工业机器人变量的定义及使用
工业机器人的基本参数和性能指标知识讲解

工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
fanuc机器人常用变量
fanuc机器人常用变量
Fanuc机器人是一种广泛应用于工业生产中的自动化设备,常用于装配、焊接、搬运等工作。
它具有高速、高精度、高可靠性等特点,成为现代工厂生产的重要工具。
在Fanuc机器人的应用过程中,常用变量起着重要的作用,下面将介绍一些常见的变量及其用途。
1. 位置变量:Fanuc机器人通过位置变量来确定自身的位置和姿态,以便进行精确的动作控制。
位置变量通常包括机械臂的关节角度、坐标系的原点位置和坐标系的旋转角度等信息。
2. 速度变量:Fanuc机器人的速度变量用于控制机械臂的运动速度。
通过调整速度变量,可以实现机器人在不同工作场景下的快速运动或缓慢移动,以适应不同的生产需求。
3. 力矩变量:Fanuc机器人的力矩变量用于控制机械臂在执行任务时的力量大小。
通过调整力矩变量,可以实现机器人的轻重拾取、精确装配等工作,以满足不同的生产要求。
4. 时间变量:Fanuc机器人的时间变量用于控制机械臂的运行时间。
通过设定时间变量,可以实现机器人在不同时间段内的工作任务切换,提高生产效率。
5. 传感器变量:Fanuc机器人可以配备各种传感器,如视觉传感器、力传感器等,用于感知周围环境和与外界进行交互。
传感器变量用于获取传感器的测量数据,并进行相应的控制处理。
Fanuc机器人常用变量的应用范围广泛,可以适应不同的生产需求。
通过灵活运用这些变量,可以实现机器人的精准操作、高效生产,提高工厂的生产效率和产品质量。
Fanuc机器人的应用正不断拓展,未来将有更多的变量被开发和应用,为工业生产带来更多的便利和效益。
库卡机器人编程语法-概述说明以及解释
库卡机器人编程语法-概述说明以及解释1.引言1.1 概述概述库卡机器人编程语法是指在库卡机器人系统中使用的编程语言规则和规范。
库卡机器人是一种广泛应用于工业生产领域的工业机器人,它能够执行各种任务,并协助人类完成繁重、危险或重复性高的工作。
在库卡机器人编程语法中,我们需要了解语法结构、关键字、表达式和指令等方面的知识。
掌握这些知识有助于我们编写出高效、准确、安全的机器人程序,实现对机器人的精确控制。
库卡机器人编程语法具有以下几个特点:首先,它是一种结构化的编程语言,具有清晰的程序组织结构,便于代码的编写和维护;其次,它支持多种类型的数据和变量,如整数、浮点数、字符串等,以及各种运算符和逻辑操作符,使得程序设计更加灵活;再次,它提供了丰富的控制结构和函数库,能够满足不同的编程需求;最后,它还具备错误处理和调试机制,方便我们定位和修复程序中的错误。
库卡机器人编程语法的学习和掌握对于使用和开发库卡机器人系统至关重要。
正确地使用编程语法可以提高机器人系统的工作效率和准确性,减少人为错误的发生。
同时,熟练地掌握库卡机器人编程语法可以为后续的高级功能开发和应用打下基础,为机器人系统的进一步发展提供支持。
本篇文章将系统地介绍库卡机器人编程语法的要点和基本知识,并结合实际例子进行解读和应用。
通过对概述的研究和学习,读者可以对库卡机器人编程语法有一个全面而深入的了解,为后续的学习和应用打好基础。
1.2 文章结构文章结构部分的内容:在本文中,我们将以库卡机器人编程语法为主题,对其进行深入探讨和分析。
文章主要分为引言、正文和结论三部分。
引言部分首先概述了文章的主题,即库卡机器人编程语法,并简要介绍了本文的结构和目的。
正文部分将着重介绍库卡机器人编程语法的要点。
其中,2.1节将详细阐述库卡机器人编程语法的第一个要点,包括语法的基本概念、常用指令和编程规范等内容。
2.2节则将对库卡机器人编程语法的第二个要点进行探讨,探讨其在实际应用中的具体用法和注意事项。
工业机器人课件-Servo指令的功能、语法结构和使用方法

1 Servo On ' 开启所有的伺服电源 2 Wait M_Svo = 1 ' 等待所有的伺服电源开启 3 Spd M_NSpd ' 将线速度设置在最佳速度模式 4 Mov P1 ' 关节插补至P1坐标系 5 Servo Off ' 关闭所有的伺服电源
Servo指令的功能、语法结构与使用方法
Servo指令的使用方法
1、在非Always运行的插槽中执行该指令时,无需指定机器号;此 时,该指令对机器人本体和所有附加轴均有效。
2、在Always运行的插槽中执行该指令时,必须指定具体机器号; 此时,该指令只对指定的对象有效。
3、必须将参数ALWENA设置为1,并重启控制器电源后,才能在 Always运行的插槽中执行该Servo指令。
Servo指令的功能、语法结构与使用方法
Servo指令的功能、语法结构与使用方法
Servo指令的功能
控制机器人本体或附加轴的伺服电机电源(开启或关闭)。
ห้องสมุดไป่ตู้
Servo指令的功能、语法结构与使用方法
Servo指令的语法结构
① 通常的程序 Servo □ <On/Off>
② 通常执行 (ALWAYS) 程序 Servo □ <On/Off>, <机器号码>
Servo指令的功能、语法结构与使用方法
Servo指令的参数
<On/Off> :On:开启伺服电机的电源 Off:关闭伺服电机的电源。
<机器号码> :以1~3 、常数或变量记述 只有在Always运行的插槽中,才可使用 1:表示机器人本体 2~3:表示附加轴1和附加轴2。
Servo指令的功能、语法结构与使用方法
ABB机器人操作手册(中文版)6

编程环境
变量定义
01
在RAPID语言中,变量用于存储程序中使用的各种数据。变量定义时需要指定变量名和数据类型。
数据类型
02
RAPID语言支持多种数据类型,包括整型、浮点型、布尔型、字符串型等。此外,还提供了专门的数据结构如数组、结构体等以满足复杂数据处理需求。
变量作用域
03
变量的作用域指的是变量在程序中的可见性和生命周期。在RAPID语言中,根据变量的定义位置和方式不同,其作用域可以是局部的或全局的。
03
02
01
03
外部信号控制
通过接收外部信号(如传感器信号、PLC信号等),实现机器人的实时运动控制。
01
手动操作
通过操作手柄或触摸屏,手动控制机器人的运动,包括关节运动、直线运动和圆弧运动等。
02
程序控制
通过编写机器人程序,实现机器人的自动化运动控制,包括点位控制、轨迹规划和速度控制等。
03
CHAPTER
编程与调试
RAPID语言
ABB机器人使用的编程语言是RAPID,它是一种高级、结构化、面向对象的编程语言,专为工业机器人设计。
RAPID语言具有简单易学、功能强大、可移植性好的特点。它支持模块化编程,可以方便地创建和调用子程序,提高代码的可读性和可维护性。
ABB机器人提供了专门的编程环境,包括PC端的RobotStudio软件和机器人控制柜上的示教器。通过这些工具,用户可以轻松地编写、调试和测试RAPID程序。
根据故障现象和硬件检查结果,分析故障原因,并制定相应的维修方案。
了解故障现象
详细询问操作人员故障发生时的现象和过程,以便准确判断故障原因。
查询机器人当前使用的软件版本,并了解最新版本的功能和改进。
工业机器人的基本参数和性能指标知识讲解
工业机器人的基本参数和性能指标工业机器人的基本参数和性能指标表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
(1)工作空间(Work space)工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。
工作空间的性状和大小反映了机器人工作能力的大小。
理解机器人的工作空间时,要注意以下几点:1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。
因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
2)机器人说明书上提供的工作空间往往要小于运动学意义上的最大空间。
这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的最大速度和最大加速度都不一样,在臂杆最大位置允许的极限值通常要比其他位置的小些。
此外,在机器人的最大可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
3)除了在工作守闻边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。
空腔是指在工作空间内臂端不能达到的完全封闭空间。
而空洞是指在沿转轴周围全长上臂端都不能达到的空间(2)运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。
工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。
机器人的自由度数目越多,功能就越强。
日前工业机器人通常具有4—6个自由度。
当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。
工业机器人编程和调试教程
工业机器人编程和调试教程工业机器人的出现和广泛应用大大提高了生产力和生产效率。
为了使工业机器人能够正常工作,工程师们需要进行编程和调试。
本文将向您介绍工业机器人编程和调试的基本步骤和技巧,帮助您顺利完成任务。
一、准备工作在开始工业机器人编程和调试之前,我们需要准备一些必要的工具和资料。
首先,您需要了解所使用的机器人品牌和型号,并下载和安装相应的机器人编程软件。
其次,确保您具备一定的机器人基础知识,包括机器人组成部分、机器人运动轨迹等。
最后,准备好机器人的用户手册、技术规格和相关文档,以便查询和参考。
二、编程环境搭建在进行工业机器人编程之前,我们需要为机器人搭建一个适合的编程环境。
首先,确保机器人连接到电源并开启,然后连接机器人与计算机的通信线缆。
接下来,配置机器人编程软件,设置机器人的IP地址和端口号,确保计算机能够与机器人进行通信。
最后,根据机器人的运动轨迹和任务需求,设置工作区域和安全区域,确保机器人的运动范围和安全性。
三、编程和调试步骤1. 程序编写在进行工业机器人编程之前,我们需要先制定一个程序。
根据机器人的任务需求,确定机器人的运动轨迹、路径规划和执行顺序。
使用机器人编程软件,编写程序并进行调试。
程序的编写包括定义变量、设置运动方向和速度、配置传感器和执行器等。
2. 轨迹规划轨迹规划是指确定机器人的运动轨迹和路径。
根据机器人的工作空间和任务需求,选择合适的运动轨迹规划算法。
常用的轨迹规划算法包括线性插值、圆弧插值和样条插值等。
通过调整机器人的关节角度和位置,使其按照预设的轨迹规划进行运动。
3. 运动控制运动控制是实现机器人运动的关键步骤。
通过控制机器人的关节角度和速度,实现机器人的准确运动。
编程软件提供了不同的运动控制功能,如位置控制、速度控制和力控制等。
根据机器人的任务需求和工作空间,选择合适的运动控制方法。
4. 程序调试编程和调试是工业机器人开发过程中的重要环节。
在进行程序调试之前,我们需要先对程序进行模拟和验证。
《ABB工业机器人操作与编程》习题答案

一、填空题1.约瑟夫·恩格尔伯格2.ABB、库卡、发那科、安川3.移动、可编程、多功能机械手4.机器人本体、示教器、控制器、外部设备5.机体结构、机械传动系统、支承基础、执行机构6.法兰7.电气驱动、液压驱动、气压驱动8.减速机9.谐波减速机、RV减速机10.示教编程器、示教操作盘、液晶屏幕、操作按键二、选择题1.ABCD2.AD3.B4.C5.C6.B7.B8.A三、简答题1.工业机器人的定义:应用于工业的,在人的控制下智能动作,且能在生产线上替代人类进行简单、重复性工作的多关节机械手或多自由度的机械装置。
2.工业机器人的组成:机器人本体、控制器、示教器机器人本体的作用:机体结构和机械传动系统,也是机器人的支承基础和执行机构。
控制器的作用:处理机器人工作过程中的全部信息、控制其全部动作。
示教器的作用:人机交互接口,工业机器人的所有操作基本上都是通过示教器来完成的,它可以用来点动控制机器人动作,也可以编写、测试和运行机器人程序,设定、査阅机器人状态设置和位置等。
3.工业机器人“四大家族”分别是:ABB、库卡、发那科、安川4.工业机器人国内品牌:新松、埃夫特、埃斯顿、华数、广数5.近年来,新推出的机器人产品都朝着智能化、模块化与系统化的方向发展。
具体总结为结构的模块性与可重组性、控制方式的开放性、PC化与网络化、伺服系统的数字性与分散性、综合传感器的实用性、系统的网络化与智能化。
一、填空题1.示教再现工业机器人、感知工业机器人、智能工业机器人2.IRB1203.IRB3604.①机器人运行中,工作区域内有工作人员②机器人伤害了工作人员或损伤了机器设备5.手动减速、手动全速6.机器人本体、软件、外围设备、系统集成、客户服务7.同一条线上(即轴5的角度为0°)8.关闭总电源9.轴1上方10.动力电缆、示教器电缆、SMB电缆二、选择题1.A2.A3.C4.C5.B6.C三、简答题1.主要由电源、电容、主计算机、机器人驱动器、轴计算机板、安全面板和I/O板等组成2.①更换伺服电动机转数计数器电池后②当转数计数器发生故障被修复后③转数计数器与测量板之间断开过④断电后,机器人关节轴发生了移动⑤系统报警提示“10036转数计数器未更新”3.步骤见书P29页4.步骤见书P32页5.步骤见书P33页6.步骤见书P34页7.步骤见书P38页8.步骤见书P41页9.步骤见书P45页10.步骤见书P46页一、填空题1.DSQC651、DSQC652、DSQC653e values from template、Name、Address、Type of Signal、Assigned to Device4.数字输入、数字输出、模拟输入5.8位数字输入、8位数字输出、24V/0V电源6.数字输入信号(di)、数字输出信号(do)、模拟输出信号(ao)7.Digital Output、Analog Output、Group Output8.信号类型、按键9.仿真、消除仿真二、选择题1.D2.C3.A4.C5.A三、简答题1.DSQC651、DSQC652、DSQC653、DSQC355A、DSQC377A2.步骤见书P71—P75页3.步骤见书P66—P71页4.步骤见书P90—P94页5.步骤见书P102—P104页一、填空题1.MoveAbsJ、MoveJ、MoveL、MoveC2.程序、系统3.主程序main4.wobj05.工具数据(tooldata)、工件坐标数据(wobjdata)、有效载荷数据(loaddata)6.TCP位置(trans)、工具姿态(rot)、机械臂的轴配置(robconf)7.程序指针、机械指针8.变量(VAR)、可变量(PERS)、常量(CONST)9.WaitTime、Set二、选择题1.A2.D3.C4.A5.A6.D7.B三、简答题1.N1=5、N2=15、N3=202.N1=5、N2=15、N3=203. WHILE num1<10 DOnum1:=num1+1;ENDWHILE4.MoveJ/L P0,v200,fine,tool0;MoveL P1,v200,z10,tool0;MoveL P2,v100,fine,tool0;MoveC P4,P3,v500,fine,tool0;。
ABB工业机器人典型工程应用
[\WObj] 数据类型: wobjdata 定义用于计算当前机械臂位置的工件坐标系。 如果省略该参数,则使用当前的有效工件。
CJointT 中变元仅需定义程序任务名称
4 读取当前位置数据功能CRobT与CjointT的应用
ENDPROC
5 目标点数据参数赋值的使用方法
目标点数据Robtarget组件的调用
例:控制机器人由当前点,安全移动至自定义工作原点。
PROC MoveToHomePos()
VAR robtarget pActualPos;
pActualpos:=CRobT(\Tool:=Gripper\WObj:=wobj0); pActualpos.trans.z:=pHome.trans.z; !重新定义pActualpos目标点z方向偏移参数为pHome点z方向偏移高度, pActualpos其 他组件数据不变。 MoveL pActualpos,v500,z10,Gripper; !为避免机器人与周边设备发生碰撞,机器人首先由当前点沿着z方向直线移动至 pHome同高的安全位置。 MoveJ pHome,v500,fine,Gripper; !由安全位置移动至机器人原点。
451 Phome.trans.z
调用rot
[0,0.7,0.7,0] Phome.rot
调用q1-q4的方法
0 Phome.rot.q1 0.7 Phome.rot.q2 0.7 Phome.rot.q3 0 Phome.rot.q4
5 目标点数据参数赋值的使用方法
目标点数据Robtarget组件的调用
2024年度-ABB机器人操作手册(中文版)3

机器人将在更多领域得到应用,如医疗、教 育、服务等。随着机器人技术的不断进步和 应用场景的不断拓展,机器人将为人类生 活中不可或缺的一部分。
随着5G、物联网等新技术的普及和 应用,机器人将实现更高效的远程 控制和数据传输,进一步提高机器 人的工作效率和应用范围。
46
THANKS
47
能。
28
运动控制算法优化
力控制
1
2
实现机器人末端执行器的力控制,以适应不同应 用场景。
3
采用力/位混合控制策略,提高机器人操作的灵活 性和准确性。
29
典型应用案例分析
案例一
自动化装配线
描述
机器人在装配线上完成零件的抓取、搬运和装配等任 务。
关键技术
视觉识别、路径规划、力控制等。
30
典型应用案例分析
案例二
焊接应用
描述
机器人执行焊接任务,包括焊缝跟踪、焊接参数调整等。
关键技术
焊缝识别、焊接过程监控、自适应控制等。
31
典型应用案例分析
案例三
协作机器人应用
描述
人与机器人协同工作,共同完成复杂任务。
关键技术
人机交互、安全控制、任务分配与协同等。
32
04
机器人维护与保养知识
33
日常维护注意事项
保持机器人本体清洁,避免 灰尘和杂物堆积影响机器人
自定义快捷键,提高操作 效率。
示教器高级功能
01
03 02
13
编程语言与指令介绍
01
编程语言
02 ABB机器人使用RAPID编程语言,基于Pascal语 言开发。
03 RAPID语言具有结构化编程、模块化设计等特点, 易于学习和使用。
川崎机器人变量定义

川崎机器人变量定义川崎机器人是一种先进的工业机器人,具有多种功能和广泛的应用领域。
在使用川崎机器人时,变量定义是一个重要的环节,它决定了机器人的运行方式和行为。
在本文中,我们将探讨川崎机器人变量定义的相关内容。
变量定义是指在程序中声明并赋予特定值的名称。
在川崎机器人编程中,变量定义是非常重要的,它可以用来存储和处理数据,控制机器人的运动和操作。
下面将介绍川崎机器人变量定义的几个方面。
一、变量的命名规则在川崎机器人编程中,变量的命名需要遵守一定的规则。
首先,变量的名称必须以字母开头,可以包含字母、数字和下划线。
其次,变量名称不能与系统保留字相同,以免产生冲突。
另外,变量的命名应具有一定的描述性,能够清晰表达其含义。
二、变量的类型在川崎机器人编程中,变量的类型包括整型、浮点型、字符型等。
整型变量用于存储整数值,浮点型变量用于存储带有小数的数值,字符型变量用于存储单个字符。
根据不同的需求,选择合适的变量类型可以提高程序的效率和可读性。
三、变量的赋值和使用在川崎机器人编程中,变量的赋值是通过使用赋值符号“=”来实现的。
例如,可以通过将一个值赋给一个变量来存储该值,并在程序中使用该变量。
变量的使用可以包括数学运算、逻辑判断、条件控制等。
四、变量的作用域在川崎机器人编程中,变量的作用域指的是变量的有效范围。
在不同的作用域中,变量可能具有不同的值或者不同的可见性。
一般来说,变量的作用域可以分为全局作用域和局部作用域。
全局作用域的变量在整个程序中都可以访问,而局部作用域的变量只能在特定的代码块中访问。
五、变量的声明和初始化在川崎机器人编程中,变量的声明是指在程序中显式地声明变量的存在。
声明变量时需要指定变量的名称和类型。
变量的初始化是指在声明变量的同时给变量赋予一个初始值。
通过变量的声明和初始化,可以在程序中有效地使用变量。
六、变量的范围和生命周期在川崎机器人编程中,变量的范围指的是变量的可见性。
变量的生命周期指的是变量存在的时间段。
工业机器人编程语言入门教程

工业机器人编程语言入门教程工业机器人在现代工厂中起到了至关重要的作用,能够完成繁重、危险或重复性高的任务。
它们被广泛应用于汽车制造、电子设备装配、物流仓储等领域,极大地提高了生产效率和产品质量。
然而,工业机器人的编程是一项复杂的任务,需要掌握专门的编程语言。
本教程将带您入门工业机器人编程语言,帮助您更好地掌握这一技能。
第一部分:概述1. 工业机器人编程语言的基本概念在开始学习工业机器人编程语言之前,我们先来了解一些基本概念。
工业机器人编程语言是用来控制机器人进行各种任务的指令集合,它可以实现机器人的运动、定位、抓取、放置等功能。
常见的工业机器人编程语言包括ABB的Rapid、Fanuc的KAREL、KUKA的KRL等。
2. 工业机器人编程语言的应用领域工业机器人编程语言被广泛应用在各个领域。
它们可以完成各种自动化任务,比如焊接、喷涂、装配、搬运、包装等。
工业机器人编程语言的应用可以提高生产效率、减少人力成本,并且可以应对高温、高压、有害物质等恶劣环境。
第二部分:工业机器人编程语言入门1. 学习工业机器人编程语言的必备条件在学习工业机器人编程语言之前,您需要具备一定的基础知识。
首先,您需要了解机器人的结构和工作原理,包括关节、执行器、传感器等。
其次,您需要熟悉计算机基础知识,比如操作系统、文件管理、网络通信等。
最后,您需要具备一定的编程基础,了解常见的编程概念和语法。
2. 掌握工业机器人编程语言的基本语法工业机器人编程语言的语法与常见的编程语言有所不同,但它们之间也存在一些共通之处。
在学习工业机器人编程语言的基本语法时,您需要掌握如何定义变量、使用条件语句和循环语句、调用函数和子程序等。
3. 理解工业机器人编程语言的运动控制指令工业机器人的主要任务之一是进行运动控制。
在学习工业机器人编程语言时,您需要了解各种运动控制指令的含义和用法。
比如,通过指定关节角度或者末端执行器坐标来控制机器人的运动轨迹。
CRP工业机器人控制系统定义GI GP变量说明1
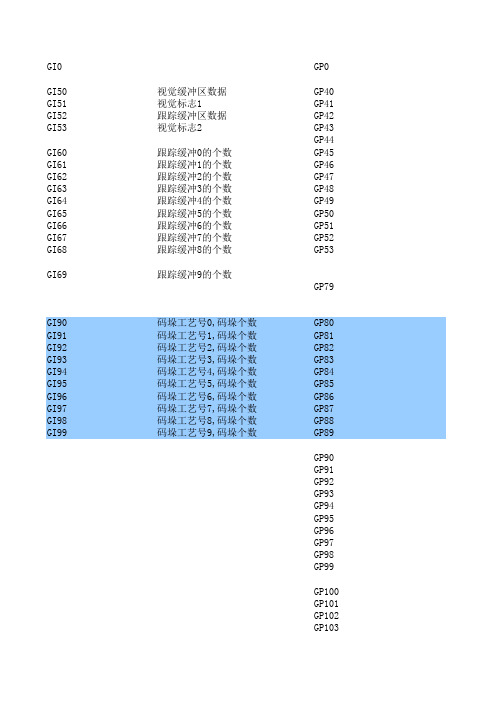
GI0GP0GI50视觉缓冲区数据GP40 GI51视觉标志1GP41 GI52跟踪缓冲区数据GP42 GI53视觉标志2GP43GP44 GI60跟踪缓冲0的个数GP45 GI61跟踪缓冲1的个数GP46 GI62跟踪缓冲2的个数GP47 GI63跟踪缓冲3的个数GP48 GI64跟踪缓冲4的个数GP49 GI65跟踪缓冲5的个数GP50 GI66跟踪缓冲6的个数GP51 GI67跟踪缓冲7的个数GP52 GI68跟踪缓冲8的个数GP53GI69跟踪缓冲9的个数GP79 GI90码垛工艺号0,码垛个数GP80 GI91码垛工艺号1,码垛个数GP81 GI92码垛工艺号2,码垛个数GP82 GI93码垛工艺号3,码垛个数GP83 GI94码垛工艺号4,码垛个数GP84 GI95码垛工艺号5,码垛个数GP85 GI96码垛工艺号6,码垛个数GP86 GI97码垛工艺号7,码垛个数GP87 GI98码垛工艺号8,码垛个数GP88 GI99码垛工艺号9,码垛个数GP89GP90GP91GP92GP93GP94GP95GP96GP97GP98GP99GP100GP101GP102GP103GP104GP105GP106GP107GP108GP109GP110GP111GP112GP113GP114GP115GP116GP117GP118GP119GP120GP121GP122GP123GP124GP125GP126GP127GP128GP129GI100码垛工艺号10,码垛个数GP130 GI101码垛工艺号11,码垛个数GP131 GI102码垛工艺号12,码垛个数GP132 GI103码垛工艺号13,码垛个数GP133 GI104码垛工艺号14,码垛个数GP134 GI105码垛工艺号15,码垛个数GP135 GI106码垛工艺号16,码垛个数GP136 GI107码垛工艺号17,码垛个数GP137 GI108码垛工艺号18,码垛个数GP138 GI109码垛工艺号19,码垛个数GP139GI110码垛工艺号20,码垛个数GP140 GI111码垛工艺号21,码垛个数GP141 GI112码垛工艺号22,码垛个数GP142 GI113码垛工艺号23,码垛个数GP143 GI114码垛工艺号24,码垛个数GP144 GI115码垛工艺号25,码垛个数GP145 GI116码垛工艺号26,码垛个数GP146GI117码垛工艺号27,码垛个数GP147 GI118码垛工艺号28,码垛个数GP148 GI119码垛工艺号29,码垛个数GP149GI120码垛工艺号30,码垛个数GP150 GI121码垛工艺号31,码垛个数GP151 GI122码垛工艺号32,码垛个数GP152 GI123码垛工艺号33,码垛个数GP153 GI124码垛工艺号34,码垛个数GP154 GI125码垛工艺号35,码垛个数GP155 GI126码垛工艺号36,码垛个数GP156 GI127码垛工艺号37,码垛个数GP157 GI128码垛工艺号38,码垛个数GP158 GI129码垛工艺号39,码垛个数GP159GI130码垛工艺号40,码垛个数GP160 GI131码垛工艺号41,码垛个数GP161 GI132码垛工艺号42,码垛个数GP162 GI133码垛工艺号43,码垛个数GP163 GI134码垛工艺号44,码垛个数GP164 GI135码垛工艺号45,码垛个数GP165 GI136码垛工艺号46,码垛个数GP166 GI137码垛工艺号47,码垛个数GP167 GI138码垛工艺号48,码垛个数GP168 GI139码垛工艺号49,码垛个数GP169GP170GP171GP172GP173GP174GP175GP176GP177GP178GP179跟踪工艺0的A点位置记录跟踪工艺1的A点位置记录跟踪工艺2的A点位置记录跟踪工艺3的A点位置记录跟踪工艺4的A点位置记录跟踪工艺5的A点位置记录跟踪工艺6的A点位置记录跟踪工艺7的A点位置记录跟踪工艺8的A点位置记录跟踪工艺9的A点位置记录跟踪工艺中,当前物体的机器人位置跟踪工艺中,当前物体的机器人位置视觉工艺中,当前物体的机器人位置视觉工艺中,当前物体的机器人位置固定点的机器人位置码垛工艺号0,过度点码垛工艺号1,过度点码垛工艺号2,过度点码垛工艺号3,过度点码垛工艺号4,过度点码垛工艺号5,过度点码垛工艺号6,过度点码垛工艺号7,过度点码垛工艺号8,过度点码垛工艺号9,过度点码垛工艺,准备点码垛工艺,放件点码垛工艺,离开点码垛工艺,自动生成准备点码垛工艺,层对于高度机器人当前实时坐标值工作原点1 M103工作原点2 M104工作原点3 M105工作原点4 M106跟踪0参考点跟踪1参考点跟踪2参考点跟踪3参考点只保存当前记录点的位置跟踪4参考点跟踪5参考点跟踪6参考点跟踪7参考点跟踪8参考点跟踪9参考点空间干涉 M310空间干涉 M311空间干涉 M312空间干涉 M313空间干涉 M314空间干涉 M315空间干涉 M316空间干涉 M317空间干涉 M318空间干涉 M319码垛工艺号10,过度点码垛工艺号11,过度点码垛工艺号12,过度点码垛工艺号13,过度点码垛工艺号14,过度点码垛工艺号15,过度点码垛工艺号16,过度点码垛工艺号17,过度点码垛工艺号18,过度点码垛工艺号19,过度点码垛工艺号20,过度点码垛工艺号21,过度点码垛工艺号22,过度点码垛工艺号23,过度点码垛工艺号24,过度点码垛工艺号25,过度点码垛工艺号26,过度点码垛工艺号27,过度点码垛工艺号28,过度点码垛工艺号29,过度点码垛工艺号30,过度点码垛工艺号31,过度点码垛工艺号32,过度点码垛工艺号33,过度点码垛工艺号34,过度点码垛工艺号35,过度点码垛工艺号36,过度点码垛工艺号37,过度点码垛工艺号38,过度点码垛工艺号39,过度点码垛工艺号40,过度点码垛工艺号41,过度点码垛工艺号42,过度点码垛工艺号43,过度点码垛工艺号44,过度点码垛工艺号45,过度点码垛工艺号46,过度点码垛工艺号47,过度点码垛工艺号48,过度点码垛工艺号49,过度点到位输出 M300 有效到位输出 M301 有效到位输出 M302 有效到位输出 M303 有效到位输出 M304 有效到位输出 M305 有效到位输出 M306 有效到位输出 M307 有效到位输出 M308 有效到位输出 M309 有效。
10《工业机器人操作与编程》教案ppt
培养学生对工业机器人技术的兴趣和创新能力
详细描述
通过实践操作和编程,培养学生对工业机器人技术的兴趣 和创新能力。引导学生思考如何将工业机器人技术应用到 实际生产中,提高生产效率和降低成本。
焊接机器人编程与操作
总结词
掌握焊接机器人的基本操作和编程方法
详细描述
了解焊接机器人的结构和工作原理,掌握焊接机器人的基 本操作,如启动、停止、复位等。学习使用焊接机器人的 编程语言,掌握焊接机器人的编程方法,包括路径规划、 任务调度等。
10《工业机器人操作与 编程》教案
汇报人:可编辑 2023-12-24
目 录
• 课程简介 • 工业机器人概述 • 工业机器人操作基础 • 工业机器人编程基础 • 工业机器人应用实践 • 课程总结与展望
课程简介
01
课程目标
掌握工业机器人基本 操作技能
培养学生对工业机器 人技术的兴趣和创新 能力
理解工业机器人编程 原理和方法
实时操作系统
负责协调和管理机器人的各个部分,确保机 器人的稳定运行。
编程语言
用于编写控制机器人的程序,如ROS( Robot Operating System)。
人机交互界面
提供图形化界面,方便操作人员对机器人进 行控制和监控。
安全防护系统
保障机器人运行过程中的安全,防止意外事 故发生。
工业机器人基本操作
工业机器人操作基
03
础
工业机器人硬件组成
控制器
工业机器人的大脑,负 责接收指令并控制机器
人的运动。
伺服系统
驱动机器人的各个关节 运动的系统,包括电机
和传动装置。
传感器
检测机器人周围环境, 实现机器人与环境的交
robotstdio仿真中rapid程序的功能与指令注意事项

robotstdio仿真中rapid程序的功能与指令注意事项一、简介在robotstdio仿真中,使用RAPID(Robot Application Programming Interface Development)程序可以实现对机器人的控制和编程。
RAPID是ABB(Asea Brown Boveri Ltd.)公司开发的一种编程语言,它专门用于ABB工业机器人的控制和运动。
在本文中,我们将深入探讨robotstdio仿真中RAPID程序的功能和指令注意事项。
二、RAPID程序的功能RAPID程序具有以下主要功能:1. 机器人动作控制通过RAPID程序,可以实现对工业机器人的动作控制。
可以定义机器人的姿态、路径和运动方式,控制机器人的移动和执行特定的动作。
RAPID支持直线移动、圆弧运动、螺旋运动等多种运动方式,使机器人能够适应不同的任务需求。
2. 程序流程控制RAPID程序支持条件语句、循环语句和子程序调用等控制结构,可以实现程序的流程控制。
通过判断条件和循环执行特定的代码块,可以根据需要控制机器人的执行流程。
这样可以实现自动化工作流程,提高生产效率。
3. 传感器数据处理通过RAPID程序,可以获取和处理机器人周围的传感器数据。
机器人可以配备各种传感器,如视觉传感器、力传感器等,通过RAPID程序可以获取传感器数据,并对其进行处理和分析。
这样可以实现机器人的感知能力,使其能够自主地适应不同的工作环境。
4. 数据通信与交互RAPID程序支持与外部设备的数据通信和交互。
通过RAPID程序,可以实现机器人与其他设备的连接和数据交换,如与上位机、PLC(Programmable Logic Controller)或其他机器人的通信。
这样可以实现机器人与其他设备的协同工作,提高整体系统的性能。
三、指令注意事项在编写RAPID程序时,需要注意以下指令注意事项:1. 标识符的命名规则在RAPID程序中,标识符用于表示变量、过程和模块等。
发那科机器人自变量ar设定

发那科机器人自变量ar设定发那科机器人自变量AR设定发那科机器人是一种高性能的工业机器人,广泛应用于各种生产制造行业。
在使用发那科机器人时,我们需要对其进行一些设置和调整,以确保其正常运行。
其中一个重要的设置就是自变量AR设定。
下面将详细介绍发那科机器人自变量AR设定的相关内容。
一、什么是自变量AR?在介绍自变量AR设定之前,首先需要了解什么是自变量AR。
简单来说,自变量AR就是指机器人在执行任务时所需的参数集合。
这些参数包括位置、速度、加速度等等。
通过对这些参数进行调整和优化,可以使机器人的运动更加精准、稳定和高效。
二、为什么需要进行自变量AR设定?为了保证发那科机器人的高效运行和精确控制,需要对其进行自变量AR设定。
具体来说,有以下几个原因:1. 优化运动轨迹:通过对自变量AR进行调整和优化,可以使机器人在执行任务时运动轨迹更加精准、平滑和高效。
2. 提高生产效率:通过合理设置自变量AR,可以使机器人在执行任务时速度更快、运动更稳定,从而提高生产效率。
3. 减少机器人故障:通过对自变量AR进行合理设置,可以减少机器人在执行任务时出现的故障和问题,提高机器人的可靠性和稳定性。
三、如何进行自变量AR设定?了解了自变量AR的概念和重要性之后,下面介绍一下具体的自变量AR设定方法:1. 确定任务要求:首先需要明确机器人执行任务的具体要求,包括工件尺寸、形状、重量等等。
这些因素会影响机器人运动轨迹和速度等参数的设置。
2. 设置位置参数:根据任务要求,在发那科机器人控制系统中设置机器人的位置参数。
这些参数包括X、Y、Z轴坐标值、旋转角度等等。
3. 设置速度参数:根据任务要求,在发那科机器人控制系统中设置机器人的速度参数。
这些参数包括最大速度、加速度、减速度等等。
4. 设置力矩参数:根据任务要求,在发那科机器人控制系统中设置机器人的力矩参数。
这些参数包括最大扭矩值、最大载荷能力等等。
5. 测试和调整:完成以上设置之后,需要进行测试和调整。
工业机器人三个关键程序数据-工具坐标系

工业机器人三个关键程序数据-工具坐标系在工业自动化生产过程中,机器人技术的应用越来越广泛。
工业机器人的控制程序是机械臂能否精准运动的关键。
其中,工具坐标系是机器人程序中不可或缺的一个重要参数。
本文将详细介绍工业机器人程序中三个关键数据之一-工具坐标系。
工业机器人简介工业机器人是自动化生产中的一种抢手装备。
它可以代替人的作业,完成大量机械和重复性的生产任务。
与传统机械制造相比,工业机器人具有以下优势:•安全性: 不仅能保护生产线上的工人,还能维护设备安全。
•精准性: 机械臂根据指令动作,操作精度可达0.01mm。
•生产效率: 工业机器人能够实现高速和良好的动作控制,同时还能进行非常复杂的生产操作。
因此,工业机器人的使用范围逐渐扩大,如制造业、物流仓储、医疗等领域。
工具坐标系在工业机器人的程序中,工具坐标系是非常重要的一个参数。
它定义了机器人的末端工具的位置和方向,也就是机器人操作时所使用的刀具、笔、夹具等工具的坐标系。
通过定义工具坐标系,机器人可以在三维空间中的任意点进行操作,而不用考虑工件的位置和方向。
这样可以提高机器人的生产效率。
工具坐标系有两个主要的坐标系:基座坐标系和工具坐标系。
基座坐标系是以机器人安装基座为原点建立的坐标系,而工具坐标系则是以机器人末端执行器上的工具为原点建立的坐标系。
机器人的机械臂位置由六个自由度协调控制实现。
三个位置坐标代表机械臂所处的位置,三个角度坐标代表机械臂的方向。
因此,工业机器人的工具坐标系需要设置六个变量来定义末端工具的方向和位置。
这6个变量通常被称为末端位姿。
工具坐标系是工业机器人的重要数据之一,因为它代表了刀具、笔、夹具等工具的位置和方向,是机器人控制程序的关键因素,是控制机器人运动准确性和精度的基础。
工具坐标系的制定与应用在工业机器人的控制程序中,创建工具坐标系是必须的,否则,机器人的运动与控制将无从谈起。
由于机器人可插拔式工作部件,工具坐标系需要定期更新,以确保工具操作的准确性与精度。
工业机器人现场编程K-简单数据和数组的使用-课件

3)逻辑运算 (NOT)反向 (AND)逻辑“与” (OR)逻辑“或” (EXOR)“异或”
KRL Arrays/数组
数组即Arrays,可为具有相同数据类型并借助下标区分的 多个变量提供存储位置,数组的存储位置是有限的,即最大 数组的大小取决于数据类型所需的存储空间大小。 声明时,数组大小金额数据类型必须已知,KRL中的起 始下标始终从1开始,初始化始终可以逐个进行,在SRC文 件中的初始化也可以采用循环方式进行。 1维数组 数组的维数有1维数组,2维数组,3维数组,但KRL不支 2维数组 持4维及4维以上的数组。
涉及到简单数据类型的工作
使用简单的数据类型有以下几种: 1)整数(INT):用于计数循环或件数计数器的经典计数变 量 2)实数(REAL):为了避免四舍五入出错的运算结果 3)布尔数(BOOL):经典式“是”/“否”结果 4)单个字符(CHAR):仅是一个字符,字符串或者文本只 能作为CHAR数组来实现
枚举数据类型的有效性和生存期规定为,创建的局部枚 举类型在到达END行便无效,在多个程序中使用的枚举类型
总结
• 了解KRL中数据的保存方式 • 了解变量的命名规范及KRL中的数据类型 • 掌握变量的声明及其原理和操作步骤
• 掌握简单数据类型变量的初始化操作方法
• 掌握数组的声明及其初始化
1)基本运算类型 (+)加法 (-)减法 (*)乘法 (/)除法 4)比较运算 (==)相同/等于 (<>)不同 (>)大于 (<)小于 (>=)大于等于 (<=)小于等于
2)位运算 (B_NOT)按位取反运算 ( B_AND)按位与 (B_OR)按位或 (B_EXOR)按位异或 5)标准函数 绝对函数 根函数 正弦和余弦函数 正切函数 反余弦函数 反正切函数 多种字符串处理函数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 点击变量前的+号,可以展开位置变量。
• 空间型的变量显示XYZABC,表示末端点的空间位姿。 • 强烈建议不要直接修改位置变量的数据,可能会造成撞 机。如有必要,请在专人指导下进行。
变量的定义
• 程序中除语法外的参数都可以称为变量。 • 机器人的位置称为位置型变量,如PTP(AP0),这里PTP 为语法,表示点到点的运动,AP0就是位置变量。AP0 是该位置变量的名称,它对应的数值可以在相应菜单显 示或修改。
变量监视器
• 首先要登陆并加载需要运行的程序 • 按X=按钮,在弹出菜单选择变量监测。 • 点击项目(P)或程序(L)前的+号可以查看变量。 • 点击变量前的+号可以看到变量数据并修改。
• 变量名不能以数字开头。
新建/修改IO变量
• IO变量除了数值外,还需指定对应的通讯端口。 • IO变量有多种类型,需要设定不同的通讯端口。如传感器和电磁 阀的信号通常为数字量,为BOOL型,需要指定数字量端口。机 器人与PLC的通讯为整型。 • 选择输入或输出端口,然后在弹出窗口输入端口 选中需要的运动指令,然后确认进入界面。 • 直接点击示教即可记录当前位置。 • 如果用之前建立好的参数直接在下拉菜单中选择。
添加运动参数
• 如果需要添加运动参数,选中需要添加的参数行,然后点击变量 • 如果用之前建立好的参数直接在下拉菜单中选择。 按钮,选择新建。
数字量IO的使用
变量操作
• 点击变量按钮,弹出菜单中保护新建、重命名、剪切、复制、粘 贴、删除命令。 • 如果在点击变量按钮前选中的是项目,则建立的变量应用于整个 项目。如果是程序则只能用于该程序。同样也可以在系统或全局 中新建变量,但强烈建议不要这么做。
新建变量
• 选择变量分类和类型,然后根据需要修改变量名,确认后按确定 按钮。 • 变量名没有实际意义,只是辅助记忆。系统会自动生成带序号的变量名,如 没有特殊需求可以直接使用默认的变量名。
新建/修改运动参数
• 机器人运动速度等需要通过参数设置,通常我们不做设置,以环 境的百分比动作。但在某些时候需要进行单独设置。 • 通常只需修改关节速度(单位:百分比)和实际速度(单位:厘 米每分钟)。其他的参数建议不要修改。
新建程序/变量
• 在程序界面点击新建按钮进入菜单。 • 根据需要选择变量类型,与变量监测界面下新建变量类似。
工业机器人应用技术大赛 培训手册
工业机器人篇
江苏汇博机器人技术有限公司
Leonyuan 2015年5月
程序结构
• 机器人的程序语法与C语言相近。 • 支持各种嵌套结构。 • 程序中的位置、IO、参数等都是通过各种类型的变量记录,通过 相应语法调用。 • 在变量监控界面可以新建、修改变量。 • 在程序修正界面也可以新建、修改变量。
• 新建开关量的变量,选择输入或输出类型。 • 选择新建变量,或直接在下拉菜单中选择。 • 对于输出型变量,还需要设置输出的值。通常直接在下拉菜单中 选择。
MODBUS的IO使用
• 在变量监测中建立IIN和IOUT型的变量。 • IIN型的变量使用,使用WAIT命令等待表达式,或与IF语句组合表达式。 • IOUT型的变量使用,使用WAIT命令等待表达式,或赋值语句给 相应变量赋值。。