大电流马达驱动芯片
马达正反转驱动芯片
特点:⏹ 低导通电阻; ⏹ 低静态工作电流; ⏹ 内置过温保护电路; ⏹ 待机时关闭电荷泵电路 ⏹ 最低至1.8V 的工作电压; ⏹ 控制和驱动集成于单片IC 之中; ⏹ 具有1A 持续电流,2A 峰值电流输出; ⏹ TTL/CMOS 输出电平兼容,可直接连CPU;描述:L7010R 是为控制和驱动直流马达设计的两通道功率MOSFET 的H 桥集成电路器件,它可以控制马达正转,反转并且具有刹车功能,用来代替传统分立器件驱动电路,使外围器件减少,整机可靠性提高。
该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出能直接驱动马达,它具有较大的电流驱动能力,每通道能通过2A 的峰值电流,同时它具有较低的导通电阻;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流马达、步进马达或开关功率管的使用上安全可靠。
L7010R 被广泛应用于玩具马达驱动、数码相机马达驱动,步进马达驱动,脉冲电磁阀门驱动和智能锁具马达驱动等电路上。
管脚定义:符号 功能 符号功能 OA A 路输出 GND 地线 VCC 电源 IA A 路输入VCC 电源 IB B 路输入 OBB 路输出GND地线塑料封装(SOP8)L7010R系统框图:绝对最大值:符号 参数 最小值 最大值 单位 VCC DC 电源电压 -0.3 7.0 V VIN 输入电压 -0.3 VDD+0.3V PD 功耗 -- 1 W TA 工作温度 -10 75 ℃ TJ 结温 -- 150 ℃ TS储存温度-55150℃推荐工作条件(TA=25℃)符号 参数 最小值 典型 最大值 单位 VCC DC 电源电压 1.8 -- 5.50 V VIN 输入电压 2.2 -- 5.50 V VIH 最低输入高电压 0.8VDD -- VDD+0.3 V VIL 最高输入低电压 -0.3 -- 0.4VDDV IL 输入漏电流 -1 -- 1 µA IDD 工作电流 -- 1 2 mA ISTB待机电流--< 0.110µAOA OBIA VCCGNDIB电气特性(TA=25≈75℃)符号 参数 条件 最小值 典型 最大值 单位 IDD1 VDD引脚电流 VDD=5V,with all control pins at high -- 1 2 mA IDD2 VDD引脚电流 VDD=5V,with all control pins at low -- 0.1 10 µA IM VDM引脚电流 TA=25℃, with all control pins at low -- 0.2 10 µARON H桥导通电阻 IM=0.5A, VDD=VM=5V,TA=25℃, Rload=8Ω.-- 1.5 3Ω IOUT H桥峰值电流 Rload=0Ω, VDD=VM=5V -- 2 -- A VIH 控制脚高电平 VDDx0.8 -- -- V VIL 控制脚低电平 -- -- VDDx0.4 V tOFFC 电荷泵关断时间 VDD=VM=5V, IM=0.5A -- 0.015 1 ms tONH H桥接通时间 -- -- 10 µs tOFFH H桥关断时间 -- -- 5 µs应用电路图:逻辑关系表:输入信号(IA/IB) 电路状态H L M 正转L H M 反转H H M 刹车L L 待机模式。
8个达林顿管阵列芯片
8个达林顿管阵列芯片
达林顿管阵列芯片是一种集成了多个达林顿管的芯片,用于控制大电流驱动的装置。
以下是一些常见的8个达林顿管阵列芯片:
1. ULN2803:8位达林顿管阵列芯片,可用于驱动继电器、步进电机等设备。
2. ULN2003:8位达林顿管阵列芯片,常用于驱动小型电机、LED 显示屏等。
3. TPIC6B595:8位达林顿管阵列芯片,可用于驱动大功率负载,具有过载保护功能。
4. ULQ2803:8位达林顿管阵列芯片,适用于控制继电器、步进电机等高电流负载。
5. ULN2804:8位达林顿管阵列芯片,常用于驱动电流较大的负载。
6. SN754410:8位双向达林顿管阵列芯片,可用于驱动直流电机、步进电机等。
7. TIP120:8位达林顿管阵列芯片,适用于高电流应用,如驱动电机、灯光等。
8. L293D:8位双向达林顿管阵列芯片,常用于控制直流电机、步进电机等。
这些芯片都可以通过控制输入信号来控制相应的达林顿管输出,实现对大电流负载的驱动。
IAD3988中文 A3988 马达驱动IC
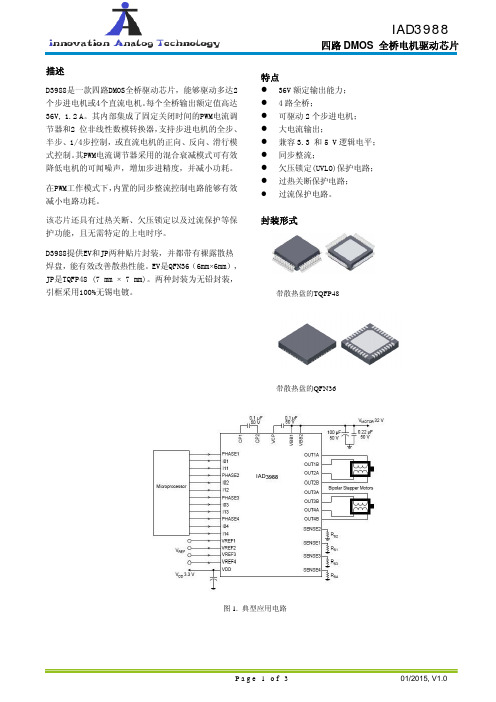
D 3988 四路DMOS 全桥电机驱动芯片图1. 典型应用电路描述D3988是一款四路DMOS全桥驱动芯片,能够驱动多达2个步进电机或4个直流电机。
每个全桥输出额定值高达36V, 1.2 A。
其内部集成了固定关闭时间的PWM电流调节器和2 位非线性数模转换器,支持步进电机的全步、半步、1/4步控制,或直流电机的正向、反向、滑行模式控制。
其PWM电流调节器采用的混合衰减模式可有效降低电机的可闻噪声,增加步进精度,并减小功耗。
在PWM工作模式下,内置的同步整流控制电路能够有效减小电路功耗。
该芯片还具有过热关断、欠压锁定以及过流保护等保护功能,且无需特定的上电时序。
D3988提供EV和JP两种贴片封装,并都带有裸露散热焊盘,能有效改善散热性能。
EV是QFN36(6mm ×6mm),JP是TQFP48 (7 mm × 7 mm)。
两种封装为无铅封装,引框采用100%无锡电镀。
特点● 36V 额定输出能力; ● 4路全桥; ● 可驱动2个步进电机; ● 大电流输出; ● 兼容3.3 和5 V 逻辑电平; ● 同步整流; ● 欠压锁定(UVLO)保护电路; ● 过热关断保护电路;● 过流保护电路。
封装形式 带散热盘的TQFP48 带散热盘的QFN36 IAD订购信息Part Number Package Packing IAD3988PQT 48 pin TQFP with exposed thermal pad 2500 pieces per trayIAD3988SQTR 36 pin QFN with exposed thermal pad 3000 pieces per reel引脚排列图QFN36LQFP48引脚列表QFN36 LQFP48 Pin Name Pin Description2 3 OUT1A DMOS Full-Bridge 1 Output A3 4 SENSE1 Sense Resistor Terminal for Bridge 14 5 OUT1B DMOS Full-Bridge 1 Output B5 6 VBB1 Load Supply Voltage6 8 OUT2B DMOS Full-Bridge 2 Output B7 9 SENSE2 Sense Resistor Terminal for Bridge 28 10 OUT2A DMOS Full-Bridge 2 Output A9 13 PHASE4ControlInput10 14 PHASE3 Control Input11 15 VDD Logic Supply Voltage12 16 VREF1AnalogInput 13 17 VREF2AnalogInput 14 18 VREF3AnalogInput 15 19 VREF4AnalogInput16 20 GND Ground17 21 PHASE2 Control Input18 22 PHASE1ControlInput19 24 I14 Control Input20 27 OUT4A DMOS Full-Bridge 4 Output A21 28 SENSE4 Sense Resistor Terminal for Bridge 422 29 OUT4B DMOS Full-Bridge 4 Output B23 31 VBB2 Load Supply Voltage24 32 OUT3B DMOS Full-Bridge 3 Output B25 33 SENSE3 Sense Resistor Terminal for Bridge 326 34 OUT3A DMOS Full-Bridge 3 Output A27 37 I13 Control Input28 38 I12 Control Input29 39 I11 Control Input30 40 GND Ground31 42 VCP Reservoir Capacitor Terminal32 43 CP1 Charge Pump Capacitor Terminal33 44 CP2 Charge Pump Capacitor Terminal34 45 I01 Control Input35 46 I02 Control Input36 47 I03 Control Input1 48 I04 Control Input1, 2, 7, 11, 12, 23, 25, 26, 30,35, 36, 41NC No ConnectPAD Exposed pad for enhanced thermal perfor-mance. Should be soldered to the PCB.。
马达驱动芯片
马达驱动芯片马达驱动芯片(Motor driver chip)是一种用于控制直流电机或步进电机的集成电路芯片。
它将外部控制信号转化为驱动电流,从而控制电机的转动。
马达驱动芯片在电动工具、汽车、机器人、家电等众多领域都有广泛的应用。
它是电机系统中必不可少的一部分,为电机提供良好的电压和电流,保证其正常运行。
马达驱动芯片通常由功率模块和控制模块组成。
功率模块负责将控制信号转化为驱动电流,并为电机提供足够的功率,以实现电机的转动。
控制模块则负责接收外部控制信号,并根据信号的要求来调节功率模块的工作状态。
马达驱动芯片的基本功能包括电流调节、速度控制、方向控制和保护功能。
电流调节是马达驱动芯片最主要的功能之一。
它能够根据控制信号的输入来自动调节输出电流的大小,以满足电机的需求。
马达驱动芯片通常采用PWM调节电流的方式,通过调节信号的占空比来控制输出电流的大小。
这样可以实现对电机的精确控制,使其能够在不同负载和工作环境下都能正常运行。
速度控制是马达驱动芯片的另一个主要功能。
它能够根据控制信号的输入来调节电机的转速。
马达驱动芯片通常采用速度闭环控制的方式,通过与编码器或速度传感器的配合,实现对电机转速的反馈监测和调节。
这样可以使电机在不同的工作要求下都能够保持稳定的转速。
方向控制是马达驱动芯片的另一个重要功能。
它能够根据控制信号的输入来改变电机的运动方向。
马达驱动芯片通常通过控制电机连接的电极或继电器来实现方向的切换,从而控制电机的正转和反转。
马达驱动芯片还具有一些保护功能,以保证电机的安全和可靠运行。
常见的保护功能包括过流保护、过热保护、过压保护、欠压保护和短路保护等。
这些保护功能可以有效地防止电机过载、过热、过压或短路等情况的发生,从而保护电机和驱动芯片的安全。
总之,马达驱动芯片是电机系统中非常重要的一部分。
它能够将外部信号转化为驱动电流,控制电机的转动。
通过电流调节、速度控制、方向控制和保护功能等,它可以实现对电机的精确控制和保护,保证电机的安全和可靠运行。
马达驱动芯片大全

不可调
0.8欧 160度
0.4欧 150度 有
1欧 有 有
1.5欧 有 没有 没有 没有
有 有 有 有
AHX2021限流控制的优势 1)与其他玩具马达驱动IC比较,达到限制电流后,能够保持恒流输出,保护芯 片和马达不会烧毁,同时电流恒定,使马达维持充沛的动力。 2)限流可以调节,能够满足多种马达的限流要求。 3)在驱动转向马达的情况下,堵转达到限流后,堵转电流不随电源电压变化, 更省电。通过调整限流电阻,很容易匹配各种马达和电池。 4) 在恒流情况下,可进调整PWM频率,从而改善整体EMI干扰。
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021、AHX2023与其他玩具马达驱动芯片的比较
AHX2021 AHX2023 DX5065 KX5008 GPY006A PJ701R PJ9110 PJ9120 PJ9130 RZ7881 RZ7888 RZ7889 RZ7889D
1A 2A 否
0.8A 1.5A 否
3A
3A
1A
2A
3A
3A
1.5A
4A
5A5.Βιβλιοθήκη A否否是是
否
否
否
否
PWM调制 恒流
有
没有,达 到峰值电 流,减小 电流。
没有,依 靠过热限 制电流。 有
没有
没有
没有
没有
没有
没有
有
有
有
限流可调节 内阻 过热保护
外置电路 调节
外置电路 调节
不可调
不可调
不可调
不可调
不可调
工作范围 最大驱动电 流 峰值电流 是否外界功 率管 限流控制
TIDRV8833马达驱动解决方案

TIDRV8833马达驱动解决方案首先要使用DRV8833马达驱动,首先需要连接好电机和驱动芯片。
DRV8833芯片与电机的接线非常简单,只需要将电机的两个线连接到DRV8833的OUT1和OUT2引脚上即可。
此外,还需要将电源电压与DRV8833芯片的VCC引脚连接,并连接好一个逻辑电平来控制DRV8833的IN1和IN2引脚,用于控制电机的正向和反向旋转。
在连接完成后,还需要将DRV8833芯片的GND引脚与电路的地引脚连接。
接下来是控制电机的方案。
DRV8833芯片可以通过IN1和IN2引脚来控制电机的旋转方向和速度。
通过给IN1和IN2引脚施加不同的逻辑电平,可以实现电机的正向、反向旋转以及停止。
为了控制IN1和IN2引脚的逻辑电平,可以使用微控制器或单片机来生成PWM信号,并通过逻辑门或三态门来控制IN1和IN2引脚。
例如,可以使用Arduino开发板配合PWM引脚和数模转换器,来生成PWM信号并控制电机的速度。
在控制电机方向时,只需要将IN1和IN2引脚分别设置为逻辑0和逻辑1,或逻辑1和逻辑0即可。
其中,逻辑0表示使能对应的H桥电流驱动输出,逻辑1表示禁用对应的H桥电流驱动输出。
在控制电机速度时,可以通过调整PWM信号的占空比来控制电机的转速。
占空比越大,电机转速越快;占空比越小,电机转速越慢。
此外,DRV8833还支持电流限制功能,可以通过设置驱动芯片上的一些引脚来限制电机的最大输出电流。
这对于保护电机和驱动芯片非常重要,防止电流过大而导致的损坏。
总结起来,TIDRV8833马达驱动的解决方案包括连接电机和驱动芯片,控制电机的方向和转速,并设置电流限制以保护电机和驱动芯片。
通过合理的设计和控制,可以实现对电机的精确控制和保护。
电机驱动芯片LMD18200原理及应用
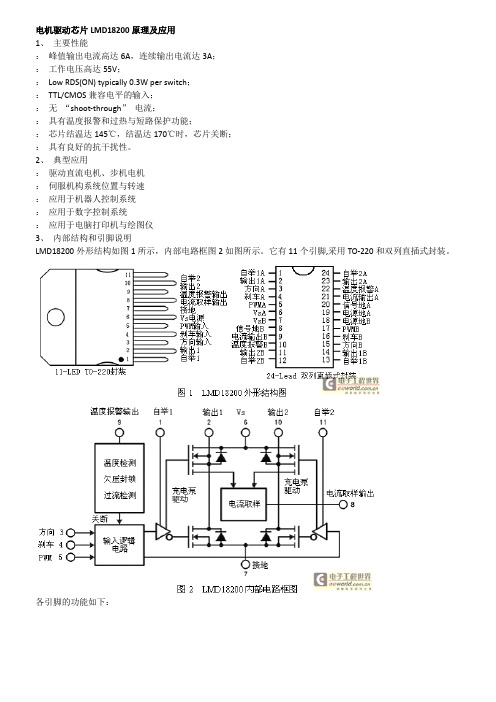
电机驱动芯片LMD18200原理及应用1、主要性能:峰值输出电流高达6A,连续输出电流达3A;:工作电压高达55V;:Low RDS(ON) typically 0.3W per switch;:TTL/CMOS兼容电平的输入;:无“shoot-through”电流;:具有温度报警和过热与短路保护功能;:芯片结温达145℃,结温达170℃时,芯片关断;:具有良好的抗干扰性。
2、典型应用:驱动直流电机、步机电机:伺服机构系统位置与转速:应用于机器人控制系统:应用于数字控制系统:应用于电脑打印机与绘图仪3、内部结构和引脚说明LMD18200外形结构如图1所示,内部电路框图2如图所示。
它有11个引脚,采用TO-220和双列直插式封装。
各引脚的功能如下:引脚名称功能描述LMD18200工作原理:内部集成了四个DMOS管,组成一个标准的H型驱动桥。
通过充电泵电路为上桥臂的2个开关管提供栅极控制电压,充电泵电路由一个300kHz左右的工作频率。
可在引脚1、11外接电容形成第二个充电泵电路,外接电容越大,向开关管栅极输入的电容充电速度越快,电压上升的时间越短,工作频率可以更高。
引脚2、10接直流电机电枢,正转时电流的方向应该从引脚步到引脚10;反转时电流的方向应该从引脚10到引脚2。
电流检测输出引脚8可以接一个对地电阻,通过电阻来输出过流情况。
内部保护电路设置的过电流阈值为10A,当超过该值时会自动封锁输出,并周期性的自动恢复输出。
如果过电流持续时间较长,过热保护将关闭整个输出。
过热信号还可通过引脚9输出,当结温达到145度时引脚9有输出信号。
4、典型应用LMD18200典型应用电路如图3所示。
LMD18200提供双极性驱动方式和单极性驱动方式。
双极性驱动是指在一个PWM周期里,电动机电枢的电压极性呈正负变化。
双极性可逆系统虽然有低速运行平稳性的优点,但也存在着电流波动大,功率损耗较大的缺点,尤其是必须增加死区来避免开关管直通的危险,限制了开关频率的提高,因此只用于中小功率直流电动机的控制。
FMRX2BMS 五功能马达驱动IC说明书

概述FMRX2BMS是为遥控汽车等玩具设计的专用单芯片解决方案,该芯片将传统方案的RX2接收解码芯片以及马达驱动芯片整合为单一芯片。
芯片内部集成两路H 桥驱动电路,可同时驱动转向电机以及前进后退电机。
单通道工作时,左转/右转通道用于驱动转向电机,最大持续输出电流达到1.5A,最大峰值输出电流达到2A。
前进/后退通道用于驱动前进后退电机,最大持续输出电流达到1.65A,最大峰值输出电流达到2.5A;双通道同时工作时,左转/右转通道持续输出0.8A的情况下,前进/后退通道能持续输出1.4A。
该芯片具备较宽的工作电压范围(VCC端供电从2V到7.5V),可覆盖2节干电池至5节干电池的应用。
该专用芯片内置过热保护电路。
驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,封装内部芯片的结温将会迅速升高,一旦超过设定值,内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。
内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
特性低静态工作电流;集成的H桥驱动电路;高度集成方案,集成RX2芯片和两个马达驱动芯片;内置2.6V稳压LDO电路;低导通内阻的功率MOSFET管;内置带迟滞效应的过热保护电路(TSD);封装形式:SOP-16典型应用2-5节AA/AAA干电池供电的玩具马达驱动;2-5节镍-氢/镍-镉充电电池供电的玩具马达驱动;1-2节锂电池供电的马达驱动引脚示意图及说明功能框图工作原理FMRX2BMS接收由TX2编码的高频调制信号经外围线路解码的串行码信号,由内部电路进行解码,产生一系列控制信号来控制前进、后退、左转、右转功能。
串行码是由结束码和功能码组成,一组为n+4个脉冲,即结束码为4个W2脉冲,功能码为n个W1脉冲。
其中W2为500Hz,频宽比为3/4,W1为1KHz,频宽比为1/2。
n不同数值分别表示不同的功能。
绝对最大额定值(TA=25℃)注:(1)1通道代表FORWARD和BACKWARD通道,2通道代表RIGHT和LEFT通道。
霍尔芯片TC276-277
7. 典型应用
VDD DO DOB GND
电源
保护二极管 电感1 电感2
图 10典型应用 注意:保护二极管是为了保护电感 1和电感 2在 VDD/GND反插的情况下不损坏
页码: 4/ 6
数据手册 2013年 10月 V1.0
8. 封装信息------TO94
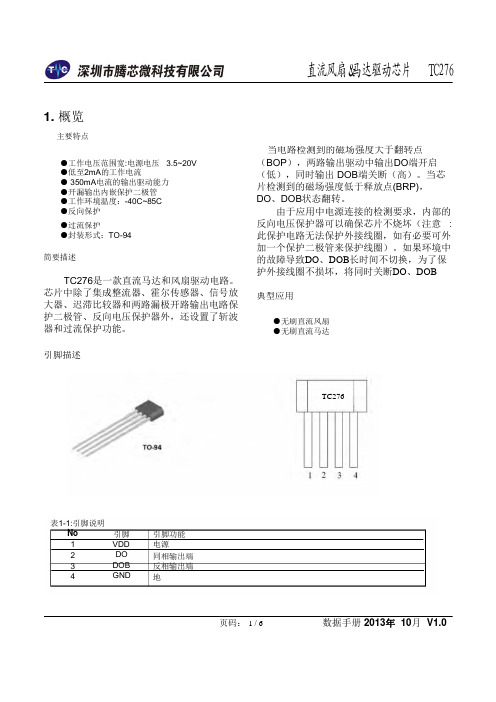
直流风扇&马达驱动芯片 TC276
页码: 5 / 6
典型应用
●无刷直流风扇 ●无刷直流马达
引脚描述
TC276
表1-1:引脚说明 No 1 2 3 4
引脚 VDD DO DOB GND
引脚功能 电源
同相输出端 反相输出端 地
页码: 1 / 6
数据手册 2013年 10月 V1.0
2. 功能框图
VDD
整流器
振荡器
斩
波
放
器
大
器
直流风扇&马达驱动芯片 TC276
下限 3.5
-
10 -50
典型
33 2 0.3 0.35 0.1 3 0.3 3
70
上限 20 4 0.6 10 10 1
10
单位 V V mA V V uA uS uS uS
50 Gauss -10 Gauss
Gauss
页码: 3 / 6
数据手册 2013年 10月 V1.0
直流风扇&马达驱动芯片 TC276
页码: 6 / 6
数据手册 2013年 10月 V1.0
当电路检测到的磁场强度大于翻转点 (BOP),两路输出驱动中输出DO端开启 (低),同时输出 DOB端关断(高)。当芯 片检测到的磁场强度低于释放点(BRP), DO、DOB状态翻转。
由于应用中电源连接的检测要求,内部的 反向电压保护器可以确保芯片不烧坏(注意 : 此保护电路无法保护外接线圈,如有必要可外 加一个保护二极管来保护线圈)。如果环境中 的故障导致DO、DOB长时间不切换,为了保 护外接线圈不损坏,将同时关断DO、DOB
tb6612fng用法

tb6612fng用法一、概述TB6612FNG是一款常用的马达驱动芯片,常用于电动工具、自动化设备、机器人等需要控制马达的场合。
它的主要功能是提供高效率、高转矩、宽电压范围的马达驱动,同时具有过电流保护等保护功能。
二、TB6612FNG的主要特点1.高效率:TB6612FNG能够提供高效稳定的马达驱动,降低能源的浪费。
2.高转矩:在低电压、低电流的情况下,TB6612FNG仍能提供足够的马达转矩。
3.宽电压范围:TB6612FNG适用于5V至36V的输入电压范围,能够适应不同的电源环境。
4.自动保护:具有过电流保护、过热保护等功能,能有效保护马达和驱动电路。
三、TB6612FNG的连接方式TB6612FNG一般会与电机和电感器连接。
其中电机需要使用适当的功率电阻和电容进行配置。
以下是一个基本的连接方式示例:*将电机与TB6612FNG的“电机”端口连接。
*将电感器的一端与TB6612FNG的“输入”端口连接,另一端连接电机。
*将电源通过TB6612FNG的“输出”端口提供给电机。
四、控制信号TB6612FNG需要使用两个控制信号:启动信号和停止信号。
启动信号可以通过一个高电平有效(例如5V)的启动信号端口提供,停止信号则通过一个低电平有效的停止信号端口提供。
一般情况下,电机转动时启动信号保持为高电平,停止时切换为低电平。
需要注意的是,正确的控制信号延迟设置也是非常重要的。
五、使用注意事项*TB6612FNG在初次使用时,需要先进行上电测试,确保其正常工作。
*在连接电机时,要确保电机的正负极与TB6612FNG的连接正确,避免短路。
*在设置电感器时,要确保电感器的值正确,以避免过电流或电机无法转动的情况。
*在使用过程中,如果发现电机转动不正常或出现异常声音,应该立即断开电源并检查电路。
*确保TB6612FNG的工作环境干燥、无尘,避免潮湿和金属粉尘对其造成损害。
六、总结总的来说,使用TB6612FNG需要一定的电子基础知识,以及对电机驱动和马达控制的理解。
马达驱动芯片与马达搭配方法

马达驱动芯片与马达搭配方法1. 马达驱动芯片的基本原理马达驱动芯片指的是一种功能强大、能够控制马达运转的集成电路。
它通常由一个或多个H桥驱动器组成,可以通过控制电流和电压的方式实现马达的正反转。
马达驱动芯片的主要作用是保护马达不受过流、过热及短路等问题的影响,同时可以使马达的运行更为平稳、快速、高效。
2. 马达驱动芯片的种类马达驱动芯片的种类较多,通常可分为直流马达驱动芯片、步进马达驱动芯片、无刷直流马达驱动芯片等多种。
其中,直流马达驱动芯片主要适用于大型的直流马达;步进马达驱动芯片适用于控制一些需要精密定位和控制的马达;无刷直流马达驱动芯片则适用于高转速、高效率的马达。
3. 马达与马达驱动芯片的搭配方法在使用马达时,我们通常需要选择一款适合的马达驱动芯片来配合使用,以提高马达的性能和稳定性。
以下是一些常用的马达与马达驱动芯片配合的方法:3.1 直流马达与直流马达驱动芯片搭配直流马达是一种最基本的电机,通常通过控制驱动电流和电压来控制转速。
直流马达驱动芯片通过PWM脉冲信号控制高低电平的占空比,从而控制电机的电流、电压输出和转速。
常用的直流马达驱动芯片有L298、L293D等。
3.2 步进马达与步进马达驱动芯片搭配步进马达的控制需要伺服控制器,步进马达驱动芯片则通过控制驱动脉冲来改变马达的运动。
每一次脉冲,马达的转动角度就会发生变化。
常用的步进马达驱动芯片有ULN2003、A4988等。
3.3 无刷直流马达与无刷直流马达驱动芯片搭配无刷直流马达是一种通过外置电子换向器实现网上管理的新型马达,它的特点是高转速、低功耗。
而在无刷直流马达的控制中,需要用到一款无刷直流马达驱动芯片,通过不同的信号脉冲控制换向器的切换,从而驱动无刷直流马达运行。
常用的无刷直流马达驱动芯片有DRV8312、ILQ615等。
4. 马达驱动芯片的应用马达驱动芯片广泛应用于各种电气设备中。
例如机器人、无人机、数控机床、电动自行车、工业自动化等领域。
mx612 直流电机驱动IC 马达驱动IC
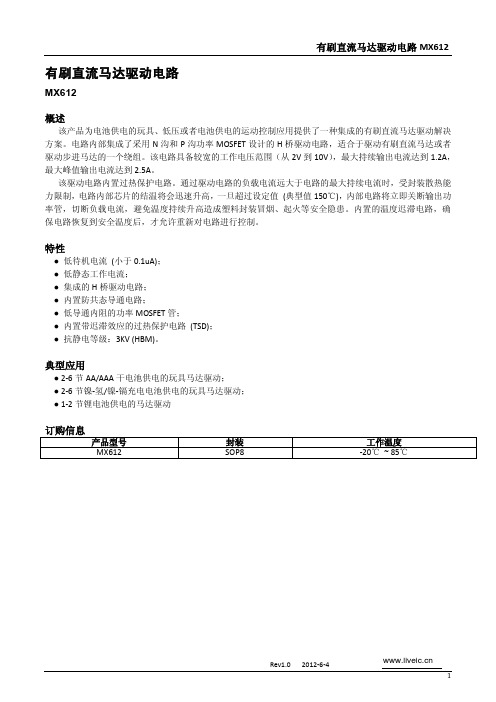
有刷直流马达驱动电路MX612 有刷直流马达驱动电路MX612概述该产品为电池供电的玩具、低压或者电池供电的运动控制应用提供了一种集成的有刷直流马达驱动解决方案。
电路内部集成了采用N沟和P沟功率MOSFET设计的H桥驱动电路,适合于驱动有刷直流马达或者驱动步进马达的一个绕组。
该电路具备较宽的工作电压范围(从2V到10V),最大持续输出电流达到1.2A,最大峰值输出电流达到2.5A。
该驱动电路内置过热保护电路。
通过驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,电路内部芯片的结温将会迅速升高,一旦超过设定值(典型值150℃),内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。
内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
特性●低待机电流(小于0.1uA);●低静态工作电流;●集成的H桥驱动电路;●内置防共态导通电路;●低导通内阻的功率MOSFET管;●内置带迟滞效应的过热保护电路(TSD);●抗静电等级:3KV (HBM)。
典型应用● 2-6节AA/AAA干电池供电的玩具马达驱动;● 2-6节镍-氢/镍-镉充电电池供电的玩具马达驱动;● 1-2节锂电池供电的马达驱动引脚排列 引脚定义功能框图注:D A JAT A表示电路工作的环境温度,θJA为封装的热阻。
150℃表示电路的最高工作结温。
(2)、电路功耗的计算方法: P =I2*R其中P为电路功耗,I为持续输出电流,R为电路的导通内阻。
电路功耗P必须小于最大功耗P D(3)、人体模型,100pF电容通过1.5KΩ 电阻放电。
注:(1)、逻辑控制电源VCC与功率电源VDD内部完全独立,可分别供电。
当逻辑控制电源VCC掉电之后,电路将进入待机模式。
(2)、持续输出电流测试条件为:电路贴装在PCB上测试,SOP8封装的测试PCB板尺寸为25mm*15mm。
电特性参数表测试原理图PMOS体二极管导通电压测试原理图NMOS体二极管导通电压测试原理图时间参数测试原理图时间参数定义MX612电特性曲线典型应用线路图图1 MX612典型应用线路图特别注意事项:图1中的功率电源VDD对地去耦电容(C1)容值应根据具体的应用调整,VDD电压越高,输出峰值电流越大,C1取值越大,但是电容C1的取值至少需要4.7uF。
3A双向直流电机(马达)驱动芯片 RZ7889D

输入真值表 2 脚 前进输入
H L H L
1 脚 后退输入 L H H L
5,6 脚 前进输出 H L L Open
7,8 脚 后退输出 L H L Open
极限值 参数
符号
数值
单位
电源电压 输出电流 工作温度 存储温度
Vcc
18
V
Iout
5.5
A
Top
-25~+85
ห้องสมุดไป่ตู้
℃
Tstg
-55~+150
℃
马达驱动电路
130
最大 15 2 7
5.9 0.3 6 0.7 100 150 4.5
单位 V uA mA
V V V V uA uA A
℃
应用线路
2
INF
1
INR
4
Vcc
I limit Control Thermal Shutdown
Gnd
3
Drive
Drive
OUTF
56
C1 0.1uF
Vcc
C2 470uF
马达驱动电路
RZ7889D
电路简述 RZ7889D 是一款 DC 双向马达驱动电路,它适用于玩具等类的电机驱动、
自动阀门电机驱动、电磁门锁驱动等。它有两个逻辑输入端子用来控制电机前进、 后退及制动。该电路具有良好的抗干扰性,微小的待机电流、低的输出内阻,同 时,他还具有内置二极管能释放感性负载的反向冲击电流。
特点
z 微小的待机电流,小于 2uA。 z 工作电压范围宽 3.0V~15V.. z 有紧急停止功能 z 有过热保护功能 z 有过流嵌流及短路保护功能 z 封装外形为: DIP8
AT8812-双通道2A马达驱动IC-CN_V1.2

高侧 FET 导通电阻
I O = 1A,TJ = 25°C
RDS(ON)
I O = 1A,TJ = 85°C
低侧 FET 导通电阻
I O = 1A,TJ = 25°C
I O = 1A,TJ = 85°C
IOFF
输出关断漏电流
AT8812
双通道 H 桥电机驱动芯片
MIN TYP MAX UNIT
6
8
mA
tWAKE 休眠唤醒时间
Internal PWM frequency VM =24V, 22Ω to GND, 10% to 90% VM =24V, 22Ω to GND, 10% to 90%
AT8812
双通道 H 桥电机驱动芯片
50
kHz
180
ns
150
ns
400
ns
Die temperature
一旦 PWM 斩波电流阈值达到,H 桥可以工作在两种不同的状态,快衰或者慢衰。 在快衰减模式,一旦 PWM 斩波电流阈值达到,H 桥反转输出状态,使得桥臂电流反方向流通。当桥臂电流 接近 0 时,H 桥被禁止,这样防止反向电流流通。快衰减电流路径在下图的示例 2 表示。 在慢衰减模式,通过使能两路低压侧的 FET,使得桥臂电流续流,下图示例 3 表示了慢衰减的电流路径。
225
251
276
5
V/V
1.88
us
nSLEEP inactive high to H-bridge on
50
200
us
Page 6 of 19
03/2017, V1.2
AT8812
双通道 H 桥电机驱动芯片
模块功能描述
直流无刷马达驱动芯片的工作原理和应用

直流无刷马达驱动芯片的工作原理和应用直流无刷马达(BLDC)是一种通过电子驱动器来控制转子位置和速度的电机。
它采用了无刷电机的特点,即无需使用碳刷和换向器,从而降低了摩擦和能量损耗,并提高了效率和可靠性。
而驱动芯片则是控制BLDC马达的关键组件之一,它负责接收控制信号并将其转化为驱动电流,从而实现对马达的控制。
BLDC马达的工作原理是基于磁场的相互作用。
马达内部有一个固定不动的部分称为定子,以及一个可以旋转的部分称为转子。
定子上分布着若干个线圈,称为绕组,通过通电产生磁场。
转子上则有若干个永磁体,它们的磁极分布使得转子上也存在磁场。
当定子磁场和转子磁场相互作用时,会产生电磁力使得转子开始旋转。
BLDC马达的转子位置和速度的控制是通过电子驱动器实现的,而驱动芯片则是电子驱动器的核心部件。
驱动芯片内部包含了若干个功率开关,它们可以根据控制信号进行开关操作,控制电流的流向和大小。
通过切换不同的功率开关,驱动芯片可以实现对马达转子的精确控制。
驱动芯片还可以根据马达的转子位置和速度进行反馈控制,从而实现闭环控制,提高系统的稳定性和响应速度。
BLDC马达驱动芯片的应用非常广泛。
在工业领域,它常用于机床、自动化生产线以及机器人等设备中,用于驱动各种需要精确控制的运动部件。
在家电领域,它常用于洗衣机、冰箱、空调等家电产品中,用于驱动风扇、压缩机等部件。
在电动车和无人机等交通工具中,BLDC马达驱动芯片也发挥着重要的作用,提供高效、可靠的动力输出。
此外,BLDC马达驱动芯片还广泛应用于医疗设备、电动工具、航空航天等领域。
BLDC马达驱动芯片具有许多优点。
首先,它可以实现高效能的驱动,因为无刷电机的摩擦和能量损耗较小。
其次,它具有较长的使用寿命和较高的可靠性,因为无需使用碳刷和换向器。
此外,BLDC 马达驱动芯片还可以实现精确的转子位置和速度控制,从而提高了系统的控制精度和响应速度。
最后,BLDC马达驱动芯片还可以实现闭环控制,提供更加稳定的输出。
L298N电机驱动器使用说明书
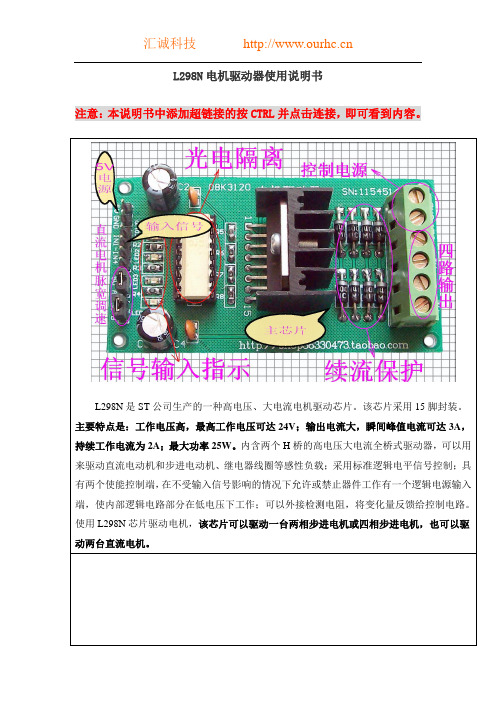
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
(如果无须调速可将两引脚接5V,使电机工作在最高速状态,既将短接帽短接)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机M1正转。
(如果信号端IN1接低电平,IN2接高电平,电机M1反转。
)控制另一台电机是同样的方式,输入信号端IN3接高电平,输入端IN4接低电平,电机M2正转。
(反之则反转),PWM信号端A控制M1调速,PWM信号端B控制M2调速。
可参考下图表:产品有售淘宝店:。
三相无刷直流电机驱动芯片大电流10a
三相无刷直流电机驱动芯片大电流10a 下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!解析三相无刷直流电机驱动芯片大电流10A引言在现代电气工程领域,三相无刷直流电机已经成为许多应用的首选。
ms35774步进马达驱动芯片的工作原理及应用

ms35774步进马达驱动芯片的工作原理及应用MS35774是一种步进马达驱动芯片,它的工作原理是通过控制电流来驱动步进马达。
它可以根据输入的脉冲信号来控制步进马达的转动,每一个脉冲信号对应马达转动的一个步距。
MS35774的工作原理如下:
1. 接收控制输入信号:MS35774接收来自主控制器的脉冲信号来控制步进马达的转动。
2. 生成驱动信号:根据输入的脉冲信号,MS35774内部的逻辑电路会生成一系列驱动信号,用于控制步进马达的相序。
3. 电流控制:MS35774会根据驱动信号控制步进马达的相电流大小和方向,使得马达按照预定的步进方式转动。
MS35774的应用主要是在各种需要精确控制转动的设备中,如打印机、机床、机器人、通信设备等。
它可以实现高精度的步进马达控制,可以根据需要控制马达的转速、转向和位置,是许多自动化设备中不可或缺的一部分。
总结来说,MS35774是一种步进马达驱动芯片,通过控制电流和相序来驱动步进马达的转动。
它可以在各种自动化设备中应用,在高精度步进马达控制方面具有重要作用。
TC118马达驱动IC(0.65_30天月结)
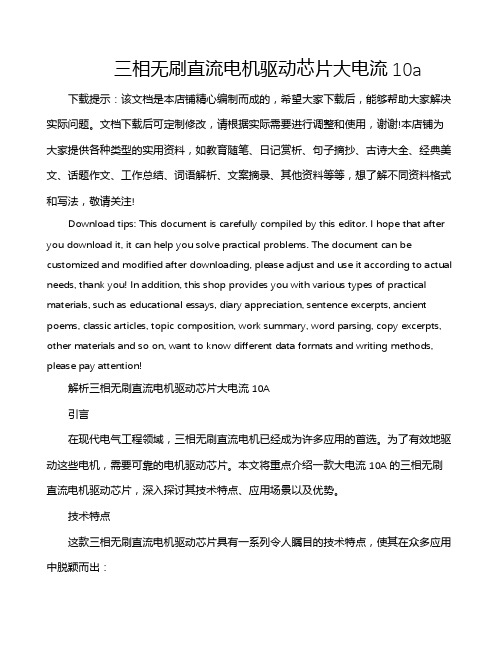
五、 推荐工作条件(Ta=25℃)
参数符号参数值单位
电源电压VCC 2.2~7.6 V 控制输入电压VIN 0~VCC V
正、反转输出电流Iout -1500~1500 mA 六、 电气特性(Ta=25℃,VCC=3V,RL=15Ω,特殊说明除外。
)
参数符号测试条件最小值典型值最大值单位整体线路
电路关断电流ICCST INA=INB=1 — 0 10 uA
工作电流ICC INA=H, INB=L or
INA=L, INB=H or
INA=H, INB=H
— 0.3 1 mA
控制输入
高电平输入电压VINH 2.0 — — V 低电平输入电压VINL — — 0.8 V 高电平输入电流IINH VIN=3V — 5 20 uA 低电平输入电流IINL VIN=0V -1 0 — uA 下拉电阻RIN — 1.5 — MΩ 驱动
输出导通阻抗RON Io=±200mA — 1 1.6 Ω 七、 输入/输出逻辑表
输入输出
INA INB OUTA OUTB
方式L L Hi-Z Hi-Z 待命状态
H L H L 前进
L H L H 后退
H H L L 刹车
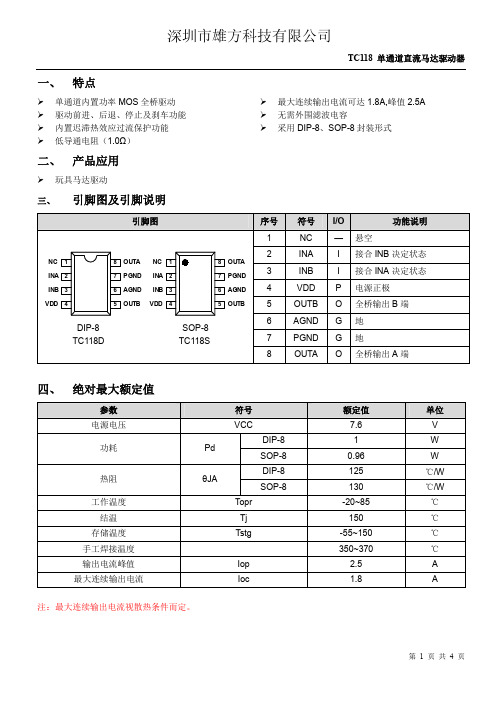
TC118 单通道直流马达驱动器
十一、 封装尺寸图
DIP-8
SOP-8
深圳市雄方科技有限公司。
电机控制芯片BA6209中文资料

电机驱动集成电路可逆电机驱动(BA6209 / BA6209N)BA6209和BA6209N可逆电动机驱动芯片,一般用适合用来刷马达。
两个逻辑输入允许三个输出。
模式:向前、反向和制动。
电机旋转速度可以设置任意通过控制电压。
与电机的控制引脚电压VR。
应用:录像机和盒式磁带录音机特性:1)功率晶体管可以处理大电流最大(用最大电流1.6A);2)当停止电动机制动应用;3)内置函数来吸收所产生的尖峰电流扭转和刹车;4)电动机转速控制引脚;5)很小的待机电流;一般VCC = 12V,IO = 5.5MA。
6)稳定运行期间从模式的变化;向前扭转或反之亦然。
7)与CMOS设备接口。
框图绝对最大额定参数(Ta = 25 °C)推荐的操作条件(Ta = 25°C)电特性(除非另外注明,Ta = 25°C和VCC = 12 v) 电气特性曲线输入/输出真值表:正向/反向控制,被迫停止,冲击电流,吸收是FIN以及控制RIN输入状态。
(1)正向/反向控制电路当FIN高电平,RIN低电平时,电流从OUT1到OUT2下降。
当FIN低电平,RIN高电平时,电流从OUT2到OUT1流动(参照真值表)。
(2)强制停止电路通过设置RIN和FIN都为高电平或都为低电平,能量供应汽车关闭和刹车。
通过吸收发动机反电动势能量。
(3)冲击电流吸收电路当一个高电压(如电机反转)引起的在OUT1和OUT2的产生,一个内部比较器检测到高电压和打开一个内部电路吸收浪涌电流。
(4)驱动电路电机的连接之间的转动方向:OUT1和OUT2对应的电流正向是从OUT1到OUT2流动;反向则是从OUT2到 OUT1流动。
输出电压(Vout)应用于电机是由方程得:V OUT (V) = V ZD _ V CE (sat.) = V ZD _ 0.2 (I OUT = 100mA),其中V ZD是恒定电压的齐纳电压。
二极管(ZD)连接到引脚4;如果参考电压V ref i是开启的,输出电压(Vout)由下式给出方程:V OUT (V) = V CC1 _ V CE (sat.) (PNP) _ 2V F _ V CE (sat.)= V CC1 _ 1.8 (I OUT = 100mA)引脚描述操作记录(1)电阻将集成电路功耗降低集成电路的功率耗散,阻力(约310 w)必须始终VCC和之间的连接电源驱动电路的销。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特点:
低静态工作电流;
宽电源电压范围:2V-12V ;
每通道具有3A 连续电流输出能力; 较低的饱和压降;
TTL/CMOS 输出电平兼容,可直接连CPU ; 输出内置钳位二极管,适用于感性负载; 控制和驱动集成于单片IC 之中; 具备管脚高压保护功能; 工作温度:-20°C -80°C 。
描述:
L9120是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC 之中,使外围器件成本降低,整机可靠性提高。
该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动大功率三极管,它具有较大的电流驱动能力,每通道具有3A 连续电流输出能力。
管脚定义:
序号 符号 功能
1 INL
L 路输入管脚 2 OUTL
L 路输出管脚 3 GND 地线 4 BL
L 路驱动管脚 5 BR R 路驱动管脚 6 GND 地线
7 OUTB
R 路输出管脚 8 INR
R 路输入管脚
绝对最大范围:Ta =25°C
范
围
符 号 参 数 最小 典型
最大 单 位
V CC 电源电压 2.0 5.0 12 V I DD
操作电流 200 350 500 uA I OUT max 电流峰值 - 3000 5000 mA VH IN 输入高电平 2.0 5.0 12.0 V VL IN
输入低电平
-0.3 0.5 0.7 V
DP 后缀 塑料封装(DIP8)
SO 后缀 塑料封装(SOP8)
逻辑关系:
INL INR OUTL OUTR
H L H L
L H L H
L L L L
H H 不允许 不允许
管脚波形图:
INL
INR
OUTL
OUTR
应用电路图:。