马达驱动芯片大全
BDR6133扫地机专用马达驱动芯片
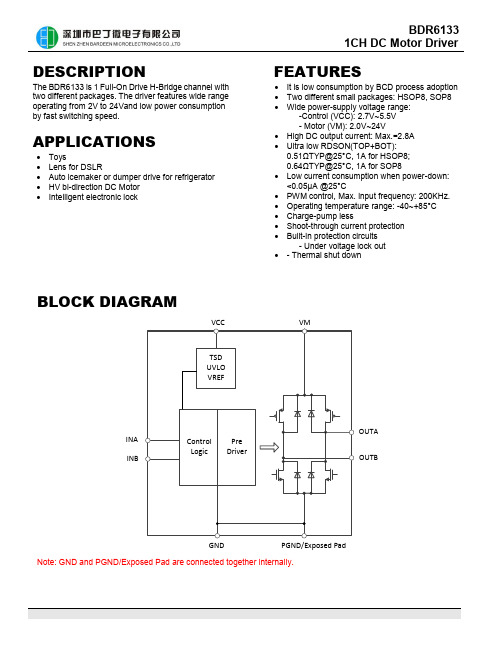
DESCRIPTIONAPPLICATIONS∙ Toys∙ Lens for DSLR∙ Auto icemaker or dumper drive for refrigerator ∙ HV bi-direction DC Motor ∙Intelligent electronic lock- Motor (VM): 2.0V~24V∙ High DC output current: Max.=2.8A ∙ Ultra low RDSON(TOP+BOT): 0.51ΩTYP@25°C , 1A for HSOP8; 0.64ΩTYP@25°C , 1A for SOP8∙ Low current consumption when power-down: <0.05μA @25°C∙ PWM control, Max. input frequency: 200KHz. ∙ Operating temperature range: -40~+85°C ∙ Charge-pump less∙ Shoot-through current protection ∙ Built-in protection circuits- Under voltage lock out ∙ - Thermal shut downBLOCK DIAGRAMINA INBGND PGND/Exposed PadOUTAOUTBNote: GND and PGND/Exposed Pad are connected together internally.APPLICATION CIRCUITSSOP8/HSOP8ORDER INFORMATIONPIN CONFIGURATIONSOP8 HSOP8PIN DESCRIPTIONFUNCTION TABLEINPUT-OUTPUT LOGIC TABLEFUNCTION SEQUENCEVMVCCINAINBOUTAOUTBStandby Reverse Forward Brake Standby Note: VM & VCC power on have no timing sequenceVM & VCC power off have no timing sequencePROTECTION FUNCTIONTHERMAL SHUTDOWN (TSD) CIRCUITThe BDR6133 includes a thermal shutdown circuit, which turns the output transistors off when the junction temperature (Tj) exceeds 175°C (typ.).The output transistors are automatically turned on when Tj cools past the shutdown threshold, which is lowered by a hysteresis of 30°C.TSD = 175°CΔTSD = 30°C* In thermal shutdown mode, the circuits powered by VCC are work normal, and the circuits powered by VM are shut down.UNDER VOLTAGE LOCKOUT (UVLO) CIRCUITThe BDR6133 includes an under voltage lockout circuit, which puts the output transistors in the high-impedance state when VCC decreases to 2.13V (typ.) or lower.The output transistors are automatically turned on when VCC increases past the lockout threshold, which is raised to 2.21 V by a hysteresis of 0.08 V.*In UVLO shutdown mode, a part of circuits powered by VCC are work normal, and the circuits powered by VM are shut down.SHOOT-THROUGH CURRENT PROTECTIONDuring Dead Time (Shoot through current circuit is operated.), Power MOS both of HI side and Low side are turned off. But in this time, internal parasitic diode is turned on according to current direction.ABSOLUTE MAXIMUM RATINGSNotes:1. Terminal OUTA,OUTB pulse with =<200ms:Duty 5%2. Terminal OUTA,OUTB pulse with =<200ms:Duty 1%3. Maximum power dissipation is a function of TJ(max), Rja, and TA. The maximum allowable power dissipation at any allowable ambienttemperature is PD = (TJ(max) − TA)/Rja. Operating at the absolute maximum TJ of 150°C can affect reliability.4. The package thermal impedance for HSOP8 is calculated in accordance with JEDEC, 2S2P test PCB, Rja=41℃/W5. The package thermal impedance for SOP8 is calculated in accordance with JEDEC, 2S2P test PCB,Rja=113.5℃/W RECOMMENDED OPERATION CONDITIONSELECTRICAL CHARACTERISTICSSWITCHING CHARACTERISTICS WAVEFORMSWITCHING WAVEFORMINAINB100%50%50%100%TfONHTfOFFHDRIVER 90%50%10%-90%-50%-10%TffTfr100%50%50%100%TrONHTrOFFH90%50%10%-90%-50%-10%TrrTrf100%-100%-100%100%Electric current in the OUTA —OUTB direction is being made (+)=forward rotationFig.1 switching characteristics waveformINAINB100%50%TfONHTfOFFHDRIVER90%50%10%Tff100%50%TrONH90%50%10%Trr 100%100%Electric current in the OUTA —OUTB direction is being made (+)=forward rotationFig.2 switching characteristics waveformPCBLAYOUT 8-PIN, HSOP8-PIN, SOPPACKAGE INFORMATION 8-PIN, HSOPNotes:1. Refer to JEDEC MS-012 BA2. All dimensions are in millimeter.8 PINS, SOPNotes:1. Refer to JEDEC MS-012 AA2. All dimensions are in millimeter.。
IAD3988中文 A3988 马达驱动IC
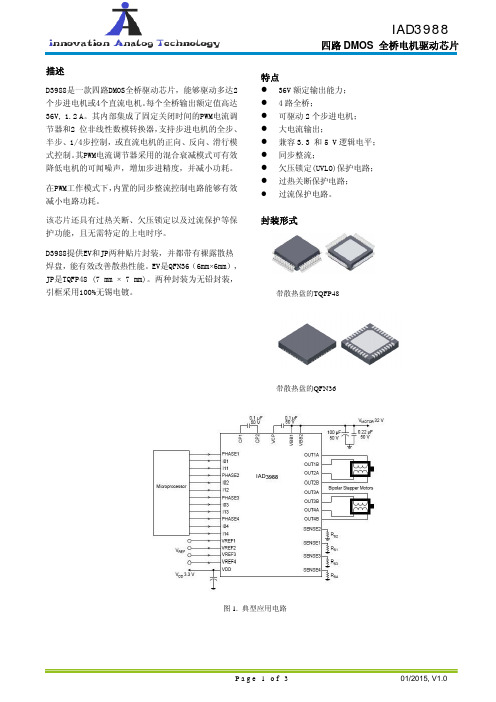
D 3988 四路DMOS 全桥电机驱动芯片图1. 典型应用电路描述D3988是一款四路DMOS全桥驱动芯片,能够驱动多达2个步进电机或4个直流电机。
每个全桥输出额定值高达36V, 1.2 A。
其内部集成了固定关闭时间的PWM电流调节器和2 位非线性数模转换器,支持步进电机的全步、半步、1/4步控制,或直流电机的正向、反向、滑行模式控制。
其PWM电流调节器采用的混合衰减模式可有效降低电机的可闻噪声,增加步进精度,并减小功耗。
在PWM工作模式下,内置的同步整流控制电路能够有效减小电路功耗。
该芯片还具有过热关断、欠压锁定以及过流保护等保护功能,且无需特定的上电时序。
D3988提供EV和JP两种贴片封装,并都带有裸露散热焊盘,能有效改善散热性能。
EV是QFN36(6mm ×6mm),JP是TQFP48 (7 mm × 7 mm)。
两种封装为无铅封装,引框采用100%无锡电镀。
特点● 36V 额定输出能力; ● 4路全桥; ● 可驱动2个步进电机; ● 大电流输出; ● 兼容3.3 和5 V 逻辑电平; ● 同步整流; ● 欠压锁定(UVLO)保护电路; ● 过热关断保护电路;● 过流保护电路。
封装形式 带散热盘的TQFP48 带散热盘的QFN36 IAD订购信息Part Number Package Packing IAD3988PQT 48 pin TQFP with exposed thermal pad 2500 pieces per trayIAD3988SQTR 36 pin QFN with exposed thermal pad 3000 pieces per reel引脚排列图QFN36LQFP48引脚列表QFN36 LQFP48 Pin Name Pin Description2 3 OUT1A DMOS Full-Bridge 1 Output A3 4 SENSE1 Sense Resistor Terminal for Bridge 14 5 OUT1B DMOS Full-Bridge 1 Output B5 6 VBB1 Load Supply Voltage6 8 OUT2B DMOS Full-Bridge 2 Output B7 9 SENSE2 Sense Resistor Terminal for Bridge 28 10 OUT2A DMOS Full-Bridge 2 Output A9 13 PHASE4ControlInput10 14 PHASE3 Control Input11 15 VDD Logic Supply Voltage12 16 VREF1AnalogInput 13 17 VREF2AnalogInput 14 18 VREF3AnalogInput 15 19 VREF4AnalogInput16 20 GND Ground17 21 PHASE2 Control Input18 22 PHASE1ControlInput19 24 I14 Control Input20 27 OUT4A DMOS Full-Bridge 4 Output A21 28 SENSE4 Sense Resistor Terminal for Bridge 422 29 OUT4B DMOS Full-Bridge 4 Output B23 31 VBB2 Load Supply Voltage24 32 OUT3B DMOS Full-Bridge 3 Output B25 33 SENSE3 Sense Resistor Terminal for Bridge 326 34 OUT3A DMOS Full-Bridge 3 Output A27 37 I13 Control Input28 38 I12 Control Input29 39 I11 Control Input30 40 GND Ground31 42 VCP Reservoir Capacitor Terminal32 43 CP1 Charge Pump Capacitor Terminal33 44 CP2 Charge Pump Capacitor Terminal34 45 I01 Control Input35 46 I02 Control Input36 47 I03 Control Input1 48 I04 Control Input1, 2, 7, 11, 12, 23, 25, 26, 30,35, 36, 41NC No ConnectPAD Exposed pad for enhanced thermal perfor-mance. Should be soldered to the PCB.。
TMI8150单芯5通道步进电机驱动芯片多通道驱动芯片

拓尔微TMI8150单芯5通道步进电机驱动器“一芯多驱外围极简”国内最大扫地机驱动芯片原厂拓尔微电子推出了一款体积超小功能高度集成的5通道电机驱动器TMI8150,这颗芯片采用SPI通信控制,内置微细分算法,一芯多驱,更加节省用户资源。
拓尔微TMI8150采用SPI通信控制,仅需MCU提供4根控制线就可以驱动两个步进电机和1个直流电机(或5个直流电机),同时兼容4线和5线步进电机,外围元件仅为2个贴片电容。
内置微细分算法驱动步进电机相比传统达林顿管驱动方案,明显优化了电机运行噪音和抖动问题。
拓尔微TMI8150内置欠压保护、过温保护功能,更好保护客户整机安全。
TMI8150设计参考拓尔微TMI8150参考方案采用5V供电,同时驱动2个步进电机+1个IR cut,单面元件焊接,外围电路极简。
拓尔微TMI8150芯片体积对比1元硬币以及达林顿管。
TMI8150概述拓尔微TMI8150是5通道微细分马达驱动芯片。
在技术性能上,TMI8150最突出的优点是驱动步进电机能做到“无噪音”和“无抖动”,这也是步进电机驱动最重要的两个性能指标。
在系统应用上,TMI8150解决了传统马达驱动IC需求I/O端口过多问题,传统的达林顿+IR cut方案需要10个I/O口,极度浪费主控资源,拓尔微TMI8150将所有电机驱动集成在一起并采用SPI通信控制、CS上升沿检测等方式,将算法固化在芯片内部,主控仅下几条指令即可完成各种工作模式控制,极大的优化主控资源和外围电路。
产品特点:● 内置5路电机驱动器;● 1〜4CH 控制两个步进电机或四个直流电机,5CH 控制一个直流电机或线圈;● 1CH/ 2CH 和3CH / 4CH 具有微步模式。
可调模式为1-2、2-2相步进驱动到最大256分辨率微步;● 2.4V 至5.5V 工作电压; ● 最大连续电流:0.7A ; ● VM 欠压锁定(UVLO ); ● 热关断保护(TSD ); ● 低功耗睡眠模式; ● 自动故障恢复;● 采用小型20引脚QFN 封装(3mmx3mm ,引线间距为0.4mm )。
音圈马达驱动芯片行业概况
音圈马达驱动芯片行业概况
(1)音圈马达驱动芯片分类及功能介绍
音圈马达(Voice Coil Motor, VCM)属于线性直流马达,是用于推动镜头移动产生自动聚焦的装置。
音圈马达按照其功能主要可以分为开环式马达(Open loop)、闭环式马达(Close loop)、中置马达(Alternate)、OIS光学防抖马达(分平移式、移轴式、记忆金属式等)、OIS+Close loop六轴马达等,其中开环式马达、闭环式马达和OIS光学防抖马达是最为常见的三种。
音圈马达驱动芯片(VCM Driver)为与音圈马达匹配的驱动芯片,主要用于控制音圈马达来实现自动聚焦功能,常见的三类芯片包括开环式音圈马达驱动芯片、闭环式音圈马达驱动芯片和OIS光学防抖音圈马达驱动芯片。
(2)音圈马达驱动芯片市场概况
智能手机的摄像头模组是音圈马达驱动芯片的重要应用领域,对智能手机的需求增加以及更高的照片拍摄需求促使目前音圈马达驱动芯片市场保持稳定增长。
根据沙利文统计,2014年到2018年期间,全球音圈马达驱动芯片市场规模的复合年均增长率为4.48%,2018年全球市场规模达到1.43亿美元。
随着双摄像头和前置自动对焦摄像头应用的增加,音圈马达驱动芯片市场规模将进一步增长,预计到2023年全球市场规模将达到2.73亿美元。
霍尔开关MH188电机马达驱动芯片
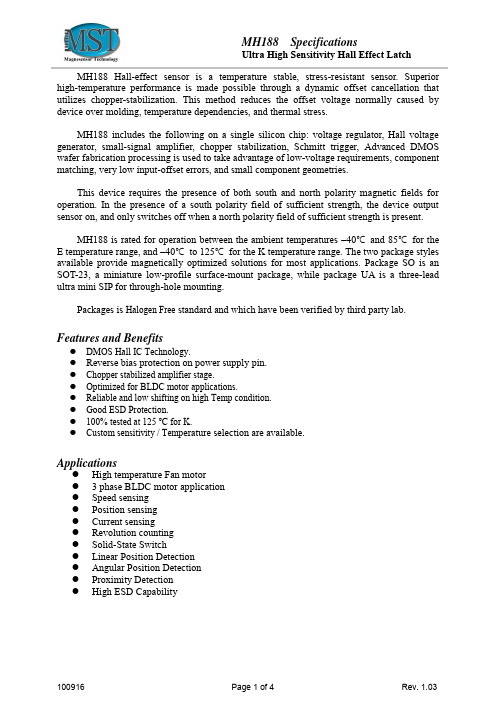
MH188SpecificationsUltra High Sensitivity Hall Effect Latch MH188 Hall-effect sensor is a temperature stable, stress-resistant sensor. Superior high-temperature performance is made possible through a dynamic offset cancellation that utilizes chopper-stabilization. This method reduces the offset voltage normally caused by device over molding, temperature dependencies, and thermal stress.MH188 includes the following on a single silicon chip: voltage regulator, Hall voltage generator, small-signal amplifier, chopper stabilization, Schmitt trigger, Advanced DMOS wafer fabrication processing is used to take advantage of low-voltage requirements, component matching, very low input-offset errors, and small component geometries.This device requires the presence of both south and north polarity magnetic fields for operation. In the presence of a south polarity field of sufficient strength, the device output sensor on, and only switches off when a north polarity field of sufficient strength is present.MH188 is rated for operation between the ambient temperatures –40℃and 85℃for the E temperature range, and –40℃to 125℃for the K temperature range. The two package styles available provide magnetically optimized solutions for most applications. Package SO is an SOT-23, a miniature low-profile surface-mount package, while package UA is a three-lead ultra mini SIP for through-hole mounting.Packages is Halogen Free standard and which have been verified by third party lab. Features and Benefits●DMOS Hall IC Technology.●Reverse bias protection on power supply pin.●Chopper stabilized amplifier stage.●Optimized for BLDC motor applications.●Reliable and low shifting on high Temp condition.●Good ESD Protection.●100% tested at 125 ℃ for K.●Custom sensitivity / Temp erature selection are available.Applications●High temperature Fan motor● 3 phase BLDC motor application●Speed sensing●Position sensing●Current sensing●Revolution counting●Solid-State Switch●Linear Position Detection●Angular Position Detection●Proximity Detection●High ESD CapabilityPart No. Temperature Suffix Package Type MH188KUA K (-40℃ to + 125℃)UA (TO-92S) MH188KSO K (-40℃ to + 125℃)SO (SOT-23) MH188EUA E (-40℃ to + 85℃)UA (TO-92S) MH188ESO E (-40℃ to + 85℃)SO (SOT-23) KUA spec is using in industrial and automotive application. Special Hot Testing is utilized. Functional DiagramNote : Do not apply reverse voltage t o V DD and V OUT Pin, It may be caused for Miss function or damaged device.Electrical SpecificationsTypical application circuitR :1K Ω C1:10nF C2:1nFMH188 SpecificationsUltra High Sensitivity Hall Effect LatchSensor Location, Package Dimension and MarkingMH188 PackageUA Package Hall Chip location188XXXSO Package Hall Plate Chip Location (Top View) (Bottom view)188XX123NOTES:1).Controlling dimension: mm 2).Leads must be free of flash and plating voids 3).Do not bend leads within 1 mm of lead to package interface. 4).PINOUT: Pin 1 V DD Pin 2 GND Pin 3 Output NOTES:1. PINOUT (See Top View at left :)Pin 1 V DDPin 2Output Pin 3 GND2. Controlling dimension: mm3. Lead thickness after solder platingwill be 0.254mm maximumOutput Pin Assignment(Top view)123V DD GND Ou t188XXX1.45Ha ll S e n s r Lo c a tio 1230.9Ha ll S e n s r Lo c a tio nrk。
L9170电机驱动芯片

马达控制驱动芯片L917 0 L9170特点z 微小的待机电流,小于2uA 。
z 工作电压范围宽3.0V~15V.. z 有紧急停止功能 z 有过热保护功能z 有过流嵌流及短路保护功能 z 封装外形为: SOP8L9170是一款DC 双向马达驱动电路,它适用于玩具等类的电机驱动、自动阀门电机驱动、电磁门锁驱动等。
它有两个逻辑输入端子用来控制电机前进、后退及制动。
该电路具有良好的抗干扰性,微小的待机电流、低的输出内阻,同时,他还具有内置二极管能释放感性负载的反向冲击电流。
引脚功能名称脚位7, 8 BO输入真值表2脚前进输入 H L H L极限值参数1脚后退输入5,6脚前进输出7,8脚后退输出 L H L H L H H L L L Open Open单位电源电压输出电流工作温度℃存储温度℃深圳市恒创技术有限公司电话:0755-2708278927083789传真:0755-27084123符号数值马达控制驱动芯片L9170典型最大 2单位uA电特性( 除特殊说明外:Vcc = 6V,Ta = 25℃参数工作电压待机电流静态电流符号 Is Icc条件Vcc = 9V Vi = 0 Vcc = 6V V1 = 3V 负载开路 Vcc = 6V Io = 3A Vcc = 6V Vi =2V Vcc = 6V Vi = 3V最小V OPR0.05 2.20.12 3.5 0.5 70 1000.3 6 0.7 100 150V V V uA uA输出高电平OUT = 6V Io =3A 输出低电平OUT 输入高电平输入低电平输入电流(2V 输入电流(3VViH ViL Ii Ii输出电流SOP8封装, 5,6,7,8脚外要布散热铜片(PCB 板铜片)过热保护温度℃应用线路深圳市恒创技术有限公司电话:0755-2708278927083789传真:0755-27084123。
SGD2021 驱动电流可调和带恒流功能的两通道马达驱动芯片 规格说明书

规格说明书SGD2021 驱动电流可调和带恒流功能的两通道马达驱动芯片版本1.1 希格玛保留不预先通知而修改此文件的权利目录1.概述 (3)2.特性 (3)3.引脚说明 (4)4.管脚功能定义 (4)5.定购信息 (5)6.电气参数 (5)7.应用电路图 (6)7.1小电流和低电压的正负转线路 (6)7.2大电流和高电压的正负转线路 (6)8.封装信息 (8)8.1DIP8封装 (8)8.2ESOP8封装 (9)9.修改记录 (10)1. 概述SGD2021是为控制和驱动直流马达设计的两通道MOSFET功率驱动+驱动电流可调的芯片,其可以控制马达的正转、反转、刹车等功能,可用来代替传统的分立器件驱动电路,使外围器件更精简,智能过温保护加恒流驱动,使整机可靠性更高。
此芯片有两个TTL/CMOS兼容电平的输入端口,具有良好的抗干扰性,同时两个输出端口能直接驱动一个马达正反转或者两个马达的单方向ON/OFF。
此芯片还具有较大的电流驱动力和宽的电源电压范围。
2. 特性宽的电源电压范围:4.2V~16V低导通电阻 800毫欧内置智能过温保护电路内置智能过流保护电路低静态工作电流,小于15uA具有高达1.5A持续驱动电流,3A峰值电流输出编程输出马达需要最大恒流驱动电流带马达启动时自动提高恒流驱动电流可编程调节恒流驱动的PWM频率TTL/CMOS电平输入兼容控制和驱动集成于单片IC之中3. 引脚说明4. 管脚功能定义管脚序号管脚名称功能描述驱动电流调整,恒流电流值:Iset=1.23*200K/Riset1 ISET2 IN1 马达信号输入13 IN2 马达信号输入2固定关断时间调整,悬空是25US,4 OTSET公式:Toff=1/(0.04+14.8/Roffset) us,Roffset单位是KΩ5 GND 电源地6 OUT1 马达驱动输出17 VIN 电源输入8 OUT2 马达驱动输出2输入输出关系表IN1 IN2 OUT1 OUT2 马达动作1 0 H L 正转0 1 L H 反转停止(待机)0 0 L L1 1 H H 刹车5. 定购信息封装规格温度范围定购型号包装运输产品打印ESOP8 -40℃~85℃ SGD2021SH08Tape and Reel2500pcsSGD2021XXXXXXXXXXXXDIP8 -40℃~85℃ SGD2021DH08管装(50PCS/管)SGD2021XXXXXXXXXXXXG:ROHSH:ReachE:ESOP D:DIP86. 电气参数参数典型值单位工作电压 4.2 ~ 16 V待机电流< 15 uA输入高电平> 1.8 V输入低电平< 0.8 V输出持续电流 1.5 A输出峰值电流 3 A 工作温度-40~85 ℃存储温度-50~100 ℃注:驱动马达的恒流值与Riset电阻的关系为 Iset=1.23*200K/Riset,限流电阻的选择最好大于164K(对应电流1.5A)关断时间是25US,如果根据马达特性,调整OTSET的外接电阻,可以调整PWM频率,从而改善整体EMI干扰。
FMRX2BMS 五功能马达驱动IC说明书

概述FMRX2BMS是为遥控汽车等玩具设计的专用单芯片解决方案,该芯片将传统方案的RX2接收解码芯片以及马达驱动芯片整合为单一芯片。
芯片内部集成两路H 桥驱动电路,可同时驱动转向电机以及前进后退电机。
单通道工作时,左转/右转通道用于驱动转向电机,最大持续输出电流达到1.5A,最大峰值输出电流达到2A。
前进/后退通道用于驱动前进后退电机,最大持续输出电流达到1.65A,最大峰值输出电流达到2.5A;双通道同时工作时,左转/右转通道持续输出0.8A的情况下,前进/后退通道能持续输出1.4A。
该芯片具备较宽的工作电压范围(VCC端供电从2V到7.5V),可覆盖2节干电池至5节干电池的应用。
该专用芯片内置过热保护电路。
驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,封装内部芯片的结温将会迅速升高,一旦超过设定值,内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。
内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
特性低静态工作电流;集成的H桥驱动电路;高度集成方案,集成RX2芯片和两个马达驱动芯片;内置2.6V稳压LDO电路;低导通内阻的功率MOSFET管;内置带迟滞效应的过热保护电路(TSD);封装形式:SOP-16典型应用2-5节AA/AAA干电池供电的玩具马达驱动;2-5节镍-氢/镍-镉充电电池供电的玩具马达驱动;1-2节锂电池供电的马达驱动引脚示意图及说明功能框图工作原理FMRX2BMS接收由TX2编码的高频调制信号经外围线路解码的串行码信号,由内部电路进行解码,产生一系列控制信号来控制前进、后退、左转、右转功能。
串行码是由结束码和功能码组成,一组为n+4个脉冲,即结束码为4个W2脉冲,功能码为n个W1脉冲。
其中W2为500Hz,频宽比为3/4,W1为1KHz,频宽比为1/2。
n不同数值分别表示不同的功能。
绝对最大额定值(TA=25℃)注:(1)1通道代表FORWARD和BACKWARD通道,2通道代表RIGHT和LEFT通道。
BDR6122T智能锁专用马达驱动芯片
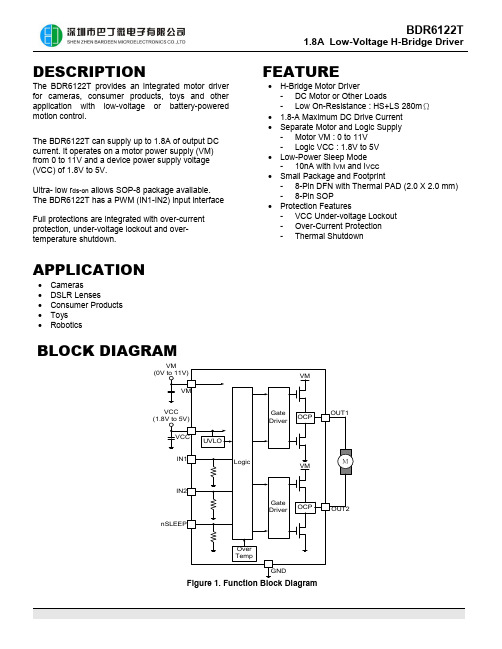
BDR6122T 1.8A Low-Voltage H-Bridge DriverDESCRIPTIONThe BDR6122T provides an integrated motor driver for cameras, consumer products, toys and other application with low-voltage or battery-powered motion control.The BDR6122T can supply up to 1.8A of output DC current. It operates on a motor power supply (VM) from 0 to 11V and a device power supply voltage (VCC) of 1.8V to 5V.Ultra- low r ds-on allows SOP-8 package available. The BDR6122T has a PWM (IN1-IN2) input interface Full protections are integrated with over-current protection, under-voltage lockout and over-temperature shutdown.APPLICATION∙Cameras∙DSLR Lenses∙Consumer Products∙Toys∙Robotics FEATURE∙H-Bridge Motor Driver- DC Motor or Other Loads- Low On-Resistance : HS+LS 280mΩ∙ 1.8-A Maximum DC Drive Current∙Separate Motor and Logic Supply- Motor VM : 0 to 11V- Logic VCC : 1.8V to 5V∙Low-Power Sleep Mode- 10nA with I VM and I VCC∙Small Package and Footprint- 8-Pin DFN with Thermal PAD (2.0 X 2.0 mm) - 8-Pin SOP∙Protection Features- VCC Under-voltage Lockout- Over-Current Protection- Thermal ShutdownBLOCK DIAGRAMFigure 1. Function Block DiagramAPPLICATION CIRCUITFigure 2. Schematic of Application*C3 is optional for better performance. Details are referred to at the chapter “Power Supply Recommendations”.PIN DESCRIPTIONVM OUT1OUT2GNDIN2IN1nSLEEP VCC DFN-8VM OUT1OUT2GNDIN2IN1nSLEEP VCC SOP-8FUNCTION DESCRIPTIONBRIDGE CONTROLThe BDR6122T is controlled using a PWM input interface, also called an IN-IN interface. Each output is controlled by aPROTECTION MANAGEMENTFUNCTIONAL MODESThe BDR6122T is active unless the nSLEEP pin is brought logic low. In sleep mode, the H-bridge FETs are disabledPOWER SUPPLY RECOMMENDATIONSHaving appropriate local bulk capacitance is an important factor in motor-drive system design. It is generally beneficial to have more bulk capacitance.The amount of local bulk capacitor needed depends on the following factors ,∙The highest current required by the motor system.∙The power-supply capacitance and ability to source current∙The amount of parasitic inductance between the power supply and motor system∙The acceptable voltage ripple∙The type of motor used (brushed dc, brushless dc, stepper)∙The motor braking methodThe inductance between the power supply and motor drive system limits the rate at which current can change from the power supply. If the local bulk capacitance is too small, the system responds to excessive current demands or dumps from the motor with a change in voltage. When adequate bulk capacitance is used, the motor voltage remains stable and high current can be quickly supplied.The voltage rating for bulk capacitors should be higher than the operating voltage, to provide margin for cases whenFigure 3. Motor Driver System with External Power SupplyPCB LAYOUTThe VM and VCC should be bypassed to GND using low-ESR ceramic capacitors with recommended value of 0.1µF. These capacitors should be placed as close to the VM and VCC as possible with a thick trace or ground plane connection to GND.0.1uF0.1uFELECTRICALCHARACTERISTICSTIMING REQUIREMENTST A =25℃IN1IN2OUT1OUT2OUTxTYPICAL OPERATING CHARACTERISTICSFigure 12. 50% Duty Cycle , Forward Direction Figure 13. 20% Duty Cycle , Forward Direction Figure 14. 50% Duty Cycle , Reverse Direction Figure 15. 20% Duty Cycle , Reverse DirectionPACKAGE INFORMATION 8-PIN, DFNNote:Refer to JEDEC MO-2298 PINS, SOP, 150MILNotes:1. Refer to JEDEC MS-012AA2. All dimensions are in millimeter。
AT8837 DRV8837中科微马达驱动IC应用资料

描述AT8837为摄像机、消费类产品、玩具和其它低电压或者电池供电的运动控制类应用提供了一个集成的电机驱动器解决方案。
AT8837能够驱动一个直流电机或其他诸如螺线管的器件。
输出驱动模块由N MOS功率管构成的H桥组成,以驱动电机绕组。
AT8837 能够提供高达15V 1A的驱动输出。
AT8837 具有一个PWM (IN/IN) 输入接口。
内部关断功能包含过流保护,短路保护,欠压锁定保护和过温保护,并提供一个错误输出管脚。
AT8837提供一种带有裸露焊盘的DFN-8(2mm*2mm)封装,且是无铅产品,引脚框采用100%无锡电镀。
应用⏹锂电池供电玩具⏹摄像机、相机调焦驱动⏹消费类产品⏹办公自动化设备⏹游戏机⏹机器人型号选择产品型号封装包装AT8837DFN-8编带,5000颗/盘特点●单通道H桥电机驱动器●低RDS(ON)电阻●1A驱动输出●宽电压供电,2.7-15V●脉宽调制(PWM)输入,IN1/IN2 ●支持SLEEP关断休眠●过温关断电路●短路保护●欠压锁定保护封装形式DFN-8典型应用原理图功能结构框图电特性 at Ta = 25°C, VM= 5 V,VCC=3.3V时序要求TA = 25°C, VM = 5 V, VCC = 3.3 V, RL = 20 Ω序号参数说明最小值最大值单位1t1输出使能延迟360ns2t2输出关闭延迟360ns3t3输入到输出上升延迟360ns4t4输入到输出下降延迟360ns5t5上升时间3060ns6t6下降时间3060nsSLEEP 后,芯片使能时间50us模块功能描述AT8837 为单路刷式直流电机或者螺线管提供一种集成的驱动方案。
芯片内部集成单通道 H 桥和电荷泵电路。
AT8837 提供 15V 1A 峰值输出。
简单的 PWM(IN1/IN2)接口允许简单的接口控制电路。
AT8837 还包含一个低功耗睡眠模式,允许不需要驱动芯片的时候节省功耗。
单片机马达驱动方式
单片机马达驱动方式1.引言1.1 概述单片机马达驱动方式是指利用单片机来控制和驱动电动机的方法。
在现代电子设备中,电动机广泛应用于各种场景,如工业自动化、家用电器和机器人等。
马达驱动方式不仅涉及到电动机的控制策略,还需要考虑到电流、转速、扭矩等参数的管理和监控。
随着技术的不断发展,马达驱动方式也在不断创新和演进。
传统的马达驱动方式主要包括直流马达驱动和交流马达驱动。
直流马达驱动方式通过调整直流电压和电流来控制电动机的转速和方向。
交流马达驱动方式则通过变频器和逆变器等装置来将交流电转换为所需的电动机供电。
然而,传统的马达驱动方式存在一些局限性。
首先,它们由于硬件结构的限制,无法在实时性和精确性方面提供较高的控制性能。
其次,它们无法满足复杂的控制算法和系统集成的需求。
为了克服这些限制,单片机马达驱动方式应运而生。
单片机作为一种集成了处理器、存储器和各种输入输出接口的微型计算机,在马达驱动中发挥着重要的作用。
单片机马达驱动方式通过将电动机的控制算法实现在单片机的程序中,并通过输出端口对电动机进行驱动和控制。
相比传统的马达驱动方式,单片机马达驱动方式具有以下优势。
首先,单片机可以实时监测和控制电动机的状态,能够更加灵活地调整马达的速度和转向。
其次,单片机可以通过编程实现复杂的马达控制算法,如闭环控制、反馈控制等,提高马达的稳定性和控制精度。
另外,单片机马达驱动方式还具备可扩展性和可定制化的特点,可以根据具体应用需求进行相应的硬件设计和软件开发。
总之,单片机马达驱动方式在现代电子设备中具有重要的意义和应用价值。
它不仅可以提高马达的控制性能和精度,还能满足不同场景下的马达控制需求。
随着技术的进一步发展,相信单片机马达驱动方式将会得到更广泛的应用和推广。
1.2 文章结构文章结构部分的内容可以是关于本文主要讨论的内容和结构安排的说明。
可以参考以下内容:本文将对单片机马达驱动方式进行探讨和分析。
在引言部分我们会先对马达驱动的概念进行简要概述,介绍单片机在马达控制方面的应用,并给出本文的目的。
直流无刷马达驱动芯片的工作原理和应用

直流无刷马达驱动芯片的工作原理和应用直流无刷马达(BLDC)是一种通过电子驱动器来控制转子位置和速度的电机。
它采用了无刷电机的特点,即无需使用碳刷和换向器,从而降低了摩擦和能量损耗,并提高了效率和可靠性。
而驱动芯片则是控制BLDC马达的关键组件之一,它负责接收控制信号并将其转化为驱动电流,从而实现对马达的控制。
BLDC马达的工作原理是基于磁场的相互作用。
马达内部有一个固定不动的部分称为定子,以及一个可以旋转的部分称为转子。
定子上分布着若干个线圈,称为绕组,通过通电产生磁场。
转子上则有若干个永磁体,它们的磁极分布使得转子上也存在磁场。
当定子磁场和转子磁场相互作用时,会产生电磁力使得转子开始旋转。
BLDC马达的转子位置和速度的控制是通过电子驱动器实现的,而驱动芯片则是电子驱动器的核心部件。
驱动芯片内部包含了若干个功率开关,它们可以根据控制信号进行开关操作,控制电流的流向和大小。
通过切换不同的功率开关,驱动芯片可以实现对马达转子的精确控制。
驱动芯片还可以根据马达的转子位置和速度进行反馈控制,从而实现闭环控制,提高系统的稳定性和响应速度。
BLDC马达驱动芯片的应用非常广泛。
在工业领域,它常用于机床、自动化生产线以及机器人等设备中,用于驱动各种需要精确控制的运动部件。
在家电领域,它常用于洗衣机、冰箱、空调等家电产品中,用于驱动风扇、压缩机等部件。
在电动车和无人机等交通工具中,BLDC马达驱动芯片也发挥着重要的作用,提供高效、可靠的动力输出。
此外,BLDC马达驱动芯片还广泛应用于医疗设备、电动工具、航空航天等领域。
BLDC马达驱动芯片具有许多优点。
首先,它可以实现高效能的驱动,因为无刷电机的摩擦和能量损耗较小。
其次,它具有较长的使用寿命和较高的可靠性,因为无需使用碳刷和换向器。
此外,BLDC 马达驱动芯片还可以实现精确的转子位置和速度控制,从而提高了系统的控制精度和响应速度。
最后,BLDC马达驱动芯片还可以实现闭环控制,提供更加稳定的输出。
马达驱动IC芯片MX214B_Rev1[1].02
![马达驱动IC芯片MX214B_Rev1[1].02](https://img.taocdn.com/s3/m/b2b7a96327d3240c8447efcc.png)
电源电压 持续输出电流 工作温度范围(1) 功耗
(2)
注:(1)、TA 表示电路工作的环境温度; (2)、电路功耗的计算方法为: PD=IOUT×VO(sat)+(IVCC-IOUT) ×VCC+VIA×IIA+VIB×IIB 其中 IOUT 表示电路输出电流,也即驱动马达的电流;VO(sat)表示电路的输出饱和压降;IVCC 表示流 入电源端 VCC 的电流;VCC 表示电源端 VCC 的电压;VIA、VIB 分别表示输入端 IA、IB 的输入电压;IIA、 IIB 分别表示输入端 IA、IB 的输入电流。 上式中电路功耗 PD 大部分由 IOUT×VO(sat)决定,其中电路的输出饱和压降 VO(sat)与输出电流 IOUT 的关 系参考典型参数曲线图 6。假设电机内阻为 RM,则在图 6 中可作出一条直线 VO(sat)= VCC - IOUT×RM,通 过该直线与图 6 中曲线的交点即可得出 VO(sat)、 IOUT。 结合实际应用情况及功耗要求, 确定电机内阻 RM, 进而可选择合适的电机。 为了使电路安全正常工作,必须确保电路功耗在允许的范围之内。
推荐工作条件
(TA=25℃,除另有规定外) 参 数 符号 VCC IOUT TA PD SOP8 DIP8 SOP 封装 DIP 封装 条 件 最 小 3.0 400 -20 范 围 典 型 600 800 最 大 9.0 800 1000 80 625 1250 单位 V mA mA ℃ mW mW
MX214B
封装形式
SOP8:
D A3 A2 A A1 c 0.25
L L1
b b1 E 1 E BASE METAL WITH PLATING SECTIONB-B b e B B c1 c
嘉兴禾润马达驱动芯片应用选型

马达驱动产品选型HR4985-内置转换器和过流保护的微特步进电机驱动芯片描述HR4985是一种便于使用的内部集成了译码器的微特步进电机驱动器。
其设计为能使双极步进电机以全、半、1/4和1/8步进模式工作。
步进模式由逻辑输入MSx 选择。
输出驱动能力达到38V 和±1A。
HR4985包含一个工作在慢衰或混合衰减模式的固定关闭时间的电流调节器。
译码器是HR4985易于实施的关键。
通过STEP简单的输入一个脉冲就可以使电机完成一次步进,省去了相序表,高频控制线及复杂的编程接口。
这使其更适于在没有复杂的微处理器或微处理器负担过重的场合。
在步进操作期间,HR4985的内部电路可以自动的控制其PWM操作工作在快、慢及混合衰减模式。
在混合衰减模式下,器件初始经过一段时间的快衰减后,将切换至慢衰减模式直至固定关闭时间结束。
混合衰减模式控制不但降低了电机工作时产生的噪声,还增加了步进的准确性,同时减小了系统的功耗。
内部的同步整流控制电路改善了PWM操作时的功耗。
内部保护电路包括:带迟滞额过热保护、欠压锁定及过流保护。
不需要特别的上电时序。
HR4985提供一种带有裸露焊盘的QFN-24封装,还有一种是带裸焊盘的TSSOP24,能有效改善散热性能,且是无铅产品,引脚框采用100%无锡电镀。
型号选择特点●低导通电阻R DS(ON)●自动检测并选择电流衰减模式●支持慢衰减和混合衰减模式●降低功耗的同步整流功能●内部欠压锁定●过流保护●兼容3.3V和5V逻辑电平●过热关断电路●对地短路保护●负载短路保护●低电流睡眠模式,<10uA封装形式QFN24TSSOP24应用原理图描述HR4995是一种便于使用的内部集成了译码器的微特步进电机驱动器。
其设计为能使双极步进电机以全、半、1/4和1/16步进模式工作。
步进模式由逻辑输入MSx 选择。
输出驱动能力达到38V 和±1A。
HR4995包含一个工作在慢衰或混合衰减模式的固定关闭时间的电流调节器。
马达驱动IC芯片MX118产品手册

MX118
典型波形图
正转 输入 信号 INA INB
L H L
反转
L H L
刹车
H H
待机
VDD 输出电压 0 (Vout1-Vout2) -VDD
绝对最大额定值(TA=25℃)
参数 最大逻辑和控制电源电压 最大输出电源电压 最大外加输出电压 最大外加输入电压 每通道峰值输出电流 最大功耗 结到环境热阻 θJA 符号 VCC(MAX) VDD(MAX) VOUT(MAX) VIN(MAX) IOUT(PEAK) DIP8 SOP8 DIP8 SOP8 Topr TJ Tstg TLED 值 6.8 6.8 VDD VCC 2.5 1.16 0.67 107 184 -20~+85 150 -55~150 260℃,10 秒 2000V 单位 V V V V A W W ℃/W ℃/W ℃ ℃ ℃
重庆中科芯亿达电子有限公司 深办: 深圳市南山区艺园路 125 号马家龙田厦 IC 产业园 A402
Rev1.53 2011-11-30 2 电话:0755-26099570 传真:0755-26895685
Sinotech Mixic Electronics Co.,LTD
MX118
特别注意事项: 1、MX118 输入级无下拉电阻,测试时两个输入信号不允许悬空。必须连接至电源引脚或者地引脚; 2、MX118 功率电源端附近的去耦电容必须就近连接,必须添加,否则容易造成电路击穿; 3、MX118 功率电源对地去耦电容容质可根据电机适当调整,图中给出的电容值为参考值。 4、图 6 中 OA 与 OB 端连接到地的 104 电容为旁路电容,在三节至四节电池的应用条件下建议添加,该 电容可有效改善因电机快速正、反转切换而引起的电压尖峰击穿输出端口问题。
电机控制芯片BA6209中文资料

电机驱动集成电路可逆电机驱动(BA6209 / BA6209N)BA6209和BA6209N可逆电动机驱动芯片,一般用适合用来刷马达。
两个逻辑输入允许三个输出。
模式:向前、反向和制动。
电机旋转速度可以设置任意通过控制电压。
与电机的控制引脚电压VR。
应用:录像机和盒式磁带录音机特性:1)功率晶体管可以处理大电流最大(用最大电流1.6A);2)当停止电动机制动应用;3)内置函数来吸收所产生的尖峰电流扭转和刹车;4)电动机转速控制引脚;5)很小的待机电流;一般VCC = 12V,IO = 5.5MA。
6)稳定运行期间从模式的变化;向前扭转或反之亦然。
7)与CMOS设备接口。
框图绝对最大额定参数(Ta = 25 °C)推荐的操作条件(Ta = 25°C)电特性(除非另外注明,Ta = 25°C和VCC = 12 v) 电气特性曲线输入/输出真值表:正向/反向控制,被迫停止,冲击电流,吸收是FIN以及控制RIN输入状态。
(1)正向/反向控制电路当FIN高电平,RIN低电平时,电流从OUT1到OUT2下降。
当FIN低电平,RIN高电平时,电流从OUT2到OUT1流动(参照真值表)。
(2)强制停止电路通过设置RIN和FIN都为高电平或都为低电平,能量供应汽车关闭和刹车。
通过吸收发动机反电动势能量。
(3)冲击电流吸收电路当一个高电压(如电机反转)引起的在OUT1和OUT2的产生,一个内部比较器检测到高电压和打开一个内部电路吸收浪涌电流。
(4)驱动电路电机的连接之间的转动方向:OUT1和OUT2对应的电流正向是从OUT1到OUT2流动;反向则是从OUT2到 OUT1流动。
输出电压(Vout)应用于电机是由方程得:V OUT (V) = V ZD _ V CE (sat.) = V ZD _ 0.2 (I OUT = 100mA),其中V ZD是恒定电压的齐纳电压。
二极管(ZD)连接到引脚4;如果参考电压V ref i是开启的,输出电压(Vout)由下式给出方程:V OUT (V) = V CC1 _ V CE (sat.) (PNP) _ 2V F _ V CE (sat.)= V CC1 _ 1.8 (I OUT = 100mA)引脚描述操作记录(1)电阻将集成电路功耗降低集成电路的功率耗散,阻力(约310 w)必须始终VCC和之间的连接电源驱动电路的销。
L9170电机驱动芯片
马达控制驱动芯片L917 0 L9170特点z 微小的待机电流,小于2uA 。
z 工作电压范围宽3.0V~15V.. z 有紧急停止功能 z 有过热保护功能z 有过流嵌流及短路保护功能 z 封装外形为: SOP8L9170是一款DC 双向马达驱动电路,它适用于玩具等类的电机驱动、自动阀门电机驱动、电磁门锁驱动等。
它有两个逻辑输入端子用来控制电机前进、后退及制动。
该电路具有良好的抗干扰性,微小的待机电流、低的输出内阻,同时,他还具有内置二极管能释放感性负载的反向冲击电流。
引脚功能名称脚位7, 8 BO输入真值表2脚前进输入 H L H L极限值参数1脚后退输入5,6脚前进输出7,8脚后退输出 L H L H L H H L L L Open Open单位电源电压输出电流工作温度℃存储温度℃深圳市恒创技术有限公司电话:0755-2708278927083789传真:0755-27084123符号数值马达控制驱动芯片L9170典型最大 2单位uA电特性( 除特殊说明外:Vcc = 6V,Ta = 25℃参数工作电压待机电流静态电流符号 Is Icc条件Vcc = 9V Vi = 0 Vcc = 6V V1 = 3V 负载开路 Vcc = 6V Io = 3A Vcc = 6V Vi =2V Vcc = 6V Vi = 3V最小V OPR0.05 2.20.12 3.5 0.5 70 1000.3 6 0.7 100 150V V V uA uA输出高电平OUT = 6V Io =3A 输出低电平OUT 输入高电平输入低电平输入电流(2V 输入电流(3VViH ViL Ii Ii输出电流SOP8封装, 5,6,7,8脚外要布散热铜片(PCB 板铜片)过热保护温度℃应用线路深圳市恒创技术有限公司电话:0755-2708278927083789传真:0755-27084123。
SA9110 12V 1.2A H桥马达电机驱动芯片 兼容L9110S

SA9110描述SA9110是为低电压下工作的系统而设计的单通道低导通电阻直流电机驱动集成电路。
集成了电机正转/反转/停止/刹车四个功能SA9110内置温度保护功能,当芯片温度超过内部温度保护电路设置得最高温度点后,内部电路关断内置的功率开关管,切断负载电流,避免温度过高造成塑料封装冒烟、起火等安全隐患。
特性⚫ 工作电压范围 2.5-12.0V ⚫ 最大持续电流1.2A,峰值2.0A ⚫低待机电流 (typ.0.1uA)⚫ 低静态工作电流(typ.200uA ) ⚫ 集成过温保护功能; ⚫SOP8封装典型应用⚫ 直流马达驱动 ⚫ 脉冲电磁阀驱动 ⚫ 步进马达驱动 ⚫ 开关功率管SA9110封装和简单应用电路订购信息应用参考电路芯片使用注意事项:1.以上推荐电路及参数仅适用于普通遥控车玩具,其他玩具及电机驱动在使用SA9110时请根据实际情况来使用。
2.持续电流驱动能力受封装形式、VM、芯片差异及环境温度、PCB 材料及厚度等因素影响,规格书给出参数仅供参考。
在实际使用中请根据产品考虑一定的余量。
3.SA9110功率电源端附近的去耦电容必须就近连接,必须添加,否则容易造成电路击穿;功率电源对地去耦电容容值可根据电机适当调整,图中给出的电容值为参考值。
4.OUTA与OUTB端连接到地的104电容为旁路电容,在三节及三节以上电池的应用条件下建议添加,该电容可有效改善因电机快速正、反转切换而引起的电压尖峰击穿输出端口问题。
5.SA9110采用MOS 工艺设计制造,对静电敏感,要求在包装、运输、加工生产等全过程中需注意做好防静电措施。
6.马达启动瞬间的电流值建议不要超过2.0A。
脚位定义 TYPE DESCRIPTION1 OUTA O 输出OUTA2 VM P 电源输入脚,连接10uF或更大电容在VM和地之间3 VM P 电源输入脚,连接10uF或更大电容在VM和地之间4 OUTB O 输出OUTB5 GND P 功率地6 INA I 逻辑输入INA7 INB I 逻辑输入INB8 GND P 功率地绝对最大定额值V输入电压INA,INB -0.3 7.0静电保护(人体模型)VM, INA,INB,OUTA,OUTB 6 kV工作温度T J-40 150C存储温度T stg-65 150热阻θJA100 °C/W 推荐工作范围参数最小最大单位电源电压VM 3.0 12.0V输入电压INA,INB 0 7.0输出电流I OUTA, I OUTB0 1.2 A 电气特性(VM=6.0V, Ta=25゜C)参数测试条件最小值典型值最大值单位导通阻抗R DSON I OUT=0.8A 0.45 0.65 ΩINA/INB高电平输入电压V INH 2.0 7.0V 低电平输入电压V INL0 0.8高电平输入电流I INH25 50uA 低电平输入电流I0 1功能框图输入-输出逻辑表INA INB OUTA OUTB 工作状态工作电流L L Hi-Z Hi-Z 待命状态I VM_OFFH L H L 前进I VM_ONL H L H 后退I VM_ONH H L L 刹车I VM_ON 输入-输出波形应用说明1、基本工作模式a)待机状态在待机状态下,INA=INB=L。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
不可调
0.8欧 160度
0.4欧 150度 有
1欧 有 有
1.5欧 有 没有 没有 没有
有 有 有 有
AHX2021限流控制的优势 1)与其他玩具马达驱动IC比较,达到限制电流后,能够保持恒流输出,保护芯 片和马达不会烧毁,同时电流恒定,使马达维持充沛的动力。 2)限流可以调节,能够满足多种马达的限流要求。 3)在驱动转向马达的情况下,堵转达到限流后,堵转电流不随电源电压变化, 更省电。通过调整限流电阻,很容易匹配各种马达和电池。 4) 在恒流情况下,可进调整PWM频率,从而改善整体EMI干扰。
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021、AHX2023与其他玩具马达驱动芯片的比较
AHX2021 AHX2023 DX5065 KX5008 GPY006A PJ701R PJ9110 PJ9120 PJ9130 RZ7881 RZ7888 RZ7889 RZ7889D
1A 2A 否
0.8A 1.5A 否
3A
3A
1A
2A
3A
3A
1.5A
4A
5A5.Βιβλιοθήκη A否否是是
否
否
否
否
PWM调制 恒流
有
没有,达 到峰值电 流,减小 电流。
没有,依 靠过热限 制电流。 有
没有
没有
没有
没有
没有
没有
有
有
有
限流可调节 内阻 过热保护
外置电路 调节
外置电路 调节
不可调
不可调
不可调
不可调
不可调
工作范围 最大驱动电 流 峰值电流 是否外界功 率管 限流控制
4.2~16V
4.2~16V
1.3~6.5V
1.5~5.5V
1.8~3.6V
1.8~5.5V
2~12V
2~12V
2~12V
2.4~9V
3~11V
3~15V
3~15V
1.5A 3A 否
3.0A 6A 否
1.8A
1.2A 2A
0.55A 0.8A 否
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021和AHX2023工作模式
工作模式:
输入 IN1 L H L H IN2 L L H H
输出 OUT1 OUT2 Z H L L Z L H L
MODE 待机 前进 后退 刹车
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021控制玩具车前驱转向马达的优势
•
•
• •
一、驱动能力较强。前进或后退按键后的500ms内,马达限流值为1.5倍的ILIM,这段 时间电流能力较大可以提供马达快速启动所需的能量。在转向马达驱动过程中,1.5倍 ILIM电流驱动能力,使马达具有产生充沛的动力,然后保持ILIM的恒流输出,达到节电 的效果。 二、先进的恒流技术。500mS之后的时间马达限流值为ILIM。这样在做前驱转向马达 时,堵转电流可以通过更改ISET的值来调节,而不用通过大功率电阻分压来降低马达 两端的电压来实现堵转电流的控制。AHX2021特有的PWM恒流控制技术使前驱转向马 达的功耗更低,效率更高。通过调节限流电阻,能够满足多种马达和不同工作电压下 的限流要求。 三、导通内阻较低。AHX2021导通内阻为800毫欧,降低了马达工作时的损耗。 四、工作电压范围宽。AHX2021工作电压在4.2V到16V之间,前驱转向马达驱动电路 应用范围更广。
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2023控制玩具车后驱马达的优势
• • •
一、驱动能力强。AHX2023可以驱动峰值输出电流6A以内,持续输出电流3A以内的马 达。前进或后退按键后的500ms内,马达限流值为2.0倍的ILIM,这段时间电流能力较 大可以提供马达快速启动所需的能量。500mS之后的时间马达限流值为ILIM。 二、导通内阻低。AHX2023导通内阻为400毫欧,进一步降低了马达工作时的损耗, 能量转换效率更高。 三、工作电压范围宽。由于AHX2023工作电压在4.2V到16V之间,这样马达驱动电路 应用范围更广。
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021应用电路
AHX2021驱动双向马达应用电路:
AHX2021
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2021驱动马达工作在“前进”→“后退”模式限流1A时的波形
注:“前进模式”和“后退模式”中前500mS,马达限流为1.5倍的ILIM。(RSET=1.23*220k/ILIM)
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2023应用电路
AHX2023驱动双向马达应用电路:
AHX2023
深圳市安浩芯科技有限公司
TEL:23008750
李‘S 13600161955
AHX2023驱动马达工作在“前进”→“后退”模式限流3A时的波形
注:“前进模式”和“后退模式”中前500mS,马达限流为2倍的ILIM。(RSET=1.23*200k/ILIM)