动平衡校正的计算公式
动平衡不平衡量计算公式

动平衡不平衡量计算公式
动平衡不平衡量是用于描述旋转体是否平衡的物理量。
其中,动平衡量是指旋转体的重心与转轴的距离乘以该部件的质量,而不平衡量则是指旋转体在转轴上受到的合外力矩。
它们的计算公式分别为:动平衡量=质量(kg)×距离(m)
不平衡量=力(N)×距离(m)
需要注意的是,动平衡量和不平衡量一般都是用向量表示的,因为它们的方向与旋转轴有关。
此外,在实际应用中,动平衡和不平衡的计算也需要考虑旋转体的刚度、转速、振动等因素。
因此,为了更准确地计算动平衡和不平衡,需要采用专业的测试设备和方法。
动平衡不平衡量计算公式
动平衡不平衡量计算公式
1.动态平衡的基本概念
动态平衡是指在自动控制系统中,利用外部输入(例如温度,湿度,压强,速度等)操纵内部参数(例如加热,冷却,调速等),保持系统运行于一个内部稳定状态,并具有良好的自动调节性能的过程或过程群。
当有恒定外部输入加以操纵时,动态平衡又称为自动平衡。
2.动态平衡的计算公式
动态平衡的计算公式是根据系统的输入-输出特性,利用状态反馈控制模型,利用拉普拉斯变换方法求解出系统的具体计算公式:若系统的输入与输出特性满足状态反馈形式:
y=G(s)x
其中,s为复变量,G(s)为传递函数,x为输入,y为输出,则应用Laplace变换,得到系统的动态平衡计算公式:
Y(s)=G(s)X(s)
其中,Y(s)为系统输出复变量,X(s)为系统输入复变量。
3.动态平衡的应用
动态平衡的应用非常广泛,可以用于控制计算机硬件装置、数据处理系统和各种机械系统的自动化控制。
动平衡计算公式和方法
动平衡计算公式和方法嘿,你问动平衡计算公式和方法啊?这可有点复杂呢。
先说计算公式吧。
动平衡一般用不平衡量来衡量,不平衡量等于质量乘以偏心距。
啥是偏心距呢?就是重心偏离旋转中心的距离呗。
就像你转一个有点歪的轮子,那个歪的程度就是偏心距。
质量好理解吧,就是东西有多重。
所以不平衡量就是这两个家伙乘起来的结果。
那方法呢,首先得找到要做动平衡的东西,比如一个轮子啊,一个风扇啊啥的。
然后把它装在动平衡机上。
这动平衡机就像个医生,能给这个东西做检查。
接着,开动动平衡机,让东西转起来。
这时候动平衡机就能检测出不平衡的地方在哪里,有多大。
就像医生用听诊器听你的心跳,能听出有没有问题。
然后呢,根据检测出来的结果,在合适的地方加上或者减去一些重量。
比如说在轮子的一边加上一个小铁片,或者在风扇的叶片上刮掉一点漆。
这就像你给一个不平衡的天平加上或者减去一些砝码,让它平衡起来。
加或者减重量的时候要小心哦,不能太多也不能太少。
得一点一点地试,直到动平衡机显示平衡了为止。
就像你调一个收音机的频道,得慢慢转旋钮,找到最合适的位置。
比如说有个修车的师傅,他要给一个汽车轮子做动平衡。
他把轮子装在动平衡机上,开动机器。
机器检测出轮子有点不平衡,显示出不平衡量是多少。
师傅根据这个结果,在轮子的一边加上了一个小铁片。
然后再转轮子,看看平衡了没有。
如果还不平衡,就再调整铁片的位置或者重量。
直到动平衡机显示平衡了,师傅才把轮子装回汽车上。
这样汽车跑起来就不会抖动了。
所以说啊,动平衡计算公式和方法虽然有点难,但掌握好了就能让东西转得更平稳。
咋样,现在知道动平衡咋算咋做了吧?。
动平衡校正的计算公式

动平衡校正的计算公式
1.校正重量的计算
校正重量(W)是指通过在旋转机械上增加或减少一定的质量来达到平
衡的重量。
校正重量可以通过下面的公式进行计算:
W=U*m/9.81
其中,W是校正重量(单位为kg),U是振动幅值(单位为µm),m
是不平衡质量(单位为g),9.81是重力加速度(单位为m/s²)。
2.平衡质量的计算
平衡质量是指通过校正重量来达到平衡的质量。
平衡质量可以通过下
面的公式进行计算:
M=W*R/(g*N)
其中,M是平衡质量(单位为kg),W是校正重量(单位为kg),R
是平衡半径(单位为m),g是重力加速度(单位为m/s²),N是旋转速
度(单位为r/min)。
3.平衡半径的计算
平衡半径是指平衡质量离旋转轴心的距离。
平衡半径可以通过下面的
公式进行计算:
R=J/M
其中,R是平衡半径(单位为m),J是转动惯量(单位为kg·m²),M是平衡质量(单位为kg)。
转动惯量的计算可以通过不同几何形状的旋转机械来计算,如转子为
圆柱体时,转动惯量可以通过下面的公式计算:
J=0.5*m*r²
其中,J是转动惯量(单位为kg·m²),m是转子质量(单位为kg),r是转子半径(单位为m)。
需要注意的是,动平衡校正的计算公式只是一种近似计算方法,在实
际应用中还需要结合实际情况进行修正和调整。
此外,平衡质量的计算还
需要考虑转子质量的分布情况,以及校正重量的安装位置等因素,以确保
校正效果的准确性和可靠性。
动平衡校正的计算公式
动平衡校正的计算公式动平衡校正是一种用于修正转子系统或旋转机械部件的重量不平衡的技术。
在旋转速度增加时,由于离心力的作用,未校正的转子或旋转机械部件会产生振动,从而引起机械故障、降低运行效率、增加功耗以及缩短设备的使用寿命。
为了消除或减轻振动引起的问题,动平衡校正可以通过增加或减少恰当位置的质量来实现平衡。
1.转子的不平衡力:不平衡力(N)= 质量(kg)× 加速度(m/s^2)2.不平衡力的矫正质量:矫正质量(kg)= 不平衡力(N)/ 加速度(m/s^2)3.矫正质量与平衡质量的转换:校正质量(g·mm)= 矫正质量(kg)× 千分之一(g/kg)× 激振器的离心距离(mm)4.不平衡质量与频率的关系:不平衡质量(g·mm)= 0.102 × 转子转速(rpm)× 振幅严重度(g)/ 运行频率(Hz)5.校正质量的转换:校正质量(g·cm)= 矫正质量(g·mm)/ 10动平衡校正的计算公式涉及到多个参数和单位的转换。
常常需要根据具体的工程要求和设备特点进行调整和修正。
值得注意的是,动平衡校正并不是一种精确的科学,通常只能达到满足设备正常运行要求的水平。
因此,在实际应用中需要结合经验和实际情况进行适当的调整和改进。
动平衡校正计算公式的应用可以通过现代化计算机软件来实现。
这些软件可以根据输入的参数和数据自动计算出平衡质量的大小和位置,并给出相应的校正方案。
此外,一些先进的动平衡设备还可以通过自动控制系统实时监测振动信号,并根据实际振动情况和校正效果来调整校正方案。
这样可以大大提高校正的精度和效率。
机械手册在动平衡计算公式(一)

机械手册在动平衡计算公式(一)机械手册在动平衡计算公式动平衡计算公式的重要性动平衡是机械设计中的重要环节,它能够减少机械运动时的震动和振动,提高机械的运行平稳性和使用寿命。
在机械手册中,动平衡计算公式是一些常用的公式和方法,可以帮助工程师快速准确地进行动平衡设计。
常用的动平衡计算公式以下是一些常用的动平衡计算公式:静不平衡质量计算公式静不平衡质量计算公式用于计算机械旋转部件的静不平衡质量,公式如下:M=e⋅m⋅r其中,M表示静不平衡质量,e表示平衡质量偏离要求的系数,m 表示短边静不平衡质量(通常为负数),r表示短边距离旋转中心的径向距离。
例如,如果平衡质量偏离要求的系数为,短边静不平衡质量为- kg,短边距离旋转中心的径向距离为 m,则静不平衡质量计算如下:M=⋅(−)⋅=− kg动不平衡质量计算公式动不平衡质量计算公式用于计算机械旋转部件的动不平衡质量,公式如下:M=m⋅r⋅e 1+l⋅er其中,M表示动不平衡质量,m表示短边静不平衡质量(通常为负数),r表示短边距离旋转中心的径向距离,l表示旋转部件的长度,e表示平衡质量偏离要求的系数。
例如,如果短边静不平衡质量为- kg,短边距离旋转中心的径向距离为 m,旋转部件的长度为 m,平衡质量偏离要求的系数为,则动不平衡质量计算如下:M=−⋅⋅1+⋅≈− kg总结机械手册中的动平衡计算公式是帮助工程师进行动平衡设计的重要工具。
上述列举的静不平衡质量计算公式和动不平衡质量计算公式是其中的两个常用公式,能够帮助工程师快速准确地计算静不平衡质量和动不平衡质量。
在实际应用中,工程师可以根据具体情况选择适用的公式进行计算,从而达到机械旋转部件的动平衡设计要求。
动平衡自动计算公式

得到
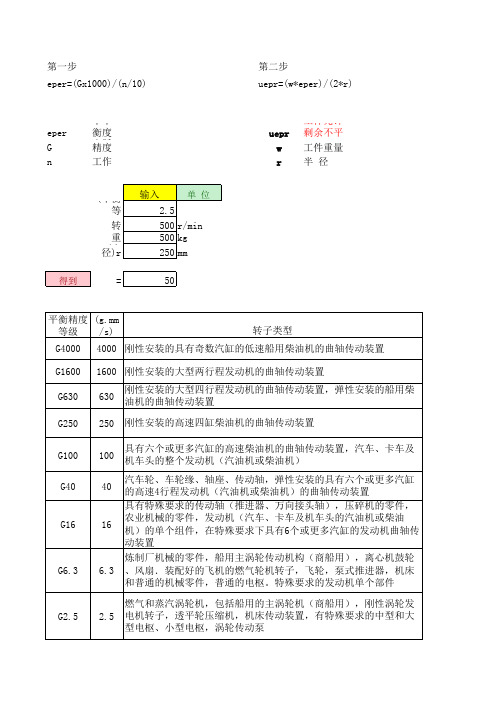
平衡精度 eω ①② 等级 /(mm/s) G4000 G1600 G630 G250 G100 G40 4000 1600 630 250 100 40
转子类型 刚性安装的具有奇数汽缸的低速船用柴油机的曲轴传动装置 刚性安装的大型两行程发动机的曲轴传动装置 刚性安装的大型四行程发动机的曲轴传动装置,弹性安装的船用柴油机 的曲轴传动装置 刚性安装的高速四缸柴油机的曲轴传动装置 具有六个或更多汽缸的高速柴油机的曲轴传动装置,汽车、卡车及机车 头的整个发动机(汽油机或柴油机) 汽车轮、车轮缘、轴座、传动轴,弹性安装的具有六个或更多汽缸的高 速4行程发动机(汽油机或柴油机)的曲轴传动装置 具有特殊要求的传动轴(推进器、万向接头轴),压碎机的零件,农业 机械的零件,发动机(汽车、卡车及机车头的汽油机或柴油机)的单个 组件,在特殊要求下具有6个或更多汽缸的发动机曲轴传动装置 炼制厂机械的零件,船用主涡轮传动机构(商船用),离心机鼓轮、风 扇.装配好的飞机的燃气轮机转子,飞轮,泵式推进器,机床和普通的 机械零件,普通的电枢。特殊要求的发动机单个部件 燃气和蒸汽涡轮机,包括船用的主涡轮机(商船用),刚性涡轮发电机 转子,透平轮压缩机,机床传动装置,有特殊要求的中型和大型电枢、 小型电枢,涡轮传动泵 磁带记录仪和唱机的传动装置,磨床传动装置,有特殊要求的小型电枢 精密磨床的传动轴,研磨盘和电枢,陀螺仪
第一步 eper=(Gx1000)/(n/10)
第二步 uepr=(w*eper)/(2*r)
eper G n
不平衡度 平衡精度等级,一般取6.3,如下表 工件工作转速
uepr w r
工件允许剩余不平衡量 工件重量 半径
输入
G n w r uepr=
6.3 此四项需 350 要输入数 292 据 500 3
动平衡计算公式范文
动平衡计算公式范文动态平衡计算公式是用来计算物体或系统在平衡状态下各力之间的关系的数学表达式。
动态平衡是指物体在平衡位置时,所有力的合力为零,力矩为零。
在物理学中,动态平衡的计算公式有以下几种。
1.力的平衡计算公式:F₁+F₂+F₃+...+Fₙ=0这个公式表示物体在平衡时,所有外力的合力为零。
力是矢量量,有大小和方向,所以在计算时需要将各个力的矢量分解成水平方向和竖直方向的分力,然后将各个方向的力进行相加,得到各方向的合力,最后将水平和竖直方向的合力进行矢量相加得到最终的合力。
2.力矩的平衡计算公式:M₁+M₂+M₃+...+Mₙ=0这个公式表示物体在平衡时,所有外力对平衡点的力矩的合力为零。
力矩是一个物理量,它表示力对于旋转中心的力臂。
通过将每个力对旋转中心的力臂进行计算,可以得到各个力的力矩。
最后将各个力的力矩进行相加得到最终的力矩。
3.重力平衡计算公式:mg₁ + mg₂ + mg₃ + ... + mgₙ = 0这个公式是在考虑重力的情况下,计算物体在平衡时重力的平衡关系。
m表示物体的质量,g表示重力加速度,mg表示物体受到的重力。
将各个重力进行相加得到最终的合力,然后将合力与其他力进行相加得到总的合力。
需要注意的是,上述的公式适用于平面上的物体和力。
如果涉及到三维空间,那么就需要对力和力矩进行矢量运算,考虑到力的方向和力矩的转动轴。
在实际应用中,根据具体情况,还可以结合牛顿第二定律(F = ma)或其他适用的物理定律来进行平衡的计算。
在复杂的情况下,可能需要利用向量叠加、坐标系变换等方法来求解平衡条件。
总之,动态平衡计算公式是用来计算物体或系统在平衡状态下各力之间的关系的数学表达式。
根据具体情况,可以选择适用于力、力矩或重力的平衡计算公式,并结合其他物理定律进行计算。
风机动静平衡及找正方法
风机动静平衡及找正方法-CAL-FENGHAI.-(YICAI)-Company One1转子找平衡一、静平衡与动平衡通风机转子的平衡校正,分为静平衡校正和动平衡校正两种。
一般的要求是:经过静平衡校正后,还须再作动平衡校正。
但对于符合某些条件的罢转子,也可仅作静平衡校正。
须作动平衡校正或仅作静平衡校正,取决于通风机的转速n,以及通风机叶片最大长度L与叶轮外圆直径D之比L/D的大小。
这种关系示于图5-8。
图中a线的下方为静平衡适用范围;b线的上方为动平衡适用范围;在a线和b线之间的区域,对于重要设备配套的通风机须作动平衡,对于一般通风机仅作静平衡即可。
必须指出,图中的规定只是概略值,实际上只要方法正确,在某些条件下以精密静平衡校正来代替动平衡校正,是可以取得良好的结果的。
例如,对于叶轮直径不大于0.6~1米,叶轮宽度小于直径一半的转子的动不平衡度是不大的,在检修中采用简单的动平衡校正方法,很难获得满意的结果,若作精密的静平衡校正,反可获得良好的结果。
作精密的静平衡校正时,是将叶轮、皮带轮等分别作平衡校正,如果通风机有两个叶轮,也分别作校正。
待全部校正部件装配后,再作最后一次的静平衡校正。
图5-8 静平衡与动平衡的分界??应该说明,在任何情况下进行平衡校正以前,必须先测量一下叶轮的径向跳动和端面跳动。
只有在跳动符合要求时,方可进行平衡校正工作。
通风机的许用不平衡度M(克力·厘米)是以所平衡的转子重量G(公斤力)和精密度ρ(微米)的乘积来表示的。
因此,许用不平衡度也叫做“重径积”。
这种关系如下式所示。
式中下角字母j表示静平衡,d表示动平衡。
例如,如时G=60公斤力,ρj=50微米则 M j=0.1X50X60=300克力·厘米通风机许用不平衡度的合理制定,需要考虑很多因素,一般都由通风机的设计者确定。
对于检修部门来说,如果没有通风机产品证明书所规定的数值,可参考图5-9,查得精密度ρ后,用公式(6-1)或公式(6-2)计算出许用不平衡度。
动平衡相关计算

不平衡量的简化计算公式 m=9549MG/rxn
M-转子质量 单位(Kg) G-精度等级选用 r-校正半径 单位(mm) n-工件的工作转速 单位(rpm) m-不平衡合格量 单位(g)
单侧重量:
备注:m为总不平衡量。
具体数据
M G r n m
N
S
S = 27.3 x 1/N
S - 跑偏(Run out) N - 工件的工作转速 单位(rpm) V1 - 适用等级的速度(mm/s) Run out N≤450 rpm, If (N≤450 rpm).S≤0.43 计算结果 输入数值 注意事项
计算结果 输入数值 注意事项
g/side
2585 2.5 170 579 626.947196
g/side = m/2
313.473598
跑偏(Run out)计算公式
BALANCING (动平衡等级及速度) 1.Q(等级)= 1.0 2.Q(等级) = 1.4 3.Q(等级)= 1.6 4.Q(等级)= 2.5 5.Q(等级)= 4.0 6.Q(等级) = 6.3 V1=2.8mm/second V1=2.8mm/second V1=2.8mm/second V1=4.5mm/second V1=7.1mm/second V1=11.2mm/second Smax.=0.17 Smax.=0.17 Smax.=0.17 Smax.=0.27 Smax.=0.43 Smax.=0.68 800 800 800 800 0.09555 0.1535625 0.2422875 0.3822
转子动平衡原理及计算
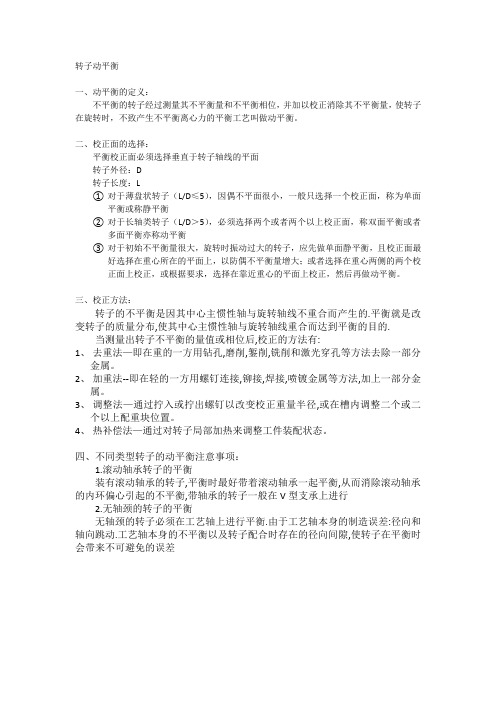
转子动平衡一、动平衡的定义:不平衡的转子经过测量其不平衡量和不平衡相位,并加以校正消除其不平衡量,使转子在旋转时,不致产生不平衡离心力的平衡工艺叫做动平衡。
二、校正面的选择:平衡校正面必须选择垂直于转子轴线的平面转子外径:D转子长度:L①对于薄盘状转子(L/D≤5),因偶不平面很小,一般只选择一个校正面,称为单面平衡或称静平衡②对于长轴类转子(L/D>5),必须选择两个或者两个以上校正面,称双面平衡或者多面平衡亦称动平衡③对于初始不平衡量很大,旋转时振动过大的转子,应先做单面静平衡,且校正面最好选择在重心所在的平面上,以防偶不平衡量增大;或者选择在重心两侧的两个校正面上校正,或根据要求,选择在靠近重心的平面上校正,然后再做动平衡。
三、校正方法:转子的不平衡是因其中心主惯性轴与旋转轴线不重合而产生的.平衡就是改变转子的质量分布,使其中心主惯性轴与旋转轴线重合而达到平衡的目的.当测量出转子不平衡的量值或相位后,校正的方法有:1、去重法—即在重的一方用钻孔,磨削,錾削,铣削和激光穿孔等方法去除一部分金属。
2、加重法--即在轻的一方用螺钉连接,铆接,焊接,喷镀金属等方法,加上一部分金属。
3、调整法—通过拧入或拧出螺钉以改变校正重量半径,或在槽内调整二个或二个以上配重块位置。
4、热补偿法—通过对转子局部加热来调整工件装配状态。
四、不同类型转子的动平衡注意事项:1.滚动轴承转子的平衡装有滚动轴承的转子,平衡时最好带着滚动轴承一起平衡,从而消除滚动轴承的内环偏心引起的不平衡,带轴承的转子一般在V型支承上进行2.无轴颈的转子的平衡无轴颈的转子必须在工艺轴上进行平衡.由于工艺轴本身的制造误差:径向和轴向跳动.工艺轴本身的不平衡以及转子配合时存在的径向间隙,使转子在平衡时会带来不可避免的误差五、转子不平衡量的计算方法:1、计算转子的允许不平衡度(率)Eper=(G*1000)/(n/10)式中:Eper——允许不平衡度单位μmG——不平衡精度等级一般取6.3n——工作转速单位r/min例如:某工件工作转速1400r/min平衡精度等级取6.3,则Eper=(GX1000)/(n/10)= (6.3X1000)/(1400/10)=45μm2、计算允许残余不平衡量m=(Eper*M)/(r*2)式中:m——允许残余不平衡度单位gM——工件旋转质量单位kgr——工件半径单位mm例如:工件质量20kg,半径60mm双面平衡,故计算每个平衡面的允许的剩余不平衡量为m=(Eper*M)/(r*2)=(45x20)/(60x2)=7.5g3、转子平衡品质——衡量转子平衡优劣程度的指标G=Eper*ω/1000式中:G——转子平衡品质mm/s 从G0.4-G4000分11级;Eper——转子允许的不平衡度g.mm/k 或mm/s或转子质量偏心距μmω——相应于转子最高工作转速的角速度ω=2πn/60≈n/104、最小可达剩余不平衡量(umar)——单位g.m,平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标,当该指标用不平衡度表示时,称为最小可达或剩余不平衡度(单位g.mm/kg)5、不平衡量减少率(URR)——经过一次平衡校正所减少的不平衡量与初始不平衡量之比值,他是衡量平衡机效率的性能指标,以百分数表示:URR(%)=(U1-U2)/U1*100式中:U1为初始不平衡量;U2为一次平衡校正后的剩余不平衡量6、校验转子——为校验平衡机性能而设计的刚性转子,其质量、大小、尺寸均为有规定,分立式和卧式两种,立式转子质量为1.1、3.5、11、35、110kg,卧式转子质量为0.5、1.6、5、16、50、160、500kg7、不平衡国偶干扰比——单面平衡机抑制不平衡力偶影响的性能指标。
动平衡自动计算公式

第一步 eper=(Gx 1000)/(n /10)
第二步 uepr=(w* eper)/(2 *r)
eper
G n
不平衡 度 平衡精 度等 级,一 般取 6.3,如 工件工 作转速
Hale Waihona Puke uepr工件允许 剩余不平 衡量
w
工件重量
r
半径
输入 得到
G n w r
uepr=
6.3 410 85 175
此四项需 要输入数 据
37.31707
平衡精度 eω①② 等级 /(mm/s)
转子类型
G4000 G1600
4000 刚性安装的具有奇数汽缸的低速船用柴油机的曲轴传动装置 1600 刚性安装的大型两行程发动机的曲轴传动装置
G630
刚性安装的大型四行程发动机的曲轴传动装置,弹性安装的船用柴油机 630 的曲轴传动装置
G250 G100 G40
G16
刚性安装的高速四缸柴油机的曲轴传动装置 250
具有六个或更多汽缸的高速柴油机的曲轴传动装置,汽车、卡车及机车 100 头的整个发动机(汽油机或柴油机)
汽车轮、车轮缘、轴座、传动轴,弹性安装的具有六个或更多汽缸的高 40 速4行程发动机(汽油机或柴油机)的曲轴传动装置
具有特殊要求的传动轴(推进器、万向接头轴),压碎机的零件,农业 机械的零件,发动机(汽车、卡车及机车头的汽油机或柴油机)的单个 16 组件,在特殊要求下具有6个或更多汽缸的发动机曲轴传动装置
G6.3
G2.5 G1 G0.4
炼制厂机械的零件,船用主涡轮传动机构(商船用),离心机鼓轮、风 扇.装配好的飞机的燃气轮机转子,飞轮,泵式推进器,机床和普通的 6.3 机械零件,普通的电枢。特殊要求的发动机单个部件
转子动平衡计算标准

转子动平衡的计算标准分为以下两种情况:
针对已经确定了转子平衡等级的情况,平衡质量的计算公式为:m=m'G1G2*G3,其中m'为初始不平衡量,G1、G2、G3分别为转子的平衡精度等级。
对于未确定平衡等级的转子,需要先进行初始平衡,即通过静平衡法或其他方法使得转子在静止状态下达到平衡。
然后再进行振动信号的测量,通过测量结果进行平衡质量的分析与计算。
在计算过程中,需要注意振动信号的测量需要使用振动传感器进行测量,常见的振动参数有振动加速度、振动速度和振动位移。
同时,对于不同等级的平衡精度要求,其允许不平衡量计算公式不同。
例如,允许不平衡量的计算公式为:m=m'G1G2*G3,其中m'为允许不平衡量,G1、G2、G3分别为转子的平衡精度等级。
总之,转子动平衡的计算标准需要根据具体情况来确定,包括转子的平衡等级、振动参数以及平衡精度要求等因素。
风机动静平衡及找正方法

转子找平衡一、静平衡与动平衡通风机转子的平衡校正,分为静平衡校正和动平衡校正两种。
一般的要求是:经过静平衡校正后,还须再作动平衡校正。
但对于符合某些条件的罢转子,也可仅作静平衡校正。
须作动平衡校正或仅作静平衡校正,取决于通风机的转速n,以及通风机叶片最大长度L与叶轮外圆直径D之比L/D的大小。
这种关系示于图5-8。
图中a线的下方为静平衡适用范围;b线的上方为动平衡适用范围;在a线和b线之间的区域,对于重要设备配套的通风机须作动平衡,对于一般通风机仅作静平衡即可。
必须指出,图中的规定只是概略值,实际上只要方法正确,在某些条件下以精密静平衡校正来代替动平衡校正,是可以取得良好的结果的。
例如,对于叶轮直径不大于0.6~1米,叶轮宽度小于直径一半的转子的动不平衡度是不大的,在检修中采用简单的动平衡校正方法,很难获得满意的结果,若作精密的静平衡校正,反可获得良好的结果。
作精密的静平衡校正时,是将叶轮、皮带轮等分别作平衡校正,如果通风机有两个叶轮,也分别作校正。
待全部校正部件装配后,再作最后一次的静平衡校正。
图5-8 静平衡与动平衡的分界应该说明,在任何情况下进行平衡校正以前,必须先测量一下叶轮的径向跳动和端面跳动。
只有在跳动符合要求时,方可进行平衡校正工作。
通风机的许用不平衡度M(克力·厘米)是以所平衡的转子重量G(公斤力)和精密度ρ(微米)的乘积来表示的。
因此,许用不平衡度也叫做“重径积”。
这种关系如下式所示。
式中下角字母j表示静平衡,d表示动平衡。
例如,如时G=60公斤力,ρj=50微米则 M j=0.1X50X60=300克力·厘米通风机许用不平衡度的合理制定,需要考虑很多因素,一般都由通风机的设计者确定。
对于检修部门来说,如果没有通风机产品证明书所规定的数值,可参考图5-9,查得精密度ρ后,用公式(6-1)或公式(6-2)计算出许用不平衡度。
二、静平衡的校正方法转子的静不平衡度是以精密度ρj,来衡量的。
动平衡自动计算公式 2016-11-23
第二步 uepr=(w*eper)/(2*r)
eper G n
不平衡度 平衡精度等级,一般取6.3,如下表 工件工作转速 输入
单 位
uepr w r
工件允许剩余不平衡量 工件重量 半 径
(平衡等级)G (工作转速)n (工件重量)w (半径)r
得到
2.5 500 r/min 500 kg 250 mm 50
uepr =
平衡精度 (g.mm 等级 /s) G4000 G1600 G630 G250 G100 G40
转子类型
4000 刚性安装的具有奇数汽缸的低速船用柴油机的曲轴传动装置 1600 刚性安装的大型两行程发动机的曲轴传动装置 630 250 100 40 刚性安装的大型四行程发动机的曲轴传动装置,弹性安装的船用柴 油机的曲轴传动装置 刚性安装的高速四缸柴油机的曲轴传动装置 具有六个或更多汽缸的高速柴油机的曲轴传动装置,汽车、卡车及 机车头的整个发动机(汽油机或柴油机) 汽车轮、车轮缘、轴座、传动轴,弹性安装的具有六个或更多汽缸 的高速4行程发动机(汽油机或柴油机)的曲轴传动装置 具有特殊要求的传动轴(推进器、万向接头轴),压碎机的零件, 农业机械的零件,发动机(汽车、卡车及机车头的汽油机或柴油 机)的单个组件,在特殊要求下具有6个或更多汽缸的发动机曲轴传 动装置 炼制厂机械的零件,船用主涡轮传动机构(商船用),离心机鼓轮 、风扇.装配好的飞机的燃气轮机转子,飞轮,泵式推进器,机床 和普通的机械零件,普通的电枢。特殊要求的发动机单个部件 燃气和蒸汽涡轮机,包括船用的主涡轮机(商船用),刚性涡轮发 电机转子,透平轮压缩机,机床传动装置,有特殊要求的中型和大 型电枢、小型电枢,涡轮传动泵
动平衡自动计算公式 2016-11-23
50 平衡等级(G)
工作转速(n)
2.5 500
第一步 eper=(Gx1000)/(n/10)
第二步 uepr=(w*eper)/(2*r)
eper G n
不平衡度 平衡精度等级,一般取6.3,如下表 工件工作转速 输入
单 位
uepr w r
工件允许剩余不平衡量 工件重量 半 径
(平衡等级)G (工作转速)n (工件重量)w (半径)r
得到
2.5 500 r/min 500 kg 250 mm 50
G16
16
G6.3Biblioteka 6.3G2.52.5
G1 G0.4
1 0.4
磁带记录仪和唱机的传动装置,磨床传动装置,有特殊要求的小型 电枢 精密磨床的传动轴,研磨盘和电枢,陀螺仪
第三步 辊子重量 =
允用不平衡量
50 平衡等级(G)
2.5 500 500 500
工作转速(分/转) 重量 W (公斤) 直径
不平衡度
uepr =
平衡精度 (g.mm 等级 /s) G4000 G1600 G630 G250 G100 G40
转子类型
4000 刚性安装的具有奇数汽缸的低速船用柴油机的曲轴传动装置 1600 刚性安装的大型两行程发动机的曲轴传动装置 630 250 100 40 刚性安装的大型四行程发动机的曲轴传动装置,弹性安装的船用柴 油机的曲轴传动装置 刚性安装的高速四缸柴油机的曲轴传动装置 具有六个或更多汽缸的高速柴油机的曲轴传动装置,汽车、卡车及 机车头的整个发动机(汽油机或柴油机) 汽车轮、车轮缘、轴座、传动轴,弹性安装的具有六个或更多汽缸 的高速4行程发动机(汽油机或柴油机)的曲轴传动装置 具有特殊要求的传动轴(推进器、万向接头轴),压碎机的零件, 农业机械的零件,发动机(汽车、卡车及机车头的汽油机或柴油 机)的单个组件,在特殊要求下具有6个或更多汽缸的发动机曲轴传 动装置 炼制厂机械的零件,船用主涡轮传动机构(商船用),离心机鼓轮 、风扇.装配好的飞机的燃气轮机转子,飞轮,泵式推进器,机床 和普通的机械零件,普通的电枢。特殊要求的发动机单个部件 燃气和蒸汽涡轮机,包括船用的主涡轮机(商船用),刚性涡轮发 电机转子,透平轮压缩机,机床传动装置,有特殊要求的中型和大 型电枢、小型电枢,涡轮传动泵
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动平衡校正的计算公式标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
不平衡量的简化计算公式:
m=9549MG/r×n
M——转子质量单位(kg)
G——精度等级选用
r——校正半径单位(mm)
n——工件的工作转速单位(rpm)
m——不平衡合格量单位(g)
允许不平衡量的计算公式为:
式中mper为允许不平衡量,单位是g;
M代表转子的自身重量,单位是kg;
G代表转子的平衡精度等级,单位是mm/s;
r 代表转子的校正半径,单位是mm;
n 代表转子的转速,单位是rpm。
举例如下:
如一个电机转子的平衡精度要求为级,转子的重量为0.2kg,转子的转速为1000rpm,校正
半径20mm,
则该转子的允许不平衡量为:
因电机转子一般都是双面校正平衡,故分配到每面的允许不平衡量为0.3g。
在选择平衡机之前,应先考虑转子所要求的平衡精度。
转子允许不平衡量的计算
允许不平衡量的计算公式为:
为允许不平衡量,单位是g;
式中m
per
M代表转子的自身重量,单位是kg;
G代表转子的平衡精度等级,单位是mm/s;
r 代表转子的校正半径,单位是mm;
n 代表转子的转速,单位是rpm。
举例如下:
如一个电机转子的平衡精度要求为级,转子的重量为0.2kg,转子的转速为1000rpm,校正
半径20mm,
则该转子的允许不平衡量为:
因电机转子一般都是双面校正平衡,故分配到每面的允许不平衡量为0.3g。
在选择平衡机之前,应先考虑转子所要求的平衡精度。