多智能体系统一致性综述
非线性多智能体系统的间歇采样控制一致性研究
中文摘要中文摘要由于通信网络以及分布式控制的快速发展,多智能体系统的一致性研究成为系统与控制领域的研究热点,受到了国内外学者的广泛关注。
多智能体系统的一致性是指系统中每个智能体通过通信网络传递信息,使其在位置或者速度等状态量上趋于渐近相同,呈现出行为状态的一致,被广泛的应用于多无人机编队、多卫星角度校正、多传感器网络同步等。
由于现实世界中存在噪声、空气阻力等非线性因素,这些因素常常会给多智能体系统的一致性造成一定的影响,因此考虑带有非线性因素的多智能体系统的一致性具有重要意义。
在一致性控制策略的设计中,采样控制策略能降低控制器的更新频率,但控制器在每个控制时间段内依然要连续工作,而间歇控制策略可以减少控制器的工作时间,因此将采样控制和间歇控制策略相结合有利于统一考虑控制器的更新频率和工作时间。
本文研究基于间歇采样控制策略的非线性多智能体系统一致性问题,具体内容如下:首先,针对带有非线性因素的一阶多智能体系统,分别采用了周期间歇采样控制策略和非周期间歇采样控制策略,通过矩阵理论以及不等式的证明等得到了系统实现一致的充分性条件,从理论上分析证明了所设计的控制策略的可行性。
最后利用数值仿真验证了理论结果的有效性,并通过仿真结果进一步剖析得知,通信宽度和采样宽度对系统状态达到一致起着至关重要的作用。
其次,在以运动学为背景的物理世界中,研究带有非线性因素的二阶多智能体系统更符合实际情况。
并运用间歇采样控制策略,通过严格的理论证明,得到了二阶非线性多智能体系统达到一致的充分条件。
最后利用数值仿真验证了一致性理论的有效性,使得多智能体一致性算法具有更强的实用价值。
最后,为了进一步验证所研究的一致性算法的实用性,基于Anylogic软件仿真平台,搭建了多无人机系统一致性的虚拟原型环境,模拟多智能体之间信息交流,最后通过一致性耦合运算实现了无人机系统的一致性运动,从而验证了一致性理论的可行性。
关键词:多智能体系统;非线性;间歇采样控制;一致性;Anylogic仿真IABSTRACTABSTRACTDue to the rapid development of communication network and distributed control,the research on the consensus of multi-agent systems has become a hot topic in the field of systems and control,which has been widely concerned by scholars at home and abroad.A multi-agent system is a set of systems that work in a network environment and have multiple autonomous individuals.Consensus means that each intelligence in a system transmits information through a communication network to make it asymptotically identical in terms of position or velocity,showing a consensus behavior,and is widely used in multi-UA V formation,multi-satellite angle correction,multi-sensor network synchronization and so on.Because there are nonlinear factors such as noise and air resistance in the real world,these factors often affect the consensus of multi-agent systems, so it is important to consider the consensus of multi-agent systems with nonlinear factors.In the consensus analysis of nonlinear multi-agent systems,the sampled-data control strategy can reduce the update frequency of the controller, but the controller still has to work continuously in each control time period,and the intermittent control strategy can reduce the working time of the controller, Therefore,the combination of sampled-data control and intermittent control strategy is beneficial to consider the update frequency and working time of the controller consensus.This paper studies the consensus problem of nonlinear multi-agent system based on intermittent sampled-data control strategy,the details of the paper are as follows:Firstly,for the first-order multi-agent system with nonlinear factors,the control strategy of periodic intermittent sampled-data and aperiodic intermittent sampled-data are adopted respectively.By means of matrix theory and the proof of inequality,we get the conditions for the system to achieve consensus adequacy.the feasibility of the designed control strategy is proved by theoretical analysis.Finally,numerical simulation is used to verify the validity of theIII非线性多智能体系统的间歇采样控制一致性研究theoretical results,and further analysis of the simulation results shows that the communication width and sampled-data width play a vital role in the system state to achieve consensus.Secondly,in the physical world with kinematics as the background,it is more realistic to study the second-order multi-agent system with nonlinear factors.By using the intermittent sampled-data control strategy,it is proved by strict theory that the consensus condition of the second-order nonlinear multi-agent system.Finally,the validity of the consensus theory is verified by numerical simulation,which makes the multi-agent consensus algorithm more practical.Finally,in order to further verify the practicability of the studied consensus algorithm,based on the above theoretical results,based on the Anylogic software simulation platform,a virtual prototype environment of multi-UA V system consensus is built,and the information exchange between multi-agent is simulated.Finally,the consensus motion of UAV system is realized by consensus coupling operation,which verifies the feasibility of consensus theory. Key words:Multi-agent systems;Nonlinear;Intermittent sampled-data control; Consensus;Anylogic simulationIV目录目录第一章绪论 (1)1.1课题背景及研究意义 (1)1.2多智能体系统一致性简介 (2)1.3一致性问题研究现状及分析 (3)1.4基于间歇采样控制的一致性研究概况 (6)1.4.1基于采样控制的一致性 (6)1.4.2基于间歇控制的一致性 (6)1.5本文研究内容及结构安排 (7)第二章预备知识 (9)2.1基本符号 (9)2.2代数图论 (10)2.3一致性相关理论 (13)2.4本章小结 (14)第三章一阶非线性多智能体系统间歇采样控制的一致性 (15)3.1引言 (15)3.2系统模型的建立及预备知识 (15)3.3周期间歇采样控制策略 (18)3.4非周期间歇采样控制策略 (20)3.5数值仿真 (23)3.6本章小结 (28)第四章二阶非线性多智能体系统间歇采样控制的一致性 (29)4.1引言 (29)4.2系统模型的建立及预备知识 (29)4.3理论分析与证明 (32)4.4数值仿真 (34)4.5本章小结 (39)第五章基于Anylogic的多智能体系统一致性仿真 (41)5.1引言 (41)5.2无人机系统仿真平台创建 (42)V非线性多智能体系统的间歇采样控制一致性研究5.3无人机系统仿真前端设计 (45)5.4无人机系统仿真实验结果 (49)5.5本章小结 (52)第六章总结与展望 (53)6.1全文总结 (53)6.2工作展望 (53)参考文献 (55)致谢 (61)攻读学位期间发表的学术论文目录 (63)VI第一章绪论1第一章绪论1.1课题背景及研究意义洞察自然界,随处可见许多奇妙有趣的现象。
异构非线性多智能体系统的一致性
Advances in Applied Mathematics 应用数学进展, 2023, 12(9), 3872-3885 Published Online September 2023 in Hans. https:///journal/aam https:///10.12677/aam.2023.129381异构非线性多智能体系统的一致性谢浩浩,李超越,贺 鑫长安大学理学院,陕西 西安收稿日期:2023年8月9日;录用日期:2023年9月3日;发布日期:2023年9月8日摘要针对一阶智能体和二阶智能体组成的异构多智能体系统,在无向通讯拓扑下研究了具有输入饱和与非输入饱和的异构非线性多智能体系统的一致性问题。
首先,分别提出了基于牵制控制和事件触发控制的一致性控制协议,其次,通过对每个智能体设计事件触发条件,当满足事件触发条件时,智能体才向周围的邻居传递自身的状态信息和更新控制器,且每个智能体只在自己的触发时刻进行传递和更新。
然后利用图论、Lyapunov 稳定性理论和LaSalle 不变集理论,证明了在满足某些条件下,该系统不仅达到了期望的一致性状态,而且减少了控制器的更新次数,有效地节省了通讯资源。
最后,通过数值模拟验证了理论的正确性。
关键词异构多智能体系统,牵制控制,事件触发控制,一致性,饱和输入,非线性Consensus of Heterogeneous Nonlinear Multi-Agent SystemsHaohao Xie, Chaoyue Li, Xin HeSchool of Sciences, Chang’an University, Xi’an ShaanxiReceived: Aug. 9th , 2023; accepted: Sep. 3rd , 2023; published: Sep. 8th, 2023AbstractThe consensus problem of heterogeneous nonlinear multi-agent systems with and without input saturation is investigated under the undirected communication topology for heterogeneous mul-ti-agent systems composed of first-order agents and second-order agents. First, consensus control protocols based on pinning control and event-triggered control are proposed respectively, and second, by designing event-triggered conditions for each agent, the agent transmits its own state information and updates its controller to its surrounding neighbors only when the event-triggered谢浩浩等conditions are satisfied, and each agent transmits and updates only at its own triggering moments. Then using graph theory, Lyapunov stability theory and LaSalle invariance principle, it is proved that the systems not only achieve the desired consensus state, but also reduce the number of con-troller updates and effectively save the communication resources under the fulfillment of certain conditions. Finally, the correctness of the theory is verified by numerical simulation. KeywordsHeterogeneous Multi-Agent Systems, Pinning Control, Event-Triggered Control, Consensus, Saturated Inputs, NonlinearThis work is licensed under the Creative Commons Attribution International License (CC BY 4.0)./licenses/by/4.0/1. 引言近年来,多智能体系统的一致性问题引起了学者们的广泛关注,并且在传感器网络[1]、编队控制[2]、群居昆虫的集群[3]、机器人[4]等具有广泛的实际应用价值。
多智能体系统一致性研究
多智能体系统一致性研究作者:杨瑞叶冬来源:《山东工业技术》2017年第07期摘要:近年来,多智能体系统一致性问题得到越来越多科学家的重视,其理论成果广泛用于各个领域,本文在前人研究成果基础上,利用代数图论等预备知识,通过建立二阶多智能体系统模型,侧重分析讨论了载没有和有虚拟领导者的两种状态下二阶智能体的一致性问题,并简单给出了一致性协议,这个协议能够令多智能体系统达到一致性收敛,同时利用仿真证明上述理论的正确性。
关键词:多智能体;一致性;二阶系统DOI:10.16640/ki.37-1222/t.2017.07.1161 引言多智能体系统作为分布式人工智能的一个重要分支,目的在于处理复杂的现实问题,如时下比较引人关注的马航MH370失踪问题。
一致性研究在计算机科学中有很长的历史,就多智能体系统而言,如果系统中全部的智能体在所关心的认定数量特性中能够达到同一个值的情况称为一致性。
多智能体完成某一具体任务的前提条件就是其能够达到一致性,只有达到一致性,该系统才能够更快适应周围环境变化(邻居或周边),才能更加准确的完成规定动作。
因此,对于多智能体系统的一致性研究有着现实意义。
2 预备知识与相关理论2.1 代数图论相关知识一般情况,在分析多智能体系统时,通常用数图论来表示各个智能体间的通信。
对于有N 个智能体的多智能体系统,在代数图论中,令其图为,其中,节点集合(即智能体集合),通讯边集合,称为单独一条通讯边,意思是指智能体可以将信息传送给智能体,把称为的一个邻居。
对于任意的节点,若满足,则称这种图为无向图,否则,称为有向图。
在无向图中,智能体之间可以相互接收信息,图中全部节点的出入度都相等,因此无向图也被看作一个平衡图。
而有向树存在于有向图中,它是一种特殊的图结构。
在有向树中,除了一个顶点是源顶点外其余的每一个顶点有且只有一个邻居。
2.2 Lyapunov稳定性定理如果动力系统任何初始条件在平衡态附近的轨迹均能维持在平衡态附近,那么该系统可以称为在处李雅普诺夫(Lyapunov)稳定。
多智能体系统一致性问题概述

生物学家Winfree指出耦合振子(Coupled Oscillators)系统同步问题可以简化为研究相 耦合振子 位变化问题。相关文献中分析了非线性耦合振 系统同步 子系统Kuramoto 模型的稳定性,基于一致性 理论,得到了确定和不确定振荡频率情况下振 子系统取得同步的结论。
LOGO
多智能体系统一致性问题概述
多智能体一致性问题综述
多智能体系统
一致性问题描述
一致性协议
一致性理论应用领域
一致性理论发展趋势展望
多智能体系统
定义: 多智能体系统是由多个可计算的智能体组成的 集合,其中每一个智能体是一个物理或抽象的实 体,并能通过感应器感知周围的环境,效应器作 用于自身,并能与其他智能体进行通讯的实体 研究多智能体系统的主要目的 期望通过大规模的智能体之间的合作协调来代 替昂贵的单个系统(卫星、机器人、无人驾驶飞 行器、自治水下潜艇等)完成复杂的任务。 在合作控制问题中,智能体之间通过无线网络 或者在初始时刻预输入来共享信息,这些信息包 括相同的控制算法,共同的目标,或者相对的位 置信息。
一致性理论应用领域
编队 控应用 典型领域之一,基于相应的一致性协 议,研究无人机等多智能体系统中高 度保持,编队稳定等性能
在多智能体蜂拥(Flocking)算法应用中 ,一致性算法主要用于实现多智能体间 的速度匹配,在以相同速度运动的前提 下,多智能体间保持一定的距离以避免 相互碰撞。
聚集问题(Rendezvous Problem)是指一 群移动的智能体,通过设计局部控制策 略使得所有的智能体最后能够同时在指 定位置聚集
多智能体系统一致性问题研究的开题报告

多智能体系统一致性问题研究的开题报告一、选题背景多智能体系统在交通、通信、制造、航空等领域中得到广泛应用。
多智能体系统的研究涉及到许多问题,其中一致性问题是其中的一个重要问题。
一致性问题是指多个智能体在不同的状态下,通过信息交互和状态更新,实现系统的统一行动。
因此,对多智能体系统一致性问题的研究有着重要的理论和实际意义。
二、研究目的本研究的主要目的是探究多智能体系统中的一致性问题,特别是在实际应用中的场景下,设计一种适用的多智能体协议,以实现系统的一致性。
三、研究内容1.对多智能体系统中的一致性问题进行理论分析和总结。
2.研究多智能体系统中的一致性问题的数学模型和算法。
3.设计一种适用于实际应用场景下的多智能体协议,以实现系统的一致性。
4.通过仿真实验验证所设计的多智能体协议的可行性和有效性。
四、研究方法1.理论分析和总结。
2.数学建模和算法设计。
3.计算机仿真。
五、预期成果1.分析多智能体系统中一致性问题的理论基础。
2.设计一种适用于实际场景下的多智能体协议,以实现系统的一致性。
3.通过仿真实验验证所设计的多智能体协议的可行性和有效性。
六、进度安排第一阶段:2021年9月——2021年12月深入了解多智能体系统中的一致性问题,分析多智能体协议的理论基础,并进行数学建模和算法设计。
第二阶段:2022年1月——2022年6月设计一种适用于实际场景下的多智能体协议,并进行仿真实验。
第三阶段:2022年7月——2022年12月综合分析仿真实验结果,并进行总结撰写论文。
七、论文组成1.绪论:介绍多智能体系统的一致性问题和研究意义。
2.相关理论:分析多智能体系统的数学模型和算法。
3.多智能体协议设计:设计一种适用于实际场景下的多智能体协议。
4.仿真实验:验证所设计的多智能体协议的可行性和有效性。
5.总结与展望:总结本研究工作,展望未来研究方向。
八、参考文献[1] Hong, Y., & Hu, J. (2014). Tracking of multiple nonholonomic agents with a virtual leader. IEEE Transactions on Automatic Control,59(8), 2104-2109.[2] Li, G., & Wang, L. (2017). Consensus of multi-agent systems with intermittent communication: a domain system approach. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 47(3), 423-437.[3] Ren, W., & Beard, R. W. (2008). Distributed consensus in multi-vehicle cooperative control: theory and applications. Springer Science & Business Media.[4] Wang, L., Hong, Y., & Hu, J. (2013). Distributed coordination of multiple mobile agents with double-integrator dynamics. IEEE Transactions on Automatic Control, 58(5), 1227-1232.[5] Zhang, W., Meng, Z., & Li, J. (2019). Containment control for heterogeneous multi-agent systems with dynamic topology. Information Sciences, 479, 441-451.。
多智能体系统一致性与复杂网络同步控制研究

多智能体系统一致性与复杂网络同步控制研究多智能体系统一致性与复杂网络同步控制研究是最近几年来非常热门的研究领域之一。
这个领域的研究主要考虑如何在多智能体系统中实现一致性或复杂网络同步控制,以进一步提高多智能体系统的性能和稳定性。
在这篇文章中,我们将介绍多智能体系统一致性与复杂网络同步控制的概念和应用,以及相关的研究成果。
一、多智能体系统一致性的概念与应用多智能体系统是由多个智能体组成的集合体,每个智能体都可以感知和与其他智能体交互。
而多智能体系统的一致性,则是指多个智能体在系统中具有相同的行为或状态,包括位置、速度、角度等。
一致性在多智能体协同控制、功率系统调度、无线传感器网络等领域都有着广泛的应用。
在多智能体系统中,当智能体之间的通讯或行为出现差异或偏差时,就会导致系统中出现不一致的现象。
为了实现多智能体一致性,研究者们提出了许多不同的控制算法和方法,包括基于分布式控制的一致性方法、基于图论的控制方法以及基于协同点控制的方法等。
其中,基于分布式控制的一致性方法是最为常见和重要的方法之一。
这种方法利用智能体之间的信息交换来实现一致性。
例如,在分布式控制算法中,每个智能体的控制器只依赖于相邻智能体发来的信息,通过控制输入对自身状态进行调整,从而实现整个系统的一致性,这种方法就称为基于局部信息交换的分布式一致性控制。
除此之外,还有一些其他的控制方法也被广泛应用于多智能体系统的一致性控制中。
比如,在无线传感器网络中,基于时序协议的一致性控制方法不仅能够提高网络节点间的信息交互速度,而且还能够避免网络中的数据冲突问题。
二、复杂网络同步控制的概念与应用与多智能体系统一致性控制类似,复杂网络同步控制也是一种协同控制方法。
同时,复杂网络同步控制也是针对网络系统中的一致性问题展开研究的。
复杂网络同步控制的概念是指,在一个复杂网络中,网络中的节点能够在同一时刻达到相同的状态,从而实现整个网络的同步控制。
例如,在物理网络、信息网络、通信网络等领域都有着复杂网络同步控制的应用。
多智能体系统一致性问题概述

多智能体系统的研究内容和方法
理论体系
多智能体系统的研究需要建立完善的理论体系,包括智能体的感知 与决策、智能体的通信与协调、智能体的学习与优化等方面。
算法设计
多智能体系统的算法设计是关键,需要设计高效的算法以实现智能 体的自主决策和协同工作。
实验验证
多智能体系统的研究需要进行实验验证,通过实际应用和测试来评估 系统的性能和效果。
意义
解决多智能体系统一致性问题有助于提高系统的协同性能,增强系统的可靠性和鲁棒性,为实际应用提供理论支 持和技术指导。
研究现状和发展趋势
研究现状
目前,多智能体系统一致性问题已经得到了广泛关注,国内外学者在理论研究和算法设 计方面取得了一系列成果。常见的算法包括基于线性系统的协议设计、基于优化理论的
研究局限性和不足之处
现有的研究成果主要集中在理论层面,实际应用中仍存在诸多挑战,如通 信延迟、节点故障和能量限制等。
对于复杂环境和动态变化的情况,现有的一致性算法可能无法保证系统的 稳定性和性能。
在实际应用中,多智能体系统的一致性问题还需要考虑安全性和隐私保护 等方面的问题,这些方面在现有研究中尚未得到充分关注。
一致性问题的分类
• 总结词:一致性问题可以根据不同的分类标准进行分类,如按照一致性的目标 、一致性的程度、一致性的实现方式等。
• 详细描述:根据一致性的目标,可以将一致性问题分为目标一致性和状态一致 性。目标一致性是指多个智能体在某一特定目标上达成一致,而状态一致性是 指多个智能体在某一特定状态上达成一致。根据一致性的程度,可以将一致性 问题分为强一致性和弱一致性。强一致性是指多个智能体在某一特定目标或状 态上完全一致,而弱一致性则是指多个智能体在某一特定目标或状态上基本一 致,但不一定完全相同。根据一致性的实现方式,可以将一致性问题分为分布 式一致性和集中式一致性。分布式一致性是指多个智能体通过各自的信息交互 和协作实现一致性,而集中式一致性则是指通过一个中心节点来协调多个智能 体的行为实现一致性。
多智能体的一致性问题报告

多智能体的一致性问题的研究报多智能体的一致性问题的研究报告指导老师:唐斌报告人:黄建安多智能体技术应用综述多智能体系统是由多个可计算的智能体组成的集合,其中每一个智能体是一个物理或抽象的实体,并能通过感应器感知周围的环境和效应器作用于自身,并能与其他智能体进行通讯的实体。
作用于自身,并能与其他智能体进行通讯的实体。
多智能体技术是通过采用各智能体间的通讯、合作、协调、调度、管理以及控制来表述实际系统的结构、功能及行为特性。
近年来,随着应用的需要和技术的发展,多智能体的协调控制在世界范围内掀起了研究的热潮。
智能体的分布式协调控制能力是多智能体系统的基础,是发挥多智能体系统优势的关键,也是整个系础,是发挥多智能体系统优势的关键,也是整个系统智能性的体现。
作为多智能体协调控制的问题的基础,一致性问题主要是研究如何基于多智能体系统中个体之间有限的信息交换,来设计的算法,使得所有的智能体的状态达到某同一状态的问题。
一致性协议问题作为智能体之间相互作用、传递信息的规则,它描述了每个智能体和与其相邻的智能体的信息交换过程。
多智能体的一致性问题的发展:1995年,Vicsek等人提出了一个经典的模型来模拟粒子涌现出的一致性行为的现象,并且通过仿真得到了一些很实用的结果。
之后,Jadbabaie等人首先应用矩阵方法对该模型进行了理论分析,发现只要再网络保持连通时,系统最终会趋于一致。
然后,有理论最早提出了一致性问题的理论框架,设计了最一般的一致性算法,发现网络的代数连通度表征了系统收敛的速度,给出了算法达到平均一致性的条件,并将结果扩展到时滞的对称一致性算法。
进一步,Ren与Beard等提出了一致性搜索问题并给出了理论分析。
Moreeau应用凸性收敛进行了理论分析并给出了存在时滞的不对称一致性算法收敛结果。
经过以上大量的研究分析表明,当网络为固定拓扑结构时,只要网络保持连通,连续一致性算法最终会趋于一致;当网络为切换拓扑结构时,如果在有限时间内,存在有网络拓扑结构的并组成的序列,并且所有这些图的并都保持连通,则一致性算法最终也会收敛到一致。
多智能体系统一致性若干问题的研究

多智能体系统一致性若干问题的研究一、概述在现代科技飞速发展的今天,多智能体系统已成为机器人协作、无人机编队、智能交通等领域中的研究热点。
这类系统由多个智能体组成,每个智能体具备自主决策和协同工作的能力,通过相互间的信息交互和协调,以实现共同的目标。
而在多智能体系统的运作过程中,如何实现各智能体之间的一致性,成为了关键的问题之一。
多智能体系统一致性问题的研究,主要关注如何通过设计合适的分布式控制算法,使得系统中的各个智能体在局部信息交互的基础上,能够实现状态或行为的趋于一致。
这一问题的研究不仅有助于提高系统的协同性能,增强系统的可靠性和鲁棒性,同时也为实际应用提供了理论支持和技术指导。
近年来,随着人工智能技术的不断进步,多智能体系统一致性问题的研究取得了显著的成果。
研究者们提出了各种算法和技术,如基于线性系统的协议设计、基于优化理论的方法、基于博弈论的策略等,以应对不同场景下的一致性需求。
尽管取得了一些进展,但多智能体系统一致性问题仍然面临着诸多挑战。
多智能体系统的复杂性和动态性使得一致性的实现变得尤为困难。
系统中的智能体可能受到各种因素的影响,如通信延迟、噪声干扰、环境变化等,这些因素都可能对一致性的实现产生不利影响。
随着系统规模的扩大,如何设计高效的分布式控制算法,以保证系统的一致性和稳定性,也是一个亟待解决的问题。
本文旨在深入探讨多智能体系统一致性的若干问题,分析现有算法和技术的优缺点,提出新的解决方案和改进措施。
通过本文的研究,我们期望能够为多智能体系统一致性的实现提供更加有效的理论支持和实践指导,推动该领域的研究和应用不断向前发展。
1. 多智能体系统的定义与特点多智能体系统(MultiAgent System, MAS)是由多个具备一定自主性和交互能力的智能体所组成的集合,这些智能体通过相互之间的信息交换和协作,共同解决复杂的问题或完成特定的任务。
每个智能体都可以视为一个独立的计算实体,具备感知、推理、决策和行动的能力,能够在系统中独立操作或与其他智能体进行协同工作。
多智能体系统一致性问题概述

多智能体系统一致 性问题的研究方法
基于模型的方法:通过建立模型来描述多智能体系统的行为和特性 基于实验的方法:通过实验来观察和验证多智能体系统的一致性问题 基于仿真的方法:通过仿真来模拟多智能体系统的行为和特性 基于数据分析的方法:通过对多智能体系统的数据进行分析来研究其一致性问题
设计实验方案:确 定实验目的、实验 对象、实验条件等
组成:多智能体系统由多个智能体、环 境、任务和通信网络组成。
智能体:智能体是具有自主决策和执行 能力的实体可以是机器人、无人机、无 人车等。
环境:环境是智能体所处的物理或虚拟 空间可以是现实世界、虚拟世界或混合 世界。
任务:任务是智能体需要完成的目标或 需求可以是导航、搜索、救援等。
通信网络:通信网络是智能体之间进行 信息交换的媒介可以是有线网络、无线 网络或混合网络。
直接交互:智 能体之间直接 进行信息交换
间接交互:智 能体通过第三 方进行信息交
换
协同交互:多 个智能体共同 完成一项任务
竞争交互:多 个智能体竞争 完成一项任务
合作交互:多 个智能体合作 完成一项任务
混合交互:智 能体之间采用 多种交互方式
智能体:具有自主决策和执行能力的实体 行为:智能体根据环境信息和自身状态做出的动作或决策 决策:智能体根据目标和约束条件选择最优策略或行动方案 学习:智能体通过与环境的交互不断学习和改进其行为和决策
一致性问题
解决方案:采 用多智能体系 统一致性算法 提高机器人协 作效率和稳定
性
结论与展望
多智能体系统一致性 问题的研究现状
存在的问题和挑战
研究成果和创新点
未来研究方向和展望
智能体系统的统一性研究:如何实现不同智能体系统之间的统一和协调
基于观测器的多智能体系统一致性
西安电子科技大学硕士学位论文基于观测器的多智能体系统一致性姓名:***申请学位级别:硕士专业:运筹学与控制论指导教师:***201201摘要由于在军事和民用方面的广泛应用,多智能体系统的分布控制已经成为了一个热门的研究领域。
一致性问题是多智能体系统分布控制研究中的基本问题之一,是发展其它一些协调控制问题的基础。
本文研究了二阶多智能体系统的一致性问题,针对某些信息不可测的情形,我们进一步考虑了基于状态观测器的一致性问题。
本文的主要工作分为以下三个部分。
·研究了具有离散时间二阶积分器动态的多智能体系统基于状态观测器的一致性问题。
分别设计了一个用于估计多智能体系统的所有状态的分布式全维状态观测器和分布式控制律。
最后,我们给出了具有离散时间二阶积分器动态的多智能体系统在在固定/随机拓扑下达到一致性的充分必要条件。
·研究了二阶领导者一跟踪者多智能体系统在切换拓扑和速度未知的情况下基于观测器的一致性问题。
首先,假设领导结点的加速度是变化的且能被所有的跟踪结点获得,本章通过设计分布式观测器,对领导和跟踪结点的速度误差进行估计,然后构造了一个公共Lyapunov"i'甬数分析了闭环系统的稳定性,给出了一致性问题可解的充分条件。
其次,把这一思想进一步推广到更一般的情形:领导结点的加速度是常量且不能被任何跟踪结点获得和领导结点的加速度信息时变化的且能被部分跟踪结点获得。
在这样的情形下,分别给出了较弱条件下一致性问题可解的充分条件。
·研究了在固定拓扑下基于数据采样的二阶领导者一跟踪者多智能体系统的一致性问题。
设计了一个基于数据采样的分布式线性一致性协议,其中每个跟踪..结点只能在采样时刻获得与之相邻结点的位置和速度信息。
我们给出了几个系统能达到一致的关于采样周期、控制增益、通信拓扑的充分条件。
在无向/有向拓扑条件下,分别定量地给出了一致性误差的上限,且跟踪的误差上限和采样周期成比例。
关键词:多智能体系统分布式控制观测器一致性采样控制AbstractBecauseofthewideapplicationsinthefieldofmilitaryandcivilian.the击s-tributedcontrolofmulti—agentsystemshasbeenanactiveresearchfield.Consensusisoneoffundamentalissuesinthestudyofthedistributedcontrolofmulti-agentsystemsandisthebasetodevelopothercoordinatedcontrolproblems.Thisdisser-tationmainlystudiesconsensusproblemsofsecond-ordermulti-agentsystems.Forthecasethatsomeinformationisunmeasured,wefurtherconsidertheobserver-basedconsensUSproblems.ThemainresultsandcontributionofthisdissertationareasfoUows.·Theobserver-basedconsensusproblemofsecond-orderdiscrete-timemulti-agentsystemsisstudied.Adistributedfullstateobserverandadistributedcontrollaw,respectively,aredesigned,wheredistributedfullstateobserverisusedtoesti-mateallstatesofmulti-agentsystems.Finally,thesufficientandnecessarycondi-tionsforconsensusofsecond·orderdiscrete-timemulti-agentsystemsaregivenbyusingthematrixanalysismethodforthecasesoffixedandrandomtopology.·Theobserver-basedcoIisensusproblemofsecond—orderleader-followermulti-agentsystemswithswitchingtopologywherenoneofvelocitiesofleaderandfollow-ersCanbeavailableisstudied.Firstly,undertheassumptionthattheaccelerationoftheleaderisactiveandknowntoallfollowers,thisworkestimatesthedynamicdifferencesofthevelocitiesbetweentheleaderandthefollowersbydesigningd诲tributedobservers.AcommonLyapunovfunctionisusedtoanalyzetheclosed-loopandsufficientconditionsofconsensusareestablished.Secondly,theideastabilityisfurtherextendedtotwocaseswheretheaccelerationoftheleaderisconstantbutunknowntoallfollowersandisactiveandknownonlytosomefollowers.Inthiscase,sufficientconditionsofconsensusarepresentedundertherelaxedconditions.·Thesampled-dataconsensusproblemisaddressedforsecond-orderleader-systemsunderfixedundirected/directedinteraction.Adis-followingmulti-agenttributedlinearconsensusprotocolisdesignedbasedonsampleddatawhereeachandvelocitiesonlyatsamplingtimes.Sev-follower-agentcanobtainthepositionseralsufficientconditionsOilthesampfingperiod,thecontrolgain,andthecoin-municationgrapharegiventoachieveconsensus.Thequantitativeboundoftheconsensuserrorsisalsogivenunder,respectively,anundirectedinteractiontopoi-ogyandadirectedinteractiontopology.Itisshownthattheultimateboundofthetrackingerrorsisproportionaltothesamplingperiod.Keywords:Multi-agentSystemsDistributedControlObserverCon-sensusSampled-dataControl第一章绪论弟一早硒比第一章绪论本章主要介绍多智能体系统的工程背景、发展概况、研究现状以及本文的主要研究工作。
多智能体系统一致性综述
将 会趋 于 并保持 一致 。 通 过 埘 Vicsek模 型 进 行 理 论 分 析 ,并 将 用 线 性 模
型 替 代 其 中 的 非 线 性 模 型 。 2003年 ,Jadbabaie” 提 出
时 间 的 推 移 ,智能 体 之 间通 过 局部 的耦 合 作 用 ,最 终 使 得 所 有 的 智 能体 状 态 (如 位 、速度 、加 速 度 等 ) 趋 于一 敛 。其控 制 目标 可捕 述为 :
近年 来 ,多 智能体 的 协调 控制 成为 控 制领 域新 的热 点 。多智 能体 的 协调 控 制的 基本 问题 包 括 一致性 控 制 、 会 合控 制 、聚 结 控制 和 编 队控 制 J。 其中 后 三者 可 视为 一 致 性 控 制 的推 广 与 特例 。 多 智能 体 系统 达 到 一 致 是 实 现 协 调 控 制 的 首 要 条 件 ,受 到 学 者 的 广 泛 关 注 。本 文 将 针 对 一 致 性 的 概 念 、 内容 及 其 国 内 外 的 研 究 现 状 进 行概 述 。
摘要 :本文首先简要介绍 了多智能体相关 的基本概念 。对多智能体 中最 重要 的一 致性问题进行介绍 ,简述多智能体一 致性研究的历史 ,并 列举 了一些 常用的一致性算 法。随后 ,从智能体 自身特性和 网络拓 扑结 构的 特性 两个 角度 出发 ,对现 阶段 多智能 体一致 性研 究的主 要 内容进行 概 述 ,为多智能体一致性研 究铺开方 向。最后 ,对多智能体一致 性的未来 研究提供思路 。 关键词 :多智能体 i一致 性 ;算法 ;通信
74 Technology 技术纵横
文献标识码:B 文章编号:1003-0492(2018)02-0074-05 中图分类号 :TP273
多智能体系统一致性问题概述.
图的Laplacian矩阵:
L DA
图论基础
1 2
4
0 1 A 1 1 1 0 0 0 0 1 0 1 0 0 0 0
1 0 D 0 0 0 2 0 0 0 0 1 0
3
0 0 0 2
1 1 0 1 2 1 L 1 0 1 1 0 1
1 有向拓扑 无向拓扑
3 2 6 1
5 2
3
5
3
5
6
1
2 6
1
0
1
切换拓扑
2
n
一致性问题的设计
•
信息拓扑结构(可设计)
•
控制协议
线性、非线性 同步、异步
控制协议设计
通用一致性协议: ui Kxi Wij ( x j xi )
jNi
ui K1 xi K2 wij ( x j xi )
jNi
(4)
判据: 固定无向连通拓扑结构情况下,
1 n xi (t ) xi (0) n i 1
xi Axi Bui
高阶系统模型:
0 1 0 A ,B 0 0 1
A Rnn , B Rnm
高阶
一致性问题的建模
•
智能体动态模型
•
信息拓扑结构
有向、无向 固定、时变
图论基础
智能体 顶点
通信
边
多智能体网络
有向图
图论基础
有向加权图或有向图:
t
无向连通图或强连通平衡图时,实现平均一致性:
1 n lim xi (t ) xi (0) t n i 1
一阶一致性
(2)离散时间系统
多智能体系统的协调控制研究综述
文章编号 : 1 6 7 4 — 7 0 7 0 ( 2 0 1 3 ) 0 5 - 0 3 8 5 — 1 2
新 出现 的系 统 , 例 如 交 通 车 辆 系统 、 机 器 人 编 队系 统 、 无 人 飞机 或 者 水 下 航行 器 系统 等 复 杂 智 能 系 统 提供 理论 指 导 . 生 物 学 家最 初 使 用
模 拟 仿真 实验 的方 法 , 不 能 在 理 论 上 真 正 揭 示 这 些 生 物 界 自组 织 现
多 智 能 体 系 统 的协 调 控制 研 究 综 述
苗 国英 马 倩 。
摘 要
O 引 言
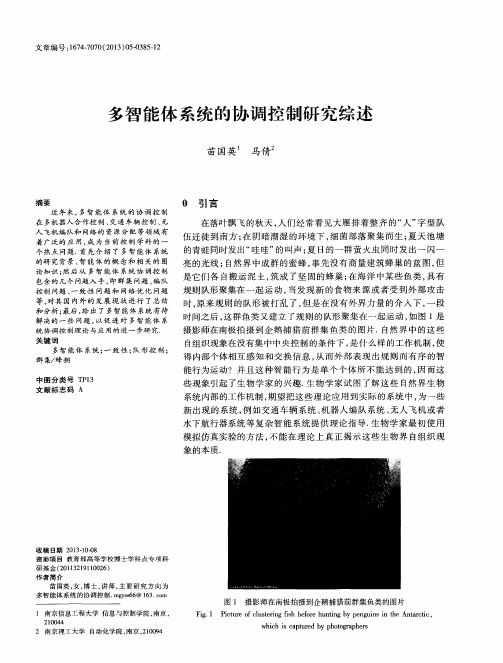
在 落 叶飘 飞 的秋 天 , 人 们 经 常 看 见 大雁 排 着 整 齐 的 “ 人” 字 型 队 伍 迁 徙 到南 方 ; 在 阴暗潮 湿 的环 境 下 , 细 菌 部 落 聚集 而 生 ; 夏 天 池 塘
图1 摄影师在南极拍摄 到企鹅捕猎前群集鱼类 的图片
1 南京信息工程大学 信息与控制学院 , 南京 ,
21 O 0 4 4
F i g . 1 P i c t u r e o f c l u s t e r i n g i f s h b e f o r e h u n t i n g b y p e n g u i n s i n t h e An t a r c t i c , w h i c h i s c a p t u r e d b y p h o t o g r a p h e r s
多智能体系统的最优一致性问题研究

多智能体系统的最优一致性问题研究多智能体系统的最优一致性问题研究摘要:多智能体系统是由多个独立智能体组成的网络化系统,在现实世界中具有广泛应用。
然而,多智能体系统往往面临着保持一致性的挑战。
本文将研究多智能体系统中的最优一致性问题,探讨一些解决方案和应用案例。
1.引言多智能体系统是由多个自治、相互交互的智能体组成,每个智能体都能够独立地感知环境、做出决策并执行动作。
多智能体系统广泛应用于社交网络、智能交通、机器人控制等领域。
然而,由于个体间的异质性和个体目标之间的冲突,多智能体系统往往面临着保持一致性的挑战。
2.问题描述最优一致性问题是指在多智能体系统中,通过各个智能体之间的交互和协作,实现系统整体性能最优化的问题。
在这个问题中,每个智能体都追求自身的利益最大化,但同时也需要考虑整个系统的整体性能。
如何在个体利益和整体性能之间找到平衡点,是最优一致性问题的核心。
3.解决方案为了解决最优一致性问题,研究者提出了许多方法和算法。
以下是一些常见的解决方案:3.1.博弈论博弈论是一种研究冲突和合作关系的数学工具,可以用于多智能体系统中最优一致性问题的研究。
通过构建合适的博弈模型,可以分析各个智能体之间的冲突和合作关系,并找到系统整体性能最优的策略。
3.2.分布式优化分布式优化是一种将优化问题分解为各个子问题,并通过分布式算法协同解决的方法。
在多智能体系统中,可以将系统整体优化问题分解为各个智能体的局部优化问题,并通过分布式算法求解。
这样,每个智能体可以根据自身的局部信息做出决策,从而实现系统整体性能最优化。
3.3.强化学习强化学习是一种通过试错和反馈来优化智能体决策策略的方法。
在多智能体系统中,可以将多个智能体视为强化学习的个体,并通过相互之间的交互和反馈来优化决策策略。
通过不断学习和调整,最终实现系统整体性能最优化。
4.应用案例最优一致性问题在实际应用中具有重要的意义。
以下是一些应用案例的简要介绍:4.1.智能交通系统智能交通系统是一个由多个交通智能体组成的系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多智能体系统一致性综述引言多智能体系统在20世纪80年代后期成为分布式人工智能研究中的主要研究对象。
研究多智能体系统的主要目的就是期望功能相对简单的智能体系统之间进行分布式合作协调控制,最终完成复杂任务。
多智能体系统由于其强健、可靠、高效、可扩展等特性,在科学计算、计算机网络、机器人、制造业、电力系统、交通控制、社会仿真、虚拟现实、计算机游戏、军事等方面广泛应用。
多智能体的分布式协调合作能力是多智能体系统的基础,是发挥多智能体系统优势的关键,也是整个系统智能性的体现。
在多智能体分布式协调合作控制问题中,一致性问题作为智能体之间合作协调控制的基础,具有重要的现实意义和理论价值。
所谓一致性是指随着时间的演化,一个多智能体系统中所有智能体的某一个状态趋于一致。
一致性协议是智能体之间相互作用、传递信息的规则,它描述了每个智能体和其相邻的智能体的信息交互过程。
当一组智能体要合作共同去完成一项任务,合作控制策略的有效性表现在多智能体必须能够应对各种不可预知的形式和突然变化的环境,必须对任务达成一致意见,这就要求智能体系统随着环境的变化能够达到一致。
因此,智能体之间协调合作控制的一个首要条件是多智能体达到一致。
近年来,一致性问题的研究发展迅速,包括生物科学、物理科学、系统与控制科学、计算机科学等各个领域都对一致性问题从不同层面进行了深入分析,研究进展主要集中在群体集、蜂涌、聚集、传感器网络估计等问题。
目前,许多学科的研究人员都开展了多智能体系统的一致性问题的研究,比如多智能体分布式一致性协议、多智能体协作、蜂涌问题、聚集问题等等。
下面,主要对现有文献中多智能体一致性协议进行了总结,并对相关应用进行简单的介绍。
1.1 图论基础多智能体系统是指由多个具有独立自主能力的智能体通过一定的信息传递方式相互作用形成的系统;如果把系统中的每一个智能体看成是一个节点,任意两个节点传递的智能体之间用有向边来连接的话,智能体的拓扑结构就可以用相应的有向图来表示。
用G (V,E,A)来表示一个有向加权图,其中V { v1,v2 , ,v n} 代表图的n个顶点; E V V 是边集合,如果存在从第 i 个顶点到第 j 个顶点的信息流,则有e ij (v i,v j) E; A是非负加权邻接矩阵e ij E a ij 0;节点v i的邻居集定义为N i {v j|(v i,v j) E} 。
如果对所有的e ij E意识着e ji E,则称 G是无向图。
2 个不同的节点v i和v j之间有有向路径是指存在1 个有序节点序列(v1 ,v k ),(v k ,v k ),,(v k,v j);如果图G 中任意两个不同的结点间都存在1条有向路径,则称 G 是强连通图;如果 G 是无向的,则称 G 是连通图。
图 G 有有向生成树指的是图 G存在1个包含所有定点的子图,除了唯一的根节点以外,其余节点有且仅有1 个父节点。
二.主要研究内容2.1 多智能体系统一致性问题描述令x i R q表示图中第 i 个顶点v i 的状态且满足x f(x i ,u i ) ,这样可利用二元组(G,x)来表示动态多智能体网络系统,其中x (x1T,x2T, ,x n T)T,系统状态方程为 xF(x,u) 。
如果对于所有的 i, j ,都有 lim x i(t) x j (t) 0,则称多智能体系统实现一致性。
2.2 一致性协议2.2.1一阶一致性在早期关于一致性问题的研究中,绝大多数研究工作针对智能体为一阶智能体的情形,分析不同网络拓扑结构下实现一致性需要满足的条件和一致性实现时的收敛值。
( 1)连续时间情形当网络中的智能体均具有形如:x i u i ( x i R) (1)的状态方程时,经常采用一致性协议为: u i a ij (x j x i ) (2) iN因此,在上述一致性协议下的闭环系统为 x Lx ,系统(1)的解为x(t) e Lt x(0),可以利用线性系统理论来分析系统的一致性问题。
在固定拓扑结构下,一致性的相关结论为:定理1 假定 G 有一个有向生成树, L 为其拉普拉斯矩阵且有 L 1 0 ,T L 0 ,T1 1 ,则在协议( 2)作用下,多智能体系统可实现一致性,且 limx i(t) γT x(0) 。
特别地,当 G为无向连通图或强连通平衡图时,多智能体系统n可实现平均一致性,即 limx i (t) x i (0)。
t i 1 许多场合下,由于节点间连接的建立或失败,多智能体系统的拓扑结构往往 是动态发生变化的。
拥有动态网络的系统一般称之为切换网络, 切换网络可以用 G 0 (t )来表示,其中 (t):R J {1,2, ,m} 为切换信号, {G 1,G 2, ,G m }为所有可 能的拓扑结构组成的集合。
在协议( 2)的作用下,且有切换拓扑结构的闭环系 统为:x L(G k )x(3) 如果上述系统仅在离散时刻 1, 2, , n (0 1 2 n t) 处切换,则系统(3)的 解为:x(t) e L(G 0(h))(t τh ))e L( G 0( h 1) )( τh - h-1) e L( G 0(2) )( τ2 - 1)e L(G 0(1))1 x(0) x(t) e e e e x(0) 系统一致性分析转化为多个具有非负对角的随机矩阵乘积的极限问题的分析。
在切换拓扑结构下,一致性的相关结论为:定理 2 假定切换网络在任意长度有上界的时间间隔内均有一个有向生成树,则 在协议( 2)作用下,切换多智能体系统可渐进实现一致性。
( 2)离散时间情形 当网络中的智能体均具有形如:x i (k 1) x i (k) u i (k) (4)的状态方程时,采用一致性协议: u i a ij (x j (k) - x i ( k))(5) j N i因此,在上述一致性协议下形成的闭环系统为:x(k 1) Px(k)(6) 式中, P I εL0, 1 , 是网络节点的最大出度。
在固定拓扑和切换拓扑结构下, 多智能体系统有类似定理 1 和定理 2 相应的 结论。
( 3)其他研究热点 除了上述关于一致性的经典结论外,还有学者分别考虑带时滞的一致性、有一个动态领导者、多个静态或者动态领导者的一致性问题。
2.2.2二阶一致性多智能体系统二阶一致性的研究中假设智能体具有下列形式的状态方程:采用一致性协议:u i kv ia ij (x j x i ) (8)j N i x i v ix i u i i 1,2, ,n7)则闭环系统的矩阵形式为:I n (A BK)-L BF以 Jordan 标准型理论为基础分析闭环线性系统的一致性,相应结论为: 定理 3 当系统具有固定无向连通拓扑结构时, 协议( 8)可实现平均一致性,1n 即当 t时,x i (t) 1 x i (0),v i (t) 0 。
当网络结构在无向连通图之间切换时, n i1 协议( 8)可解决平均一致性。
在上述结论的基础上, 有学者进一步拓展了上述一致性算法, 考虑了有界控 制输入,无相对速度测量时的各种二阶一致性问题。
2.2.3 高阶一致性近来,许多研究人员对多智能体系统一致性问题的研究转移到了智能体为 n 阶智能体的情况, 并以线性矩阵不等式给出系统一致性需要满足的条件, 在一定 假设分析给出线性矩阵不等式的可解性,并通过实例验证了算法的有效性。
考虑智能体具有状态方程:x i Ax i Bu i或:x i Ax i Bu i y i Cx i对方程( 9)用状态反馈: u i K i b x i K i bx j j Ni 对方程( 10)静态输出反馈: u i K i b y i K i by j j Ni或动态输出反馈:x A D x B D y u C D x D D Lcy其中, L c L I n2.3 一致性的应用 2.3.1 一致性在协作控制中的应用 一致性是多智能体实现协同合作、完成共同制定任务的基础。
目前,有许多 学者开展了关于一致性应用问题的研究, 如聚集问题、蜂涌问题、 编队控制问题 等。
聚集问题要求对每一个智能体同时达到指定的位置,文献 [9] 采用一致性搜 索思想讨论了同步情形和异步情形下的聚集问题;文献 [10] 分别就固定拓扑结构 和切换拓扑结构下, 分别讨论了一类速度恒定, 通过局部反馈校正方向的智能体 系统的峰拥问题。
10 00 A 中其,x 9) 10)2.3.2 同步问题同步问题主要是在假定信息交换拓扑结构在完全图的情况下,通过智能体之间的信息交换,修正智能体的动力学,最终实现同步性。
笔者所研究的随机连接的多智能体系统,和以往确定性的框架不同的是多智能体系统中的多智能体是具有马尔科夫性质,行为是随机的。
每个多智能体的状态随时间变化建模成一个有限维的连续马尔科夫链。
在这种情形下,一致性是当所有多智能体的概率向量达到一个共同的稳定的概率向量,因此在完全随机的背景下,讨论概率一致性才是有意义的。
三.结束语三.结束语对现有文献中的一致性协议进行了比较详细的总结和分析,由于多智能体一致性相关研究问题的多样性,本文仅对具有代表性的一部分智能体相关的一致性协议进行了综述。
此外,关于多智能体系统一致性问题,还有许多的研究方向和研究热点如随机一致性,非线性一致性协议等。
关于多智能体一致性问题,还有许多的问题亟待研究和解决。
四.参考文献[1] Cvetkovic D, Rowlinson P, Simic S, et al. Algebraic Graph Theory[M]// Algebraic graph theory. Cambridge University Press, 1974:xvi+298[2] Ren W, Beard R W, Atkins E M. A survey of consensus problems in multi-agent coordination[C]// American Control Conference, 2005. Proceedings of the. IEEE, 2005:1859-1864 vol. 3[3] Olfati-Saber R, Fax J A, Murray R M. Consensus and Cooperation in Networked Multi-Agent Systems[J]. Proceedings of the IEEE, 2007, 95(1):215-233[4] Xiao F, Wang L. Consensus protocols for discrete-time multi-agent systems with time-varying delays[J]. Automatica, 2008, 44(10): 2577-2582[5] Ren W, Atkins E. Second-order consensusp rotocols in multiple vehicle systems with local interactions[C]//AIAA Guidance, Navigation, and ControlConference and Exhibit. 2005: 6238[6] Ren W. Consensus based formation control strategies for multi-vehicle syst- ems[C]//American Control Conference, 2006. IEEE, 2006: 6 pp[7] Zhai G, Okuno S, Imae J, et al. Consensus algorithms for multi-agent systems: A matrix inequality based approach[C]//Networking, Sensing and Control, 2009. ICNSC'09. International Conference on. IEEE, 2009: 891-896 [8] Zhai G, Okuno S, Imae J, et al. A new consensus algorithm for multi-agent systems via dynamic output feedback control[C]//Control Applications,(CCA) & Intelligent Control,(ISIC), 2009 IEEE. IEEE, 2009: 890-895[9] Lin J, Morse A S, Anderson B D O. The multi-agent rendezvous problem. Part 2: The asynchronous case[J]. SIAM Journal on Control and Optimization, 2007, 46(6): 2120-2147[10] RenW, Beard RW. Distributed consensus in multi-vehicle cooperative con-tr ol[M]. Springer-Verlag, London, 2008[11] 肖峰. 多智能体网络系统的一致性[D]. 北京大学, 2008。