第6章思考题与习题答案
(完整版)第六章酸碱滴定思考题与习题答案

第6章思考题与习题1.写出下列各酸的共轭碱:H 2O ,H 2C 2O 4,H 2PO 4-,HCO 3-,C 6H 5OH ,C 6H 5NH 3+,HS -。
答:H 2O 的共轭碱为OH -;;H 2C 2O 4的共轭碱为HC 2O 4-;H 2PO 4-的共轭碱为HPO 42-;HCO 3-的共轭碱为CO 32-;;C 6H 5OH 的共轭碱为C 6H 5O -;C 6H 5NH 3+的共轭碱为C 6H 5NH 3;HS -的共轭碱为S 2-;2. 写出下列各碱的共轭酸:H 2O,NO 3-,HSO 4-,S 2-,C 6H 5O -。
答:H 2O 的共轭酸为H +;NO 3-的共轭酸为HNO 3;HSO 4-的共轭酸为H 2SO 4;S 2的共轭酸为HS -;C 6H 5O -的共轭酸为C 2H 5OH3.为什么一般都用强酸(碱)溶液作酸(碱)标准溶液?为什么酸(碱)标准溶液的浓度不宜太浓或太稀?答:用强酸或强碱作滴定剂时,其滴定反应为:H ++OH -=H 2OK c =]][[1OH H =WK 1=1.0×1014(25℃)此类滴定反应的平衡常数K t 相当大,反应进行的十分完全。
但酸(碱)标准溶液的浓度太浓时,滴定终点时过量的体积一定,因而误差增大;若太稀,终点时指示剂变色不明显,故滴定的体积也会增大,致使误差增大。
故酸(碱)标准溶液的浓度均不宜太浓或太稀。
4.HCl 与HAc 的混合溶液(浓度均为0.10 mol ·L -1),能否以甲基橙为指示剂,用0.1000 mol ·L -1NaOH 溶液直接滴定其中的HCl ?此时有多少HAc 参与了反应?解:C 1=0.10mol ?L -1,K a2=1.8×10-5,所以(1)不能以甲基橙为指示剂准确滴定HCl(2)因为甲基橙的变色范围为 3.1~4.4所以当pH=4.0时为变色转折点pH=pKa+lgHA A 4.0=4.74+lg%1.0%x x x%=15%5.判断下列情况对测定结果的影响:(1)用混有少量的邻苯二甲酸的邻苯二甲酸氢钾标定NaOH 溶液的浓度;(2)用吸收了CO 2的NaOH 标准溶液滴定H 3PO 4至第一计量点;继续滴定至第二计量点时,对测定结果各如何影响?答:(1)使测定值偏小。
土力学课后答案详解 第6章

2m 2m 2m
ϕ 1= 30 ° , γ 1= 18 κ Ν /m 3 ϕ 2= 26° , γ 1= 17κ Ν /m 3
ϕ 3= 26° , γ 3= 9κ Ν /m 3
6.21 题 6-1 图
解:
K a1
=
tan 2 (45o
−
ϕ1 2
)
=
tan 2 (45o
−
30o 2
)
压力。 6-3 朗肯土压力理论的基本假设是什么?
答:弹性半空间体内的应力状态,根据土的极限平衡条件而得出的土压力计算方法。在 弹性匀质的半空间体中,任一竖直面应都是对称面,其上的剪应力为零。 6-4 库仑土压力理论的基本假设是什么?
答:①墙后填土是理想的散粒体(粘聚力 c =0);②滑动破裂面为通过墙踵的平面。
第六章 思考题与习题
思考题
6-1 什么是主动土压力、被动土压力和静止土压力?三者的关系是什么? 答:(1)主动土压力:当挡土墙在外力作用下,向土体方向偏移至墙后土体达到极限平
衡状态时,作用在墙背上的土压力称为主动土压力,一般用 Ea 表示。
(2)被动土压力:当挡土墙在外力作用下,向土体方向偏移墙背土体达到极限平衡状
的状态。
当挡土墙离开土体向左移动时,墙后土体有伸张趋势。此时竖向应力σ z 不变,法向应 力σ x 减小,σ z 和σ x 仍为大、小主应力。当挡土墙位移使墙后土体达极限平衡状态时,σ x
达到最小值σ a ,其摩尔应力圆与抗剪强度包线相切。土体形成一系列滑裂面,面上各点都
处于极限平衡状态,称主动朗肯状态,此时墙背法向应力σ x 为最小主应力,即朗肯主动土
墙底:σ p1 = (q + γh)K p = (25 + 16 × 5) × 3.85 = 404.25kPa
有机化学课后习题及答案(第六章)

有机化学课后习题及答案(第六章)6章思考题6.1 试解释实验中所遇到的下列问题:(1)(1)⾦属钠可⽤于除去苯中所含的痕量H2O,但不宜⽤于除去⼄醇中所含的⽔。
(2)(2)为什么制备Grignard试剂时⽤作溶剂的⼄醚不但需要除去⽔分,并且也必须除净⼄醇(⼄醇是制取⼄醚的原料,常参杂于产物⼄醚中)。
(3)(3)在使⽤LiAlH4的反应中,为什么不能⽤⼄醇或甲醇作溶剂?6.2 叔丁基醚[(CH3)3C]2O既不能⽤Williamson法也不能⽤H2SO4脱⽔法制得,为什么?6.3 苯酚与甲苯相⽐有以下两点不同的物理性质:(a)苯酚沸点⽐甲苯⾼;(b)苯酚在⽔中的溶解度较甲苯⼤。
你能解释其原因吗?6.4 解释下列现象(1)(1)从2-戊醇所制得的2-溴戊烷中总含有3-溴戊烷。
(2)(2)⽤HBr处理新戊醇(CH3)2C-CH2OH时只得到(CH3)2CBrCH2CH3。
解答6.1 答(1)⼄醇的活泼氢能与Na发⽣反应,苯与Na⽆反应。
(2)RMgX不仅是⼀种强的亲核试剂,同时⼜是⼀种强碱,可与醇羟基中的H结合,即RMgX可被具活性氢的物质所分解,如(3)LiAlH4既是⼀种强还原剂,⼜是⼀种强碱,它所提供H-与醇发⽣反应,如6.2叔丁基醚⽤H2SO4脱⽔法合成时,主要产⽣烯烃。
6.3 答甲苯和苯酚的相对分⼦质量相近,但是甲苯的沸点110.6℃,⽽苯酚的沸点181.8℃,这是由于苯酚可以形成分⼦间氢键;甲苯不溶于⽔,⽽苯酚易溶于⽔,是由于苯酚与⽔分⼦之间会形成氢键:6.4习题6.1⽐较下列各组化合物与卢卡斯试剂反应的相对速度:(1) 正戊醇, 2-甲基-2-戊醇, ⼆⼄基甲醇(2) 苄醇, 对甲基苄醇, 对硝基苄醇(3)(3)苄醇, α-苯基⼄醇, β-苯基⼄醇6.26.2区别下列各组化合物:(1) CH2=CHCH2OH, CH3CH2CH2OH , CH3CH2CH2Br, (CH3)2CHI(2) CH3CH(OH)CH3, CH3CH2CH2OH , C6H5OH , (CH3)3COH , C6H5OCH3(3) α-苯基⼄醇, β-苯基⼄醇, 对⼄基苯酚, 对甲氧基甲苯6.36.3写出下列各反应主要产物:6.4合成题:(1)(1)甲醇, 2-丁醇→ 2-甲基丁醇(2)(2)正丙醇, 异丙醇→ 2-甲基-2-戊醇(3)(3)甲醇, ⼄醇→正丙醇, 异丙醇(4)(4)2-甲基丙醇, 异丙醇→ 2,4-⼆甲基-2-戊烯(5)(5)丙烯→⽢油→三硝酸⽢油酯(6)(6)苯, ⼄烯, 丙烯→ 3-甲基-1-苯基-2-丁烯(7)(7)⼄醇→ 2-丁醇(8)(8)叔丁醇→ 3, 3-⼆甲基-1-丁醇(9)(9)⼄烯→三⼄醇胺(10)(10)丙烯→异丙醚(11)(11)苯, 甲醇→ 2,4-⼆硝基苯甲醚(12)(12)⼄烯→正丁醚(13)(13)苯→间苯三酚(14)(14)苯→对亚硝基苯酚(15)(15)苯→ 2,6-⼆氯苯酚(16)(16)苯→对苯醌⼆肟6.5某醇C5H12O氧化后⽣成酮,脱⽔则⽣成⼀种不饱和烃, 将此烃氧化可⽣成酮和羧酸两种产物的混合物, 试推测该醇的结构.6.6有⼀化合物(A)的分⼦式为C5H11Br, 和NaOH⽔溶液共热后⽣成C5H12O(B). B具有旋光性.能和钠作⽤放出氢⽓, 和浓硫酸共热⽣成C5H10(C). C经臭氧化和在还原剂存在下⽔解, 则⽣成丙酮和⼄醛. 试推测A, B, C的结构, 并写出各步反应式.6.7新戊醇在浓硫酸存在下加热可⽣成不饱和烃. 将这不饱和烃经臭氧化后, 在锌粉存在下⽔解, 可得到⼀种醛和⼀种酮. 试写出反应历程及各步反应产物的构造式.6.8分离下列各组化合物:(1)(1)⼄醚中混有少量⼄醇(2)(2)戊烷, 1-戊炔和1-甲氧基-3-戊醇6.9 下列各醚和过量的浓氢碘酸反应, 可⽣成何种产物?(1)(1)甲丁醚(2)(2)2-甲氧基⼰烷(3)(3)2-甲基-1-甲氧基戊烷6.10有⼀化合物的分⼦式为C6H14O, 常温下不与⾦属钠反应, 和过量的浓氢碘酸共热时⽣成碘烷, 此碘烷与氢氧化银作⽤则⽣成丙醇. 试推测此化合物的结构, 并写出反应式.6.11 有⼀化合物的分⼦式为C7H16O, 并且:(1)(1)在常温下它不和⾦属钠反应;(2)(2)它和过量浓氢碘酸共热时⽣成C2H5I和C5H11I . 后者与氢氧化银反应⽣成的化合物的沸点为138℃.试推测原化合物的结构, 并写出各步反应式.6.12有⼀化合物的分⼦式为C20H21O4N, 与热的浓氢碘酸反应可⽣成碘甲烷. 当此化合物4.24 mg与氢碘酸反应, 所⽣成的碘甲烷通⼈硝酸银的醇溶液, 得到11.62mg碘化银. 问此化合物含有⼏个甲氧基?6.13 写出环氧⼄烷与下列试剂反应的⽅程式:(1)(1)有少量硫酸存在下的甲醇(2)(2)有少量甲醇钠存在下的甲醇6.14 推测下列反应的机理。
第6章 配位滴定法(课后习题及答案)
第六章 配位滴定法思考题与习题1.简答题:(1)何谓配位滴定法?配位滴定法对滴定反应有何要求?答:以配位反应为基础的地点分析方法称为配位滴定法。
配位滴定法要求配位反应按一定的反应式定量进行,且能进行完全;反应必须迅速;可以用适当的方法确定终点。
(2)EDTA 与其金属离子配合物的特点是什么?答:EDTA 具有广泛的配位性能;EDTA 与金属离子配位时可生成的螯合物稳定性高,配位反应的完全程度高;EDTA 与金属离子形成配位化合物的配位比几乎均为1:1;EDTA 与金属离子形成的配合物大多能溶于水;配位反应迅速;EDTA 与无色离子形成的配合物也无色,便于用指示剂确定终点。
(3)配位滴定可行性的判断条件是什么?答:MYM K c lg ≥6 (4)配位滴定中可能发生的副反应有哪些?从理论上看,哪些对滴定分析有利?答:配位滴定副反应包括:EDTA 的酸效应,金属离子的水解效应,金属离子与其他配位剂的配位反应,干扰离子效应,配合物与氢离子、氢氧根离子的副反应等。
配合物与氢离子、氢氧根离子的副反应对滴定分析有利。
(5)何谓指示剂的封闭现象?怎样消除封闭?答:如果指示剂与某些金属离子形成的配位化合物极其稳定,以至于加入过量的滴定剂也不能将金属离子从金属-指示剂配合物中夺取出来,溶液在化学计量点附近就没有颜色变化,这种现象称为指示剂受到了封闭。
可加掩蔽剂消除指示剂的封闭现象。
(6)提高配位滴定选择性的条件与措施有哪些?答:1)控制酸度;2)分别采用配位掩蔽法、沉淀掩蔽法、氧化还原掩蔽法掩蔽干扰离子;3)分离干扰离子。
2.名词解释(1)酸效应答:由于H+的存在使配位剂参加主反应能力降低的现象。
(2)酸效应系数答:定量表示酸效应进行的程度的系数称为酸效应系数。
(3) 配位效应答:由于存在其他配位剂L 与金属离子M 配位使金属离子参加主反应能力降低的现象。
(4)配位效应系数答:定量表示配位效应进行的程度的系数称为配位效应系数。
通信原理(陈启兴版) 第6章作业和思考题参考答案
基带信号
振荡器 1 f1
反相器
选通开关
相加器
e 2FSK(t)
振荡器 2 f2
选通开关
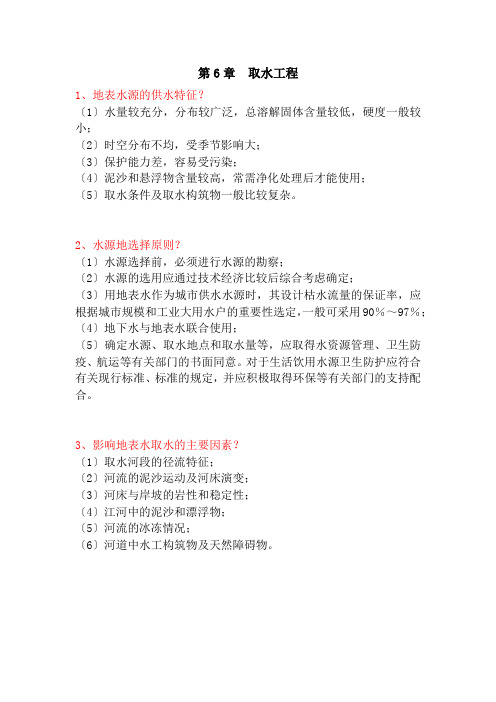
图 6-19 键控法产生 2FSK 信号的原理图
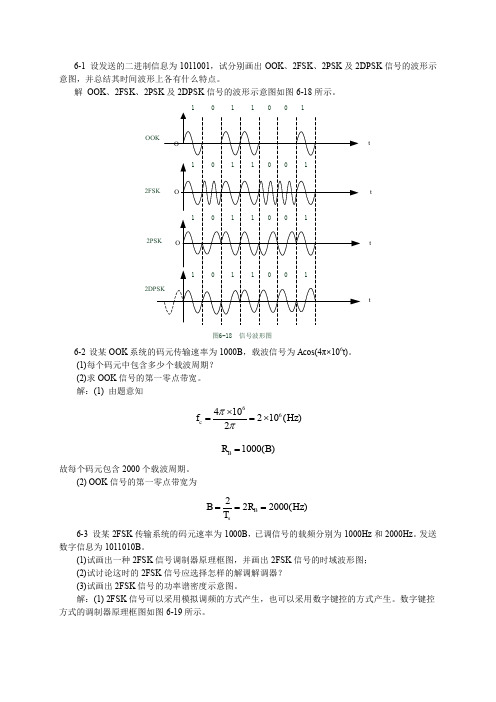
由题意知,码元传输速率 RB=1000B,若设“1”码对应的载波频率为 f1=1000Hz,“0”码对应的载 波频率为 f1=2000Hz,则在 2FSK 信号的时间波形中,每个“1”码元时间内共有 1 个周期的载波,每 个“0”码元时间内有 2 个周期的载波。2FSK 信号的时间波形如图 6-20 所示。【注:实际中键控法的 波形一般不连续。】
B 2RB 2 2106 4(MHz)
此时接收机输入端噪声方差为
输入端信噪比为
2 n
n0 B
6 1018
4106
2.41011(W )
非相干接收时系统的误码率为 (3)相干接收时的误码率为
r
a2
2
2 n
(40106 )2 2 2.41011
33.33
(1)若采用包络检波方式进行解调,试画出各点时间波形; (2)若采用相干方式进行解调,试画出各点时间波形; (3)求 2FSK 信号的第一零点带宽。 解:(1) 2FSK 信号的包络检波原理及其各个时间波形分别如图 6-22 和 6-23 所示。
e2FSK (t)
带通滤波器 1 A f1
包络检波器
Pe
1 2
erfc
r 105
解得信噪比应不小于 所以输入信号功率应不小于
r 9
Si
a2 2
r
2 n
9 4107
3.6106 (W )
(完整版)第六章酸碱滴定思考题与习题答案
第6章思考题与习题1.写出下列各酸的共轭碱:H 2O ,H 2C 2O 4,H 2PO 4-,HCO 3-,C 6H 5OH ,C 6H 5NH 3+,HS -。
答:H 2O 的共轭碱为OH -;;H 2C 2O 4的共轭碱为HC 2O 4-;H 2PO 4-的共轭碱为HPO 42-;HCO 3-的共轭碱为CO 32-;;C 6H 5OH 的共轭碱为C 6H 5O -;C 6H 5NH 3+的共轭碱为C 6H 5NH 3;HS -的共轭碱为S 2-;2. 写出下列各碱的共轭酸:H 2O,NO 3-,HSO 4-,S 2-,C 6H 5O -。
答:H 2O 的共轭酸为H +;NO 3-的共轭酸为HNO 3;HSO 4-的共轭酸为H 2SO 4;S 2的共轭酸为HS -;C 6H 5O -的共轭酸为C 2H 5OH3.为什么一般都用强酸(碱)溶液作酸(碱)标准溶液?为什么酸(碱)标准溶液的浓度不宜太浓或太稀?答:用强酸或强碱作滴定剂时,其滴定反应为:H ++OH -=H 2OK c ===1.0×1014 (25℃)]][[1-+OH H W K 1 此类滴定反应的平衡常数K t 相当大,反应进行的十分完全。
但酸(碱)标准溶液的浓度太浓时,滴定终点时过量的体积一定,因而误差增大;若太稀,终点时指示剂变色不明显,故滴定的体积也会增大,致使误差增大。
故酸(碱)标准溶液的浓度均不宜太浓或太稀。
4.HCl 与HAc 的混合溶液(浓度均为0.10 mol·L -1),能否以甲基橙为指示剂,用0.1000 mol·L -1 NaOH 溶液直接滴定其中的HCl ?此时有多少HAc 参与了反应?解:C 1=0.10mol •L -1 , K a2=1.8×10-5 ,所以(1)不能以甲基橙为指示剂准确滴定HCl(2)因为 甲基橙的变色范围为3.1~4.4所以 当pH=4.0时为变色转折点pH=pKa+lg HAA -4.0=4.74+lg%1.0%x x - x%=15%5.判断下列情况对测定结果的影响:(1)用混有少量的邻苯二甲酸的邻苯二甲酸氢钾标定NaOH 溶液的浓度;(2)用吸收了CO 2的NaOH 标准溶液滴定H 3PO 4至第一计量点;继续滴定至第二计量点时,对测定结果各如何影响?答:(1)使测定值偏小。
水资源利用与保护思考题答案-第六章
第6章取水工程1、地表水源的供水特征?〔1〕水量较充分,分布较广泛,总溶解固体含量较低,硬度一般较小;〔2〕时空分布不均,受季节影响大;〔3〕保护能力差,容易受污染;〔4〕泥沙和悬浮物含量较高,常需净化处理后才能使用;〔5〕取水条件及取水构筑物一般比较复杂。
2、水源地选择原则?〔1〕水源选择前,必须进行水源的勘察;〔2〕水源的选用应通过技术经济比较后综合考虑确定;〔3〕用地表水作为城市供水水源时,其设计枯水流量的保证率,应根据城市规模和工业大用水户的重要性选定,一般可采用90%~97%;〔4〕地下水与地表水联合使用;〔5〕确定水源、取水地点和取水量等,应取得水资源管理、卫生防疫、航运等有关部门的书面同意。
对于生活饮用水源卫生防护应符合有关现行标准、标准的规定,并应积极取得环保等有关部门的支持配合。
3、影响地表水取水的主要因素?〔1〕取水河段的径流特征;〔2〕河流的泥沙运动及河床演变;〔3〕河床与岸坡的岩性和稳定性;〔4〕江河中的泥沙和漂浮物;〔5〕河流的冰冻情况;〔6〕河道中水工构筑物及天然障碍物。
4、地表水取水位置的选择?〔1〕取水点应设在具有稳定河床、靠近主流和有足够水深的地段;〔2〕取水点应尽量设在水质较好的地段;〔3〕取水点应设在具有良好的工程地质条件的地段,并有较好的地形及施工条件;〔4〕取水点应尽量靠近主要用水区;〔5〕取水点应避开人工构筑物和天然障碍物的影响;〔6〕取水点应尽可能不受泥沙、漂浮物、冰凌、冰絮、支流和咸潮等影响;〔7〕取水点的位置应与河流的综合利用相适应,不阻碍航运和排洪,并符合河道、湖泊、水库整治规划的要求。
5、地表水取水构筑物的分类及其适用条件?地表水取水构筑物按其构造形式不同可分为固定式取水构筑物、活动式取水构筑物和山区浅水河流取水构筑物。
固定式取水构筑物:按取水点位置可分为岸边式、河床式和斗槽式。
岸边式适用于河岸较陡,主流近岸,岸边有一定取水水深,水位变幅不大,水质及地质条件较好的情况;河床式适用于河岸较平缓,主流离岸远、岸边缺乏必要取水深度或水质不好的情况;斗槽式适用于河流含沙量大、冰凌严重的情况。
《电力系统分析》第6章习题答案

第六章 思考题及习题答案6-1 电力系统中的无功功率电源有哪些?各有什么特点?答:电力系统的无功功率电源有同步发电机、同步调相机、静电电容器、静止无功补偿器和静止无功发生器等。
同步发电机是最基本的无功功率电源,在额定状态下运行时其发出无功功率为N GN GN S Q ϕsin =,当功率因数变化时,其发出的无功也随之变化,但不能超越P -Q 极限图的范围。
同步调相机是只能发无功功率的发电机,过励磁运行时,向系统供给感性无功功率,起无功电源的作用;欠励磁运行时,从系统吸收感性无功功率,起无功负荷的作用。
欠励磁运行时的容量只有过励磁运行时容量的50%~65%。
静电电容器只能向系统供给感性无功功率,其所供给的无功功率与所在节点电压的平方成正比,在系统发生故障而使电压降低时,其输出的无功功率反而减少。
因此电容器的无功功率调节性能较差,且无法实现输出的连续调节。
静止无功补偿器(SVC )由静电电容器与电抗器并联组成。
电容器可发出感性无功功率,电抗器可吸收感性无功功率,两者结合起来,再配以适当的调节装置,就能够平滑地改变输出或吸收的无功功率。
但SVC 的核心元件是电容器,因此仍存在系统电压降低、急需向系统供应无功功率时,其提供的感性无功功率反而减少的缺点。
静止无功发生器(SVG )的主体部分是一个电压源型逆变器,通过控制逆变器的输出电压来实现无功功率的动态补偿。
与SVC 相比,其最重要的一个优点是在电压较低时仍可向系统注入较大的无功功率。
6-2 发电机的运行极限是如何确定的?答:同步发电机运行范围受以下因素限制:定子额定电流(额定视在功率)的限制;转子额定电流(空载电势)的限制;原动机出力(额定有功功率)的限制。
发电机运行极限图的具体绘制可参考教材图6-3。
6-3 什么叫电压中枢点?一般选在何处?答:在电力系统的众多节点中,通常选择一些主要的供电点加以监视和控制,如果这些节点的电压满足要求,则系统中大部分节点的电压基本上也能满足要求,这些主要的供电点称为电压中枢点。
模拟电子技术基础学习指导及习题解答(谢红主编)第六章思考题及习题解答
第六章思考题与习题解答6-1 要满足下列要求,应引入何种反馈?(1)稳定静态工作点;(2)稳定输出电压;(3)稳定输出电流;(4)提高输入电阻;(5)降低输入电阻;(6)降低输出电阻、减小放大电路对信号源的影响;(7)提高输出电阻、提高输入电阻。
目的复习引入反馈的原则。
解(1)欲稳定静态工作点应引入直流负反馈,因为静态工作点是个直流问题。
(2)稳定输出电压应引入电压负反馈。
输出电压是交流参量,电压负反馈属于交流反馈组态。
在四种交流负反馈组态中,电压串联负反馈和电压并联负反馈均能达到稳定输出电压的目的。
(3)稳定输出电流应引入电流负反馈。
输出电流也是交流参量,在四种组态中,引电流串联负反馈或电流并联负反馈均可。
(4)提高输入电阻应引入串联负反馈,如电压串联负反馈或者电流串联负反馈。
(5)降低输入电阻应引入并联负反馈,如电压并联负反馈或者电流并联负反馈。
(6)降低输出电阻、减小放大电路对信号源的影响是一个减小输出电阻并提高输入电阻的问题,应引入电压串联负反馈。
(7)输入、输出电阻均提高应引入电流串联负反馈。
6-2 负反馈放大电路为什么会产生自激振荡?产生自激振荡的条件是什么?解在负反馈放大电路中,如果把负反馈引的过深会将负反馈变成正反馈,于是自激振荡就产生了。
产生自激振荡的条件是幅度条件相位条件arg AF=±(2n+1)π,n为整数∆=±180°或者附加相移φ6-3 判断下列说法是否正确,用√或×号表示在括号内。
(1)一个放大电路只要接成负反馈,就一定能改善性能。
( )(2)接入反馈后与未接反馈时相比,净输入量减小的为负反馈。
( )(3)直流负反馈是指只在放大直流信号时才有的反馈;( )交流负反馈是指交流通路中存在的负反馈。
( )。
(4)既然深度负反馈能稳定放大倍数,那么电路所用各个元件都不必选用性能稳定的。
( )(5)反馈量越大,则表示反馈越强。
( )(6)因为放大倍数A越大,引入负反馈后反馈越强,所以反馈通路跨过的级数越多越好。
电工学 唐介 第6章 思考题及习题 解答 答案

n0
1500
=0.04
f2 = sf1 = 2 HZ
返 回分析与思考题集
上一题
下一题
第6章 电 动 机
6.2 (4) To、TL、T2 的作用方向相同还是相反? 【答】 To 与 TL 的作用方向相同,但与T2 的作用方向 相反章 电 动 机
6.2 (5) 三相异步电动机在正常运行时,若电源电压下 降,电动机的电流和转速有何变化?
【答】 不能,星-三角减压起动只适用于正常运行时为 角形联结的电动机。
返 回分析与思考题集
上一题
下一题
第6章 电 动 机
6.5 (3) 鼠笼式和绕线式两种转子中,哪一种起动性 能好?
【答】 绕线式起动性能好
返 回分析与思考题集
上一题
下一题
第6章 电 动 机
6.6 (1) 一对极的三相笼型异步电动机,当定子电压的 频率由 40 Hz 调节到 60Hz 时,其同步转速的变化范围是多 少?
【答】 从 2 400 r / min 到 3 600 r / min。
返 回分析与思考题集
上一题
下一题
第6章 电 动 机
6.6 (2) 某多速三相异步电动机,fN = 50HZ,若极对
数由 p = 2 变到 p = 4 时,同步转速各是多少?
【答】 p = 2 时,n0 = 1 500 r/min p = 4 时,n0 = 750 r/min
【答】 电动机在正常运行时,若电源电压下降,将 导致电流升高,而转速下降。
返 回分析与思考题集
上一题
下一题
第6章 电 动 机
6.3 (1) 三相异步电动机在空载和满载起动时,起 动电流和 起动转矩是否相同?
【答】 两者相同。
模拟电子技术基础学习指导与习题解答(谢红主编)第六章 思考题与习题解答

第六章思考题与习题解答6-1 要满足下列要求,应引入何种反馈?(1)稳定静态工作点;(2)稳定输出电压;(3)稳定输出电流;(4)提高输入电阻;(5)降低输入电阻;(6)降低输出电阻、减小放大电路对信号源的影响;(7)提高输出电阻、提高输入电阻。
目的复习引入反馈的原则。
解(1)欲稳定静态工作点应引入直流负反馈,因为静态工作点是个直流问题。
(2)稳定输出电压应引入电压负反馈。
输出电压是交流参量,电压负反馈属于交流反馈组态。
在四种交流负反馈组态中,电压串联负反馈和电压并联负反馈均能达到稳定输出电压的目的。
(3)稳定输出电流应引入电流负反馈。
输出电流也是交流参量,在四种组态中,引电流串联负反馈或电流并联负反馈均可。
(4)提高输入电阻应引入串联负反馈,如电压串联负反馈或者电流串联负反馈。
(5)降低输入电阻应引入并联负反馈,如电压并联负反馈或者电流并联负反馈。
(6)降低输出电阻、减小放大电路对信号源的影响是一个减小输出电阻并提高输入电阻的问题,应引入电压串联负反馈。
(7)输入、输出电阻均提高应引入电流串联负反馈。
6-2 负反馈放大电路为什么会产生自激振荡?产生自激振荡的条件是什么?解在负反馈放大电路中,如果把负反馈引的过深会将负反馈变成正反馈,于是自激振荡就产生了。
产生自激振荡的条件是AF=-1幅度条件AF=1=±(2n+1)π,n为整数相位条件a r g AF或者附加相移φ∆=±180°6-3 判断下列说法是否正确,用√或×号表示在括号内。
(1)一个放大电路只要接成负反馈,就一定能改善性能。
( )(2)接入反馈后与未接反馈时相比,净输入量减小的为负反馈。
( )(3)直流负反馈是指只在放大直流信号时才有的反馈;( )交流负反馈是指交流通路中存在的负反馈。
( )。
(4)既然深度负反馈能稳定放大倍数,那么电路所用各个元件都不必选用性能稳定的。
( )(5)反馈量越大,则表示反馈越强。
无机化学第四版第六章思考题与习题答案

无机化学第四版第六章思考题与习题答案work Information Technology Company.2020YEAR第六章分子的结构与性质思考题1.根据元素在周期表中的位置,试推测哪些元素之间易形成离子键,哪些元素之间易形成共价键。
答:ⅠA、ⅡA族与ⅥA、ⅦA元素之间由于电负性相差较大,易形成离子键,而处于周期表中部的主族元素原子之间由于电负性相差不大,易形成共价键。
2.下列说法中哪些是不正确的,并说明理由。
(1)键能越大,键越牢固,分子也越稳定。
不一定,对双原子分子是正确的。
(2)共价键的键长等于成键原子共价半径之和。
不一定,对双原子分子是正确的。
(3)sp2杂化轨道是由某个原子的1s轨道和2p轨道混合形成的。
×由一个ns轨道和两个np轨道杂化而成。
(4)中心原子中的几个原子轨道杂化时,必形成数目相同的杂化轨道。
√(5)在CCl4、CHCl3和CH2Cl2分子中,碳原子都采用sp2杂化,因此这些分子都呈四面体形。
×sp3,CCl4呈正四面体形;CHCl2和CH2Cl2呈变形四面体形。
(6)原子在基态时没有未成对电子,就一定不能形成共价键。
×成对的电子可以被激发成单电子而参与成键。
(7)杂化轨道的几何构型决定了分子的几何构型。
×不等性的杂化轨道的几何构型与分子的几何构型不一致。
3.试指出下列分子中那些含有极性键?Br2CO2H2O H2S CH44.BF3分子具有平面三角形构型,而NF3分子却是三角锥构型,试用杂化轨道理论加以解释。
BF3中的B原子采取SP2杂化,NF3分子的N原子采取不等性的SP3杂化。
5.CH4,H2O,NH3分子中键角最大的是哪个分子键角最小的是哪个分子为什么 CH4键角最大(109028,),C采取等性的SP3杂化,NH3(107018,), H2O分子中的N、O采用不等性的SP3杂化,H2O分子中的O原子具有2对孤电子对,其键角最小(104045,)。
第6章 脉冲波形的产生与整形思考题与习题题解

思考题与习题6-1选择题(1) TTL单定时器型号的最后几位数字为( A )。
A.555B.556C.7555D.7556(2)用555定时器组成施密特触发器,当输入控制端CO外接10V电压时,回差电压为(B )。
A.3.33VB.5VC.6.66VD.10V(3)555定时器可以组成(ABC )。
A.多谐振荡器B.单稳态触发器C.施密特触发器D.JK触发器(4)若图6-43中为TTL门电路微分型单稳态触发器,对R1和R的选择应使稳态时:( B)图6-43A.与非门G1、G2都导通(低电平输出);B.G1导通,G2截止;C.G1截止,G2导通;D.G1、G2都截止。
(5)如图6-44所示单稳态电路的输出脉冲宽度为t WO=4μs,恢复时间tre=1μs,则输出信号的最高频率为(C)。
图6-44A.fmax=250kHz;B.fmax≥1MHz;C.fmax≤200kHz。
(6)多谐振荡器可产生( B )。
A.正弦波B.矩形脉冲C.三角波D.锯齿波(7)石英晶体多谐振荡器的突出优点是(C)。
A.速度高B.电路简单C.振荡频率稳定D.输出波形边沿陡峭(8)能将正弦波变成同频率方波的电路为(B)。
A.稳态触发器B.施密特触发器C.双稳态触发器D.无稳态触发器(9)能把2 kHz 正弦波转换成 2 kHz 矩形波的电路是(B)。
A.多谐振荡器B.施密特触发器C.单稳态触发器D.二进制计数器(10)能把三角波转换为矩形脉冲信号的电路为(D)。
A.多谐振荡器B.DACC. ADCD.施密特触发器(11)为方便地构成单稳态触发器,应采用(C)。
A.DACB.ADCC.施密特触发器D.JK 触发器(12)用来鉴别脉冲信号幅度时,应采用(D)。
A.稳态触发器B.双稳态触发器C.多谐振荡器D.施密特触发器(13)输入为2 kHz 矩形脉冲信号时,欲得到500 Hz矩形脉冲信号输出,应采用(D)。
A.多谐振荡器B.施密特触发器C.单稳态触发器D.二进制计数器(14)脉冲整形电路有(BC )。
《机电设备维修技术》思考题与习题答案1
第六章思考题与习题答案一、名词解释1.机床几何精度:机床在不运动或运动速度较低时,决定加工精度的各主要零、部件以及这些零、部件的运动轨迹的形位精度。
2.机床运动精度:机床在以工作状态的速度运动时,决定加工精度的各主要零、部件以及这些零、部件的运动轨迹的形位精度。
3. 起重机跨度:是指起重机大车两轨道中心线间的距离。
二、填空题1.机床导轨的种类,按运动形式可分为直线运动导轨和旋转运动导轨两类;按摩擦状态可分为滑动导轨、滚动导轨和静压导轨;按截面形状可分为三角形导轨、矩形导轨、燕尾形导轨和圆柱形导轨。
2.导轨的磨削有砂轮端面磨削和砂轮周边磨削两种基本形式。
3.调整机床安装水平的目的,不是为了取得机床零部件理想的水平或垂直位置,而是为了得到机床的静态稳定性以利以后的检验,特别是那些与零件直线度有关的检验。
4.数控设备接地电缆一般要求其横截面积为5.5~14mm2,接地电阻应小于4~7Ω。
5.数控机床切削精度的检验,又称动态精度检验,它是在切削加工的条件下,对机床几何精度和定位精度的一项综合性考核。
6.工作台超程一般设有两道限位保护,一个为硬限位,而另一为软限位。
若工作台发生软超程时,通过移动工作台即可复位。
7.接通数控柜电源,检查各输出电压时,对+5V电源的电压要求高,一般波动范围应控制在± 5 %。
8.数控机床机械故障诊断的主要内容包括对机床运行状态的识别、预测和监视三个方面的诊断。
9.主轴伺服系统发生故障时,通常有三种形式,即CRT显示报警、硬件指示灯报警和不出现任何报警现象。
10.为了清除油泥,保证灵敏度,可在气动系统的过滤器之后,安装油雾分离器,将油泥分离出来。
此外,定期清洗阀也可以保证阀的灵敏度。
11.TH5840立式加工中心换刀由气动系统完成,如主轴松刀动作缓慢,其原因有气动系统压力太低或流量不足、机床主轴拉刀系统有故障和主轴松刀汽缸有故障。
三、判断题(正确的在题后的括号里画“√”,错误的画“×”)1.即使机床床身导轨较高的制造精度,安装机床时若不精心调整也会产生较大误差。
电力电子应用技术 第5版答案 第6章 思考题和习题
1.试说明PWM控制的基本原理。
答:脉宽调制(PWM)。
控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。
也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次斜波谐波少。
按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。
在采样控制理论中有一个重要的结论,即冲量相等而形状不同的窄脉冲加在具有惯性的环节上,其效果基本相同。
冲量既指窄脉冲的面积。
这里所说的效果基本相同。
是指该环节的输出响应波形基本相同。
如把各输出波形用傅里叶变换分析,则它们的低频段特性非常接近,仅在高频段略有差异。
根据上面理论我们就可以用不同宽度的矩形波来代替正弦波,通过对矩形波的控制来模拟输出不同频率的正弦波。
例如,把正弦半波波形分成N等份,就可把正弦半波看成由N个彼此相连的脉冲所组成的波形。
这些脉冲宽度相等,都等于π/n ,但幅值不等,且脉冲顶部不是水平直线,而是曲线,各脉冲的幅值按正弦规律变化。
如果把上述脉冲序列用同样数量的等幅而不等宽的矩形脉冲序列代替,使矩形脉冲的中点和相应正弦等分的中点重合,且使矩形脉冲和相应正弦部分面积(即冲量)相等,就得到一组脉冲序列,这就是PWM波形。
可以看出,各脉冲宽度是按正弦规律变化的。
根据冲量相等效果相同的原理,PWM波形和正弦半波是等效的。
对于正弦的负半周,也可以用同样的方法得到PWM波形。
2.单极性和双极性PWM调制有什么区别?答:单极性调制时,调制波为正弦波电压,载波在正半周时为正向三角波,负半周时为负向三角波。
主电路输出电压正半周为正向SPWM波形,负半周为负向SPWM波形,其瞬时有三种+U d、0V、-U d。
双极性调制时,调制波为正弦波电压,载波为正负三角波。
主电路输出电压正负SPWM波形,其瞬时有+U d、-U d两种。
3.什么是异步调制?什么是同步调制?二者各有何特点?分段同步调制有什么优点?答:载波信号和调制信号不保持同步的调制方式称为异步调制。
第6章思考题及习题6参考答案
第6章思考题及习题6参考答案一、填空1、AT89S51的串行异步通信口为(单工/半双工/全双工)。
答:全双工。
2. 串行通信波特率的单位是。
答:bit/s3. AT89S52的串行通信口若传送速率为每秒120帧,每帧10位,则波特率为答:12004.串行口的方式0的波特率为。
答:fosc/125.AT89S51单片机的通讯接口有和两种型式。
在串行通讯中,发送时要把数据转换成数据。
接收时又需把数据转换成数据。
答:并行,串行,并行,串行,串行,并行6.当用串行口进行串行通信时,为减小波特率误差,使用的时钟频率为 MHz。
答:11.05927.AT89S52单片机串行口的4种工作方式中,和的波特率是可调的,与定时器/计数器T1的溢出率有关,另外两种方式的波特率是固定的。
答:方式1,方式38.帧格式为1个起始位,8个数据位和1个停止位的异步串行通信方式是方式。
答:方式1。
9.在串行通信中,收发双方对波特率的设定应该是的。
答:相同的。
10.串行口工作方式1的波特率是。
答:方式1波特率=(2SMOD/32)×定时器T1的溢出率二、单选1.通过串行口发送或接收数据时,在程序中应使用。
A.MOVC指令B.MOVX指令C.MOV指令D.XCHD指令答:C2.AT89S52的串行口扩展并行I/O口时,串行接口工作方式选择。
A. 方式0B.方式1C. 方式2D.方式3答:A3. 控制串行口工作方式的寄存器是。
A.TCON B.PCON C. TMOD D.SCON答:D三、判断对错1.串行口通信的第9数据位的功能可由用户定义。
对2.发送数据的第9数据位的内容是在SCON寄存器的TB8位中预先准备好的。
对3.串行通信方式2或方式3发送时,指令把TB8位的状态送入发送SBUF中。
错4.串行通信接收到的第9位数据送SCON寄存器的RB8中保存。
对5.串行口方式1的波特率是可变的,通过定时器/计数器T1的溢出率设定。
审计学课后习题详细答案完整版-第六章 风险评估

第六章思考与练习答案解析目录一、思考题 (1)二、案例分析题 (4)一、思考题1.【解答】风险评估程序,是指注册会计师为了了解被审计单位及其环境,以识别和评估财务报表层次和认定层次的重大错报风险而实施的审计程序。
注册会计师应当实施下列风险评估程序,以了解被审计单位及其环境:(1)询问管理层和被审计单位内部其他人员;(2)分析程序;(3)观察和检查。
2.【解答】为了对被审计单位及其环境进行真正的熟悉和了解,注册会计师应当从下列方面了解被审计单位及其环境:(1)相关行业状况、法律环境和监管环境及其他外部因素;(2)被审计单位的性质;(3)被审计单位对会计政策的选择和运用;(4)被审计单位的目标、战略以及可能导致重大错报风险的相关经营风险;(5)对被审计单位财务业绩的衡量和评价;(6)被审计单位的内部控制。
3.【解答】(1)内部控制的含义内部控制是被审计单位为了合理保证财务报告的可靠性、经营的效率和效果以及对法律法规的遵守,由治理层、管理层和其他人员设计与执行的政策及程序。
可以从以下几方面理解内部控制。
①内部控制的目标是合理保证。
①设计和实施内部控制的责任主体是治理层、管理层和其他人员,组织中的每一个人都对内部控制负有责任。
①实现内部控制目标的手段是设计和执行控制政策及程序。
(2)内部控制的局限性内部控制无论如何设计和执行,都只能为被审计单位实现财务报告目标提供合理保证。
内部控制的固有局限性包括:①在决策时人为判断可能出现错误和因人为失误而导致内部控制失效;①控制可能由于两个或更多的人员串通或管理层不当地凌驾于内部控制之上而被规避;①被审计单位内部行使控制职能的人员素质不适应岗位要求;①被审计单位实施内部控制的成本效益问题也会影响其效能;①内部控制一般都是针对经常而重复发生的业务设置的,如果出现不经常发生或未预计到的业务,原有控制就可能不适用。
4.【解答】在初步计划审计工作时,注册会计师需要确定在被审计单位财务报表中可能存在重大错报风险的重大账户及其相关认定、为实现此目的,通常采取下列步骤:(1)确定被审计单位的重要业务流程和重要交易类别;(2)了解重要交易流程,并记录获得的了解;(3)确定可能发生错报的环节;(4)识别和了解相关控制;(5)执行穿行测试,证实对交易流程和相关控制的了解;(6)进行初步评价和风险评估。
线性代数(大连理工大学)第6章习题答案

思考题6-11)正确。
2)不正确。
=Ax b 有可能无解,例如,1212120030x x x x x x +=⎧⎪-=⎨⎪+=⎩有唯一解,但1212121231x x x x x x +=⎧⎪-=⎨⎪+=⎩无解。
3)正确。
因为()[](,)m r r m =≤≤A A b ,[]()(,)r r =A b A ,所以=Ax b 一定有解. 4)正确。
因为()r m n ≤<A ,所以=Ax 0有非零解.习题6-11.(1)0k =或1k = (2)2k =-2.(1)当0k ≠且2k ≠±时,有唯一解;当0k =或2k =时,无解;当2k =-时,有无穷多个解。
(2)当1k ≠且2k ≠-时,有唯一解;当2k =-时,无解;当1k =时,有无穷多个解。
(3)当0a ≠且a b ≠时,有唯一解;当0a =时,无解;当0a b =≠时,有无穷多个解。
(4)当1k ≠且2k ≠-时,无解;当1k =时,有唯一解;当2k =-时,有无穷多个解。
3. 当2k ≠时,向量b 能由向量组123,,a a a 线性表示。
4.解:方程组123123212302040x x x x x ax x x a x ⎧++=⎪++=⎨⎪++=⎩与方程12321x x x a ++=-有公共解,就是方程组12312321231230204021x x x x x ax x x a x x x x a ++=⎧⎪++=⎪⎨++=⎪⎪++=-⎩ 是有解的。
[]22111011101200110,140031012110101a a a a a a ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=−−→-⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦A b2211101110101010103100013301100011a a a a a a a a ⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥−−→−−→---+⎢⎥⎢⎥⎢⎥⎢⎥---+⎣⎦⎣⎦221110111001010101001100110013300043a a a a a a a a a a ⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥−−→−−→--+--+⎢⎥⎢⎥⎢⎥⎢⎥--+-+⎣⎦⎣⎦当1a ≠且3a ≠时,无解;当1a =时,有无穷多个解;当3a =时,有唯一解。
无机化学第四版第六章思考题与习题答案

第六章分子的结构与性质思考题1.根据元素在周期表中的位置,试推测哪些元素之间易形成离子键,哪些元素之间易形成共价键。
答:ⅠA、ⅡA族与ⅥA、ⅦA元素之间由于电负性相差较大,易形成离子键,而处于周期表中部的主族元素原子之间由于电负性相差不大,易形成共价键。
2.下列说法中哪些是不正确的,并说明理由。
(1)键能越大,键越牢固,分子也越稳定。
不一定,对双原子分子是正确的。
(2)共价键的键长等于成键原子共价半径之和。
不一定,对双原子分子是正确的。
(3)sp2杂化轨道是由某个原子的1s轨道和2p轨道混合形成的。
×由一个ns轨道和两个np轨道杂化而成。
(4)中心原子中的几个原子轨道杂化时,必形成数目相同的杂化轨道。
√(5)在CCl4、CHCl3和CH2Cl2分子中,碳原子都采用sp2杂化,因此这些分子都呈四面体形。
×sp3,CCl4呈正四面体形;CHCl2和CH2Cl2呈变形四面体形。
(6)原子在基态时没有未成对电子,就一定不能形成共价键。
×成对的电子可以被激发成单电子而参与成键。
(7)杂化轨道的几何构型决定了分子的几何构型。
×不等性的杂化轨道的几何构型与分子的几何构型不一致。
3.试指出下列分子中那些含有极性键?Br2CO2H2O H2S CH44.BF3分子具有平面三角形构型,而NF3分子却是三角锥构型,试用杂化轨道理论加以解释。
BF3中的B原子采取SP2杂化,NF3分子的N原子采取不等性的SP3杂化。
5.CH4,H2O,NH3分子中键角最大的是哪个分子? 键角最小的是哪个分子? 为什么?CH4键角最大(109028,),C采取等性的SP3杂化,NH3(107018,), H2O分子中的N、O采用不等性的SP3杂化,H2O分子中的O原子具有2对孤电子对,其键角最小(104045,)。
6.解释下列各组物质分子中键角的变化(括号内为键角数值)。
(1) PF3(97.8°),PCl3(100.3°),PBr3(101.5°)中心原子相同,配体原子F、Cl、Br的电负性逐渐减小,键电子对的斥力逐渐增加,所以键角逐渐增加(2) H2O(104°45'),H2S(92°16'),H2Se(91°)配位原子相同,中心原子的电负性逐渐减小,键电子对的斥力逐渐减小,所以键角逐渐减小7.试用分子轨道法写出下列分子或粒子的分子轨道表示式,并指出其中有哪几种键?是顺磁性、还是反磁性的物质?O 2 O 22- N 2 N 22-O 2和N 2见教材,O 22-和N 22-的分子轨道分别为: O 22-()()()()()()()()()222222222112222222x y z y z s s s s p p p p p σσσσσππππ****⎡⎤⎢⎥⎣⎦具有1个双电子的σ键,是反磁性物质。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
思考题与习题1.步进电动机是数字控制系统中的一种执行元件,其功用是将移或直线位移。
()________变换为相应的角位A.直流电信号C. 计算机信号B.交流电信号D.脉冲电信号2.在步进电机的步距角一定的情况下,步进电机的转速与__ __成正比。
3.步进电动机与一般旋转电动机有什么不同?步进电动机有哪几种?4.试以三相单三拍反应式步进电动机为例说明步进电动机的工作原理.为什么步进电动机有两种步距角?5.步进电动机常用于_________系统中作执行元件,以有利于简化控制系统。
()A.高精度B.高速度C.开环D.闭环6. 步进电动机的角位移量或线位移量与输入脉冲数成__。
7. 步进电动机的输出特性是()A.输出电压与转速成正比B.输出电压与转角成正比C.转速与脉冲量成正比 D.转速与脉冲频率成正比8、如何控制步进电动机输出的角位移、转速或线速度?9、反应式步进电动机与永磁式及感应式步进电动机在作用原理方面有什么共同点和差异?步进电动机与同步电动机有什么共同点和差异?10、一台反应式步进电动机步距角为0.9o/1.8o,问(1)这是什么意思?(2)转子齿数是多少?11.采用双拍制的步进电动机步距角与采用单拍制相比()A.减小一半 B.相同C.增大一半 D.增大一倍12.有一四相八极反应式步进电机,其技术数据中有步距角为1.8°/0.9,°则该电机转子齿数为()A.75B.100C.50D.不能确定13.一台三相反应式步进电动机,采用三相六拍运行方式,在脉冲频率f为400Hz时,其转速n为100r/min,试计算其转子齿数Z R和步距角θ。
若脉冲频率不变,采用三相三拍运行b方式,其转速n 和步距角θ又为多少?1 b114.一台三相反应式步进电动机,其转子齿数Z R为40,分配方式为三相六拍,脉冲频率 f 为600Hz,要求:(1)写出步进电动机顺时针和逆时针旋转时各相绕组的通电顺序;(2)求步进电动机的步距角θ;b(3)求步进电动机的转速n。
15.有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子绕组,测得步进电机的转速为100rpm,已知转子有24个齿。
(5分)求:(1)步进电机的步距角θ(2)脉冲电源的频率 f16.有一台三相反应式步进电机,按A—AB—B—BC—C—CA方式通电,转子齿数为80800Hz,求该电机的步距角和转速。
(6分)个,如控制脉冲的频率为17.为什么步进电机的脉冲分配方式应尽可能采用多相通电的双拍?制18、步进电机带载时的启动频率与空载时相比有什么变化?19、步进电动机连续运行频率和启动频率相比有什么不同?20、步进电动机在什么情况下会发生失步?什么情况下会发生振荡?21、设计一个完整的三相步进电动机的驱动电路,并设计一套单片机的控制程序,包括调速(启动、加速、恒速、减速)及正反转过程。
答案1、D2、脉冲频率3.答:步进电动机一种可由电脉冲控制运动的特殊电动机,可以通过脉冲信号转换控制的方法将脉冲电信号变换成相应的角位移或线位移。
与一般旋转电动机相比,步进电动机不能直接使用通常的直流或交流电源来驱动,而是需要使用专门的步进电动机驱动器。
步进电动机按转矩产生的原理分为a.反应式步进电动机。
b.激磁式步进电动机。
这类步进电动机又分为电磁式与永磁式;c.混合式步进电动机。
同时混合使用前两种方式。
4.答:三相单三拍磁阻式步进电动机的结构如图 6.3a所示:其定子铁心上有六个形状相同的大齿,相邻两个大齿之间的夹角为60o。
每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为—相绕组。
六个电极共构成三相绕组,即相对的UU、WW、VV齿极分别缠有两个相互串联的线圈从而构成三相绕组。
转子有两个磁极。
绕组电路原理如图 6.3b所示。
这种形式的步进电动机即是三相步进电动机。
对三相步进电动机来说,当某一相的磁极处于最大磁导位置时,另外两相必处于非最大磁导位置(如图 6.2b所示即定子与转子小齿不对齐的位置)。
,当定子绕组通电及换相时,将会产生使转子转动的力矩并使转子转动。
根据通电及换相的方法的不同,可以有以下几种转动方式:式为U—V—W—U,的顺序轮流供电且一相通电、两相断电的方式。
此时o流供电,则步进电动机逆时针转动。
称这种方式为“三相三位”或“单三拍”分配方式。
),则称为“三相六位”或2)通电方式为 U—UV—V—VW—W—WU—U, (或反顺序o“三相六拍”。
此时,步进电动机每步为30,步距角减小一半。
3)如果通电方式为UV—VW—WU—UV,,则称为‘双三伯”,步距角仍为60o。
从上可知当通电换向的方式不同,步进机电动机可以有两种步距角。
5、C6、正比7、D8、答:步进电动机的运动是受走步脉冲信号控制的,它的直线位移量或角位移量与电脉冲数成正比,所以电机的线速度或转速与脉冲频率成正比。
通过改变脉冲频率的高低,就可以在很大的范围内调节电机的转速,并能实现快速启动、制动和反转。
9、答:同步电机在同步转动时由定子线圈通过电流产生的磁场吸引转子形成转动所需的作用力,磁场的旋转带动转子的运动,属可变磁阻电动机,在这一方面,与步进电动机是相同的。
不同之处是控制方式上步进电机应归属于他控式,通常采用开环控制,无转子位置反馈。
多用于伺服控制系统,对步距精度要求很高,对效率指标要求不严格,只作电动状态运行。
而开关磁阻电动机则归属于自控式,即在转动时电流的换向要与转子的转动速度相匹配,利用转子位置反馈信号运行于自同步状态,相绕组电流导通时刻与转子位置有严格的对应关系, 并且绕组电流波形的前后沿可以分别独立控制,即电流脉冲宽度可以任意调节。
多用于功率驱动系统,对效率指标要求很高,并可运行于发电状态。
在应用上步进电机基本上都用作控制电机而开关磁阻电机则主要是拖动用电机。
10、答:当以单相通电交替换向的方式驱动时(即整步工作时),步距角是1.8 o,当采用一相通电,两相通电间隔交替驱动方式时(即半步工作时),步距角是0.9o。
根据3600可得,当K=1 及K=2时的步距角o omQK分别是1.8/0.9,设步进电机的相数为3600m,则可得转子齿数Q 。
mK11、A12、C13、解:三相六拍运行因为n=60*f/N/ZR,所以ZR=60*f/N/n=60*400/(2*3)/100=40;θb=360°/N/ZR=360°/(2*3)/40=1.5 °;三相三拍运行n1=60*f/N/Z R=60*400/3/40=200 (r/min);θb1=360°/N/ZR=360°/3/40=3°。
14、解:(2)θb=360°/N/ZR=360°/(2*3)/40=1.5 °;(3)n=60*f/N/Z R=60*600/(2*3)/40=150 (r/min)15、解:(1)θ=360°/N/ZR=360°/(2*5)/24=1.5 °(2)因为n=60*f/N/ZR,所以f=n*N*ZR/60=100*(2*5)*24/60=400(Hz)16、解:θb=360°/N/ZR=360°/(2*3)/80=0.75 °n=60*f/N/Z R=60*800/(2*3)/80=100 (r/min)17.答:使用多相通电的双拍制时可以在任何时刻都至少有一相绕组有电流通过,可以减少转动时的振动,减小步进的角度,增加控制精度,并保持定子对转子的引力不间断。
三相步进电动机两相运行和单相运行的特性不变。
其合成的电磁转矩的幅值Tm仍不变,只是相位落后60o电角度。
但对于更多相的步进电动机,其多相通电时合成的电磁转矩的幅值可以大于单相时的合成转矩,从而可以提高步进电动机的最大转矩。
18.答:由于转动力矩大小有一定范围,其起动加速度也会在一定范围内,过高的起动频率会使转子的转动速度跟不上输入脉冲控制要求的转动速度,从而导致转子转动落后于定子磁场的转速,这种情况称为步进电动机的失步。
失步可能导致步进电动机不能起动或堵转。
电机的启动频率是步进电动机不失步起动的最高频率。
当负载惯量一定时,随着负载的增加,起动频率要下降。
随着起动频率增加,转距下降较慢的是起动频矩特性较好的步进电动机。
19、答:步进电动机的最高起动频率(突跳频率)一般为几百 Hz到三四千Hz,而最高运行频率则可以达到几万Hz。
以超过最高起动频率的频率直接起动,将出现“失步”(失去同步) 现象,有时根本就转不起来。
而如果先以低于最高起动频率的某一频率起动,再逐步提高频率,使电机逐步加速.则可以到达最高运行频率。
20、答:步进电动机起动频率不能过高,当起动频率过高时,由于转动力矩大小有一定范围,其起动加速度也会在一定范围内,过高的起动频率会使转子的转动速度跟不上输入脉冲控制要求的转动速度,从而导致转子转动落后于定子磁场的转速,这种情况称为步进电动机的失步。
当步进电动机的控制脉冲等于或接近步进电动机的振荡频率的1/k(k=1,2,3⋯)倍时,电机就会出现强烈的振荡现象,甚至出现失步或无法工作,这种现象就是低频共振和低频失步现象。
低频失步的原因是转子在步进运动时,由于惯性会在一个步进脉冲到来达到新的位置之后在平衡位置来回摆动,如果步进脉冲的频率恰好符合前述条件,则就会出现振荡。
为了消除这种低频振荡,可以采用的方法除了不允许电机在振荡频率下工作外,还可以通过增加系统阻尼,限制振荡的幅度的方法来减弱振荡的幅度。