毕业设计:模糊控制器的仿真研究
模糊PID温度控制毕业设计
模糊PID温度控制毕业设计第一章绪论1.1选题背景及其意义在工业生产过程中,控制对象各种各样,温度是生产过程和科学实验中普遍而且重要的物理参数之一。
在生产过程中,为了高效地进行生产,必须对它的主要参数,如温度、压力、流量等进行有效的控制。
温度控制在生产过程中占有相当大的比例,其关键在于测温和控温两方面。
温度测量是温度控制的基础,技术已经比较成熟。
由于控制对象越来越复杂,在温度控制方面,还存在着许多问题。
如何更好地提高控制性能,满足不同系统的控制要求,是目前科学研究领域的一个重要课题。
温度控制一般指对某一特定空间的温度进行控制调节,使其达到工艺过程的要求。
本文主要研究电锅炉温度控制的方法。
电锅炉是将电能转换为热能的能量转换装置[1]。
具有结构简单、无污染、自动化程度高等特点。
与传统的以煤和石化产品为燃料的锅炉相比还具有基本投资少、占地面积小、操作方便、热效率高、能量转化率高等优点。
近年来,电锅炉已成为供热采暖的主要设备。
锅炉控制作为过程控制的一个典型,动态特性具有大惯性大延迟的特点,而且伴有非线性。
目前国电热锅炉控制大都采用的是开关式控制,甚至是人工控制方法。
采用这些控制方法的系统稳定性不好,超调量大,同时对外界环境变化响应慢,实时性差。
另外,频繁的开关切换对电网产生很大的冲击,降低了系统的经济效益,减少了锅炉的使WORD版本.用年限。
因此,研究一种最佳的电锅炉控制方法,对提高系统的经济性,稳定性具有重要的意义。
1.2工业控制的发展概况工业控制的形成和发展在理论上经历了三个阶段50年代末起到70年代为第一阶段,即经典控制理论阶段,这期间既是经典控制理论应用发展的鼎盛时期,又是现代控制理论应用和发展时期;70年代至90年代为第二阶段,即现代控制理论阶段;90年代至今为第三阶段,即智能控制理论阶段[2]第一阶段:初级阶段。
它以经典控制理论为主要控制方案,采用常规气动、液动和电动仪表,对生产过程中的温度、流量、压力和液位进行控制。
电气电子毕业设计365模糊自适应控制研究
摘要PID控制由于其算法简单、鲁棒性好及可靠性高,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性系统。
然而实际工业生产过程往往具有非线性、时变不确定性,难以建立精确的数学模型,应用常规PID控制器不能达到理想的控制效果。
为了克服传统PID控制的弱点,控制界已经提出了大量的对PID控制的改进方案。
但这些方案一般是针对某些具体问题,缺乏通用性,附加的结构或算法也增加了控制器的复杂性,使它们的广泛应用受到限制将模糊决策理论与常规PID控制技术结合,研制出模糊自适应PID 控制器,并利用VB的ActiveX技术创建了模糊自适应PID控件,将该空间嵌入组态软件中进行实时控制,结果表明该控制策略具有较强的鲁棒性和适应性。
针对实际工业过程控制的难点,借鉴生物免疫系统中的免疫反馈原理,结合模糊控制可以逼近非线性函数的特点,分析了积分系数在系统响应过程中的非线性变化规律,提出了一种模糊免疫非线性PID控制方法。
这种方法具有量小,调整时间短,抗干扰能力和鲁棒性强等优点,理论分析和仿真研究证明了该方法的可行性和有效性。
关键词:自适应,模糊控制,PID控制,模糊免疫非线性PID控制Adaptive Fuzzy Control ResearchABSTRACTPID control is widely used in motion control and process control because of its simple algorithm, good robust and reliability, particularly applicable to the certain systems of establish a precise mathematical model. Nevertheless, the actual production process are often nonlinear, uncertain time-varying, it is difficult to establish a precise mathematical model, the conventional PID control can not achieve the desired effect.To overcome the weaknesses of traditional PID control, a lot of improve projects of the PID control have been put forward in the control industry. However, these projects are generally targeted at certain specific issues, the lack of universality. Additional structural or algorithm increased the complexity of the controller,restrict their wide use.This paper puts forward a technology which combinate the fuzzy decision theory and conventional PID control, researches and makes out a adaptive fuzzy PID controller (AFPID), by use of ActiveX of VB create a ActiveXof AFPID, embeds this ActiveX into configuration software to real-time control, the result shows this control tactic has stronger robust and adaptivity.A fuzzy immune nonlinear PID control method is presented in order to solve the difficulties of actual industry process control. This method is based on the immune feedback principle in the biological immune system, the approaching ability for nonlinear function of fuzzy controller and the nonlinear change law of the integral gain in the response process of the system. This method has low overshoot, short regulate time, strong anti-disturbance ability and great robustness. The theoretical analysis and simulation results show the feasibility and effectiveness of this method.Key words:self-adaption,fuzzy control,PID control,fuzzy immune nonlinear PID control模糊自适应控制研究0 引言自从L.A.Zadeh提出模糊集合论以来,基于该理论形成一门新的模糊系统理论学科,在控制、信号处理、模式识别、通信等领域得到了广泛的应用。
异步电动机软起动的模糊控制器的仿真研究

【 e od ]snhoos o rSf s rn ;uz cn o; A L B/I U IK K yw rsAycr u m t ;o-t tgFz otlM T A SM LN n o t ai y r
0 引 言
异步 电动机 因其 结构简单 、 能优异 、 护方便等优点 在各种工 性 维 业场合得到广泛应用 异步电动机在全压起 动时. 起动 电流较大 f 可达 额定 电流 4 7 . 倍 某些 笼型异步 电动机甚至可达 8 1 倍 )在电 网容 ~2 .
量有 限的场 合 . 的起 动 电流会使 线路压 降增 大 . 电网电压显 过大 造成
著下降而影响正常工作 : 同时 , 过大 的起动 电流会 造成 电动机发热 , 从 而影响 电动机 的寿命 为有效 控制起动 电流和冲击 . 软启动 以其控 制方便 、 可反馈 闭环 控制 、 平滑性较好等优点能实现 比较平稳的起动 。 现今在 各个领域 中被 逐渐采用 的模糊控制 .是 运用近似推 理手 段。 实现系统控制 的一种方法。 由于模糊控制 以其单个规则的独特性 , 减小 由于个别规则的响应误差对全局的影响程度 . 使整个 控制系统 的 鲁棒性增强 本文借 助于 M T A A L B软件 的动态仿真工具 Sm l k i u n 来 i 构 建异 步电动机软起 动控制系统的仿真模型并进行 了仿真 , 建模 过程 简洁直观 .仿 真过程 中通 过改变参数 可随时观察 系统 的动态变化 情
况
三相交流调压模块 中. 单相交流 电压 的调压通过把两个 晶闸管反 并联后 串联在交流 电路 中. 期性的导通两个两个晶闸管降低电压的 周 有效值 基于单 相交 流的调压在三相 电压源的每一相 串联一个首尾并 联的晶闸管 。如图 2 其 中由于晶闸管是 由于晶闸管是典型 的非线性 器件 , 在使用过程 中会 产生大量 的谐 波 . 将对设备 的稳定运行及 电网 造成不 良影响 . 在仿真 中通过修改晶闸管参数提高仿真效果
《2024年电液伺服系统模糊PID控制仿真与试验研究》范文

《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
数控伺服系统模糊PID控制仿真研究

模糊合成推理设计 出的 PD参数模糊调整矩 阵表 ,这是整定 I
系统模糊控制算法 的核心 。定义 , , 调整算式如下 : K,
() 3 算法计算量较大。 针对数控机床伺服系统 的特性 , 本文设计 了一种模糊 自校 正 PD控制器 ,其既具有模糊控制灵活性和抗干扰性强 的特 I
可取大些 , 通常取为中等大 小 ; I I 当 E 较大时 , 应取小些。 C 根据上述参数整定规则和积累的实际经验 , 以得 出 , 可
两种算法结合 , 便构成模糊整定 PD控制器 , 图 1 I 如 所示 。模
糊 推理 部分 的输入 是偏 差 E和 偏差 变 化率 E C,输 出量 是 △ , ,△ 。既保持了 PD控 制器的优点 , △ , I 又通过智能技
点, 又具有 PD控制器稳态精度 高的特点。 I 仿真结果表明 , 明显
fPKpy {,C) = P7 △ K - ' PEE P+ 。 P P - 十 + { ’ {,c) , EE ’ △K , i Io DT {,C} - △ K = ’ oEE DKD +
避 免 系统 响应 出现 较 大 的超 调 , 时应 取 较 小 的 , 。 此 值
在工业过程控 制中 ,I PD控制器 以其 结构简单 , 操作方便
而得到了广泛 的应用。但传统 PD控制器主要是针对有确切 I 模型 的线 性过程 ,其 HD参数一经确定后无法随着对象 的变
化 而 调整 。
图 1 模 糊 一 I 制 方 法 PD控
由 E, C及 , , 的模糊子集 的隶属度 ,再根据各模 E 糊子集 的隶属度赋值表和各参数 的模糊调整规则模 型,运用
展 。但在实际 中仍存在 如下 问题 :
( ) 于依赖系统参数 ; 1过 () 2 控制理论在参数设计 及稳定性分析方 面不完善 ;
基于ATS—PID模糊控制器的仿真研究
THENy = k ̄ l l + k , k + 2 akJ 3;
改进 , 使参数 的调节更加简单易行 , 而且物理意义 明确。
R :FxisZO I i ANDx i ANDx i 2sN 3sN
I
是 改善控 制器局部控制性能 的调解 参数 。A S PD控制器有 T— I
1 6条控 制规 则 , 件 调 节 参 数 2 后 0个 。
12 A S P D模 糊 控 制 器 . T — I
A S PD模糊控制器初始参数 k ,fk 的设定采用著名 T— I 。 ,D 的 Zel - i o 方法进行整 定。 ig rNc l e hs 假设被控对象阶跃响应 曲线 如图 1 所示 , 输入阶跃信号的幅值为 1则 Ay为对象 的增 益 , ,
48
《 备制 造技 术)0 0年第 1 装 21 期
2 仿 真 实例
用 M fb中 的 Sm l k工 具 包 对 A S PD 模 糊 控 制 器 aa l iui n T— I
进行仿真 , 验证其控制性能的优越 性。
Kp
= ;
;
=o K T . , 5
() 4
T N  ̄ y; HE y =
() 1
当偏差 中等大小时 ,为 了使系统有较小的超调 ,比例增 益、 积分增 益就要减小 , 此时微分增益的取值很重要 。这种情 况下 ,。 的模糊子集 为 P S或 N ,, S 的模糊子集为 P或 N, 的
R”
陷 ,本文正是 出于对模糊 PD改进 的目的 ,设计 了一种基于 I
T S模 型 的模 糊 PD控制 器 ,将模 糊 控 制 与 T S模 型 相结 合 , — I _
模糊控制毕业论文

模糊控制考核论文姓名:郑鑫学号:1409814011 班级:149641 题目:模糊控制的理论与发展概述摘要模糊控制理论是以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
本文简单介绍了模糊控制的概念及应用,详细介绍了模糊控制器的设计,其中包含模糊控制系统的原理、模糊控制器的分类及其设计元素。
关键词:模糊控制;模糊控制器;现状及展望Abstract Fuzzy control theory is based on fuzzy mathematics, using language rule representation and advanced computer technology, it is a high-level control strategy which can make decision by the fuzzy reasoning. Fuzzy control is a computer numerical contro which based fuzzy set theory, fuzzy linguistic variables and fuzzy logic, it has become the effective form of intelligent control especially in the form of fuzzy control and neural networks, genetic algorithms and chaos theory and other new integration of disciplines, which is showing its great potential. Fuzzy control is essentially a nonlinear control, and subordinates intelligent control areas. A major feature of fuzzy control is both a systematic theory and a large number of the application background.This article introduces simply the concept and application of fuzzy control and introduces detailly the design of the fuzzy controller. It contains the principles of fuzzy control system, the classification of fuzzy controller and its design elements.Key words: Fuzzy Control; Fuzzy Controller; Status and Prospects.引言传统的常规PID控制方式是根据被控制对象的数学模型建立,虽然它的控制精度可以很高,但对于多变量且具有强耦合性的时变系统表现出很大的误差。
T-S新型模糊控制器在水轮发电机组调速控制中的应用与仿真1
1 引言水轮机调速系统包括引水系统、水轮机、调速器、发电机及励磁系统等几个部分,是一个集水力、机械、电气为一体的复杂的控制系统,历来受到水电界的关注和重视。
水轮机调节系统的基木任务是根据负荷的变化不断地调节水轮发电机组的有功功率输出,并维持机组转速在规定的范围内。
但由于压力引水系统的水流惯性、水轮发电机组各个环节的非线性特性、水轮机传递系数随工况而改变的时变特性以及随时发生的电力系统负荷扰动使得水轮机调节系统的控制十分困难。
随着电力系统的不断扩大以及大容量、高水头机组的出现,对水轮机调速器的性能提出了越来越高的要求,在不断改进水轮机调速器的硬件设计、加工工艺和装配工艺等基础上,进行水轮机调速器控制策略的研究,是一项十分重要的工作。
随着控制理论的发展和对控制性能要求的提高,开展过程控制系统的智能控制研究,是十分必要的。
本文在全面总结现有调节控制规律和应用成果的基础上,进行了水轮机调节系统的智能控制策略的研究。
水轮机调节系统的特点在于:一是调节系统本质上是一非最小相位系统,调节的过程中会出现反调节现象,控制系统不易稳定;二是调节系统的工况受水头和负载特性的影响,其表征控制对象传递函数的参数具有时变的性质,对调节系统的动态特性影响较大。
所以,水轮机调节系统的特点在客观上要求其控制器,即调速器具有鲁棒性。
正确选择调速器的最优调节参数,使水轮机调节系统有良好的动态品质,是保证机组安全运行及电能质量的一个重要的问题。
近年以来,随着计算机硬件水平的提高和控制理论的发展,水轮机调节规律的研究也取得了很大的进展,就如何保证和提高电力系统的安全稳定性进行了大量的研究,提出了许多有效的控制措施和方法。
传统的模拟式调速器的调节规律是PI或PID调节,而且只有空载和负荷工况两组参数,其参数一经整定,在无人干预的情况下,常被运行于整个工况。
实际上在不同工况下,对于频率给定与负荷扰动,所要求的PID最佳参数是各异的,因此,要使水轮机调节系统在所有运行工况下均具有良好的鲁棒性是十分困难的。
风力发电机组模糊控制器的设计与仿真
第l 2期
胡世忠等. 风力 发电机组模糊 控制器的设计与仿真
・ 7・ 7
所捕获 的风能可转变为机械输 出功率 P :
P = 5 A ) c( , () 1
变速 变桨风力发 电机组根据不 同的风况可分为
三个不 同的运行 阶段 : 第一 阶段是起动阶段 , 发电机 转速从静止上升 到切 入速 度 ; 第二 阶段是 风力发 电 机组切入 电网后运行 在额定 风速 下 的区域 , 它又 分 为变速运行 区域 (C 恒定 区) 和恒 速运 行 区域 ; 第 三 阶段是 风力 发 电机组 运行 在额 定风 速 以上 的 区 域, 也称为恒功率 区域 。 根据变速变桨风力发电机组在不同区域 的运行 情况 , 基本的控制策 略为 : 在额 定风 速 以下 时 , 主要 是调节发电机反力矩使 转速跟 随风速 变化 , 以获得
等。
模糊控制是 以模糊集 合论 、 糊语 言变量及 模 模
糊逻辑推理为基础的一种重要 而有效 的智能控制方 法 。模糊控制器由模糊化接 口、 知识库 、 推理机和模 糊判决接 口四个 基本单元组成 。模糊控制不需要 对象的精确数学模 型 , 具有较好 的动态性能 , 特别适
风
图 1 风 力 发 电系 统 结 构 图
多 , 了风 速 的大 小 和方 向随 机 变 化 以 外 , 受 电 网 除 还
的参数波动和大气条件等 因素的影响。传统 的基 于
数学模型的控制方法需要首先建立一个有效的系统 模型 , 但是 由于空气 动力学 的不确定 性和 电力 电子 模型的复杂性 , 系统模 型 的确 定很 困难 。传 统控 制方法是基 于对象 线性化模 型 的线 性控制 策略 , 文 献 [ ] 用 电功率 作 为反 馈 信 号构 成 闭环 控 制 系 2采 统, 可避免风速难于精确测量的问题 , 使风力机在各 种风速下按最大功率运行 , 实现最佳 叶尖速 比控制 。
模糊控制器的设计与仿真
以上模 糊 控制 规则 共计 2 5条 , 这些 控 制规则 可 以总结 归 纳成表 .
表 1 模糊 控 制规 则表
3 建立模糊控制系统 的仿真模 型
1 基本模糊控制器 的结构
基本 模糊控 制 器 的结 构原 理 如 图 1 示 . 所 其 中各 参数 的意 义如 下 :
( ), 分别 为系统 的设定值和系统的输 出 1 rY 值( 精确量 ) ;
图1基本模糊控制器 的结构原理图
( ) ,cu分 别为 系统误 差 、 2 ee , 误差变 化率 和模糊 控制 器 的控制输 出( 精确量 ) ;
e ,e , U ld1与 对应的输 出为 u .ldlu 1e ,e ,l的论 域取[ 6 + ] 语言值取 5个 , 一 , 6, 分别为 “ 负大
N ”,负小 N ” “ Z , 正 小 P ” “ 大 B “ S ,零 R” “ s和 正 P ” N N ,SP B . B,S P ,B取 梯 形 隶 属度 函数 ,R取 Z 三角形 隶属 度 函数.l,e u e dl,l的隶属度 函数 如 图 2所示 .
第2 6卷 第
V 12 o4 o.6N .
20 0 8年 1 J U N L FH B IN TT T F R HT C U EA DCVLE GN E IG D cm e 2 0 2月 O R A E E SIU EO C I T R N II N IE RN ee b r 0 8 O I A E
1
这 里取被 控对 象 为 : s H( )=
二 S 十
e
1
毕业设计106模糊逻辑控制器的设计1
3. 模糊逻辑控制器的设计模糊逻辑控制器(Fuzzy Logic Controller)简称为模糊控制器(Fuzzy Controller),因为模糊控制器的控制规则是基于模糊条件语句描述的语言控制的控制规则,所以模糊控制器又称为模糊语言控制器。
模糊控制器在模糊自动控制系统中具有举足轻重的作用,因此在模糊控制系统中,设计和调整模糊控制器的工作是很重要的。
模糊控制器的设计包含以下几项内容:(1)、量和确定模糊控制器的输入变输出变量(即控制量)。
(2)、设计模糊控制器的控制规则。
(3)、确定模糊化和非模糊化(又称清晰化)的方法。
(4)、选择模糊控制器的输入变量和输出变量的论域并确定模糊控制器的参数(如量化因子,比列因子)。
(5)、编辑模糊控制算法的应用程序。
(6)、合理选择模糊控制算法的采样时间。
[5] 3.1 模糊控制器的基本结构模糊控制系统一般按输出误差和误差的变化对过程进行控制,其基本的结构表示如图3.1。
首先将实际测得的精确量误差e和误差变化△e经过模糊化处理而变换成模糊量,在采样时刻k,误差和误差变化的定义为e k=yr-y kΔe k=e k-e k-1上式中yr和yk分别表示设定值和k时刻的过程输出,即为k时刻的输出误差。
用这些来计算模糊控制规则,然后又变换成精确量对过程进行控制。
模糊控制基本上由模糊化,知识库,决策逻辑单元和去模糊花四个部件组成,其功能如下:模糊化部件:检测输入变量e和△e的值,进行标尺变换,将输入变量值变换成相应的论域;将输入数据转换成合适的语言值,它可以看成是模糊集合的一种标示。
知识库:包含应用领域的知识和控制目标,它由数据和语言(模糊)控制规则库组成。
数据库提供必要的定义,确定模糊控制器(FLC)语言控制规则图3.1 模糊控制系统的基本结构和模糊数据的操作。
规则库由一组语言控制规则组成,它表征控制目标和论域专家的控制策略。
决策逻辑是模糊控制系统的核心。
它基于模糊概念,并用模糊逻辑中模糊隐含和推理规则获得模糊控制作用,模拟人的决策过程。
一种自调整模糊控制器的设计与仿真研究
2 模 糊 控 制 器 的 设 计
自调 整 的模 糊 控 制器 的结 构 如 图 1所示 。
( , 表 示 每条 规 则 的激 发强 度 ( ) 权值 ) 可 , 用 解析 式 表示 为
k = (, )= 口 * + ( 1一 口 ) ( ) * 2
口 ∈ [ , ] ∈ [ , ] 01, 01 一 式 中 , 为 误 差 加 权 因子 , 称 为 误 差 变 化 率 a称
而 能够 解决 许 多 复 杂而 又无 法 建立精 确 数 学模 型 系统 的控 制 问 题 , 已越 来越 多地 成功 应 用 于 实 际
它 们的语 言 变 量 E, C 和 U 的 语言 值 为 E
E= {j E l= { , NB NM, , P , M , Bl NS O, S P P ,
基 本论 域分 别 为 e= [ , ] e 一e e ,c= [ c e ] “ 一e ,c ,
=
模 糊 控 制器 采 用“ 数 积 一和‘ 理 算 法 , 三 元 代 ’ ’ 推 用
模 糊 关 系表 示 为
[ 一u, , 们 的 量化 论 域 为 X = Y = Z = u]它
R x Y z =∑ ∑ [ * C()* () ( ,, ) E( E j ] z ) y
中。本 文提 出 了一 种 参 数 、 则 自整 定 的 模 糊 控 规 制器 的设 计 方 法 , 进 行 了仿 真 试 验 。仿 真 结 果 并 表 明这种 模糊 控 制 器 对 被 控 对 象 的参 数 、 构 的 结 变 化 具有 良好 的适 应 能力 。
() 1 ( ∈ , ∈ J k = ( , )∈ K) , , _ f
维普资讯
・
直流串激电机调速的模糊控制仿真研究
smu ain r s l h w t a h y tm a a tr s o s ,s oh lw —s e d mal ta y—sae e - i lt e ut s o h t e s s o s t e h sa f s e p n e mo t o p e ,s l se d tt r r r ih—p e iin s e d c nr 1 o ,h g r cso p e o to.
糊控制 器 以电机 的转速 偏差及 转速 偏 差率 为输 入 , 出量 用 于控 制 斩波 调 速 的 P 输 WM 占空 比。仿 真结果表 明该 系统响应 快 , 低速 平稳 , 态误 差 小, 速精度 高。 稳 调 关键 词 : 糊控制 ; 模 直流 串激 电机 ;WM P
中图分类号 :P7 T2 3
激 电机 速度控 制进行 了仿真研 究
速度大载荷等性 能, 在工业领域有着广泛的应用。
然而, 直流 串激 电机 的机 械特性较 软 , 速度在 开环 其 运 行方式下 容易 失 控 。因此 , 立 有效 的闭环 速 度 建
控 制是十分 必要 的。
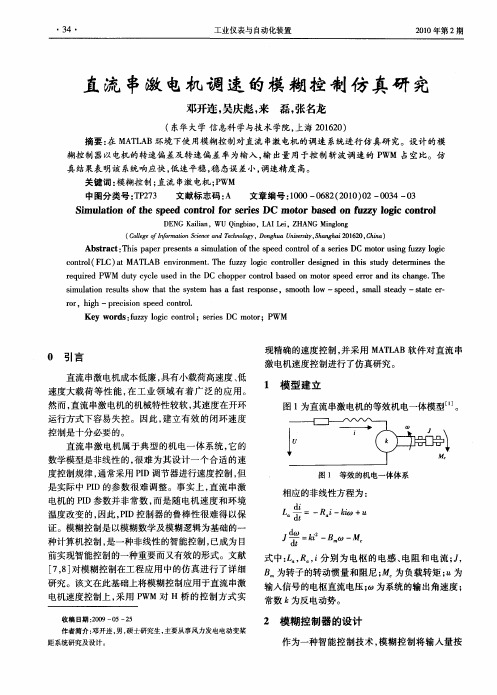
1 模型建立
图 1为直 流 串激 电机 的等 效机 电一体模 型 。
2 模糊控制器的设计
作为一种智能控制技术 , 模糊控制将输入量按
作者简介 : 开连 , , 邓 男 硕士研究生 , 主要从事风力发电电动变桨
图 1 等 效 的 机 电一 体 体 系
相应 的非线 性方程 为 :
£ i 。d
= 一
Ra —kw +“ /
. 产B c , 一 M 警 m
式 中: , 。i 别 为 电枢 的 电感 、 。R ,分 电阻 和 电流 ;, J
毕业设计洗衣机模糊控制器

第4章 神经模糊控制洗衣机设计20世纪90年代初期,日本松下公司推出了神经模糊控制全自动洗衣机。
这种洗衣机能够自动判断衣服的质地软硬程度、衣量多少、脏污程度和性质等,应用神经模糊控制技术,自动生成模糊控制规则和隶属函数,预设洗衣水位、水流强度和洗涤时间,在整个洗衣过程中实时调整这些参数,达到最佳的洗衣效果。
4.1 洗衣机的模糊控制洗衣机的主要被控参量为洗涤时间和水流强度,而影响这一输出参量的主要因子是被洗物的浑浊程度和浑浊性质,后者可用浑浊度的变化率来描述。
在洗涤过程中,油污的浑浊度变化率小,泥污的浑浊度变化率打。
因此,浑浊度及其变化率可以作为控制系统的输入参量,而洗涤时间和水流强度可作为控制量,计系统的输出,实际上,洗衣过程中的这类输入和输出之间很难用一定的数学模型来描述。
系统运行过程中具有较大的不确定性,控制过程在很大程度上依赖操作者的经验,这样一来,利用常规的方法进行控制难以奏效。
但是,如果利用专家知识进行控制决策,往往容易实现优化控制,这是在洗衣机中引入模糊控制技术的主要原因之一。
根据上述的模糊控制基本原理,可得出确定洗涤时间的模糊推理框图如图4-1所示。
其输入量为洗涤水的浑浊度及其变化率,输出量为洗涤时间。
考虑到适当的控制性能需要和简化程序,定义输入量浑浊度的模糊词集为清、较浊、浊、很浊;定义浑浊度变换率的模糊词集为零、小、中、大;定义输出变量洗涤时间的模糊词集为短、较短、标准、长。
描述输入输出变量的词集都具有模糊特性,可以用模糊集合表示。
因此,模糊概念的问题就转化为求取模糊集合的隶属函数的问题。
模糊控制器FC洗涤时间浑浊度浑浊度变化率图4-1 确定洗涤时间的模糊推理框图通常定义一个模糊子集,实际上就是确定模糊子集隶属函数形状的过程。
将确定的隶属函数曲线离散化,就得到了有限个点上的隶属度,构成了一个相应的模糊子集。
如图4-2所示,定义的隶属函数曲线表示论域x 对模糊变量A 的隶属程度。
电气电子毕业设计498模糊控制系统设计

4. 模糊控制系统的仿真以上的章节中,已经设计出了模糊控制器及计算出了模糊控制规则,以下运用MATLAB(矩阵库)中的SIMULINK软件对所设计的系统进行仿真,并根据实际的情况(如起动速度要快等)提出改善系统性能的措施和方法,进一步说明系统的三个参数即(Ke,Ku,Kec)的变化对系统性能的影响。
4.1 模糊控制系统的仿真及分析4.1.1 纯模糊控制系统模型及各环节分析纯模糊控制系统的仿真模型如图4-1所示,以下对其各个环节的作用及参数的设定给出说明:(1)、Step,Step1,Step2,Step3为给定值,其中Step给定为ug=200ε(t)v,Step1的给定值为ug1=25ε(t-300)v,Step2的给定值为ug2=25ε(t-350)v,Step3的给定值为ug3=200ε(t)v;ug1与ug2的叠加作为系统仿真过程中的干扰输入;(2)、Ke,Kec,Ku为三个系数,其中Ke为输入误差e的模糊化系数,Kec为输入误差微分e 的模糊化系数,Ku为输出的比例系数;(3)、控制作用查询表即为上章所设计出的控制作用表;(4)、Memory模块则是用来记忆前一时刻的控制电压值,以便进行控制作用的叠加Uk=Uk-1+Ku·ΔU;(5)、Scope模块则是用来观看最终的仿真结果曲线的;(6)、其他的环节包括饱和限幅、SUM、CONST等环节。
4.1.2 纯模糊控制系统的仿真及曲线4.1.2.1 模糊控制系统存在扰动及无扰动时的仿真曲线如下图4-2所示:(1)、性能指标参数如下表4-1所示:(2)、从以上的仿真图形可以清楚地看出,模糊控制系统在系统存在短时间的扰动作用时,经过短时间的调节就可以使系统重新达到稳定状态,虽然具有一定的稳态误差,但调节还是比较快的,也能够满足系统的需要的。
表4-1 性能指标但是,系统的上升时间比较长,这是因为纯模糊控制系统的控制电压是从0开始慢慢地往上累加的,因此上升比较慢,在下一节中将要给出如何解决上升时间长的方法。
毕业设计(论文)-模糊自适应pid控制器设计[管理资料]
![毕业设计(论文)-模糊自适应pid控制器设计[管理资料]](https://img.taocdn.com/s3/m/003566eb6bd97f192379e928.png)
模糊自整定PID控制器设计摘要本文主要研究的是有关模糊自整定PID控制器的设计与仿真,其中涉及到模糊控制,PID控制器,参数自整定三个领域的相关内容。
首先,我们先讨论了模糊控制的原理,历史和它的发展趋势,然后介绍了常规PID控制器和自整定算法的一些内容,最后,结合上述两种控制器的优点,设计出一种基于模糊推理的参数自整定模糊PID控制器。
模糊控制器是把专家的PID参数整定经验总结成模糊控制规则,然后形成模糊控制查询表,模糊控制过程实际上就是一个查表的过程。
模糊控制对具有非线性,时变性,较大的随机干扰等不具有精确的数学模型的控制系统具有较好的控制效果。
而PID参数整定方法是最基本的也是最常用的方法被广泛的应用于各个领域。
将两者有效的结合形成的模糊自整定PID控制器,它的简单性和可实施性是现而易见的。
本文将这种模糊自整定PID控制器应用于带有时滞的二阶系统中并将其同Z-N整定方法,临界灵敏度等常规PID整定方法进行比较。
结果表明,这种控制算法的控制效果明显好于传统的方法。
关键词:模糊控制,PID控制,参数自整定,隶属函数Design of Fuzzy Self-tuning PID Controlle rAbstractIn this paper, the design and simulation of a self-turning fuzzy PID type controller is proposed. The fuzzy control, PID controller and parameters self-turning are described.Firstly, the principle, history and developing trend of fuzzy control are discussed. Secondly, the conventional PID controller and self-turning are introduced. Finally, a self-turning PID controller based on fuzzy inferences is designed by combining the advantages of first one with a second one.A fuzzy controller is built based on the expert’s experiences, then it is changed into an inquiry table. The process of the fuzzy control practically inquires the table. The fuzzy control is good at the inexactly mathematical model such as non-linear, time-variant systems and so on. PID self-turning is the basest and most-used. After attaining the PID self-turning to the fuzzy controller, it is obvious that this method is simple and feasible.In this paper, the fuzzy control PID controller is used to a two-order plus time delay system. Simulation results show that the algorithm has better performance than traditional methods.Keywords Fuzzy control, PID control, self-turning, membership function目录第一章绪论 (1) (1) (1) (2)PID控制算法的基本理论 (3)PID控制器参数整定 (4) (4)第二章模糊控制概述 (4) (4) (5) (5) (6) (9) (9) (10) (12) (16) (18) (19) (20) (22)第三章PID控制原理极其参数自整定概述 (23) (23) (24) (26) (29) (32)第四章模糊自整定PID控制器设计 (35) (35) (36)第五章仿真与分析 (46) (46) (46)小结 (51)第六章结束语 (52)谢辞 (53)参考文献 (54)第一章绪论PID控制是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程控制,至今仍有90%控制回路具有PID结构。
模糊控制毕业论文
模糊控制毕业论文模糊控制毕业论文模糊控制是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性的问题。
在现实世界中,许多系统的行为往往难以用精确的数学模型来描述,而模糊控制正是为了解决这一问题而出现的。
在毕业论文中,研究者可以选择模糊控制作为研究对象,通过深入探究其原理和应用,为实际问题提供解决方案。
首先,毕业论文可以从模糊控制的基本原理入手。
模糊控制的核心思想是将模糊集合和模糊规则引入控制系统中,通过模糊推理和模糊推断来实现对系统的控制。
研究者可以详细介绍模糊集合的定义和运算规则,以及模糊规则的建立和推理方法。
此外,还可以探讨模糊控制器的结构和设计方法,包括模糊化、规则库、推理引擎和解模糊化等方面的内容。
其次,毕业论文可以选择一个具体的应用领域,研究模糊控制在该领域中的应用。
例如,可以选择智能交通系统作为研究对象,通过模糊控制来优化交通信号灯的控制策略,提高交通流的效率。
在论文中,研究者可以详细介绍交通流的模糊建模方法,以及如何根据实时交通数据进行模糊推理和控制。
此外,还可以对比模糊控制和传统控制方法在交通流控制中的效果,分析其优缺点和适用范围。
另外,毕业论文也可以选择模糊控制与其他控制方法的结合应用进行研究。
例如,可以选择模糊控制与神经网络的结合,通过神经网络的学习能力和模糊控制的推理能力,来解决复杂系统的控制问题。
在论文中,研究者可以详细介绍模糊神经网络的结构和学习算法,以及如何将其应用于具体问题中。
此外,还可以通过实验和仿真验证模糊神经网络在控制问题中的性能和效果。
最后,毕业论文还可以对模糊控制的未来发展进行展望。
模糊控制作为一种新兴的控制方法,尚存在许多待解决的问题和挑战。
研究者可以提出自己的观点和看法,对模糊控制的发展方向和应用前景进行探讨。
此外,还可以结合当前的科技发展趋势,分析模糊控制在人工智能、自动驾驶等领域中的潜在应用。
总之,模糊控制是一种重要的控制方法,具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安阳师范学院本科学生毕业论文模糊控制器的仿真研究系(院)物理与电气工程学院专业电气工程及其自动化日期 2015.06.01学生诚信承诺书本人郑重承诺:所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写的研究成果,也不包含为获得安阳师范学院或其他教育机构的学位或证书所使用过的材料。
所有合作者对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
签名:日期:论文使用授权说明本人完全了解安阳师范学院有关保留、使用学位论文的规定,即:学校有权保留送交论文的复印件,允许论文被查阅和借阅;学校可以公布论文的全部或部分内容,可以采用影印、缩印或其他复制手段保存论文。
签名:导师签名:日期:模糊控制器的仿真研究王方启(安阳师范学院物理与电气工程学院,河南安阳 455000)摘要:本文对模糊控制系统的设计及仿真进行研究,对模糊控制及仿真技术的概念、特点、发展及应用进行了论述,简述了模糊控制的基本理论。
在此基础上,详细介绍了模糊控制系统的系统组成和基本工作原理。
同时,阐述了模糊控制器的结构和基本设计方法。
最后,通过仿真结果进而对模糊控制系统进行改进。
使用MATLAB对系统进行仿真,结果表明系统的动态性能得到了提高。
关键词: 模糊PID控制器;MATLAB;仿真1 引言在工程实际应用中,应用最广泛的调节器控制规律为比例、积分、微分控制,简称PID控制。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、鲁棒性好,工作可靠、调整方便而成为工业控制的主要技术之一。
但是对一些大惯性、非线性和时变的系统常规PID控制就无能为力了。
由于负载扰动或环境变化,受控过程参数和模型结构均发生变化,由于受到参数整定方法烦杂的困扰,常规PID控制器参数往往整定不良、性能欠佳,对运行工况的适应性差。
本文将模糊控制和PID控制结合起来,应用模糊推理的方法实现对PID参数进行在线自整定,实现PID参数的最佳调整,设计出参数模糊自整定PID控制器,并进行了Matlab/Simulink仿真。
仿真结果表明,与常规PID控制系统相比,该设计获得了更优的鲁棒性和动、静态性及具有良好的自适应性。
模糊控制是以模糊集合论作为它的数学基础的。
模糊控制就是利用模糊集合理论,把人的模糊控制策略转化为计算机所能接收的控制算法,进而实施控制的一种理论和技术。
它能够模拟人的思维因而对一些无法构建数学模型的系统可以进行有效的描述和控制,除了用于工业,也适用于社会学、经济学、环境学、生物学及医学等各类复杂系统。
模糊控制与PID控制结合构成模糊PID控制既可实现PID控制的功能又可实现模糊控制的作用,克服PID控制遇到的问题。
因此研究模糊PID控制具有十分重要的现实意义。
2 常规PID控制2.1 PID控制器概述在过去的几十年里,PID控制器在工业控制中得到了广泛应用。
在控制理论技术飞速发展的今天,工业过程控制中95﹪以上的控制回路都具有PID结构,并且许多高级控制都是以PID控制为基础的。
PID控制器由比例单元(P)、积分单元(I),微分单元(D)组成。
PID控制器具有以下优点:(1)原理简单,使用方便,PID参数(Kp,Ki和 Kd)可根据过程动态特性及时调整。
(2)应用范围广,适应性强。
PID控制广泛适用与化工冶金、石油、热工等工业生产中。
(3)鲁棒性强,即其控制品质对被控制对象特性的变化不太敏感。
PID控制也有其固有的缺点。
PID在控制非线性、时变、耦合及参数和结构不确定的复杂过程时,效果不是太好;最主要的是,如果PID控制器不能控制复杂过程,无论怎么调参数都没用。
3 模糊PID控制3.1模糊控制起源模糊控制的诞生是和社会科学技术的发展与需要分不开的。
随着科学技术的迅速发展,各个领域对自动控制系统精度、响应速度、系统稳定性与适应能力的要求越来越高,所研究的系统也日益复杂多变。
然而,由于以一系列原因,诸如被控对象或过程的非线性、时变性多参数间的强烈耦合、较大的随机干扰、过程机理错综复杂、各种不确定性以及现场测量手段不完善等,难以建立被控对象的数学模型。
虽然常规PID控制可以解决一些问题,但范围是有限的。
对于那些难以建立数学模型的复杂被控对象,采用传统控制方法,包括基于现代控制理论的控制方法,往往不如一个有实践经验的操作人员所进行的手动控制效果好。
因为人脑的重要特点之一就是有能力对模糊事物进行识别和判决,看起来似乎不确切的模糊手段常常可以达到精确的目的。
人的经验是一系列含有语言变量值的条件语句和规则,而模糊集合理论又能十分恰当地表达具有模糊性的语言变量和条件语句。
3.2模糊控制器的基本结构与组成模糊控制器主要由模糊化接口、模糊推理、解模糊化接口和知识库1四部分组成。
模糊化接口的作用是将输入的精确量转化成模糊化量,并用相应的模糊集合来表示。
模糊推理是模糊控制器的核心.它具有模拟人的基于模蛳概念的推理能力.该推理过程是基于模糊逻辑中的蕴涵关系及推理规则来进行的。
反模糊化接口的作用是将模糊推理得到的控制量变换为实际用于控制的精确控制量。
知识库中包含了具体应用领域的知识和要求的控制目标,它通常由数据库和模糊控制规则两部分组成。
模糊控制器的基本组成如图1所示: 图1 模糊控制器的基本组成 在模糊控制中.一般通过一组语言描述的规则来表示专家的知识.专家知识通常具有Jf(满足一组条件)then(可推出~组结论)的形式。
当论域为离散量时,经过量化后的输入量个数是有限的,可以针对输入情况的不同组合离线计算出相应的控制量,从而组成一张控制表.能够减少在线的运算量.这种控制方法很容易满足实时控制的要求。
在这种模糊控制结构中,通常用误差和误差变化作为模糊控制器的输入量。
先对它们进行模糊量化处理.得到模糊变量E 和Ec ,按模糊控制规则“进行模糊决策得到模糊控制量u .再经过解模糊和比例变化得到实际控制量输出。
模糊控制原理,如图2所示。
图2 模糊控制器的基本原理 由此可见,模糊控制器实质上是反映输入语言变量与输出语言变量及语言控制规则的模糊定量关系算法结构,一般常用的是二维模糊控制器,即以偏差和偏差变化率作为输入。
工作过程可概括为下述几个步骤:(1)将输入变量的精确值变为模糊量;(2)根据输入变量(模糊量)及模糊控制规则,按模糊推理合成规则计算控制量(模糊量);(3)上述得到的控制量(模糊量)清晰化得到计算精确的控制量。
4 模糊控制器的设计4.1语言变量隶属度函数的确定模 糊 化 d/dt 模糊控 制规则 清晰化A/D 模糊控制器 D/A执行机 构 传感器模糊控制器采用两输入三输出的形式,以e 和ec 为输入语言变量,p k 、i k 和d k 为输出语言变量。
输入语言变量的语言值均取为“负大”(NB)、“负中”(NM)、“负小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)7种.输出语言变量的语言值均取为“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)4种.将偏差e 和偏差变化率ec 量化到(-3,3)的区域内,输出量化到(0,3)的区域内。
4.2模糊控制器设计Matlab 模糊控制工具箱为模糊控制器的设计提供了一种非常便捷的途径,通过它我们不需要进行复杂的模糊化、模糊推理及反模糊化运算,只需要设定相应参数,就可以很快得到我们所需要的控制器,而且修改也非常方便。
下面将根据模糊控制器设计步骤,一步步利用Matlab 工具箱设计模糊控制器。
图3 模糊控制器 下面都是在窗口中进行模糊控制器的设计。
1.确定模糊控制器结构:即根据具体的系统确定输入、输出量。
这里可以选取标准的二维控制结构,即输入为误差e 和误差变化ec ,输出为控制量u 。
注意这里的变量还都是精确量。
相应的模糊量为E ,EC 和U ,选择增加输入(Add Variable)来实现双入三出控制结构。
图4模糊控制器输入输出量2.输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。
首先要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,例如可以设置误差E(此时为模糊量)、误差变化EC、控制量U的论域均为{-3,-2,-1,0,1,2,3};然后为模糊语言变量选取相应的隶属度函数。
在模糊控制工具箱中,在Member Function Edit中即可完成这些步骤。
首先打开Member Function Edit窗口.图5模糊化然后分别对输入输出变量定义论域范围,添加隶属函数,以E为例,设置论域范围为[-3 3],添加隶属函数的个数为7.图6 模糊化然后根据设计要求分别对这些隶属函数进行修改,包括对应的语言变量,隶属函数类型。
图7隶属函数3.模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。
首先要确定模糊规则,即专家经验。
对于这个二维控制结构以及相应的输入模糊集,我们可以制定49条模糊控制规则。
(1)当e 很大时,不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小。
同时为了防止积分饱和,此时应取较大p k ,较小的i k 和d k 取零。
(2)当0>⨯ec e 时,说明误差在向误差绝对值增大方向变化。
此时若误差较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差绝对值,此时取较大的p k ,d k 不能太大,取较小的i k 值。
若误差绝对值较小,控制器实施一般的控制作用,只要扭转误差的变化趋势,使其朝误差绝对值减小方向变化。
(3)当0<⨯ec e 或0=e 时,说明误差的绝对值朝减小的方向变化,或者已达到平衡状态。
此时,可采取保持控制器输出不变。
(4)当0,0≠=⨯e ec e 时,表明系统的曲线与理论曲线平行或一致,为使系统具有良好的稳态性能,应采取较大p k 和i k 值,同时避免设定值附近振荡,并考虑系统的抗干扰性能,适当选取d k 值。
设⎪⎩⎪⎨⎧∆+'=∆+'=∆+'=d d di i i p p p k k k k k k k k k (5) 式(5)中p k ',i k '和d k '为系统的经典PID 参数,一般用Z-N 法来确定。
根据PID 参数的整定原则及专家经验,采用if-then 形式,根据文中归纳的参数整定原则,可建立如下模糊控制规则:(1) If (E is NB) and (Ec is NB )then (Kp is PB)(Ki is NB)(Kd is PS)(2) If (E is NB) and (Ec is NM )then (Kp is PB)(Ki is NB)(Kd is NS)(3) If (E is NB) and (Ec is NS )then (Kp is PM)(Ki is NM)(Kd is NB)(4) If (E is NB) and (Ec is ZO )then (Kp is PM)(Ki is NM)(Kd is NB)(5) If (E is NB) and (Ec is PS )then (Kp is PS)(Ki is NS)(Kd is NB)(6) If(E is NB) and (Ec is PM )then (Kp is ZO)(Ki is ZO)(Kd is NB)(7) If (E is NB) and (Ec is PB )then (Kp is ZO)(Ki is ZO)(Kd is PS)(8) If (E is NM) and (Ec is NB )then (Kp is PB)(Ki is NB)(Kd is PS)(9)If (E is NM ) and (Ec is NB )then (Kp is PB)(Ki is NB)(Kd is NS)(10) If (E is NM) and (Ec is NS )then (Kp is PM)(Ki is NM)(Kd is NB)(11) If (E is NM) and (Ec is ZO )then (Kp is PS)(Ki is NS)(Kd is NM)(12) If (E is NM) and (Ec is PS )then (Kp is PS)(Ki is NS)(Kd is NB)(13) If (E is NM) and (Ec is PM )then (Kp is ZO)(Ki is ZO)(Kd is NS)(14) If(E is NM) and (Ec is PB )then (Kp is NS)(Ki is ZO)(Kd is ZO)(15) If (E is NS) and (Ec is NB )then (Kp is PM)(Ki is NB)(Kd is ZO)(16) If (E is NS) and (Ec is NB )then (Kp is PM)(Ki is NM)(Kd is NS)(17) If (E is NS) and (Ec is NS )then (Kp is PM)(Ki is NS)(Kd is NM)(18) If (E is NS) and (Ec is ZO )then (Kp is PS)(Ki is NS)(Kd is NM)(19) If (E is NS) and (Ec is PS )then (Kp is ZO)(Ki is ZO)(Kd is NS)(20) If(E is NS) and (Ec is PM )then (Kp is NS)(Ki is PS)(Kd is NS)(21) If (E is NS) and (Ec is PB )then (Kp is NS)(Ki is PS)(Kd is ZO)(22) If (E is ZO) and (Ec is NB )then (Kp is PM)(Ki is NM)(Kd is ZO) ……制定完之后,会形成一个模糊控制规则矩阵,然后根据模糊输入量按照相应的模糊推理算法完成计算,并决策出模糊输出量。