马达正反转驱动芯片
电机驱动芯片
自动0701 李欢20074998LMD18200是美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件。
同一芯片上集成有CMOS控制电路和DMOS功率器件,利用它可以与主处理器、电机和增量型编码器构成一个完整的运动控制系统。
LMD18200广泛应用于打印机、机器人和各种自动化控制领域。
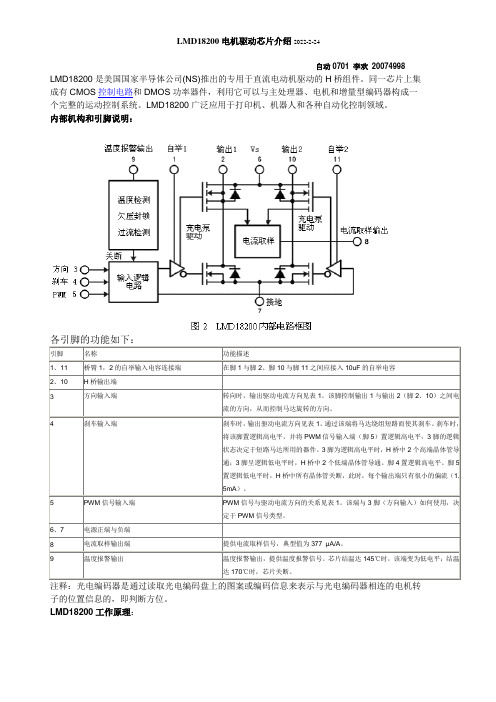
内部机构和引脚说明:引脚名称功能描述1、11 桥臂1,2的自举输入电容连接端在脚1与脚2、脚10与脚11之间应接入10uF的自举电容2、10 H桥输出端3 方向输入端转向时,输出驱动电流方向见表1。
该脚控制输出1与输出2(脚2、10)之间电流的方向,从而控制马达旋转的方向。
4 刹车输入端刹车时,输出驱动电流方向见表1。
通过该端将马达绕组短路而使其刹车。
刹车时,将该脚置逻辑高电平,并将PWM信号输入端(脚5)置逻辑高电平,3脚的逻辑状态决定于短路马达所用的器件。
3脚为逻辑高电平时,H桥中2个高端晶体管导通;3脚呈逻辑低电平时,H桥中2个低端晶体管导通。
脚4置逻辑高电平、脚5置逻辑低电平时,H桥中所有晶体管关断,此时,每个输出端只有很小的偏流(1.5mA)。
5 PWM信号输入端PWM信号与驱动电流方向的关系见表1。
该端与3脚(方向输入)如何使用,决定于PWM信号类型。
6、7 电源正端与负端8 电流取样输出端提供电流取样信号,典型值为377 µA/A。
9 温度报警输出温度报警输出,提供温度报警信号。
芯片结温达145℃时,该端变为低电平;结温达170℃时,芯片关断。
注释:光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的,即判断方位。
LMD18200工作原理:内部集成了四个DMOS管,组成一个标准的H型驱动桥。
通过充电泵电路为上桥臂的2个开关管提供栅极控制电压,充电泵电路由一个300kHz左右的工作频率。
可在引脚1、11外接电容形成第二个充电泵电路,外接电容越大,向开关管栅极输入的电容充电速度越快,电压上升的时间越短,工作频率可以更高。
L298N控制直流电机正反转
L298N控制直流电机正反转一、概述在现代工业自动化和机械设备中,直流电机因其控制简单、响应迅速等特点而被广泛应用。
直流电机的控制并非一件简单的事情,特别是要实现其正反转功能,就需要一种可靠的电机驱动器。
L298N是一款常用的电机驱动器模块,它基于H桥驱动电路,可以有效地控制直流电机的正反转,并且具备过载保护和使能控制功能,使得电机控制更为安全、可靠。
L298N模块内部集成了两个H桥驱动电路,可以同时驱动两个直流电机,且每个电机的驱动电流可达2A,使得它适用于驱动大多数中小型的直流电机。
L298N模块的控制逻辑简单明了,只需通过控制其输入逻辑电平,即可实现电机的正反转、停止等功能。
掌握L298N 模块的使用方法,对于熟悉和掌握直流电机的控制具有重要的意义。
在接下来的内容中,我们将详细介绍L298N模块的工作原理、控制逻辑、驱动电路连接方法以及在实际应用中的使用技巧,以帮助读者更好地理解和应用L298N模块,实现直流电机的正反转控制。
1. 简述直流电机在工业和生活中的重要性直流电机,作为一种重要的电能转换和传动设备,在工业和生活中发挥着至关重要的作用。
它们广泛应用于各种机械设备中,成为驱动各种工业设备和家用电器运行的核心动力源。
在工业领域,直流电机的重要性无可替代。
它们被广泛应用于各种生产线上的机械设备,如机床、泵、风机、压缩机、传送带等。
这些设备需要稳定、可靠的动力源来驱动,而直流电机正好满足这些需求。
它们具有高效、稳定、易于控制等优点,能够实现精确的速度和位置控制,从而提高生产效率和产品质量。
直流电机还在交通运输领域发挥着重要作用。
例如,电动汽车、电动火车、无人机等新型交通工具都采用了直流电机作为动力源。
这些交通工具需要高效、环保的动力系统来驱动,而直流电机正是满足这些需求的理想选择。
在生活中,直流电机也无处不在。
它们被广泛应用于各种家用电器中,如电扇、吸尘器、洗衣机、冰箱、空调等。
这些家电需要稳定、可靠的动力源来运行,而直流电机正是这些家电的核心动力源。
马达驱动芯片
马达驱动芯片马达驱动芯片(Motor driver chip)是一种用于控制直流电机或步进电机的集成电路芯片。
它将外部控制信号转化为驱动电流,从而控制电机的转动。
马达驱动芯片在电动工具、汽车、机器人、家电等众多领域都有广泛的应用。
它是电机系统中必不可少的一部分,为电机提供良好的电压和电流,保证其正常运行。
马达驱动芯片通常由功率模块和控制模块组成。
功率模块负责将控制信号转化为驱动电流,并为电机提供足够的功率,以实现电机的转动。
控制模块则负责接收外部控制信号,并根据信号的要求来调节功率模块的工作状态。
马达驱动芯片的基本功能包括电流调节、速度控制、方向控制和保护功能。
电流调节是马达驱动芯片最主要的功能之一。
它能够根据控制信号的输入来自动调节输出电流的大小,以满足电机的需求。
马达驱动芯片通常采用PWM调节电流的方式,通过调节信号的占空比来控制输出电流的大小。
这样可以实现对电机的精确控制,使其能够在不同负载和工作环境下都能正常运行。
速度控制是马达驱动芯片的另一个主要功能。
它能够根据控制信号的输入来调节电机的转速。
马达驱动芯片通常采用速度闭环控制的方式,通过与编码器或速度传感器的配合,实现对电机转速的反馈监测和调节。
这样可以使电机在不同的工作要求下都能够保持稳定的转速。
方向控制是马达驱动芯片的另一个重要功能。
它能够根据控制信号的输入来改变电机的运动方向。
马达驱动芯片通常通过控制电机连接的电极或继电器来实现方向的切换,从而控制电机的正转和反转。
马达驱动芯片还具有一些保护功能,以保证电机的安全和可靠运行。
常见的保护功能包括过流保护、过热保护、过压保护、欠压保护和短路保护等。
这些保护功能可以有效地防止电机过载、过热、过压或短路等情况的发生,从而保护电机和驱动芯片的安全。
总之,马达驱动芯片是电机系统中非常重要的一部分。
它能够将外部信号转化为驱动电流,控制电机的转动。
通过电流调节、速度控制、方向控制和保护功能等,它可以实现对电机的精确控制和保护,保证电机的安全和可靠运行。
马达驱动芯片大全

不可调
0.8欧 160度
0.4欧 150度 有
1欧 有 有
1.5欧 有 没有 没有 没有
有 有 有 有
AHX2021限流控制的优势 1)与其他玩具马达驱动IC比较,达到限制电流后,能够保持恒流输出,保护芯 片和马达不会烧毁,同时电流恒定,使马达维持充沛的动力。 2)限流可以调节,能够满足多种马达的限流要求。 3)在驱动转向马达的情况下,堵转达到限流后,堵转电流不随电源电压变化, 更省电。通过调整限流电阻,很容易匹配各种马达和电池。 4) 在恒流情况下,可进调整PWM频率,从而改善整体EMI干扰。
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021、AHX2023与其他玩具马达驱动芯片的比较
AHX2021 AHX2023 DX5065 KX5008 GPY006A PJ701R PJ9110 PJ9120 PJ9130 RZ7881 RZ7888 RZ7889 RZ7889D
1A 2A 否
0.8A 1.5A 否
3A
3A
1A
2A
3A
3A
1.5A
4A
5A5.Βιβλιοθήκη A否否是是
否
否
否
否
PWM调制 恒流
有
没有,达 到峰值电 流,减小 电流。
没有,依 靠过热限 制电流。 有
没有
没有
没有
没有
没有
没有
有
有
有
限流可调节 内阻 过热保护
外置电路 调节
外置电路 调节
不可调
不可调
不可调
不可调
不可调
工作范围 最大驱动电 流 峰值电流 是否外界功 率管 限流控制
TIDRV8833马达驱动解决方案

TIDRV8833马达驱动解决方案首先要使用DRV8833马达驱动,首先需要连接好电机和驱动芯片。
DRV8833芯片与电机的接线非常简单,只需要将电机的两个线连接到DRV8833的OUT1和OUT2引脚上即可。
此外,还需要将电源电压与DRV8833芯片的VCC引脚连接,并连接好一个逻辑电平来控制DRV8833的IN1和IN2引脚,用于控制电机的正向和反向旋转。
在连接完成后,还需要将DRV8833芯片的GND引脚与电路的地引脚连接。
接下来是控制电机的方案。
DRV8833芯片可以通过IN1和IN2引脚来控制电机的旋转方向和速度。
通过给IN1和IN2引脚施加不同的逻辑电平,可以实现电机的正向、反向旋转以及停止。
为了控制IN1和IN2引脚的逻辑电平,可以使用微控制器或单片机来生成PWM信号,并通过逻辑门或三态门来控制IN1和IN2引脚。
例如,可以使用Arduino开发板配合PWM引脚和数模转换器,来生成PWM信号并控制电机的速度。
在控制电机方向时,只需要将IN1和IN2引脚分别设置为逻辑0和逻辑1,或逻辑1和逻辑0即可。
其中,逻辑0表示使能对应的H桥电流驱动输出,逻辑1表示禁用对应的H桥电流驱动输出。
在控制电机速度时,可以通过调整PWM信号的占空比来控制电机的转速。
占空比越大,电机转速越快;占空比越小,电机转速越慢。
此外,DRV8833还支持电流限制功能,可以通过设置驱动芯片上的一些引脚来限制电机的最大输出电流。
这对于保护电机和驱动芯片非常重要,防止电流过大而导致的损坏。
总结起来,TIDRV8833马达驱动的解决方案包括连接电机和驱动芯片,控制电机的方向和转速,并设置电流限制以保护电机和驱动芯片。
通过合理的设计和控制,可以实现对电机的精确控制和保护。
SGD2021 驱动电流可调和带恒流功能的两通道马达驱动芯片 规格说明书

规格说明书SGD2021 驱动电流可调和带恒流功能的两通道马达驱动芯片版本1.1 希格玛保留不预先通知而修改此文件的权利目录1.概述 (3)2.特性 (3)3.引脚说明 (4)4.管脚功能定义 (4)5.定购信息 (5)6.电气参数 (5)7.应用电路图 (6)7.1小电流和低电压的正负转线路 (6)7.2大电流和高电压的正负转线路 (6)8.封装信息 (8)8.1DIP8封装 (8)8.2ESOP8封装 (9)9.修改记录 (10)1. 概述SGD2021是为控制和驱动直流马达设计的两通道MOSFET功率驱动+驱动电流可调的芯片,其可以控制马达的正转、反转、刹车等功能,可用来代替传统的分立器件驱动电路,使外围器件更精简,智能过温保护加恒流驱动,使整机可靠性更高。
此芯片有两个TTL/CMOS兼容电平的输入端口,具有良好的抗干扰性,同时两个输出端口能直接驱动一个马达正反转或者两个马达的单方向ON/OFF。
此芯片还具有较大的电流驱动力和宽的电源电压范围。
2. 特性宽的电源电压范围:4.2V~16V低导通电阻 800毫欧内置智能过温保护电路内置智能过流保护电路低静态工作电流,小于15uA具有高达1.5A持续驱动电流,3A峰值电流输出编程输出马达需要最大恒流驱动电流带马达启动时自动提高恒流驱动电流可编程调节恒流驱动的PWM频率TTL/CMOS电平输入兼容控制和驱动集成于单片IC之中3. 引脚说明4. 管脚功能定义管脚序号管脚名称功能描述驱动电流调整,恒流电流值:Iset=1.23*200K/Riset1 ISET2 IN1 马达信号输入13 IN2 马达信号输入2固定关断时间调整,悬空是25US,4 OTSET公式:Toff=1/(0.04+14.8/Roffset) us,Roffset单位是KΩ5 GND 电源地6 OUT1 马达驱动输出17 VIN 电源输入8 OUT2 马达驱动输出2输入输出关系表IN1 IN2 OUT1 OUT2 马达动作1 0 H L 正转0 1 L H 反转停止(待机)0 0 L L1 1 H H 刹车5. 定购信息封装规格温度范围定购型号包装运输产品打印ESOP8 -40℃~85℃ SGD2021SH08Tape and Reel2500pcsSGD2021XXXXXXXXXXXXDIP8 -40℃~85℃ SGD2021DH08管装(50PCS/管)SGD2021XXXXXXXXXXXXG:ROHSH:ReachE:ESOP D:DIP86. 电气参数参数典型值单位工作电压 4.2 ~ 16 V待机电流< 15 uA输入高电平> 1.8 V输入低电平< 0.8 V输出持续电流 1.5 A输出峰值电流 3 A 工作温度-40~85 ℃存储温度-50~100 ℃注:驱动马达的恒流值与Riset电阻的关系为 Iset=1.23*200K/Riset,限流电阻的选择最好大于164K(对应电流1.5A)关断时间是25US,如果根据马达特性,调整OTSET的外接电阻,可以调整PWM频率,从而改善整体EMI干扰。
马达驱动IC

六、
电气特性
参数
(Ta=25℃,VCC=3V,RL=15Ω,特殊说明除外。) 符号 ICCST ICC 测试条件 INA=INB=1 INA=H, INB=L or INA=L, INB=H or INA=H, INB=H 最小值 — — 典型值 0 0.3 最大值 10 1 单位 uA mA
整体线路 电路关断电流 工作电流 控制输入 高电平输入电压 低电平输入电压 高电平输入电流 低电平输入电流 下拉电阻 驱动 输出导通阻抗 RON Io=±200mA — 1 1.6 Ω VINH VINL IINH IINL RIN VIN=3V VIN=0V 2.0 — — -1 — — — 5 0 1.5 — 0.8 20 — — V V uA uA MΩ
2 3 4 C4 104P
MCU
注:1、图中 C1/104P 电容为并接于马达上不是置于 PCB 板上。 2、相比市场上同类产品可以省去图中 C2、C3、C4。
十、
芯片使用注意事项
1
2
1、 以上推荐电路及参数仅适用于普通遥控车玩具,其他玩具及电机驱动在使用 PTC918 时请根据实际情况来使 用。 2、 持续电流驱动能力受封装形式、VDD、VCC、芯片差异及环境温度等因素影响,规格书给出参数仅供参考。 在实际使用中请根据产品考虑一定的余量。 3、 PTC918 采用 CMOS 工艺设计制造,对静电敏感,要求在包装、运输、加工生产等全过程中需注意做好防静 电措施。 0755-26069679 26409877
热阻 工作温度 结温
A 存储温度
深圳市龙腾微电子有限公司
第 1 页 共 4 页
PTC918 单通道大直流马达驱动芯片
输出电流峰值 最大连续输出电流 Iop Ioc 2.5 1.8 A A
2A双向直流电机(马达)驱动芯片 RZ7888

0.05
输入高电平
ViH
2.2
输入低电平
ViL
输入电流(2V)
Ii
Vcc = 6V Vi = 2V
输入电流(3V)
Ii
Vcc = 6V Vi = 3V
输出电流
Iout
SOP8 封装, 5,6,7,8 脚外要Leabharlann 布散热铜片(PCB 板铜片)
过热保护温度
Totp
典型 --
4
5.7 0.15 3.5 0.5 70 100
RZ7888
电特性( 除特殊说明外:Vcc = 6V,Ta = 25℃ )
参数
符号
条件
最小
工作电压 待机电流
VOPR
3.0
Is
Vcc = 9V Vi = 0
静态电流
Icc
Vcc = 6V V1 = 3V
2
负载开路
输出高电平
VHOUT Vcc = 6V Io =2A
5.5
输出低电平
VLOUT
Vcc = 6V Io = 2A
2
130
最大 11 2 7
5.9 0.3 6 0.7 100 150
4
单位 V uA mA
V V V V uA uA A
℃
应用线路
2
INF
1
INR
4
Vcc
I limit Control Thermal Shutdown
Gnd
3
Drive
Drive
OUTF
56
C1 0.1uF
Vcc
C2 470uF
M
OUTR
特点
z 微小的待机电流,小于 2uA。 z 工作电压范围宽 3.0V~11V.. z 有紧急停止功能 z 有过热保护功能 z 有过流嵌流及短路保护功能 z 封装外形为: SOP8
马达驱动芯片与马达搭配方法

马达驱动芯片与马达搭配方法1. 马达驱动芯片的基本原理马达驱动芯片指的是一种功能强大、能够控制马达运转的集成电路。
它通常由一个或多个H桥驱动器组成,可以通过控制电流和电压的方式实现马达的正反转。
马达驱动芯片的主要作用是保护马达不受过流、过热及短路等问题的影响,同时可以使马达的运行更为平稳、快速、高效。
2. 马达驱动芯片的种类马达驱动芯片的种类较多,通常可分为直流马达驱动芯片、步进马达驱动芯片、无刷直流马达驱动芯片等多种。
其中,直流马达驱动芯片主要适用于大型的直流马达;步进马达驱动芯片适用于控制一些需要精密定位和控制的马达;无刷直流马达驱动芯片则适用于高转速、高效率的马达。
3. 马达与马达驱动芯片的搭配方法在使用马达时,我们通常需要选择一款适合的马达驱动芯片来配合使用,以提高马达的性能和稳定性。
以下是一些常用的马达与马达驱动芯片配合的方法:3.1 直流马达与直流马达驱动芯片搭配直流马达是一种最基本的电机,通常通过控制驱动电流和电压来控制转速。
直流马达驱动芯片通过PWM脉冲信号控制高低电平的占空比,从而控制电机的电流、电压输出和转速。
常用的直流马达驱动芯片有L298、L293D等。
3.2 步进马达与步进马达驱动芯片搭配步进马达的控制需要伺服控制器,步进马达驱动芯片则通过控制驱动脉冲来改变马达的运动。
每一次脉冲,马达的转动角度就会发生变化。
常用的步进马达驱动芯片有ULN2003、A4988等。
3.3 无刷直流马达与无刷直流马达驱动芯片搭配无刷直流马达是一种通过外置电子换向器实现网上管理的新型马达,它的特点是高转速、低功耗。
而在无刷直流马达的控制中,需要用到一款无刷直流马达驱动芯片,通过不同的信号脉冲控制换向器的切换,从而驱动无刷直流马达运行。
常用的无刷直流马达驱动芯片有DRV8312、ILQ615等。
4. 马达驱动芯片的应用马达驱动芯片广泛应用于各种电气设备中。
例如机器人、无人机、数控机床、电动自行车、工业自动化等领域。
L298N控制直流电机正反转
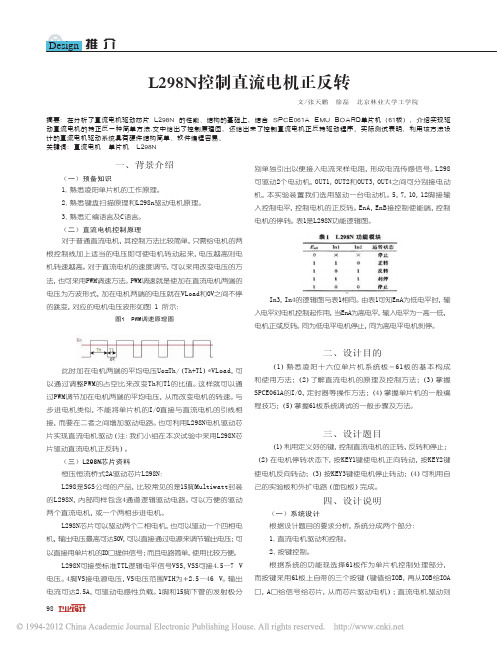
98推 介Design L298N控制直流电机正反转文/张天鹏 徐磊 北京林业大学工学院摘要:在分析了直流电机驱动芯片 L298N 的性能、结构的基础上,结合 SPCE061A EMU BOARD单片机(61板),介绍实现驱动直流电机的转正反一种简单方法.文中给出了控制原理图,还给出来了控制直流电机正反转驱动程序。
实际测试表明,利用该方法设计的直流电机驱动系统具有硬件结构简单、软件编程容易。
关键词:直流电机 单片机 L298N一、背景介绍(一)预备知识1.熟悉凌阳单片机的工作原理。
2.熟悉键盘扫描原理和L298n驱动电机原理。
3.熟悉汇编语言及C语言。
(二)直流电机控制原理对于普通直流电机,其控制方法比较简单,只需给电机的两根控制线加上适当的电压即可使电机转动起来,电压越高则电机转速越高。
对于直流电机的速度调节,可以采用改变电压的方法,也可采用PWM调速方法。
PWM调速就是使加在直流电机两端的电压为方波形式,加在电机两端的电压就在VLoad和0V之间不停的跳变,对应的电机电压波形如图 1 所示:图1 PWM调速原理图此时加在电机两端的平均电压Uo=Th/(Th+Tl)*VLoad,可以通过调整PWM的占空比来改变Th和Tl的比值。
这样就可以通过PWM调节加在电机两端的平均电压,从而改变电机的转速。
与步进电机类似,不能将单片机的I/O直接与直流电机的引线相接,而要在二者之间增加驱动电路。
也可利用L298N电机驱动芯片实现直流电机驱动(注:我们小组在本次试验中采用L298N芯片驱动直流电机正反转)。
(三)L298N芯片资料恒压恒流桥式2A驱动芯片L298N:L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V ,可以直接通过电源来调节输出电压;可以直接用单片机的I O口提供信号;而且电路简单,使用比较方便。
电机驱动芯片工作原理
电机驱动芯片工作原理引言电机驱动芯片是一种用来控制和驱动电机的集成电路,它通常包含了功率放大器、逻辑控制电路和保护电路等功能。
它能够将来自微控制器或其他数字信号源的指令转化为对电机的控制信号,从而实现对电机的精确控制。
本文将详细介绍电机驱动芯片的基本工作原理。
电机驱动芯片的组成通常情况下,一个完整的电机驱动芯片由以下几个部分组成:1. 功率放大器功率放大器是电机驱动芯片中最重要的部分之一。
它负责将输入信号进行放大,并输出足够大的功率给电机,以便让电机正常运行。
功率放大器一般采用功率晶体管、MOSFET或IGBT等半导体器件实现。
2. 逻辑控制电路逻辑控制电路是用来接收并处理来自微控制器或其他数字信号源的指令,并根据指令产生相应的输出信号。
逻辑控制电路通常由计数器、状态寄存器、比较器等逻辑门电路构成。
3. 保护电路保护电路用来保护电机和驱动芯片免受过压、过流、过温等异常情况的伤害。
常见的保护功能包括过流保护、过温保护和短路保护等。
4. 控制接口控制接口是用来连接外部数字信号源(如微控制器)和驱动芯片的接口,通常包括输入信号端口和输出信号端口。
输入信号端口用来接收外部指令,输出信号端口则将处理后的信号传递给功率放大器。
电机驱动芯片的工作原理了解了电机驱动芯片的组成之后,我们现在可以详细介绍其工作原理了。
步骤1:接收指令首先,电机驱动芯片通过控制接口接收来自微控制器或其他数字信号源的指令。
这些指令可以是启动、停止、正转、反转等控制命令,也可以是调速命令。
步骤2:处理指令一旦收到指令,逻辑控制电路将开始处理这些指令。
逻辑控制电路通常包括计数器、状态寄存器和比较器等逻辑门电路,它们将根据指令的内容产生相应的输出信号。
步骤3:生成控制信号逻辑控制电路产生的输出信号将被送入功率放大器。
功率放大器负责将这些信号进行放大,并驱动连接在其输出端的电机。
功率放大器一般采用功率晶体管、MOSFET 或IGBT等半导体器件实现。
l293d电机驱动原理

l293d电机驱动原理L293D电机驱动原理引言:电机驱动是电气控制领域中的重要技术,它能够在各种应用中提供动力支持。
L293D是一种常用的电机驱动芯片,它能够有效地控制直流电机的运转。
本文将介绍L293D电机驱动的原理及其应用。
一、L293D电机驱动芯片概述L293D是一种双H桥直流电机驱动芯片,能够同时控制两个直流电机的转向和速度。
它内部集成了四个开关和两个电流放大器,能够提供足够的电流和电压来驱动电机。
L293D电机驱动芯片具有结构简单、使用方便、性能稳定等优点,在机器人、小车、无人机等领域得到广泛应用。
二、L293D电机驱动原理1. 电源供电:L293D芯片需要外部供电,通常使用5V直流电源来供电。
电源的正极连接到VCC引脚,负极连接到GND引脚。
2. 控制信号:L293D芯片有4个输入引脚,分别是IN1、IN2、IN3和IN4。
这四个引脚用于控制电机的转向和速度。
通过改变这四个引脚的电平状态,可以实现电机的正转、反转和停止。
3. 电机驱动:L293D芯片的输出引脚有8个,分别是OUT1、OUT2、OUT3、OUT4、ENA、ENB、VCC1和VCC2。
其中OUT1和OUT2分别与一个电机相连,OUT3和OUT4与另一个电机相连。
ENA和ENB是使能引脚,用于控制电机的使能状态。
VCC1和VCC2是电机的电源引脚,需要与电机的电源连接。
4. 逻辑控制:L293D芯片的控制信号通过IN1、IN2、IN3和IN4引脚输入。
根据不同的控制信号组合,可以实现电机的正转、反转和停止。
比如,将IN1和IN2设置为高电平,IN3和IN4设置为低电平,即可实现电机的正转;将IN1和IN2设置为低电平,IN3和IN4设置为高电平,即可实现电机的反转;将IN1、IN2、IN3和IN4都设置为低电平,即可实现电机的停止。
三、L293D电机驱动应用L293D电机驱动芯片广泛应用于各种机电设备中,如机器人、小车、无人机等。
SA9110 12V 1.2A H桥马达电机驱动芯片 兼容L9110S

SA9110描述SA9110是为低电压下工作的系统而设计的单通道低导通电阻直流电机驱动集成电路。
集成了电机正转/反转/停止/刹车四个功能SA9110内置温度保护功能,当芯片温度超过内部温度保护电路设置得最高温度点后,内部电路关断内置的功率开关管,切断负载电流,避免温度过高造成塑料封装冒烟、起火等安全隐患。
特性⚫ 工作电压范围 2.5-12.0V ⚫ 最大持续电流1.2A,峰值2.0A ⚫低待机电流 (typ.0.1uA)⚫ 低静态工作电流(typ.200uA ) ⚫ 集成过温保护功能; ⚫SOP8封装典型应用⚫ 直流马达驱动 ⚫ 脉冲电磁阀驱动 ⚫ 步进马达驱动 ⚫ 开关功率管SA9110封装和简单应用电路订购信息应用参考电路芯片使用注意事项:1.以上推荐电路及参数仅适用于普通遥控车玩具,其他玩具及电机驱动在使用SA9110时请根据实际情况来使用。
2.持续电流驱动能力受封装形式、VM、芯片差异及环境温度、PCB 材料及厚度等因素影响,规格书给出参数仅供参考。
在实际使用中请根据产品考虑一定的余量。
3.SA9110功率电源端附近的去耦电容必须就近连接,必须添加,否则容易造成电路击穿;功率电源对地去耦电容容值可根据电机适当调整,图中给出的电容值为参考值。
4.OUTA与OUTB端连接到地的104电容为旁路电容,在三节及三节以上电池的应用条件下建议添加,该电容可有效改善因电机快速正、反转切换而引起的电压尖峰击穿输出端口问题。
5.SA9110采用MOS 工艺设计制造,对静电敏感,要求在包装、运输、加工生产等全过程中需注意做好防静电措施。
6.马达启动瞬间的电流值建议不要超过2.0A。
脚位定义 TYPE DESCRIPTION1 OUTA O 输出OUTA2 VM P 电源输入脚,连接10uF或更大电容在VM和地之间3 VM P 电源输入脚,连接10uF或更大电容在VM和地之间4 OUTB O 输出OUTB5 GND P 功率地6 INA I 逻辑输入INA7 INB I 逻辑输入INB8 GND P 功率地绝对最大定额值V输入电压INA,INB -0.3 7.0静电保护(人体模型)VM, INA,INB,OUTA,OUTB 6 kV工作温度T J-40 150C存储温度T stg-65 150热阻θJA100 °C/W 推荐工作范围参数最小最大单位电源电压VM 3.0 12.0V输入电压INA,INB 0 7.0输出电流I OUTA, I OUTB0 1.2 A 电气特性(VM=6.0V, Ta=25゜C)参数测试条件最小值典型值最大值单位导通阻抗R DSON I OUT=0.8A 0.45 0.65 ΩINA/INB高电平输入电压V INH 2.0 7.0V 低电平输入电压V INL0 0.8高电平输入电流I INH25 50uA 低电平输入电流I0 1功能框图输入-输出逻辑表INA INB OUTA OUTB 工作状态工作电流L L Hi-Z Hi-Z 待命状态I VM_OFFH L H L 前进I VM_ONL H L H 后退I VM_ONH H L L 刹车I VM_ON 输入-输出波形应用说明1、基本工作模式a)待机状态在待机状态下,INA=INB=L。
单路电机正转反转的芯片

单路电机正转反转的芯片一、引言电机作为现代科技中不可或缺的元件之一,广泛应用于各个领域,从家电到工业设备,无不离开电机的运转。
而在电机的运转中,正转和反转是最基本的运动方式。
为了实现电机的正转和反转,需要一种特殊的芯片来控制电机的转向。
本文将介绍一种用于单路电机正转反转的芯片。
二、芯片的作用单路电机正转反转的芯片是一种用于控制电机转向的电子元件。
它通过接收来自控制器的信号,以及电机的电源信号,实现电机的正转和反转。
芯片内部集成了逻辑电路和功率驱动电路,能够在控制器的指令下,根据输入的信号控制电机的转向。
同时,芯片还具备保护电机的功能,可以监测电机的工作状态,如过流、过载等,以避免电机损坏。
三、芯片的工作原理单路电机正转反转的芯片内部包含逻辑电路和功率驱动电路。
逻辑电路负责接收来自控制器的信号,并根据信号的不同,控制功率驱动电路的工作状态。
功率驱动电路则负责将电源信号传递给电机,实现正转和反转。
具体来说,当控制器发送正转信号时,逻辑电路会将该信号传递给功率驱动电路,使其将电源信号传递给电机,使其正转。
反之,当控制器发送反转信号时,逻辑电路会将该信号传递给功率驱动电路,使其将电源信号反向传递给电机,使其反转。
四、芯片的特点1. 精确控制:芯片能够精确控制电机的转向,无论是正转还是反转,都能够实现精确的控制。
2. 高效性能:芯片采用高效的电路设计和优质的材料,能够提供稳定可靠的工作性能,同时具备较低的功耗。
3. 多种保护功能:芯片内部集成了多种保护功能,如过流保护、过载保护等,能够有效保护电机免受损坏。
4. 易于集成:芯片体积小巧,接口丰富,易于与其他电子元件进行集成,适用于各种电机控制系统。
五、应用场景单路电机正转反转的芯片广泛应用于各个领域。
以下是一些常见的应用场景:1. 家电领域:电视、空调、洗衣机等家电中的电机控制系统,都需要使用单路电机正转反转的芯片。
2. 工业设备:工业生产中的各种设备,如机械臂、输送带等,都需要使用单路电机正转反转的芯片来控制电机的转向。
全桥驱动芯片
全桥驱动芯片
全桥驱动芯片指的是一种用于控制直流电机或步进电机的芯片。
它能够通过控制电流方向和大小来实现电机的正转、反转以及调速等功能。
本文将从全桥驱动芯片的原理、结构和应用角度对其进行详细介绍。
全桥驱动芯片的原理是利用开关管件来控制电流的流向。
在全桥驱动芯片内部会有四个开关管件,分别用于控制驱动电机的正、反转。
通过控制这四个开关的开关状态,可以实现直流电机或步进电机的正转、反转操作。
同时,全桥驱动芯片还能够根据外部输入信号的大小和频率来调整电机的速度。
由于采用了开关管件来控制电流的流向,全桥驱动芯片具有高效率、低功耗的特点。
全桥驱动芯片的结构一般包括功率输出级、PWM电压调节电
路和逻辑控制电路等部分。
其中,功率输出级主要由四个开关管件组成,用于控制电流的流向;PWM电压调节电路用于调
整输出电压的大小,从而控制电机的转速;逻辑控制电路则主要负责接收外部输入信号并控制开关管件的开启和关闭。
全桥驱动芯片在工业自动化、机器人控制、电动车等领域有着广泛的应用。
在工业自动化中,全桥驱动芯片能够实现对电机转速的精确控制,从而使生产过程更加稳定和高效。
在机器人控制方面,全桥驱动芯片能够控制多个电机同时运动,实现机器人的各种动作。
在电动车中,全桥驱动芯片则用于控制电机的转向和调速,实现车辆的前进、后退以及变速等功能。
总结起来,全桥驱动芯片具有高效率、低功耗的特点,能够精确控制电机的转速和转向,广泛应用于工业自动化、机器人控制和电动车等领域。
随着科技的不断进步,全桥驱动芯片的性能也在不断提高,将为各个领域的发展提供更加强大的支持。
芯片控制电机正反转原理
芯片控制电机正反转原理一、引言在现代科技领域中,电机的应用非常广泛,而芯片作为电子设备的核心部件,具有高度集成和智能控制的特点,被广泛应用于电机控制系统中。
本文将介绍芯片控制电机正反转的原理和工作过程。
二、芯片控制电机正反转的基本原理芯片控制电机正反转的基本原理是通过改变电机输入的电流方向来实现。
电机的正转和反转是由电流的方向决定的,而芯片作为控制器,通过控制电流的方向来控制电机的运行状态。
三、芯片控制电机正反转的工作流程1. 输入控制信号芯片控制电机正反转的第一步是输入控制信号。
控制信号可以通过外部设备或者编程方式输入到芯片中,用来控制电机的正反转。
2. 信号处理芯片接收到控制信号后,会进行信号处理。
这一步主要是根据控制信号的不同,判断电机应该是正转还是反转,并将处理结果发送给下一步骤。
3. 输出电流控制信号芯片根据信号处理的结果,会输出电流控制信号。
这个信号的作用是改变电机输入的电流方向,从而控制电机的正反转。
4. 电机正反转电流控制信号经过放大和处理后,被送到电机驱动器。
电机驱动器根据信号的电流方向,将电流引导到电机的不同线圈,从而实现电机的正反转。
四、芯片控制电机正反转的应用芯片控制电机正反转的应用非常广泛,例如电动车、工业自动化设备、家用电器等。
以电动车为例,芯片可以根据驾驶者的控制信号,实现电机的正反转,从而控制电动车的前进和后退。
五、芯片控制电机正反转的优势1. 精确控制:芯片控制电机正反转可以实现精确控制,可以根据需要控制电机的转速和转向。
2. 高效能耗:芯片控制电机正反转可以根据实际需求调整电机的工作状态,从而提高能源利用效率。
3. 简化系统:芯片控制电机正反转可以减少电路和线缆的复杂性,简化整个系统的设计和布局。
六、结论芯片控制电机正反转通过改变电流的方向来控制电机的运行状态,具有精确控制、高效能耗和简化系统等优势。
随着科技的不断发展,芯片控制电机正反转的应用将会越来越广泛,为各行各业带来更多的便利和效益。
桥式驱动芯片控制电机运转
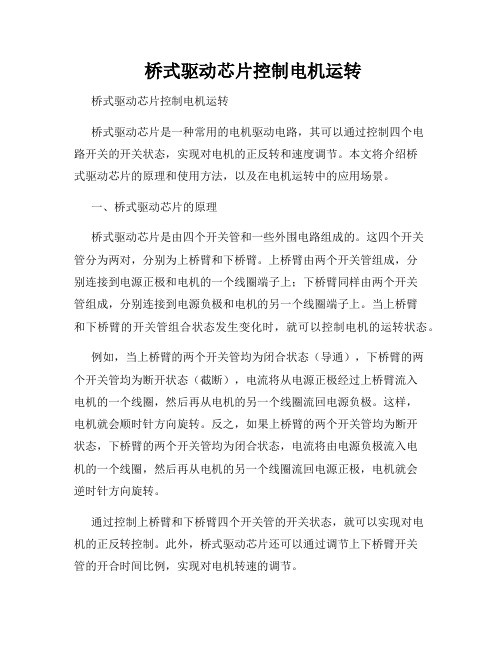
桥式驱动芯片控制电机运转桥式驱动芯片控制电机运转桥式驱动芯片是一种常用的电机驱动电路,其可以通过控制四个电路开关的开关状态,实现对电机的正反转和速度调节。
本文将介绍桥式驱动芯片的原理和使用方法,以及在电机运转中的应用场景。
一、桥式驱动芯片的原理桥式驱动芯片是由四个开关管和一些外围电路组成的。
这四个开关管分为两对,分别为上桥臂和下桥臂。
上桥臂由两个开关管组成,分别连接到电源正极和电机的一个线圈端子上;下桥臂同样由两个开关管组成,分别连接到电源负极和电机的另一个线圈端子上。
当上桥臂和下桥臂的开关管组合状态发生变化时,就可以控制电机的运转状态。
例如,当上桥臂的两个开关管均为闭合状态(导通),下桥臂的两个开关管均为断开状态(截断),电流将从电源正极经过上桥臂流入电机的一个线圈,然后再从电机的另一个线圈流回电源负极。
这样,电机就会顺时针方向旋转。
反之,如果上桥臂的两个开关管均为断开状态,下桥臂的两个开关管均为闭合状态,电流将由电源负极流入电机的一个线圈,然后再从电机的另一个线圈流回电源正极,电机就会逆时针方向旋转。
通过控制上桥臂和下桥臂四个开关管的开关状态,就可以实现对电机的正反转控制。
此外,桥式驱动芯片还可以通过调节上下桥臂开关管的开合时间比例,实现对电机转速的调节。
二、桥式驱动芯片的使用方法使用桥式驱动芯片进行电机控制,一般需要将芯片与电机、电源以及微控制器或其他控制设备连接起来。
首先,将电源的正极和负极分别连接到桥式驱动芯片的相应引脚上,供芯片和电机运行所需的电源。
其次,将电机的两个线圈分别连接到桥式驱动芯片的上桥臂和下桥臂的相应引脚上。
这样,电机的线圈就与芯片的开关管相连接,可以实现电机的正反转。
最后,使用微控制器或其他控制设备,通过控制桥式驱动芯片引脚的电平状态,来控制芯片的开关管的开合,从而控制电机的运转状态和速度。
三、桥式驱动芯片在电机运转中的应用场景桥式驱动芯片广泛应用于各种需要电机控制的领域,例如机器人、电动车、家用电器等。
双通道h桥电机驱动芯片
双通道h桥电机驱动芯片双通道H桥电机驱动芯片(Dual Channel H-Bridge Motor Driver)是一种常见的电机驱动器,通常用于直流(DC)电机控制,其设计可以实现向前、向后、制动、浮动等多种控制模式。
在电机应用领域中,双通道H桥电机驱动芯片具有广泛的应用场景,例如:机器人、车辆、喷墨打印机等。
它可以完成电机的正反转、速度调节、位置控制等功能。
双通道H桥电机驱动芯片的原理H桥是一种用于控制电机方向的电路,由4个开关管组成,可以使电机正反转并实现制动和浮动模式。
当S1和S4导通,S2和S3截止时,电机向前转动;当S2和S3导通,S1和S4截止时,电机向后转动;当S1、S2、S3和S4都截止时,电机处于浮动状态;当S1、S2、S3、S4都导通时,电机处于制动状态。
双通道H桥电机驱动芯片是用于控制电机方向和速度的集成电路。
它集成了4个MOSFET三极管,可以方便地控制电机正反转,同时可以通过PWM调节电机的速度。
双通道H桥电机驱动芯片的特点1.可控制2个电机双通道H桥电机驱动芯片可以控制两个电机,使其正反转或停止。
它可以广泛应用于机器人、车辆、喷墨打印机等需要控制多个电机的场合。
2. PWM调速PWM调速是一种常见的电机调速方法,它通过在不同时间间隔内改变电机电压的高低电平,以改变电机的平均电压,从而控制电机速度。
双通道H桥电机驱动芯片通过PWM信号来调整电机的转速,使得输出电压的平均值可以在更广的范围内调节,从而控制电机的速度。
3.高效率双通道H桥电机驱动芯片具有非常高的效率。
它采用有源保护电路和多级保护,可以保护芯片不被损坏。
同时,它采用多级电感设计,使得电源电流更加稳定,从而提高了电机的效率。
4.小封装双通道H桥电机驱动芯片采用小封装方式,具有较小的体积和重量,使得它可以在较小的空间内进行布置和安装。
同时,它采用SOP、SSOP、TSSOP等多种封装方式,可以方便不同的应用需求。
drv8803 工作原理

drv8803 工作原理
drv8803是一种用于驱动直流电机的芯片,它的工作原理是通过控制电流来控制电机的转动。
下面将详细介绍drv8803的工作原理。
drv8803是一种双全桥直流电机驱动器,它可以控制直流电机的正反转和速度。
它采用了PWM(脉宽调制)技术,通过调节PWM 信号的占空比来控制电机的转速,从而实现对电机的精确控制。
在drv8803中,有两个全桥驱动器,每个驱动器包含两个开关管。
其中一个开关管连接到电机的正极,另一个连接到电机的负极。
通过控制这四个开关管的导通和断开,可以改变电流的流向,从而实现电机的正反转。
在驱动电机时,首先需要提供一个PWM信号作为控制输入。
PWM信号的频率通常在几十kHz到几百kHz之间,具体取决于应用的要求。
PWM信号的占空比决定了电机的转速,占空比越大,电机转速越快,反之亦然。
drv8803还可以通过控制电流大小来控制电机的转矩。
在drv8803中,有一个电流检测电阻用于检测电机的电流。
通过调节电流检测电阻的大小,可以改变电机的电流,从而改变电机的转矩。
drv8803还具有过流保护功能。
当电机电流超过设定的阈值时,drv8803会自动切断电流,以保护电机和芯片不受损坏。
drv8803通过控制电流和PWM信号来控制直流电机的转动。
它具有高精度、高效率和可靠性等优点,广泛应用于机器人、自动化设备、电动工具等领域。
它的工作原理简单清晰,易于理解和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特点:
⏹ 低导通电阻; ⏹ 低静态工作电流; ⏹ 内置过温保护电路; ⏹ 待机时关闭电荷泵电路 ⏹ 最低至1.8V 的工作电压; ⏹ 控制和驱动集成于单片IC 之中; ⏹ 具有1A 持续电流,2A 峰值电流输出; ⏹ TTL/CMOS 输出电平兼容,可直接连CPU;
描述:
L7010R 是为控制和驱动直流马达设计的两通道功率MOSFET 的H 桥集成电路器件,它可以控制马达正转,反转并且具有刹车功能,用来代替传统分立器件驱动电路,使外围器件减少,整机可靠性提高。
该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出能直接驱动马达,它具有较大的电流驱动能力,每通道能通过2A 的峰值电流,同时它具有较低的导通电阻;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流马达、步进马达或开关功率管的使用上安全可靠。
L7010R 被广泛应用于玩具马达驱动、数码相机马达驱动,步进马达驱动,脉冲电磁阀门驱动和智能锁具马达驱动等电路上。
管脚定义:
符号 功能 符号
功能 OA A 路输出 GND 地线 VCC 电源 IA A 路输入
VCC 电源 IB B 路输入 OB
B 路输出
GND
地线
塑料封装(SOP8)
L7010R
系统框图:
绝对最大值:
符号 参数 最小值 最大值 单位 VCC DC 电源电压 -0.3 7.0 V VIN 输入电压 -0.3 VDD+0.3
V PD 功耗 -- 1 W TA 工作温度 -10 75 ℃ TJ 结温 -- 150 ℃ TS
储存温度
-55
150
℃
推荐工作条件(TA=25℃)
符号 参数 最小值 典型 最大值 单位 VCC DC 电源电压 1.8 -- 5.50 V VIN 输入电压 2.2 -- 5.50 V VIH 最低输入高电压 0.8VDD -- VDD+0.3 V VIL 最高输入低电压 -0.3 -- 0.4VDD
V IL 输入漏电流 -1 -- 1 µA IDD 工作电流 -- 1 2 mA ISTB
待机电流
--
< 0.1
10
µA
OA OB
IA VCC
GND
IB
电气特性(TA=25≈75℃)
符号 参数 条件 最小值 典型 最大值 单位 IDD1 VDD引脚电流 VDD=5V,with all control pins at high -- 1 2 mA IDD2 VDD引脚电流 VDD=5V,with all control pins at low -- 0.1 10 µA IM VDM引脚电流 TA=25℃, with all control pins at low -- 0.2 10 µA
RON H桥导通电阻 IM=0.5A, VDD=VM=5V,
TA=25℃, Rload=8Ω.
-- 1.5 3
Ω IOUT H桥峰值电流 Rload=0Ω, VDD=VM=5V -- 2 -- A VIH 控制脚高电平 VDDx0.8 -- -- V VIL 控制脚低电平 -- -- VDDx0.4 V tOFFC 电荷泵关断时间 VDD=VM=5V, IM=0.5A -- 0.015 1 ms tONH H桥接通时间 -- -- 10 µs tOFFH H桥关断时间 -- -- 5 µs
应用电路图:
逻辑关系表:
输入信号(IA/IB) 电路状态
H L M 正转
L H M 反转
H H M 刹车
L L 待机模式。