第五章 SAR干涉测量(完整)第五章 SAR干涉测量(完整)中科院微波遥感
微波遥感

微波遥感技术和应用机械工程学院机械设计制造及其自动化张霁1005040221一、遥感技术的介绍遥感技术是20世纪60年代兴起的一种探测技术,是根据电磁波的理论,应用各种传感仪器对远距离目标所辐射和反射的电磁波信息,进行收集、处理,并最后成像,从而对地面各种景物进行探测和识别的一种综合技术。
目前利用人造卫星每隔18天就可送回一套全球的图像资料。
利用遥感技术,可以高速度、高质量地测绘地图。
它好比孙悟空的一双火眼金睛,能从云朵上看清万物根本面目,从高空感知地下和海底的宝藏。
二、微波遥感的定义运用波长为1~1 000mm的微波电磁波的遥感技术。
包括通过接收地面目标物辐射的微波能量,或接收遥感器本身发射出的电磁波束的回波信号,根据其特征来判别目标物的性质,特征和状态,包括被动遥感和主动遥感技术。
微波遥感对云层、地表植被、松散沙层和冰雪具有一定的穿透能力,可以全天侯工作。
微波遥感是传感器的工作波长在微波波谱区的遥感技术,是利用微波投射于物体表面,由其反射回的微波波长改变及频移确定其大小、形态以及移动速度的技术。
常用的微波波长范围为0. 8~30厘米。
其中又细分为K、Ku、X、G、C、S、Ls、L等波段。
微波遥感的工作方式分主动式(有源)微波遥感和被动式(无源)微波遥感。
前者由传感器发射微波波束再接收由地面物体反射或散射回来的回波,如侧视雷达;后者接收地面物体自身辐射的微波,如微波辐射计、微波散射计等。
三、遥感技术的发展史遥感是以航空摄影技术为基础,在20世纪60年代初发展起来的一门新兴技术。
开始为航空遥感,自1972年美国发射了第一颗陆地卫星后,这就标志着航天遥感时代的开始。
经过几十年的迅速发展,目前遥感技术已广泛应用于资源环境、水文、气象,地质地理等领域,成为一门实用的,先进的空间探测技术。
1、萌芽时期1608年制造了世界第一架望远镜。
1609年伽利略制作了放大三倍的科学望远镜并首次观测月球。
1794年气球首次升空侦察。
遥感问答之SAR、InSAR、D-InSAR
遥感问答之SAR、InSAR、D-InSAR ⼩课堂在地质灾害监测相关场合中经常会出现“SAR”、“InSAR”、“D-InSAR”这些名词的⾝影,那么是如何⼯作的?针对这些问题,在什么是SAR? SAR有什么特征?InSAR、D-InSAR是如何⼯作的?究竟什么是这⾥和⼤家⼀起学习⼀下关于SAR的那些事。
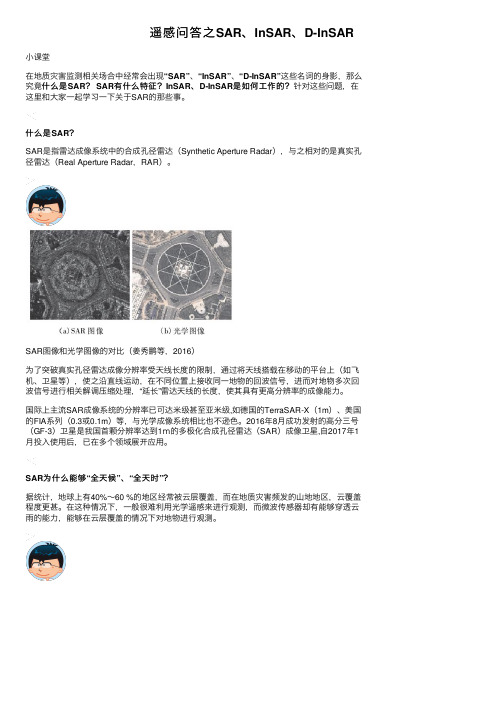
什么是SAR?SAR是指雷达成像系统中的合成孔径雷达(Synthetic Aperture Radar),与之相对的是真实孔径雷达(Real Aperture Radar,RAR)。
SAR图像和光学图像的对⽐(姜秀鹏等,2016)为了突破真实孔径雷达成像分辨率受天线长度的限制,通过将天线搭载在移动的平台上(如飞机、卫星等),使之沿直线运动,在不同位置上接收同⼀地物的回波信号,进⽽对地物多次回波信号进⾏相关解调压缩处理,“延长”雷达天线的长度,使其具有更⾼分辨率的成像能⼒。
国际上主流SAR成像系统的分辨率已可达⽶级甚⾄亚⽶级,如德国的TerraSAR-X(1m)、美国的FIA系列(0.3或0.1m)等,与光学成像系统相⽐也不逊⾊。
2016年8⽉成功发射的⾼分三号(GF-3)卫星是我国⾸颗分辨率达到1m的多极化合成孔径雷达(SAR)成像卫星,⾃2017年1⽉投⼊使⽤后,已在多个领域展开应⽤。
SAR为什么能够“全天候”、“全天时”?据统计,地球上有40%~60 %的地区经常被云层覆盖,⽽在地质灾害频发的⼭地地区,云覆盖程度更甚。
在这种情况下,⼀般很难利⽤光学遥感来进⾏观测,⽽微波传感器却有能够穿透云⾬的能⼒,能够在云层覆盖的情况下对地物进⾏观测。
微波传感器(ASAR,灰⾊图)的云穿透效果,彩⾊底图底图为光学传感器(MERIS)(图源:Space in Images© ESA)根据传感器能够接受电磁波频率的不同,可将对地观测系统⼤致可分为两类,即光学遥感和微波遥感。
微波的波长处于1mm~1000 mm范围内,⾜够长的波长使其能够绕过云层的粒⼦结构进⾏传播,也就是“衍射现象”;波长⼤于3 cm的微波甚⾄可以在⼤⾬环境下传播。
微波遥感理论与技术基础(4)

A
Ex E y
2
2
Ex arctan Ey
董晓龙 dxl@
国家863计划微波遥感技术实验室
The National Microwave Remote Sensing Laboratory
椭圆极化参数
椭圆角
b arctan a
• 北极:左旋; • 南极:右旋;
arctan ,2 纬度
Ex , 经度 arctan 2 Ey
a b
物理意义: 球的半径:表示极化波的幅度; 通过球心的相反方向:表示正 交极化。
董晓龙 dxl@
国家863计划微波遥感技术实验室
• Q>0: 趋向垂直极化; • Q<0: 趋向水平极化;
1 E2 E2 V H 2 2 cos 2 cos 2 EV EH I 1 U,V:表示两个极化的相位差。 2E H E V cosHV sin 2 cos 2 U:同相; 2E E sin sin 2 HV H V
电磁波极化特性的描述, 极化波的叠加, 极化的表示, 被动微波极化测量, 雷达极化测量, 极化特性。
董晓龙 dxl@
国家863计划微波遥感技术实验室
The National Microwave Remote Sensing Laboratory
4.1 极化波的描述
被动微波遥感: H和V极化的幅度 H和V极化的相位差; 主动微波遥感(雷达遥感) 发射和接收的极化组合; 接收信号H和V的幅度; 接收信号H和V的相位差; 星载SAR的极化方式 ERS-SAR(VV) JERS-SAR(HH) PALSAR(ALOS), Radarsat2(Quadpol)
微波遥感智慧树知到答案章节测试2023年长安大学
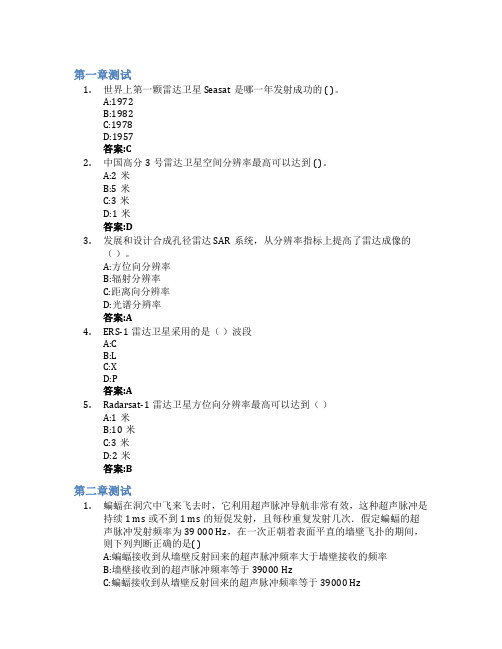
第一章测试1.世界上第一颗雷达卫星Seasat是哪一年发射成功的 ( )。
A:1972B:1982C:1978D:1957答案:C2.中国高分3号雷达卫星空间分辨率最高可以达到 ( )。
A:2米B:5米C:3米D:1米答案:D3.发展和设计合成孔径雷达SAR系统,从分辨率指标上提高了雷达成像的()。
A:方位向分辨率B:辐射分辨率C:距离向分辨率D:光谱分辨率答案:A4.ERS-1雷达卫星采用的是()波段A:CB:LC:XD:P答案:A5.Radarsat-1雷达卫星方位向分辨率最高可以达到()A:1米B:10米C:3米D:2米答案:B第二章测试1.蝙蝠在洞穴中飞来飞去时,它利用超声脉冲导航非常有效,这种超声脉冲是持续1 ms或不到1 ms的短促发射,且每秒重复发射几次.假定蝙蝠的超声脉冲发射频率为39 000 Hz,在一次正朝着表面平直的墙壁飞扑的期间,则下列判断正确的是( )A:蝙蝠接收到从墙壁反射回来的超声脉冲频率大于墙壁接收的频率B:墙壁接收到的超声脉冲频率等于39000 HzC:蝙蝠接收到从墙壁反射回来的超声脉冲频率等于39000 HzD:蝙蝠接收到从墙壁反射回来的超声脉冲频率等于墙壁接收的频率答案:A2.关于电磁波,下列说法中正确的是()A:均匀变化的电场产生均匀变化的磁场,均匀变化的磁场产生均匀变化的电场B:电场不一定能产生磁场,磁场也不一定能产生电场C:电磁波在真空中的传播速度与电磁波的频率有关D:稳定的电场产生稳定的磁场,稳定的磁场产生稳定的电场答案:B3.电磁波天线是利用电磁波哪种特性制成的()A:相干性B:绕射C:衍射D:叠加答案:A4.电磁波进入两个介质表面时()A:只会产生反射波B:只会产生折射波和散射波C:只会产生散射波D:会产生反射波、折射波和散射波答案:D5.电磁波散射的能量与()有关A:地面反射率B:分界面相对于入射波长的粗糙程度C:分界面的几何尺寸D:地面温度答案:A第三章测试1.下列说法不正确的是()。
微波遥感第五章

侧视雷达图像的几何变形分析 侧视雷达图像的构像方程普通几何校正方法和利用雷达模拟图像的方法 利用构像方程的几何校正方法第五章微波图像的几何纠正①等效中心投影雷达影像比例尺是变化的,取平均比例尺框幅影像比例尺各处一致,假定同时观测微波图像的几何纠正5.1侧视雷达图像的几何变形分析1. 斜距投影变形微波图像的几何纠正①等效中心投影x :方位向y :距离向dr :拂掠延迟5.1侧视雷达图像的几何变形分析1. 斜距投影变形微波图像的几何纠正v 阴极射线管上亮点的扫描速度C 为雷达波在空间的传播速度H 是传感器高度f为等效焦距λ影像平均比例尺2v f C H=真实孔径雷达:②等效焦距5.1侧视雷达图像的几何变形分析1. 斜距投影变形λ=SAR 等效焦距计算?对于SAR影像来说,由于无法得到精确的等效焦距,所以该方程是SAR近似构像方程,一般用于精度要求不高的地区影像的几何纠正。
②等效焦距1. 斜距投影变形∵斜距为R p = H / cos θy p = λR p = λH / cos θ= f / cos θ地面点P 在等效的中心投影图象oy ′上的成像点p '的坐标为y p '= f tg θ③变形误差雷达图象坐标和等效中心投影图象坐标间的转换关系y p = ( y p '/ tg θ) / cos θ= y p'/ sin θ= y p'/ sin [ arctg ( y p'/ f )]y p '= f sin θ/ cos θ= y p sin θ= y p sin [ arccos ( f / y p )]斜距投影的变形误差为dy = y p -y p'= f ( 1/ cos θ-tg θ) = y p {1 –sin [ arccos ( f / y p )]}微波图像的几何纠正5.1侧视雷达图像的几何变形分析y p = λR p = λH / cos θ= f / cos θ微波图像的几何纠正5.1侧视雷达图像的几何变形分析2.地形起伏影响S fy drpH2.地形起伏影响没有地形起伏时P 点坐标有地形起伏时则图像上的变形为这里只是将地面点投影到大地基准面上分析投影差而地面点(在基准面上)还有斜距投影差(与等效中心投影之差异)整个的投影差还须考虑斜距投影差。
合成孔径雷达差分干涉测量ppt课件

差分干涉测量的原理 两轨法
其基本思想是利用已知的外部DEM来消除地形相位。 在两轨法中,外部DEM的精度、空间分辨率、插值方法及干涉基线对形变 量的精度都有显著的影响。
5
差分干涉测量的原理 三轨法 是由1994年由Zebker等人提出的,由于该方法可以直接从SAR图像中提 取出地表形变信息,被认为是差分干涉模型最经典的方法。
2
差分干涉测量的原理 基本原理 合成孔径雷达干涉测量原理在很多文献中已有详细介绍。现在将以星载 重复轨道为例简要介绍差分合成孔径雷达干涉基本原理。
3
差分干涉测量的原理
如图所示,S.、S2和S3分别为卫 星三次对同一地区成像的位置(即成像 时雷达天线的位置)。则经相位干涉处 理,由S。和S2可生成一幅干涉图,s, 和S 可生成另一幅干涉图,利用这两 幅干涉图进行差分处理,即所谓的差 分雷达干涉测量。
11差分干涉测量的原理差分干涉方所需数据dem两景图像和一个dem外部不需要三景sar图像由一个insar像对形成需要四景sar图像由一个insar像对形成需要12差分干涉测量的应用目前dinsar的应用主要集中在地震同震形变场的监测火山形变的监测冰川运动的监测地面沉降的监测等领域
合成孔径雷达差分干涉测量原理
由一个InSAR像对 形成
解缠 不需要 需要 需要
12
差分干涉测量的应用 目前D-InSAR的应用主要集中在地震同震形变场的监测、火山形变的监
测、冰川运动的监测、地面沉降的监测等领域。
13
差分干涉测量在地震监测的应用
14
差分干涉测量地震监测的应用
15
差分干涉测量地震监测的应用 地震可以引起电离层异常
16
差分干涉测量在地表沉降监测的应用
sar干涉测高的原理

sar干涉测高的原理
SAR(Synthetic Aperture Radar,合成孔径雷达)干涉测高原理基于雷达技术,在大范围上实现对地表高程变化的测量。
其原理主要包括以下几个步骤:
1. 雷达发射和接收:SAR雷达在飞行器上或卫星上安装,通过电磁波发射天线向地面发射脉冲信号,然后同时接收反射回来的波束。
2. 脉冲信号处理:接收到的信号经过放大、滤波等处理后,得到有关地表反射率、幅度、相位等信息。
3. 干涉处理:将两次不同时刻的雷达数据进行干涉处理,通过比较两次接收到的信号相位差异,得到地表上目标的高程变化信息。
4. 相位解缠:由于多普勒效应,地面散射体的速度会对相位进行调制,需要对相位进行解缠处理,以获得完整的高程信息。
5. 高程计算:根据解缠后的相位信息,结合雷达的几何参数以及地球自转等因素,计算出地表上的高程信息。
SAR干涉测高原理利用雷达的干涉技术,通过比较两次雷达数据的相位差异,从而实现对地表高程变化的测量。
该原理具有高精度、多时相观测、全天候能力等优点,在地质测绘、城市规划、地质灾害监测等领域具有广泛的应用。
微波遥感

1. 微波遥感的优势与不足?优越性1.微波能穿透云雾,雨雪,具有全天候工作能力2.微波对地物有一定的穿透能力3.微波能提供不同于可见光和热红外遥感所能提供的某些信息4.微波遥感的主动方式可进行干涉测量。
不足1.雷达传感器的空间分辨能力比可见光和近红外传感器低2.其特殊的成像方式使得数据处理和解译相对困难3.与可见光和红外传感器数据不能在空间上位置一致2.电磁波的干涉:有两个(或两个以上的)频率,振动方向相同,相位相同或相位差恒定的电磁 波在空间叠加时,合成波振幅为各个波振幅的矢量和。
因此,会出现交叠区某些地方振动增强,某 些地方振动减弱或完全抵消现象,这种现象称为电磁波的干涉3.电磁波的衍射:如果电磁波投射在一个它不能透过的有限大小的障碍物上,将会有一部分波从 障碍物边界外通过。
这部分波在超越障碍物时,会改变方向,绕过边缘到达障碍物后面,这种使一 些辐射量发生方向改变的现象称为电磁波的衍射4.电磁波的极化:波的极化是指在空间给定点上电场强度矢量的取向随时间变化的特性。
用电 场强度矢量的端点在空间描绘出的轨迹来表示。
如果这种变化具有确定的规律,就称为极化电磁波5.微波的主要大气效应(1)一般来说,电磁波波长越短(频率高),大气衰减越显著,相反,波 长越长(频率低),大气衰减可忽略(2)大气对微波的衰减作用主要有:1.大气中的水分子和氧 分子对微波的吸收2.大气微粒对微波的散射(微粒直径<波长,发生瑞利散射;微粒直径>波长, 发生米氏散射)3.随波长的减小,云层微粒与雨滴微粒对微波的衰减也变得愈发显著1.微波散射计:是一种有源微波遥感器,功能是测量地物表面(或体积)的散射或反射特性2.微波高度计:高度计是一种主动式微波测量仪,具有独特的全天时,长时间历程,观测面积大, 观测精度高,时间准同步,信息量大的能力和特点、3.真实(合成)孔径雷达:运动平台携带真实孔径天线从空中掠过,由天线向平台的一侧或两侧发 射波束并扫描地面。
SAR
SAR合成孔径雷达(Synthetic Aperture Radar),是采用搭载在卫星或飞机上的移动雷达,达到大型天线同样精度的雷达系统。
通过不同时间的2次SAR的观测资料,通过干涉分析,可以高精度地测定一个区域内的形变情况。
InSAR成孔径雷达干涉测量技术(INSAR,Interferometric Synthetic Aperture Radar;简称:干涉雷达测量)是以同一地区的两张SAR图像为基本处理数据,通过求取两幅SAR图像的相位差,获取干涉图像,然后经相位解缠,从干涉条纹中获取地形高程数据的空间对地观测新技术。
D-InSAR差分干涉雷达测量(D-InSAR)技术是利用同一地区的两幅干涉图像,其中一幅是通过形变前的两幅SAR 获取的干涉图像,其干涉相位只包含地形信息,另一幅是通过形变前后两幅SAR 图像获取的干涉图像,这两幅SAR 图像所形成的干涉纹图的相位既包含了区域的地形信息,又包含了观测期间地表的形变信息,其中由地面高程引起的干涉条纹与基线距有关,而由地面变化引起的干涉条纹与基线距无关,所以我们可以通过两幅干涉图差分处理将地形干涉相位去除掉,来获取地表微量形变。
RFM是Rational Function Model的缩写,它是一种普遍适用的恢复遥感影像成像几何关系的模型,它几乎可以表述现有的全部传感器类型,用户可以直接使用RFM进行摄影测量处理,而无须知道传感器类型、传感器物理模型及影像处理过程。
发展以光学机械为主要标志的传统测绘技术体系是20世纪测绘业的主要技术支撑。
为了取得数据,野外测量人员要肩扛背负几十斤重的仪器,奔波在崇山峻岭、戈壁沙漠中。
早期的线划测绘图利用手工和模拟的机械绘制,不仅耗时费力,而且质量不高。
而数字化测绘体系体现在整个测绘作业、生产和服务的流程中,实现数据获取与采集、加工与处理、管理和应用的数字化。
产品形式也从传统的纸质地图变成了4D产品,即数字高程模型(DEM)、数字线划地图(DLG)、数字栅格地图(DRG)和数字正射影像地图(DOM),这是对传统测绘生产流程的一次革命。
微波遥感和成像侧视雷达工作基本原理
微波遥感和成像侧视雷达工作基本原理概述微波遥感和成像侧视雷达是两种常用的遥感技术,它们通过利用微波的特性来获取地球表面信息。
本文将介绍微波遥感和成像侧视雷达的工作基本原理。
一、微波遥感的工作原理微波遥感是利用微波信号对地球物体和环境进行探测和测量的一种技术。
微波遥感系统由微波源、发射器、接收器和数据处理系统等组成。
1. 微波源微波源是产生微波信号的装置,常见的有微波发射机、毫米波源等。
微波源将电能转化为微波能量,并通过天线辐射出去。
2. 发射器发射器是将微波信号传输到目标物体的装置。
它可以调节微波信号的频率、幅度和极化等参数,并将微波信号辐射出去。
3. 接收器接收器是接收由目标物体反射回来的微波信号的装置。
它可以接收微波信号的幅度、相位和极化等信息。
4. 数据处理系统数据处理系统对接收到的微波信号进行处理和分析,从中提取出地球物体的特征信息。
常见的处理方法有滤波、解调、调幅和解调等。
二、成像侧视雷达的工作原理成像侧视雷达(InSAR)是一种利用雷达波束和合成孔径雷达(SAR)数据生成地表高程和表面形变等信息的技术。
1. SAR数据采集SAR是一种全天候、全时序、全天时的遥感技术。
它通过发射和接收脉冲雷达波束,测量地表物体的反射回波。
2. SAR数据处理SAR数据处理主要包括预处理、图像生成和解译等步骤。
预处理用于去除图像中的噪声和干扰,图像生成则是从原始数据中合成出高质量的成像结果。
3. 多幅SAR图像融合成像侧视雷达通过将多幅SAR图像进行融合,可以获取地表高程和形变等信息。
这是通过计算不同时间和角度下的雷达干涉图生成的。
4. 数据解译融合后的数据可以利用地表参考点进行几何校正和高程校正,进而得到具体的地表高程和形变等信息。
总结微波遥感和成像侧视雷达是两种常用的遥感技术,它们利用微波信号对地球物体和环境进行探测和测量。
微波遥感通过微波源、发射器、接收器和数据处理系统等装置,获得地球物体的特征信息。
微波遥感
微波遥感一、微波遥感概述1、微波微波是指波长1mm——1m(即频率300MHz——300GHz)的电磁波,包括毫米波、厘米波、分米波,它比可见光-红外(0.38——15μm)波长要大的多。
最长的微波波长可以是最短的光学波长的250万倍。
常用的微波波长范围为0. 8~30厘米。
其中又细分为K、Ku、X、G、C、S、Ls、L等波段。
微波遥感用的是无线电技术。
微波遥感:是传感器的工作波长在微波波谱区的遥感技术,是利用某种传感器接受地理各种地物发射或者反射的微波信号,藉以识别、分析地物,提取地物所需的信息。
微波遥感系统有主动和被动之分。
所谓主动微波遥感系统,指遥感器自身发射能源。
“雷达”是一种主动微波遥感仪器。
雷达是用无线电波探测物体并测定物体距离的,这一过程中需要它主动发射某一频率的微波信号,再接收这些信号与地面相互作用后的回波反射信号,并对这两种信号的探测频率和极化位移等进行比较,生成地表的数字图像或者模拟图像。
微波辐射计是一种被动微波遥感仪器,记录的是在自然状况下,地面发射、反射的微弱的微波能量。
2、微波遥感的历史微波遥感的发展可以追溯到20世纪50年代早期,由于军事侦察的需求,美国军方发展了侧视机载雷达。
之后,侧视机载雷达SLAR 逐步用于非军事领域,成为获取自然资源与环境数据的有力工具。
1978年美国发射的Seasat海洋卫星以及随后发射的航天飞机成像雷达计划、苏联发射的Cosmos1870,标志着航天雷达遥感的开始。
20世纪90年代以来各国相继发射了一系列的星载雷达,单波段单极化雷达遥感得到了很大的发展。
进入21世纪以来另有一系列先进的雷达遥感计划得以实施,使得多波段多极化雷达遥感得到了很大的发展。
这一系列计划的实施大大地推动了极化雷达和干涉雷达等新型雷达的发展,使卫星雷达遥感进入了一个新时代。
我国的微波遥感事业起步于上世纪70年代。
在国家历次科技攻关中,遥感技术都作为重要项目列入。
经过若干阶段的发展,近年来已取得了技术、理论及应用研究的全面发展。
第五章 SAR干涉测量(完整)第五章 SAR干涉测量(完整)中科院微波遥感
SAR干涉测量Ground range Slant range AzimuthA nt e nn af o ot p ri n tS t r i p-ma pS a te ll it e o rb it1S a te ll it e o rb it2InterferometerBaselinePerpendicular BaselineInterferometric system: bistatic (SRTM 2000)y (ground range)zS 1rθHS 2P)exp()(0t j t u ω−c P r P r t n P j t j t u P s s /))()(()())(exp())(exp()()(11111011rr rr +=+−−−∝τϕτωτcP r P r t n P j t j t u P s s /))()(()())(exp())(exp()()(21222022rr rr +=+−−−∝τϕτωτThe SAR interferogram is generated by:multiplying pixel by pixel the first SAR image times the second one complex conjugated.Thus, the interferogram amplitude is the amplitude of the first image times that of the second one.Whereas its phase (called interferometric phase) is the phase difference between the two images.由于入射角的差异使得两幅图像不是完全重合,对它们进行配准处理后,配SAR interferometric phase: geometriccontributionSAR interferometric phase: geometric contribution AzimuthS l a n t r a n g eB r 1r 2Az i m u t h G r ou n d r a n g eB nrPhase ∆≈λπ4Mt. Vesuvius, baseline 250 m.Mt. Vesuvius, baseline 50 m.S l a n t r a n g eAzimuthThe role of the normal baseline The role of the normal baseline S l a n t r a n g eAzimuthBn =250The normal (or perpendicular) baseline is a keyparameter in SAR interferometryThe normal (or perpendicular) baseline is a key parameter in SAR interferometry Bn =50⊥−=∆B R z 02sin 2θλπ辅图像SLC主图像SLCDEM数据选择的原则:基线距与时间相干⎪⎧≤≤10,)sin(sin r µπµ距离向配方位滤波前后方位频谱对比(a)主像滤波前;(b)辅图像滤波前;(c)主图像滤波后;(d)辅图像滤波后A “cleaned”interferogram is achieved by averaging in areas of uniform phase. SNR improves ∝the number of looks. Usually the averaging window is adaptive.Noise sources in interferometry干涉相干All images from Space Shuttle (SIR-C) span Apr-OctFrom: Rosen et al., 1996干涉纹图干涉相干图Amplitude Phase Coherencehundred of meters). Coherence maps cannot measure this noise.Atmospheric artifacts can be up to two fringes. This is converted in elevation error, depending on the baseline. The error cannot beestimated or recovered.Atmospheric artifactsEtna Atmospheric artifacts can be detected in a multi-baseline environment, since atmosphere is incorrelated in time.Paris (+ reflectivity)利用枝切法设置的枝切线干涉纹图与利用Goldstein 算法得到的解缠结果-3-2-10123-3-2-1012301020304050-3-2-1123Original phase Irrotational phaseRotational phase Unwrapped irr. phase(a) 513×513的干涉纹图;(b)基于FFT的无权重的最小二乘算法相位解缠结果;(c)相干图;(d) Goldstein枝切法相位解缠结果实验区1:50000地形图地理编码后的数字高程模型新疆卡拉喀什地区三维透视图三维透视图±6m 90% vertical errorvertical accuracy (relative)±16m 90% vertical error vertical accuracy (absolute)±15m 90% circular error horizontal accuracy (relative)±20m 90% circular error horizontal accuracy (absolute)16-bit Signed Integer Data formatWGS84 or MSL (optionally)Datum (vertical)WGS84Datum (horizontal)1m Height levels 1"x1" Lon& Lat Raster size SRTM DEM ProductSalt Lake City, Utah差分干涉测量。
微波遥感基础

微波遥感基础微波遥感基础微波遥感基础 (1)⼀、微波遥感物理基础 (2)⼆、微波遥感技术的简介 (4)2.1 微波遥感 (4)2.2 微波遥感器 (5)2.2.1 雷达散射计 (5)2.2.2 微波辐射计 (5)2.2.3 雷达⾼度计 (6)2.3 微波遥感技术的特点 (7)2.4 微波遥感的优越性 (7)2.5 微波遥感的不⾜ (7)2.6 微波微波拥有强⼤⽣命⼒的根源 (7)2.7 我国微波遥感的差距 (8)三、雷达概念、分类 (8)3.1 成像雷达 (8)3.2 ⾮成像雷达 (8)3.3 真实孔径雷达 (9)3.4 合成孔径雷达 (9)3.5 极化雷达 (10)3.6 ⼲涉雷达 (11)3.7 激光雷达 (11)3.8 侧视雷达 (11)四、微波遥感图像 (11)4.1雷达图像 (11)4.1.1雷达图像 (11)4.1.2 雷达图像显⽰ (12)4.1.3 雷达图像分辨率 (12)4.1.4 雷达图像的处理 (12)4.2 侧视雷达图像 (13)4.3 雷达图像校准 (14)4.4 雷达图像定标 (14)4.5 雷达图像模拟 (14)五、微波遥感定标 (15)六、微波遥感概念、理论和技术的突破 (15)七、我国微波遥感的差距 (16)⼋、微波相关技术介绍 (17)8.1 偏振探测技术的特点 (17)8.2 微波散射特性 (18)九、微波遥感有待进⼀步研究的问题 (19)⼗、微波遥感的应⽤ (20)10.1 空间对地观测 (20)⼀、微波遥感物理基础电磁波具有波长(或频率)、传播⽅向、振幅和极化⾯(亦称偏振⾯)四个基本物理量。
极化⾯是是指电场振动⽅向所在的平⾯。
电磁波谱有时把波长在mm到km很宽的幅度内通称为⽆线电波区间,在这⼀区间按照波长由短到长⼜可以划分为亚毫⽶波、毫⽶波、厘⽶波、分⽶波、超短波、短波中波和长波。
其中的毫⽶波,厘⽶波和分⽶波三个区间称为微波波段,因此有时⼜更明确地吧这⼀区间分为微波波段和⽆线电波段。
第五章干涉测量技术

★ 均方根偏差 ERMS 指被测波面相对于参考波面的各 点偏差值的均方根值,可用下式表示:
E RMS 1 N 2 Ei N - 1 i 1
最大偏差 EMAX 指被测波面与参考波面的最大偏差值, 可用下式表示
E MAX 1 Emax Emin 2
求得试样表面微观几何形状、场密度分布和光学系统
波像差等,即所谓静态干涉;另一类是通过测量干涉
场上指定点的干涉条纹的移动或光程差的变化量,进
而求得试样的尺寸大小、位移量等,即所谓动态干涉。
分波面是从同一光源等位相面上分两光束产生干 涉(如:杨氏双缝干涉);分振幅是利用分束镜的反射 和透射分出两光束产生干涉(等倾干涉和等厚干涉)。 光学测量常用的是分振幅式等厚测量技术。
(3)、干涉条纹计数与判向
干涉仪在实际测量过程中,由于测量反射镜可能 需要正反两个方向运动,或由于外界振动、导轨误差 等干扰,使反射镜在正向移动中,偶尔有反向移动, 所以,干涉仪中需要设计判向电路,将计数脉冲分为 加和减两种,用可逆计数器进行可逆计算以获得真正 的脉冲数据。
图5-7 干涉条纹判向计数原理框图
分波面法
p 分振幅法
S *
·
p
S*
薄膜
图5-1 普通光源获得相干光的途径
泰曼干涉仪 分光路
斐索干涉仪 部分共光路
§5.1 干涉测量基础 §5.2 基本光学干涉仪 §5.3 光学零件面形误差测量与评价 §5.4 习题
§5.1 干涉测量基础
干涉测量是基于光波叠加原理,在干涉场中产 生亮、暗交替的干涉条纹,通过分析处理干涉条纹 获取被测量的有关信息。
=
干涉图
§5.1.1 干涉条件及其测量保证
干涉SAR在遥感测量中的应用

先例.德 国 D rir公 司研 制的 D S L NS one 0一AR AT AsX I AR 系统 采用 x 波 段 、机 载双 天线模 式 , 于 用
高精度地 形 图的绘制 .其 水平 分辨率 可达 到 ( . ×l 2 m ,高程分 辨率可 达到 (. ×0 5 m 12 _ ) 05 .)
目前 干 涉 S AR 应 用 最成 功 的例 子 是 美 国 航 天 飞机 “ 进 号 ”于 20 奋 00年 2月 ¨ 日到 2 日利 用 2 SR~ I C和 x—AR 对垒 球的地 形测绘 , S 测绘 面积 为 460k 约 占地表 总面 积的 8 ) 经 处理可制 威 数 0 m ( 0 , 字 高程模 型和 三维地 形 图.此 次飞行 所取得 的测绘 成果 . 盖面 大 精度 高 、有统 一的基准 . 覆 不但 在 民用
图 .取得 了 1 以下 的高程 测量精 度.此 后 . 界很 多目家 的科研 人员都加 入到 干涉 S 0m 世 AR 的研 究行 列 里来 , 系统设 计和算法 处 理上都 取得 了较 显 著 的科研成果 . 在 自 19 91年欧洲 空 同局 ( s 发射 E S l卫星 之 后 ,星载 干涉 S E A) R — AR 的研 究得 到 了快速 的发 展 ,尤 其是 日本于 19 发射 J R —、 S 于 19 92年 E Sl E A 95年发 射 E S2和 加 拿大于 19 发射 RAD S R一 95年 AR AT 卫
维普资讯
20 年 第 1 02 6卷 第 1期
华 北 T 学 院 翟 I试 技 术 学 报
V0 . 6 No 1 2 0 I1 . 0 2 ( u No 3 ) S m . 9
( 总第 3 期) 9
雷达干涉测量
雷达干涉测量大作业学院:电子工程学院班级:1402071姓名:张吉凯学号:14020710021一、简述干涉SAR的基本原理,处理步骤,有哪些工作模式,处理中存在哪些难点,以及InSAR的应用领域。
并从原理上说明立体几何量测与干涉成像在对地观测精度的不同。
1.基本原理图1.InSAR成像几何示意图(如果地表无形变)s1(R)=u1(R)exp(i∅(R)) (1)s2(R+∆R)=u2(R+∆R)exp(i∅(R+∆R)) (2)R+arg{u1}(3)φ1=22πλ(R+ΔR)+arg{u2}(4)φ2=22πλΔR)(5)s1(R)s2∗(R+ΔR)=|s1s2∗|exp i (φ1−φ2)=|s1s2∗|exp (−i4πλϕ=−4πΔR+2πN N=0,±1,±2,⋅⋅⋅(6)λ图2.InSAR成像几何示意图(如果地表无形变)sin(θ−α)=(R+∆R)2−R2−B22RB(7)z=H−R cosθ(8)∆R≈B sin(θ−α)+B22R(9)θ=α−arcsin[λϕ4πB](10)如果知道天线位置参数和雷达成像系统参数,就可以从相位中计算出地表的高程值。
把以DEM测量为主要应用的SAR干涉测量技术称为InSAR技术。
它利用雷达向目标区域发射微波,然后接收目标反射的回波,得到同一目标区域成像的SAR复图像对,若复图像对之间存在相干条件,SAR复图像对共轭相乘可以得到干涉图,根据干涉图的相位值,得出两次成像中微波的路程差,从而计算出目标地区的地形、地貌以及表面的微小变化,可用于数字高程模型建立、地壳形变探测等。
2.处理步骤图3.处理步骤InSAR工作模式主要有单航过模式、多航过模式(RTI)。
而单航过模式又分为XTI模式和ATI模式,下面逐一介绍;①XTI:单航过模式中的XTI是一个平台载两幅天线(或者两平台编队)且天线方向为横向,即与轨迹垂直,如SRTM。
②ATI:单航过模式中的ATI是一个平台载两幅天线(或者两平台编队)且天线方向为顺轨道方向,即与轨迹平行,如Tan_DEM。
干涉测量技术
干涉测量技术(冶金与能源工程学院)摘要:干涉测量技术已经得到相当广泛的应用。
一方面因为微电子、微机械、微光学和现代工业提出了愈来愈高的精度和更大的量程,其它方法难以胜任;另一方面因为当代干涉测量技术本身具有灵敏度高、量程大、可以适应恶劣环境、光波和米定义联系而容易溯源等特点,因而在现代工业中应用非常广泛。
本论文阐述了干涉测量技术的光学原理,测试条件,并以迈克尔逊干涉仪为典型,阐明干涉测量技术的应用,迈克尔逊干涉仪是一种利用分割光波振幅的方法实现干涉的精密光学仪器关键词:干涉测量光学原理迈克尔逊干涉仪PSInSARSUN Ya Juan(Metallurgy and energy engineering institute,Kunming university of science and technology)Abstract:Interference measuring technology has been quite a wide range of applications,On the one hand for microelectronics, micro mechanical, diffractive and modern industry and put forward high precision and greater range, other methods are hard to do the job,On the other hand because contemporary interference measuring technology itself has a high sensitivity, range, and can adapt to bad environment, light and meters contact and easy to trace the definition, etc, thus in the modern industry is widely used.This paper expounds the interference of measuring technology of optical principle, test conditions, and with Michelson interferometer is typical, expounds the application of interference measuring technology, Michelson interferometer is a use of segmentation method of realization of light amplitude precision optical instrument interferenceKey words: Interferometry Principles of Optics Michelson interferometer0 、引言光的干涉现象是光的波动性的一种表现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SAR干涉测量
Ground range Slant range Azimuth
A n
t e n
n a
f o o
t p r
i n t
S t r i p-m
a p
S a te ll it e o rb it
1
S a te ll it e o rb it
2
Interferometer
Baseline
Perpendicular Baseline
Interferometric system: bistatic (SRTM 2000)
y (ground range)
z
S 1
r
θ
H
S 2
P
)
exp()(0t j t u ω−c P r P r t n P j t j t u P s s /))()(()
())(exp())(exp()()(11111011r
r r
r +=+−−−∝τϕτωτc
P r P r t n P j t j t u P s s /))()(()
())(exp())(exp()()(21222022r
r r
r +=+−−−∝τϕτωτ
The SAR interferogram is generated by:
multiplying pixel by pixel the first SAR image times the second one complex conjugated.
Thus, the interferogram amplitude is the amplitude of the first image times that of the second one.
Whereas its phase (called interferometric phase) is the phase difference between the two images.
由于入射角的差异使得两幅图像不是完全重合,对它们进行配准处理后,配
SAR interferometric phase: geometric
contribution
SAR interferometric phase: geometric contribution Azimuth
S l a n t r a n g e
B r 1
r 2
A
z i m u t h G r o
u n d r a n g e
B n
r
Phase ∆≈
λ
π
4
Mt. Vesuvius, baseline 250 m.
Mt. Vesuvius, baseline 50 m.
S l a n t r a n g e
Azimuth
The role of the normal baseline The role of the normal baseline S l a n t r a n g e
Azimuth
Bn =250
The normal (or perpendicular) baseline is a key
parameter in SAR interferometry
The normal (or perpendicular) baseline is a key parameter in SAR interferometry Bn =50
⊥
−
=∆B R z 0
2sin 2
θλπ
辅图像SLC
主图像SLC
DEM
数据选择的原则:基线距与时间相干
⎪⎧
≤≤1
0,)sin(sin r µπµ距离向配
方位滤波前后方位频谱对比(a)主像滤波前;(b)辅图像滤波前;(c)主图像滤波后;(d)辅图像滤波后
A “cleaned”interferogram is achieved by averaging in areas of uniform phase. SNR improves ∝the number of looks. Usually the averaging window is adaptive.
Noise sources in interferometry
干涉相干
All images from Space Shuttle (SIR-C) span Apr-Oct
From: Rosen et al., 1996
干涉纹图干涉相干图Amplitude Phase Coherence
hundred of meters). Coherence maps cannot measure this noise.
Atmospheric artifacts can be up to two fringes. This is converted in elevation error, depending on the baseline. The error cannot be
estimated or recovered.
Atmospheric artifacts
Etna Atmospheric artifacts can be detected in a multi-baseline environment, since atmosphere is incorrelated in time.
Paris (+ reflectivity)
利用枝切法设置的枝切线
干涉纹图与利用Goldstein 算法得到的解缠结果
-3-2-10123-3-2-10
1230
10
20
30
40
50
-3
-2
-1
1
2
3
Original phase Irrotational phase
Rotational phase Unwrapped irr. phase
(a) 513×513的干涉纹图;(b)基于FFT的无权重的最小二乘算法相位解缠结果;(c)相干图;(d) Goldstein枝切法相位解缠结果
实验区1:50000地形图地理编码后的数字高程模型
新疆卡拉喀什地区三维透视图
三维透视图
±6m 90% vertical error
vertical accuracy (relative)
±16m 90% vertical error vertical accuracy (absolute)±15m 90% circular error horizontal accuracy (relative)±20m 90% circular error horizontal accuracy (absolute)16-bit Signed Integer Data format
WGS84 or MSL (optionally)Datum (vertical)WGS84
Datum (horizontal)1m Height levels 1"x1" Lon& Lat Raster size SRTM DEM Product
Salt Lake City, Utah
差分干涉测量。