蜘蛛机器人实训PPT课件
机器人基础知识的培训PPT共10

contents •机器人概述与发展历程•机器人核心技术解析•机器人应用领域探讨•机器人伦理与法律问题思考•机器人创新实践案例分析•总结与展望目录机器人定义及分类定义分类发展历程及现状发展历程现状未来趋势与挑战未来趋势随着人工智能、大数据、云计算等技术的不断发展,机器人将更加智能化、自主化、协同化。
未来机器人将具备更强的感知能力、决策能力和执行能力,能够更好地适应复杂环境和任务需求。
挑战机器人技术的发展也面临着一些挑战,如技术瓶颈、安全隐患、伦理问题等。
同时,机器人的广泛应用也会对就业市场和社会稳定产生一定影响,需要加强相关法规和规范的建设。
内部传感器外部传感器传感器融合技术030201传感器技术控制技术开环控制闭环控制控制算法人工智能技术通过训练数据自动学习规律和模式,实现自主决策和智能行为。
利用神经网络模型学习高层抽象特征,实现更复杂的智能任务。
让机器人理解和处理人类语言,实现人机交互和智能问答等功能。
让机器人能够识别和理解图像和视频信息,实现环境感知和物体识别等功能。
机器学习深度学习自然语言处理计算机视觉工业制造领域应用01020304自动化生产线焊接、切割与喷涂物料搬运检测与质量控制手术协助操作康复训练护理服务医疗咨询医疗健康领域应用智能家居领域应用家务助手娱乐陪伴安全监控智能控制伦理道德问题机器人是否具有道德地位探讨机器人是否应该被视为道德主体,以及是否具有权利和义务。
机器人行为准则制定机器人行为准则,以确保其行为符合社会道德标准,避免对人类社会造成危害。
机器人与人类关系探讨机器人与人类之间的伦理关系,如机器人是否应该尊重人类生命、尊严和价值观等。
法律法规问题机器人法律地位01机器人监管制度02数据安全与隐私保护03社会责任问题机器人对就业市场的影响机器人对环境的影响普及机器人教育创新实践案例一:协作型机器人设计设计背景随着工业自动化的发展,协作型机器人已成为生产线上的得力助手。
设计目标实现机器人与人类在生产过程中的高效、安全协作。
机器人课程PPT课件

•
医疗方面发挥作用。
43
微型飞行器:被认为是未来战场上的重要侦察和攻击武器,能以可接受的成本执行某一有价值的任务。这种飞行器必须能够传输实时图像或执行其它功能,有足够小的尺寸(小于20厘米)、足够的巡航范围(如不小于5公里)和飞行时间(不小于15分钟)。
微型战术无人机:可用于战争危险估计、目标搜索、通信中继,监测化学、核或 生物武器,侦察建筑物内部情况。可适 用于城市、丛林等多种战争环境。因为 其便于携带,操作简单,安全性好的优
62
•
应用领域的进一步扩大
机器人在制造业中的发展是成功的,正逐步涉足非制造业。随着人类改造大自然要求的提高,以及机器人适应特殊环境能力的增强,农业、林 业、军事、海洋勘探、太空探索、生物医学工程 等行业将是机器人崭露头角的新领域。深入日常生活在人们的日常生活中,各种服务机器人也将向我们走来,娱乐机器人将给我们的生活增添无限乐趣。清洁机器人将减轻我们繁重的家务。保健机器人可为老人和残疾人提供保健帮助,是人
10
即分为示教-存储-再现-操作四
•
示教-再现步进行。
示教:方式有两种:(1) 直接示教-手把手;(2) 间接示教-示教盒控制。存储:保存示教信息。再现:根据需要,读出存储的示教信息向机器人发出重复动作的命令。
7.12.13 控制
顺序信息:各种动作单元(包括机械手和外围设备)按动作先后顺序的设定、检测等。位置信息:作业之间各点的坐标值,包括手爪在该点上的姿态,通常总称为位姿( POSE)。时间信息:各顺序动作所需时间,即机器人完成各个动作的速度。
•
执4 行机构:机器人的足、腿、手、臂、腰及关节等,它是机器人运动和完成某项任务所必不可少的组成部分。
5 控制器:是机器人的核心,它负责对机器人的运动和各种动作控制及对环境的识别。现代工业机器人的控制器都是由计算机控制系统组成,控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。
2024年度-机器人教学课件(共26张PPT)pptx

介绍了机器人常用传感器类型、 工作原理及在机器人感知中的应 用。
机器人自主导航与定位
阐述了机器人自主导航的基本原 理、定位方法及SLAM技术。
机器人基本概念与分类
机器人操作系统与编程
介绍了机器人的定义、发展历程 、分类及应用领域。
介绍了ROS的基本概念、功能特 点、常用命令及编程实践。
32
学生自我评价报告分享
第三代机器人
智能型机器人,具备自主 学习和决策能力,能够适 应复杂环境和任务。
5
未来趋势展望
人机协作
随着人工智能技术的发展,未来 机器人将更加注重与人类的协作 ,共同完成任务。
应用领域拓展
随着技术进步和应用需求增加, 机器人将在更多领域得到应用, 如医疗、教育、娱乐等。
自主化
机器人将具备更高的自主性和智 能化水平,能够独立完成复杂任 务。
以促进课程的不断完善和提高。
33
下一步学习计划和资源推荐
深入学习机器人相关领域知识
鼓励学生继续深入学习机器人相关领域知识,如机器视觉、深度学习在机器人中的应用等 。
参加机器人竞赛和项目实践
推荐学生参加各类机器人竞赛和项目实践,锻炼自己的实践能力和团队协作能力。
利用在线资源进行自主学习
推荐学生利用MOOCs、在线实验室等资源进行自主学习和实践操作,提高自己的学习效 果和兴趣。
01
学习成果展示
通过课程学习,学生能够掌握机器人基本概念、运动学与控制、传感器
与感知、自主导航与定位等关键知识点,并具备一定的实践操作能力。
02
学习方法分享
学生可以采用多种学习方法,如课前预习、课后复习、小组讨论、实践
操作等,以提高学习效果和兴趣。
蜘蛛机器人实训

实战案例分享与解析
案例一
蜘蛛机器人在地震灾区的应用
案例二
蜘蛛机器人在石油化工行业的应用
案例三
蜘蛛机器人在电力行业的应用
学生实战应用与展示
学生团队展示
学生们可以组成团队,设计和制作自己的蜘蛛机器人,并通过比赛和展示活动向其他团队和观众展示自己的成 果。
创新应用展示
学生们可以通过创新应用展示,展示自己如何在不同的领域中使用蜘蛛机器人,如环境监测、安全巡检、农业 等。
调试技巧
使用调试工具,如断点、日志等,定位问 题并解决。
内存管理
合理分配和释放内存,避免内存泄漏和溢 出。
性能优化
通过优化算法、减少冗余计算等方式,提 高程序的运行效率。
代码重构
对程序进行重构,使代码更加清晰、易于 维护和扩展。
05
蜘蛛机器人实战应用
机器人应用场景与优势
复杂环境适应能力
高效率
蜘蛛机器人能够在复杂的环境中工作,如狭 窄通道、高低不平的地面、障碍物等。
感谢您的观看
THANKS
蜘蛛机器人可以快速地爬行和移动,能够在 有限的时间内覆盖更大的区域,提高工作效 率。
实时监测与控制
节省人力
蜘蛛机器人可以携带传感器,实时监测环境 数据,并将数据传输给操作员,以便操作员 根据数据做出决策。
蜘蛛机器人的使用可以减少人力需求,减轻 工作人员的负担,特别是在危险的环境中, 可以避免人员受伤。
实训内容
蜘蛛机器人的基本结构和工作 原理
蜘蛛机器人的各种传感器及其 使用方法
蜘蛛机器人的运动控制和路径 规划算法
蜘蛛机器人在实际应用中的案 例分析和实践操作
实训时间与地点
时间
2022年6月1日至2022年6月10日,共10天
六足昆虫机器人中级PPT课件

搭建结构分析:六只脚都能动起来,并且 要像真的昆虫爬行一样。六只脚交错运动, 用到齿轮的带动连杆的交错连接
程序编写
当颜色传感器作为尾巴,感应红色启动一 直发出叫声,行走遇到障碍物停止,后退 一段距离,转向。触动传感器控制关闭整 个程序。
想一想如何让小车执行动作的同时显示 图片
1.完善六足机器人,使其更加像真的昆虫 一样行 走。 2.装饰美化我们的机器人
ห้องสมุดไป่ตู้
向爸爸妈妈做个展示吧!他们或许 有更好的主意喔!
六足机器人
教学目标 1、触动传感器、颜色传感器作为开关的使用。 2、超声波传感器的使用。 3、无轮行走结构(齿轮连杆带动)的设计搭建。 难点 1、齿轮、连杆带动行走的搭建。 2、循环终止程序的编写。 3、颜色传感器作为开关的编写。 时间安排 本次项目为两个课时,时长90分钟。
哪些昆虫有六只脚?是怎样爬行或行走的?
EV3 中级课程《蜘蛛机器人》活动课件
《蜘蛛》教案
提出任务一:建构:采用连杆结构以及齿轮结构搭建蜘蛛机器人模型。
程序:能够理解变量模块、常量模块、电机旋转模块的基本用法以及中型电机操控蜘蛛机器人的运动方向以及速度大小,动作包括:前进、后退转向等动作。
一、分析蜘蛛模型结构并引导学生动手搭建。
1.分析蜘蛛模型结构。
动力系统头胸部、腹部。
(核心为基础进行搭建)
腿部(连杆、齿轮)。
2. 搭建蜘蛛整体、动力系统。
1)将两个大型电机固定安装2)将核心固定在两个大型电机上面。
3.搭建腿部。
1)齿轮规律,单数齿轮转向相反2)连杆结构安装时第一个齿轮与最后一个齿轮上的点保持一致
4.搭建手柄。
1)利用一个大型电机与一个触碰传感器搭建手柄2)手柄造型自主设计
5.编程
1)能够理解变量模块、常量模块、电机旋转模块以及数学模块的基本用法。
电机旋转模块:测量电机旋转度数
变量模块:储存变化的量
常量模块:设置一个不变的量
数学模块:进行数据处理
2)操作手柄操控蜘蛛机器人的运动方向以及速度大小。
主程序为并行程序:
1端口呢触碰传感器控制A电机角度重置以及将0写入转向
结构反思并完成整体作品建构。
一、结构反思
1.师:说一说你搭建的蜘蛛模型包含哪几部分结构?
答:头胸部、腹部,腿部,手柄。
2.师:蜘蛛模型是如何实现在运动的?
答:齿轮传动规律(单数齿轮为同向,双数齿轮为异向),以及连杆结构。
二、引导学员完善、调整自己作品的整体建构。
机器人基础知识培训ppt课件精选全文完整版
第一代:示教再现型机器人 该种机器人没有装备任何传感器,对环境无感知能力,智能按照人类编写的 固化程序工作。世界上第一台机器人即属此类。
第二代:感觉型机器人 此种机器人拥有简单的传感器,可以感知外部参数变化,有部分适应外部环 境的能力。即可以根据外部环境的不同改变工作内容。
2.虚实结合 机器人不是孤立的,通过大量仿真、虚拟现实,把虚拟现实与车间实际 加工过程有机结合起来。
3.人机融合 人、机器和机器人如何有机融合?这值得业界深入思考。
10
机器人三大原则
第一条:机器人不得危害人类。此外,不可因 为疏忽危险的存在而使人类受害。
第二条:机器人必须服从人类的命令,但命令 违反第一条内容时,则不在此限。
17
18
竞赛机器人
目前最大型的机器人竞赛是机器人世界杯。机器人世界 杯(RoboCup)是一个国际合作项目,为促进人工智能、 机器人和相关领域。它为人工智能机器人研究提供了广 泛的技术标准问题,能够被综合和检验。该机器人项目 的最终目标是到2050年,开发完全自主仿人机器人队, 能赢得对人类足球世界冠军队。为了真正作为一个团队 进行机器人足球比赛,必须包含各种技术,包括:智能 体自主设计、多智能体协作、策略获娶实时推理、机器 人和传感器融合。
第三代:智能机器人 这种智能机器人可以认识周围环境和自身状态,并能进行分析和判断,然后 采取相应的策略完成任务。目前这种机器人大部分还是用于军事领域。
8
机器人发展的三大趋势
1、软硬结合 2、虚实结合 3、人机融合
9
1.软硬融合 机器人软件更重要,因为人工智能技术体现在软件上,数字化车间的轨 迹规划、车间布局、自动化上料都需要软硬件相结合,只开发硬件还不 够,还需要大量的软件开发人员。因此,现在做智能制造,既要懂机械, 又要懂信息技术,尤其是机器人的控制技术。
蜘蛛机器人
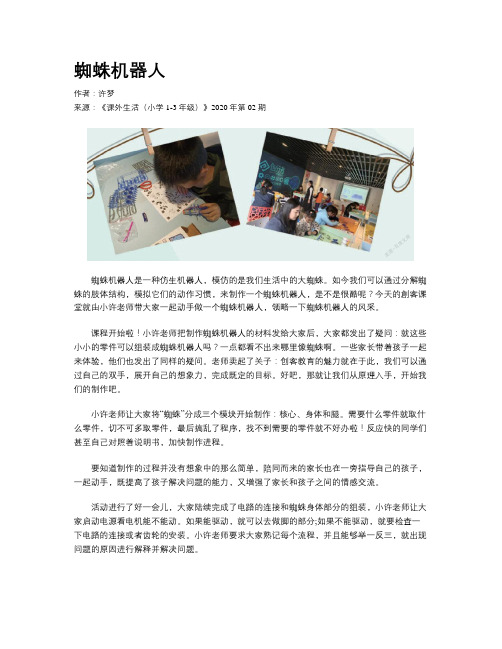
蜘蛛机器人作者:许梦来源:《课外生活(小学1-3年级)》2020年第02期蜘蛛机器人是一种仿生机器人,模仿的是我们生活中的大蜘蛛。
如今我们可以通过分解蜘蛛的肢体结构,模拟它们的动作习惯,来制作一个蜘蛛机器人,是不是很酷呢?今天的創客课堂就由小许老师带大家一起动手做一个蜘蛛机器人,领略一下蜘蛛机器人的风采。
课程开始啦!小许老师把制作蜘蛛机器人的材料发给大家后,大家都发出了疑问:就这些小小的零件可以组装成蜘蛛机器人吗?一点都看不出来哪里像蜘蛛啊。
一些家长带着孩子一起来体验,他们也发出了同样的疑问。
老师卖起了关子:创客教育的魅力就在于此,我们可以通过自己的双手,展开自己的想象力,完成既定的目标。
好吧,那就让我们从原理入手,开始我们的制作吧。
小许老师让大家将“蜘蛛”分成三个模块开始制作:核心、身体和腿。
需要什么零件就取什么零件,切不可多取零件,最后搞乱了程序,找不到需要的零件就不好办啦!反应快的同学们甚至自己对照着说明书,加快制作进程。
要知道制作的过程并没有想象中的那么简单,陪同而来的家长也在一旁指导自己的孩子,一起动手,既提高了孩子解决问题的能力,又增强了家长和孩子之间的情感交流。
活动进行了好一会儿,大家陆续完成了电路的连接和蜘蛛身体部分的组装,小许老师让大家启动电源看电机能不能动。
如果能驱动,就可以去做脚的部分;如果不能驱动,就要检查一下电路的连接或者齿轮的安装。
小许老师要求大家熟记每个流程,并且能够举一反三,就出现问题的原因进行解释并解决问题。
孩子们在老师和家长的引导下,顺利地完成了上述操作。
最后一步是安装蜘蛛的脚,小许老师告诉大家:“现实生活中不知道大家有没有细心观察,蜘蛛一般都是八条腿,那我们的蜘蛛机器人也要有八条腿哦。
大家组装好所有的腿,安装好固定支架后,蜘蛛机器人就算完成了,大家加油哦。
”同学们有的来不及回应老师,埋头制作着;有的举手询问老师,提出疑问,希望老师帮助解决。
不一会儿,大家的蜘蛛机器人都完成了,打开开关,蜘蛛机器人竟然真的能够爬行。
蜘蛛机器人实训

CON1 CON2 CON3 CON4 CON5 CON6 CON7 CON8 CON9
+5V GND +5V
GND
GND RG5
1 2
GND
GND
R8 +5V 20K
ADC4 GND
传感器输入
12M XT AL2 C5 22P SW1 GND J19 2 1 VCCIN C1 470uF C2 104 IN
环境光 方向 控制器 前 进 阻 力 方向 控制 信号 舵 机 机械机构 实际 方向
光敏传感器
障碍物传感器
六足救援机器人多输入多输出控制系统框图 汕头职业技术学院
三、控制系统设计
1、六足蜘蛛救援机器人控制系统总体设计
– MCU的选择。本系统采用AVR单片机 “ATMEGA16”作为核心控制,其优点为: ① I/O口可设为推挽输出,输出电流大。 ② 大多数指令都是单时钟指令,运算速度快。 ③ 片内集成A/D转换功能,便于光信号的多级度 取样。 ④ 定时器可以工作在CTC模式,可以立即更新 数据,便于产生多路PWM信号。
汕头职业技术学院
二、机械系统及动力设计
3、初定机器人脚部关节长度
舵机的转矩
由两个 因素确定
机器人身躯的 离地高度
选定每只脚的长度为100mm左右
汕头职业技术学院
二、机械系统及动力设计 4、舵机的选定
转矩则必须计算出其舵 机驱动关节的重量以及 力臂。 计算出每只脚的重量; 计算每只脚的力臂:使用AutoCAD2010绘制出脚 部实体图,并使用该软件的“MASSPROP”可求出各 零件的重心。最后用作图法求出脚的重心,从而求出其 力臂,约为90mm,根据力对轴之矩的公式可求出其力 矩;选用辉盛 MG945 180度舵机。
蜘蛛型机器人课程设计

蜘蛛型机器人课程设计一、课程目标知识目标:1. 学生能理解蜘蛛型机器人的基本构造和原理,掌握其运动方式和控制方法。
2. 学生能了解蜘蛛型机器人在实际应用中的优势和局限性,并对其未来发展有一定认识。
技能目标:1. 学生能够运用所学知识,设计并搭建一个简单的蜘蛛型机器人模型。
2. 学生能够编写程序,实现对蜘蛛型机器人的基本控制,如直线行走、转弯等。
3. 学生能够运用团队协作和问题解决的能力,对蜘蛛型机器人进行调试和优化。
情感态度价值观目标:1. 学生对蜘蛛型机器人及其相关技术产生兴趣,培养科技创新意识。
2. 学生在团队合作中学会相互尊重、沟通与协作,培养团队精神和责任感。
3. 学生能够关注蜘蛛型机器人在社会生活中的应用,认识到科技对人类生活的影响,提高社会责任感。
课程性质:本课程为实践性较强的课程,结合理论知识与动手操作,培养学生创新思维和实际操作能力。
学生特点:六年级学生具备一定的观察、分析和动手能力,对新鲜事物充满好奇心,喜欢挑战性任务。
教学要求:教师应注重理论与实践相结合,引导学生主动探究,鼓励学生动手实践,关注学生个体差异,提供有针对性的指导。
通过本课程的学习,使学生能够达到上述课程目标,为后续学习打下坚实基础。
二、教学内容1. 机器人基础知识:介绍蜘蛛型机器人的基本构造、原理及其特点,关联课本第二章“机器人概述”。
- 机器人发展历程- 机器人基本构造与功能- 蜘蛛型机器人原理及优势2. 蜘蛛型机器人结构与设计:学习蜘蛛型机器人的结构设计,关联课本第三章“机器人结构与设计”。
- 蜘蛛型机器人的机械结构- 关节及传动系统设计- 整体布局与重量分配3. 控制系统与编程:掌握蜘蛛型机器人的控制方法,关联课本第四章“机器人控制技术”。
- 控制系统原理- 编程基础与逻辑控制- 蜘蛛型机器人控制实例4. 动手实践与调试优化:实践操作,关联课本第五章“机器人实践与应用”。
- 搭建蜘蛛型机器人模型- 编写控制程序- 调试与性能优化5. 蜘蛛型机器人在实际应用中的案例分析:了解蜘蛛型机器人的应用场景,关联课本第六章“机器人应用案例分析”。
机器人ppt(共21张PPT)
后果十分严重。瓦斯和冲击地压在形成突发事 故之前都会表现出种种迹象,如岩石破裂等。 采用带有专用新型传感器的移动式机器人连 续监视采矿状态,可以及早发现突发事故的 先兆,采取相应的预防措施。
此外,在食品工业、核工业等行业中也已 经开始广泛使用机器人来代替一些手工作业。
机器人
(a) 搬运机器人;(b) 涂料机器人;(c) 焊接机器人
工业机器人的组成 工业机器人一般由执行机构、控制系统、
驱动系统以及位置检测机构等几个局部组成。
工业机器人的分类
这种机器人可以利用传感器来确定巷道的上缘,这样就可以自动瞄准巷道缝,然后把钻头按规定的间隔布置好,钻孔过程用微机控制,
(2) 通用机器人:
具有独立控制系统,通过改变控制程序能完 成多种作业的机器人。其结构复杂,工作范 围大,定位精度高,通用性强,适用于不断 变换生产品种的柔性示教操作后,能
按示教的顺序、位置、条件与其他信息反复 重现示教作业。 ▪ (4) 智能机器人: ▪ 采用计算机控制,具有视觉、听觉、触觉等 多种感觉功能和识别功能机器人,通过比较 和识别,能自主作出决策和规划,自动进行 信息反响,完成预定的动作。
送给操作人员。 (2) 凿岩机器人。这种机器人可以利用传感器 来确定巷道的上缘,这样就可以自动瞄准巷 道缝,然后把钻头按规定的间隔布置好,钻 孔过程用微机控制,随时根据岩石硬度调整 钻头的转速、力的大小以及钻孔的形状,这 样可以大大提高生产率,人只要在平安的地 方监视整个作业过程就行了。
(3) 井下喷浆机器人。井下喷浆作业是一项繁 重且危害人体健康的作业,目前这种作业主 要由人操作机械装置来完成,缺陷很多。采 用喷浆机器人不仅可以提高喷涂质量,也可 以将人从恶劣和繁重的作业环境中解放出来。 (4) 瓦斯、地压检测机器人。瓦斯和冲击地压 是井下作业中的两个不平安的自然因素,一 旦发生突然事故,那么相当危险,
2024版幼儿园大班科学《机器人》PPT课件
幼儿园大班科学《机器人》PPT课件目录CONTENCT •机器人概述•机器人结构与工作原理•机器人技术应用领域•幼儿园教育中机器人技术应用•孩子们如何学习制作简易机器人•总结与展望01机器人概述定义与发展历程定义机器人是一种能够自动执行任务的机器系统。
它们可以通过传感器感知环境,并通过控制器进行决策和行动。
发展历程机器人的发展经历了从简单到复杂、从单一到多样的过程。
早期的机器人主要用于工业生产线上,执行重复性的劳动任务。
随着技术的进步,机器人逐渐具备了更多的智能和自主能力,可以应用于更广泛的领域。
种类与功能特点种类根据应用领域和功能特点,机器人可以分为工业机器人、服务机器人、特种机器人等。
工业机器人主要用于生产线上的自动化生产,服务机器人则用于提供各种服务,如家政、医疗、教育等。
特种机器人则针对特定环境和任务进行设计,如水下机器人、空中机器人等。
功能特点机器人具有多种功能特点,如感知能力、决策能力、行动能力等。
它们可以通过传感器感知环境信息,通过控制器进行决策和规划,并通过执行器实现各种动作和任务。
此外,机器人还具有自主学习和适应环境的能力,可以不断提高自身的智能水平。
在现代社会中应用工业领域01机器人在工业领域的应用已经非常广泛,可以实现自动化生产、提高生产效率和质量。
例如,在汽车制造、电子制造等行业中,机器人可以完成焊接、装配、检测等任务。
服务领域02随着人口老龄化和劳动力短缺问题的加剧,服务机器人的需求越来越大。
服务机器人可以提供家政服务、医疗服务、教育服务等,为人们的生活带来便利和舒适。
特种领域03特种机器人在军事、救援等领域发挥着重要作用。
例如,无人机可以用于侦察和打击敌人目标;水下机器人可以用于海洋资源开发和海底救援等任务。
02机器人结构与工作原理01020304控制器传感器执行器电源主要组成部分根据控制器发出的指令,驱动机器人完成各种动作。
感知外部环境,将环境信息转换为电信号传递给控制器。
(2024年)ABB机器人培训ppt课件

探讨视觉系统与ABB机器人的集成方法,包括硬件连接、软件配置及 调试等,实现机器人的自主导航、目标识别与定位等功能。
22
机器人力控系统与集成应用
力控系统概述
力传感器与选型
介绍机器人力控系统的基本原理、组成部 分及其在工业自动化领域的应用,如装配 、打磨、去毛刺等。
详细讲解力传感器的类型、工作原理及选 型方法,包括力矩传感器、六维力传感器 等。
智能算法在机器人中的应 用
详细讲解智能算法在ABB机器 人中的应用实例,如路径规划 、自主导航、语音识别等。
机器人智能控制系统设计
阐述如何设计基于智能算法的 机器人控制系统,包括系统架 构、算法实现及优化等。
智能算法与机器人集成
探讨智能算法与ABB机器人的 集成方法,包括算法部署、实 时数据处理及系统调试等,实 现机器人的智能化操作。
27
机器人维修与保养注意事项
维修前必须切断电源
在进行任何维修操作前,必须先切断机器人的电 源,以确保维修人员的人身安全。
注意保护机器人的密封性能
在维修过程中,要注意保护机器人的密封性能, 避免灰尘、水分等杂质进入机器人内部,影响其 正常运转。
2024/3/26
使用专用工具和材料
在维修过程中,必须使用专用的工具和材料,以 确保维修质量和安全性。
做好维修记录和报告
在维修过程中,要做好详细的维修记录和报告, 以便后续跟踪和管理。
28
CHAPTER 06
机器人安全与防护
2024/3/26
29
机器人安全操作规范
01
严格遵守机器人操作手 册和安全指南
2024/3/26
02
确保机器人工作区域安 全,无障碍物和人员
wedo课件ppt:《蜘蛛机器人》课件

任务一:模型搭建
步骤二: 搭建动力系统 1)在中间位置安装电机,并连接两个半轴套以便传动,并在两侧安 装异形块和皮带。
任务一:模型搭建
步骤三: 搭建头部 1)将主体利用薄片互锁,并安装运动传感器。
蜘蛛机器人
引入
它叫做仿生机器人,是指可以模仿生物并从事具有生物特点工作的机 器人。
今天咱们要制造一个仿生机器人,你 们来猜一猜它是模仿的哪种生物呢?
蜘蛛
引入
蜘蛛机器人是太空工程师从蜘蛛攀墙特技中得到灵感而创造出 的。它安装有一组天线模仿昆虫触角,当它迈动细长的腿时,这些 触角可探测地形和障碍。他们不仅能攀爬太空越野车无法到达的火 星陡坡地形,而且制造价格也便宜许多。
——分为头部、身体、腿部和动力系统 四个部分。 ——因为电机和卷轮间距较大。
2)咱们利用了运动传感器的什么状态控制模型 上升和下降?
——近距离状态。
任务四:挑战高峰
任务:让蜘蛛机器人感受到蜘蛛网震动后能够进行运动。
蜘蛛的腿部特别厉害,它的腿上有很多纤毛.可以感觉外界最细微的震动,它 可以通过腿上的纤毛感觉到是否有猎物碰撞蛛网,从而达到更有效的出击。
任务一:模型搭建
1)今天咱们的卷轮要能够旋转,咱们可以采用哪种动力系统?
平行传动
2)但是电机和卷轮间距较大,咱 们选择哪种动力系统会更加方便 呢?
皮带传动 皮带传动
任务一:模型搭建
步骤一: 搭建身体 1)利用凸点梁和异形块进行连接,两侧设计出对称结构,利用薄片 进行互锁,后面留出位置安装卷轮。
任务一:模型搭建
任务一:模型搭建
步骤四: 搭建腿部 1)利用异形块当做腿部,一共安装八个,眼睛外形可自行设计,两 个即可。
机器人技术概论PPT完整全套教学课件精选全文完整版

由于当时技术条件的限制,这些玩偶都是身高一米的巨型玩具。现在保留下来的最早的机器人是瑞士努萨蒂尔历史博物馆里的少女玩偶,它制作于二百年前,两只手的十个手指可以按动风琴的琴键弹奏音乐,现在还定期演奏供参观者欣赏,展示了古代人的智慧。
19世纪中叶自动玩偶分为2个流派,即科学幻想派和机械制作派,并各自在文学艺术和近代技术中找到了自己的位置。1831年歌德发表的《浮士德》,塑造了人造人“荷蒙克鲁斯”。1870年霍夫曼出版了以自动玩偶为主角的作品《葛蓓莉娅》。1883年科洛迪的《木偶奇遇记》问世。1886年《未来的夏娃》问世。在机械制作方面,1893年摩尔制造了“蒸汽人”,“蒸汽人”靠蒸汽驱动双腿沿圆周走动。
二、 现代机器人
图1-5所示为水下机器人。将机器人技术(如传感技术、智能技术、控制技术等)扩散和渗透到各个领域形成了各式各样的新机器——智能化机器,如仿生机器人、可重构机器人等。当前与信息技术的交互和融合又产生了“软件机器人”“网络机器人”等新名词,这也说明了机器人所具有的创新活力。
“工欲善其事,必先利其器”,人类在认识自然、改造自然、推动社会进步的过程中,不断地创造出各种各样为人类服务的工具,其中许多具有划时代的意义。作为20世纪自动化领域的重大成就,机器人已经和人类社会的生产、生活密不可分。世间万物,人力是第一资源,这是任何其他物质不能替代的。我们完全有理由相信,像其他许多科学技术的发明发现一样,机器人也将成为人类的好助手、好朋友。
按机械结构
和串联机器人相比较,并联机器人具有以下特点:
(1) 无累积误差,精度较高;(2) 驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度快,动态响应好;(3) 结构紧凑,刚度高,承载能力大;(4) 完全对称的并联机构具有较好的各向同性;(5) 工作空间较小。
乐高EV3初级课程课件 - 仿生蜘蛛PPT85页

拉
60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
乐高EV3初级课程课件 - 仿 生蜘蛛
41、实际上,我们想要的不是针对犯 罪的法 律,而 是针对 疯狂的 法律。 ——马 克·吐温 42、法律的力量应当跟随着公民,就 像影子 跟随着 身体一 样。— —贝卡 利亚 43、法律和制度必须跟上人类思想进 步。— —杰弗 逊 44、人类受制于法律,法律受制于情 理。— —托·富 勒
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
VC C
3
GND
左后中
J11
1
CON14
2
VC C
3
GND
右前中
J14
1
CON17
2
VC C
3
GND
右中中
J17
1 2 3
右后中
J9
1
CON12
2
J12
1
CON15
2
VC C
3
GND
右前内
J15
1
CON18
2
VC C
3
GND
右中内
J18
1 2 3
右后内
CON10 1
CON11 2
方向 控制 信号
控制器
舵
机
光敏传感器
机械机构
实际 方向
障碍物传感器
六足救援机器人多输入多输出控制系统框图
.
22
三、控制系统设计
1、六足蜘蛛救援机器人控制系统总体设计
– MCU的选择。本系统采用AVR单片机 “ATMEGA16”作为核心控制,其优点为:
– ① I/O口可设为推挽输出,输出电流大。 – ② 大多数指令都是单时钟指令,运算速度快。 – ③ 片内集成A/D转换功能,便于光信号的多级度
2
VC C
3
GND
左前内
J4
1
CON7
2
VC C
3
GND
左中外
J5
1
CON8
2
VC C
3
GND
左中中
J6
1
CON9
2
VC C
3
GND
在中内
J7
1
CON10
2
VC C
3
GND
左后外
J10
1
CON13
2
VC C
3
GND
右前外
J13
1
CON16
2
VC C
3
GND
右中外
J16
1 2 3
右后外
J8
1
CON11
持力很大, • 重量小(约60g)。
.
18
二、机械系统及动力设计 3、初定机器人脚部关节长度
由两个 因素确定
舵机的转矩
机器人身躯的 离地高度
选定每只脚的长度为100mm左右
.
19
二、机械系统及动力设计 4、舵机的选定
转矩则必须计算出其舵 机驱动关节的重量以及 力臂。 计算出每只脚的重量;
计算每只脚的力臂:使用AutoCAD2010绘制出脚 部实体图,并使用该软件的“MASSPROP”可求出各零 件的重心。最后用作图法求出脚的重心,从而求出其力 臂,约为90mm,根据力对轴之矩的公式可求出其力矩; 选用辉盛 MG945 180度舵机。
• (2)可在各种复杂地形上爬行,到达轮式机器 人和履带车辆法到达斜度很高的斜坡、山地。
• (3)在山地、戈壁上帮助驮运救援物资、药品。
• (4)在地震后的瓦砾、砖石上行走,并有起重 机功能。救出埋于废墟的生还者。
• (5)攀爬楼梯,进行楼房内火灾救援。
• (6)可用脚砸破大厦玻璃幕墙,垂直向上前进。
CON12 3
CON13 4
5
MOSI
6
MISO
7
SCK
8
RST
9
+5V GND XT AL2
10 11 12
XT AL1 13
RXD 14
TXD 15
CON14 16
CON15 17
CON16 18
CON17 19
CON18 20
IC 1
PB0/T0 PB1/T1 PB2/N0 PB3/N1 PB4/SS PB5/MOSI PB6/MISO P B7/SC K RESET VC C GND XT AL2 XT AL1 PD0/RXD PD1/TXD PD2/INT 0 PD3/INT 1 PD4/OC1B PD5/OC1A PD6/ICP1
40 ADC0 39 ADC1 38 ADC2 37 ADC3 36 ADC4 35 34 33 32 31 30 29 CON1 28 CON2 27 CON3 26 CON4 25 CON5 24 CON6 23 CON7 22 CON8 21 CON9
取样。 – ④ 定时器可以工作在CTC模式,可以立即更新
数据,便于产生多路PWM信号。
.
23
三、控制系统设计 2、步行动作逻辑
1A 2
3
4
B
5
6
直行动作逻辑
1A
4
B
C
2
5
3
6
C D
左转动作逻辑
.
24
三、控制系统设计
开始 I/O口初始化 定时器初始化
3、控制 程序框图
(1)主程序:
后退 右 转
障碍?
.
11
一、六足蜘蛛救援机器人简介
1、结构特点
• (1)智能化的多足步进式车辆,对各种恶劣路况适应 性强;
• (2)具有多足结构,支撑稳定,负重能力强,具有可 能的平衡效果;
• (3)光敏传感器和障碍物传感器,根据环境光强和障 碍物情况自动调整运行方向,作为模型,模拟了根据环境
情况自动做出动作反映的机器人功能;
• (3)伺服电动机舵机作动力,效率和功率质量比高;
• (4)单片机控制电路,满足复杂的控制功能,鲁棒性 高;
• (5)机械轮廓设计生动,爬行姿态优美;
• (6)拥有传统轮式机器人和履带式机器人无法企及的 优势。
.
12
一、六足蜘蛛救援机器人简介 2、在救援中的应用
• (1)根据环境光线强弱和障碍物情况自动控制 其行走方向,在火灾中自动寻找火焰确定灭火目 标。
P A0/ADC 0 P A1/ADC 1 P A2/ADC 2 P A3/ADC 3 P A4/ADC 4 P A5/ADC 5 P A6/ADC 6 P A7/ADC 7
AR EF GND
AVCC PC7/TOSC2 PC6/TOSC1
PC5/TDI PC4/TDO PC3/MTS PC2/TCK PC1/SDA P C0/SC L PD7/OC2
.
20
二、机械系统及动力设计
4、舵机的选定
• 具体参数如下: • 尺寸:40.8*19.9*37.3mm
重量:56.3g 速度:0.24sec/60度(6V) 扭力:12公斤/厘米(6V) 使用电压:4.8-7.2V
.
21
三、控制系统设计
1、六足蜘蛛救援机器人控制系统总体设计
环境光 方向
前 进 阻 力
.
13
二、机械系统及动力设计 1、整体机械结构
.
14
二、机械系统及动力设计 1、整体机械结构
.
15
二、机械系统及动力设计 1、整体机械结构
.
16
二、机械系统及动力设计 1、整体机械结构
.
17
二、机械系统及动力设计 2、动力系统初定
• 舵机 • 通过PWM信号实现角度的准确控制,控制简单, • 内置减速齿轮组,输出转速适中,输出转矩和保
.
1
.
2
.
3
.
4
.
5
.
6
.
7
.
8
五、作品演示
.
9
• 一、六足蜘蛛救援机器人简介 • 二、机械系统及动力设计 • 三、控制系统设计 • 四、制作成本计算 • 五、作品演示
.
10
本作品主要创新点
智能化步进式车辆, 针对复杂现场救援
前进阻力传感器, 自动绕越障碍物
光强分布传感器, 根据环境光自动调整前进方向
直走 后退
光传感ADC
同光? Y
后光?
右转
右光?
左转
左光?
直走
前光? N
.
25
三、控制系统设计
4、 系 统 电 路 图 原 理 图
CON1
VC C GND
舵机接口
CON2
VC C GND
CON3
VC C GND
J1
1
CON4
2
VC C
3
GND
左前外
J2
1
CON5
2
VC C
3
GND
左前中
J3
1
CON6