超声波传感器对用户距离的探测分析
超声波传感器及其应用

超声波传感器及其应用
超声波传感器是一种基于超声波原理工作的传感器,能够将超声波转化为电信号并进
行探测和测量。
它具有测距精度高、反应速度快、不受环境光影响等优点,因此在许多领
域都有广泛的应用。
超声波传感器的工作原理是利用超声波的回波时间来计算物体与传感器的距离。
传感
器通过发射超声波信号,然后接收回波信号,并根据回波信号的延迟时间来计算距离。
超
声波在空气中的传播速度是已知的,因此可以根据发射和接收的时间差来计算出距离。
超声波传感器的应用非常广泛。
以下是几个常见的应用领域:
1. 距离测量:超声波传感器可以精确测量物体与传感器的距离,因此在自动化、物
流和仓储等领域广泛应用。
比如在自动门系统中,超声波传感器可以探测到人体的距离,
从而自动打开门。
4. 非接触式测量:由于超声波的特性,超声波传感器可以用于非接触式测量和探测。
比如在医学领域,超声波传感器可以用于体温测量、血压测量和心脏监测等。
5. 测厚和质检:超声波传感器可以测量物体的厚度,并用于质量检测和控制。
比如
在制造业中,超声波传感器可以检测产品的厚度和质量,从而确保产品的制造质量。
超声波传感器具有许多优点和广泛的应用领域。
随着科技的进步,超声波传感器的应
用会越来越广泛,为各行各业带来更多的便利和效益。
超声波传感器测距的教案
超声波传感器测距的教案教案一课题:超声波传感器测距教学目标:1. 让学生理解超声波传感器的工作原理和应用。
2. 学生能够掌握超声波传感器测距的方法和步骤。
3. 通过实验探究,培养学生的科学思维和实践能力。
4. 激发学生对科学技术的兴趣和探索精神。
教学重点与难点:- 教学重点:超声波传感器的工作原理和测距方法。
- 教学难点:理解超声波传播过程中的时间与距离的关系。
教学方法:实验探究法、小组合作法教学过程:一、导入新课展示一些利用超声波传感器的实际应用场景,如倒车雷达、自动门等,引导学生思考超声波是如何实现测距功能的。
二、新课讲授1. 讲解超声波的特性,如方向性好、穿透力强等。
2. 引出超声波传感器,结合实物介绍其结构和组成部分。
3. 阐述超声波传感器测距的原理:通过发射超声波并接收反射波,根据时间差计算距离。
三、实验探究1. 分组进行实验,每组一套超声波传感器实验装置。
2. 教师指导学生进行实验操作,包括连接电路、设置参数等。
对话示例:师:“同学们,现在大家开始分组进行实验,先检查一下实验装置是否齐全,然后按照步骤进行操作。
”生:“好的,老师。
”师:“在连接电路的时候要注意正负极哦,有不明白的随时问老师。
”3. 记录实验数据,如发射和接收的时间差。
四、数据分析与讨论1. 各小组汇报实验数据。
2. 共同分析数据,探讨影响测距精度的因素。
对话示例:师:“请各个小组把你们的实验数据分享一下。
”生:“我们这组测了几个不同距离的数据……”师:“大家一起来分析一下这些数据,看看能发现什么问题。
”五、知识拓展介绍超声波传感器在其他领域的应用,如工业自动化、医疗等。
六、总结归纳1. 回顾本节课的重点内容:超声波传感器的原理和测距方法。
2. 强调实验过程中的注意事项和科学态度。
教材分析:本节课的内容紧密结合实际应用,通过对超声波传感器的学习,使学生了解现代科技在日常生活中的应用。
教材内容循序渐进,从超声波的基本特性到传感器的工作原理,再到具体的测距方法,有利于学生逐步掌握知识。
超声波传感器的使用方法和测距准确度

超声波传感器的使用方法和测距准确度超声波传感器是一种常用的测距设备,它利用了声波在空气中传播的特性来测量距离。
在工业自动化、智能家居和机器人等领域,超声波传感器被广泛应用。
本文将介绍超声波传感器的使用方法和测距准确度,以帮助读者更好地了解和应用这种传感技术。
一、超声波传感器的工作原理超声波传感器通过发射超声波脉冲并接收反射回来的声波来测量距离。
其工作原理基于声波在空气中传播的速度是已知的,因此可以通过测量声波的往返时间来计算距离。
传感器的发射器发射超声波脉冲,然后等待接收到反射波的时间,通过测量时间间隔就可以得到距离。
二、超声波传感器的使用方法超声波传感器的使用非常简单,只需连接至相应的电路和控制器。
在测距前,用户需要进行以下几个步骤:1. 确定适当的超声波传感器型号:超声波传感器有多种不同型号和规格可供选择,因此用户需要根据实际需求选择适合的型号。
一般来说,传感器的功耗、测距范围和精度是需要考虑的重要因素。
2. 连接电源和信号线:超声波传感器通常需要接入电源和信号线,以便传输测距数据和控制信号。
用户需要根据传感器的规格和要求,正确连接相应的线缆。
3. 安装传感器:根据实际应用场景,用户需要将超声波传感器正确安装在测距的目标物体附近。
要保证传感器与目标物体之间没有遮挡物,以充分发挥传感器的功能。
4. 数据采集和处理:连接超声波传感器后,用户可以通过相应的控制器或电路板来采集和处理传感器输出的数据。
一般情况下,用户可以将测距数据用数字设备进行显示或存储,也可以通过编程实现更复杂的功能。
三、超声波传感器的测距准确度超声波传感器的测距准确度是使用者非常关注的一个重要指标。
其测距准确度主要受到以下几个因素的影响:1. 传感器频率:超声波传感器的频率决定了其测距能力的上限。
一般来说,频率越高,传感器的测距精度越高。
但是高频的传感器通常功耗也较高,因此需要根据实际需求权衡测距范围和功耗。
2. 目标物体的特性:不同的目标物体对超声波的反射能力不同,这也会影响传感器的测距准确度。
超声波传感器测距离

目录一、课程设计任务书 (2)二.超声波传感器测距原理 (4)2.1超声波传感器 (4)2.2超声波测距原理概述 (5)三.系统总体设计方案 (6)四.系统的硬件结构设计 (8)4.1单片机最小系统原理概述 (8)4.2超声波发射电路 (14)4.3超声波检测接收电路 (14)4.4超声波测距系统的显示电路设计 (15)4.5PROTUES仿真硬件电路图 (15)五.系统软件的设计 (16)5.1超声波测距仪的算法设计 (16)5.2程序流程图 (16)5.3主程序设计 (18)5.4定时中断服务子程序设计 (18)5.5超声波发生子程序和超声波接收中断程序设计 (19)六.调试结果 (20)七.系统误差来源及解决方案分析 (22)八.收获体会 (23)参考文献 (24)附录一超声波测距电路原理图 (25)附录二程序清单 (26)附录三元件清单 (36)一、课程设计任务书《智能仪器综合设计》课程设计任务书题目:超声波测距系统设计一、课程设计任务超声波测距主要应用于倒车雷达、建筑施工工地以及一些工业现场,如液位、井深、管道长度等场合。
超声波测距的原理是,发射器发射出超声波,遇到被测物体后返回声波由接收器接收,测量出超声波发射和接收到回波的时间差,超声波波速与时间差乘积的一半即为被测距离。
该超声波测距系统以A T89S52单片机为核心进行设计。
二、课程设计目的通过本次课程设计使学生掌握:1)智能仪器的一般设计、实现方法;2)超声波传感器测距的工作原理;3)智能仪器设计的实际调试技巧。
从而提高学生对智能仪器的设计和调试能力。
三、课程设计内容和要求1、掌握超声波传感器的测距原理,测量结果数显;2、根据超声波测距原理,设计超声波测距系统的硬件结构电路并画出原理图;3、用PROTUES对所设计的系统进行仿真;4、给出软件设计流程图;5、系统软硬件连调,给出该测距系统的性能指标,并对产生的误差进行分析。
四、课程设计报告要求报告中提供如下内容:1、目录2、正文(1)课程设计任务书;(2)超声波传感器测距原理;(3)系统总体设计方案;(4)超声波测距系统硬件电路的设计,包含发射电路、接收电路和显示模块的设计,用PROTEL软件绘制硬件原理图并列出器件清单,用PROTUES仿真;(5)软件设计:程序流程图及清单(子程序不提供清单,但应列表反映每一个子程序的名称及其功能);(6)调试结果:各个关键点波形和实测数据组;(7)系统误差来源及解决方案分析;3、收获、体会4、参考文献五、课程设计进度安排周次工作日工作内容第一周1 布置课程设计任务,查找相关资料2 熟悉智能仪器综合实验平台所提供的相关资源3 完成总体设计方案4 画出硬件原理图并进行仿真5 完成硬件接线,编写程序并调试第二周1 编写程序并调试2 编写程序并调试3 编写程序并调试及准备课程设计报告4 完成课程设计报告并于下午两点之前上交5 答辩本课题共需两周时间七、课程设计考核办法本课程设计满分为100分,从课程设计平时表现、课程设计报告及课程设计答辩三个方面进行评分,其所占比例分别为20%、40%、40%。
超声波传感器测距
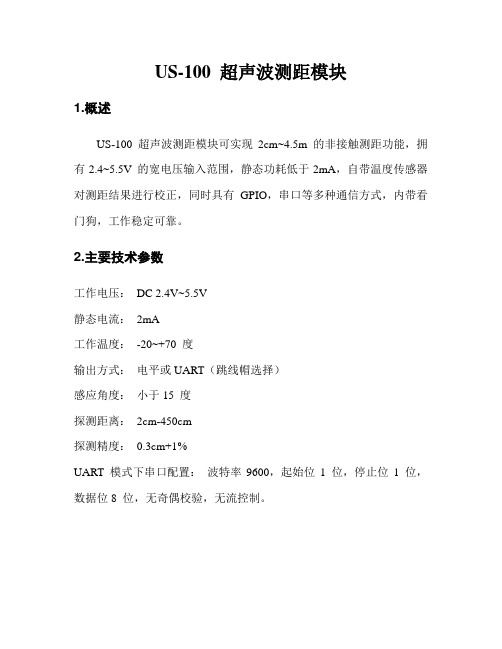
US-100 超声波测距模块1.概述US-100 超声波测距模块可实现2cm~4.5m 的非接触测距功能,拥有2.4~5.5V 的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
2.主要技术参数工作电压:DC 2.4V~5.5V静态电流:2mA工作温度:-20~+70 度输出方式:电平或UART(跳线帽选择)感应角度:小于15 度探测距离:2cm-450cm探测精度:0.3cm+1%UART 模式下串口配置:波特率9600,起始位1 位,停止位1 位,数据位8 位,无奇偶校验,无流控制。
3.实物图(自己拍的不是很清楚)4.测量原理选用超声波传感器来采集信号,超声波发射端和接收端在同一水平面上。
首先发射端向目标发射超声波,并同时启动定时器计时,超声波在空气中传播的途中一旦遇到障碍物后就会被反射回来,当接收端收到反射波后就会给负脉冲到单片机使其立刻停止计时。
定时器能够准确的记录下超声波发射点至障碍物之间往返传播所用的时间t,设声速为c,可得距离测量值为:s=ct/2,由单片机控制定时器可测得t值,从而得到s 值。
5.程序源代码本代码是基于C8051F120单片机,采用LCD液晶显示屏进行显示,经过多次调试可将误差缩小至1-2mm。
#include<c8051f120.h>#include<intrins.h>#include<declare.h>typedef unsigned char uchar;typedef unsigned int uint;extern uchar old_SFRPAGE;double n0=0,n=0;float M0, t,s;sbit D=P1^0;//连TX //输出高低电平sbit Q=P1^1;//连RXuchar flag=0;uchar flag_0=1;void timer1_int() // 定时器1,产生中断{old_SFRPAGE = SFRPAGE;SFRPAGE=0X00;TL1=0X00;TH1=0X00;TMOD|=0X90; //定时器1方式1,16位定时器功能, CKCON=0X00; //TCLK=SYSCLK/12;TCON|=0X40; //启动定时器1ET1=1;EA=1; //允许定时器1中断SFRPAGE = old_SFRPAGE;}void timer1_intr() interrupt 3{old_SFRPAGE = SFRPAGE;SFRPAGE=0X00;n0++;TF1=0;SFRPAGE=old_SFRPAGE;}void timer3_int() //定时器3溢出标志位必须使用软件清0{ //16 位自动重载定时器,当初值为0xFFDB 时为200000Hz,周期为5usold_SFRPAGE = SFRPAGE;SFRPAGE=0x01;TMR3L = 0XDB;TMR3H = 0XFF; //初值RCAP3L = 0XDB;RCAP3H = 0XFF; //重载值(捕捉寄存器)TMR3CF = 0X00; //sysclk/12 向上计数TMR3CN = 0X04; //自动重载EIE2 = 0X01;EA=1; //允许中断SFRPAGE = old_SFRPAGE;}void timer3_intr() interrupt 14{n++;if(n > 2000){n = 0;}if(n<5) //25usD=1;elseD=0;old_SFRPAGE = SFRPAGE;SFRPAGE=0x01;TMR3CN &= 0X7F; //清除中断标志SFRPAGE = old_SFRPAGE;}void port_int(){old_SFRPAGE = SFRPAGE;SFRPAGE=0x0F;P1MDOUT=0XFF; //推挽输出,键盘P3|=0X02; //液晶端口接P3XBR1=0X10; // INT1 接到端口XBR2=0X40; //允许交叉开关,全局弱上拉SFRPAGE = old_SFRPAGE;}uchar code num[16][16]={ {0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F ,0x00},{0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00 ,0x00},{0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30, 0x00},{0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E ,0x00},{0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24 ,0x00},{0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E ,0x00},{0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E ,0x00},{0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00 ,0x00},{0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1 C,0x00},{0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F ,0x00},{0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x3 8,0x20},{0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E ,0x00},{0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08 ,0x00},{0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F ,0x00},{0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18 ,0x00},{0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00 ,0x00},};//0~Fuchar code shen[]={0x00,0x00,0x00,0xFC,0x54,0x56,0x55,0x54,0x54,0x54,0x54,0xFC,0x00,0x80,0 x40,0x00,0x40,0x42,0x42,0x23,0x22,0x22,0x12,0x12,0x0A,0x46,0x82,0x7F,0x01,0x00,0x00,0x00 ,};uchar code gao[]={0x04,0x04,0x04,0x04,0xF4,0x94,0x95,0x96,0x94,0x94,0xF4,0x04,0x04,0x04,0x 04,0x00,0x00,0xFE,0x02,0x02,0x7A,0x4A,0x4A,0x4A,0x4A,0x4A,0x7A,0x02,0x82,0xFE,0x00, 0x00,};unsigned char code danwei[][16]={{0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x3 0,0x00,0x00,0x00},//:{0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3 F},//m{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x0 1},//-};//uchar code dian[]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x 00,0x00};void display (float dat){uint x1,x2,x3,x4;x1=(uint)(dat)%10;x2=(uint)((dat)/10)%10;x3=(uint)((dat)/100)%10;x4=(uint)((dat)/1000)%10;if((dat>1500)&&(dat<1900)){lcd_disword(0,0,shen);lcd_disword(18,0,gao);lcd_disletter(36,0,danwei[0]);lcd_disletter(45,0,num[x4]);lcd_disletter(54,0,num[x3]);lcd_disletter(63,0,num[x2]);lcd_disletter(72,0,num[x1]);lcd_disletter(81,0,danwei[1]);lcd_disletter(90,0,danwei[1]);}else{//x5=(uint)((dat)/10000)%10;//y1=(uint)(dat*10)%10;//y2=(uint)(dat*100)%10;//y3=(uint)(dat*1000)%10;//lcd_disletter(24,4,num[x5]);lcd_disword(0,0,shen);lcd_disword(18,0,gao);lcd_disletter(36,0,danwei[0]);lcd_disletter(45,0,danwei[2]);lcd_disletter(54,0,danwei[2]);lcd_disletter(63,0,danwei[2]);lcd_disletter(72,0,danwei[2]);lcd_disletter(81,0,danwei[1]);lcd_disletter(90,0,danwei[1]);//lcd_disletter(64,4,dian);//lcd_disletter(72,4,num[y1]);//lcd_disletter(80,4,num[y2]);//lcd_disletter(88,4,num[y3]);}}void main()uchar i;sys_int();oscx_int();pll_int();port_int();lcd_int();for(i=255;i>0;i--)delay1ms();timer3_int();timer1_int();delay1ms();lcd_clr();while(1){//display(s);if(Q==0) //当门控为0时进行计算并显示{if(flag==0){ old_SFRPAGE = SFRPAGE;SFRPAGE=0x00;M0=n0*65536+(TL1+TH1*256);t=M0/(11.0592*1000000*8/12);s=t*170000;display(s);flag=1;flag_0=1 ;SFRPAGE = old_SFRPAGE;}}elseif(flag_0==1){old_SFRPAGE = SFRPAGE;SFRPAGE=0x00;TL1=0;TH1=0;SFRPAGE = old_SFRPAGE;n0=0;flag_0=0;flag=0 ;}}}6.测量结果图为LCD液晶屏显示的身高测量值。
超声波测距实验报告

超声波测距模块工作原理
超声波发射器发射 一组超声波脉冲
脉冲遇到物体后反 射回来
超声波接收器接收 反射回来的脉冲
通过计算发射和接 收脉冲之间的时间 差,得到物体与传 感器之间的距离
编写Arduino程序,控制 超声波传感器发送和接收 信号
连接Arduino板与电脑, 上传程序并运行
调整超声波传感器的角度 和位置,确保测量距离准 确
开始测量
准备超声波传感器和Arduino板 连接超声波传感器和Arduino板 编写程序,设置触发和接收引脚 启动Arduino板,开始测量距离
数据记录和处理
添加标题
添加标题
添加标题
添加标题
拓展应用场景:将超声波测距技术 应用于更多领域,如自动驾驶、智 能机器人等。
降低成本:通过优化设计和生产工艺, 降低超声波传感器和测距系统的成本, 使其更广泛地应用于各种领域。
感谢您的观看
汇报人:XX
实验步骤
准备实验器材
超声波传感器 添加标题
连接线 添加标题
添加标题 Arduino开发板
添加标题 面包板
跳线 添加标题
测量工具 添加标题
添加标题 电脑和软件
添加标题 实验环境
搭建实验装置
准备超声波传感器、 Arduino板、面包板、跳 线等材料
连接超声波传感器与 Arduino板的引脚
连接Arduino板与面包板 的引脚
学会使用超声波传感器进行距离测 量
学会分析实验数据,得出结论
掌握数据处理和分析技巧
学习如何使用超声波传感器进行距 离测量
超声波测距报警器实验报告

超声波测距报警器实验报告一、实验目的本实验旨在设计并实现一个基于超声波的测距报警器,通过测量物体与传感器之间的距离,当距离小于设定的阈值时,触发报警装置,以实现对特定区域的距离监测和预警功能。
二、实验原理超声波测距是通过测量超声波在空气中的传播时间来计算距离的。
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,碰到障碍物后反射回来,接收器收到反射波就立即停止计时。
已知超声波在空气中的传播速度为 340 米/秒,根据计时器记录的时间 t,就可以计算出发射点距障碍物的距离 s,计算公式为:s = 340t/2 。
三、实验设备与材料1、超声波传感器模块(包括发射器和接收器)2、微控制器(如 Arduino 开发板)3、蜂鸣器4、显示屏(用于显示测量距离)5、杜邦线若干6、电源(如电池盒或 USB 电源)四、实验步骤1、硬件连接将超声波传感器的 VCC 引脚连接到电源的正极端,GND 引脚连接到电源的负极端。
将超声波传感器的 Trig 引脚连接到微控制器的数字输出引脚,Echo 引脚连接到微控制器的数字输入引脚。
将蜂鸣器的正极连接到微控制器的数字输出引脚,负极连接到电源的负极端。
将显示屏连接到微控制器的相应引脚。
2、软件编程使用 Arduino 开发环境编写控制程序。
首先,设置微控制器的引脚模式,包括输入和输出引脚。
然后,在主循环中,通过向 Trig 引脚发送一个短脉冲来触发超声波传感器发送超声波。
等待 Echo 引脚变为高电平,开始计时;当 Echo 引脚变为低电平时,停止计时,并根据时间计算距离。
将计算得到的距离与设定的阈值进行比较,如果小于阈值,驱动蜂鸣器报警,并在显示屏上显示距离和报警信息。
3、调试与测试编译并上传程序到微控制器。
进行实物测试,逐步调整传感器的位置和方向,以及阈值的大小,观察报警效果和距离测量的准确性。
五、实验结果与分析1、距离测量结果在不同距离下进行多次测量,记录测量值。
超声波传感器测量距离

一、超声波测距原理超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为V ,而根据计时器记录的测出发射和接收回波的时间差△ t ,就可以计算出发射点距障碍物的距离S , 即:S = v • △ t / 2 ①这就是所谓的时间差测距法。
由于超声波也是一种声波,其声速C与温度有关,表1列出了几种不同温度下的声速。
在使用时,如果温度变化不大,则可认为声速是基本不变的。
常温下超声波的传播速度是334米/秒,但其传播速度V易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 C ,声速增加约0.6米/ 秒。
如果测距精度要求很高,则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。
已知现场环境温度T时,超声波传播速度V的计算公式为:V = 331.45 + 0.607T ②、系统硬件电路设计图2超声波测距仪系统框图基于单片机的超声波测距仪框图如图2所示。
该系统由单片机定时器产生40KHZ勺频率信号、超声波传感器、接收处理电路和显示电路等构成。
单片机是整个系统的核心部件,它协调和控制各部分电路的工作。
工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。
当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△ t;根据公式①、②计算出被测距离,由显示装置显示出来。
下面分别介绍各部分电路:1 、超声波发射电路超声波发射电路如图3所示,89C51通过外部引脚P1.0输出脉冲宽度为250卩s , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。
由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远,可对振荡信号进行功率放大后再加在超声波传感器上。
超声波测距技术的应用案例分析
超声波测距技术的应用案例分析随着科技的不断发展,各种新颖的技术逐渐应用到我们的日常生活中。
其中一项引人注目的技术是超声波测距技术。
超声波是一种高频声波,其频率远远超过人类听觉范围,因此可以用于测量距离以及探测物体的特性。
本文将通过几个实际应用案例来分析超声波测距技术在现实生活中的应用。
第一个案例是超声波测距技术在汽车倒车雷达中的应用。
现代汽车普遍配备了倒车雷达系统,能够在倒车时发出超声波信号并接收回波,通过计算信号的时间差来判断与障碍物的距离远近。
这项技术极大地提高了驾驶人员的安全性,避免了因视野受限而导致的事故。
倒车雷达还可以通过不同的声波频率和波束角度来实现多角度探测,进一步提高了系统的准确性和可靠性。
第二个案例是超声波测距技术在医疗领域的应用。
超声波成像是一种常用的检查手段,可用于检测人体内脏器官以及胎儿的发育情况。
医生可以通过控制超声波发射器和接收器的位置和角度,获取被测物体的回波信号,并通过计算时间差来确定其位置和距离。
这种非侵入性的检查手段无辐射,对患者安全无害,因此被广泛应用于妇产科、心脏病学以及肿瘤检测等领域。
第三个案例是超声波测距技术在工业生产中的应用。
许多工业生产过程需要对物体的位置和距离进行精确测量,超声波测距技术正是一种有效的方法。
例如,在汽车制造中,超声波传感器可以被安装在设备上,用于测量和控制零部件的位置和尺寸。
在制造业中,超声波测距技术还可以用于测量液体和固体材料的水位、厚度以及质量等物理特性。
这些应用不仅提高了生产效率,还确保了产品质量和安全性。
第四个案例是超声波测距技术在安防领域的应用。
在当今社会,安全是人们关注的核心问题之一。
超声波测距技术被广泛应用于安防系统中,用于监测和探测潜在的入侵者。
例如,超声波传感器可以被安装在墙壁、门窗等位置,监测任何物体接触这些感应器时发出的超声波信号,进而触发警报。
这种应用在家庭安全、商业建筑以及金融机构等领域具有广阔的市场前景。
超声波传感器及其应用
超声波传感器及其应用超声波传感器是一种利用超声波进行测距和探测的传感器。
它通过发射超声波并测量从目标物体反射回来的超声波的时间来计算目标物体距离,从而实现对目标物体位置的检测。
超声波传感器具有测距精度高、非接触测量、适应性强等优点,因此在工业、医疗、汽车等领域有着广泛的应用。
超声波传感器的原理是利用超声波在空气中的传播特性进行测距。
超声波是频率高于人类可听到频率的波,它在空气中的传播速度为343米/秒。
传感器通过发射超声波脉冲,当超声波遇到目标物体时会被反射回来,传感器接收到反射回来的超声波并测量其时间,然后根据声波的传播时间和速度计算目标物体到传感器的距离。
通过不断地发送和接收超声波,传感器可以实时地监测目标物体的位置和距离变化。
超声波传感器主要由超声波发射器、超声波接收器和控制电路组成。
超声波发射器用于发射超声波脉冲,超声波接收器用于接收反射回来的超声波,并将接收到的信号转换为电信号。
控制电路则负责控制超声波发射和接收的时机,并将测量到的超声波传播时间转换为距离信息。
传感器还包括了外壳、连接线和输出接口等辅助部件,以便将测距结果输出给其他设备进行处理。
超声波传感器具有许多优点,使得它在各个领域都广泛应用。
超声波传感器的测距精度高,可以达到毫米级甚至更高的精度,因此在需要精确探测目标物体位置的应用中很受青睐。
超声波传感器是一种非接触测量技术,不会影响目标物体的外观和性能,也不会受到目标物体颜色、材质等影响,因此适应性强。
超声波传感器操作简单,成本低廉,易于维护,因此在工业自动化、智能家居等领域有着广泛的应用前景。
在工业领域,超声波传感器被广泛应用于测距、测高、物体检测、流量控制等方面。
例如在自动化生产线上,超声波传感器可以用来检测物体的距离和位置,实现自动化控制和装配。
在机械设备上,超声波传感器可以用来监测液位、物料高度等,以保证设备的正常运行。
在汽车制造和智能交通系统中,超声波传感器也被广泛应用于测距和避障,提高了车辆行驶的安全性。
超声波传感器的介绍

超声波传感器的介绍
超声波传感器的介绍
超声波传感器,也称为超声波探测器,是一种利用超声波的特性来测量距离和尺寸的传感器,它通过发射声波来测量物体的距离或尺寸,既可以用于测量固体物体的尺寸,也可以用于测量液体或气体的体积。
一般来说,超声波传感器将其探测范围分为三个不同的类别:室内探测(短程)、中程探测和远程探测。
短程探测距离一般在50cm以内,可以用来测量室内物体的高度或体积;中程探测距离意味着可以用来测量室外物体的高度或体积;而远程探测距离则可以超过数百米,用来测量物体的大小或位置。
由于通过超声波传感器可以检测到物体的尺寸和距离,因此它在工业自动化领域被广泛应用,比如机械组装厂的自动化系统中,可以用于检测零件的尺寸和位置,也可以用于车辆安全驾驶系统,来检测周围环境的距离等。
此外,超声波传感器还常用于现代的助记系统中,用来监控家用电器的用电情况,从而为家庭节能提供帮助。
总的来说,超声波传感器是一种用于测量物体距离、尺寸和体积的灵活高效的设备,在工业自动化、家用电器以及汽车安全等领域都有广泛的应用。
- 1 -。
传感器在测距中的应用实验

传感器在测距中的应用实验1.掌握传感器测距的工作原理;2.掌握超声波传感器的测距原理;3.掌握红外测距传感器的测距原理。
1.分析超声波测距传感器和红外测距传感器测量的电路原理;2.连接传感器物理信号到电信号的转换电路;3.软件观测距离变化时输出信号的变化情况;4.记录实验波形数据并进行分析。
1.开放式传感器电路实验主板;2.距离测量模块;3.万用表、卷尺;4.导线若干。
振动在弹性介质内的传播称为波动, 简称波。
频率在16--2×104 Hz之间, 能为人耳所闻的机械波, 称为声波; 低于16 Hz的机械波, 称为次声波; 高于2×104 Hz的机械波, 称为超声波。
当超声波由一种介质入射到另一种介质时, 由于在两种介质中传播速度不同, 在介质面上会产生反射、折射和波形转换等现象。
由于声源在介质中施力方向与波在介质中传播方向的不同, 声波的波型也不同。
通常有:(1)纵波——质点振动方向与波的传播方向一致的波(2)横波——质点振动方向垂直于传播方向的波(3)表面波——质点的振动介于横波与纵波之间,沿着表面传播的波。
横波只能在固体中传播,纵波能在固体、液体和气体中传播, 表面波随深度增加衰减很快。
为了测量各种状态下的物理量,应多采用纵波。
纵波、横波及其表面波的传播速度取决于介质的弹性常数及介质密度,气体中声速为344 m/s,液体中声速在900--1900 m/s。
超声波传感器可以分为压电式、磁致伸缩式、电磁式等,其中以压电式超声波传感器最为常用。
如图6-1所示为超声波传感器外形。
图6-1 超声波传感器外形(T发射、R接收)超声波传感器测距原理由于超声波指向性强,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪、物位测量仪等。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此得到了广泛的应用。
在本系统中,我们主要应用的是反射式检测方式。
超声波传感器的性能分析与设计
超声波传感器的性能分析与设计超声波传感器是一种常用的非接触式距离测量设备,其原理是利用超声波在介质中传播的特性,测量目标物体与传感器之间的距离。
在自动控制、机器人、汽车、航空航天等领域中有广泛的应用。
本文将从性能参数、误差影响因素、设计要点三个方面进行分析,以期为超声波传感器的应用提供参考。
一、性能参数超声波传感器的性能参数对其实际应用具有重要影响,包括测量范围、分辨率、重复性、线性度、响应时间等。
具体分析如下:(一)测量范围测量范围是指超声波传感器对目标物体与传感器之间距离的测量范围。
一般来说,测量范围决定了超声波传感器的实际应用场景。
要选择合适的测量范围,需要综合考虑测量值的精度、重复性、响应时间等因素。
测量范围越大,精度和重复性往往会受到影响。
(二)分辨率超声波传感器的分辨率是指其能够分辨两个距离之间的最小距离差值。
分辨率通常与传感器的频率和脉冲宽度有关,频率和脉冲宽度越高,分辨率越高。
在实际应用中,需要根据目标物体的特性和应用场景来选择合适的分辨率。
(三)重复性重复性是指连续多次相同的测量条件下,超声波传感器输出的距离值之间的差异度。
重复性较好的传感器输出值之间的差异较小,对应用的精度要求较高的场景更适用。
(四)线性度线性度是指超声波传感器输出值与实际距离之间的误差。
一般来说,线性度越高,误差越小,应用场景越广泛。
(五)响应时间响应时间是指传感器从接收到测量信号到输出距离值的时间。
一般来说,响应时间越短,适用性越广泛。
二、误差影响因素超声波传感器的测量误差包括系统误差和随机误差。
其中系统误差是指超声波传感器在特定的环境条件下存在的固有偏差,通常可以校准来减小其影响。
随机误差则是不可避免的、随机出现的误差,通常通过提高传感器的精度和重复性来减小其影响。
超声波传感器的测量误差受到多种因素的影响,包括介质、温度、湿度、目标体形状、表面条件等。
介质会对超声波传播速度产生影响,不同介质对应的声速不同,需要针对相应的介质进行校准。
国内超声波测距研究应用现状

国内超声波测距研究应用现状李 戈,孟祥杰,王晓华,王重秋(中国矿业大学机电工程学院,江苏徐州 221116)【摘 要】本文结合超声波测距原理,对超声波回波信号处理、新型换能器研发、发射脉冲选取的国内研究现状,以及该技术在液位测量、移动机器人定位和避障、汽车防撞、曲面仿形检测的应用现状作了综述,分析了超声波测距系统现阶段存在的常见问题,相应提出了解决方案,并对超声波测距的发展与应用趋势进行了展望。
【关键词】超声波;测距;回波处理;盲区【中图分类号】TB55 【文献标识码】A 【文章编号】1009-2307(2011)04- - Research and application status on domestic ultrasonic rangingAbstract: Based on the principle of ultrasonic ranging, this paper described the domestic research status of ultrasonic echo signal processing, new transducers designing. It also introduced the application of ultrasonic ranging technology in the field of domestic liquid-level measure, mobile robot obstacle avoidance, vehicle collision avoidance and profile measurement of surface. After that, this paper analyzed the problems in ranging system and the solutions. The developmental direction and research progress in ultrasonic ranging were also presented.Key words: ultrasonic; ranging; echo signal processing; blind areaLI Ge , MENG Xiang-jie , WANG Xiao-hua , WANG Zhong-qiu (School of Mechanical and Electrical Engineering, China University of Mining and Technology, Jiangsu Xuzhou 221116, China )1 引言随着传感器和单片机控制技术的不断发展,非接触式检测技术已被广泛应用于多个领域。
距离和位移检测实验

实验一距离位移传感器的测量一、实验目的:了解和掌握各种距离位移传感器的工作原理和测量方法。
二、实验仪器:德普施距离与位移传感器实验台DRJLWY德普施基础实验平台DRMY-ME-C德普施数据采集卡DRDAQ-USBSINO光栅尺数显表SINO-SDS3DRVI虚拟仪器实验平台DRVI-2.3三、实验原理:在德普施距离和位移传感器上集成安装了各种传感器,包括有:直线位移滑变电阻式传感器,超声波测距传感器,红外光电式测距传感器。
实验台上还安装了一个数字显示光栅尺作为位移传感器的定标工具标定。
1、直线位移滑变电阻式传感器的工作原理一、此种传感器基本结构分为三层:1.导电层(涂覆银膜用于导电)2.空气层(通过一定高度的分隔,使导电层与电阻层在自然状态下没有接触)3.导电塑料电阻层(涂覆导电塑料电阻的基层)二、作用实现当导电层受到外力向下压,会与最下层的导电塑料层发生接触,从而输出信号。
图1-1 直线位移传感器的工作原理直线位移滑变电阻式传感器(又称电子尺,电阻尺)实际上就是一个滑变电阻器。
随着压力滑块的运动,输出的电阻也随之变化,电阻的阻值与滑块距零点的位置成正比。
传感器的原理图如下图1-2所示:利用滑变电阻器的滑块引出抽头对输入电压进行分,假设出电压为0至+5V 之间的模拟电压信号,传感器的输出特性为Y = KX ,如上图1-3所示。
其中Y 为传感器的输出,X 为滑变电阻器中间抽头距零点的距离。
2、 超声波测距传感器的工作原理声波是一种能在气体、液体和固体中传播的机械波。
根据振动频率的不同,可分为次声波、声波、超声波和微波等。
1) 次声波:振动频率低于l6Hz 的机械波。
2) 声波:振动频率在16—20KHz 之间的机械波,在这个频率范围内能为人耳所闻。
3) 超声波:高于20KHz 的机械波。
超声波与一般声波比较,它的振动频率高,而且波长短,因而具有束射特性,方向性强,可以定向传播,其能量远远大于振幅相同的一般声波,并且具有很高的穿透能力。
超声波传感器测距系统的设计

超声波传感器测距系统的设计摘要:超声波是一种频率高于20KHz的声波,可用于测距、测速、清理等。
本文介绍基于美国Senscomp公司生产的600系列超声波传感器、温度传感器的单片机测距系统的设计。
关键词:超声波单片机频率温度超声波是指振动频率大于20KHz以上的,人在自然环境下无法听到和感受到的声波。
超声波的波长比一般声波要短,具有较好的方向性,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
本文超声波测距系统选用了600系列智能传感器——615088超声波传感器,温度传感器——DS18B20,微处理器采用了ATMEL公司的AT89C52。
本文对此超声波测距系统进行了分析与介绍。
1、超声波测距原理超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间计算出发射点到障碍物的实际距离。
测距的公式表示为“L=C×T”,公式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。
2、超声波测距误差分析从测距公式L=C×T中看出超声波测距的误差由超声波的传送速度和超声波的传送时间引起的。
在空气中的传送速度随着温度的上升而加快,超声波在空气中传播速度与温度的变化关系公式表示为“C=C0+0.607T”,C的单位是m/s;C0是指零度时的声波速度331.4m/s;T是指实际温度值,单位是℃。
在超声波传播速度准确的前提下,测量距离的传播时间差只要达到微秒级,就能保证测距误差小于1mm。
使用AT89C52单片机外接晶振频率为12M时,AT89C52单片机的计数器可以方便的计数到1微妙的精度,这样就能保证时间误差在1mm内。
通过分析超声波测距误差产生的原因,提高测量时间差到微秒级,以及用DS18B20温度传感器进行超声波传播速度的补偿后,设计的高精度超声波测距系统就能达到毫米级的测量精度。
超声波测距的应用及原理
超声波测距的应用及原理一、应用领域•工业自动化•智能车辆•室内定位•无人机•声呐通信•医疗诊断•智能家居二、超声波测距原理超声波测距是一种常见的非接触式测距技术,利用超声波在空气中传播的特性进行距离测量。
其原理主要基于声速与距离之间的关系。
1.声速与温度的关系:声速是超声波传播的速度,其与环境的温度密切相关。
一般而言,声速随温度的升高而增加,反之则减小。
2.超声波的发射与接收:超声波传感器通常由一个发射器和一个接收器组成。
发射器将电信号转换为超声波信号并发射出去,接收器则将接收到的超声波信号转换为电信号。
3.超声波的传播时间测量:发送超声波信号后,通过测量超声波从发射到接收的时间来计算距离。
根据声速与时间的比例关系,可以得出距离的近似值。
三、超声波测距的工作原理超声波测距系统主要由超声波传感器、控制器和显示器组成。
其工作原理如下:1.发送超声波信号:系统通过控制器触发超声波传感器发射超声波信号。
2.接收超声波信号:超声波传感器接收到反射回来的超声波信号,并将其转换为电信号。
3.计算距离:控制器根据接收到的电信号计算超声波的传播时间。
4.显示距离:通过显示器将距离信息显示出来,供用户查看。
四、超声波测距的优势与局限性优势:•非接触式测距:不受目标表面性质影响,适用于各种物体。
•高精度:能够实现毫米级的测距精度。
•响应速度快:超声波传播速度快,响应速度高。
•反应灵敏:对目标距离变化反应灵敏,适用于快速测量。
局限性:•目标形状限制:超声波的传播路径受目标形状的影响,当目标不规则或有遮挡时,测距精度可能受到影响。
•环境因素干扰:超声波的传播受到环境因素(如温度、湿度等)的影响,可能导致测距结果不准确。
•有限测量范围:超声波在空气中传播的距离有限,通常在几米范围内。
五、应用案例1. 工业自动化•超声波测距可用于物料定位、物体检测、障碍物避免等方面,提高生产效率。
2. 智能车辆•超声波测距可以用于智能停车、避障、倒车雷达等应用,提高驾驶安全性。
超声波测距传感器的设计与特性分析
超声波测距传感器的设计与特性分析随着科技的不断发展,越来越多的电子设备和产品出现在我们的生活中,成为我们必不可少的一部分。
而超声波测距传感器作为一种非常重要的感应器,近年来受到越来越多的瞩目。
它主要利用声波的反射原理,将发射出去的超声波在空气中传播,如果遇到障碍物则会反射回来,传感器就可以通过接收到回波的时间来计算出被测物体的距离。
本文将详细介绍超声波测距传感器的设计和特性分析。
1. 工作原理超声波测距传感器利用超声波在空气中传播的原理来测量距离。
它主要由发射器、接收器和处理电路组成。
首先,发射器会产生一定频率的超声波并发送出去,当这个声波碰到障碍物时,就会被反射回来,传回接收器。
接收器会将接收到的原始信号转换成数字信号,这个数字信号会被处理电路接收并处理,最终计算出被测物体与传感器之间的距离。
2. 设计要求超声波测距传感器的设计需求主要包括以下几个方面:(1)频率范围:超声波传感器工作所需的频率主要在20kHz至200kHz之间,因此,传感器的电路设计需要具有在这个频率范围内工作的能力。
(2)发射和接收灵敏度:设计者需要保证传感器的发射和接收灵敏度。
发射器需要具有足够的功率去发射超声波,而接收器需要接受足够灵敏的信号。
(3)精度和分辨率:超声波测距传感器对于测量距离的精度和分辨率非常重要。
设计者需要保证传感器在测量物体距离时的精度和分辨率都能够满足要求。
(4)防电磁干扰:在设计超声波测距传感器的时候,需要考虑到电磁干扰的因素。
在电路设计时,需要采取相应的措施来降低电磁干扰对超声波信号的干扰。
3. 设计方案超声波测距传感器的设计方案包括电路设计、 PCB 设计和外形尺寸等。
(1)电路设计超声波测距传感器的电路设计主要包括发射器、接收器和处理电路。
发射器需要产生高频超声波信号,并将信号发送出去。
接收器需要将接收到的超声波信号转换为数字信号并作为处理电路的输入。
处理电路需要计算出接收到的信号的时间,以此来确定被测物体与传感器之间的距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
超声波传感器对用户距离的探测分析
作者:王光祥王意修
来源:《现代职业教育·高职高专》2017年第02期
[摘要] 通过对超声波传感器的组成、工作原理进行阐述分析,证明系统具有测量盲区小、远近距离测量较稳定、精度符合工程指标的特点。
通过对其他传导介质的分析对比发现,超声波具有测量盲区小、测量精度较高的优点。
超声波传感器运用在电动轮椅、导盲等多领域市场广阔。
[关键词] 超声波传感器;用户距离;超声波
[中图分类号] TP212 [文献标志码] A [文章编号] 2096-0603(2017)04-0092-01
一、超声波的概念
(一)超声波的特点
超声波在科研机构中应用非常广泛,主要是因为它具有频率高、高强度的束射特性和方向性,并且它还可以实现定向传播,能量和同振幅的声波相比较,具有很大的优势,并具穿透能力,广泛运用在测距系统中。
如果说束射性是超声波测距仪广泛被采用的原因之一,那么其服从几何光学的反射、折射性能也是必不可少的因素。
在均匀介质中超声波按直线传播,遇到他类介质时,也像光波一样产生反射和折射,但能量及波型都将发生变化。
(二)超声波反射、透射能量及扩散衰减
我们知道两种介质声阻抗的特性决定了在物体或者液体等界面上的透射能量与反射能量的变化。
而且其反射波的反射强度大小与这两种介质的声阻抗特性差成正比关系,即:特性差越大,反射强度也越大;特性差越小,反射强度也越小。
选择一个例子就可以很容易看出来,空气的声阻抗特性比钢要大10万倍,由此得出超声波几乎不通过钢与空气的界面全部反射。
从而我们可以很清楚地得出,当超声波在传播过程中,传播距离越长时,能量衰减也越大。
超声波在介质表面传播过程中由于波的扩散、漫射或者被吸收的大小决定了能量的衰减大小,并且衰减的大小与距离的长短呈正向递减关系。
介质的不均匀分布是造成散射衰减的一个重要原因,当超声波被一些介质吸收后会把声能变换为热能,所以会产生能量损失。
二、超声波传感器测量的原理
超声波传感器的构成非常简单,基本上由接收电路和发射电路组成,主要的检测方法是超声波。
而超声波换能器的作用是把外界传递过来的超声波变换成电量形式输出。
在日常生活中,用户最常用的一种超声波传感器是压电式传感器。
它由两个部分构成:分别是接收探头和发射探头。
而探头正是利用压电陶瓷等材料经过其压电效应进行工作的。
那么,什么是逆压电
效应呢?一般情况下我们把高频电振动变换成高频机械振动所生成的超声波,作为超声波的发射器。
而利用正压电效应把接收到的超声振动波变换成电信号来作为超声波的接收器。
当超声波测距传感器想要测量距离的时候,就会发出超声波,并且与此同时进行的还有定时器T0开始计算时间。
我们非常清楚当超声波在空气中传播碰到障碍物的时候,它会反射回来。
并且其接收电路构成的接收器接收到反射波后就会立即停止计算时间。
超声波正常情况下在空气中的传播速度是340 m/s,再把计时器记录的时间加上就可以计算出超声波所用的总时间T,那么,由公式S=340 T/2我们就很轻松地计算出两者之间的距离。
三、超声波测距仪的应用
第三军医大学大坪医院野战外科研究所李姝颖团队设计的导盲系统,该系统是基于超声波传感器的典型示例,视觉受损人群的安全问题对于科技产品的研发是一个很大的市场,于是导盲系统孕育而生。
超声波传感器以TCT40-16T/R为基础,单片机AT89S52为核心数据控制处理中心,通过C语言进行程序设计。
此系统满足了盲人体积小、功耗低、操作方便、探测范围大等要求,顺利帮助盲人快速通过复杂环境,对出行不便的残疾人群具有重要意义。
烟台南山学院徐向美,针对市场上传感器的种类很多,电动轮椅车上一般为红外传感器、激光式传感器,具有测试距离短、夜间测试误差大的缺点,尝试安装超声波传感器,叙述了电动轮椅上超声波传感器的优点,其检测的范围广,对人体无伤害。
特别在夜晚等光线较暗的环境中,无需辅助光源,实际应用起来方便有效。
四、结束语
本系统共由两个电路组成,它们分别是接收电路和驱动电路,其作用是为了更加准确地测算距离。
通过特殊处理后可以实现0.01 m的分辨率,并且可以显示和测量的物体距离范围为0.02~5 m左右。
此类系统对于用户有很大的应用价值,它不仅有很高的精度和灵敏度,而且它的应用范围比较广,可以应用于液面和物体表面的测量。
参考文献:
[1]刘迎春,叶湘滨.传感器原理设计与应用[M].长沙:国防科技大学出版社,2004.
[2]张洪润.传感器技术大全[M].北京:北京航空航天大学出版社,2007.
[3]宋宇,朱伟华.传感器及自动检测技术[M].北京:北京理工大学出版社,2013.
[4]唐文彦.传感器[M].哈尔滨:机械工业出版社,2014.
[5]李姝颖,尹军.基于超声波传感器阵列的导盲系统设计[J].中国医疗设备:2014(10).
[6]徐向美.超声波传感器在电动轮椅车上的应用研究[J]. 中小企业管理与科技(上旬刊),2013(5):200-201.。