迈信驱动器参数表
迈信驱动华大电机选型手册

LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列LBB 、HBB 系列LB 、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。
迈信驱动器参数表

Maxsine驱动器参数表PA-0 密码PA-1 型号代码PA-2 软件版本PA-3 初始显示状态PA-4 控制方式选择0-位置控制1-速度控制2-试运行控制3-JOG控制方式4-编码器调零方式5-开环运行方式(用于测试电机及编码器)6-转矩控制方式PA-5 速度比例增益#值越大增益越高,刚性越大,不震荡值越大越好PA-6 速度积分时间常数#值越小积分速度越快,太小容易超调,太大时响应变慢PA-7 转矩滤波器PA-8 速度检测滤波器PA-9 位置比例增益PA-10 位置前馈增益PA-11 位置前馈滤波器截止频率PA-12 位置指令脉冲分频分子PA-13 位置指令脉冲分频分母PA-14 位置指令脉冲输入方式PA-15 位置指令脉冲方向取反PA-16 定位完成范围PA-17 位置超差检测范围PA-18 位置超差错误无效PA-19 位置指令平滑滤波器PA-20 驱动禁止输入无效PA-21 JOG运行速度PA-22 内外速度指令选择PA-23 最高速度限制PA-24 内部速度1PA-25 内部速度2PA-26 内部速度3PA-27 内部速度4PA-28 到达速度PA-29 模拟量转矩指令输入增益PA-30 用户转矩过载报警值PA-31 用户转矩过载报警检测时间PA-33 模拟量转矩指令输入方向取反PA-34 内部CCW转矩限制PA-35 内部CW转矩限制PA-36 外部CCW转矩限制PA-37 外部CW转矩限制PA-38 速度试运行,JOG运行转矩限制PA-39 模拟量转矩指令零偏补偿PA-40 加速时间常数PA-41 减速时间常数PA-42 S型加减速时间常数PA-43 模拟速度指令增益PA-44 模拟速度指令方向取反PA-45 模拟速度指令零偏补偿PA-46 模拟速度指令滤波器PA-47 电机停止时机械制动器动作设定PA-48 电机运转时机械制动器动作设定PA-49 电机运转时机械制动器动作速度PA-50 转矩控制时速度限制PA-51 动态电子齿轮有效PA-52 第2位置指令脉冲分频分子PA-53 低4位输入端子强制ON控制字PA-54 高4位输入端子强制ON控制字PA-55 低4位输入端子取反控制字PA-56 高4位输入端子取反控制字PA-57 输出端子取反控制字PA-58 输入端子去抖动时间常数PA-59 演示运行。
迈信伺服驱动说明书

符号 POW
RUN
8 2 4 5
名称 主电源灯
运行灯
增加键 减小键 退出键 确认键
功能 点亮:主电源已上电; 熄灭:主电源未上电。 点亮:电机通电运行中; 熄灭:电机未通电运行。 增加序号或数值;长按具有重复效果。 减小序号或数值;长按具有重复效果。 菜单退出;操作取消。 菜单进入;操作确认。
16
3.1.3 数值显示
4
EP1 交流伺服驱动器简明手册
第 2 章 接线
2.1 系统组成与接线
2.1.1 伺服驱动器接线图
5
EP1 交流伺服驱动器简明手册
2.1.2 接线说明
接线注意事项: 接线材料依照电线规格使用。 电缆长度,指令电缆3m以内,编码器电缆20m以内。 检查L1、L2、L3和L1C、L2C的电源和接线是否正确,请勿接到380V电源上。 电机输出 U、V、W 端子相序,必须和电机相应端子一一对应,接错电机可能不转或飞
信号名称
针脚号
信号线颜色
功能
标准式 省线式
(16芯) (10芯)
[注1]
[注2]
编码器电源
5V 13 红+红白 红+红白 编码器用5V电源(由驱动器
提供),电缆在20m以上时,
0V
14
黑+黑白 黑+黑白 为了防止编码器电压降低,
电源和地线可采用多线连
接或使用粗电线。
编码器A相输入 A+
5
棕
棕
与编码器A相输出连接。
EP1 交流伺服驱动器简明手册
12345 -1234 1.2.3.4.5.
12345,正数。
-1234,4位以内的负数, 前面显示减号表示负数。
伺服驱动器参数设置步骤

Torque/force limit value positive:400%
Torque/force limit value negative:-400%
Torque/forc/force limit value :400%
MAD160-C-0150-SA-S2-K-G-0-35-N1发动机型号
Temperature sensor:KTY84
2500Rpm需要设置
Acceleration factor: 1 需要设置
Ramp 2pitch:150rad/s与Deceleration ramp2:150rad/s需要设置
注:此软件为翻页就会保存修改数据,未提到的参数为默认制值
THANKS !!!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
欢迎您的下载,资料仅供参考
伺服驱动器参数
打开DriveTop软件之后出现下图画面选择“Online RS232 IndraDrive”
串口以及波特率选择如下图
参数设定首先进入“Operating mode selecting”菜单“Primary operation mode”一栏选择“velocity control”最后点击Next就可以进入以下参数设置画面
需设置
Drive Halt acceleration bipolar:800rad/s
Standstill window:5Rpm
Resolution of encoder emulat :2048 Counts/Rev
Maker pulse offset:0 Counts Maker pulse distance:2048 Counts
武汉迈信电气技术有限公司产品手册说明书

VR动感座椅行业选型手册EP3E单轴伺服驱动器 · EPX单轴/双轴/三轴伺服驱动器 · M/G交流伺服电机专注伺服控制Since1998公司简介company profile武汉迈信电气技术有限公司于2004年成立于湖北省武汉市东湖高新技术开发区,公司自成立以来,一直致力于在工业自动化等领域为客户提供先进的产品和一流的服务。
全数字式交流伺服驱动器和交流伺服电机是武汉迈信电气技术有限公司的核心产品。
凭借多年的持续努力和技术团队20多年的技术积累和创新,公司现在已成为国内同行业技术和市场领先企业。
目前,武汉迈信电气技术有限公司的交流永磁伺服电机及驱动器已得到越来越多的客户认同和选用,并广泛应用于数控机床、纺织机械、包装机械、印刷机械、切割机、打标机、工业机器人等众多工业自动化领域,产品远销东南亚、印度、南非、俄罗斯、巴西等国家和地区。
产品伺服驱动器EP3E 单轴动感座椅版伺服驱动器:三相/单相 电压AC220V/380V,功率0.1kW~15kW。
EPX 单轴动感座椅版伺服驱动器:三相/单相 电压AC220V,功率0.4kW~2.5kW。
EPX 双轴动感座椅版伺服驱动器:三相/单相 电压AC220V,功率0.4kW~1.5kW。
EPX 三轴动感座椅版伺服驱动器:三相/单相 电压AC220V,功率0.4kW~1.5kW。
伺服电机MS系列:中小惯量,高转速,高加减速,旋转伺服电机,转矩范围为0.32N·m~14.3N·m。
MA系列:中小惯量,中转速,小电流,旋转伺服电机,转矩范围为4.0N·m~48.0N·m。
GS系列:高惯量,高转速,旋转伺服电机,转矩范围为0.64N·m~15.0N·m。
GA系列:高惯量,中转速,旋转伺服电机,转矩范围为4.0N·m~15.0N·m。
MN系列:超小惯量,高动态性能,旋转伺服电机,转矩范围为1.0N·m~334.3N·m。
EX驱动控制器参数表

F139 F140 F141
NS-SW 功能时设定的服务层 3 (33-48 楼) 备用 调整抱闸释放后 KDY 的释放 延时时间
F142-F151
备用
152
F153~F163 备用
65535 65535 65535
0
F164 称量装置类型选择
0
0~65535 0~65535 0~65535
0~65535
F44 串行通讯本机地址
255
F45~F4 备用
F49 自动返基模式
F50 前开门允许 1(1-16 楼)
F51 前开门允许 2(17-32 楼)
F52 前开门允许 3(33-48 楼)
F53 后开门允许 1(1-16 楼)
F54 后开门允许 2(17-32 楼)
F55 后开门允许 3(33-48 楼)
0:下召唤;1:上召唤
0.006m/s
参数 编号 F180
F181
参数含义
出厂设置 限制范围
速度增益
1000
并联中的电梯编号(只有在参
数 F23=3 时才有效)
0
0~65535 0~7
单位 ‰
F182 减速开关级数
1
0~65535
F183 井道自学习速度
800
F184~ 备用 F185
F186 启动时蠕动时间(参见 F175) 50
mm/s mm/s 0.1s 0.1s
2
0~20
0.1s
备注
根据现场实际情况调整 根据现场实际情况调整 根据现场实际情况调整 根据现场实际情况调整 并联或群控时根据情况设置 根据现场实际情况调整
6
2~30
0.1s
leadshine DMA860H 数字式两相步进驱动器使用说明书

深圳市雷赛智能控制股份有限公司地址:深圳市南山区学苑大道1001号南山智园A3栋10-11楼邮编:518000电话:400-885-5521传真:*************Email:********************网址:上海分公司地址:上海市淞江区九亭镇涞寅路1881号10栋电话:************传真:************北京办事处地址:北京市朝阳区北苑路13号院office1号楼A单元606号电话:************传真:************DMA860H数字式两相步进驱动器使用说明书版权所有不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】深圳市雷赛智能控制股份有限公司目录一、产品简介 (2)1.概述 (2)2.特点 (2)3.应用领域 (2)二、电气、机械和环境指标 (2)1.电气指标 (2)2.使用环境及参数 (3)3.机械安装图 (3)4.加强散热方式 (4)三、驱动器接口和接线介绍 (4)1.接口描述 (4)2.控制信号接口电路 (5)3.控制信号时序图 (5)4.控制信号模式设置 (6)5.接线要求 (6)四、电流、细分拨码开关设定和参数自整定 (7)1.电流设定 (7)2.细分设定 (7)3.参数自整定功能 (8)五、供电电源选择 (8)六、电机选配 (8)1.电机选配 (8)1.电机接线 (9)2.输入电压和输出电流的选用 (9)七、典型接线案例 (10)八、保护功能 (11)九、常见问题 (12)1.应用中常见问题和处理方法 (12)2.用户常见问题解答 (13)雷赛产品保修条款 (14)DMA860H数字式两相步进驱动器一、产品简介1.概述DMA860H是雷赛公司新推出的数字式两相步进电机驱动器,采用最新32位DSP技术,用户可以设置400~51200内的细分以及额定电流内的任意电流值,能够满足大多数场合的应用需要。
由于采用内置微细分技术,即使在低细分的条件下,也能够达到高细分的效果,低中高速运行都很平稳,噪音超小。
迈信驱动器参数表
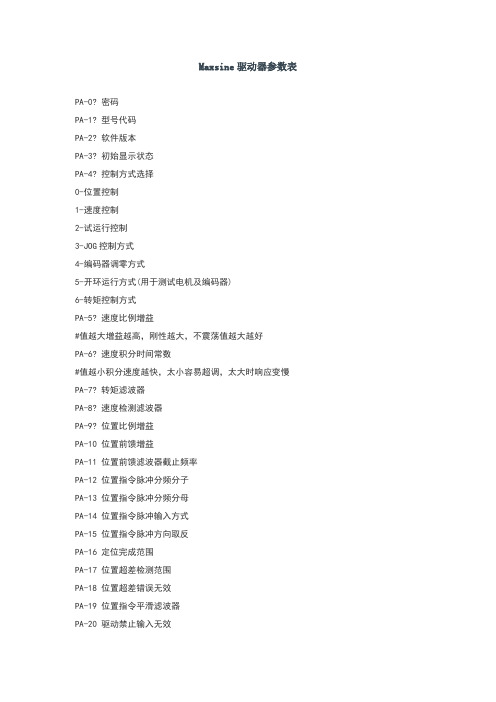
Maxsine驱动器参数表PA-0? 密码PA-1? 型号代码PA-2? 软件版本PA-3? 初始显示状态PA-4? 控制方式选择0-位置控制1-速度控制2-试运行控制3-JOG控制方式4-编码器调零方式5-开环运行方式(用于测试电机及编码器)6-转矩控制方式PA-5? 速度比例增益#值越大增益越高,刚性越大,不震荡值越大越好PA-6? 速度积分时间常数#值越小积分速度越快,太小容易超调,太大时响应变慢PA-7? 转矩滤波器PA-8? 速度检测滤波器PA-9? 位置比例增益PA-10 位置前馈增益PA-11 位置前馈滤波器截止频率PA-12 位置指令脉冲分频分子PA-13 位置指令脉冲分频分母PA-14 位置指令脉冲输入方式PA-15 位置指令脉冲方向取反PA-16 定位完成范围PA-17 位置超差检测范围PA-18 位置超差错误无效PA-19 位置指令平滑滤波器PA-20 驱动禁止输入无效PA-21 JOG运行速度PA-22 内外速度指令选择PA-23 最高速度限制PA-24 内部速度1PA-25 内部速度2PA-26 内部速度3PA-27 内部速度4PA-28 到达速度PA-29 模拟量转矩指令输入增益PA-30 用户转矩过载报警值PA-31 用户转矩过载报警检测时间PA-33 模拟量转矩指令输入方向取反PA-34 内部CCW转矩限制PA-35 内部CW转矩限制PA-36 外部CCW转矩限制PA-37 外部CW转矩限制PA-38 速度试运行,JOG运行转矩限制PA-39 模拟量转矩指令零偏补偿PA-40 加速时间常数PA-41 减速时间常数PA-42 S型加减速时间常数PA-43 模拟速度指令增益PA-44 模拟速度指令方向取反PA-45 模拟速度指令零偏补偿PA-46 模拟速度指令滤波器PA-47 电机停止时机械制动器动作设定PA-48 电机运转时机械制动器动作设定PA-49 电机运转时机械制动器动作速度PA-50 转矩控制时速度限制PA-51 动态电子齿轮有效PA-52 第2位置指令脉冲分频分子PA-53 低4位输入端子强制ON控制字PA-54 高4位输入端子强制ON控制字PA-55 低4位输入端子取反控制字PA-56 高4位输入端子取反控制字PA-57 输出端子取反控制字PA-58 输入端子去抖动时间常数PA-59 演示运行。
伺服驱动常用参数

伺服驱动常用参数伺服驱动是现代工业中常用的控制设备,用于驱动伺服电机进行精确的位置和速度控制。
在伺服驱动的调试和应用过程中,我们需要了解和设置一些常用的参数,以确保系统的稳定性和性能。
下面将介绍一些常用的伺服驱动参数。
1. 基本参数基本参数是伺服驱动的基础设置,包括电机型号、电机额定电流、电机额定转速等。
这些参数需要根据实际的电机和应用要求进行设置,以确保驱动能够正确地控制电机的运动。
2. 加速度和减速度加速度和减速度是指电机在启动和停止过程中的速度变化率。
设置合适的加速度和减速度可以确保电机平稳地启动和停止,避免产生过大的冲击力和振动。
加速度和减速度的设置应根据具体的应用需求和机械结构来确定。
3. 比例增益和积分时间比例增益和积分时间是PID控制器中的两个重要参数。
比例增益决定了系统对误差的响应程度,增大比例增益可以提高系统的响应速度,但也容易引起震荡。
积分时间决定了系统对误差的积累程度,增大积分时间可以提高系统的稳定性,但也容易引起超调。
设置合适的比例增益和积分时间可以使系统达到良好的控制效果。
4. 位置和速度滤波位置和速度滤波用于滤除电机运动中的噪声和干扰,提高系统的控制精度。
位置滤波可以平滑电机位置的变化,减少抖动和误差;速度滤波可以平滑电机速度的变化,减少速度波动和震荡。
滤波的程度应根据实际情况进行调整,以平衡控制精度和响应速度。
5. 电流限制和保护电流限制和保护是保证电机和驱动器安全运行的重要参数。
设置合适的电流限制可以避免电机过载和驱动器过热;设置合适的电流保护可以在电机出现故障时及时停止驱动,避免进一步损坏。
电流限制和保护的设置应根据电机的额定电流和驱动器的额定电流来确定。
6. 位置偏差和误差补偿位置偏差和误差补偿用于修正电机在位置控制中的误差。
位置偏差是指电机实际位置与目标位置之间的差异,误差补偿可以根据位置偏差来调整控制器的输出,使实际位置逼近目标位置。
位置偏差和误差补偿的设置应根据实际的控制要求和电机性能来确定。
迈信电气 EP1C Pro 伺服系统 选型指南说明书

资料编号2021.06.0701020304远程升级EP1C Pro全系列产品支持远程固件升级,方便后期维护。
接线简化·380V系列驱动器省去外部24V控制电源接线;·可选内置/外置制动电阻接口;·可选直流电抗器接口。
性能提升·支持四段共振陷波器;·支持低频振动抑制及中频振动抑制;·支持摩擦补偿、速度观测器及高阶控制等功能。
接口丰富·兼容5V差分及24V单端脉冲指令输入;·支持11个可编程DI及5个可编程DO;·支持差分及单端ABZ反馈输出。
新一代EP1C Pro系列伺服驱动器,延续了EP1C系列的外观风格,采用全新的ARM构架CORTEX M4硬件平台及更加优化的软件控制算法。
新增加速度观测器、模型追踪及摩擦补偿等功能,搭配兼容性更强的信号指令接口,可满足客户更多应用需求。
EP1C Pro高速高精伺服驱动器0.1kW~15.0kW数控系统运动控制器运动控制卡PLCEP1C Pro伺服电机脉冲控制ModbusCANopen05062kHz响应带宽/定位时间短至1ms速度响应频宽为2kHz。
基于位置前馈的高响应控制,能降低响应延迟,功能后,抑制装置振动装置末端有两种振动成分,EP1C Pro系列伺服驱动器可同时抑制装置末端的两种振动,可以带来更高的机械响应。
符号电压L 220V H380V3符号额定转矩符号额定转矩TL010.1kW TL020.2kW TL050.5kW TH060.6kW TH10 1.0kW TH15 1.5kW TH20 2.0kW TH30 3.0kW TH50 5.0kW TH757.5kW TH909.0kW TH11011.0kW TH15015.0kWTL080.8kW TL10 1.0kW TL15 1.5kW TL25 2.5kW TL35 3.5kW TL555.5kW4系列名伺服驱动器1系列名伺服驱动器2符号制动器E3串行式编码器5符号制动器S2DB44控制端口6符号规格M 支持Modbus C支持CANopen707警示标签符号机座号04040mm 06060mm 08080mm 110110mm 130130mm 180180mm1符号系列MS MS系列伺服电机MA MA系列伺服电机GS GS系列伺服电机GA GA系列伺服电机BS BS系列伺服电机BABA系列伺服电机2符号电压L 220V H380V3符号额定转速151500rpm 202000rpm 252500rpm 303000rpm5符号编码器脉冲数分辨率导线数F 标准增量式2500ppr 10,00015旋转变压器R 12bit 4,0967C 多圈绝对值17bit 131,07277M 多圏绝对值23bit 8,388,608D 5单圈绝对值17bit 131,0727P多圏绝对值25bit33,554,432B 5单圈绝对值23bit 8,388,6086符号制动器N 不配置Z配置失电制动器7符号规格O 圆轴(无键)A 闭口键C开口键8符号规格1默认值2客户自定义9注:40、60、80全系列电机标配“A”,M/G系列110、130、180电机标配“H”,B系列110、130、180电机标配“J”,订货时标配符号省略。
AC伺服主轴+MDS-C1系列-主轴参数一览表

说明
《对于 MDS-C1-SP/SPH》
F E D C B A 9 8 7 6 54 3 2 1 0
poff hzs
ront
pycal pychg pyst pyoff
sftk dflt 1a2m
bit
设定为 0 时的意义
1a2 1 放大器 2 电机功能:无效 0m
1 dflt 默认电机:主
2 sftk 无 SF-TK 卡
设定为 1 时的意义
标准
0
0
0
0
0
0
0
0
0
最小励磁率的高速区域降低方式有
效
0
0
0
READY ON 高速
0
MDS-B-PJEX 连接有效
1
通过高周期零速度实现门关闭有效 0 NC 电源关闭时接触器保持有效 0
在简称上加有“*” 符号(如 osp* 等)的参数、是在 NC 电源重启后才有效的参数。
3-59
1~32767
设定相对于齿轮 001 的主轴侧齿数。
1~32767
设定相对于齿轮 010 的主轴侧齿数。
1~32767
设定相对于齿轮 011 的主轴侧齿数。
1~32767
设定相对于齿轮 000 的电机轴侧齿数。
1~32767
设定相对于齿轮 001 的电机轴侧齿数。
1~32767
设定相对于齿轮 010 的电机轴侧齿数。
速度控制时· SP022 VGNP1* 速度环比例增益
速度控制时· SP023 VGMI1* 速度环积分增益 SP024 SP025 GRA1* 主轴侧齿轮齿数 1 SP026 GRA2* 主轴侧齿轮齿数 2 SP027 GRA3* 主轴侧齿轮齿数 3 SP028 GRA4* 主轴侧齿轮齿数 4 SP029 GRB1* 电机轴端齿轮齿数 1 SP030 GRB2* 电机轴侧齿轮齿数 2 SP031 GRB3* 电机轴侧齿轮齿数 3 SP032 GRB4* 电机轴侧齿轮齿数 4
迈信电气刀架伺服使用说明书
伺服驱动器参数

伺服驱动器参数一、概述伺服驱动器是伺服系统的核心部件之一,其参数设置对于伺服系统的性能和稳定性具有至关重要的影响。
本文将从伺服驱动器参数的基本概念、常见参数及其设置方法、参数调试方法等方面进行详细介绍。
二、基本概念1. 伺服驱动器伺服驱动器是一种控制电机转速和位置的设备,它通常由一个控制电路和一个功率放大器组成。
控制电路接收来自编码器或位置传感器的反馈信号,并将其与设定值进行比较,然后输出控制信号给功率放大器,通过功率放大器将电机转速和位置控制在设定值范围内。
2. 闭环控制闭环控制是指在系统中增加一个反馈环节,通过对输出信号进行采样并与输入信号进行比较来实现对系统输出量的精确控制。
在伺服驱动器中,闭环控制可以通过编码器或位置传感器反馈来实现。
3. PID调节PID调节是一种经典的闭环控制算法,它通过对误差、误差变化率和误差积分值进行加权求和来计算控制信号。
在伺服驱动器中,PID调节可以用于控制电机的转速和位置。
三、常见参数及其设置方法1. 基本参数(1)电源电压:伺服驱动器的工作电源电压范围通常为AC 220V或380V,需要根据实际情况进行设置。
(2)额定输出功率:伺服驱动器的额定输出功率取决于所控制的电机类型和规格,需要根据实际情况进行设置。
(3)最大输出频率:伺服驱动器的最大输出频率取决于所控制的电机类型和规格,需要根据实际情况进行设置。
2. PID参数(1)比例系数Kp:Kp越大,系统响应越快,但也会导致系统震荡;Kp越小,系统响应越慢,但也会导致系统稳定性差。
一般来说,Kp的值应该在0.5~2之间。
(2)积分时间Ti:Ti越大,系统对误差积分的效果越强,但也会导致系统响应变慢;Ti越小,系统对误差积分的效果越弱,但也会导致系统稳定性差。
一般来说,Ti的值应该在0.1~10之间。
(3)微分时间Td:Td越大,系统对误差变化率的响应越快,但也会导致系统抖动;Td越小,系统对误差变化率的响应越慢,但也会导致系统稳定性差。
新代控制器伺服连接与设定手册V2.4

SYNTEC伺服连接与设定手册by :苏州新代技术中心date : 2011/11/25ver :2.4版本更新记录*如有修改请恕不另行通知目录一、台达系列连线及参数设置 (4)1 台达A系列: (4)2 台达B系列: (6)3 台达AB系列: (8)4 台达A2系列: (10)5 台达B2系列: (12)二、安川连线及参数设置 (13)1 安川二型系列: (14)2 安川五型系列: (16)三、三菱系列伺服接线与参数设定 (19)1 三菱J2S-A: (19)2 三菱J3-A: (22)3三菱MR-E: (25)四、松下系列连线及参数设置 (30)1 松下A: (30)2 松下A4: (32)3 松下A5: (34)五、华中伺服连线及参数设置 (36)1 华中HSV-160: (36)2 华中HSV-18D: (38)六、ESTUN伺服连线及参数设置 (40)1 ESTUN-PRONET: (40)2ESTUN-EDB: (42)七、SANYO伺服连线及参数设置 (44)1 SANYO-R: (44)2 SANYO-PY2: (46)八、杭州英迈克伺服连线及参数设置 (50)1 杭州英迈克: (50)九、东元伺服连线及参数设置 (52)1 东元伺服(TSDA): (52)2 东元伺服(TSDE): (55)十、迈信连线及参数设置 (57)1 迈信EP1: (57)2 迈信EP2: (59)3 迈信EP100: (62)一、台达系列连线及参数设置1 台达A系列:参数仅供参考2台达B系列:参数仅供参考3台达AB系列:参数仅供参考4台达A2系列:参数仅供参考5台达B2系列:参数仅供参考二、安川连线及参数设置1安川二型系列:参数仅供参考2 安川五型系列:参数仅供参考三、三菱系列伺服接线与参数设定1 三菱J2S-A:参数仅供参考2三菱J3-A:以下为供参考的建议参数值,基本参数一般不变,增益滤波器参数视不同的机台有所改变MR-J3伺服参数表*自动调谐方法和步骤a.PA08设0001,PA09先设一个初始值,如:18;b.手动或自动让该轴空跑,速度保证在让马达在1000RPM,比如螺距为5mm的,则机台该轴向线速度保证在5000MM/MIN,并且至少要有一段距离是等速运动,看机台是否会抖,有没有共振的声音发出,如果没有,则加大PA09再做;如果有,则说明PA09设定过大,则减小该值再试一次,直到测试到一个合理的不响的值,有的时候如果觉得机台刚性太低且又响,可以考虑打开滤波功能(PB13);c.把PA08设0003,到此自动调谐以完成;d.每个轴向可以设不同的PA09做自动调谐。
2024版年度SAMSON伺服120A技术手册

16
故障诊断与排除方法
01
故障诊断
设备发生故障时,显示屏将显示故障代码,可通过查阅故障代码表了解
故障原因。
02
排除方法
根据故障原因,采取相应的措施进行排除,如更换损坏的部件、调整参
数等。
2024/2/2
03
注意事项
在排除故障时,应注意安全,避免因操作不当导致人身伤害或设备损坏。
同时,应按照设备维护手册的要求进行定期维护和保养,以延长设备使
19
定期保养计划安排
每季度进行一次全面检查
包括电缆、连接器、散热器等部件的检查和 紧固。
每年进行一次深度保养
包括内部清洁、风扇更换、电容器检查等。
2024/2/2
根据使用情况调整保养周期
对于使用频繁或环境恶劣的伺服驱动器,应 适当缩短保养周期。
20
易损件更换周期建议
2024/2/2
风扇
01
建议每年更换一次,以确保散热效果良好。
在线购物平台
客服热线
联系当地授权经销商,获取 详细的产品报价和促销信息。
在京东、天猫等在线购物平 台搜索SAMSON伺服120A, 比较不同渠道的价格和服务。
拨打SAMSON客服热线,咨 询产品购买和售后服务相关 问题。
2024/2/2
32
THANKS
感谢观看
2024/2/2
33
编码器分辨率
根据实际需求选择合适 的编码器分辨率,以满 足系统精度要求。
电源电压
确认伺服驱动器所需的 电源电压与现场供电电 压相匹配。
环境条件
考虑工作环境温度、湿 度、振动等因素对系统 的影响。
2024/2/2
31
购买渠道和价格咨询
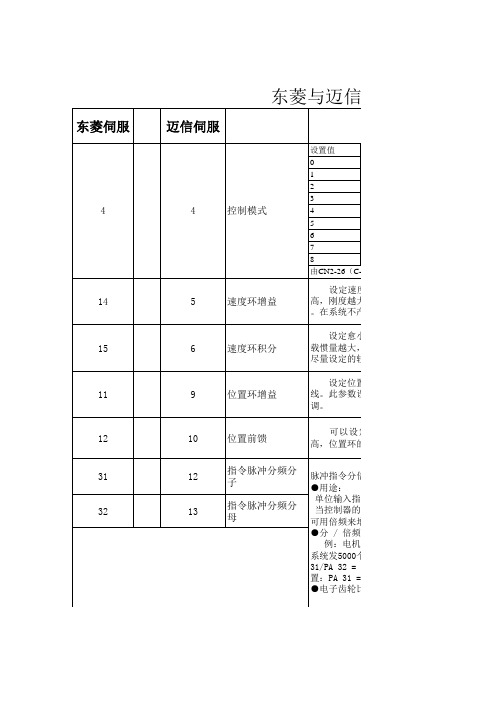
东菱与迈信伺服参数对照
)来切换第一/第二方式;设置值越%)。
2814脉冲指令输入方式值15016定位完成范围5317位置偏差过大范围5418位置偏差过大无效控制输入27 6当你需要改变电机的极性时,可以用此参数。
1520脉冲输入取反驱动禁止输入无效CCWL(CN2-20)0 有效CWL(CN2-19)0 有效该参数可设置电机走完指令脉冲输入行程后信号(COIN,CN2-3脚)的输出时序。
当位置偏差剩余脉冲数在该参数设定范围时,位置到达信号可以用偏差值=[位置偏差过大检测水平(脉冲数)]/256;置增益到较低值,又将该参数设置太小,位置偏(报警NO.9)可能在没有偏差时也被激活。
1 无效。
CCWL和CWL输入都无效,顺时针和逆36CCW转矩限制37CW转矩限制38无电流环增益常数41无电流环积分常数26无脉冲反馈输出逻辑取反值越大,刚性越强值越大,刚性越弱48可以用此参数限制电机最大转矩。
默认20制在200%额定转矩之内工作。
第一方式第二方式位置控制模式——速度控制模式——转矩控制模式——位置模式速度模式位置模式转矩模式速度模式转矩模式内部位置控制模式——内部速度控制模式——内部转矩控制模式——500~8000 【 2000 】500~8000【 2000 】500~8000【 2200 】0~100【 0 】1~9999【 1 】1~9999【 1 】分倍频功能(电子齿轮)●用途:单位输入指令脉冲所对应的电机速度和移动量可随意设定当控制器的最高可输出频率不足而不能获得所需速度时,可用倍频来增大指令频率。
●分 / 倍频功能方框图(见右图)例:电机转一圈为10000个脉冲(编码器为2500线),若系统发5000个脉冲要求电机转一圈,则电子齿轮比: PA 1/PA 32 = 10000/5000 =2/1, 即需设置:PA 31 = 2,PA 32 = 1;●电子齿轮比推荐范围:1/100≦G≦100迈信伺服参数对照参数说明CN2-26(C-MODE )来切换第一/第二方式;定速度环调节器的比例增益。
伺服驱动器规格输出功率

驱动器规格伺服驱动器规格小学常用歇后语1.八仙过海--------各显神通2.不入虎穴--------焉得虎子3.蚕豆开花--------黑心4.车到山前--------必有路5.打破砂锅--------问到底6.和尚打伞--------无法无天7.虎落平阳--------被犬欺8.画蛇添足--------多此一举9.箭在弦上--------不得不发10.井底青蛙--------目光短浅11.大海捞针--------没处寻12.竹篮打水--------一场空13.打开天窗--------说亮话14.船到桥头--------自会直15.飞蛾扑火-----自取灭亡16.百米赛跑--------分秒必争17.拔苗助长-----急于求成18.仇人相见--------分外眼红19.芝麻开花----节节高20.新官上任--------三把火21.瞎子点灯--------白费蜡22.兔子尾巴--------长不了23.偷鸡不成----蚀把米24.王婆卖瓜--------自卖自夸25.老虎屁股---- 摸不得26.老虎拉车--------谁敢27.老鼠过街-----人人喊打28.麻雀虽小--------五脏俱全29.墙上茅草----随风两边倒30.三十六计--------走为上计31.塞翁失马----焉知祸福32.壶中无酒--------难留客33.丈二和尚----摸不着头脑34.有借有还--------再借不难35.猫哭耗子---假慈悲36.铰子破皮--------露了馅37.扁担挑水---一心挂了两头38.对牛弹琴--------白费劲39.八仙聚会--------神聊40.霸王敬酒--------不干也得干41.板上订钉--------跑不了42.背鼓上门--------讨打43.草把做灯-----粗心(芯)44.竹笋出土--------节节高45.菜刀切豆腐----两面光46.钉头碰钉子--------硬碰硬47.高山上敲鼓--四面闻名(鸣)48.铁打的公鸡-----一毛不拔49.关公走麦城----骄必败50.狗咬吕洞宾--------不识好人心51.鸡蛋碰石头----不自量力52.姜太公钓鱼--------愿者上钩53.脚踏西瓜皮--滑到哪里是哪里54.孔夫子搬家--------净是书55.老鼠钻风箱-----两头受气56.留得青山在--------不怕没柴烧57.门缝里看人---把人看扁了58.泥菩萨过河--------自身难保59.泼出去的水----收不回60.骑驴看唱本--------走着瞧61.千里送鹅毛--礼轻情意重62.肉包子打狗--------有去无回63.山中无老虎---猴子称大王64.司马昭之心--------路人皆知65.外甥打灯笼---照旧(舅)66.王八吃年糕--------铁了心67.王小二过年---一年不如一年68.小葱拌豆腐-----一清二白69.小和尚念经----有口无心70.周瑜打黄盖--------两厢情愿71.赶鸭子上架----吃力不讨好72.擀面杖吹火----- -一窍不通73.瞎子戴眼镜----装饰74.猴子捞月亮--------空忙一场75.秀才遇到兵----有理讲不清76.三个臭皮匠--------顶个诸葛亮77.黄牛追兔子---有劲使不上78.和尚训道士--------管得宽79.过年娶媳妇----双喜临门80.聋子见哑巴--------不闻不问六字短语81.铜钣上钉铆钉---一是一,二是二82.里弄里扛竹竿---直来直去83.苦水里泡黄连----苦上加苦84.驴唇不对马嘴----答非所问85.猪鼻子里插葱-----装象86.只许州官放火---不许百姓点灯87.猪八戒照镜子--里外不是人88.放风筝断了线-----没指望了89.池塘里的风波-----大不了90.关门掩着耗子-----急(挤)死91.顶风顶水划船----硬撑92.东北的二人转--------一唱一和93.东洋人戴高帽----假充大个94.到火神庙求雨--------找错了门95.鲁班门前耍斧----有眼无珠96.老太太吃汤圆--------囫囵吞97.出太阳下暴雨---假情(晴)98.挂羊头卖狗肉--------虚情假意99.担着胡子过河----谦虚过度100.唱歌不看曲本--------离谱小学常用歇后语1.八仙过海--------各显神通2.不入虎穴--------焉得虎子3.蚕豆开花--------黑心4.车到山前--------必有路5.打破砂锅--------问到底6.和尚打伞--------无法无天7.虎落平阳--------被犬欺8.画蛇添足--------多此一举9.箭在弦上--------不得不发10.井底青蛙--------目光短浅11.大海捞针--------没处寻12.竹篮打水--------一场空13.打开天窗--------说亮话14.船到桥头--------自会直15.飞蛾扑火-----自取灭亡16.百米赛跑--------分秒必争17.拔苗助长-----急于求成18.仇人相见--------分外眼红19.芝麻开花----节节高20.新官上任--------三把火21.瞎子点灯--------白费蜡22.兔子尾巴--------长不了23.偷鸡不成----蚀把米24.王婆卖瓜--------自卖自夸25.老虎屁股---- 摸不得26.老虎拉车--------谁敢27.老鼠过街-----人人喊打28.麻雀虽小--------五脏俱全29.墙上茅草----随风两边倒30.三十六计--------走为上计31.塞翁失马----焉知祸福32.壶中无酒--------难留客33.丈二和尚----摸不着头脑34.有借有还--------再借不难35.猫哭耗子---假慈悲36.铰子破皮--------露了馅37.扁担挑水---一心挂了两头38.对牛弹琴--------白费劲39.八仙聚会--------神聊40.霸王敬酒--------不干也得干41.板上订钉--------跑不了42.背鼓上门--------讨打43.草把做灯-----粗心(芯)44.竹笋出土--------节节高45.菜刀切豆腐----两面光46.钉头碰钉子--------硬碰硬47.高山上敲鼓--四面闻名(鸣)48.铁打的公鸡-----一毛不拔49.关公走麦城----骄必败50.狗咬吕洞宾--------不识好人心51.鸡蛋碰石头----不自量力52.姜太公钓鱼--------愿者上钩53.脚踏西瓜皮--滑到哪里是哪里54.孔夫子搬家--------净是书55.老鼠钻风箱-----两头受气56.留得青山在--------不怕没柴烧57.门缝里看人---把人看扁了58.泥菩萨过河--------自身难保59.泼出去的水----收不回60.骑驴看唱本--------走着瞧61.千里送鹅毛--礼轻情意重62.肉包子打狗--------有去无回63.山中无老虎---猴子称大王64.司马昭之心--------路人皆知65.外甥打灯笼---照旧(舅)66.王八吃年糕--------铁了心67.王小二过年---一年不如一年68.小葱拌豆腐-----一清二白69.小和尚念经----有口无心70.周瑜打黄盖--------两厢情愿71.赶鸭子上架----吃力不讨好72.擀面杖吹火----- -一窍不通73.瞎子戴眼镜----装饰74.猴子捞月亮--------空忙一场75.秀才遇到兵----有理讲不清76.三个臭皮匠--------顶个诸葛亮77.黄牛追兔子---有劲使不上78.和尚训道士--------管得宽79.过年娶媳妇----双喜临门80.聋子见哑巴--------不闻不问六字短语81.铜钣上钉铆钉---一是一,二是二82.里弄里扛竹竿---直来直去83.苦水里泡黄连----苦上加苦84.驴唇不对马嘴----答非所问85.猪鼻子里插葱-----装象86.只许州官放火---不许百姓点灯87.猪八戒照镜子--里外不是人88.放风筝断了线-----没指望了89.池塘里的风波-----大不了90.关门掩着耗子-----急(挤)死91.顶风顶水划船----硬撑92.东北的二人转--------一唱一和93.东洋人戴高帽----假充大个94.到火神庙求雨--------找错了门95.鲁班门前耍斧----有眼无珠96.老太太吃汤圆--------囫囵吞97.出太阳下暴雨---假情(晴)98.挂羊头卖狗肉--------虚情假意99.担着胡子过河----谦虚过度100.唱歌不看曲本--------离谱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Maxsine驱动器参数表
PA-0 密码
PA-1 型号代码
PA-2 软件版本
PA-3 初始显示状态
PA-4 控制方式选择
0-位置控制
1-速度控制
2-试运行控制
3-JOG控制方式
4-编码器调零方式
5-开环运行方式(用于测试电机及编码器)
6-转矩控制方式
PA-5 速度比例增益
#值越大增益越高,刚性越大,不震荡值越大越好
PA-6 速度积分时间常数
#值越小积分速度越快,太小容易超调,太大时响应变慢PA-7 转矩滤波器
PA-8 速度检测滤波器
PA-9 位置比例增益
PA-10 位置前馈增益
PA-11 位置前馈滤波器截止频率
PA-12 位置指令脉冲分频分子
PA-13 位置指令脉冲分频分母
PA-14 位置指令脉冲输入方式
PA-15 位置指令脉冲方向取反
PA-16 定位完成范围
PA-17 位置超差检测范围
PA-18 位置超差错误无效
PA-19 位置指令平滑滤波器
PA-20 驱动禁止输入无效
PA-21 JOG运行速度
PA-22 内外速度指令选择
PA-23 最高速度限制
PA-24 内部速度1
PA-25 内部速度2
PA-26 内部速度3
PA-27 内部速度4
PA-28 到达速度
PA-29 模拟量转矩指令输入增益
PA-30 用户转矩过载报警值
PA-31 用户转矩过载报警检测时间
PA-33 模拟量转矩指令输入方向取反PA-34 内部CCW转矩限制
PA-35 内部CW转矩限制
PA-36 外部CCW转矩限制
PA-37 外部CW转矩限制
PA-38 速度试运行,JOG运行转矩限制PA-39 模拟量转矩指令零偏补偿
PA-40 加速时间常数
PA-41 减速时间常数
PA-42 S型加减速时间常数
PA-43 模拟速度指令增益
PA-44 模拟速度指令方向取反
PA-45 模拟速度指令零偏补偿
PA-46 模拟速度指令滤波器
PA-47 电机停止时机械制动器动作设定PA-48 电机运转时机械制动器动作设定PA-49 电机运转时机械制动器动作速度PA-50 转矩控制时速度限制
PA-51 动态电子齿轮有效
PA-52 第2位置指令脉冲分频分子
PA-53 低4位输入端子强制ON控制字
PA-54 高4位输入端子强制ON控制字PA-55 低4位输入端子取反控制字
PA-56 高4位输入端子取反控制字
PA-57 输出端子取反控制字
PA-58 输入端子去抖动时间常数
PA-59 演示运行。