伺服电机与运动控制卡的连接
伺服电机的接线方法

伺服电机的接线方法伺服电机的接线方法根据不同型号、不同应用场景会有一些差异,以下是一般伺服电机的接线方法。
首先需要明确几个概念:伺服电机通常由伺服控制器驱动,伺服控制器将控制信号发送给伺服电机,使其按照预定的速度和位置运动。
伺服电机由输入端子和输出端子组成,输入端子接收来自伺服控制器的控制信号,输出端子则是电机的电源和信号引出端口。
一般来说,伺服电机的输入端子包括以下几种信号:1. 电源信号:通常伺服电机需要接受直流电源供电,电源信号即为电机的电源输入端子。
一般来说,伺服电机的电压和电流需要根据电机的额定参数和工作要求进行选择,供电电压一般为直流24V,也有一些伺服电机需要直流48V或更高的电压。
在接线时需要注意供电的极性,通常红线接正极,黑线接负极。
2. 使能信号:使能信号用于开启或关闭伺服电机,一般为一个开关信号。
伺服电机在工作前需要被使能,以便能够接收控制信号并正常运行。
使能信号通常由伺服控制器发送,接线时需要连接控制器的相应信号端口。
3. 控制信号:控制信号是指伺服控制器输出的用于控制伺服电机运动的信号,一般有脉冲信号、方向信号、速度信号等。
脉冲信号用于控制电机的旋转步进,当脉冲信号到达电机时,电机会按照设定的步进角度转动一定角度。
方向信号用于指示电机的旋转方向,一般为一个二进制信号,高电平表示正转,低电平表示反转。
速度信号用于控制电机的转速,通过改变速度信号的频率或脉冲宽度可以调整电机的转速。
控制信号的接线一般需要参考伺服控制器和伺服电机的接口定义。
4. 反馈信号:反馈信号是指电机输出的用于反馈电机运动状态的信号,一般有编码器信号、霍尔效应信号、位置传感器信号等。
反馈信号可以用于校正电机的运动位置和速度,使其更加精确。
反馈信号的接线也需要参考伺服电机的具体型号和接口定义。
除了输入端子外,伺服电机的输出端子通常包括以下几种信号:1. 电源输出:有些伺服电机还具有电源输出功能,可以将电源信号输出给其他设备作为供电。
伺服电机的控制方式和运动控制系统
伺服电机的控制方式和运动控制系统伺服电机是一种能够根据控制信号精确地控制旋转角度、转速和位置的电机,广泛应用于工业自动化领域。
在实际应用中,为了使伺服电机能够实现精准的控制,需要配合合适的控制方式和运动控制系统。
下面将介绍伺服电机的控制方式和运动控制系统。
一、伺服电机的控制方式1. 位置控制位置控制是指通过控制伺服电机的旋转角度或线性位置来控制工件或设备的位置。
在位置控制中,通常需要通过编码器等反馈装置实时监测伺服电机的位置,从而调整控制信号,使电机按照设定的位置参数进行运动。
2. 速度控制速度控制是指通过控制伺服电机的转速来实现控制目标。
通过调节电机的输入电压、电流或脉冲信号,可以实现对电机转速的精准控制。
速度控制广泛应用于需要稳定速度输出的场合,如汽车行驶控制、风机调速等。
3. 力矩控制力矩控制是指通过控制伺服电机的输出扭矩来实现对负载的力矩控制。
在一些需要对工件施加精确力矩的场合,如加工中心、机器人等,力矩控制是非常重要的控制方式。
二、运动控制系统1. 传感器传感器是运动控制系统中的重要组成部分,用于实时监测电机的位置、速度、力矩等参数。
常用的传感器包括编码器、霍尔传感器、压力传感器等,它们可以将实时采集到的数据反馈给控制系统,实现对电机的闭环控制。
2. 控制器控制器是指控制电机运动的核心部件,根据传感器反馈的数据计算出控制信号,并输出给伺服电机,以实现对其位置、速度或力矩的精准控制。
控制器通常可分为单轴控制器和多轴控制器,用于不同数量的电机同时运动的控制。
3. 运动控制算法运动控制算法是指控制系统中用于计算控制信号的算法,包括位置环控制、速度环控制、力矩环控制等。
运动控制算法的设计和优化对系统的性能和稳定性有重要影响,需要根据具体的应用场景选择合适的算法。
综上所述,伺服电机的控制方式和运动控制系统是伺服系统中至关重要的组成部分,直接影响到系统的性能和稳定性。
通过选择合适的控制方式和运动控制系统,可以实现对伺服电机的精准控制,满足不同应用场景的需求。
交流伺服电机与运动控制卡的接口实验.概要
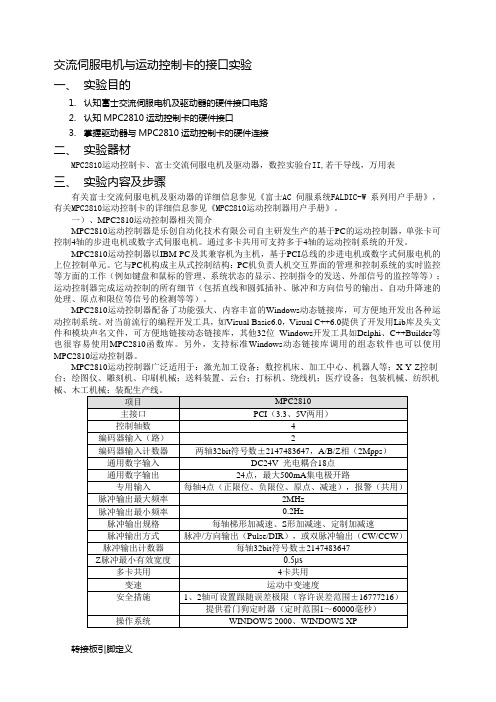
交流伺服电机与运动控制卡的接口实验一、实验目的1.认知富士交流伺服电机及驱动器的硬件接口电路2.认知MPC2810运动控制卡的硬件接口3.掌握驱动器与MPC2810运动控制卡的硬件连接二、实验器材MPC2810运动控制卡、富士交流伺服电机及驱动器,数控实验台II,若干导线,万用表三、实验内容及步骤有关富士交流伺服电机及驱动器的详细信息参见《富士AC 伺服系统FALDIC-W 系列用户手册》,有关MPC2810运动控制卡的详细信息参见《MPC2810运动控制器用户手册》。
一)、MPC2810运动控制器相关简介MPC2810运动控制器是乐创自动化技术有限公司自主研发生产的基于PC的运动控制器,单张卡可控制4轴的步进电机或数字式伺服电机。
通过多卡共用可支持多于4轴的运动控制系统的开发。
MPC2810运动控制器以IBM-PC及其兼容机为主机,基于PCI总线的步进电机或数字式伺服电机的上位控制单元。
它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控等等);运动控制器完成运动控制的所有细节(包括直线和圆弧插补、脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。
MPC2810运动控制器配备了功能强大、内容丰富的Windows动态链接库,可方便地开发出各种运动控制系统。
对当前流行的编程开发工具,如Visual Basic6.0,Visual C++6.0提供了开发用Lib库及头文件和模块声名文件,可方便地链接动态链接库,其他32位Windows开发工具如Delphi、C++Builder等也很容易使用MPC2810函数库。
另外,支持标准Windows动态链接库调用的组态软件也可以使用MPC2810运动控制器。
MPC2810运动控制器广泛适用于:激光加工设备;数控机床、加工中心、机器人等;X-Y-Z控制台;绘图仪、雕刻机、印刷机械;送料装置、云台;打标机、绕线机;医疗设备;包装机械、纺织机转接板引脚定义基于MPC2810运动控制器的典型运动控制系统由以下几部分组成:(1)MPC2810运动控制器、转接板及其连接电缆;(2)具有PCI插槽的PC机或工控机,安装有Windows2000 / XP 操作系统(不同型号的控制器支持的操作系统可能不同);(3)步进电机或数字式伺服电机;(4)电机驱动器;(5)驱动器电源;(6)直流开关电源,为转接板提供+24V电源。
PC运动控制板卡的交流伺服控制系统
控制模块
电位插刀误速G 监中P
机置补补差度功控断L
运运计计补处能处处C
动动算算偿理处理理处
控控
理
理
制制
2 PMAC运动控制器
PMAC-Programmable
Multi-Axis
Controller是可编程多轴运动控制器,也称运动控
制计算机.
它 主 要 由 MOTOROLA DSP CPU 与 DELTA
2 基于运动控制器的数控系统(功能概图)
计算机
PCI总线
运动控制器 基本模块
数控系统 (运动控制器)
开关量 I/O
其它I/O
伺服辅助控制信号
I/O模块
运动控制 指令
伺服 驱动器
位置反馈
主轴 驱动器
伺服电机
2 基于运动控制器的数控系统(PCI总线)
2 基于运动控制器的数控系统(软件系统)
数控装置
➢I/O扩展端口
➢64位位置计数范围
➢越程极限,回原点,伺服放大 ➢位置环,速度环,电流环三环
器报警,使能标志信号接口
矢量控制能力
➢LCD和VFD显示端口
➢曲线加减速控制
➢Bus and/or RS-422通信
➢自定义伺服算法能力
➢脱机运行
➢电子齿轮
➢G-Code 编程(可自定义)
➢先进的PID及扩展伺服算法
Ix20
7)通过设置 I变量可以控制以下典型 P.I.D 伺服环
Following
Error 跟随误差
Commanded
Actual
- = Position
Position
指令位置
实际位置
Com m and+
GALIL控制卡连接伺服电机的一般步骤

GALIL控制卡连接伺服电机的一般步骤1、在没有连接伺服电机的情况下,向卡输入以下命令(以下假设电机连接在X轴)KPX=0KDX=0OFX=0MOXBN(以上指令是为了确保连上电机后,上电时不会飞车)2、关闭电源,确认GALIL卡上跳线SMX没有连接。
连接伺服电机,确保以下信号连接可靠:编码器信号A+、A-、B+、B-,编码器的Z(INDEX)信号不是必须的驱动器使能信号速度指令信号3、上电此时电机应该不动,而且没有扭矩,如电机转动,则检查使能信号线是否连接正确,并检查伺服驱动器的参数,确认电机的使能是由外部信号控制。
4、向控制卡输入指令SHX此时电机应该低速转动(零飘)5、在+/-0.1的范围内,写入OFX的值。
并观察电机转速的变化,如写入数值越大,则电机正转速度越大,或者写如数值越小,电机反向转动速度越大。
则直接进行下一步。
如果与上述情况相反,则要调整MTX的值(1改为-1,或者-1改为1)。
如果电机不转,或者OFX的值对转速无影响,则检查模拟量信号线是否连接正确,检查伺服驱动器参数,是否为速度控制方式,检查伺服驱动器参数和其它接线,是否有限制信号或其它有效的限制信号输入。
6、观察编码器计数方向:如果正转时计数增加,反转时计数减少,则直接进行下一步,否则,要更改CEX的值(0改为2,或2改为0)。
如编码器不计数,或计数情况与电机转动情况无明确关系,请检查编码器信号连接线。
7、输入如下指令MOXKPX=1BNSHX此时电机应保持大致静止状态,输入TTX,反馈即控制卡当前输出电压值,即抑制零漂所需要的电压输出,输入OFX为此值。
8、计算前馈系数在驱动器参数中,查找输入电压与转速的关系,如松下电机,其出厂默认值通常为1V电压对应500rpm,不同厂家的驱动器,此参数的定义可能不同,请根据伺服的手册,计算出1V电压对应的转速V(rpm),确认电机的编码器线数P(ppr)如CEX为0或者2,那么这个数要乘以4。
松下伺服器接线总结

松下伺服电机接线总结伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1HPCI-1240 运动控制卡型号:1、主电路工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。
此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。
软件开关通过程序控制主电路的通断,正常运行情况下一直运行。
此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。
2、脉冲发送电路- 1 -接线根据:给出的控制卡功能模块图如下图所示运动控制卡PCI-1240由图可知,运动控制卡输出脉冲的方式为长线驱动方式。
)中提到长线驱动接线端子说明如下图(P151松电机下伺服使用手册中P3-35P134P3-18手册()给出的长线驱动接线方法如下图- 2 -3、编码器反馈脉冲接收电路接线原理:相脉冲计算伺服电机的旋转角度(参考关于利用伺服驱动器输出的ABZ)推网址:/Details/200810/2008103112034200001-1.shtml,具体实现计数模块)DSP的QEPOB荐做法:先将OA、脉冲四倍频(类似于的每个脉冲跳变即可实现四倍频,同时要辩相,一OB的时候只需要记住OA、为电机旋转正方向,此时脉冲累加,否则为负方向,脉OBOA超前般我们定义2500冲累减。
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈根据这个脉10000个没圈,个,由于我们四倍频了,故实际到我们这里就应该是信号,你可以知道电机的绝对位置,OC冲你就可以知道电机的相对位置。
根据出现,就应OCOC出现的时刻就是电机转子的零位,因此每次检测到一般定义法该认为绝对位置出现,这样可以清除累积误差。
根据收到的脉冲数,采用M 测速也可以计算出实际电机的转速。
接线根据:)给出的接线说明(伺服驱动器说明书P3-32P148- 3 -且需加由此说明可知,必须使用长线接收器接收伺服驱动器编码器反馈的脉冲,入终端电阻。
伺服电机的原理和接线
伺服电机的原理和接线
伺服电机是一种可以精确控制位置、速度和加速度的电机。
它通常由一台电机、一个传感器和一个控制器组成。
伺服电机的原理是通过传感器不断地监测电机的位置,并将监测到的反馈信息送回控制器。
控制器根据目标位置与当前位置之间的差异计算出所需的控制信号,然后将该信号送往电机。
电机根据控制信号调整自身的输出,以使得实际位置接近目标位置。
关于伺服电机的接线,一般需要将电机与控制器连接起来。
具体的接线方式可能会因不同的电机类型和控制器而有所差异。
一般来说,伺服电机的接线包括以下几个步骤:
1. 将电机的电源线连接到电源供应器上,确保电机有足够的电源供应。
2. 将电机的控制信号线连接到控制器的输出端口。
通常,这些信号线是用于传输控制信号,如位置、速度和加速度。
3. 将电机的反馈信号线连接到控制器的输入端口。
这些信号线用于传输电机的反馈信息,如位置反馈。
4. 对于具有其他特殊功能的伺服电机,如刹车或限位开关,还需要将相应的线路连接到控制器。
需要注意的是,在接线时应确保正确连接每根线,以免引起电机或控制器损坏。
如果不确定接线方式,建议参考电机或控制器的使用手册,或咨询专业人士的帮助。
伺服电机工作原理与接线图讲解

伺服电机工作原理与接线图讲解
1. 伺服电机工作原理
伺服电机是一种能够实现精确定位和高速控制的电动机。
其工作原理主要基于
反馈控制系统。
在伺服电机中,通常包括一个电机、一个传感器、一个控制器以及一台驱动器。
电机通过控制器接收一定的输入信号,然后传感器不断监测电机的运动状态,并将信息反馈至控制器。
控制器根据反馈信息调整输出信号,从而使电机按照预定轨迹运动,实现精确的位置控制。
伺服电机的工作原理可以简单概括为:输入信号 -> 控制器 -> 驱动器 -> 电机 -> 运动 -> 反馈信号 -> 控制器调节。
2. 伺服电机接线图讲解
伺服电机的接线图通常包括电机本体和驱动器的连接方式。
下面给出一个常见
的伺服电机接线图:
伺服电机接线图示例:
- 电机信号线1 -> 驱动器信号输入1
- 电机信号线2 -> 驱动器信号输入2
- 电机信号线3 -> 驱动器信号输入3
- 电机供电正极 -> 驱动器电源正极
- 电机供电负极 -> 驱动器电源负极
- 地线连接
注:不同型号的伺服电机和驱动器接线方式可能有所差异,请根据具体设备手册进行连接。
通过正确接线,伺服电机和驱动器之间可以正确传递信号和功率,实现精确的
运动控制。
3. 总结
本文介绍了伺服电机的工作原理及接线图讲解。
通过了解伺服电机的工作原理,我们可以更好地理解其在自动化控制系统中的应用,实现精确控制和高效运动。
正确连接伺服电机和驱动器,也是确保系统正常运行和精确控制的关键步骤。
希望本文对读者有所帮助。
基于NI运动控制卡的伺服电机控制系统研究

基于NI运动控制卡的伺服电机控制系统研究作者:贺昌勇张厚江路敦民祖汉松王朝志来源:《科技视界》 2014年第12期贺昌勇1 张厚江1 路敦民1 祖汉松1 王朝志2(1.北京林业大学工学院,中国北京 100083;2.北京中科泛华测控技术有限公司,中国北京 100192)【摘要】本文介绍了一种基于NI运动控制卡的伺服电机控制系统。
该系统采用美国国家仪器的PCI-7344运动控制卡产生脉冲和方向信号、UMI-7774接线盒、台达伺服驱动器、台达伺服电机,用Labview图形化编程软件编程,调用运动控制卡的相关函数进行运动控制。
可以动态控制轴的转速和转向,实现一个轴的往复运转,而且可以实现两个轴的同步。
【关键词】NI运动控制卡;伺服电机;运动控制;LabviewServo Motor Control System Based on the NI Motion Controller BoardHE Chang-yong1 ZHANG Hou-jiang1 LU Dun-min1 ZU Han-song1 WANG Chao-zhi2(1.School of Technology Beijing Forestry university, Beijing 100083,China;2.Beijing Zhong Ke Fan Hua Technology Co., Ltd., Beijing 100192,China)【Abstract】A kind of servo motor control system based on the NI motion controller board was introduced. The system adopts national instruments PCI-7344 motion controller board to generate pulse and direction signals, UMI-7774 terminal block, Delta servo drive ,Delta servo motor and use Labview which is a kind of graphical programming software to design operating screen program, through recalling the related function of motion controller board to motion control. The system can control speed and direction of axis dynamically, realize an axis reciprocating, what’s more it can make two axes synchronous.【Key words】NI motion controller board; Servo motor; Motion control; Labview目前,伺服电机常见的控制方式有单片机控制、DSP控制、ARM控制、PLC控制、PC机+运动控制卡等。
运动控制卡连接伺服电机的一般步骤
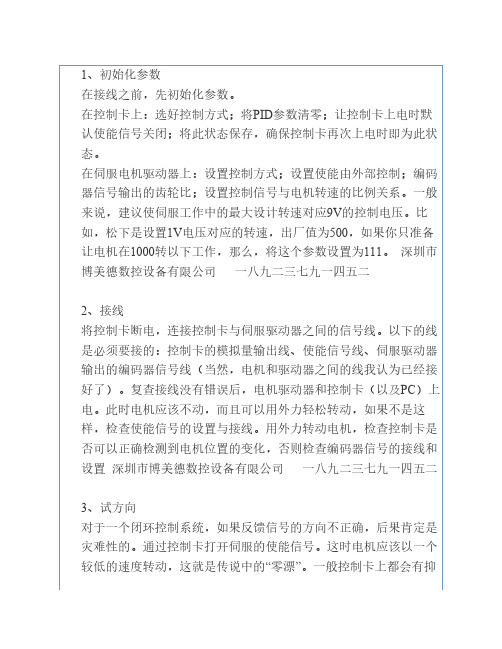
1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到步进伺服电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零漂的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求伺服电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
将控制卡和伺服的使能信号打开。
交流伺服电机控制接线图
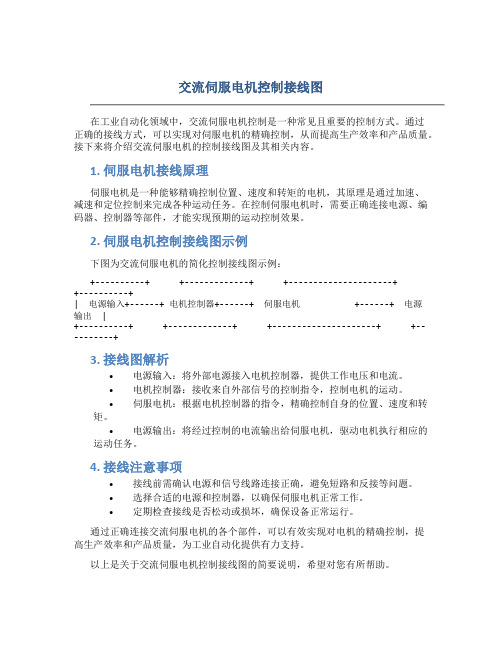
交流伺服电机控制接线图在工业自动化领域中,交流伺服电机控制是一种常见且重要的控制方式。
通过正确的接线方式,可以实现对伺服电机的精确控制,从而提高生产效率和产品质量。
接下来将介绍交流伺服电机的控制接线图及其相关内容。
1. 伺服电机接线原理伺服电机是一种能够精确控制位置、速度和转矩的电机,其原理是通过加速、减速和定位控制来完成各种运动任务。
在控制伺服电机时,需要正确连接电源、编码器、控制器等部件,才能实现预期的运动控制效果。
2. 伺服电机控制接线图示例下图为交流伺服电机的简化控制接线图示例:+----------+ +-------------+ +---------------------+ +----------+| 电源输入+------+ 电机控制器+------+ 伺服电机 +------+ 电源输出 |+----------+ +-------------+ +---------------------+ +----------+3. 接线图解析•电源输入:将外部电源接入电机控制器,提供工作电压和电流。
•电机控制器:接收来自外部信号的控制指令,控制电机的运动。
•伺服电机:根据电机控制器的指令,精确控制自身的位置、速度和转矩。
•电源输出:将经过控制的电流输出给伺服电机,驱动电机执行相应的运动任务。
4. 接线注意事项•接线前需确认电源和信号线路连接正确,避免短路和反接等问题。
•选择合适的电源和控制器,以确保伺服电机正常工作。
•定期检查接线是否松动或损坏,确保设备正常运行。
通过正确连接交流伺服电机的各个部件,可以有效实现对电机的精确控制,提高生产效率和产品质量,为工业自动化提供有力支持。
以上是关于交流伺服电机控制接线图的简要说明,希望对您有所帮助。
关于运动控制卡与驱动器差分单端接线的相关说明

关于运动控制卡与驱动器差分/单端接线的相关说明作者:雷赛智能控制股份有限公司侯光辉目前雷赛运动控制卡采用脉冲信号加方向信号的输出模式,与驱动器的电路接线有两种接线方式:差分驱动接线和单端驱动接线。
想要做到运动控制卡正常发脉冲并驱动驱动器和电机正常运行,其接线方式和运动控制卡上的相应跳线设置必须一致,这样才能正常使用控制卡,驱动器和电机。
目前我公司的运动控制卡在其正面提供了单端和差分跳线选择,用于设置差分和单端驱动方式,出厂默认设置是差分驱动方式。
如下:图1-1(以DMC2410四轴卡为例),红色框所圈部分就是控制卡跳线设置开关:图1-1 DMC2410四轴运动卡外观图如下:图1-2和图1-3是DMC2410四轴运动控制卡的差分/单端跳线详细配置图:图1-2 差分输出方式的跳线设置图1-3 单端输出方式的跳线设置图1-2是DMC2410控制卡差分输出方式的跳线设置,我司控制卡出厂默认设置值是差分输出设置的,即每个轴所对应的两个跳线开关的第1路针角和第2路针角短接,对应关系为控制卡的第一个轴对应J1和J2,即一个脉冲信号和一个方向信号,后面的轴与JX的关系依此类推。
图1-3是DMC2410控制卡单端输出方式的跳线设置,即每个轴所对应的两个跳线开关的第2路针角与第3路针角短接。
下图是控制卡差分输出方式和单端输出方式的接口电路图:图1-4 差分方式设置及接口电路图图1-5 单端方式设置及接口电路图从以上的接口电路图(图1-4和图1-5 )中可以看出,当运动控制卡设置成差分输出时,相当于两对差分信号,控制卡上面的PUL+,PUL-,DIR+,DIR-四个输出口与驱动器上面的PUL+,PUL-,DIR+,DIR-四个输入接口都要连接;当运动控制卡被设置成单端输出时,只要控制卡上面PUL-,DIR-两个输出口与驱动器上面的PUL和DIR两个输入口连接就可以了,此种方式控制卡上的PUL+和DIR+变成+5V 电压,直接可以给驱动器的共阳端提供+5V电压。
伺服电机接线

伺服电机接线介绍伺服电机是一种常用的电动机,具有精确位置控制和速度调节的能力。
为了正确使用伺服电机,需要进行正确的接线。
本文将介绍伺服电机的常见接线方法。
设备和材料在进行伺服电机接线之前,需要准备以下设备和材料: 1. 伺服电机 2. 控制器 3. 电源 4. 连接线和插头步骤下面是进行伺服电机接线的步骤:1. 确定电源类型在进行伺服电机接线之前,首先需要确定所使用的电源类型。
常见的电源类型有交流电源和直流电源。
根据电源类型的不同,选用不同的接线方法。
2. 了解伺服电机接线规范在接线之前,需要详细了解所使用的伺服电机的接线规范。
通常,伺服电机的接线规范会包括电源接线、控制信号接线和地线接线等。
- 电源接线:包括电源正、负极的接线方式,以及电源是否需要接地线。
- 控制信号接线:通常包括位置反馈信号、速度指令信号、使能信号等控制信号的接线方式。
- 地线接线:用于提供电流回路的接线方式。
3. 进行电源接线根据伺服电机的接线规范,将电源正极和负极正确地连接到伺服电机的电源接线端子上。
如果需要接地线,将接地线连接到接地端子上。
4. 进行控制信号接线根据伺服电机的接线规范,将位置反馈信号、速度指令信号和使能信号等控制信号正确地连接到伺服电机的信号接线端子上。
确保信号线的连接顺序正确,并且无松动。
5. 进行地线接线根据伺服电机的接线规范,将地线正确地连接到伺服电机的地线接线端子上。
确保地线连接牢固,并且与地面接触良好。
6. 检查接线完成接线后,仔细检查所有接线点是否正确连接,并且没有松动情况。
确保接线没有错误和短路现象。
注意事项在进行伺服电机接线过程中,需要注意以下事项: 1. 严格按照伺服电机的接线规范进行接线,避免接线错误导致设备损坏或不正常工作。
2. 在接线过程中,确保电源已经关闭,以避免触电和其他安全问题。
3. 如果不确定接线方法或遇到困难,应该参考伺服电机的产品手册或咨询相关专业人士。
结论正确进行伺服电机的接线可确保其正常工作和安全运行。
使用运动控制卡以速度方式控制伺服电机的一般步骤
1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机驱动器上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
深圳市博美德数控设备有限公司一八九二三七九一四五二2、接线将控制卡断电,连接控制卡与伺服驱动器之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服驱动器输出的编码器信号线(当然,电机和驱动器之间的线我认为已经接好了)。
复查接线没有错误后,电机驱动器和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置深圳市博美德数控设备有限公司一八九二三七九一四五二3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这时电机应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机驱动器上的参数,使其一致。
深圳市博美德数控设备有限公司一八九二三七九一四五二4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
松下伺服器接线总结..

松下伺服电机接线总结伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H运动控制卡型号:PCI-12401、主电路工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。
此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。
软件开关通过程序控制主电路的通断,正常运行情况下一直运行。
此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。
2、脉冲发送电路接线根据:运动控制卡PCI-1240给出的控制卡功能模块图如下图所示由图可知,运动控制卡输出脉冲的方式为长线驱动方式。
松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图手册P3-18(P134)给出的长线驱动接线方法如下图3、编码器反馈脉冲接收电路接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考网址:/Details/200810/2008103112034200001-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。
根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。
根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。
接线根据:伺服驱动器说明书P3-32(P148)给出的接线说明由此说明可知,必须使用长线接收器接收伺服驱动器编码器反馈的脉冲,且需加入终端电阻。
伺服驱动器控制模式的接线及其注意事项

伺服驱动器控制模式的接线及其注意事项伺服驱动器是一种用来控制伺服电机的设备,可以实现精确定位、速度控制和运动控制等功能。
在使用伺服驱动器时,正确的接线和注意事项非常重要,这样可以确保设备的安全性和稳定性。
下面将介绍伺服驱动器控制模式的接线以及注意事项。
一、伺服驱动器控制模式的接线1.电源接线:首先,应将伺服驱动器与适当的电源连接。
电源的选择应根据伺服驱动器的额定电压来确定,以避免过载和损坏设备。
接线时需要注意将正极和负极正确地连接到伺服驱动器上,以确保正常运行。
2.控制信号接线:伺服驱动器通常有多个控制信号接口,包括使能信号、方向信号和脉冲信号。
使能信号用于启用或禁用伺服驱动器,方向信号用于控制电机的转向,脉冲信号用于指示电机的运动位置。
这些信号应正确接线,以确保伺服驱动器正常工作。
3.反馈信号接线:伺服驱动器通常还有反馈信号接口,用于接收电机的转速和位置反馈信息。
这些信号可以是模拟信号或数字信号,接线时需要确保正确连接,以保证准确的位置控制。
4.通信接口接线:一些伺服驱动器还具有通信接口,用于与其他设备进行通信。
这些接口可以是串口接口、以太网接口或CAN接口。
接线时需要根据具体的通信协议和接口类型进行正确的连接,以确保通信的稳定和可靠。
二、注意事项1.接线前仔细阅读说明书:在进行伺服驱动器接线之前,应仔细阅读设备的说明书。
说明书中通常包含详细的接线图和接线步骤,按照说明书的要求进行接线可以避免错误和故障。
2.接线时断开电源:在进行伺服驱动器的接线时,务必断开电源,以避免电压冲击或其他危险。
3.注意接线的顺序:在进行伺服驱动器接线时,应注意按照正确的顺序进行接线。
通常,应先接地线,再接电源线,最后接控制信号线和反馈信号线。
4.使用合适的电缆和连接器:在进行伺服驱动器的接线时,应选择合适的电缆和连接器。
电缆应具有足够的电压和电流承载能力,连接器应可靠牢固,以确保接线的稳定性和可靠性。
5.避免干扰:在进行伺服驱动器的接线时,需要注意避免干扰。
运动控制卡 PCI独立2轴驱动 伺服电机控制卡
32 位递增/递减计数器用于附加编码器 可方便地与任意步进电机、AC 或 DC 伺服电机相连接 所有数字量输入/输出信号均有 2500Vrms 隔离
根据外部信号的驱动操作
●
外部减速停止/立即停止信号
IN0~3 每一个轴 4 个外部停止信号 任何信号都可以选择有效无效。可以作为通用输入使用。 伺服马达输入信号 ● ALARM(警报) ,INPOS(定位完毕) 任何信号都可以选择有效/无效。 通用输出/输入信号 ● IN0~3 每一个轴 4 个 ● OUT0~7 每一个轴 8 个 超越限制信号输入 ● +方向,-方向每轴一个 有效时,可选立即停止/减速停止。 紧急停止信号输入 ● 全轴只有一个 EMGN,在低电平时立即停止全轴的驱动脉冲。
5.1 5.2 5.3 安装 ···································································································· 5 通用输入口接线方式 ··············································································· 5 驱动程序的安装 ····················································································· 6
leadshine 交流伺服驱动器 L6E伺服系统功能手册说明书

交流伺服驱动器L6E伺服系统功能手册◆非常感谢您本次购买雷赛产品◆使用前请详细阅读此说明书,正确使用产品◆请妥善保管此说明书前言L6E系列伺服手册构成L6E系列伺服采用EtherCAT总线技术,为利于使用人员快速了解和使用L6E伺服产品及EtherCA T总线技术,L6E手册目前分2大部分,分别介绍L6E系列伺服、EtherCAT总线技术,介绍如下:A、《L6E伺服系统EtherCAT通讯功能手册》主要说明EtherCA T通讯原理及功能B、《L6E伺服系统功能手册》主要说明L6E伺服驱动器所包含的功能以及关联参数等详情手册适用对象●使用L6E伺服构建EtherCAT控制系统的开发工程师●为L6E伺服构建的设备提供支持服务的技术工程师L6E系列手册内容由浅入深,望用户可以层层阅读以便更快更好的使用L6E伺服驱动器;为利于使用人员从众多的伺服功能快速找到自己需要的功能,手册增加功能导引。
感谢您选用深圳市雷赛智能控制股份有限公司L6E系列交流伺服系统。
本手册提供了使用本系统所需知识及注意事项。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改动我司将不承担任何责任,产品的保修单将因此作废前言 ................................................................................................................................................ i i L6E系列伺服手册构成............................................................................................................. i i 手册适用对象............................................................................................................................. i i L6E系列伺服功能导引. (viii)第一章概述 (1)1.1 产品简介 (1)1.2 到货检查 (2)1.3 产品外观 (5)第二章安装 02.1储存和安装环境 02.2 伺服驱动器安装 02.2.1驱动器尺寸 (1)2.2.2安装方法 (2)2.3 伺服电机安装 (3)2.3.1 伺服电机尺寸 (3)2.3.2 安装方法 (6)第三章接口规格 (8)3.1 标准接线 (8)3.1.1配线 (8)3.1.2总线伺服配线图 (10)3.2 驱动器各端子说明 (11)3.2.1控制信号端子-CN1 (11)3.2.2编码器反馈信号端子-CN2 (12)3.2.3 EtherCAT通讯端子-CN3 (13)3.2.4 RS232通讯端子-CN4 (13)3.2.5 USB通讯端子-CN5 (14)3.2.6 主电源输入端子 (14)3.2.7 控制电源端子 (14)3.3 I/O接口原理及功能参数 (15)3.3.1 IO输入 (15)3.3.2 IO输出 (17)第四章显示与操作 (19)4.1面板显示和面板操作 (19)4.1.1概述 (19)4.1.2面板操作流程图 (20)4.1.3驱动器运行数据监视 (21)4.1.4 辅助功能 (24)4.1.5 参数保存 (26)4.1.6异常报警 (26)4.2运行前准备 (27)4.3 面板试运行 (27)4.4 总线运行须知 (28)4.4.1工作模式 (28)4.4.2 必要配置 (29)第五章功能使用 (30)5.1 位置控制 (30)5.1.1 旋转方向设定 (31)5.1.2 PP/CSP/HM指令输入处理 (31)5.1.3 软限位 (32)5.1.4 电子齿轮 (32)5.1.5指令位置滤波 (33)5.1.6 位置定位完成信号INP输出 (34)5.2 速度控制 (36)5.2.1 旋转方向设定 (36)5.2.2 PV/CSV指令输入处理 (37)5.2.3速度指令加减速功能 (37)5.2.4 速度到达信号A T-SPEED输出 (38)5.2.5 速度一致信号V-COIN输出 (39)5.2.6 零速钳位功能 (40)5.3 转矩控制 (41)5.3.1 旋转方向设定 (41)5.3.2 PT/CST指令输入处理 (42)5.3.3速度限制功能 (43)5.4 增益调整功能 (44)5.5 惯量识别功能 (50)5.6 陷波器功能 (52)5.7 前馈功能 (54)5.8 第三增益切换功能 (55)5.9 摩擦转矩补偿功能 (57)5.10 EtherCAT从站别名设定 (57)5.11 再生电阻设定 (57)5.12 安全功能 (59)5.12.1 电机最高转速限制功能 (59)5.12.2 外部制动器解除信号BRK-OFF输出功能 (59)5.12.3 伺服关闭时顺序 (60)5.12.4 转矩限制功能(TL-SEL) (60)5.12.5 报警后立即停止时间 (61)5.12.6 紧急停止功能 (61)5.13 其他功能 (62)5.13.1 零速度输出(ZSP) (62)5.13.2 位置偏差清零(CL) (62)5.13.3 位置指令禁止输入(INH) (62)5.13.4 位置单位选择 (63)5.13.5 到位信号延迟时间 (63)第六章时序图 (64)6.1 上电时序图 (64)6.2 故障时序图 (65)第七章报警与处理 (66)7.1 报警一览表 (66)7.1.1 伺服驱动报警 (66)7.1.2 EtherCAT通讯报警 (67)7.2 伺服驱动报警处理方法 (69)7.2.1 报警分析 (69)7.2.2 报警关联参数 (75)7.2.3 报警清除 (76)第八章产品规格 (78)8.1驱动器技术规格 (78)8.2 伺服电机规格 (79)8.3 应用建议 (79)附录1参数汇总表 (81)附录2原点方法 (84)L6E系列伺服功能导引第一章概述1.1 产品简介L6E系列交流伺服系统是深圳市雷赛智能控制股份有限公司自主研制的全数字总线式交流伺服系统,基于ETG COE + CANopen DSP402协议,可与支持此标准协议的控制器/驱动器无缝连接。
Zmotion快速入门之EtherCAT通信

Zmotion快速入门之EtherCAT通信本案例采用Zmotion运动控制卡与伺服驱动器进行EtherCAT通信,从而实现对伺服电机的相关控制。
示:将PC通过Ethernet连接至运动控制卡,然后运动控制卡的EtherCAT接至伺服驱动器,伺服驱动器与伺服电机之间通过配套电缆进行连接。
第一次使用时,最好的方式就是看编程手册,并结合官方提供的案例来学习使用。
Zmotion厂家提供的配套资料,我会传到公众号里,需要的小伙伴,可以后台回复Zmotion获取在保证硬件没有问题的前提下(这里主要是指伺服驱动器,至少能够手动转起来),打开ZMC光盘资料\8.PC编程相关\函数库2.1\windows平台\64位库\C#\例程\例程8-总线控制运动中的源程序,运行起来如下所示:这里有两个地方要注意,不然是运行不起来的。
•案例中提供的ECAT初始化.bas文件,最大轴数是32,需要根据实际情况修改,否则会报错,我这里改成16。
•如果伺服没有接限位开关,轴状态应该是30H,表示正负限位报警,需要将正负限位禁用掉,具体操作是通过ZDevelop将FWD_IN 和REV_IN设置为-1,当然后续可以通过代码实现。
这两点注意,伺服电机就应该可以动起来了。
后续的软件开发主要就是封装应用,Zmotion的使用会涉及到两个dll库(zauxdll.dll和zmotion.dll)和一个Zmcaux.cs类文件,提前将这两个dll库复制到根目录下,然后手动将Zmcaux.cs类添加到你的项目中。
创建一个新的Zmotion.cs类,对Zmcaux.cs中的一些方法进行二次封装,便于后续项目的应用。
二次封装的方式每个人都会根据自己的编码习惯,进行不同程度的封装,下面我仅列举部分我的封装方法,仅供参考:建立连接:EtherCAT连接之前需要执行一个bas文件,根据案例中的代码封装如下:/// <summary>/// 初始化卡/// </summary>/// <param name="ipAddress">IP地址</param>/// <param name="file">BAS文件</param>/// <param name="tempstatus">总线初始化完成状态</param>/// <param name="m_BusNodeNum">节点数</param>/// <returns>操作结果</returns>public OperationResult InitCard(string ipAddress, string file, ref float tempstatus, ref int m_BusNodeNum){int error = 0;error = zmcaux.ZAux_OpenEth(ipAddress, out zhandle);if (error == 0){error = zmcaux.ZAux_BasDown(zhandle, file, 1);if (error == 0){//执行初始化StringBuilder buffer = new StringBuilder(10240);//任务1重新运行BAS中的初始化函数error = zmcaux.ZAux_Execute(zhandle, "RUNTASK 1,Ecat_Ini t", buffer, 0);if (error != 0){return new OperationResult(){IsSuccess = true,ErrorMsg = "初始化失败"}IEC_Timer_TON ton = new IEC_Timer_TON(5000);ton.Input = true;while (true){int ret = 0;float Bus_type = 0.0f;float m_BusAxisNum = 0.0f;//读取BAS文件中的变量判断总线类型ret += zmcaux.ZAux_Direct_GetUserVar(zhandle, "BUS_TYPE ", ref Bus_type);// 读取BAS文件中的变量判断总线初始化完成状态ret += zmcaux.ZAux_Direct_GetUserVar(zhandle, "Bus_InitSt atus", ref tempstatus);ret += zmcaux.ZAux_BusCmd_GetNodeNum(zhandle, 0, ref m_BusNodeNum);ret += zmcaux.ZAux_Direct_GetUserVar(zhandle, "Bus_Total Axisnum", ref m_BusAxisNum);bool completed = ret == 0;completed &= tempstatus == 1;completed &= m_BusNodeNum > 0;bool output = ton.Output;if (completed){break;}else if (!output){continue;else{if (tempstatus == -1){return new OperationResult(){IsSuccess = false,ErrorMsg = "正在初始化"};}else{return new OperationResult(){IsSuccess = false,ErrorMsg = "初始化失败"};}}}initedOK = true;return OperationResult.CreateSuccessResult(); }return new OperationResult(){IsSuccess = true,ErrorMsg = "文件下载失败"};}return new OperationResult(){IsSuccess = true,ErrorMsg = "以太网连接失败"};}点位运动:点位运动主要就是根据轴号、速度、加速度、脉冲当量进行正转或反转,代码如下:public OperationResult Move(int axisNo, float scale, float ve l, float acc, bool dir){int error = 0;error += zmcaux.ZAux_Direct_SetUnits(zhandle, axisNo, scal e);error += zmcaux.ZAux_Direct_SetSpeed(zhandle, axisNo, vel );error += zmcaux.ZAux_Direct_SetAccel(zhandle, axisNo, acc );error += zmcaux.ZAux_Direct_Single_Vmove(zhandle, axisN o, dir ? 1 : -1);if (error > 0){return OperationResult.CreateFailResult();}else{return OperationResult.CreateSuccessResult();}}停止运动:停止运动比较简单,调用ZAux_Direct_Single_Cancel指令即可。
tbl-i伺服电机说明书

tbl-i伺服电机说明书
1、首先先测试一下电机,任何电路也不用连接,把电机的三根线任意两根短路在一起,用手转动电机轴,感觉起来有阻力,那就OK。
2、把伺服驱动器按图纸接上电源,通电,驱动器正常,有错误信息显示,对照说明书,是显示了编码器有故障的错误,这个也正常,还没有连接编码器呢。
3、接上编码器,再开机,没有任何错误显示了。
4、按照说明书上设置驱动器。
按说明书上的说明,调整拨动开关,最后把“Servo-ON”拨动以后,电机一下子锁定了,然后旋动电位器,使SPR/TRQR输入引脚有电压,电机转动起来了。
伺服驱动器上的转数达到了1000、2000、3000最后可到4000多转。
说明书上推荐是3000转的,再高速可能会有些问题。
5、重新设置了伺服驱动器,改成“位置控制模式”,把运动控制卡(或者使用MACH3,连接电脑并行口)接到脉冲、方向接口上,电机也转动了!按照500Kpps的输出速率,驱动器上显示出了3000rpm。
正反转都可自行控制。
最后,再调节一下运动控制卡,和做的小连接板。
板子上的LED阵列是为了测试输出用的,插座是连接两相编码器的,另一个插座是输出脉冲方向的,开关、按钮是测试输入的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电机与运动控制卡的连接
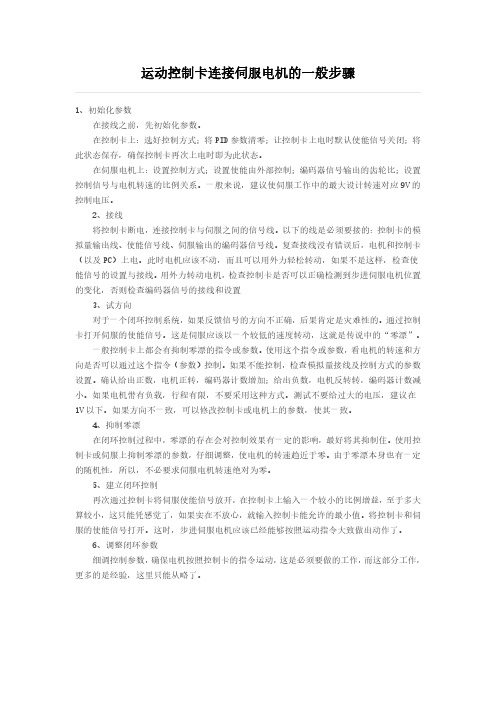
1、初始化参数
2、在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线
将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置
3、试方向
对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂
在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制
再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
将控制卡和伺服的使能信号打开。
这时,电机应该已经能够按照运动指令大致做出动作了。
6、调整闭环参数
细调控制参数,确保电机按照控制卡的指令运动,这是必须要做的工作,而这部分工作,更多的是经验,这里只能从略了。