CAN总线详解
CAN总线详解.pdf

CAN总线§1 CAN总线的性能特点§2 CAN总线的技术规范§3 CAN器件及开发
CAN(Controllor Area Network)总线技术,由于其高性能、高可靠性以及独特的设计,越来越受到人们的重视。
已被列入ISO国际标准,称为ISO11898。
CAN最初是由BOSCH公司为汽车监测、控制系统而设计的。
由于CAN总线本身的特点,其应用范围已不再局限于汽车工业,而向过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械等领域发展。
主要特点如下:
1、多主方式工作;
2、具有不同的优先级;
3、采用非破坏性总线仲裁技术
4、CAN只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据,无需专门的“调度”;
5、节点数主要取决于总线驱动电路;
6、采用短帧结构,传输时间短,受干扰概率低,具有极好的检错效果。
7、CAN的每帧信息都有CRC校验及其他检错措施,保证了数据出错率极低。
8、CAN节点在错误严重的情况下具有自动关闭输
出的功能,以使总线上其他节点的操作不受影响。
9、直接通讯距离最远可达10km(速率在5Kbps以下);通信速率可达1Mbps(通信距离最长为
40m);
§2 CAN总线的技术规范§2.1 CAN的通信参考模型
§2.2 CAN总线介质装置
§2.3 报文传送与帧结构
§2.4 错误类型和界定
§2.5 位仲裁技术。
CAN总线简介(2024版)

驱动系统的高速CAN
• 驱动系统CAN主要连接对象是发动机控制器 (ECU)、ABS控制器、安全气囊控制器、 组合仪表等等,它们的基本特征相同,都是 控制与汽车行驶直接相关的系统。
倍。这种传统布线方法不能适应汽车的发展。CAN总线可有效减少线束,节省空间。
例如某车门-后视镜、摇窗机、门锁控制等的传统布线需要20-30 根,应用总线 CAN 则
只需要 2 根。(3)关联控制在一定事故下,需要对各ECU进行关联控制,而这是传统
汽车控制方法难以完成的表1 汽车部分电控单元数据发送、接受情况
• (5)直接通信距离最远可达10km(速率5Kbps以下)。
• (6)通信速率最高可达1MB/s(此时距离最长40m)。
• (7)节点数实际可达110个。
• (8)采用短帧结构,每一帧的有效字节数为8个。
• (9)每帧信息都有CRC校验及其他检错措施,数据出错 率极低。
• (10)通信介质可采用双绞线,同轴电缆和光导纤维,一 般采用廉价的双绞线即可,无特殊要求。
可靠性高:传输故障(不论是由内部还是外部引起 的)应能准确识别出来 使用方便:如果某一控制单元出现故障,其余系统 应尽可能保持原有功能,以便进行信息交换 数据密度大:所有控制单元在任一瞬时的信息状态 均相同,这样就使得两控制单元之间不会有数据偏 差。如果系统的某一处有故障,那么总线上所有连 接的元件都会得到通知。 数据传输快:连成网络的各元件之间的数据交换速 率必须很快,这样才能满足实时要求。
• (2)网络上的节点(信息)可分成不同的优先级,可以满 足不同的实时要求。
CAN总线介绍范文
CAN总线介绍范文CAN总线,即控制器局域网络(Controller Area Network),是一种广泛应用于车辆、工业自动化和嵌入式领域的通信协议和总线系统。
CAN总线最早由汽车制造商Bosch于1986年开发,旨在解决车辆电子系统中的通信需求。
由于其高可靠性、优异的抗干扰能力和灵活的拓扑结构,CAN总线在汽车技术和工业控制领域得到了广泛的应用。
1.高可靠性:CAN总线采用了差分信号传输、信号线电平反转、CRC校验等技术,可以有效抵御电磁干扰和噪声,提高通信的可靠性和稳定性。
2.抗干扰能力强:CAN总线采用了差分传输方式,信号传输两根线,其中一根是正常逻辑信号,另一根是相反的逻辑信号,利用差分电压来表示信号的高低电平,从而减少了电磁干扰的影响。
3.灵活的拓扑结构:CAN总线可以采用总线拓扑或星形拓扑结构,适应不同的通信需求。
总线拓扑结构可以连接多个节点,而星形拓扑结构可以提供更稳定的通信环境。
4. 高速通信能力:CAN总线支持较高的通信速率,最高可达1Mbps,可以满足实时性要求较高的应用场景。
5.灵活的数据帧格式:CAN总线的数据帧格式包括标准帧和扩展帧,可以适应不同的数据通信需求。
标准帧有11位的标识符,扩展帧有29位的标识符,可以提供更多的地址空间和更灵活的数据传输方式。
6.支持多主机通信:CAN总线支持多主机通信,多个节点可以同时发送数据而不会发生冲突,提高了总线的利用率和通信效率。
CAN总线的应用广泛,特别是在车辆领域。
在汽车中,CAN总线连接了各个电子控制单元,如发动机控制单元、制动系统控制单元、空调控制单元等。
通过CAN总线,这些控制单元可以相互通信,实现车辆的集中控制和数据交换。
另外,为了满足不同的通信需求,CAN总线还衍生出了一些变种,如CAN FD(Flexible Data-Rate),它支持更高的数据传输速率,提高了通信的效率和带宽。
除了车辆领域,CAN总线还在工业自动化领域得到广泛应用。
CAN总线基础知识总结(建议收藏)

CAN总线基础知识总结(建议收藏)CAN总线基础知识总结一、CAN总线简介1、CAN总线(Controller Area Network,控制器局域网)是由德国BOSCH(博世)公司在1986年为汽车而设计的,它是一种串行通信总线,只需两根线CAN_H和CAN_L。
2、隐性(逻辑1)与显性(逻辑0)的概念:CAN总线在数据传输过程中,实际上传输的是CAN_H和CAN_L 之间的电位差。
CAN_H只能是高电平(3.5V)或悬浮状态(2.5V),CAN_L只能是低电平(1.5V)或悬浮状态(2.5)V,当CAN_H和CAN_L 都为2.5V 时,是隐性,表示逻辑1,当CAN_H为3.5V、CAN_L都为2.5V时,是显性,表示逻辑0。
表示隐性和显性逻辑的能力是CAN总线仲裁方法的基本先决条件,即所有节点都为隐性时,总线才处于隐性状态;只要有一个节点发送了显性,总线就呈现为显性状态。
3、120?电阻:必须在总线的每一节点的CAN_H和CAN_L之间接一个120?左右的电阻,以避免出现信号反射。
4、CAN技术规范CAN2.0A和CAN2.0B:CAN2.0A只有标准帧(标识符(ID)有11位);CAN2.0B除了标准帧,还有扩展帧(标识符(ID)有29位)。
5、CAN的国际标准ISO11898和ISO11519:CAN 协议经ISO 标准化后有ISO11898和ISO11519两种标准,它们对于数据链路层的定义相同,但物理层不同。
ISO11898 是波特率为125kbps-1Mbps 的CAN高速通信标准。
ISO11519 是波特率为125kbps 以下的CAN低速通信标准。
高速通信标准和低速通信标准的硬件规格也不一样,所以需要选用不同的收发器。
在收发器的规格书上都会注明高速通信用还是低速通信用,或者是符合ISO11898标准还是ISO11519标准。
6、CAN总线协议只定义了物理层和数据链路层,要将CAN总线应用于工程项目中必须制定上层的应用协议。
can总线知识点

can总线知识点
摘要:
1.can总线简介
2.can总线的特点
3.can总线的工作原理
4.can总线的应用领域
5.can总线的发展趋势
正文:
can总线是一种用于实时控制的串行通信总线,它最初由德国的Robert Bosch GmbH公司于1980年代开发。
can总线具有高速、高可靠性、强实时性、低成本等优点,因此在汽车、工业自动化、智能建筑、医疗设备等领域得到了广泛的应用。
can总线的特点是采用多主控制结构,所有节点都可以主动发送或接收消息,不存在固定的主从关系。
can总线采用位级别的仲裁机制,确保了在多个节点同时发送消息时,总线上不会出现数据冲突。
此外,can总线还具有错误检测和处理功能,能够自动检测并纠正错误,从而保证了通信的可靠性。
can总线的工作原理是,首先将数据按位编码,然后通过定时器进行分时发送。
接收节点在接收到数据后,会对其进行解码和处理。
can总线采用两线制传输,即数据线和信号线,通过电平变化来表示数据。
此外,can总线还具有扩展功能,可以通过中继器扩展总线长度。
can总线在汽车领域的应用最为广泛,主要用于汽车电子设备的通信和控
制。
例如,can总线可以用于传输发动机、制动、转向等系统的实时数据,实现汽车的智能控制。
此外,can总线在工业自动化领域也有广泛应用,如用于工厂生产线的自动化控制、智能楼宇的安防系统等。
随着物联网技术的发展,can总线的应用领域也在不断扩大。
在未来,can 总线将继续在智能交通、智能家居、智能医疗等领域发挥重要作用。
can总线的基本概念

CAN(Controller Area Network)总线是一种串行通信协议,用于在车辆和工业控制系 统等应用中传输数据。它最初由德国Bosch公司在1986年开发,现已成为一种国际标准( ISO 11898)。
CAN总线的基本概念包括以下几个方面:
1. 总线拓扑结构:CAN总线采用多主从结构,即多个节点可以同时发送和接收数据。它 使用两根差分信号线(CAN_H和CAN_L)构成一个总线,所有节点通过这两根线连接到总线 上。
6. 灵活性和可靠性:CAN总线具有高度的灵活性和可靠性。它可以支持多个节点同时发 送和接收数据,且可以在总线上动态地添加或删除节点。
总的来说,CAN总线是一种高效、可靠的通信协议,广泛应用于汽车、工业控制和航空 航天等领域。它能够满足实时性要求高、数据量大、抗干扰能力强的应用需求。
4. 碰撞检测和冲突解决:CAN总线使用非破坏性的位定时器来检测碰撞(多个节点同时 发送数据导致冲突)。当检测到碰撞时,冲突节点会立即停止发送,并在稍后的时间重新发 送。
can总线的基本概念
5. 错误检测和纠正:CAN总线具有强大的错误检测和纠正能力。它使用CRC来检测传输 错误,并使用自动重传机制来纠正错误。
can总线的基本概念
2. 帧格式:CAN总线采用基于帧的通信方式。每个数据传输被封装在一个帧中,帧包括 标识符(用于识别发送和接收节点)、数据域(存储实际数据)、控制域(包括帧类型、错 误检测等)和CRC(循环冗余校验)等。
ቤተ መጻሕፍቲ ባይዱ3. 通信速率:CAN总线支持多种通信速率,最常见的是1 Mbps、500 kbps、250 kbps 和125 kbps。通信速率的选择取决于系统需求和总线长度等因素。
CAN总线的原理及使用教程

CAN总线的原理及使用教程一、CAN总线的原理1.数据链路层:CAN总线采用的是二进制多播通信方式,即发送方和接收方之间没有直接的连接关系,所有节点共享同一个总线。
在一个CAN总线系统中,每个节点都可以发送和接收信息。
当一个节点发送消息时,所有其他节点都能接收到该消息。
2.帧格式:CAN总线使用的是基于帧的通信方式,每个消息都被封装在一个CAN帧中。
帧由起始标志、ID、数据长度码、数据和校验字段组成。
其中,ID是唯一标识符,用来区分不同消息的发送者和接收者。
数据长度码指示了消息中数据的长度。
校验字段用于检测数据的完整性。
3. 传输速率:CAN总线的传输速率可根据需求进行配置,通常可选的速率有1Mbps、500Kbps、250Kbps等。
高速传输速率适用于对实时性要求较高的应用,而低速传输速率适用于对实时性要求不高的应用。
4.错误检测:CAN总线具有强大的错误检测能力,能够自动检测和纠正错误。
它采用了循环冗余校验(CRC)算法,通过对数据进行校验,确保数据的完整性。
如果数据传输过程中发生错误,接收方能够检测到错误,并通过重新请求发送来纠正错误。
二、CAN总线的使用教程1. 硬件连接:在使用CAN总线之前,需要先进行硬件连接。
将所有节点的CANH和CANL引脚连接到同一个总线上,并通过双终端电阻将CANH和CANL引脚与Vcc和地连接。
确保所有节点的通信速率和电气特性相匹配。
2.软件设置:使用相应的软件工具对CAN总线进行配置。
根据具体需求,设置通信速率、总线负载、数据帧格式等参数。
还需要为每个节点分配唯一的ID,用于区分发送者和接收者。
3.数据传输:使用软件工具编写代码,实现消息的发送和接收。
发送消息时,需要指定ID、数据长度和数据内容。
接收消息时,需要监听总线上的消息,并根据ID判断是否为自己需要的消息。
通过合理的逻辑处理,实现节点之间的数据交换和通信。
4.错误处理:CAN总线在数据传输过程中可能会发生错误,如位错误、帧错误等。
CAN总线介绍
CAN总线介绍CAN总线,即控制器区域网络(Controller Area Network),是一种国际标准的串行通信协议,用于在汽车和工业领域中进行高速数据传输。
CAN总线的设计目标是提供一个可靠、高效、实时的通信方式,以满足复杂系统的需求。
下面将详细介绍CAN总线的特点、结构、工作原理以及应用领域。
一、CAN总线的特点:1.高可靠性:CAN总线采用差分信号传输,具有较强的抗干扰能力,能够在恶劣的工作环境下保持稳定的通信质量。
2.高效性:CAN总线采用了固定格式的数据帧和强大的错误检测与修复机制,使得数据传输更加高效可靠。
3.实时性:CAN总线支持实时性要求较高的应用,可以实现微秒级的数据传输延迟。
4.灵活性:CAN总线可以连接多个节点,节点之间可以通过CAN总线进行双向通信,同时支持错误检测与错误恢复。
5.易于应用:CAN总线采用了开放式的标准协议,有着广泛的支持和应用经验,易于集成和开发。
二、CAN总线的结构:1. 主控器(Master):负责总线管理,包括数据的发送和接收、帧结构的解析、错误处理等。
2. 从控器(Slave):负责接收主控器发送的数据帧,并根据需要进行相应的处理和响应。
3.总线线缆:用于在各个节点之间传输数据和控制信息的物理介质。
4. 高速传输率:CAN总线通常有两种速率可选,分别是高速CAN(1Mbps)和低速CAN(125kbps)。
三、CAN总线的工作原理:1.数据帧格式:CAN总线的数据帧包括了4个主要部分:起始符、控制字段、数据字段和结束符。
其中,控制字段包括了帧类型、帧长度、帧优先级、帧标识符等信息。
2.帧结构与地址:CAN总线通过帧标识符来区分不同的数据帧,并根据优先级进行数据传输,同时可以通过标识符来实现多个不同类型的数据帧。
3.错误检测与修复:CAN总线采用循环冗余校验(CRC)方法进行错误检测和修复,可以检测到传输过程中的位错误、帧错误等,并进行相应的错误恢复措施。
CAN总线原理与应用基础
CAN总线原理与应用基础CAN(Controller Area Network)总线是一种高可靠性、高性能、实时性强的通信总线,广泛应用于汽车电子、工业控制、机器人等领域。
本文将从CAN总线的基本原理、应用领域以及优势等方面进行详细介绍。
一、CAN总线的基本原理CAN总线是一种串行通信总线,采用非归零码 NRZ(Non-Return-to-Zero)的编码方式。
它由两根线组成,分别是CAN-H(CAN高)和CAN-L (CAN低)。
CAN总线采用差分传输方式,即CAN-H和CAN-L之间的电压差代表了数据的值。
CAN总线的通信速率可以达到1Mbps,具有很高的传输效率。
CAN总线采用了CSMA/CD(Carrier Sense MultipleAccess/Collision Detection)的冲突检测机制,保证了多个节点同时发送数据时不会产生冲突。
当一个节点要发送数据时,首先会监听总线上的电平,如果检测到总线上没有数据传输,则将数据发送出去。
如果多个节点同时发送数据,会发生冲突,此时节点会停止发送数据,并等待一个随机时间后再次发送,以避免冲突。
CAN总线还具有差错检测和纠正的功能。
每个CAN帧都附带有一个CRC(Cyclic Redundancy Check)校验码,接收节点会对接收到的数据进行校验,如果校验失败,则会发送错误帧。
此外,CAN总线还支持错误传播,即如果一个节点发送了错误的数据,其他节点会通过错误帧检测到错误,并进行相应的处理。
二、CAN总线的应用领域1.汽车电子:CAN总线最早应用于汽车电子领域,用于连接汽车内部的各个电子控制单元(ECU),如发动机控制单元、仪表盘、防抱死制动系统等。
CAN总线可以实现这些控制单元之间的数据交换和协调,提高汽车的性能和安全性。
2.工业控制:在工业控制领域,CAN总线被广泛应用于PLC(可编程逻辑控制器)、传感器、执行器等设备之间的通信。
CAN总线可以实现实时的数据传输和控制,提高工业自动化系统的可靠性和性能。
CAN总线教程详解

CAN总线教程详解CAN总线是一种现代的、高性能的通信总线技术,被广泛应用于汽车电子、工业控制、航空航天等领域。
CAN总线具有高可靠性、高带宽、低延迟等优点,能够满足实时性要求较高的应用场景。
本文将对CAN总线的基本原理、通信方式、物理层、协议以及应用进行详细介绍。
首先是CAN总线的基本原理。
CAN(Controller Area Network)总线是一种串行通信总线,其基本原理是利用差分信号传输数据,实现多个节点之间的通信。
CAN总线采用一种分布式的控制方式,多个节点可以同时进行发送和接收数据,而不会造成冲突。
此外,CAN总线还采用了一种优先级的机制,更高优先级的节点可以中断低优先级节点的传输,从而实现数据的有序传输。
接下来是CAN总线的通信方式。
CAN总线支持两种通信方式:广播和点对点。
在广播方式中,一个节点发送的数据可以被其他所有节点接收,而在点对点方式中,数据只能被指定的接收节点接收。
广播方式适用于需要向所有节点发送相同的数据的应用场景,而点对点方式适用于需要向指定节点发送数据的场景。
然后是CAN总线的物理层。
CAN总线的物理层采用了差分信号传输,即通过两根线分别传输正负两个相位相反的信号。
这种差分传输方式具有抗噪声能力强、抗干扰性好等优点。
CAN总线采用了标准的线缆以及连接器,可以实现节点间的高速可靠通信。
此外,CAN总线还具有自动的错误检测和纠正机制,能够实时检测线路的故障情况。
接下来是CAN总线的协议。
CAN总线采用了一种先进的帧格式,用于定义数据的传输规则。
每一帧包括了数据、标志位、ID等字段,多个帧组成了一个消息。
CAN总线使用了基于标识符的帧过滤机制,能够实现高效的消息传输。
此外,CAN总线还支持远程帧,即节点可以向其他节点发送请求,请求其发送指定的数据。
最后是CAN总线的应用。
CAN总线被广泛应用于汽车电子领域,用于汽车内部各个控制单元之间的通信。
例如,发动机控制单元、制动系统控制单元、仪表盘控制单元等可以通过CAN总线进行数据交互。
CAN总线详细教程

CAN总线详细教程
1、CAN总线介绍
CAN(Controller Area Network)控制器区域网络,是一种汽车电子系统中的主要总线,可用于汽车中各个电子系统之间的通信。
它是一种标准化的总线,具有很高的时序要求,可以承载多种信息,灵活性好,安全性能好,适用于多种应用场景,如汽车、航空、工业控制等。
CAN总线是1981年开发出来的,由Robert Bosch GmbH开发,也是早期汽车电子系统中最主要的总线。
它是一种可靠性较高的通信协议,具有简洁可靠、发送数据率较高和发送范围较远等特点,可在多种应用场景中使用,且在电子领域受到了广泛的应用。
2、CAN总线特点
可靠性高:CAN网络具有多种保护机制,而且在进行数据传输时能够自动检测数据的完整性,这使得CAN网络在发送数据时的正确率更高,可靠性也比一般的网络要高。
数据传输速率高:CAN网络采用时间总线的形式,可以在一定的时间内完成数据传输,这样可以保证在传输时的速率更高。
发送范围较远:CAN网络支持的信号线长度非常的长,可以发送到大范围的地方,这样可以方便数据的传输。
总线简洁可靠:CAN网络只需要两根信号线,而且能够很好的保护数据的传输,所以在电子产品中被广泛的使用。
canbus总线
CAN总线1. 简介CAN(Controller Area Network)总线是一种串行通信协议,广泛应用于汽车、工控等领域中。
它是一种高可靠性、高抗干扰的通信方式,具有多主机、多从机的结构,能够支持多个节点之间的通信。
2. CAN总线的特点2.1 高可靠性CAN总线采用差分传输方式,通过在两条通信线上分别传输互补的信号来实现数据传输,可以有效地抵抗传输线上的电磁干扰和噪声。
此外,CAN总线拥有校验机制,当数据传输过程中发生错误时,接收端可以通过异或校验位来检测错误,并进行纠正。
2.2 多主从结构CAN总线可以支持多个主机和多个从机的通信。
主机用于发送命令和控制数据的节点,从机用于接收并执行命令的节点。
这种结构使得CAN总线非常适用于分布式控制系统,能够实现多个节点之间的实时通信。
2.3 高速通信CAN总线的通信速率可以达到几百kbps甚至几Mbps,可以满足多数应用的通信需求。
高速通信可以保证节点之间的实时性,并且降低通信延时。
2.4 灵活的网络拓扑结构CAN总线支持多种网络拓扑结构,包括总线型、星型、树型等。
这种灵活的结构使得CAN总线可以适用于不同的应用场景,如汽车电子系统中的各种控制模块之间的通信。
3. CAN总线的应用3.1 汽车领域CAN总线在汽车领域中得到了广泛应用。
汽车中有许多控制模块,如发动机控制单元(ECU)、制动控制单元(BCU)、车身控制单元(BCU)等,这些模块之间需要进行实时通信才能保证汽车的正常运行。
CAN总线通过其高可靠性和实时性,成为了汽车电子系统的首选通信协议。
3.2 工控领域在工控领域中,CAN总线也得到了广泛应用。
工控设备通常需要各种传感器和执行器之间的实时通信,以实现工艺过程的监控和控制。
CAN总线可以提供高可靠性的通信,并且支持多主从结构,非常适用于工控场景。
4. CAN总线的实现4.1 硬件实现CAN总线的硬件实现主要包括CAN控制器和CAN收发器。
CAN总线的使用

CAN总线的使用CAN(Controller Area Network)总线是一种多主机、多线程、分散控制系统中常用的实时通信协议,被广泛应用于车载电子、工业自动化、航空航天等领域。
本文将从CAN总线的基本原理、应用场景、使用方法等方面进行介绍。
一、CAN总线的基本原理CAN总线是由以位为基本单元的串行通信协议,其通信原理可以简单概括为:数据发送方通过CAN控制器将数据转换成一系列的数据帧,并通过CAN总线发送给接收方;接收方的CAN控制器接收到数据帧后,将其还原成原始数据。
CAN总线采用了CSMA/CR(Carrier Sense Multiple Access with Collision Resolution)的数据传输方式,即对总线中数据帧的冲突进行检测和解决。
二、CAN总线的应用场景1.车载电子系统中,CAN总线常用于汽车中的各种电子控制单元(ECU)之间的通信。
例如,引擎控制单元(ECU)、刹车控制单元(ECU)、空调控制单元(ECU)等通过CAN总线进行实时的数据交换和协调。
2.工业自动化领域中,CAN总线广泛应用于工业机器人的控制、传感器的数据采集与通信等方面。
CAN总线在工业环境中的抗干扰能力较强,可以满足高噪声环境下的可靠通信要求。
3.航空航天领域中,CAN总线可用于飞机电子设备之间的数据通信,如航空仪表、飞行控制系统、通信导航系统等。
三、CAN总线的使用方法1.硬件部分:(1)CAN总线连接:CAN总线通常使用双绞线进行连接,其中一根线为CAN High(CAN_H),另一根线为CAN Low(CAN_L)。
CAN_H和CAN_L通过终端电阻连接至VCC和GND,即电压分配电阻(VCC上的120欧姆电阻和GND上的120欧姆电阻)。
(2)CAN控制器选择:需要选择适合应用需求的CAN总线控制器。
(3)CAN总线的连接节点:将需要通信的CAN节点连接至CAN总线上,通常通过CAN收发器进行连接。
CAN总线技术详解
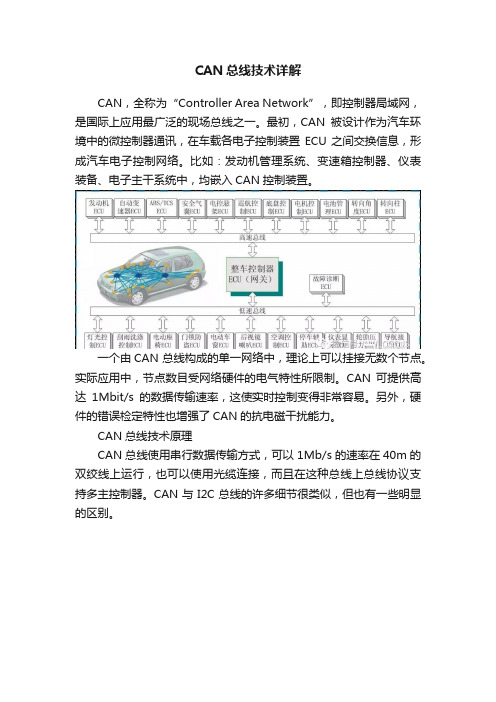
CAN总线技术详解CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。
一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。
实际应用中,节点数目受网络硬件的电气特性所限制。
CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。
另外,硬件的错误检定特性也增强了CAN的抗电磁干扰能力。
CAN总线技术原理CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。
CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。
对每个节点来说,无论数据是否是发给自己的,都对其进行接收。
每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。
在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。
当几个站同时竞争总线读取时,这种配置十分重要。
当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。
CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。
每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。
我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。
当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。
汽车级CAN总线详细教程看过了很好
汽车级CAN总线详细教程看过了很好第一部分:什么是CAN总线CAN(Controller Area Network)总线是一种用于车辆内部通信的串行总线系统。
它是一种多主机、实时、分布式通信系统,专门用于连接车辆中各种电子控制单元(ECU)之间的数据传输。
CAN总线的基本构成有两个部分,一是CAN控制器,负责发起消息和接收消息,二是CAN收发器,负责将数字信号转换为物理信号进行传输。
第二部分:CAN总线的特性和优势1. 带宽高:CAN总线的通信速率可以从几千bps到几百kbps不等,足以满足车辆内部各个电子控制单元(ECU)之间的数据传输需求。
2.抗干扰性强:CAN总线采用差分信号传输方式,能够有效抑制信号干扰,提高系统的可靠性和稳定性。
3.支持多主机:CAN总线支持多个ECU同时发送和接收数据,实现了分布式控制,增加了系统的灵活性和可扩展性。
4.实时性好:CAN总线具有很高的实时性能,能够在毫秒级的时间内完成数据传输,满足车辆内部各个系统之间的实时控制需求。
5.省电性高:CAN总线采用低功耗的差分传输方式,能够节省能量,并且具有很好的可靠性和稳定性。
6.故障诊断能力强:CAN总线具有自动故障检测和故障诊断功能,能够及时检测和排除系统故障,提高了整车的可靠性和安全性。
第三部分:CAN总线的应用领域CAN总线主要应用于车辆内部各种系统之间的数据传输,例如车载电子系统、发动机管理系统、传动系统、车身控制系统、底盘控制系统等。
通过CAN总线的连接,各个ECU之间可以实现数据的交换和共享,提高整车的性能和安全性。
第四部分:CAN总线的工作原理CAN总线的工作原理是基于基于CSMA/CD(Carrier Sense Multiple Access/Collision Detection)协议,即载波监听多路访问/冲突检测协议。
简单来说,发送数据的ECU首先会监听总线上的信号情况,如果检测到总线空闲,则可以发送数据。
CAN总线详细教程
CAN总线详细教程CAN总线是一种高速串行通信协议,广泛应用于自动化控制系统、汽车电子、工业设备等领域。
它具有高速传输、可靠性强和抗干扰能力强等优点。
本篇文章将介绍CAN总线的基本原理、通信方式、帧格式以及应用示例等内容。
一、CAN总线基本原理CAN(Controller Area Network)总线是一种多主机、多从机的通信系统,包括一个主控器和多个节点。
主控器负责决定总线上的通信速率和优先级,节点之间的通信通过总线上发送和接收的消息进行。
二、CAN总线通信方式1.基于广播的通信方式:主控器发送的消息会被总线上的所有节点接收。
节点根据消息的标识符判断是否需要对其进行处理。
2.基于点对点的通信方式:主控器发送的消息只会被消息的接收者节点接收。
消息的接收者是通过消息的标识符来确定的。
在实际应用中,一般会结合这两种通信方式来实现复杂的通信需求。
三、CAN总线帧格式1.数据帧:用于实际传输数据。
数据帧包括标识符、控制字段、数据字段和校验字段等。
2.远程帧:用于请求节点发送数据。
远程帧只包括标识符和控制字段。
标识符用于标识消息的类型和优先级,控制字段用于进行错误检测和数据传输的控制。
数据字段包含要传输的数据,校验字段用于检测数据传输过程中是否出现错误。
四、CAN总线应用示例以汽车电子控制系统为例,介绍CAN总线的应用。
在汽车上,CAN总线被广泛应用于发动机控制、刹车系统、空调系统等各种电子控制单元之间的通信。
通过CAN总线,这些电子控制单元可以实现信息的共享和协同工作。
例如,发动机控制单元可以将发动机的运行状态通过CAN总线发送给其他控制单元,供其他控制单元进行相应的控制。
刹车系统可以通过CAN总线获取发动机控制单元的信息,判断是否需要进行制动操作。
空调系统可以根据发动机控制单元的信息,调整空调的工作状态等。
总结:CAN总线是一种高速串行通信协议,具有高可靠性和抗干扰能力强的特点。
它采用差分传输技术,实现多主机、多从机的通信。
汽车CAN总线详细教程_精心编制_不可错过
汽车CAN总线详细教程_精心编制_不可错过CAN总线是一种广泛应用于汽车领域的通信协议,它可以实现车内各个控制单元之间的数据交换和通信。
本篇文章将详细介绍CAN总线的原理、应用以及常见问题解决方法,帮助读者更好地理解和应用CAN总线。
一、CAN总线原理CAN(Controller Area Network)总线是一种串行通信协议,由国际标准化组织(ISO)制定。
它采用了差分信号线,即CAN_H和CAN_L线,通过差值来表示数据位的状态,从而提高了抗干扰能力。
CAN总线主要包含两个基本元素:节点和总线。
在CAN总线中,每个节点都有唯一的地址,可以向总线上传输数据,也可以从总线上接收数据。
节点之间的通信是基于事件驱动的方式进行的。
当一个节点有数据要发送时,它会首先检查总线是否空闲,如果空闲则发送数据,否则等待。
二、CAN总线应用CAN总线在汽车领域应用广泛,其中最重要的应用之一是汽车电子控制单元(ECU)之间的通信。
通过CAN总线,不同的ECU可以传输各种信息,如引擎控制、传输控制、制动控制等。
这样可以实现各个系统之间的数据共享和协同工作,提高汽车性能和安全性。
此外,CAN总线还可以用于连接其他外设,如传感器、执行器等。
通过CAN总线,这些外设可以与其他ECU进行通信,实现数据的传输和处理。
三、CAN总线常见问题解决方法1.总线冲突:当多个节点同时发送数据时,可能会发生总线冲突。
解决方法是通过帧ID来确定优先级,具有较高优先级的节点可以打断正在发送数据的节点。
2.数据传输错误:由于CAN总线的差分信号线,抗干扰能力较强,但仍然有可能发生数据传输错误。
解决方法是使用CRC校验和来检测和纠正错误。
3.总线负载过高:当连接的节点数量过多或数据传输速率过高时,可能会导致总线负载过高。
解决方法是调整总线速率或分散数据传输。
4.总线错误报告:当一些节点发生错误时,可以通过CAN总线发送错误报告。
其他节点可以根据错误报告来采取相应措施。
CAN总线原理及应用

CAN总线原理及应用CAN(Controller Area Network)总线是一种高速、可靠性强的实时通信总线,广泛应用于汽车、工业自动化、航空航天等领域。
本文将从CAN总线的基本原理、传输帧格式、错误检测和纠正机制、应用领域等方面进行详细介绍。
一、CAN总线的基本原理CAN总线采用串行通信方式,由两条差分信号线CANH和CANL构成。
其中,CANH和CANL两条线分别相互倒置,从而在传输数据时形成差分信号。
CAN总线采用仲裁机制,即多个节点同时发送数据时,按照优先级依次发送,避免多个节点同时发送导致的数据冲突。
二、CAN总线的传输帧格式CAN总线的传输帧由固定长度的报文组成,分为标准帧和扩展帧两种格式。
标准帧的数据长度为11位,扩展帧的数据长度为29位。
传输帧的基本结构包括起始位(SOF)、帧类型(FF)、数据标识符(Identifier)、数据长度码(DLC)、数据域(Data field)、校验位(CRC)和结束位(EOF)。
可以通过帧类型来区分标准帧和扩展帧,数据标识符用于标识发送数据的节点,数据长度码表示数据域的长度,校验位用于检测数据在传输过程中的错误。
三、CAN总线的错误检测和纠正机制为了保证CAN总线的高可靠性,CAN总线采用了重要的错误检测和纠正机制。
其中,CRC(Cyclic Redundancy Check)循环冗余校验码用于检测数据传输过程中的错误,通过比对接收到的CRC码和发送方预先计算的CRC码是否一致来判断数据的正确性。
此外,CAN总线还采用了错误报告机制,如错误标志、错误定位和错误状态等,方便节点检测和处理异常情况。
四、CAN总线的应用领域由于CAN总线具有高速、实时性好、抗干扰性强等特点,因此在很多领域都得到了广泛应用。
其中,汽车领域是CAN总线应用最为广泛的一个领域。
CAN总线在汽车中主要用于车载网络通信,如发动机控制、底盘控制、仪表盘和车门控制等。
此外,CAN总线还被广泛应用于工业自动化领域,如数控机床、机器人、智能仓储系统等。
can总线知识点

can总线知识点一、Can总线简介1.Can总线的发展历程Can总线(控制器局域网,Controller Area Network)最早由德国的Robert Bosch GmbH公司于1980年代研发,用于汽车电子设备的通信。
随着技术的不断发展,Can总线逐渐成为了一种广泛应用于各个领域的通信协议。
2.Can总线的应用领域Can总线起初主要用于汽车电子设备之间的通信,如发动机控制、刹车系统、仪表盘等。
如今,Can总线已广泛应用于工业自动化、智能建筑、医疗设备、交通运输等多个领域。
二、Can总线的基本原理1.Can总线的通信模式Can总线采用多主通信模式,即网络中的每个节点(设备)都可以主动发送或接收数据,不存在固定的主从关系。
通过这种方式,保证了通信的实时性和高效性。
2.Can总线的数据传输速率Can总线的数据传输速率一般在1Mbps左右,适用于实时性要求较高的场景。
同时,Can总线支持高速、中速和低速三种传输速率,可以根据实际应用需求进行选择。
三、Can总线的硬件结构1.Can控制器Can控制器是Can总线的核心部分,负责处理报文发送、接收、错误检测等功能。
常见的Can控制器有82C200、82C500等。
2.Can总线驱动器Can总线驱动器负责将Can控制器发出的信号转换为实际的电信号,驱动Can总线传输。
常见的Can总线驱动器有TJA1020、MCP2003等。
3.Can总线传输介质Can总线的传输介质主要有两种:一种是双绞线,另一种是光纤。
双绞线传输速率较低,但成本较低;光纤传输速率较高,但成本较高。
四、Can总线的软件协议1.Can总线的报文格式Can总线的报文格式包括起始符、仲裁字段、控制字段、数据字段、CRC 字段、应答位和结束符。
其中,仲裁字段包含了发送优先级,保证了高优先级的消息优先发送。
2.Can总线的通信规则Can总线的通信规则主要包括报文发送、报文接收、错误检测与处理等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车CAN总线详解概述CAN(Controller Area Network)总线协议是由 BOSCH 发明的一种基于消息广播模式的串行通信总线,它起初用于实现汽车内ECU之间可靠的通信,后因其简单实用可靠等特点,而广泛应用于工业自动化、船舶、医疗等其它领域。
相比于其它网络类型,如局域网(LAN, Local Area Network)、广域网(WAN, Wide Area Network)和个人网(PAN, Personal Area Network)等,CAN 更加适合应用于现场控制领域,因此得名。
CAN总线是一种多主控(Multi-Master)的总线系统,它不同于USB或以太网等传统总线系统是在总线控制器的协调下,实现A节点到B节点大量数据的传输,CAN网络的消息是广播式的,亦即在同一时刻网络上所有节点侦测的数据是一致的,因此比较适合传输诸如控制、温度、转速等短消息。
CAN起初由BOSCH提出,后经ISO组织确认为国际标准,根据特性差异又分不同子标准。
CAN国际标准只涉及到 OSI(开放式通信系统参考模型)的物理层和数据链路层。
上层协议是在CAN标准基础上定义的应用层,市场上有不同的应用层标准。
发展历史1983年,BOSCH开始着手开发CAN总线;1986年,在SAE会议上,CAN总线正式发布;1987年,Intel和Philips推出第一款CAN控制器芯片;1991年,奔驰500E 是世界上第一款基于CAN总线系统的量产车型;1991年,Bosch发布CAN 2.0标准,分 CAN 2.0A (11位标识符)和 CAN 2.0B (29位标识符);1993年,ISO发布CAN总线标准(ISO 11898),随后该标准主要有三部分:ISO 11898-1:数据链路层协议ISO 11898-2:高速CAN总线物理层协议ISO 11898-3:低速CAN总线物理层协议注意:ISO 11898-2和ISO 11898-3物理层协议不属于BOSCH CAN 2.0标准。
2012年,BOSCH发布 CAN FD 1.0 标准(CAN with Flexible Data-Rate),CAN FD 定义了在仲裁后确使用不同的数据帧结构,从而达到最高 12Mbps 数据传输速率。
CAN FD与CAN 2.0协议兼容,可以与传统的CAN 2.0设备共存于同样的网络标准化CAN标准分为底层标准(物理层和数据链路层)和上层标准(应用层)两大类。
CAN底层标准主要是 ISO 11898 系列的国际标准,也就是说不同厂商在CAN总线的物理层和数据链路层定义基本相同;而上层标准,涉及到例如流控制、设备寻址和大数据块传输控制等,不同应用领域或制造商会有不同的做法,没有统一的国际标准。
底层标准CAN底层标准涵盖OSI模型中的物理层和数据链路层,底层标准包括:ISO 11898-1: 2015 定义CAN总线的数据链路层(DLL)和电气信号标准,描述CAN总线的基本架构,定义不同CAN总线设备在数据链路层通信方式,详细说明逻辑链接控制(LLC)和介质访问控制(MAC)子层部分;ISO 11898-2: 2003 定义高速CAN总线(HS-CAN)物理层标准,最高数据传输速率 1Mbps ,应用为两线平衡式信号(CAN_H, CAN_L),HS CAN是汽车动力和工业控制网络中应用最为广泛的物理层协议;ISO 11898-3: 2006 定义低速CAN总线(LS-CAN, Fault-Tolerant CAN)物理层标准,数据传输速率在 40Kbps ~ 125Kbps 。
Fault-Tolerant是指总线上一根传输信号失效时,依靠另外的单根信号也可以通信,LS CAN主要应用于汽车车身电控单元之间通信;ISO 11898-4: 2004 定义CAN总线中的时间触发机制(Time-TriggeredCAN, TTCAN),定义与ISO 11898-1 配合的帧同步实体,实现汽车ECU之间基于时间触发的通信方式。
注意,ISO 11898-1 是基于事件驱动(Event-Driven)的通信,它对于高负荷总线上,尤其是低优先级的消息会造成较大的延迟,而基于时间触发的ISO 11898-4 标准的初衷也正是为解决该问题,确保CAN总线上可靠的消息传输;ISO 11898-5: 2007 对ISO 11898-2高速CAN总线的补充,并参照ISO 8802-2,定义在总线闲置时的节电特性;ISO 11898-6: 2013 对ISO 11898-2 和ISO 11898-5 的补充,并参照ISO 8802-2,定义使用可配置的帧实现选择性唤醒总线的机制;ISO 16845-1: 2004 定义测试符合ISO 11898-1标准CAN应用的方法和条件;ISO 16845-2: 2014 定义包括特定功能下可以选择性唤醒总线的CAN收发器的测试实例和测试要求,也称为CAN总线的一致性测试CAN总线底层标准与ISO/OSI模型的对应关系,如图1所示。
对于媒体专用接口(Medium Dependent Interface, MDI),没有统一的国际标准。
CiA DS-102 (CiA: CAN in Automation )仅定义使用专用连接器(DB9),并对PIN定义作出一定规范。
图1. CAN总线标准上层标准虽然底层标准相同,不同应用领域和组织会制定不同的上层标准。
有的厂商开发并推广其应用层标准,在某些领域得以广泛应用。
对于汽车行业来说,几乎每家厂商都有自己的CAN上层标准。
比较流行的有工业自动化领域 CiA 的 CANopen ,Rockwell 的 DeviceNet;嵌入式控制领域 Kvaser 的 CAN Kingdom;智能设备控制 Honeywell 的 SDS;汽车诊断 ISO 14229 定义的 UDS,和中重型汽车CAN总线标准 SAE J1939 。
如表1示。
表1. CAN上层标准举例总线特点符合OSI开放式通信系统参考模型;两线式总线结构,电气信号为差分式;多主控制。
在总线空闲时,所有的单元都可开始发送消息,最先访问总线的单元可获得发送权;多个单元同时开始发送时,发送高优先级ID 消息的单元可获得发送权;消息报文不包含源地址或者目标地址,仅通过标识符表明消息功能和优先级;基于固定消息格式的广播式总线系统,短帧结构;事件触发型。
只有当有消息要发送时,节点才向总线上广播消息;可以通过发送远程帧请求其它节点发送数据;消息数据长度0~8 Byte;错误检测功能。
所有节点均可检测错误,检测出错误的单元会立即通知其它所有单元;发送消息出错后,节点会自动重发;故障限制。
节点控制器可以判断错误是暂时的数据错误还是持续性错误,当总线上发生持续数据错误时,控制器可将节点从总线上隔离;通信介质可采用双绞线、同轴电缆和光导纤维,一般使用最便宜的双绞线;理论上,CAN总线用单根信号线就可以通信,但还是配备了第二根导线,第二根导线与第一根导线信号为差分关系,可以有效抑制电磁干扰;在40米线缆条件下,最高数据传输速率1Mbps;总线上可同时连接多个节点,可连接节点总数理论上是没有限制的,但实际可连接节点数受总线上时间延迟及电气负载的限制;未定义标准连接器,但经常用9脚DSUB应用在当今汽车应用领域,车内电控单元(Electrical Control Unit, ECU)可能多达 70 个,除了引擎控制单元(Engine Control Unit, ECU )外,还存在传动控制、安全气囊、ABS、巡航控制、EPS、音响系统、门窗控制和电池管理等模块,虽然某些模块是单一的子系统,但是模块之间的互连依然非常重要。
例如,有的子系统需要控制执行器和接收传感器反馈,CAN总线可以满足这些子系统数据传输的需求。
汽车内子模块的总线互连架构使得软件可以更轻易地实现安全、经济和便利等新特性,相比传统汽车网络架构中模块单元直接连接更加经济。
CAN总线实现汽车内互连系统由传统的点对点互连向总线式系统的进化,大大降低汽车内电子系统布线的复杂度,如图2所示。
背景:随着电气化和智能化,汽车上的电子单元越来越多,电控单元组网需求也日渐迫切!福特Fusion汽车@2013-70个ECU单元-75个传感器-150个激励器自动驾驶汽车@2030 -Prediction -120个ECU单元-100个传感器-200个激励器图2. 传统网络结构VS 总线式结构在 VW (大众汽车)的定义(SSP 269)中,根据应用范围将车内CAN总线分为三类:•Convenience CAN /舒适CAN网络,主要控制车门窗、空调等设备,最高传输速度100 kbps•Powertrain CAN /动力CAN网络,主要控制动力相关设备,如发动机、制动、ABS等,最高传输速度500 kbps•Infotainment CAN /信息娱乐CAN网络,主要控制收音机、电话和导航等设备,最高传输速度100 kbps根据数据传输速度不同CAN总线分两类:高速CAN(ISO 11898-2)和低速CAN(ISO 11898-3)。
高速CAN(按BOSCH说法,也叫CAN-C),数据速率在 125kbps ~ 1Mbps,应用在实时性要求高的节点,如引擎管理单元、电子传动控制、ESP和仪表盘等;低速CAN (CAN-B),数据速率在 5kbps ~ 125kbps,应用在实时性要求低的节点,主要在舒适和娱乐领域,如空调控制、座椅调节、灯光、视镜调整等,这些节点对实时性要求不高,而且分布较为分散,线缆较易受到损坏,低速CAN的传输速度即可满足要求,而且单根线缆也可以工作,很好地适应了以上需求。
不同速度类型的CAN总线设备不能直接连在同一路总线上,它们之间需要通过网关隔离。
CAN总线在汽车诊断领域的应用也非常广泛,ECU直接挂载在总线上,可以很快地获取诊断所需的信息。
传统的汽车诊断接口(如KWP2000)应用逐渐减少。
图2a示意了汽车内总线系统及电子设备的逻辑分布,总线系统包括CAN、LIN、FlexRay 和MOST 。
注意,车载以太网在图中未列出,但它的应用日渐广泛。
以上不同类型和速度的总线,通过网关 Gateway 模块相互通信。
图2a. 汽车内总线系统举例局限性由于CAN总线仲裁的特点,即使往总线上周期性发送消息,也不能保证节点可以确定(周期)地收到消息,CAN不适合对时间特别敏感的应用;最高传输速率只有 1Mbps ,对于汽车自动驾驶应用的数据传输,或者视频音频传输带宽不足。
为解决这方面的需求,CAN FD 速度有所上升,另外还有 MOST、LVDS 和以太网等;对于简单的应用,高成本的CAN总线虽然可靠性很高,但有点浪费。