六轴机器人直角坐标系
机器人的运动轴和坐标系

机器人系统中各个运动轴的定义
3.1 机器人运动轴与坐标系
所
A5
轴5
处
A4
位
轴4
置
A3
———
A6 轴6
轴3
—
【
课
堂
认
A2
轴2
知
】
A1
轴1
KUKA 机器人
ABB 机器人
典型机器人操作机各运动轴
A1 、 A2 和 A3 三轴(轴 1 、轴 2 和轴 3 )称为基本轴或主轴, 用以保证末端执行器达到工作空间的任意位置。
3.1.1 机器人运动轴的名称
所
处 位
通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装
置——轴— , 基座轴 和工装轴 统称 外部轴 。
—
机器人轴
【 课
机器机器人人操操作作机(机本(体)本的轴机,)属
堂
的轴,属于机器人本身。
认
知
】
基座轴
机器人整体移动的轴,如行走 轴(滑移平台或导轨)。
工装轴
机器人轴和基座轴以外的 轴,指使工装夹具翻转和 回转的轴
置 ———
—
关键步骤:系统上电开机 机器人到 B 工位 / 旋转回转机
→ →
A B
工位机器人手动示教 → 工位机器人手动示教。
选择关节坐标系
→
移动
【
课
堂
认
知
】
工位 B
工位 B
工位 A
工位 A
双工位操作
双工位 + 变位机操作
➢ 机器人外部轴的运动控制,只能在关节坐标系下进行。
返回
提示
目录
23/34
3.4 手动移动机器人
工业机器人原点坐标系设置

工业机器人原点坐标系设置
作者:csuzhm2009-04-05 11:14 星期日晴
工业机器人必须要设置原点(基准坐标系),六轴的工业机械手一般要设置六个原点坐标系.通过原点坐标系设置过程,使六个关节的实际坐标系与设计(算法)坐标系的原点重合,这样才能保证高精度的准确定位.例如,某个关节的理想转角位置是30度(相对于设计或算法建立的坐标系),但由于原点坐标系设置的误差,得到的实际转角位置可能只有29度,或者31度等,根据这个实际角度去求空间位置坐标,可能会与理想角度得到的理想位置相差好几毫米(mm),甚至更大.机器人的装配得再怎么精确,如果原点坐标系设置得不准确,机器人还是精度不高了.
原点位置设置不准确,通常会出现机器人可能有很高的重复定位精度,但是却没有位置精度.
一般购买回来的机器人的原点坐标系是设置好的,但有时候机器人在运行过程中出现编码器错误,或者更换保存编码器数据的电池等,使得编码器原点数据丢失或无效,在这种情况下都需要重新进行原点坐标系设置了.
原点坐标系设置的方法有很多种,下面介绍几种搜集来的方法.
一.Jig Method(定位销孔方法)
二.ABS Origin Method(ABS标志对齐法)。
工业机器人的五个坐标系

整理:机械580 2017-9-15
1.关节坐标系 2.直角坐标系 3.世界坐标系 4.工业机器人关节中的坐标系。 关节坐标系中工业机器人的位置和姿态,以各关 节底座侧的关节坐标系为基准而确定。 J1:0° J2:0° J3:0° J4:0° J5:0° J6:0°
这是用来定义工具中心点(TCP)的位置和工具 姿态的坐标系。工具坐标系必须事先进行设定。 在没有定义的时候,将由默认工具坐标系来替代 该坐标系。
这是用户对每个作业空间进行定义的直角坐标系。 它用于位置寄存器的示教和执行、位置补偿指令 的执行等。在没有定义的时候,将由世界坐标系 来替代该坐标系。
直角坐标系中的工业机器人的位置和姿态,通过 从空间上的直角坐标系原点到工具侧的直角坐标 系原点(工具中心点)的坐标值x、y、z和空间 上的直角坐标系的相对X轴、Y轴、Z轴周围的工 具侧的直角坐标系的回转角w、p、r予以定义。
世界坐标系是被固定在空间上的标准直角坐标系, 其被固定在由工业机器人事先确定的位置。用户 坐标系是基于该坐标系而设定的。它用于位置数 据的示教和执行。有关各工业机器人(R系列 /M系列/ARC Mate/LR Mate)的世界坐标系 原点位置的大致标准为: ① 顶吊安装工业机器人、M-710iC以外:在J1轴 上水平移动J2轴而交叉的位置。 ② 顶吊安装工业机器人、M-710iC:J1轴处于0 位时,离开J4轴最近的J1轴上的点。
工业机器人运动轴与坐标系
为了实现上述两种情况下工具的快速姿态调整,工业机器人提供了工具坐标系。 结论:建立工具坐标系的作用: (1)确定工具的TCP点(即工具中心点),方便调整工具姿态。 (2)确定工具进给方向,方便工具位置调整。
5.3 工具坐标系
5.3.2. 工具坐标系特点
新的工具坐标系是相对于默认的工具坐标系变化得到的,新的工具坐标系的位置和 方向始终同法兰盘保持绝对的位置和姿态关系,但在空间上是一直变化的。 (1)图 5-12(a)为垂直于法兰盘的垂直卡爪,TCP为机械工具坐标系平移即可,无 角度变化。 (2)图 5-12(b)为带弧形的工具,其TCP由机械工具坐标系平移或旋转获得。两种 形式的TCP均与机械工具坐标系之间存在绝对位姿关系。
5.3 工具坐标系
为了分析工具坐标系在工业机器人使用过程中的作用,进行如下探索: 探索1:研究对象和参考对象
运动学中,在研究物体运动过程时,需要选定参考对象和研究对象 思考:机器人在实际应用过程中做些什么?图 5-7所示的三种典型工业机器人应用中 的参考对象和研究对象又会是什么?
(a)弧焊
(b)点焊 图 5-7 工业机器人的典型应用案例
5.2 坐标系
5.2.4. 工具坐标系
(5)工具坐标系,由工具中心点的位置(x,y,z)和姿势(w,p,r)构成。 TCP的位置, 通过相对机械接口坐标系的工具中心点的坐标值 x、y、z 来定义,如图 5-6所示。工具 的姿势,通过机械接口坐标系的 X 轴、Y 轴、Z 轴周围的回转角 w、p、r 来定义。工 具中心点用来对位置数据的位置进行示教。在进行工具的姿势控制时,需要用上工具 姿势。
5.3 工具坐标系
5.3.3. 工具坐标系的标定
六轴机械臂工具点在固定坐标系中的表示

一、概述六轴机械臂是一种广泛应用于工业生产领域的自动化设备。
其工具点在固定坐标系中的表示是机械臂运动学中的重要概念,对于实现精准的目标定位和路径规划具有重要意义。
本文将介绍六轴机械臂工具点在固定坐标系中的表示方法,包括工具末端点的表示、工具点坐标系的建立以及工具点坐标的转换等内容。
二、工具末端点的表示1. 工具末端点是机械臂末端执行器的最终位置,通常用笛卡尔坐标系表示。
笛卡尔坐标系以机械臂基座为原点,其三个坐标轴分别与机械臂的运动轴对应。
工具末端点的位置可以通过正运动学计算得出,也可以通过传感器实时测量得到。
2. 除了位置信息外,工具末端点的姿态信息也十分重要。
通常使用欧拉角或四元数来表示工具末端点的姿态,以描述其绕基座坐标系的旋转。
三、工具点坐标系的建立1. 在机械臂运动学中,为了方便描述和计算工具末端点的位置和姿态,通常会引入工具点坐标系。
工具点坐标系是一个相对于机械臂末端执行器固连的局部坐标系,其原点位于工具末端点的位置,坐标轴与工具末端执行器的运动轴一一对应。
2. 为了确定工具点坐标系的方向,可以采用DH参数、欧拉角或其他描述方法进行建立。
在坐标系建立完成后,可以通过逆运动学得到工具点坐标系相对于固定坐标系的变换矩阵。
四、工具点坐标的转换1. 为了完成工具末端点位置和姿态的规划和控制,需要将工具点坐标系中的位置和姿态信息转换到固定坐标系中。
根据坐标变换的原理,可以利用变换矩阵来实现工具点坐标到固定坐标系的转换。
2. 另外,当需要在固定坐标系中规划目标位置和姿态时,也需要将目标位置和姿态信息转换到工具点坐标系中。
这一过程也需要利用坐标变换的原理,通过变换矩阵实现坐标的转换。
五、结论六轴机械臂工具点在固定坐标系中的表示是机械臂运动学中的重要内容。
通过对工具末端点的表示、工具点坐标系的建立以及工具点坐标的转换等内容的介绍和探讨,可以更好地理解六轴机械臂的运动规律和控制方法,为工业生产中的自动化设备应用提供技术支持。
2.3.1 工业机器人的坐标系

O
Y
X
二、基坐标系:
基坐标系是机器人其它坐标系的参照基础,是 机器人示教与编程时经常使用的坐标系之一,它的 原点位置没有硬性的规定,一般定义在机器人安装 面与第一转动轴的交点处。
右手定则: X轴:机器人机械零点
时,由基座指向机械手抓 TCP的水平方向。
Z轴:机器人机械零点 时,由基座指向机械手抓 TCP的垂直方向。
需要注意的是,以上讲解是一般机器人坐 标的定义,但不同品牌的不同的机器人型号, 可能采用不同的坐标定义,在使用机器人前, 一定要熟悉机器人坐标的正方向。
我们看一下ABB机器人的坐标截图:
很显然,在ABB机器人中没有关节坐标,却 多出一个大地坐标,这又是为什么呢?
那是因为我们使用的是外国的机器人,机 器人的定义在世界都没有完全的分界线,何况 一个坐标,肯定也会出现命名的不同,而且翻 译也不见得准确。
我们看一下英文版的:
我们看英文单词,可能还会翻译成世界坐 标。同样,还有把基坐标称为机械坐标的。
我们简单的看看这几个坐标: Nhomakorabea节坐标 基坐标 工具坐标 工件坐标 大地坐标 机械坐标 世界坐标
捏柿子
1、判断图中各轴的正 方向:
J1: J2: J3: J4: J5: J6:
捏柿子
2、说出下列坐标的名称
2、横向关节:ABB的, 末端执行器落下即为关节坐 标正方向。
四、工件坐标系:
工件坐标系是用户 自定义的坐标系,用户 坐标系也可以定义为工 件坐标系,可根据需要 定义多个工件坐标系, 当配备多个工作台时, 选择工件坐标系操作更 为简单。
五、工具坐标系:
工具坐标系是原点安装 在机器人末端的工具中心点 (TCP:Tool Center Point) 处的坐标系,原点及方向都 是随着末端位置与角度不断 变化的,该坐标系实际是将 基坐标系通过旋转及位移变 化而来的。工具坐标系也是 用户自定义的坐标系。
一文读懂:工业六轴机器人D-H模型及运动学建模

第1页第一章 D-H 模型1.1 XX 机器人D-H 变换z4图1- 1 XX 机器人模型建立上述坐标系以后,坐标系i 关于坐标系1i -的位置和方向就完全由下列参数给定:a :(相邻两个Z 轴之间的垂直的距离,即连杆的长度。
)d :(相邻两个X 轴之间的垂直距离,即相连坐标系原点间的距离。
) α:(相邻两个Z 轴之间的夹角。
)θ:(相邻两个X 轴之间的夹角。
) 接下来进行相邻坐标系之间的坐标变换,运动顺序按照:1、将坐标系沿着轴1i Z -平移i d ,再绕着轴1i Z -旋转i θ,用齐次坐标变换描述:1'cos sin 00sin cos 00001001i i i i i i i A d θθθθ--⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦2、通过中间坐标系沿着轴'i X 平移i a ,并且绕着轴'i X 旋转i α,用齐次坐标变换描述为:1'1000cos sin 00sin cos 001i i i i i i i a A αααα-⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦3、坐标变换通过右乘得到:1cos cos sin sin sin cos sin cos cos cos sin sin 0sin cos 01i i i i i i i i i i i i i i i i i i ia a A d θαθθαθθθαθαθαα--⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦表1- 1 巨轮机器人的DH 参数表θ daα0-1 1θ1d 1a 1α 1-2 2θ 2d2a2α2-3 3θ3d 3a 3α 3-4 4θ 4d 4a 4α 4-5 5θ5d5a5α5-66θ 6d 6a 6α第3页1.2 旋转变换1、参考坐标系绕Z 轴旋转θ角的旋转矩阵为:cos sin 0sin cos 001Z R θθθθθ-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦2、参考坐标系绕X 轴旋转α角的旋转矩阵为:1000cos sin 0sin cos x R ααααα⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦ 得到关于两轴的旋转变换:R = [ cos(theta), -cos(alpha)*sin(theta), sin(alpha)*sin(theta)] [ sin(theta), cos(alpha)*cos(theta), -sin(alpha)*cos(theta)] [ 0, sin(alpha), cos(alpha)]1.3 正运动学变换0012345123456n T A A A A A A =1.4 逆运动学变换逆运动学是已知末端连杆的位置和方向,求机器人各个关节变量。
解密:工业机器人四大坐标系,小白可以进来学习

解密:工业机器人四大坐标系,小白可以进来学习
机器人坐标系的种类
定义:机器人分为机器人本体轴和外部轴。
外部轴又分为滑台和上位机等。
如无特别说明,机器人轴即指机器人本体的运动轴。
对机器人进行轴操作时,可以使用以下几种坐标系(各牌子机器人叫法不一致):
一、关节坐标系
机器人各轴进行单独动作,称关节坐标系。
二.直角坐标系
直角坐标系的原点定义在机器人轴轴线上,是与2轴所在水平面的交点。
直角坐标系的方向规定:X轴方向向前,Z轴方向向上,Y轴根据右手定则确定。
不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动。
三.工具坐标系
工具坐标系把机器人腕部法兰盘所持工具的有效方向作为Z 轴,并把坐标定义在工具的尖端点。
四.用户坐标系
在机器人动作允许范围内的任意位置,设定任意角度的X、Y、Z 轴,用户坐标系一般定义在工件,方向由用户自己定义.
以下是用户坐标的使用范例。
工业机器人常用坐标系你知道多少?
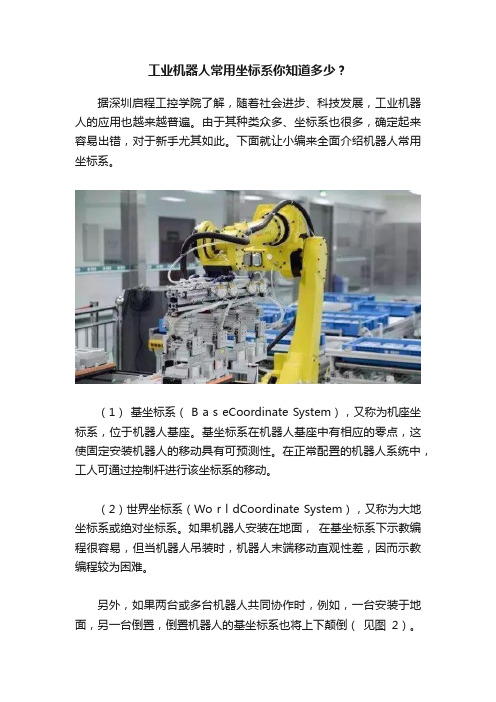
工业机器人常用坐标系你知道多少?据深圳启程工控学院了解,随着社会进步、科技发展,工业机器人的应用也越来越普遍。
由于其种类众多、坐标系也很多,确定起来容易出错,对于新手尤其如此。
下面就让小编来全面介绍机器人常用坐标系。
(1)基坐标系( B a s eCoordinate System),又称为机座坐标系,位于机器人基座。
基坐标系在机器人基座中有相应的零点,这使固定安装机器人的移动具有可预测性。
在正常配置的机器人系统中,工人可通过控制杆进行该坐标系的移动。
(2)世界坐标系(Wo r l dCoordinate System),又称为大地坐标系或绝对坐标系。
如果机器人安装在地面,在基坐标系下示教编程很容易,但当机器人吊装时,机器人末端移动直观性差,因而示教编程较为困难。
另外,如果两台或多台机器人共同协作时,例如,一台安装于地面,另一台倒置,倒置机器人的基坐标系也将上下颠倒(见图2)。
当分别在两台机器人的基坐标系A 、B 中进行运动控制时,很难预测相互协作运动的情况。
图2 世界坐标系此时,可以定义一个共同的世界坐标系C 取而代之。
若无特殊说明,单台机器人世界坐标系和基坐标系是重合的。
(3)用户坐标系(U s e rCoordinate System),机器人可以和不同的工作台或夹具配合工作,在每个工作台上建立一个用户坐标系。
机器人大部分采用示教编程的方式,步骤繁琐,对于相同工件,若放置在不同工作台进行操作,不必重新编程,只需相应地变换到当前用户坐标系下。
用户坐标系在基坐标系或者世界坐标系下建立。
(4)工件坐标系(Obje c tCoordinate System)与工件相关,通常最适于对机器人进行编图2 世界坐标系程。
工件坐标系对应工件,它定义工件相对于大地坐标系(或其他坐标系)的位置。
据深圳启程工控学院了解,工件坐标系拥有特定附加属性,主要用于简化编程。
他拥有两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关)。
爱普生工业机器人EPSON 6轴机器人

点数据是由机器人坐标系为基准的工具坐标系 中心位置及姿势所表示的,即位置用位置数据 (X、Y、Z),姿势用姿势数据(U、V、W)指 定: P100=XY(X,Y,Z,U,V,W) U:绕Z轴旋转 V:绕Y轴旋转
W:绕X轴旋转
在调试点位时,默认模式下以机器人坐标系为 准;工具模式下以工具坐标系为准。
AvoidSingularity(Move,Arc)自动回避特别姿势功能
AvoidSingularity=1
6轴机器人工具坐标系向导设置步骤
U = 0, V = 0, W = 180
旋转U轴一些角度(一般180度) U = 0, V = 0, W = 180。旋转W一些角度,同时保持U和 V=0。
Jump3 Here :Z(100), P0 :Z(100), P0
Jump3 Here -TLZ(100), P0 -TLZ(100), P0
Jump3 Here +Z(100), P0 +Z(100), P0
Go p0 Move p0
Go XY(x0,y0,z,u,v,w)/R /A /NF /J6F0 /J4F0 /0 如果点位是自定义的,例如由视觉像素坐标转换而来,则需要指定 各个姿势的标志。一般可以先手动到目标点位置记录下各个标志,然后再 加到后面。 AutoLJM(Jump3,Go,Move,Arc)最小的动作关节移动量 Go P0 LJM
EPSON 6轴机械手培训
6轴机器人坐标系
1.机器人基本坐标系:以J1 法兰中心为原点, XYZ正方向如下图(右手 定则); 2.工具0坐标系:以J6法兰 中心为原点, XYZ正方向如下图,(右 手定则)。
机器人坐标系一般是固定不变的
工业机器人的五个坐标系
工业机器人的五个坐标系在工业机器人领域,坐标系是用来描述机器人末端执行器(或工具)在空间中的位置和姿态的框架。
为了确保机器人的准确性和一致性,通常会使用一系列标准的坐标系。
以下是工业机器人领域中最常用的五个坐标系:1、笛卡尔坐标系:在三维空间中,笛卡尔坐标系使用三个相互垂直的坐标轴(X、Y、Z),以及三个相互垂直的旋转轴(Rx、Ry、Rz)。
这种坐标系常用于描述机器人在空间中的位置和姿态,以及机器人末端执行器的位置和姿态。
2、极坐标系:极坐标系是一种以机器人末端执行器为中心的坐标系,它使用径向距离(r)、方位角(θ)和高度(z)来描述机器人在空间中的位置和姿态。
这种坐标系常用于路径规划、路径插补和机器人运动学分析。
3、圆柱坐标系:圆柱坐标系是一种以机器人末端执行器为中心的坐标系,它使用径向距离(r)、方位角(θ)和垂直距离(z)来描述机器人在空间中的位置和姿态。
这种坐标系常用于描述机器人在圆柱体或球体等形状上的路径和姿态。
4、球坐标系:球坐标系是一种以机器人末端执行器为中心的坐标系,它使用径向距离(r)、方位角(θ)和极角(φ)来描述机器人在空间中的位置和姿态。
这种坐标系常用于描述机器人在球体或类似形状上的路径和姿态。
5、工具坐标系:工具坐标系是一种以机器人末端执行器(或工具)为中心的坐标系,它使用工具的几何中心作为原点,并使用三个旋转轴(Rx、Ry、Rz)来描述工具的空间姿态。
这种坐标系常用于机器人运动学建模、路径规划和机器人控制等方面。
这些坐标系在工业机器人领域中具有广泛的应用,它们为机器人控制、路径规划和运动学建模提供了方便的框架。
根据实际应用场景的不同,选择合适的坐标系可以有效地提高机器人的精度和效率。
ABB工业机器人操作和坐标系一、引言在现代化的制造和自动化流程中,工业机器人扮演着关键的角色。
它们被广泛应用于各种复杂任务,从装配到质量检测,从搬运到喷漆,无所不能。
ABB集团作为全球领先的机器人技术提供商,其产品广泛应用于全球的各个行业。
工业机器人操作基础-工业机器人轴和坐标系概述
工业机器人操作基础-工业机器人轴和坐标系概述
继上一阶段我们学习了《工业机器人编程》之后,本阶段我们来介绍《工业机器人操作基础》,因为现在工业机器人厂家众多,不能都一一介绍,本次主要以国产新松机器人(六轴)作为分析和介绍对象来进行说明,第一章我先介绍《工业机器人轴和坐标系概述》:
一、工业机器人轴的定义
1、工业机器人轴可以为旋转轴也可以为平移轴,轴的运行方式由机械结构决定。
2、工业机器人轴分为机器人本体的运动轴和外部轴。
3、工业机器人外部轴又分为滑台和变位机。
4、如果不特别指明,工业机器人轴即指机器人本体的运动轴。
关节坐标系示意图
二、机器人坐标系的种类
在示教模式下,机器人轴运动方向与当前选择的坐标系有关。
新松机器人支持4 种坐标系:关节坐标系、直角坐标系、工具坐标系、用户坐标系。
1、关节坐标系:机器人各轴进行单独动作,称为关节坐标系。
2、直角坐标系:机器人的控制中心点沿设定的X、Y、Z 方向运行。
3、工具坐标系:工具坐标系位于机器人腕法兰盘的夹具上,由用户自己定义。
夹具的有效方向定义为工具坐标系的Z 轴。
4、用户坐标系:用户坐标系位于机器人抓取的工件上,由用户自己定义。
三、工业机器人参考示意图:
本章结束到此结束,下一章我们将介绍《工业机器人关节坐标系》,敬请期待!同时我们将会把这些内容整理成电子书《工业机器人操作基础》需要的朋友可以联系我,我免费发送给大家。
直角坐标机器人

直角坐标机器人直角坐标机器人是一种能够在直角坐标系中进行自主运动和定位的机器人。
它具有独特的设计和功能,可以广泛应用于各个领域,如工业生产、仓储物流、医疗服务等。
本文将介绍直角坐标机器人的工作原理、应用场景以及未来前景。
工作原理直角坐标机器人采用了直角坐标系作为其运动和定位的基准。
它通常由一个底座和一个横纵向可移动的工作平台组成。
工作平台上安装有各种传感器和执行器,以实现机器人的感知和动作功能。
机器人通过底座上的电机驱动工作平台在直角坐标系内进行水平和垂直方向的运动。
通过准确的定位和运动规划,直角坐标机器人可以在三个坐标轴上精确定位和移动,实现复杂的任务。
机器人的工作原理基于先进的控制算法和传感器技术。
通过实时感知周围环境和自身状态,机器人可以做出相应的决策,并且能够适应不同的工作场景和需求。
应用场景直角坐标机器人在许多领域中都有广泛的应用。
以下是一些常见的应用场景:1.工业生产:直角坐标机器人可以用于自动化生产线,执行装配、搬运、喷涂等任务。
其高精度和重复性能保证了生产线的效率和质量。
2.仓储物流:机器人可以在仓库中进行货物的搬运和堆放,提高物流效率和准确性。
通过与仓库管理系统的联动,机器人可以实现自动的货物分拣和库存管理。
3.医疗服务:直角坐标机器人可以在医院中执行手术室和病房的物品搬运和定位任务。
它们可以精确地将物品传送到指定位置,减轻医护人员的劳动强度。
4.基础设施维护:机器人可以用于检查和维护高空、狭窄或危险的地方,如桥梁、管道等。
它们可以代替人工进行巡检和维修工作,提高安全性和效率。
未来前景直角坐标机器人在未来将有更广阔的应用前景。
随着人工智能、物联网和自动化技术的不断进步,机器人将更加智能化、灵活化和自主化。
未来的直角坐标机器人将具备更强大的计算和感知能力,在复杂环境中自主决策和执行任务。
它们可能与其他机器人或智能设备实现协作,形成集群或团队,共同完成任务。
直角坐标机器人还有望应用于更多领域,如家庭服务、教育培训、农业等。
六轴机器人直角坐标系建立_收藏工业机器人4大坐标系详解

六轴机器⼈直⾓坐标系建⽴_收藏⼯业机器⼈4⼤坐标系详解机器⼈的坐标系,你知道多少 ?真的会使⽤坐标系吗?下⾯我来带你来剖析机器⼈的坐标系吧!(以ABB机器⼈举例说明)
1. 基坐标系
基坐标系是以机器⼈安装基座为基
准、⽤来描述机器⼈本体运动的直⾓坐标系。
任何机器⼈都离不开基坐标系,也是机器⼈TCP在三维空间运动空间所必须的基本坐标系(⾯对机器⼈前后:X轴 ,左右:Y轴, 上下:Z 轴)。
坐标系遵守右⼿准则:
2. ⼤地坐标系
⼤地坐标系:⼤地坐标系是以⼤地作为参考的直⾓坐标系。
在多个机器⼈联动的和带有外轴的机器⼈会⽤到,90%的⼤地坐标系与基坐标系是重合的。
但是在以下两种情况⼤地坐标系与基坐标系不重合:
(1)机器⼈倒装。
如图1-0,倒装机器⼈的基坐标与⼤地坐标Z轴的⽅向是相反,机器⼈可以倒过来,但是⼤地却不可以倒过来。
(2)带外部轴的机器⼈。
如图1-1,⼤地坐标系固定好位置,⽽基坐标系却可以随着机器⼈整体的移动⽽移动。
3. ⼯具坐标系
⼯具坐标系:是以⼯具中⼼点作为零点,机器⼈的轨迹参照⼯具中⼼点,不再是机器⼈⼿腕中⼼点Tool0(如图1-2)了,⽽是新的⼯具中⼼
点(如图1-3)。
例如:焊接的时候,我们所使⽤的⼯具是焊枪,所以可把⼯具坐标移植为焊枪的顶点。
⽽⽤吸盘吸⼯件时使⽤的是吸盘,所以我们可以把⼯具坐标移植为吸盘的表⾯(如图1-5)。
4. ⼯件坐标系
⼯件坐标系:⼯件坐标系是以⼯件为基准的直⾓坐标系,可⽤来描述TCP运动的坐标系。
例如:机器⼈加⼯⼯件1,轨迹编程已经编好,另外有⼯件2,轨迹不需要重复编程只要把⼯件坐标系1改为⼯件坐标系2即可。
工业机器人的工具坐标系、工件坐标系、世界坐标系标定
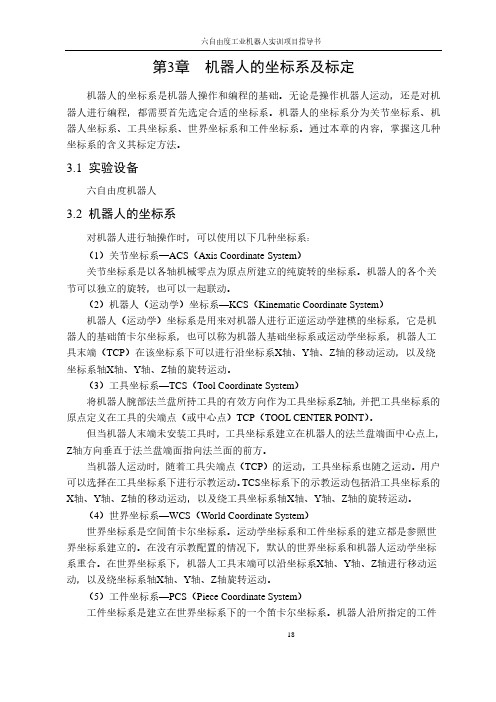
第3章 机器人的坐标系及标定
机器人的坐标系是机器人操作和编程的基础。无论是操作机器人运动,还是对机 器人进行编程,都需要首先选定合适的坐标系。机器人的坐标系分为关节坐标系、机 器人坐标系、工具坐标系、世界坐标系和工件坐标系。通过本章的内容,掌握这几种 坐标系的含义其标定方法。
18
坐标系各轴平移或旋转。
六自由度工业机器人实训项目指导书
图 3-1 机器人的坐标系示意图
3.3 实验项目 1—运动学坐标系下的运动
3.3.1 实验目的 掌握机器人在运动学坐标系下运动的操作方法。
3.3.1 实验内容 坐标系设定为机器人 KCS 时,机器人工具末端 TCP 沿 KCS 坐标系的 X、Y、Z 轴
沿 WCS 坐标系 X 轴平移运动
沿 WCS 坐标系 Y 轴平移运动 沿 WCS 坐标系 Z 轴平移运动
20
六自由度工业机器人实训项目指导书
绕X 轴
绕WCS 坐标的X 轴旋转运动
绕Y 轴 旋转轴
绕WCS 坐标的Y 轴旋转运动
绕Z 轴
绕WCS 坐标的Z 轴旋转运动
若同时按下两个以上轴操作键时,机器人按合成动作运动。如果同轴反方向两键 同时按下,轴不动作,如[X-]+[X+]。 3.4.3 世界坐标系的标定
参照世界坐标系的标定方法,标定一个世界坐标系,并操作机器人在该坐标系下 运动。
(1)世界坐标系 WCS 标定管理主界面如图 3-2 所示,用户可通过菜单{机器人} 下的子菜单{坐标系管理}来进入该标定管理界面,也可以通过主界面上的{工具}按钮快 捷进入坐标系标定管理界面。
图 3-2 世界坐标系 WCS 管理界面
图 3-12 示教点管理界面(伺服使能)
rps坐标系、直角坐标系、基础坐标系、笛卡尔坐标系、p6坐标系

rps坐标系、直角坐标系、基础坐标系、笛卡尔坐标系、p6坐标系介绍如下:
1.RPS坐标系:旋转、位置、缩放(RPS)坐标系是一种机器人学
中常用的描述方法,用于描述机器人的关节运动和末端执行器的位置。
其中,R代表旋转,P代表位置,S代表缩放。
2.直角坐标系:在几何学中,直角坐标系是一个有原点、正方向
和单位长度的坐标系,常用于描述二维或三维空间中的点。
3.基础坐标系:在机器人学中,基础坐标系是机器人的基准坐标
系,用于描述机器人的初始状态和位置。
它通常固定在机器人基座或机器人的基础部位上。
4.笛卡尔坐标系:笛卡尔坐标系是一种基于直角坐标的坐标系,
通过三个相互垂直的平面和三个相互垂直的轴来描述空间中的点。
在二维空间中,它由x轴、y轴和z轴组成;在三维空间中,它由x轴、y轴、z轴和垂直于这些轴的平面组成。
5.P6坐标系:P6坐标系是一种六自由度机器人学中的描述方法,
用于描述机器人的关节运动和末端执行器的位置。
其中,P代表平移,6个自由度分别为沿x、y、z轴的平移和绕x、y、z轴的旋转。
这些坐标系都是用于描述空间中的点和物体的位置、方向和姿态的数学工具,它们在不同的应用领域中具有不同的用途和特点。
基于高精密控制的六轴机器人坐标转换算法
L (x -x - z -z ) x z 1 =丿 1 0)2+(y| y0)2+( 1 0 2 =J 1+y1+ : (1)
式中:(X0 ,y0 ,z0)、(x| ,y| ,z| )分别为肩关节回转控制点坐
标和肘关节回转控制点坐标,且(X0,y0,Z0)= (0,0,0)。
设腕关节回转控制点坐标为(X2, y2, <2),那么L2即
almost along the shortest straight line in space. The results show that the new control system is much more efficient than that of the robots of its own and has positive significance for the autonomous control of six axis robot.
coordinate system to three-dimensional right angle marking,the machine learning algorithm was introduced into the six axis robot control as the core idea, and the six axis robot' s own control system was innovated through the multi column neural network control
Keywords: six axis robot ; spherical superposition coordinate system ; three-dimensional rectangular coordi nate system; coordi nate
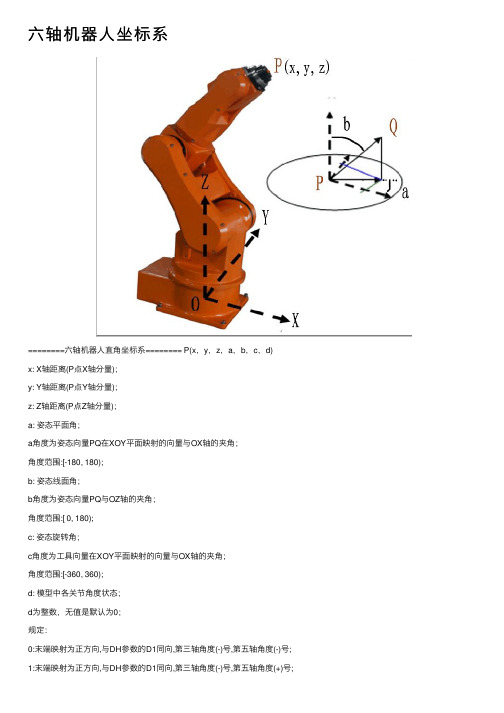
六轴机器人坐标系
六轴机器⼈坐标系
========六轴机器⼈直⾓坐标系======== P(x,y,z,a,b,c,d)
x: X轴距离(P点X轴分量);
y: Y轴距离(P点Y轴分量);
z: Z轴距离(P点Z轴分量);
a: 姿态平⾯⾓;
a⾓度为姿态向量PQ在XOY平⾯映射的向量与OX轴的夹⾓;
⾓度范围:[-180, 180);
b: 姿态线⾯⾓;
b⾓度为姿态向量PQ与OZ轴的夹⾓;
⾓度范围:[ 0, 180);
c: 姿态旋转⾓;
c⾓度为⼯具向量在XOY平⾯映射的向量与OX轴的夹⾓;
⾓度范围:[-360, 360);
d: 模型中各关节⾓度状态;
d为整数,⽆值是默认为0;
规定:
0:末端映射为正⽅向,与DH参数的D1同向,第三轴⾓度(-)号,第五轴⾓度(-)号; 1:末端映射为正⽅向,与DH参数的D1同向,第三轴⾓度(-)号,第五轴⾓度(+)号;
2:末端映射为正⽅向,与DH参数的D1同向,第三轴⾓度(+)号,第五轴⾓度(-)号; 3:末端映射为正⽅向,与DH参数的D1同向,第三轴⾓度(+)号,第五轴⾓度(+)号; 4:末端映射为负⽅向,与DH参数的D1逆向,第三轴⾓度(-)号,第五轴⾓度(-)号; 5:末端映射为负⽅向,与DH参数的D1逆向,第三轴⾓度(-)号,第五轴⾓度(+)号; 6:末端映射为负⽅向,与DH参数的D1逆向,第三轴⾓度(+)号,第五轴⾓度(-)号; 7:末端映射为负⽅向,与DH参数的D1逆向,第三轴⾓度(+)号,第五轴⾓度(+)号;。