由.1.叩一,血.f,曲。
(1)
声庐酬,曲吼=‰.j.h一声别
(3)
声=Ⅳ.,,(南Po+赤Po 用Hopkinson法则,得: 产,,岫。^
稳态值附近的局部放大曲线,如图8所示。
.图7 y方向的响应曲线
魂·7 Tile response cllrve of Y direction
参考文献(References):
图81 y方向响应曲线的局部放大 Fig.8 The raraai enlarge response curve of Y direction
为解决这些问题,提高伺服系统性能,并在被 控对象的参数变化时快速处理并保证系统稳定,顺 利实现复杂控制算法,以6自由度磁悬浮平台为研 究对象,设计了同步数据采集与实时处理系统。
2磁悬浮平台系统(PAMB)结构 磁悬浮平台的系统结构,如图1所示。
图1磁悬浮系统结构图
№.1 Structure of magnetic¥11¥pe戚oa system
D/A转换器采用的是DACl210芯片。它具有12 位数据输入端,一个8位输入寄存器,一个4位输 入寄存器共同组成12位数据输入寄存器。两个输 入寄存器的输入允许控制都要求cs和WR。为低电 平,其中8位输入寄存器的数据输入还要求Bl/B2 端为高电平怕J。
3)通讯、存储器模块通讯模块包括一个 JTAG接口和一个RS232C串行通讯接口。其中 J’rAG接口用于将程序从计算机下载到DSP芯片的 闪存中;串行通讯接口用于在线测量磁悬浮轴承控 制参数。
real-time,the
DSP systefn and PC is connected by a RS232C communication interface.The results of simulation show the proposed 8chellle have better dy·
m理脚bearing;disital n枷c lmd stalic char锄cte蒯cs.
4软件设计思想
开机后系统正常工作,软件流程,如图4所 示。
鲎.
i五
将采集刭的数据保存在片外RAM
—寓—T一 数据回送PC机
图4软件流程图
rig.4 11蟹flowchart of software
一旦需要参数调整,就将COM口与通讯线连 接,运行调试软件,DSP接到控制参数和运行命令 后就运行,且将传感器采集的信号存人数据存储 器。存满后,系统停止运行将数据传回计算机。计 算机对采集的现场信号分析、处理,工作人员进行 修改,为下次运行准备。本系统用汇编语言编写 DSP系统软件,现场参数调试软件用C++编写。
同步数据采集与实时处理系统,如图3所示。
上
—删功率放大器}_ 叫A/D卜- 转换电路
、//// 、
/ /f
位
▲。
机
DSP
从W 控
苴
制
兀
-圆;)翰传冀掣 系
硝功率放大器匕- 统
)
tll
/毫子.
,
L———一。。。
Fig.3
图3同步数据采集系统 The system of synchronous data acquisition
产r。由。 A)(4)
由服磁能㈤方程式u:=吉等={舄㈣
耻一掣h。…= 能够计算出磁阻力:
一乏一12貉A‰:一。, a2由产o。户r‘。‘’2㈣‘)
(、6”)7
F№一i1南. (7)
将式(2),式(3)代入式(7),得:
F埔2菰去习(‰峄一‰~ (8)
各参数值可参考文献[3]选择得到。M和,方 程如下:
采用ATMEL公司生产的CMOS FLASH EPROM 芯片,即两片8位32 K的AT29C256组成16位32 K 存储器。由于它的扇区写特点,可使其中的16 K 为片外程序存储器,用于DSP系统的开发;另一部 分作为数据存储器保存磁悬浮轴承系统状态参数。
4)功率放大器模块 采用开关功率放大器, 其中大功率管的指标为400 V/20 A。功率开关频率 R应大于控制信号上限截止频率R的8倍。
(、13~)
LY=Cx
式中,工=(互声妒堡cgt粥at孙r;A=0r。.K:);
肚I.,‘K J。
m料∽翥一斟㈢
3硬件设计
块‘4|。 控制传感器信号的采样、运算。它集成了两个8选 个完全比较单元可用于脉宽调制PWM的输出。带
·80·
控制 工程
第15卷
片将3个定时器、4个事件捕获单元、双10位MD 转换器、16个多路开关、16 K的ROM、SCI与SPI 接口集合成一体,简化了外围电路,提高了可靠 性、运算速度和控制精度b]。
大行程舅×Y为160 mill×160 mm,‰=50 V, L=2 A,a=2.1 III,孑,J=0.057 5 kg·m2,凡=
7 N。m=3.37 kgo
在t=0.5 s,给定石?=3 mill,y?=0,妒?=0 时的x方向位置响应曲线,如图5所示。
№.5
图5 X方向的晌应曲线 The response OLIi'Ve of X diremon
庆鼎(19,9-),男,辽宁盖县人,教授,博士生导师。
万方数据
第1期
关新等:6-DOF磁悬浮轴承同步数据采集系统设计
·79·
力进行了论述。系统由控制器、转子和定子、传感 器、功率放大器组成。转子位置由传感器测得,并 将其偏差信号反馈给控制器,改变电磁铁吸引力, 从而使转子保持在平衡位置。
为简化计算,忽略了机械变形,视磁悬浮平台 为刚体。图中驱动三自由度平台的三个永磁直线电 机装置的定子为u形结构的三边,动子为T形,并 在u形空间中运动。工作平台与T形动子连接b J。
cording to the mathematical model,a real-time data acquisition and processing system for PAMB is introduced.Dig眦sigIlal processor is used
to control the system and to sample displacement骶鹏。礴吕ignals.Two analog to digital converts a砖integrated in DSP to sample damn synehro·
a2=
a2
K·[三]+五·[兰]+G:.,·
a2拳 a2
(12)
血
a2
r 9.03×lO'0
式中,K=l 0
4.82×lO'
【一22.1×103 o 一 姗。碱
f,lo·6
墨=I一1.34
I o.54
1 10·6 42·5
1.34 0 IO o.53—4.20J
所以PAMB的状态空间方程为
f扛Ax+砌
Key W01血:planar active
s培rld processor;6 degrees of freedom;synchromm柏mpile
1引 言
主动磁悬浮轴承在国外的研究有较长的历史, 目前已进入应用阶段,而磁悬浮平台的研究,在国 外只有少数发达国家如法国、荷兰、美国等进行了 这方面的研究和设计,并取得了一定的成果。现在 磁悬浮技术已经成功应用于精密的运动控制中,但 对于这种具有较高运动速度、加速度的磁悬浮定位 平台,为了实现高精度的控制,它的机械耦合、速 度耦合及悬浮力耦合等不可忽略,必须采用复杂的 控制算法,如解耦控制等…,这就需要对多个传感 器信号进行同步采集,并实时运算,输出控制信 号,这说明实际应用时运算量较大、成本高。
CA/AN Xin,GUO Qing-ding
Electrical聊Il嗍吨,Shenyang (School 0f
University《Technology,Shenyang 11(1Y23,China)
Ab武嘣:6-DOF planar active nlagll胡C bearing(PAMB)system is studied,and the ck哦IcteIs of the controlled object are considered.Ac-