RSX-7900系列角度传感器NOVOHALL原理,非接触式
瑞士罗卓尼克温湿度传感器的原理与优点

瑞士罗卓尼克温湿度传感器的原理与优点瑞士罗卓尼克温度传感器是采用温度元件作为检测元件的传感器。
它首先把被测量的变化转换成数字信号的变化,然后借助温度元件进一步将温湿度信号转换成数字信号。
温度传感器一般由湿敏电阻源、温度传感器通路和温度元件三部分组成。
温度检测方法具有精度高、反应快、非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此,温度式传感器在检测和控制中应用广。
湿敏电阻是常见的湿度传感器。
湿敏电阻的外型与一般二极管一样,只是它的管壳上开有一个嵌着玻璃的窗口,以便于光线射入,为增加感应面积,PN结的面积做得较大,湿敏电阻工作在反向偏置的工作状态下,并与负载电阻相串联,当无光照时,它与普通二极管一样,反向电流很小,称为湿敏电阻的暗电流;当有光照时,载流子被激发,产生电子-空穴,称为温度载流子。
在外电场的作用下,温度载流子参于导电,形成比暗电流大得多的反向电流,该反向电流称为温度流。
温度流的大小与光照强度成正比,于是在负载电阻上就能得到随光照强度变化而变化的电信号。
一、烟尘浊度监测仪防止工业烟尘污染是环保的重要任务之一。
为了消除工业烟尘污染,首先要知道烟尘排放量,因此须对烟尘源进行监测、自动显示和标报警。
烟道里的烟尘浊度是用通过光在烟道里传输过程中的变化大小来检测的。
如果烟道浊度增加,光源发出的光被烟尘颗粒的吸收和折射增加,到达光检测器的光减少,因而罗卓尼克温湿度传感器输出信号的强弱便可反映烟道浊度的变化。
二、瑞士罗卓尼克温度传感器温度池在温度检测和自动控制方面的应用温度池作为温度探测使用时,其基本原理与光敏二极管相同,但它们的基本结构和制造工艺不全相同。
由于温度池工作时不需要外加电压;温度转换效率高,光谱范围宽,频率特性好,噪声低等,它已广地用于温度读出、温度耦合、光栅测距、激光准直、电影还音、紫外光监视器和燃气轮机的熄火保护装置等。
①瑞士罗卓尼克温度传感器检测距离长如果在对射型中保留10m以上的检测距离等,便能实现其他检测手段(磁性、声波)无法离检测。
转向角传感器工作原理

转向角传感器工作原理
转向角传感器是一种能够测量物体旋转角度的传感器,广泛应用于航空航天、汽车、船舶等领域。
它通过检测物体相对于参考方向的旋转角度,可以帮助控制系统准确地获取目标物体的姿态信息,进而实现精确的控制。
转向角传感器的工作原理主要基于惯性测量和电子学技术。
在传统的机械式转向角传感器中,通常采用陀螺仪或加速度计等惯性元件来感知物体的旋转运动。
当物体发生旋转时,惯性元件会受到作用力的影响而产生相应的信号输出,通过电子电路进行处理后,就可以得到物体的转向角度信息。
随着技术的不断发展,现代转向角传感器大多采用MEMS(Micro-Electro-Mechanical Systems)技术制造,具有体积小、功耗低和响应速度快等优点。
这些传感器通常集成了陀螺仪、加速度计、磁力计等多种传感器元件,通过复杂的算法处理,可以实现更加精确的转向角度测量。
在实际应用中,转向角传感器通常与其他传感器或系统结合使用,例如与GPS、惯性导航系统(INS)等配合,以提高姿态测量的准确性和稳定性。
通过不断优化传感器的设计和算法,现代转向角传感器已经可以实现高精度的姿态测量,广泛应用于飞行器、汽车稳定控制、工业机器人等领域。
总的来说,转向角传感器是一种重要的姿态传感器,它通过测量物体的旋转角度,帮助控制系统获取准确的姿态信息,实现精确的控制。
随着技术的不断进步,转向角传感器在各个领域都有着广泛的应用前景,将为人类的生活和工作带来更多便利和安全。
角度测量仪原理

角度测量仪原理
角度测量仪原理是利用旋转传感器测量物体的旋转角度。
旋转传感器通常由旋转装置、传感器元件和信号处理器组成。
旋转装置是一个可旋转的部件,通常是由金属或磁性材料制成。
它安装在要测量角度的物体上,并随着物体的旋转而旋转。
传感器元件通常是一种能够感应并测量旋转运动的物理量的装置。
根据不同的原理,常见的传感器元件有磁性传感器、电容传感器和光学传感器等。
磁性传感器通过测量磁场的变化来确定旋转角度,电容传感器则利用电容的变化来测量旋转角度,光学传感器则利用光学原理来测量旋转角度。
信号处理器是对传感器测量到的信号进行处理和转换的装置。
它能够将传感器测量到的物理量转换为电信号,并进行放大、滤波、数字化等处理,最终输出角度测量结果。
在测量过程中,旋转装置随着物体的旋转而发生旋转,传感器元件感应到旋转装置的运动,并将其转化为相应的电信号。
信号处理器对电信号进行处理后,提取出物体的旋转角度,并以数字形式输出。
通过这种原理,角度测量仪可以准确地测量物体的旋转角度。
它广泛应用于工业自动化、机械加工、航空航天等领域,为各种旋转运动的测量和控制提供了重要的技术支持。
非接触测量百花齐放 蓝鹏几种非接触测量仪器原理

非接触测量百花齐放蓝鹏几种非接触测量仪器原理凤凰:蓝鹏测控科技:非接触测量百花齐放蓝鹏几种非接触测量仪器原理快传:蓝鹏讲测量:非接触测量百花齐放蓝鹏几种非接触测量仪器原理搜狐:蓝鹏:非接触测量百花齐放蓝鹏几种非接触测量仪器原理网易:蓝鹏科技:非接触测量百花齐放蓝鹏几种非接触测量仪器原理维科:蓝鹏测控:非接触测量百花齐放蓝鹏几种非接触测量仪器原理一点:蓝鹏测量:非接触测量百花齐放蓝鹏几种非接触测量仪器原理微博:蓝鹏测径仪厂家:非接触测量百花齐放蓝鹏几种非接触测量仪器原理腾讯:蓝鹏测控厂家:非接触测量百花齐放蓝鹏几种非接触测量仪器原理贴吧:蓝鹏讲测控:非接触测量百花齐放蓝鹏几种非接触测量仪器原理非接触测量百花齐放蓝鹏几种非接触测量仪器原理随着技术发展,传统的接触测量方式已经不能满足生产需求,非接触测量方式必将得到大的发展,我们致力于非接触测量的产品开发,目前有很多非接触的测量仪器研发出来,测径仪、测宽仪、测厚仪、测长仪等均是非接触的测量设备。
目前蓝鹏非接触测量仪器常用的测量原理有光电测量原理、激光测量原理、图像法测量原理等。
它们的非接触测量很好的对被测物进行高质量的检测。
光电测径仪是主打产品之一,它没有易损部件,同时可对运动中的轧材进行非接触的在线检测,使用寿命长,是激光测径仪的替代产品。
每组测头由发射镜头和接收镜头组成。
发射镜头内点光源发出的光通过发射透镜形成平行光视场射向接收镜头。
平行光再由接收透镜聚焦,通过位于焦点位置的光阑小孔后在接收单元上成像。
当视场中通过被测物时,被测物遮挡的部位将在接收单元的芯片上呈现出边界清晰的阴影。
通过光电转换和数字化处理,即可通过阴影的宽度计算出被测物的直径。
激光测厚仪是由上下两个对射的激光测距传感器组成的,工作时上下两个传感器分别测量传感器与被测物上、下表面的距离,用两个传感器之间的总距离减掉两个传感器测量的距离即可得到被测物的厚度。
激光测厚仪的优点在于它是非接触测量,不会因为磨损而损失精度,尤其适用于对运动物体的测量。
NOVOHALL 旋转传感器 无触摸 RFE-3200 电压 移动应用数据参考表说明书
NOVOHALL Rotary Sensor TouchlessRFE-3200VoltageMobile ApplicationsPreliminary Data sheetSpecial Features• Touchless hall technology • Electrical range up to 360°• 2-part, mechanically decoupled• High protection class IP67, IP68, IP69K • Resolution up to 12 bit • Wear-free• Temperature range -40 °C to +125 °C • Single and dual-channel versions• Optimized for use in mobile applications with highest EMC requirements such as ISO pulses and high interferences to ISO 11452 and ECE-Standard• Suitable for safety-related applications according to DIN EN ISO 13849• Other configurations see separate data sheetsApplications• Mobile working machines (industrial trucks, construction machinery, agricultural and forestry machinery)• Marine applicationsThe two-part design consisting of sensor and magnetic position marker offers great flexibility when mounting. The absence of shaft and bearing makes the assembly much less sensitive to axial and radial application tolerances - separate couplings are obsolete.Measurements can be made transmissively through any non-ferromagnetic material.The sensor is perfectly suitable for use in harsh environmental conditions through the completely encapsulated electronics.Single and dual-channel versions are available and suitable for use in safety-related applications.Description Material Housing: high grade, temperature resistant plastic PBT GF30 with SS inserts MountingWith 2 lens head screws M4x18 (included in delivery)Fastening torque of mounting max. 200 NcmElectrical connection 6-pin MQS-connector, code A, tinned contact according to drawing AMP-114-18063-126, Index A1 (Connector: AMP P/N 1-967616-1)Mechanical Data Dimensions See dimension drawing Mechanical travel 360° continuous Weightapprox. 50 gSpecificationsAccessories included in delivery• 2x Lens head screws M4x18CAD data seewww.novotechnik.de/en/download/cad-data/When the marking of theposition marker pointstowards the connector,the sensor is near theelectrical center position.Technical DataType RFE-32_ _-_ _ _-3_ _-521VoltageOutput signal0.25 ... 4.75 V0.5 ... 4.5 VLoad≥ 10 kΩNumber of channels 1 / 2Diagnosis activated (in case of error, output signal is outside of the plausible signal range)Update rate typ. 3.4 kHzMeasuring range0 ... 30° up to 0 ... 360° in 10°-stepsIndependent linearity≤ ±0.5 %FSResolution12 bitsRepeatability typ. ≤ ±0.1°Hysteresis typ. < ±0.1°Only easuring range 360°: typ. < 0.25° (lower hysteresis on request)Temperature error Measuring range 30 ... 170°: typ. ±1.0 %FS, Measuring range ≥ 180°: typ. ±0.5 %FSSupply voltage Ub12/24 VDC (8 ... 34 VDC)Current consumption w/o load typ. 12 mA per channelOvervoltage protection60 VDC (10 min.)Polarity protection yes (supply lines and outputs)Short circuit protection yes (vs. GND and supply voltage)Insulation resistance (500 VDC)≥ 10 MΩEnvironmental DataMax. operational speed Mechanically unlimitedVibration IEC 60068-2-620 g, 5 ... 2000 Hz, Amax = 0.75 mmShock IEC 60068-2-2750 g, 6 msProtection class ISO 20653IP67 / IP68 / IP69KOperating temperature-40 ... +125°C** The max. operating temperature depends on supply voltage Ub (see temp.diagram)Life Mechanically unlimitedFunctional safety Suitable for safety-related applications according to ISO 13849 after customer validation.Further safety data ( DCavg...) and support for functional safety are available on request.MTTF (IEC 60050)447 years (per channel)MTTFd (EN ISO 13849-1 parts count894 years (per channel)method, w/o load)MTTFd-certificate https://www.novotechnik.de/en/downloads/certificates/mttfd-certificates/Traceability Serial number on type labeling: production batch of the sensor assembly and relevant sensor componentsEMC CompatibilityISO 10605 ESD (Handling/Component)8 kV / 15 kVISO 11452-2 Radiated HF-fields100 V/mISO 11452-5 Radiated HF-Fields, stripline200 V/mCISPR 25 Radiated emission Level 5ISO 7637-2 Transient Emissions Level 3ISO 7637-2 Pulses on supply lines(1, 2a, 2b, 3a, 3b, 4, 5) Level 4ISO 7637-3 Pulses on output lines Level 4EN 13309 Construction machineryEmission/Immunity E1acc. to ECE-R10ISO 13766-1/-2 Construction machinery On requestTechnical DataOutputCharacteristics Temperature DiagramOutput characteristic Output characteristicOutput characteristic Output characteristicOutput characteristic Output characteristicZ-RFC-P23Position marker for fixation with threaded pin M4 (included in delivery)Caution: For orientation of the output characteristic please follow the user manual of the position marker!Material PA6-GF± 3 mmMax. permittedradial offsetP/N Pack. unit [pcs] 400056074140005608525Z-RFC-P43Position marker for fixation with threaded pin M4 (included in delivery)Caution: For orientation of the output characteristic please follow the user manual of the position marker!Material PA6-GF± 3 mmMax. permittedradial offsetP/N Pack. unit [pcs] 400105041140010504225Z-RFC-P30Position marker for frontal fixation with 2 cylinder screws M3x8 (included in delivery)Material PBT-GFMax. permitted± 1.5 mmradial offsetP/N Pack. unit [pcs] 400056086140005608725Z-RFC-P31Position marker for frontal fixation with 2 cylinder screws M3x8 (included in delivery)Material PBT-GF± 3 mmMax. permittedradial offsetP/N Pack. unit [pcs] 400056088140005608925Z-RFC-P22Position marker for frontal fixation with 2 cylinder head screws M4x20 (with microencapsulation, included in delivery).Attention: Closed side of position marker faces the active side of sensor.Material Aluminium, anodized± 4 mmMax. permittedradial offsetOperating temp.-40 ... +125°CP/N Pack. unit [pcs] 400106735140010673625Z-RFC-P18Screw position marker M10 x 25 mm, similar DIN 933, magnet pottedMaterial Aluminium, anodizedMax. permitted± 3 mmradial offsetP/N Pack. unit [pcs] 400104756140010475725Z-RFC-P19Screw position marker M8 x 25 mm, similar DIN 933/ISO 4017, magnet pottedMaterial Aluminium, anodized± 1.5 mmMax. permittedradial offsetP/N Pack. unit [pcs] 400104754140010475525Z-RFC-P20Screw position marker M10 x 25 mm, similar DIN 933Material Aluminium, anodizedMax. permitted± 3 mmradial offsetP/N Pack. unit [pcs] 400104758140010475925Z-RFC-P03Magnet for direct application onto customer’s shaft (see user manual).We recommend mounting on non-magnetizable materials, otherwise the specified working distances will vary (e.g. reduction of approx. 20% with axial mounting on a magnetizable shaft).± 1.5 mmMax. permittedradial offsetP/N Pack. unit [pcs] 400005658140005608150Z-RFC-P04Magnet for direct application onto customer’s shaft (see user manual).We recommend mounting on non-magnetizable materials, otherwise the specified working distances will vary (e.g. reduction of approx. 20% with axial mounting on a magnetizable shaft).± 3 mmMax. permittedradial offsetP/N Pack. unit [pcs] 400005659140005608250Working Distances Position Markers [mm] - Single-channel VersionsZ-RFC-P03Z-RFC-P04Z-RFC-P18Z-RFC-P19Z-RFC-P20Z-RFC-P22Z-RFC-P23Z-RFC-P30Z-RFC-P31Z-RFC-P43 0.4 ... 1.9 2 ... 4.70 ... 40 ... 1.8 2 ... 4.7 4.1 ... 8.9 2 ... 4.70.4 ... 1.9 2 ... 4.70 ... 2.4Working Distances Position Markers [mm] - Redundant VersionsZ-RFC-P03Z-RFC-P04Z-RFC-P18Z-RFC-P19Z-RFC-P20Z-RFC-P22Z-RFC-P23Z-RFC-P30Z-RFC-P31Z-RFC-P43 0... 1.5 1.6 ... 4.20 ... 3.50 ... 1.3 1.6 ... 4.2 3.6 ... 8.4 1.6 ... 4.20 ... 1.5 1.6 ... 4.20 (2)Lateral Magnet OffsetLateral magnet offset willcause additional linearity error.The angle error, which iscaused by radial displacementof sensor and position markerdepends on the used positionmarker or magnet.Additional Linearity Error at Radial Displacement - Single-channel VersionsZ-RFC-P02 / P04 / P08Z-RFC-P20 / P23 / P31Z-RFC-P41 / P43 / P47Z-RFC-P03 / P30Z-RFC-P18Z-RFC-P19Z-RFC-P220.5 mm: ±0.4°1.0 mm: ±1.1°2.0 mm: ±3.5°0.5 mm: ±0.4°1.0 mm: ±1.1°2.0 mm: ±3.5°0.5 mm: ±1.4°1.0 mm: ±3.7°2.0 mm: -0.5 mm: ±0.7°1.0 mm: ±1.3°2.0 mm: ±3.3°0.5 mm: ±1.3°1.0 mm: ±2.6°2.0 mm: -1.0 mm: ±0.8°2.0 mm: ±1.8°4.0 mm: ±5.4°Additional Linearity Error at Radial Displacement - Redundant VersionsZ-RFC-P02 / P04 / P08Z-RFC-P20 / P23 / P31Z-RFC-P41 / P43 / P47Z-RFC-P03 / P30Z-RFC-P18Z-RFC-P19Z-RFC-P220.5 mm: ±0.7°1.0 mm: ±1.8°2.0 mm: ±5,2°0.5 mm: ±0.7°1.0 mm: ±1.8°2.0 mm: ±5.2°0.5 mm: ±2.5°1.0 mm: ±6.4°2.0 mm: -0.5 mm: ±1.1°1.0 mm: ±2°2.0 mm: ±4.6°0.5 mm: ±2.3°1.0 mm: ±4.5°2.0 mm: -1.0 mm: ±1.1°2.0 mm: ±2.4°4.0 mm: ±6.7°Connector System MQSMQS Micro Quadlok SystemConnector kit including• 1 plug socket (female), AMP P/N 1-967616-1• 6 tinned contacts for cable cross-section area 0.3 ... 0.5 mm² (AWG 22), AMP-P/N 963727-1• 6 single conductor sealings AMP P/N 967067-2P/N Type400005666EEM-33-34Novotechnik U.S., Inc.155 Northboro RoadSouthborough, MA 01772Phone 508 485 2244Fax 508 485 2430********************© Mar 25, 2021The specifications contained in our datasheets are intended solely for informational purposes. The documented specification values are based on ideal operational and environmental conditions and can vary significantly depending on the actual customer application. Using our products at or close to one or more of the specified performance ranges can lead to limitations regarding other performance parameters. It is therefore necessary that the end user verifies relevant performance parameters in the intended application. We reserve the right to change product specifications without notice.。
一种新型病床角度测量器的设计
一种新型病床角度测量器的设计发布时间:2021-08-23T15:52:04.333Z 来源:《护理前沿》2021年11期作者: .任晓佳[导读] 在日常护理工作中需要根据患者的病情对病床角度进行合理调节任晓佳山西白求恩医院神经外科,太原 030032)摘要:在日常护理工作中需要根据患者的病情对病床角度进行合理调节,病床角度的准确对于患者病情恢复是至关重要的,为了能够准确进行病床角度调节,本文设计一种新型结构的病床角度测量器,护理人员在对病床角度进行调节时,可实时观察角度测量器的表盘,进而精确地完成病床角度的调节。
关键词:病床角度;调节;角度测量器0 引言目前大多数科室采用的床头抬高方法是:护士根据日常工作经验进行摇床,但有些疾病对床头抬高的角度精确度要求较高[1],如不能精确调整将会影响患者的治疗效果,从而带来安全隐患[2-3]。
因此,在临床护理工作中,设计一种准确测量、精确显示病床角度的工具是非常有必要的[4-5],经过查阅相关文献,本文设计一款新型的病床角度测量器,此次设计的病床角度测量器可以在病床背部折板抬起的过程中实时准确地显示病床的背部折板相对应的角度,将病床的背部折板抬升量数字化,提高了临床治疗效果,降低了护理难度[6]。
1 结构设计与原理1.1 病床角度测量器构成本次研究的床旁角度测量器由透明外壳,拉线,弹簧,指针,滑轮1支撑,滑轮2支撑组成,透明外壳外部设有不均匀刻度,刻度从上到下依次设有刻度线,弹簧的一端与长方体容器相连,弹簧另一端和拉线相连,拉线的另一端和病床背部折板相连,角度测量器结构示意图如图1所示。
图1 角度测量器结构示意图1.2 病床角度测量器原理角度测量器原理示意图如图2所示,其中图(a)为病床背部折板抬升实物图,图(b)为几何关系原理图,病床背部折板的抬升刻度(A)、背部折板(C)以及病床框架(B)恰好为直角三角形关系,其中C的值是固定不变的,A、B、D是变化的,由三角关系就可将病床抬升角度转换为A值的变化,由三角关系可以得到A值的表达式如下;(1)已知标准的病床背部折板长度C=69cm,在临床护理中经常用到的护理角度D=0o、15o、30o、45o、60o,将A和D值代入公式(1)中就可得到病床背部折板抬升量,用此抬升量作为抬升角度刻度,就可清晰明了表示,换算抬升量刻度表如表1所示。
非接触式温度传感器原理

非接触式温度传感器原理非接触式温度传感器是一种不接触被测物体而能测量其表面温度的传感器。
其基本原理是利用被测物体产生的红外线辐射量与其温度之间的关系实现温度的测量。
由于温度的单位为热力学温标上的K或C,这里以k作为温度单位。
当物体的温度高于绝对零度(0 K)时,它会发出红外辐射。
这种辐射是一种电磁波,其频率范围为1.5×10^11Hz至3×10^14 Hz。
在这个范围内的电磁波称为红外线,其波长为0.78µm到1000µm。
非接触式温度传感器通常利用被测物体表面发出的红外线辐射量测量其表面温度。
当这些红外线进入传感器时,它们通过一个光学组件(例如透镜或反射镜)被聚焦到一个热电偶上。
热电偶测量到的温度差异随着红外线的变化而变化,这使得传感器能够测量被测物体的表面温度。
非接触式温度传感器的一个重要优点是它与被测物体之间没有物理接触,从而避免了可能出现的干扰或损伤。
此外,其应用涉及出现温度不稳定或变幻的环境时,表现更为优秀。
然而,这些传感器的精度受到如下因素的影响:1. 被测物体的气体或污染物的存在会干扰传感器的测量。
2. 被测物体的表面可能受到反射光的干扰,从而干扰传感器的测量结果。
这是由光学学原理所决定的。
例如,深色物体可能吸收较多的红外光,而浅色物体则可能反射较多的红外光。
3. 温度的变化率可能会影响传感器的测量结果。
如果被测物体的温度变化较快,非接触式温度传感器可能无法快速响应,从而影响测量精度。
4. 传感器的分辨率可能影响其精度,高分辨率的传感器可以提供更高精度的温度测量结果。
在使用非接触式温度传感器进行测量时,需要考虑到如上的因素,以便得到最准确的温度测量结果。
非接触液位传感器原理
非接触液位传感器原理一、绪论非接触液位传感器是一种用于测量液体或其他容器内媒介物位高度的传感器。
与传统的接触式液位传感器相比,非接触液位传感器具有不接触液面、无需触杆、维护容易、使用寿命长等优点,并能适应高温、高压、腐蚀性液体等不同物质的要求。
本文将介绍几种常见的非接触液位传感器原理。
二、毫米波测量原理毫米波液位计是利用毫米波的特性对液面高度进行测量的一种非接触液位传感器。
毫米波的频率范围为30~300GHz,具有高频率、小波长、能穿透一定的障碍物等特点。
当毫米波穿过被测介质时,由于介质对毫米波的折射率不同,会引起反射和散射,并形成回波信号。
毫米波液位计通过接收回波信号的时间差计算液面高度。
毫米波液位计分为FMCW型(调频连续波)和脉冲型两种。
FMCW型可实现高精度、宽测量范围、适应多种介质的要求。
其工作原理是:发射器发射一段稍微倾斜的连续波,在波的一个周期内,发射信号的频率线性增加,形成一个带宽为Δf的调制波。
调制波穿过介质后反射回来,经过接收机接收到回波信号后,计算出液面到天线的距离。
由于液体的介电常数不同,反射信号的相位也不同,可通过计算信号相位差得出液位高度。
脉冲型毫米波液位计则是向液面发射一个极短的脉冲信号,并记录回波信号到达的时间,由此计算液位高度。
其优点是传输功率高、能穿透一定的障碍物,缺点是分辨率相对较差。
脉冲型毫米波液位计适用于测量液面的开放式或封闭式容器,可在高温、高压、腐蚀性液体等环境下使用。
声波液位计是利用声波在介质中传播的速度计算液位高度的一种液位传感器。
它的测量原理是通过向液面发射超声波信号,当超声波穿过介质时,由于介质密度、粘度、温度、压力等因素的影响,会引起超声波传播速度的变化,并产生回波信号。
接收器接收到回波信号后,根据反射时间差计算液面高度。
声波液位计可分为单程传播和来回传播两种。
单程传播方式是一种比较简单的方法,仅需一次发射和接收超声波信号即可测量液面高度。
专论非接触式角度传感器的原理与优点

雪地行驶 防滑控制
! l H 坦乍 州 ,
智 能节 气 门
中 迎 划
0
50
1 00
节 气 门 开度 , %
智 能 电子 节气 门控 制 系统 的多项
控 制 功能
图3
差 分信 号 的概 念
实践 证 明 , 该传 感器 的常 用
动机 0, 一个节气 门多系统共同使用 ,进入
动 机 电 子控 制 系 统 的重 要 信 号 ,
其性 能 的好坏 , 直接 影 响喷 油控
制 !点火 控 制 ! 怠速 控制 ! 加 速 急 控制 ! 断油 控制 和 自动换 挡 控制
等 " 为此 ,非接触式霍尔 (H L )角
度传感器应 了 A
器和节气门位, 传感器的缺点
触式 变阻电位器 ,俗称滑动 电阻 ,它是 用
炭精镀膜电阻或陶瓷薄膜电阻制成的 "
它 的变阻原理 , 是 利用变 阻滑板 随加速
了 该 传 感 器 的 常 发 故 障 区 (在 o r 万 km 内便失准或 失效 ) " 众所 周知 , 节气 门位 置传 感器 (T S ) ! P
了 多功能 ! 能优 化控 制领域 "智能 电子节 智 气 门控 制 系统 (E CT 一 的结 构 ! 作 原 理 S i ) 工 和 多项 控 制 功能 ,过 去 已有人 专 门介 绍 ,在 此 不再 重 复赘 述 , 只用 图例 直 观形 象 予 以 简 要 显 示 5 1 和 图 2 "本 文 专 题讨 论 该 图 )
该 项技 术 "
加速 踏板 位置 传感器
B U S 总线信 号也是如此 " 其好处有 二 ,一
非接触超低功耗红外接近感应技术

非接触超低功耗红外接近感应技术红外接近感应是一种非接触式手势接近滚轴技术,让使用者无需实际触摸,只要利用简单的手势便能操纵,就能使电子装置快速感测到使用者的接近。
该技术也越来越多地应用于多种消费电子设备,如手机,计算机和其他家用电子产品。
但目前市场上大多数的接近$传感器$探测的距离较短,一般为1~10cm,而红外线LED 主要是属于长时间的多脉冲模式发射红外线导致功耗相当大,且造成了很大程度上的浪费。
针对红外接近传感,美国的Silicon Laboratories(简称:Silicon Labs)公司在原来Si1120 的基础上又推出了一款Si1143 的高灵敏红外接近传感器,不但在远距探测和低功耗方面表现出色,同时还增加了SMBus 的通信接口,带三个LED 驱动,在应用上更具灵活性。
一、Silicon Labs 公司的红外接近传感系列Si1143 红外接近传感器包括三个红外LED 驱动器,红外线光电二极管,一个环境光传感器和控制逻辑IC 组成,外部的发射LED 可以根据用户的需要灵活安装和配置。
如图1 所示。
图1工作原理Si1143 自带三个红外LED 驱动,主控MCU 可通过I2C 接口对其进行功能控制,当LED 发射的红外线经过接近物体反射后被内置的红外线光电二极管接收,然后进行模拟数字转换将光强信号转换为数字信号,计算后的数值可与设定的门限值相比较,如果超过设定的门限值则从INT 口输出中断信号给主MCU,通过相应的软件实现具体操作功能。
例如,手机应用程序可能会允许用户在改变手指对手机的距离时实现地图的缩放,或者是拖动地图等功能。
图2 Si1143 的内部框图图3 Si1143 的应用原理图二、Si1143 红外接近传感器的优势在消费产品领域应用中,与Si1120 一样,Si1143 红外接近传感器具备了人们极为关注的两大特点:1. 低功耗不像竞争方案的红外线LED 必须长时间进行多次脉冲以达到精确的测量,Si1143 红外接近传感系列使用专利的单一脉冲接近测量技术(如图4 所示),在电源效率上可达到5000 倍的改善,电池寿命得以延长。
人脸测温门禁终端原理

人脸测温门禁终端原理人脸测温门禁终端是一种集人脸识别和体温检测功能于一体的智能门禁设备。
它的原理是通过红外线测温技术和人脸识别算法,对人脸进行检测和测温,实现快速、准确、非接触式的体温筛查和门禁管理。
人脸测温门禁终端利用红外线测温技术来实现对人体温度的测量。
该技术利用红外线摄像头对人体发出的红外热能进行感应和捕捉,然后通过内部的温度算法,将人体的红外热能转化为实际的体温数值。
相比传统的接触式测温方法,红外线测温技术具有快速、便捷、非接触的优势,可以大大提高体温检测的效率和准确性。
人脸测温门禁终端利用人脸识别算法来实现对人脸的识别和验证。
人脸识别算法是一种基于人脸特征的生物识别技术,通过分析和比对人脸的特征点、轮廓和纹理等信息,来判断身份的真伪。
在人脸测温门禁终端中,通过将用户的人脸信息进行注册和存储,然后与实时采集的人脸图像进行比对,来实现身份认证和门禁控制。
人脸测温门禁终端的工作流程如下:当用户接近门禁终端时,红外线摄像头会自动感应到人体的热能,并进行体温测量。
同时,摄像头会捕捉到用户的人脸图像,并将其送入人脸识别算法进行处理。
算法会提取人脸的特征信息,并与事先注册的人脸模板进行比对。
如果比对结果匹配成功,系统会判断用户的身份合法,并开启门禁,否则将拒绝通行。
此外,系统还可以将测温结果和人脸图像保存下来,用于后续的数据分析和溯源。
人脸测温门禁终端的应用场景非常广泛。
例如,它可以应用于学校、企事业单位、医院、机场、商场等公共场所的门禁管理,可以快速筛查出携带发热症状的人员,防止传染病在人群中的传播。
此外,它还可以应用于工厂、工地等需要严格控制人员进出的场所,可以提高门禁的安全性和管理效率。
人脸测温门禁终端的优势在于其快速、准确、非接触的特点。
相比传统的体温检测方法,它不需要人工干预,可以自动完成测温和识别工作,大大提高了工作效率。
同时,由于是非接触式的测温,可以避免交叉感染的风险,更加安全可靠。
角度传感器的工作原理

角度传感器的工作原理角度传感器是一种用于测量物体角度变化的装置,它在工业、航空航天、汽车等领域都有着广泛的应用。
角度传感器的工作原理涉及到许多物理原理和电子技术,下面我们将详细介绍角度传感器的工作原理。
首先,角度传感器的工作原理可以分为两种类型,接触式和非接触式。
接触式角度传感器通过物理接触来测量物体的角度变化,而非接触式角度传感器则通过无线电波或光学原理来实现测量。
在接触式角度传感器中,常见的原理包括旋转变压器、光栅编码器和霍尔效应传感器;而在非接触式角度传感器中,常见的原理包括激光测距仪、陀螺仪和惯性导航系统。
接下来,让我们来详细介绍一下接触式角度传感器的工作原理。
旋转变压器是一种常见的接触式角度传感器,它通过旋转变压器的旋转角度来改变感应线圈中的感应电压,从而实现角度的测量。
光栅编码器则利用光电传感器和光栅盘之间的光电效应来测量角度变化,它的测量精度较高,常用于需要高精度角度测量的场合。
而霍尔效应传感器则利用霍尔元件对磁场的敏感性来测量角度变化,它具有灵敏度高、寿命长的特点,广泛应用于汽车转向系统、电机控制系统等领域。
而非接触式角度传感器的工作原理则更加复杂。
激光测距仪利用激光束对物体进行扫描,通过测量激光束的反射时间来计算物体的角度变化,它具有测量范围广、精度高的特点,常用于地理测绘、建筑测量等领域。
陀螺仪则利用陀螺效应来测量物体的角度变化,它的测量精度非常高,常用于飞行器、导航系统等领域。
惯性导航系统则通过测量物体的加速度和角速度来实现导航,它具有无需外部参考的特点,广泛应用于航天器、导航系统等领域。
综上所述,角度传感器的工作原理涉及到多种物理原理和电子技术,不同类型的角度传感器具有不同的工作原理和特点。
通过对角度传感器工作原理的深入了解,我们可以更好地选择和应用角度传感器,为各种领域的工程和科研提供更好的支持和保障。
人脸测温门禁终端原理
人脸测温门禁终端原理人脸测温门禁终端是一种结合了人脸识别和体温测量技术的智能门禁设备,其原理是通过使用红外热像仪检测人体体温,结合人脸识别技术进行身份验证,从而实现快速、准确、非接触式的测温和门禁管理。
这种门禁终端的工作原理是通过使用红外热像仪来检测人体体温。
红外热像仪能够感知人体发出的红外辐射,通过对红外图像进行处理,能够准确测量出人体的体温。
在人脸测温门禁终端中,通常会安装多个红外热像仪,以确保对人体体温的准确测量。
当人们接近门禁终端时,红外热像仪会对其进行扫描并测量其体温。
这个过程是非接触式的,不需要人们亲自接触设备,减少了传统测温方法中的交叉感染风险。
通过使用红外热像仪测温,人们只需要站在门禁终端前,红外热像仪就能够快速而准确地测量出其体温。
人脸识别技术也是人脸测温门禁终端的关键技术之一。
在测温过程中,门禁终端会使用摄像头对人脸进行拍摄,并通过人脸识别算法对其进行分析和比对。
通过与预先录入的人脸信息进行比对,门禁终端可以确定人员的身份,并根据设定的门禁规则决定是否允许其进入。
人脸测温门禁终端的工作原理可以分为以下几个步骤:第一步是人脸采集。
当人们接近门禁终端时,摄像头会将其人脸图像进行采集,包括人脸的位置、轮廓、纹理等信息。
这个步骤是通过摄像头和人脸识别算法完成的。
第二步是人脸识别。
门禁终端会将采集到的人脸图像与事先录入的人脸信息进行比对。
通过比对算法,门禁终端可以确定人员的身份,并进行下一步的操作。
第三步是体温测量。
在人脸识别的基础上,门禁终端会使用红外热像仪对人体体温进行测量。
红外热像仪能够感知人体发出的红外辐射,并将其转化为温度值。
通过对红外图像的处理和分析,门禁终端可以准确测量出人体的体温。
第四步是门禁管理。
根据人脸识别的结果和体温测量的结果,门禁终端会根据设定的门禁规则决定是否允许人员进入。
如果人员的身份和体温都符合规定,门禁终端会开启门禁,允许其进入。
如果人员的身份或体温不符合规定,门禁终端会拒绝其进入,并发出相应的警报。
hall传感器
产生不等位电势示意图
补偿方法:
■工艺上采取措施,尽量使霍尔电极对称 ■采用补偿电路
霍尔元件等效电路为一个四臂电桥,因此可在某 一桥臂并上一定电阻将其降到最小,甚至为零。 图为几种不等位电势的补偿电路,其中不对称补 偿简单,而对称补偿温度稳定性好。
霍尔元件符号及等效电路
X
X
(a)不对称补偿
X
X
(b)对称补偿
+
r区
-
H+
H(a)结构
(b)电路符号
磁敏二极管的结构和电路符号
磁敏二极管的工作原理
当磁敏二极管的P区接电源正极,N区接电 源负极,即外加正偏压时,随着磁敏二极 管所受磁场的变化,流过二极管的电流也 在变化,即二极管等效电阻随着磁场的不 同而不同。 为什么磁敏二极管会有这种特性呢? 下 面作一下分析。
磁敏二极管、三极管是继霍耳元 件和磁敏电阻之后迅速发展起来的新 型磁电转换元件。它们具有磁灵敏度 高(磁灵敏度比霍耳元件高数百甚至 数千倍);能识别磁场的极性;体积 小、电路简单等特点,因而正日益得 到重视;并在检测、控制等方面得到 普遍应用。
(1)磁敏二极管 磁敏二极管结构 与普通二极管的区别: 普通二极管PN结的基区很短,以避免 载流子在基区里复合,磁敏二级管的PN 结却有很长的基区,大于载流子的扩散长 度,但基区是由接近本征半导体的高阻材 料构成的。
实验结果显示, 霍尔元件的内阻 随磁场绝对值的 增加而增加,此 现象称为磁阻效 应。
磁阻效应——指霍尔元件的内阻随磁 场的绝对值增加而增加的现象。 磁阻效应产生的本质源于材料中载流子运 动速度具有一定的统计分布。以速度v2运 fE 动的电子,当 FL 时,电子沿直线运动; FL f E fE方 速度为v1﹤ v2的电子, ,电子向 向偏转;速度为v3﹥v2的电子, FL ,电子向 fE FL方向偏转,由此造成控制 电流方向电流密度减小,即由于磁场的存 在增加了元件的内阻。
mems角度传感器的原理

mems角度传感器的原理MEMS角度传感器是一种基于微机电系统(MEMS)技术的传感器,用于测量物体的角度信息。
它通过感知物体的旋转运动,将角度信息转化为电信号输出,从而实现对物体角度的准确测量。
MEMS角度传感器的工作原理基于微机电系统技术,利用微纳加工工艺将机械结构与电子元器件集成在一起,形成微型化的传感器。
其中,MEMS角度传感器的核心部件是微机械结构,通常采用微弹簧或微陀螺仪等结构,用于感知物体的旋转运动。
当物体发生旋转时,微机械结构也会随之转动。
这时,通过微机械结构上的敏感元件(如电容、电阻等)可以测量出结构发生的微小变化。
这些微小变化与旋转角度之间存在一定的关系,通过电路处理可以将微小变化转化为电信号输出。
具体来说,MEMS角度传感器通常采用微电容结构。
当物体旋转时,微机械结构上的两个电极之间的距离会发生微小变化。
这种微小变化会导致电容值发生变化,进而产生相应的电信号。
通过测量电容值的变化,就可以准确地获取物体的旋转角度信息。
为了提高测量的准确性,MEMS角度传感器通常还会配备一些辅助元件,如温度传感器、放大器和滤波器等。
温度传感器用于补偿温度对传感器性能的影响,确保测量结果的稳定性;放大器则用于放大微小的电信号,以提高传感器的灵敏度;滤波器则用于滤除噪声信号,提高测量的精度。
MEMS角度传感器由于其体积小、功耗低、成本较低等优点,被广泛应用于各个领域。
在汽车行业中,它可以用于车辆稳定控制系统、方向盘角度检测等;在航空航天领域,它可以用于飞行器的姿态控制和导航系统;在消费电子产品中,它可以用于智能手机、平板电脑等设备的姿态感知和游戏控制。
MEMS角度传感器是一种基于微机电系统技术的传感器,通过感知物体的旋转运动,将角度信息转化为电信号输出。
它利用微纳加工工艺将机械结构与电子元器件集成在一起,实现了传感器的微型化。
通过测量微小的电容变化,可以准确地获取物体的旋转角度信息。
MEMS角度传感器具有体积小、功耗低、成本较低等优点,被广泛应用于汽车、航空航天、消费电子等领域。
角度声束探头 原理

角度声束探头原理角度声束探头是一种常用于非破坏性材料检测的设备,它通过利用声波的传播特性,对被测材料进行超声波检测,实现对材料缺陷的检测。
这种探头具有高灵敏度、高分辨率、易操作等优点,广泛应用于工业、航空航天、医疗等领域。
角度声束探头的原理是利用一束超声波沿一定的入射角度照射到被测物体表面,从而将超声波引入被检测物体内部,使其在物体内部传播反射、折射、散射等,经过传感器接收、处理,从而确定被检测物体的内部结构、材质以及缺陷等信息。
通过调节探头的角度、频率等参数,可以实现对被测物体不同深度以及不同材质的检测。
角度声束探头的工作原理是超声波检测技术的一种,利用超声波在材料中传播的特性,以及超声波对材料中缺陷的反射、散射和折射的特性,实现对材料中缺陷和内部情况的探测。
在超声波传播方式上,角度声束探头采用斜入射的方式,先将超声波沿着一定的角度照射到被检测材料的表面上,然后通过物体内部的反射、折射而达到探测目的。
角度声束探头的实现过程中需要一些重要的组件:超声波发生器、控制器、超声波探头、电缆等几个部分。
其中超声波发生器是控制超声波的发射和接收;控制器是对超声波发生器进行控制;超声波探头是负责将超声波发射到被检测物体表面;电缆是将超声波发生器和超声波探头连接起来。
这种探头的工作原理是基于物体的声学特性,通常使用的是高频电子脉冲来产生超声波,在超声波发生之后,超声波将以特定的方式传播穿过被测物体。
当超声波遇到物体表面时,一部分波将被反射回来,另一部分波将进入物体并穿过物体。
这些穿过物体的波将会反射在物体内部的加强点,也称吸收点上。
由于透射和反射声波的形成,触头可以类比成一架喇叭,它将声波能量集中并传播到要检查的地方,从而实现对物体的核心区域进行检测。
与传统的超声波探测不同,角度声束探头的重点在于其角度的调节,这能够帮助仪器探测到更深的材料缺陷。
角度声束探头的优点是它能够探测到物体的更深处,从而帮助工程师更好地检测到物体中的缺陷和问题。
非接触式测量

非接触式测量非接触式测量的定义非接触测量是一种基于光电、电磁等技术,在不接触被测物体表面的情况下获取物体表面参数信息的测量方法。
典型的非接触测量方法,如激光三角测量、涡流测量、超声波测量、机器视觉测量等。
概况V-STARS(视频模拟三角测量和响应系统)是GSI公司开发的工业数字近景摄影测量坐标测量系统。
该系统主要具有三维测量精度高(相对精度高达1/200000)、测量速度快、自动化程度高、工作环境恶劣(如热真空)等优点。
它是世界上最成熟的商业工业数字摄影测量产品。
该系统是基于数字摄影的大尺寸三坐标测量系统,也称为工业摄影测量系统(industrialphotogrammetrysystem)、数字近景摄影测量系统、数字近景摄影视觉测量系统、数字摄影三维测量系统、三维光学图像测量系统(3dindustrialmeasurementsystem)。
它通过V-STARS软件(如图3所示)处理收集的照片,以获得待测点的三维坐标。
这些照片是通过使用高精度专业相机(如美国GSI公司的inca3相机)在不同位置和方向拍摄同一物体而获得的。
V-STARS软件会自动处理这些照片,通过图像匹配等处理和相关数学计算,得到被测点的精确三维坐标。
一旦被处理,被测物体的三维数据将进入坐标系,就像之前被测量或处理过一样。
如有必要,V-STARS软件还内置了分析工具,可以输出三维数据。
这些被测物体通常提前手动粘贴回光反射标记,或通过投影仪投射到点上,或投射到检测杆上。
技术特点(1)高精度:单摄像机系统的测量精度在10米以内可达0.08mm,双摄像机系统的测量精度可达0.17mm;(2)非接触测量:光学摄影的测量方式,无需接触工件;(3)测量速度快:单台摄像机可在几分钟内完成大量点云测量,双摄像机可实时测量;(4)可在不稳定环境(温度、振动)下测量:测量时间短,温度影响小。
双摄像机系统可以在不稳定的环境中进行测量;(5)特别适合狭小空间的测量:只要0.5m空间即可拍照、测量;(6)数据率高,便于获取大量数据:图像点由计算机软件自动提取和测量,测量1000个点的速度几乎与10个点的速度相同;(7)适应性好:被测物尺寸从0.5m到100m均可用一套系统进行测量;(8)便携性好:单相机系统1人即可携带到现场或外地开展测量工作。
同轴回归反射型传感器原理

同轴回归反射型传感器原理
同轴回归反射型传感器是一种非接触式测量方式,用于测量成型件的表面轮廓。
本传
感器的主要原理是利用光的反射来检测物体的形态,并将反射信号转化为数字信号进行处理。
该传感器的优点是精度高、测量速度快、适应性强,可以广泛应用于数控加工、自动
化生产线和机器人控制等领域。
同轴回归反射型传感器的原理是利用传感器的光电传感器和激光发射器,通过测量反
射的光强来确定测量物体的位置和形态。
该传感器主要包括光源、光透镜、检测器、信号
处理器和输出接口等部分。
同轴回归反射型传感器的光源通常采用激光或LED灯,光线经过透镜后聚焦在物体表
面上,反射回来的光线通过同样的透镜被聚焦到检测器上。
因此,传感器通过测量反射回
来的光线强度,确定物体的高度、宽度、深度等形态信息。
在传感器的检测过程中,光线的散射和折射会对测量结果产生影响,为了避免这种干扰,可以采用同轴设计。
传感器的激光源和检测器通过同一光轴来识别物体的轮廓,这使
得激光和检测器在物体表面上交叉时产生的干扰最小化。
同轴回归反射型传感器的信号处理器接收检测器测量的光强信号,并将其转换为数字
信号进行处理。
传感器对光强信号进行比较和分析,从而确定被测物体的轮廓和形态信息。
这种测量方式可以实现百纳米级别的精度,具有非常高的可靠性和稳定性。
总体来说,同轴回归反射型传感器是一种非常先进的测量工具,其原理和应用都十分
广泛。
其主要优点是在物体表面没有任何残留物时能维持精度,测量速度快,难以被干扰,适度范围广,灵活性强,可以应用于具有不同形状和尺寸的物体的测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
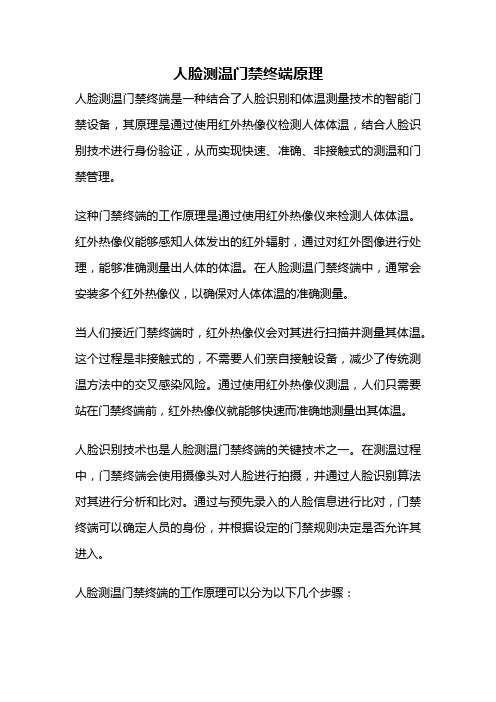
特点:• 体积小巧• 满足极端环境应用• 轴端受力达300 N• 非接触式磁感应测量技术• 工作量程可达 360°• 可选单路或冗余输出• 加强型防腐蚀保护• 阳极氧化铝外壳,不锈钢 轴,耐盐雾侵蚀• 线性优异• 分辨率12 位• IP6k9k 防水性能优异• 耐高温• 即使在振动环境下,寿命 仍 >100 x106次运动• 满足PLd, ISO 13849,应 用于安全相关的系统中• 通过欧洲E1认证RSX 系列角度传感器全金属外壳和不锈钢转轴、双球铰轴承以及全密封顶盖,精度高,可靠性强,满足恶劣环境下移动机械设备的角度测量需要并能长期可靠工作。
特别适合大型移动车辆应用,尤其对安全性能有要求的行业应用。
厚重、紧凑的设计结构允许该传感器和被测物体的轴连接方式采用同样厚重的水平摆臂直接连接或采用其他方式连接。
主要的应用场合:对电液控制转向角度进行测量。
安装对中采用突起的法兰,外径58 mm ,如果悬挂安装,则端盖的对中安装外径对应为16 mm 。
RSX-7900系列角度传感器NOVOHALL 原理,非接触式产品应用• 齿轮系统的位置测量• 移动车辆支撑系统• 平板车(多轴)运梁、大件运输车等•建筑和农业机械说 明外 壳阳极氧化铝,抗盐腐蚀轴不锈钢 (1.4305)轴 承坚固双轴承电气连接电缆输出与PG 螺纹M12接头顶盖端对中安装规格RSX-791_-_ _ _-_ _ _-_ _ _轴侧对中安装规格RSX-794_-_ _ _-_ _ _-_ _ _X = 轴标点引导槽孔径当轴标点指向引导槽时,传感器位于电气中心位置。
单路输出版本电缆(编码 -252)M12接头(编码 -551)工作电源# 1针脚1电源地# 2针脚3信号# 3针脚2未定义# 4 GN/GE针脚4部分冗余输出版本电缆(编码 -252)M12接头(编码 -551)Supply # 1针脚1GND # 2针脚3Signal 1# 3针脚2Signal 2# 4针脚4Not assignedGN/GE-完全冗余输出版本2 x 电缆 (编码 -352)2 x M12 接头(编码 -651)工作电源 1通道1 / # 1通道1 / 针脚1电源地 1通道1 / # 2通道1 / 针脚3信号 1通道1 / # 3通道1 / 针脚2工作电源 2通道2 / # 1通道2 / 针脚1电源地 2通道2 / # 2通道2 / 针脚3信号 2通道2 / # 4通道2 / 针脚4未定义通道1 / # 4通道1 / GN/GE 通道2 / # 3通道2 / GN/GE通道1 / 针脚4通道2 / 针脚2接头针脚定义接脚定义RSX-79_1- _ _ _ - _ _ _ - _ _ _ RSX-79_3- _ _ _ - _ _ _ - _ _ _定制轴规格RSX-79_5- _ _ _ - _ _ _ - _ _ _RSX-79_7- _ _ _ - _ _ _ - _ _ _电气连接方式部分冗余输出 完全冗余输出RSX-79_ _- _ _ _ - _ _ _ - 25_ RSX-79_ _- _ _ _ - _ _ _ - 35_通道1 通道2RSX-79_ _- _ _ _ - _ _ _ - 5_1RSX-79_ _- _ _ _ - _ _ _ - 6_1通道1 通道2技术参数机械参数尺寸见尺寸图安装带4个M6螺栓,拧紧深度至少15 mm安装螺丝的初始扭力矩8 ±1Nm 机械行程360 连续°允许(轴向/径向)静态或动态轴荷载300 (轴向), 300 (径向)N扭力矩 *最大4Ncm 最大转速50min-1重量约 500g电气参数工作电压 Ub12/24 (9 ... 34)VDC 空载时电流功耗通常 20mA 接反电压保护有短路保护有,所有信号相对地和供电电压工作量程范围60, 120, 180, 240, 300, 360°通道数量 1 / 2刷新率5kHz 分辨率12bit 可重复性0.2°角度滞后0.1°绝对线性(工作量程 < 90º时)绝对线性(工作量程 > 90º时)2.01.0±%FS±%FS内部线性(工作量程 < 90º时)内部线性(工作量程 > 90º时)4.02.0±%FS±%FS输出信号 4 ... 20(最大负载250 Ω)mA工作量程< 90º时因温度引起的输出误差工作量程> 90º时因温度引起的输出误差200160ppm/Kppm/K绝缘阻抗 (500 VDC)≥ 10MΩ电缆截面积AWG 20,0.5mm²环境参数工作温度范围 -40 ... +85ºC抗振动指标 (IEC 60068-2-6) 5 (2000)Amax = 0.75amax = 20Hz mm g抗冲击指标 (IEC 60068-2-27)50 (6 ms)g 防护等级 (DIN EN 60529) IP67 (带接头时)IP6k9k(直出电缆时)寿命>100x106次满足EMC标准ISO TR 10605 Packaging and Handling + Component Test (ESD) 8 kV, 15 kVISO 11452-2 Radiated EM HF-Fields, Absorber Hall:100 V/mISO 11452-5 Radiated EM HF-Fields, Stripline 200 V/mCISPR 25 Radiated and conducted emission class 5ISO 7637-2/3 Transient disturbance emission level 3Interference emission and immunity according to ECE-R10 (E1)功能安全性要求在客户认可的情况下,可提供冗余输出产品,满足 PLd ISO 13849标准。
MTTF (DIN EN ISO 13849-1,无负载情况下抽样) MTTFd (DIN EN ISO 13849-1无负载情况下抽样)46(每通道)92(每通道)年年*) 由于环境温度、静止时间等因素,扭启动轴的作用力会增加。
订购规格说明工作电压Ub / 接口3:Ub = 12/24 V (9 ... 34 V)电气连接单路输出/ 部分冗余输出版本:1个输出252:1根4芯电缆,长2 m ,不带屏蔽551:1个4针M12接头,不带屏蔽完全冗余输出版本:2个输出352:2根4芯电缆,长2 m ,不带屏蔽651:2个4针M12接头,不带屏蔽可定制其他长度的电缆和安装接头输出特性 1:上升,顺时针转 2:上升,逆时针转3:部分冗余输出版本:两路交叉信号输出,输出1上升/输出2下降顺时针转4:完全冗余输出版本:两路交叉信号输出,输出1上升/输出2下降顺时针转可定制其他输出特性输出信号 2:4 mA ... 20 mA系列型号 / 尺寸79:79 x 35 mm轴1:不锈钢Ø 13x12 mm ,孔径Ø 4.1 mm 3:不锈钢Ø 10x16 mm ,孔径Ø 4.5 x 90º可定制其他轴尺寸外壳1:阳极氧化铝,轴侧对中安装4:阳极氧化铝,顶盖端对中安装通道数量6:单路输出 (1 x Ub, 1 x 输出)7:部分冗余输出 (1 x Ub, 2 x 输出)8:完全冗余输出 (2 x Ub, 2 x 输出)工作量程06: 60°12: 120°18: 180°24: 240°30: 300°36: 360°可定制其他角度量程订购规格说明加粗文字为常规规格,对此类规格:• 订购数量大于25时,交期只需10个工作日• 不收取附加费非常规规格按不同数量收取附加费。
–––R 236381197X S 4–532Z-IPX-M01水平摆臂,165 x 20 mm • 铝• 配套 RSX-79_1-...• 产品编号:056501发货时包含配套螺丝和插销可选安装辅件Z-IPX-M11水平摆臂,185 x 20 mm ,用于水平驱动• 铝• 配套RSX-79_1-...• 产品编号:056502发货时包含配套螺丝和插销Z-IPX-M31安装法兰托盘,可调节安装孔径 100 mm • 阳极氧化铝• 产品编号:056504发货时包含4个配套暗钉和插销铝质水平摆臂Z-IPX-M01,165 x 20 mm铝质水平摆臂 Z-IPX-M11,185 x 20 mm铝质安装法兰托盘Z-IPX-M31如有更改,恕不另行通知。
可选辅件- RSX7900系列配套M12系列接头© 12/20154针M12x1 凹直接头,A 型,带配套安装螺母和拧紧端, IP67, 不带屏蔽外壳材质PBT 塑料-25ºC ... +90ºC 接 线 端 6 ... 8mm最大 0.75mm²型 号产品编号EEM 33-88005633针脚定义4针M12x1 凹直接头,A 型,IP67带塑包电缆,不带屏蔽,线端裸露外壳材质PA 塑料电缆规格PUR ;Ø = max. 6mm -40ºC ... +85ºC (固定状态)导 线PP ,0.34mm²电缆长度型号产品编号2 m EEM 33-350561355 m EEM 33-3605613610 mEEM 33-370561371 = 棕色2 = 白色3 = 蓝色4 =黑色针脚定义。