“夜通航”船用光电取证跟踪系统解决方案2020.9.28
船舶防碰撞——夜通航船用全景摄像机YTHQJ8CA

船舶防碰撞——“夜通航”船用全景摄像机YTHYJ8C/A 船舶碰撞事故频繁发生,那怎样才能避免碰撞,规避风险呢?这应该是每位航海人都在思考的问题。
船舶安全行驶,防止碰撞,首先要做到遵守《国际海上避碰规则》,将国际避碰规则落实到航海实际当中,不仅要加强船员的航海理论知识学习,更要注重总结经验教训,升级航海装备。
一、航行时遇到其他船舶需进行局面判别,坚持正确瞭望可以充分利用雷达、AIS,电子地图等导航设备进行瞭望,但是导航设备进行瞭望具有一定的局限性,不够直观,船长设船员可在利用导航设备进行监测的同时,通过船用高清摄像机一一“夜通航”船用全景摄像机进行视觉瞭望。
二、判别是否有碰撞的风险是采用所有瞭望手段的意图船舶是否有碰撞危险的判断方法:视觉方位法、雷达电子方位线法、ARPA 标绘法等是船舶驾驶员必须具备的基本能力。
船舶驾驶员充分利用瞭望手段对过往物标进行风险判断。
在驾驶员进行危险判断的时候需注意到船舶方位变化较快,在没有碰撞危险的时候,以下三种情况也可能会引起碰撞事故的发生:1、近距离驶近他船。
2、驶近一艘大型船。
3、驶近大型的拖带船队。
三、判别出有碰撞风险后,需及时采取避碰行为使他船发觉采取的行动能够使他船在安全距离上通过也不会产生误判,以防发生误判产生碰撞风险。
需根据避碰规则禁止向对航船舶做一连串小改动以防他船对本船动态进行错误判断。
四、采取行动前需考虑所在环境的因素,规避其他潜在的风险如观察到他船在避让的过程中有难以操作和有碍避让的情况,需及时与对方进行信息沟通,采取其他有效措施进行避让。
五、实时观察避碰行动,检查行动的效果在避免碰撞一系列行动中还要连续不间断地进行观察,检查行动效果直至船舶脱离碰撞危险。
只是采取避碰行动,如果忽略他船也是一个变化的因素,没有及时检查避碰行动的有效性,那就容易与他船在避碰的过程中发生碰撞。
以上几点船舶防碰撞的要点中,提到了“导航设备进行瞭望具有一定的局限性,不够直观”,怎样才能做到在视觉上全面观察他船呢?“夜通航” YTH-QJ8C/A船用全景摄像机是一款专为船舶防碰撞设计的3200万红外高清高速球型全景摄像机,既可提供360°无死角监控视野,又减少对多个普通摄像机的安装需求。
夜通航船用光电跟踪取证系统打击海上非法倾倒维护海洋开发环境23316

“夜通航”船用光电跟踪取证系统打击海上非法倾倒维护海洋开发环境近几年,珠江口海域海上违法倾倒垃圾呈现递增式增长,海漂垃圾波及港澳水域,已严重影响周边海洋生态环境、渔业生产及海上航行安全,成为影响社会安全的重大隐患。
海上垃圾除了对海洋生态造成直接影响之外,也会让海上渔业蒙受损失。
其中塑料制品等在自然条件下降解需要几十年甚至上百年,在降解过程中,塑料垃圾将不断释放有毒有害物质,污染周围土壤、地下水和附近海域。
塑料垃圾对于海洋生物也是一个巨大的威胁,每年有数以万计的海洋生物因误食塑料制品或被塑料缠绕,造成受伤甚至死亡。
有些垃圾甚至还包含重金属等多种有毒物质,污染海洋的重金属元素主要有汞、镉、铅、锌、铭、铜等,它们在水体中不能被降解,还有一些重金属可在微生物作用下发生各种形态之间的相互转化和富集,形成毒性更强的金属化合物。
然而海上非法倾倒废弃物行为的作案时间短且一般实施时间均在深夜,日常监管和调查取证难度较大。
传统的执法手段,单纯依靠人员'死看硬守’,十分消耗精力,加上违法分子利用夜幕掩护、盯防执法船只等,对海上非法作业的查处难度越来越大、成本越来越高。
由于犯罪团伙夜晚作案,能见度极低,在执法人员追上前时倾倒完垃圾,物证缺失,犯罪嫌疑人一般可以做无罪辩解,相关部门无法认定犯罪事实。
如果执法配备船用光电跟踪取证系统,白天执法时,可利用“夜通航”船用光电跟踪取证系统的高清摄像机对船舶周围几公里甚至十几公里的范围作全方位搜索与监视、录像,黑夜或雾霾情况下使用红外热像仪可快速寻找到目标。
甚至在黑夜、雾霾、雨雪天等恶劣环境,都完整输出清晰的监控图像。
录像便可作为直接的指控证据。
“夜通航”船用光电跟踪取证系统的AI智能识别算法,具备深度自学习功能,可自主识别行人、车辆、船舶等。
实现管辖区的宏观、动态、实时、立体化的综合智能识别监控。
即使海上风浪汹涌,“夜通航”船用光电跟踪取证系统光电舱里高精准的双轴陀螺稳定功能,可以在船只晃动时,光电舱根据陀螺信号,由电机带动进行反方向补偿运动,从而使得光电舱内摄像头基本不受船体摇晃影响,指向依然保持不变,使用户得到清晰稳定的画面。
船用光电取证系统连接图-珠海交通运输局

珠海市交通运输局综合行政执法局船用夜视仪(光电取证系统)参数及要求1 范围技术规格书是适用于执法船的光电取证系统,是设备设计、制造、试验、验收和交付的技术依据,并作为订货合同的附件。
2 引用文件(规范标准)2.1船级社及产品证书船级社:按渔业船舶法定检验规则和中国船级社(CCS)《钢质海船入级规范(2012)》及其修改通报来设计、制造。
产品证书:工厂合格证书2.2规范及标准1、《电气电子产品型式认可试验指南》2、国际海事组织(IMO)《国际海上人命安全公约》(SOLAS) 2004年综合文本及至合同生效前所有颁布的修正案(包括关于GMDSS系统的要求)3、国际海事组织(IMO)《MARPOL 73/78》及所有颁布的修正案,包括附则Ⅰ(含13F,25A)、Ⅳ、Ⅴ和Ⅵ;4、《船舶与海上设施法定检验规则—国内航行海船法定检验技术规则(2011);《渔业船舶检验规则》(2000)及修改通报(2008)5、《海洋渔业船舶法定检验规程》(2003)3 要求3.1概述系统可广泛应用于海事执法船、巡逻船、小型游艇等各种船舶。
适合安装在船甲板,桅杆等开阔的地方,监视远距离海面和船甲板等目标。
系统稳定平台安装在船只的顶甲板上,显控台安装在驾驶室内。
在白天通过高性能彩色CCD摄像系统观察、监视搜索目标;在夜间通过红外热成像系统搜索观察目标,同时系统采用了先进的计算机图像处理及控制技术,能有效的隔离舰船的摇摆,可以对海洋环境、海洋资源和海上船只、漂浮物等进行全天候(24小时)观察、搜索、监视和自动跟踪。
3.1.1组成光电系统主要由目标探测设备和显控设备两部分组成。
探测设备由CCD摄像机、红外热像仪组成;显控设备由监视器、视频跟踪器、操作控制、记录等设备组成。
3.1.2电视摄像机、红外热像仪它们的任务是:通过CCD摄像机和红外热像仪等传感器的成像,为操作人员提供目标的清晰图像和目标位置信息。
3.1.3 显控设备显控设备由计算机、视频跟踪器、显示操作控制、记录等组成。
HEOS-300型船载光电跟踪取证系统

HEOS-300型船载光电跟踪取证系统HEOS-300型船载光电跟踪取证设备产品介绍中船重工第七一七研究所武汉华之洋光电系统有限责任公司二〇一三年一月HEOS-300型船载光电跟踪取证设备1产品概述及主要技术特点HEOS-300型船载光电跟踪取证设备是进行海上搜索跟踪、执法取证的重要设备。
具有全天候、速度快、覆盖面广、视距范围大、图像稳定清晰的特点。
设备主要提供执法调查所需的最直接和直观的证据,即照片和录像资料,它包括了时间,地理位置,范围和事件过程等内容。
调查人员通过已经掌握的证据材料,有针对性地调查相关的船舶、人员和部门,进一步取得有价值的证据,从而确认嫌疑船舶的违法行为成立,以达到惩罚犯罪分子,进行公正执法的目的。
HEOS-300型船载光电跟踪取证设备安装在舰船的顶甲板上,在白天通过彩色CCD电视摄像系统,在夜间通过高性能制冷型红外热成像系统发现、识别和确认目标,对海洋环境、海洋资源和海空目标等进行监视、跟踪和记录取证,达到维护海洋权益,保护海洋环境和资源的目的,并作为海洋执法监察调查取证的依据。
该系统可以根据用户的要求,灵活选配多种规格的光学镜头、CCD摄像机、制冷型红外热像仪和红外镜头,HEOS-300采用了计算机自动控制技术、图像信息处理技术、图像稳定技术、自动跟踪等现代高科技,产品主要技术特点:●采用高端图像传感器和处理模块,提高产品性能;●采用标准化、模块化设计技术,扩展性好,维修方便;●采用“三防”、密封设计技术,利于海上恶劣环境长期使用;●采用先进的图像处理技术、目标跟踪技术,图像稳定清晰;●采用了先进的陀螺伺服稳定技术,有效隔离船摇;●采用彩色、黑白和红外热成像系统,即使在完全漆黑的夜晚,也能发现和识别目标;●提供RS-485、以太网和多路标准视频接口;●中国船级社(CCS)认证。
HEOS-300型船载光电跟踪取证设备于2006年获得中国船级社型式认可,装船产品均提供CCS产品证书。
不容忽视的船舶火灾——智能光电预警系统在船舶上的应用

不容忽视的船舶火灾——智能光电预警系统在船舶上的应用随着船舶科技化、智能化的发展,各种电气设施越来越多地步入各种船舶的多个领域。
同时它也因各种原因诱发了大量的火灾隐患,其造成的人员伤亡及经济损失触目惊心!电气火灾造成的原因主要有:漏电、短路、过载、接触电阻过大。
肉眼检查往往难以发现,这就迫切需要建立一套科学、准确、可操作的电气消防预警、安全检测方法、手段。
在船舶的防入侵方面,利用智能光电预警系统的夜视、高清可见光及视频智能分析功能可以完全满足此要求。
智能光电预警系统的消防应用船舶由于受各类电气产品质量、机械设备磨损或运行管理等方面存在的问题,在使用过程中,机械设备、电气设备和线路运行中可能存在某些电气事故隐患和电气火灾隐患,极易酿成火灾,造成惨重的财产损失和重大的人员伤亡。
因此,在防火安全检查中,用智能光电预警系统对机械设备、电气设备和线路进行电气安全检测,可以有效地防止和减少电气火灾的发生。
“夜通航”智能光电预警系统由红外热像仪、可见光摄像机和机壳组成。
红外热成像运用光电技术检测物体热辐射的红外线特定波段信号,将该信号转换成可供人类视觉分辨的图像和图形,并可以进一步计算出温度值。
由此人们可以利用红外热成像看到物体表面的温度分布状况。
红外热成像不受烟云雨雾的干扰,在较恶劣的天气环境下正常使用。
红外线热成像是反映物体表面温度而成像的技术,除了夜间可以作为现场监控使用外,还可以作为有效的防火预警设备。
在传统的防火实践中,用现有普通监视系统,很难发现隐性火灾苗头,采用红外热成像技术则可以快速发现高温易燃点,并将现场情况迅速传回预警系统实施报警,真正做到提前预警火灾险情,把火灾消灭在萌芽阶段。
由于智能光电预警系统不仅能测知物体表面温度,而且能显示物体的温度分布情况,形成所谓的“热图”,可提供物体自身温度状态及升温过程的信息,因此智能光电预警系统还被用于对舰船一些电器或机械设备进行温度监测,获得电器或机械设备各个部位的温度变化情况,发生超过预设阈值自动报警,并显示最高温度或发生报警位置的图像,可以直观、准确判定这些火灾的位置和范围,以此判定电气火灾隐患的存在部位和严重程度,及时采取措施排除隐患,做到早知道早预防,早扑灭。
船用光电跟踪监视系统在救助船舶的应用

1船用光电跟踪监视系统性能介绍船用光电跟踪监视系统视频来源有两路,一路是CCD摄像机,另一路是红外热像仪。
CCD摄像机装备了一支10-37倍变焦镜头,在白天能见度良好的情况,可以观察10km以内的目标,在1km范围内可以看清相当于船名船号大小的字体。
在早上有较浓雾的情况下,可以观察2km左右的目标,对于400m以内可以看到船名船号。
晚上可以对数百米范围内的目标进行搜索和观察。
红外热像仪配备了一支定焦镜头,可用于全天候搜索和观察目标。
夜间,在没有灯光的前提下,通过红外热成像仪可以分辨600m左右范围内的人形。
该系统具有良好的视轴稳定、电动变焦、调焦等光学调整功能。
当船体纵横摇≥±10°而≤±22.5°,周期大于6秒时,视频基本能正常工作。
2船用光电跟踪监视系统在救助船舶的应用(1)搜救跟踪。
船用光电跟踪监视系统有利于水上搜救和跟踪。
因为该系统是利用光学作用,不需要依靠雷达放射面,抗干扰能力强,对于搜索木质的渔船、落水人员等具有比雷达搜索更大的优势。
还可对远距离的物标进行探测、搜索和辨认。
红外热成像系统原理是根据物标温差成像,根据人体体温或机器的热量与海水之间的温差,可以使搜救人员在恶劣天气或者能见度不良的情况下,也能找到遇险者或遇险目标的方位。
以往在恶劣天气和能见度不良情况下的海上搜救一直依靠目测和雷达搜索,该系统为我们提供了一种新搜寻的手段。
另外,该系统可昼夜完成对本船周边海上目标作全方位搜索、观察和图像监视,对需要长期监视的目标还可转入雷达指引或自动跟踪状态,提高了搜救效率,减轻了工作强度。
(2)影像。
船舶在救助船舶救助时,一般由政委手持数码相机和DV进行现场拍照和录制视频,但是数码相机和摄像机在船舶上使用时,有相当大的局限性。
数码相机和摄像机对对拍摄静态图像和固定场景有较好的效果,但是遇到大风浪时往往拍摄效果不理想。
救助船舶救助时经常是大风浪情况,船舶晃动剧烈,相机拍出来的图相通常是模糊清晰或有重影,摄像机拍摄的影像,镜头在近水面和天空间来回摆动;夜间使用时更是难以得到理想的图像效果。
舰船光电跟踪取证视频监控仿真系统设计综述

图1 舰船光电跟踪取证视频监控仿真系统
视频区显示4个监视屏,每个预览窗口占1/4预览区,每个预览区的上方会显示当前时间,时间的右侧有一个“全屏显示”按钮,单击便可全屏显示某一区域,从而对重点区域进行观测,该区域的作用主要是通过视频影像的方式对所监控的区
域进行呈现。
设备控制包含手控杆控制、跟踪控制、电视、激光、红外控制几个部分,该区域可根据观察者的实际需要,对所监控目标的影像进行调整,仿真界面设计如图2所示。
图2 设备控制仿真界面
图3 红外控制界面仿真
设计手控杆控制时可以简化为如图2所示的箭头模式,用于控制转台向上、下、左、右、上左、下左、上右、下右
图4 雷达目标
转台控制用于显示静态界面,如图5所示。
图5 转台控制仿真界面
结束语
海警在维权执法过程中需要熟练操作光电跟踪监视系统,以便及时跟踪嫌疑目标,固定图像及音频数据作为关键证据。
在动用舰艇训练时所需费用大,台套数较少也限制了培训的效率。
基于舰艇综合仿真训练系统开展维权执法模拟训练,在训
科学与信息化2020年3月上。
基于光斑跟踪的夜间航行船舶跟踪方法

㊀第43卷第4期㊀2020年12月中㊀国㊀航㊀海NAVIGATIONOFCHINAVol.43No.4㊀Dec.2020㊀收稿日期:2020 ̄06 ̄28基金项目:国家自然科学基金(52071247ꎻ52071091)作者简介:王群朋(1987 )ꎬ男ꎬ河南开封人ꎬ硕士ꎬ讲师ꎬ研究方向为智能航海与图像处理ꎮE ̄mail:wqp2016@gzmtu.edu.cn通信作者:张明阳(1993 )ꎬ男ꎬ河南周口人ꎬ博士生ꎬ助理研究员ꎬ研究方向为大数据分析与数据可视化ꎮE ̄mail:mingyang.0.zhang@aalto.fi文章编号:1000-4653(2020)04-0052-07基于光斑跟踪的夜间航行船舶跟踪方法王群朋1ꎬ㊀张金水1ꎬ㊀赵银祥2aꎬ2bꎬ㊀张明阳3(1.广州航海学院海运学院ꎬ广州510725ꎻ2.武汉理工大学a.智能交通系统研究中心ꎻb.国家水运安全工程技术研究中心ꎬ武汉430063ꎻ3.阿尔托大学工程学院ꎬ艾斯堡芬兰20110)摘㊀要:针对当前普通摄像头对夜间航行船舶检测研究方面的不足ꎬ提出一种基于光斑检测和跟踪的方法ꎬ实现夜间航行船舶检测ꎮ采用边缘检测算子(LaplacianofGaussianꎬLOG)对视频图像光斑进行检测ꎬ采用阈值化方法对光斑进行过滤ꎻKalman滤波算法对多光斑目标进行跟踪ꎬ通过对光斑进行标记ꎬ判断光斑的属性ꎬ从而实现光斑的新增和删除ꎮ以实际夜间船舶航行监控视频为例进行方法验证ꎬ结果表明:该方法能对夜间船舶进行有效检测和跟踪ꎬ从而验证采用光斑跟踪的方法能提高夜间船舶的检测精度ꎮ关键词:船舶跟踪ꎻ光斑检测ꎻ卡尔曼滤波ꎻ夜间监控视频中图分类号:U692.4㊀㊀㊀文献标志码:ATrackingShipImagesinNightSurveillanceVideoBasedonLightSpotTrackingWANGQunpeng1ꎬ㊀ZHANGJinshui1ꎬ㊀ZHAOYingxiang2aꎬ2bꎬ㊀ZHANGMingyang3(1.SchoolofNavigationꎬGuangzhouMaritimeUniversityꎬGuangzhou510725ꎬChinaꎻ2a.IntelligentTransportSystemsResearchCenterꎻ2b.NationalEngineeringResearchCenterforWaterTransportSafetyꎬWuhanUniversityofTechnologyꎬWuhan430063ꎬChinaꎻ3.SchoolofEngineeringꎬAaltoUniversityꎬEspoo20110ꎬFinland)Abstract:Lightspotdetectionandtrackingthatenhancesordinarymonitoringsystemisproposedfornormalcamerasachievingshipmonitoringinnighttime.ThelightspotsinthevideoimagesaredetectedthroughLOG(LaplacianofGaussian)operatorprocessingandthreshold ̄filtering.TheyaresubsequentlytrackedbyaKalmanfilterandeachlightspotismarkedaccordingtoitsattributeswhichdetermineswhetherthelightspotshouldbeacceptedordiscarded.Theaccuracyofthemethodisverifiedwithactualmarinesurveillancevideoinnighttime.Improvementofthedetectionandtrackingofshipsisdemonstrated.Keywords:shiptrackingꎻlightspotdetectionꎻKalmanfilterꎻnighttimesurveillancevideo㊀㊀提高船舶检测和跟踪技术对于保障船舶安全航行㊁减少海事事故和实现船舶信息化管理而言具有重要意义ꎮ[1]船舶检测和跟踪的方法繁多ꎬ检测设备复杂多样ꎬ例如雷达㊁船舶自动识别系统(AutomaticIdentificationSystemꎬAIS)和视频装置等ꎮ在特殊环境下ꎬ各种类型设备的监控效果都会受到影响ꎬ例如夜间环境能见度低ꎬ视线模糊ꎬ虽然雷达能助航ꎬ但雷达目标不够直观ꎬ无法判断目标的种类[2]ꎬAIS信号易丢失且易受船载设备的影响ꎮ[3]针对夜间海事监控存在的不足ꎬ提出一种基于视频图像处理的夜间船舶检测和跟踪方法ꎬ进一步为船舶夜间航行监管提供技术支持ꎮ传统的夜间船舶检测方法可分为红外摄像头㊁合成孔径雷达(SyntheticApertureRadarꎬSAR)和卫星检测等3类ꎮ首先ꎬ利用红外摄像头较强的适应能力进行夜间船舶检测ꎮLIU等[4]通过在桥墩上搭建平台㊁架设红外摄像头构建船桥碰撞报警系统ꎬ能实现白天和夜间的船舶检测ꎮLIU等[5]为实现港口全天候船舶异常行为检测ꎬ避免船舶发生被偷事件ꎬ采用红外摄像头进行港口船舶检测ꎬ并运用SAR进行全天候船舶检测ꎮTELLO等[6]和MARINO[7]分别采用小波变换和陷波滤波器进行SAR图像船舶检测ꎬ但因SAR能量消耗较高ꎬ无法保证对夜间船舶航行的持续监控ꎬ该方式主要应用于渔业检测和漏油管理中ꎻ同时ꎬ运用卫星图像进行渔船检测ꎬ主要利用渔船灯光进行船舶检测ꎬ最早为操作线性扫描系统ꎬ后来发展为可视红外成像辐射系统ꎬ通过可视红外成像辐射系统(VisibleInfraredImagingRadiometerSuiteꎬVIIRS)采集昼夜波段(Day/NightBandꎬDNB)数据ꎮELVIDGE等[8]设计DNB数据船舶检测系统ꎻYAMAGUCHI[9]基于DNB数据和BT3.7提出船舶交通流密度评估算法ꎬ但该类夜间船舶检测方法主要针对渔船检测ꎬ在其他情景中应用较少ꎮ目前ꎬ采用视频实现船舶检测的应用领域包括复杂码头运动船舶监控[10]㊁渔业监管中船舶监控[11]㊁控制河段船舶违章航行检测[12]和基于视频的船舶流量统计[13]等ꎮ在视频船舶检测方法中ꎬ主要有基于传统图像处理的方法ꎬ如Vibe背景检测算法[14]㊁基于卷积神经网络的方法[15]和采用Opencv[16]或DirectShow[17]等软件技术的监控方法ꎮ然而ꎬ这些船舶检测方法均依靠视频图像中船舶的特征进行检测ꎬ不适合对夜间航行的船舶进行特征检测ꎮ综上所述ꎬ当前针对夜间视频船舶检测方法的研究较少ꎬ需进一步研究如何在夜间采用普通摄像头捕捉运动船舶并对其进行动态跟踪ꎮ借鉴实时交通信号灯检测方法[18]ꎬ船舶在夜间航行时开启船灯ꎬ考虑对船灯进行检测并跟踪ꎬ以实现对夜间船舶的检测和跟踪ꎮ夜间航行船舶的检测和跟踪包含船灯检测和跟踪2步ꎮ夜间航行船舶船灯检测即边缘检测ꎬ边缘检测算子可分为一阶微分算子(LaplacianofGaussianꎬLOG)(例如:Prewitt和Sobel算子)和二阶微分算子ꎮ陈娟等[19]对多个LOG的应用进行分析ꎬ提出边缘检测方法需根据不同图像类型和应用场合进行选择ꎮ常用的一阶微分算子(如Roberts算子和Laplacian算子)运算简单ꎬ但抗干扰性能较差ꎬ且会在边缘检测到噪声ꎬ适用性有限ꎻCanny算子在性能上优于LOG算子ꎬ但在相同尺度下定位和执行效率具有一定的局限性ꎮ[20]常用的目标跟踪算法包括光流跟踪㊁MeanShift跟踪算法和Kalman滤波等ꎮ对船舶的检测多采用线性Kalman滤波[21 ̄22]ꎬ由于一般图像序列中相邻帧的时间间隔通常很小ꎬ船舶航行状态难以发生明显变化ꎬ特别是在受限水域或其他特殊航行环境下ꎬ基本可认为船舶匀速运动ꎬ即目标在视频中具有连续性的特征ꎬ从而满足Kalman滤波模型ꎮ基于上述分析ꎬ本文采用LOG算子进行船舶灯光检测并使用Kalman滤波进行光斑跟踪ꎮ通过实际夜间船舶航行视频分析ꎬ研究夜间船舶检测和跟踪方法ꎮ本文主要创新之处在于:1.提出通过对船舶船灯进行检测和跟踪的方法ꎬ实现对夜间航行船舶的跟踪ꎮ2.采用LOG算子对船舶灯光进行检测ꎬ并结合光斑阈值过滤方法ꎬ提高船舶光斑检测的有效性ꎮ1㊀问题分析1.1㊀夜间船舶跟踪当前夜间船舶主要依靠红外摄像头㊁SAR和卫星检测ꎬ但各类方法存在费用较高和无法持续性检测等问题ꎬ同时受适用范围的限制ꎬ在部分水域无法适用ꎮ普通的摄像头广泛应用于视频检测中ꎬ然而船舶夜间航行难以对船舶本身进行识别ꎬ尤其是在航行环景复杂时ꎬ难以提取船舶图像的特征ꎬ因此很少应用于夜间船舶检测ꎮ1.2㊀船灯检测夜间船舶跟踪可基于对船舶灯光的检测和跟踪转化为边缘检测ꎬ在夜间船舶航行视频中对船舶灯光进行检测时ꎬ由于视频背景为江岸居民生活区而存在光斑ꎬ会干扰对船舶灯光的检测ꎮ同时ꎬ江水对船舶灯光的反光效果也会对检测结果产生消极影响ꎮ船灯检测算子需具备较强的抗干扰性能ꎮ此外ꎬ同一艘船舶多个船灯之间较近ꎬ需要保证光斑的检测准确性ꎮ1.3㊀研究动机针对当前夜间航行船舶跟踪主要依靠红外摄像头和雷达等问题ꎬ为弥补采用普通摄像头实现的不足ꎬ提出一种基于光斑跟踪的夜间船舶航行跟踪方法ꎮ当船舶航行时ꎬ船灯点亮ꎬ随着船舶移动ꎬ因此将对船舶的跟踪转换为对船灯的跟踪ꎬ完成基于普通摄像头的夜间船舶航行跟踪ꎮ在船灯检测中ꎬ受沿岸生活区灯光和船灯在水面反光的影响ꎬ采集的图像中包含其他无效光斑ꎮ在通过LOG算子对光斑进行准确检测的基础上ꎬ结合试验方法设置光斑阈值对无效光斑进行过滤ꎬ以保证船灯检测效果ꎮ35㊀㊀王群朋ꎬ等:基于光斑跟踪的夜间航行船舶跟踪方法2㊀算法2.1㊀算法框架船舶灯光检测跟踪方法流程包括图像预处理㊁光斑检测和光斑跟踪等部分ꎬ见图1ꎮ通过输入船舶航行监控视频ꎬ获取视频帧图像ꎬ在预处理(包括图像裁剪和灰度化)的基础上ꎬ先对光斑进行检测ꎬ根据光斑检测结果(光斑在图像中的X/Y坐标)对光斑进行跟踪ꎬ获取船舶夜间航行轨迹ꎮ该过程主要包括光斑检测和光斑跟踪2步ꎮ1)在夜间视频灰度图像中检测所有光斑ꎬ从夜间航行视频中检测到的灯光可能包含岸边建筑物或桥灯灯光ꎬ因此需对光斑进行过滤ꎮ本文首先选择LOG算子[23]作为边缘检测算子进行灯光检测ꎬ再根据光斑的灰度值对光斑进行阈值过滤ꎬ尽可能地保留船灯光斑ꎮ2)对光斑进行跟踪ꎮ由于在同一帧图像中不同的船舶有各自的船灯ꎬ且同一艘船舶可能有多个船灯ꎬ因此需要对多个目标进行跟踪ꎮ本文采用Kalman跟踪方法[21]对多运动目标进行跟踪ꎬ以实现对运动船舶的跟踪ꎮ2.2㊀船舶灯光检测船灯检测即光斑检测ꎬ可进一步将光斑检测转化为图像边缘检测ꎬ本文采用LOG算子进行边缘检测ꎮMarr和Hildreth将高斯滤波与拉普拉斯算子相结合形成LOGꎬ其充分利用高斯函数减小噪声点ꎬ并借助拉普拉斯模板使检测到假边缘的概率减小ꎮ[19]LOG算子为LOG=σ2Δ2G(1)式(1)中:σ为高斯函数空间标准差ꎻΔ2为拉普拉斯算子ꎻG为高斯函数ꎮ㊀㊀然而ꎬ由于图像中受到其他沿岸灯光和船灯在江面的反光等干扰ꎬ需保证船灯检测效果ꎮ考虑到沿岸灯光和水面反光光斑亮度会受距离等因素的影响ꎬ光斑亮度低于船灯ꎬ可通过设置光斑阈值对光斑进行过滤ꎮ因此ꎬ光斑检测主要流程包括:使图像灰度化ꎬ并进行LOG算子检测ꎻ对图像光斑阈值进行过滤ꎻ进行最大值滤波和背景检测ꎬ从而检测图像峰值ꎬ判断光斑的中心位置和和半径ꎻ根据光斑重叠面积占光斑自身面积的比例判断光斑重叠情况ꎻ输出光斑和图像ꎮ光斑检测算法流程见图2ꎮ2.2.1㊀图像尺度变换摄像头采集原始图像为RGB图像ꎬ首先需将图像转为灰度图像ꎮ由于光斑尺度未确定ꎬ可采用不图1㊀基于光斑跟踪的夜间航行船舶跟踪流程图2㊀光斑检测算法流程同尺度滤波器对图像进行边缘检测ꎮ滤波器尺度取决于卷积核参数σꎬ因此构建等间隔向量用于不同尺度滤波器中ꎮ2.2.2㊀LOG光斑检测分别在水平方向和垂直方向上进行高斯卷积运算和高斯 ̄拉普拉斯卷积运算ꎬ并对2个方向上的计算结果进行求和运算ꎮ具体过程为:首先对垂直方向进行高斯拉普拉斯卷积运算ꎻ其次对水平方向进行高斯卷积运算ꎬ并将卷积运算后的图像在水平方向进行高斯卷积运算ꎻ接着在水平方向进行高斯拉普拉斯卷积运算ꎻ最后对2个方向上的卷积运算结果进行求和运算ꎮ2.2.3㊀光斑阈值判断由于夜间内河视频图像中包含建筑灯光等背景灯光ꎬ因此需对检测到的非船舶光斑进行过滤ꎮ通过设置灰度值阈值进行判断:若阈值过小ꎬ则检测到光斑包含其他类型的灯光ꎬ从而导致光斑数量过多ꎬ难以有效跟踪ꎻ若阈值过大ꎬ则检测光斑数量过少ꎬ无法实现船舶检测和后续跟踪ꎮ阈值的大小影响光斑的数量和检测精度ꎬ由于无法事先确定各类光斑间的差异ꎬ拟通过试验的方法确定阈值ꎮ2.2.4㊀峰值检测峰值检测在于获取光斑的中心位置和半径ꎬ包含最大值滤波㊁背景检测和图像腐蚀等3步ꎮ(1)图像阈值判断后图像光斑较小ꎬ采用最大值滤波增大光斑ꎬ最大值滤波的原理是用卷积核最大像素值替代中心像素值ꎬ从而有效放大原始光斑ꎮ(2)根据最大值滤波前后图像数据的对比结果ꎬ区分船舶光斑和背景ꎬ即将最大值滤波后像素值发生变化的情况取值为0ꎬ否则取值为1ꎮ(3)根据背景检测结果对图像背景进行腐蚀ꎬ获取光斑实际大小ꎻ对最大值滤波后的结果与腐蚀后背景图像做差ꎬ得出船舶光斑中心位置和光斑的45㊀中㊀国㊀航㊀海2020年第4期半径ꎮ2.2.5㊀光斑重叠判断光斑重叠判断规则如下:首先计算2个光斑半径之和rsum㊁半径之差的绝对值rdiff和2个光斑中心点之间的距离dꎮ若dɤrdiffꎬ说明小光斑位于大光斑圆环内ꎬ可不考虑小光斑ꎻ若rsumɤdꎬ说明不存在重叠ꎬ否则计算2个光斑之间的重叠面积ꎮ光斑重叠面积计算示意见图3ꎬ其中:r1㊁r2和d分别为2个光斑的半径和光斑中心之间的距离ꎻ在此基础上ꎬ分别计算重叠区域面积与各光斑面积的比值ꎬ若该比值大于设定阈值(本文初始取0.1)ꎬ则认为该光斑存在重叠ꎮ光斑重叠区域面积计算流程伪代码如下:图3㊀光斑重叠面积计算示意㊀㊀Inputs:x1ꎬy1ꎬr1ꎬx2ꎬy2ꎬr21:d=(x1-x2)^2+(y1-y2)^2ꎬrsum=r1+r2ꎬrdiff=r1-r22:ifdɤrdiffꎬthen3:area=πˑr2ˑr24:elseifdȡrsum5:area=06:else7:θ1=acosˑ((d2+r1-r2)/2ˑr1ˑd)8:θ2=acosˑ((d2+r2-r1)/2ˑr2ˑd)9:area=2ˑ(0.5ˑr1^2ˑθ1+0.5ˑr2^2ˑθ2-0.25ˑ(d+r1+r2)ˑ(r1+r2-d)ˑ(r1+d-r2)ˑ(r2+d-r1))10:endif2.3㊀船舶灯光跟踪在实现视频光斑检测之后ꎬ采用Kalman滤波对光斑进行跟踪ꎮ由于在视频图像中检测到的光斑数量较多ꎬ需对多个光斑进行跟踪ꎮ对单帧图像中检测到的光斑依次循环进行Kalman滤波单目标跟踪ꎬ即可实现滤波多目标跟踪ꎮ[24]2.3.1㊀Kalman滤波船舶在规定的航道内航行时ꎬ其航行状态主要受航速的影响ꎬ同时船舶在相邻帧短时间内具有连续性特征ꎬ因此可构建船舶的位置和航速状态向量ꎬ基于线性Kalman滤波模型进行跟踪ꎮ以单个光斑跟踪为例ꎬ假设:xk和yk分别为k时刻光斑中心所在位置ꎻvx和vy分别为x和y方向上的速度ꎻax和ay分别为x和y方向上的加速度ꎮ定义用来描述运动目标状态的向量为Xk=xkꎬykꎬvxꎬvy[]T(2)观测向量Zk为Zk=xkꎬyk[]T(3)㊀㊀由此确定状态转移矩阵Aꎬ控制输入矩阵Bꎬk时刻对系统的控制量Uk㊁系统测量矩阵H及其对应的协方差矩阵为A=10dt0010dt00100001éëêêêêêùûúúúúúꎬB=dt2/200dt2/2dt00dtéëêêêêêùûúúúúúꎬUk=axayéëêêùûúúꎬH=10000100éëêêùûúúꎬQ=P0=dt4/40dt3/200dt4/40dt3/2dt3/20dt200dt3/20dt2éëêêêêêùûúúúúúˑσ1ꎬR=σx00σyéëêêùûúú(4)当确定Kalman滤波参数以后ꎬ采用Kalman滤波实现目标跟踪的过程如下:首先对下一刻的状态进行预测并计算协方差矩阵ꎬ有Xᶄk+1=AˑXk+BˑUkPk+1=AˑPkˑAT+Q{(5)㊀㊀通过更新加入观测值校正以后ꎬ得到状态变量值矩阵和协方差矩阵ꎬ有Xk+1=Xᶄk+1+Kk+1ˑ(Zk+1-HˑXᶄk+1)Pk+1=Pᶄk+1-Kk+1ˑHˑPᶄk+1{(6)㊀㊀Kalman增益计算为Kk+1=Pᶄk+1ˑHTˑHPᶄk+1HT+R()-1(7)㊀㊀经过式(5)和式(6)的预测和更新ꎬ可得到下一时刻的校正值ꎬ不断循环上述2个步骤ꎬ以实现Kalman滤波跟踪ꎮ2.3.2㊀光斑多目标跟踪算法流程夜间船舶多光斑跟踪需解决的主要问题包括:由于光斑数量较多ꎬ需对每一帧图像检测到的光斑进行匹配ꎻ由于灯光闪烁的问题ꎬ导致光斑检测不稳定ꎬ例如同一个光斑相邻帧图像未能均检测到该光斑ꎮ同时ꎬ船舶驶离视频监控区域范围时ꎬ需将对应光斑的观测结果删除ꎮ针对第一个问题ꎬ采用匈牙利算法[25]进行光斑匹配ꎻ针对第二个问题ꎬ首先对上一帧跟踪光斑进行55㊀㊀王群朋ꎬ等:基于光斑跟踪的夜间航行船舶跟踪方法Kalman滤波ꎬ再对观测结果与测量结果进行匈牙利匹配ꎬ根据匹配的结果和设定的距离阈值判断光斑是否保留ꎮ将未匹配上的新检测到的光斑作为新的光斑ꎬ同时将原有而之后未匹配次数达到阈值的光斑设为已离开视频监控区域的光斑ꎬ进行删除ꎮ跟踪流程见图4ꎮ图4㊀光斑跟踪算法流程㊀㊀(1)Kalman滤波预测ꎮ根据2.3.1节所述Kalman滤波各参数依次对前一帧图像中检测到的光斑进行预测ꎬ并计算协方差矩阵和Kalman系数ꎮ(2)数据匹配ꎮ计算各测量点与观测点之间的欧氏距离ꎬ根据距离矩阵ꎬ采用匈牙利算法对点集进行匹配ꎮ设定距离阈值ꎬ通过匹配点之间的距离与阈值进行比较ꎬ确定是否为有效的匹配ꎬ若测量点与观测点较远ꎬ则认为配对无效ꎮ(3)Kalman滤波更新ꎮ对基于测量值的有效匹配点观测值进行更新ꎬ并更新协方差矩阵ꎮ(4)光斑新增与删除ꎮ考虑新的船舶进入视频监控区域ꎬ需对新的光斑进行跟踪ꎮ在数据匹配过程中ꎬ除了无效匹配以外ꎬ还包含未进行匹配的测量点ꎬ被认为是新增的光斑ꎬ添加到当前光斑跟踪数据中ꎮ同时ꎬ对观测点中未匹配上的点进行标记ꎬ若标记次数达到阈值ꎬ则光斑可能已超出视频监控区域范围ꎬ需删除该观测点ꎮ循环上述步骤ꎬ以实现光斑的跟踪ꎮ3㊀试验分析利用opencv和vs2013编程环境实现夜间船舶监控视频光斑检测和跟踪ꎬ以实际夜间船舶航行监控视频作为案例进行验证ꎬ沿海水域夜间船舶航行视频图像见图5ꎬ经裁剪后的图像分辨率为550ˑ420ꎬ圆圈所示物标即为航行船舶船灯ꎮ由图5可知:除了船灯ꎬ船舶的其他区域与图像背景均为黑色ꎬ难以从图像背景中区分船舶ꎬ从而检测到其他船舶特征ꎮ3.1㊀光斑检测试验3.1.1㊀灰度值阈值试验船舶在夜间航行时ꎬ因受沿岸灯光㊁海面反射灯光和船灯闪烁等影响ꎬ导致船舶光斑检测难度增加ꎮ为将其他光斑过滤ꎬ经LOG运算之后ꎬ采用灰度值阈值对光斑进行过滤ꎮ将灰度阈值分别取60㊁65㊁70㊁75和80时ꎬ视频每隔20帧进行光斑检测并过滤ꎬ光斑个数变化情况见图6ꎮ图5㊀沿海水域夜间船舶航行视频图像图6㊀光斑检测个数随灰度阈值变化情况㊀㊀由图6可知:当灰度阈值分别取60㊁65㊁70㊁75和80时ꎬ光斑检测个数在1~6范围内变化ꎻ随着灰度阈值增大ꎬ光斑检测个数减少ꎻ对于同一灰度阈值而言ꎬ检测到的光斑个数动态变化ꎮ为保证通过光斑检测船舶跟踪的有效性ꎬ需保证既能检测到船舶灯光ꎬ又能使船舶灯光检测个数稳定ꎮ当前航行船舶主要有2个光斑ꎬ同时有一个弱光斑在闪烁ꎬ部分帧中可能被当作重叠光斑ꎬ因此取光斑检测个数为2~3的灰度阈值ꎬ即取灰度值阈值为70ꎮ3.1.2㊀光斑检测结果根据光斑检测流程和灰度值阈值试验结果对船舶光斑进行检测ꎮ同样ꎬ为使船舶跟踪效果明显ꎬ在视频中间每隔20帧取一帧图像进行光斑检测和跟踪ꎬ实现算法验证ꎮ视频中图像检测到的光斑结果见图7ꎮ由图7可知:光斑检测个数相对稳定ꎬ检测到的船舶光斑个数为2个ꎮ由此可确定光斑检测方法的稳定性较好ꎮ3.2㊀光斑跟踪试验在光斑跟踪过程中ꎬ需对新出现的光斑保持记忆功能ꎬ即对检测到的新光斑进行标记ꎮ当后续图像中光斑未检测到标记达到指定次数时ꎬ可认为已退出监控区域或视为无效光斑ꎮ3.2.1㊀距离阈值试验采用匈牙利算法对观测数据与跟踪数据进行匹65㊀中㊀国㊀航㊀海2020年第4期a)第1帧b)第121帧c)第241帧d)第361帧e)第481帧f)第601帧g)第721帧h)第841帧图7㊀光斑检测试验结果配之后ꎬ需对匹配上的点进行判断ꎬ若匹配点之间的距离大于设定的阈值ꎬ则可认为是无效匹配ꎮ距离阈值设置依据:前后帧图像中同一光斑能有效匹配ꎬ不同帧不同光斑不能匹配ꎮ若阈值设置过小ꎬ易导致不同帧同一光斑的实际距离大于阈值ꎬ则无法匹配ꎬ可认为是无效匹配ꎻ若阈值设置过大ꎬ可能出现不同帧不同光斑被匹配到一起的现象ꎬ影响光斑跟踪效果ꎮ本文采用试验的方法对距离阈值进行取值ꎬ设置初始化阈值为6ꎬ阈值增长步长为2ꎬ观察阈值取值为6㊁8和10时的光斑跟踪效果ꎬ从而确定距离阈值ꎮ当距离阈值为6㊁8和10时ꎬ对应第441帧㊁481帧㊁501帧㊁541帧和第641帧跟踪结果见图8ꎬ将光斑分别标记为a㊁b和cꎬ将跟踪轨迹标记为1㊁2㊁3和4ꎮ在第441帧出现第3个光斑cꎬ对光斑c进行标记ꎮ在第481帧:当距离为6时ꎬ光斑b与第441帧中的光斑c和跟踪轨迹2均无法完成匹配ꎻ当距离为8和10时ꎬ光斑b与第441帧中的光斑c距离较近ꎬ完成匹配ꎬ连接成跟踪轨迹4ꎬ此时跟踪轨迹2虽未匹配上ꎬ但暂被保留ꎮ在第501帧:当距离为6时ꎬ光斑b无法完成匹配ꎻ当距离为8和10时ꎬ光斑b与跟踪轨迹2完成匹配ꎮ在第541帧出现第3个光斑c:当距离为6时ꎬ跟踪轨迹3与光斑b完成匹配ꎬ跟踪轨迹2与光斑c匹配ꎬ原始跟踪轨迹2变形ꎻ当距离为8时ꎬ跟踪轨迹4未与光斑c未匹配上ꎻ当距离为10时ꎬ二者则完成匹配ꎬ跟踪轨迹4出现变形ꎮ在第641帧:当距离为6时ꎬ跟踪轨迹2消失ꎬ出现新的跟踪轨迹3ꎻ当距离为8和10时ꎬ轨迹4消失ꎬ仍保留最原始的跟踪轨迹2ꎮ光斑跟踪试验结果如图8所示ꎮ由图8可知:当距离阈值取6时ꎬ阈值过小ꎬ导致同一光斑未被有效跟踪ꎬ影响跟踪效果ꎻ当距离为10时ꎬ出现不同光斑被匹配到一起的情形ꎮ因此ꎬ确定距离阈值可取8ꎮ3.2.2㊀光斑跟踪结果根据Kalman滤波多目标跟踪算法流程ꎬ对光斑第441帧第481帧第501帧第541帧第641帧a)距离阀值:6第441帧第481帧第501帧第541帧第641帧b)距离阀值:8第441帧第481帧第501帧第541帧第641帧c)距离阀值:10图8㊀距离阈值取值试验结果进行跟踪ꎬ图8对应帧图像跟踪结果见图9(其中距离阈值为8)ꎬ图片分辨率仍为550ˑ420ꎬ采用有色折线对前后帧图像中的同一光斑进行连接ꎮa)第1帧㊀b)第121帧㊀c)第241帧㊀d)第361帧e)第481帧㊀f)第601帧㊀g)第721帧㊀h)第841帧图9㊀光斑跟踪试验结果㊀㊀由图9可知:采用基于光斑检测和Kalman滤波的多目标跟踪方法能实现夜间船舶的检测跟踪ꎮ经光斑检测ꎬ得到2个主要光斑ꎬ通过2条光斑跟踪连线ꎬ能准确判断出光斑的运行状态ꎬ从而判断出当前视频监控区域内的船舶及其运行状态ꎮ但是ꎬ由于船灯闪烁的原因ꎬ图像跟踪视觉效果受到一定程度的影响ꎬ如图9中第481帧和第601帧中由于光斑闪烁出现无效跟踪轨迹ꎬ直至后续图像中未检测到该光斑ꎬ无效跟踪轨迹消失ꎮ4㊀结束语本文对光斑检测和跟踪方法进行研究ꎬ并基于对实际夜间船舶航行监控视频的试验分析验证该方法的有效性ꎮ采用LOG算子和光斑阈值过滤方法实现对夜间航行船舶船灯的检测ꎬ保证在检测到船灯的同时过滤掉其他噪声ꎻ同时ꎬ基于Kalman滤波构建船灯跟踪模型ꎬ对光斑进行跟踪ꎬ实现对夜间船舶的跟踪ꎮ通过试验发现ꎬ采用光斑跟踪实现船舶跟踪存在以下2个问题:75㊀㊀王群朋ꎬ等:基于光斑跟踪的夜间航行船舶跟踪方法1)由于灯光闪烁ꎬ导致灯光检测数目不稳定ꎬ可能出现无效跟踪轨迹ꎮ2)由于同一艘船舶存在多个光斑ꎬ因此对同一艘船舶出现多条跟踪轨迹ꎬ影响跟踪视觉效果ꎮ当前采用摄像头实现对夜间航行船舶检测的研究较少ꎬ基于该研究可实现普通摄像头对夜间航行船舶的检测和跟踪ꎬ从而提高夜间航行船舶检测的精度ꎮ今后研究可考虑如何过滤无效光斑和如何将同一艘船舶的多光斑跟踪转化为单目标的跟踪ꎮ同时ꎬ本文以船舶内河夜间航行视频为对象进行研究ꎬ场景较为简单ꎬ有关夜间船舶航行更复杂场景中光斑检测效果的有效性需要进一步研究ꎬ从而进一步提高夜间航行船舶跟踪效果ꎮ参考文献[1]㊀刘铿ꎬ张兢.内河船舶远距离识别和跟踪系统探讨[J].船海工程ꎬ2010ꎬ39(5):134 ̄135. [2]㊀FEFILATYEVSꎬGOLDGOFD.DetectionandTrackingofMarineVehiclesinVideo[C]ʊInternationalConferenceonPatternRecognition.IEEEꎬ2012:1 ̄4. [3]㊀LIULꎬLIUXꎬCHUXꎬetal.CoverageEffectivenessAnalysisofAISBaseStation:ACaseStudyinYangtzeRiver[C]ʊInternationalConferenceonTransportationInformationandSafety.IEEEꎬ2017:178 ̄183. [4]㊀LIUJꎬWEIHꎬHUANGXYꎬetal.ABridge ̄ShipCollisionAvoidanceSystemBasedonFLIRImageSequences[M].Netherlands:Springerꎬ2009:123 ̄133.[5]㊀LIULꎬZHANGYJꎬLIUJꎬetal.ApplicationofInfraredBinocularVisionforMonitoringMovingTargetinPort[J].AppliedMechanics&Materialsꎬ2014ꎬ678:155 ̄161.[6]㊀TELLOMꎬLOPEZ ̄MARTINEZCꎬMALLORQUIJJ.ANovelAlgorithmforShipDetectioninSARImageryBasedontheWaveletTransform[J].IEEEGeoscienceandRemoteSensingLettersꎬ2005.2(2):201 ̄205. [7]㊀MARINOA.ANotchFilterforShipDetectionWithPolarimetricSARData[J].IEEEJournalofSelectedTopicsinAppliedEarthObservationsandRemoteSensingꎬ2013.6(3):1219 ̄1232.[8]㊀ELVIDGECꎬZHIZHINMꎬBAUGHKꎬetal.AutomaticBoatIdentificationSystemforVIIRSLowLightImagingData[J].RemoteSensingꎬ2015ꎬ7(3):㊀㊀㊀㊀㊀㊀3020 ̄3036.[9]㊀YAMAGUCHIT.Temporalmonitoringofvesselsactivityusingday/nightbandinSuomiNPPonSouthChinaSea.2017ꎬSPIE.101860K ̄101860K ̄8.[10]㊀王培玉ꎬ李峰ꎬ周书仁ꎬ等.复杂码头环境下的船舶检测与跟踪算法[J].计算机工程与科学ꎬ2017ꎬ39(5):992 ̄998.[11]㊀汪永军ꎬ莫红飞ꎬ闫冯军ꎬ等.一种基于岸基多雷达的船舶监视管理系统[J].舰船电子对抗ꎬ2018ꎬ41(3):36 ̄41.[12]㊀毕方全.控制河段船舶违规航行检测方法[J].水运工程ꎬ2017(6):168 ̄173.[13]㊀穆孟超ꎬ胡钊政ꎬ李祎承.基于虚拟线圈的内河船舶流量检测方法[J].交通信息与安全ꎬ2017ꎬ35(4):44 ̄51.[14]㊀沈洋.无人机航拍视频的船舶检测算法[J].现代计算机(专业版)ꎬ2018(25):52 ̄55[15]㊀杨名ꎬ阮雅端ꎬ陈林凯ꎬ等.甚高速区域卷积神经网络的船舶视频检测方法[J].北京邮电大学学报ꎬ2017ꎬ40(S1):130 ̄134.[16]㊀黄于欣.基于openCV的视频路径船舶检测与跟踪[J].舰船科学技术ꎬ2017ꎬ39(16):28 ̄30. [17]㊀陆煊ꎬ谢承利ꎬ张成.DirectShow在船舶视频监视系统中的应用[J].船海工程ꎬ2013ꎬ42(4):120 ̄122. [18]㊀CHARETTERDꎬNASHASHIBIF.RealTimeVisualTrafficLightsRecognitionBasedonSpotLightDetectionandAdaptiveTrafficLightsTemplates[C]//IntelligentVehiclesSymposium.IEEEꎬ2009:358 ̄363. [19]㊀陈娟ꎬ陈乾辉ꎬ师路欢ꎬ等.图像跟踪中的边缘检测技术[J].中国光学与应用光学ꎬ2009ꎬ2(1):46 ̄53. [20]㊀张英明ꎬ李永亮ꎬ张翼鹏ꎬ等.激光光斑边缘检测算子的研究进展[J].量子光学学报ꎬ2019ꎬ25(1):109 ̄116.[21]㊀蔡丹ꎬ段先华ꎬ高海壮.水上运动船舶的检测与跟踪[J].计算机与数字工程ꎬ2017ꎬ45(7):1313 ̄1317. [22]㊀杨宇君.卡尔曼滤波在船舶跟踪预测中的研究应用[J].舰船科学技术ꎬ2016ꎬ38(22):67 ̄69.[23]㊀贺强ꎬ晏立ꎬ基于LOG和Canny算子的边缘检测算法[J].计算机工程ꎬ2011ꎬ37(3):210 ̄212. [24]㊀赵广辉ꎬ卓松ꎬ徐晓龙.基于卡尔曼滤波的多目标跟踪方法[J].计算机科学ꎬ2018ꎬ45(8):253 ̄257. [25]㊀朱明ꎬ梁栋ꎬ范益政ꎬ等.基于谱特征的图像匹配算法[J].华南理工大学学报(自然科学版)ꎬ2015(9):60 ̄66.85㊀中㊀国㊀航㊀海2020年第4期。
船用光电取证系统连接图 - zhjtgovcn

珠海市交通运输局综合行政执法局新建执法船增配夜视仪配套设备参数及要求1 范围本技术规格书适用于执法船DN20S光电取证系统,是该设备设计、制造、试验、验收和交付的技术依据,并作为订货合同的附件。
2 引用文件(规范标准)2.1船级社及产品证书船级社:按渔业船舶法定检验规则和中国船级社(CCS)《钢质海船入级规范(2012)》及其修改通报来设计、制造。
产品证书:工厂合格证书2.2规范及标准1、《电气电子产品型式认可试验指南》2、国际海事组织(IMO)《国际海上人命安全公约》(SOLAS) 2004年综合文本及至合同生效前所有颁布的修正案(包括关于GMDSS系统的要求)3、国际海事组织(IMO)《MARPOL 73/78》及所有颁布的修正案,包括附则Ⅰ(含13F,25A)、Ⅳ、Ⅴ和Ⅵ;4、《船舶与海上设施法定检验规则—国内航行海船法定检验技术规则(2011);《渔业船舶检验规则》(2000)及修改通报(2008)5、《海洋渔业船舶法定检验规程》(2003)3 要求3.1概述系统包括一个带陀螺稳定的指向器,以及驾驶室内的显控、录像设备。
指向器安装在船上视野开阔的位置,在白天通过高性能彩色电视摄像系统,在夜间通过红外热像仪,对水面的目标进行观察、监视,达到安全出航、发现目标、现场执法、及时取证的目的。
船只晃动时,带陀螺稳定的指向器能有效隔离船舶的摇摆,使得安装在其中的摄像机镜头始终对准目标,从而使后端得到画面稳定的图像。
舱内有控制器,用户可控制指向器的方向,对准目标,拍摄取证画面。
系统还包括本船监控系统,与光电取证系统共用显控设备。
3.1.1组成系统主要由安装在船上视野开阔位置的光电指向器、安装于船内的显控设备组成。
舱外指向器由电视摄像系统、红外热像仪、两轴转台、陀螺伺服稳定系统等部分组成。
电视摄像系统:由镜头和高性能彩色CCD摄像机组成。
红外热像仪:由定焦红外镜头和非制冷红外热像仪组成。
转台:由方位座、俯仰包及支撑结构组成。
“夜通航”船用光电取证跟踪系统解决方案2020.9.28

“夜通航”船用光电取证跟踪系统解决方案我国的海域辽阔,海上执法部门有海监、海事、渔政、海关、公安边防海警部队等执法力量,呈现出多头管理、职能交叉的特点。
其中,海监部门的主要职能是对国家管辖海域(包括海岸带)实施巡航监视,查处侵犯海洋权益、违法使用海域、损害海洋环境与资源、破坏海上设施、扰乱海上秩序等违法违规行为,并依照有关法律和规定,根据委托或授权进行其他海上执法工作;海事部门主要负责国家水上安全监督和防止船舶污染、船舶及海上设施检验、海上安全救生等工作;渔政部门的任务是渔业保护和渔业执法;海关部门的职责以缉私;公安边防海警部队的主要任务是维护中国管辖海域的治安秩序。
然而海上执法是—项复杂的工作,夜晚、雾霾天气执法时能见度不良,不仅给船舶航行安全带来很大影响,调查、取证难度大且十分费时。
雷达画面显示不够直观,不能直接对周边环境进行判断,或寒潮天气,受风浪影响,船只摇晃,普通监控设备难以在恶劣环境中对重点目标进行跟踪和抓拍取证。
因为画面抖动,拉近后目标可能会丢失;夜间使用普通摄像机无法远距离监控,海上执法对产品要求很是严格,需要做到不管白天,晚上,雾天,都要能及时发现目标, 看清对方船名船号以及对方情况。
系统要求简单、易于操作。
广州恒威电子科技有限公司成立于2005年,是国家级高新技术企业,专业研发、生产、销售“夜通航”船用光电跟踪取证系统、船用夜视仪、船用微光摄像机、船用雾航仪、船用视频监控系统、船舶防碰撞系统、水上水下搜救系统、海水养殖、海域远程监控系统、智慧边海防监控系统、红外热成像等特种安防产品。
积累了陀螺稳定、自动跟踪、AI算法等技术开发,以及船舶、岸基、海基光电系统集成经验,在全国海洋执法船用光电跟踪取证系统领域有一定的影响力。
“夜通航”船用光电跟踪取证系统包括一个带陀螺稳定功能的指向器,以及驾驶室内的显控、录像设备。
指向器安装在船上视野开阔的位置。
指向器集红外热像仪、激光红外照明器、AI算法、跟踪模块、超低照度摄像机及高性能转台于一体,内置的非制冷氧化钒焦平面红外热像仪,即使在黑夜或雾天航行也能提供清晰的红外热图像。
基于光电探测技术的智能船舶监控系统

基于光电探测技术的智能船舶监控系统随着科技的不断进步和发展,智能化技术在各个领域得到了广泛应用,其中智能船舶监控系统是一个备受关注的领域。
基于光电探测技术的智能船舶监控系统是一种利用光电传感器来实时监测船舶状态和环境的系统。
本文将从光电探测技术的原理、智能船舶监控系统的应用以及未来发展方向等方面进行论述。
光电探测技术是一种通过光电传感器来接收和处理光信号的技术。
光电传感器是一种能够将光信号转化为电信号的器件,它可以感知光的强度、波长和方向等参数。
在智能船舶监控系统中,光电探测技术可以被应用于多个方面。
首先,光电传感器可以用于监测船舶周围的环境。
通过安装在船舶上的光电传感器,系统可以实时感知船舶周围的光照强度、天气情况以及水下障碍物等信息,从而提供给船舶驾驶员更准确的导航和操作指导。
其次,光电传感器还可以用于监测船舶内部的状态。
例如,通过安装在船舱内的光电传感器,系统可以实时监测船舶内的温度、湿度和气体浓度等参数,以确保船舶内部的安全和舒适。
智能船舶监控系统的应用范围非常广泛。
首先,它可以被应用于商业船舶。
商业船舶通常需要长时间的航行和运输,因此对船舶的状态和环境要求非常高。
通过安装基于光电探测技术的智能船舶监控系统,船舶管理人员可以实时监测船舶的状态,及时发现并解决潜在的问题,提高船舶的安全性和运输效率。
其次,智能船舶监控系统还可以被应用于军事船舶。
军事船舶通常需要在复杂的海上环境中执行任务,因此对船舶的监控和控制要求非常高。
基于光电探测技术的智能船舶监控系统可以实时监测和分析船舶周围的环境,提供给军事人员更准确的情报和决策支持。
此外,智能船舶监控系统还可以被应用于渔船、游艇等各种类型的船舶,以提供更好的船舶管理和航行安全保障。
未来,基于光电探测技术的智能船舶监控系统还有很大的发展空间。
首先,随着光电传感器技术的不断进步,传感器的灵敏度和分辨率将会得到提高,从而使得系统可以更准确地感知船舶周围的环境和船舶内部的状态。
“夜通航”船用光电取证系统为某市渔政执法部门助力

“夜通航”船用光电取证系统为某市渔政执法部门助力近日,某市渔政执法单位从我司购进了一批“夜通航”舰用光电取证系统。
船用光电取证系统集非制冷氧化钒焦平面红外热像仪、40mm红外镜头、 200万高清摄像机、30倍高清变焦镜头及高性能双轴陀螺转台于一体。
采用国际先进的图像数字处理技术、目标自动锁定跟踪技术、图像稳定技术,该系统能够在黑夜、雾霾、雨雪天等恶劣环境,完整输出清晰的监控图像。
白天使用高清摄像机对船舶周围水面作全方位搜索与监视,黑夜或雾霾情况下使用红外热像仪可快速寻找到目标。
适用于海监船、海事船、渔政船、缉私艇、水警船、救捞船、科考船、游轮、游艇、邮轮、客滚船、滚装船、高速客轮。
我司领导也非常重视此次项目的安装调试,船用光电取证系统安装前,委派我司几名骨干技术人员前往某市渔政执法单位协同对舰船执法光电取证系统的安装与调试。
在某市渔政执法单位人员和我司技术人员的共同努力,安装过程非常顺利。
安装完毕后,我司技术人员对船用光电取证系统进行了现场调试,完全符合某市渔政执法单位的使用要求。
某市渔政执法单位人员对我司的技术人员非常满意,无论从技术能力方面,还是服务态。
对我司“夜通航”船用光电取证系统的质量及功能也大为赞许,并表示会持续关注我司其他船用监控设备,以期再次合作。
客户的赞许就是恒威的动力,我们将不负众望,继续研发、生产更多高科技产品,追求创新、高效;秉承着“一流的技术、一流的产品、一流的服务”的经营理念,为中国的海事执法事业提供更高端的产品和更好的服务。
渔政执法利器——“夜通航”渔政执法监控系统
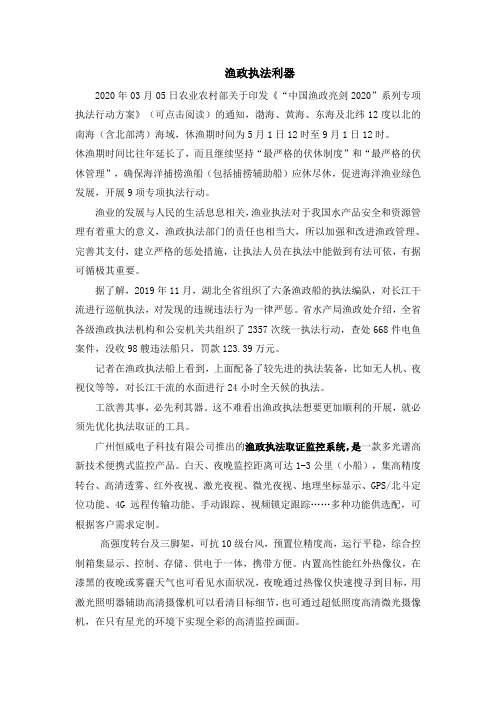
渔政执法利器2020年03月05日农业农村部关于印发《“中国渔政亮剑2020”系列专项执法行动方案》(可点击阅读)的通知,渤海、黄海、东海及北纬12度以北的南海(含北部湾)海域,休渔期时间为5月1日12时至9月1日12时。
休渔期时间比往年延长了,而且继续坚持“最严格的伏休制度”和“最严格的伏休管理”,确保海洋捕捞渔船(包括捕捞辅助船)应休尽休,促进海洋渔业绿色发展,开展9项专项执法行动。
渔业的发展与人民的生活息息相关,渔业执法对于我国水产品安全和资源管理有着重大的意义,渔政执法部门的责任也相当大,所以加强和改进渔政管理、完善其支付,建立严格的惩处措施,让执法人员在执法中能做到有法可依,有据可循极其重要。
据了解,2019年11月,湖北全省组织了六条渔政船的执法编队,对长江干流进行巡航执法,对发现的违规违法行为一律严惩。
省水产局渔政处介绍,全省各级渔政执法机构和公安机关共组织了2357次统一执法行动,查处668件电鱼案件,没收98艘违法船只,罚款123.39万元。
记者在渔政执法船上看到,上面配备了较先进的执法装备,比如无人机、夜视仪等等,对长江干流的水面进行24小时全天候的执法。
工欲善其事,必先利其器。
这不难看出渔政执法想要更加顺利的开展,就必须先优化执法取证的工具。
广州恒威电子科技有限公司推出的渔政执法取证监控系统,是一款多光谱高新技术便携式监控产品。
白天、夜晚监控距离可达1-3公里(小船),集高精度转台、高清透雾、红外夜视、激光夜视、微光夜视、地理坐标显示、GPS/北斗定位功能、4G远程传输功能、手动跟踪、视频锁定跟踪……多种功能供选配,可根据客户需求定制。
高强度转台及三脚架,可抗10级台风,预置位精度高,运行平稳,综合控制箱集显示、控制、存储、供电于一体,携带方便。
内置高性能红外热像仪,在漆黑的夜晚或雾霾天气也可看见水面状况,夜晚通过热像仪快速搜寻到目标,用激光照明器辅助高清摄像机可以看清目标细节,也可通过超低照度高清微光摄像机,在只有星光的环境下实现全彩的高清监控画面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“夜通航”船用光电取证跟踪系统解决方案
我国的海域辽阔,海上执法部门有海监、海事、渔政、海关、公安边防海警部队等执法力量,呈现出多头管理、职能交叉的特点。
其中,海监部门的主要职能是对国家管辖海域(包括海岸带)实施巡航监视,查处侵犯海洋权益、违法使用海域、损害海洋环境与资源、破坏海上设施、扰乱海上秩序等违法违规行为,并依照有关法律和规定,根据委托或授权进行其他海上执法工作;海事部门主要负责国家水上安全监督和防止船舶污染、船舶及海上设施检验、海上安全救生等工作;渔政部门的任务是渔业保护和渔业执法;海关部门的职责以缉私;公安边防海警部队的主要任务是维护中国管辖海域的治安秩序。
然而海上执法是—项复杂的工作,夜晚、雾霾天气执法时能见度不良,不仅给船舶航行安全带来很大影响,调查、取证难度大且十分费时。
雷达画面显示不够直观,不能直接对周边环境进行判断,或寒潮天气,受风浪影响,船只摇晃,普通监控设备难以在恶劣环境中对重点目标进行跟踪和抓拍取证。
因为画面抖动,拉近后目标可能会丢失;夜间使用普通摄像机无法远距离监控,海上执法对产品要求很是严格,需要做到不管白天,晚上,雾天,都要能及时发现目标, 看清对方船名船号以及对方情况。
系统要求简单、易于操作。
广州恒威电子科技有限公司成立于2005年,是国家级高新技术企业,专业研发、生产、销售“夜通航”船用光电跟踪取证系统、船用夜视仪、船用微光摄像机、船用雾航仪、船用视频监控系统、船舶防碰撞系统、水上水下搜救系统、海水养殖、海域远程监控系统、智慧边海防监控系统、红外热成像等特种安防产品。
积累了陀螺稳定、自动跟踪、AI算法等技术开发,以及船舶、岸基、海基光电系统集成经验,在全国海洋执法船用光电跟踪取证系统领域有一定的影响力。
“夜通航”船用光电跟踪取证系统包括一个带陀螺稳定功能的指向器,以及驾驶室内的显控、录像设备。
指向器安装在船上视野开阔的位置。
指向器集红外热像仪、激光红外照明器、AI算法、跟踪模块、超低照度摄像机及高性能转台于一体,内置的非制冷氧化钒焦平面红外热像仪,即使在黑夜或雾天航行也能提供清晰的红外热图像。
并且内置低照度摄像机,在光线较暗时也能提供高清晰的彩色图像,光线不足时可通过激光红外照明器以及红外热像仪对水面的目标进行搜索、监控。
红外热成像是根据物体的温差来成像,不同物体之间有温差,物体的不同表面对于热辐射有不同的反射作用,所以热像仪是较为理想的夜视设备,能够在漆黑环境中看清行驶的船只,使船只在无照明条件下行进,同时具有透雾功能,在恶劣的航行条件下,可看到周围水面的情况,增强安全性,确保在夜间及雾天能迅速发现目标。
船舶晃动时,带双轴陀螺稳定的指向器能有效隔离船舶的摇摆,使得安装在其中的摄像机镜头始终对准目标,从而使后端得到画面稳定的图像。
舱内有控制键盘,用户可控制高速转台搭载的指向器方向,通过热像仪快速搜寻到目标,用激光照明器辅助高清摄像机可以看清目标细节,拍摄取证画面。
执法人员不再为看不清,无法拍摄取证图片的问题犯难,现场监控更加清晰,为执法取证、各种纠纷、突发性事件等提供了详实的证据,确保无论在白天还是夜间航行,执法人员可以快速避开障碍,找到目标、看清目标。
视频信号输入录像机后,输出的彩色画面或者红外成像画面上,实时叠加了日期(年月日)、时间(时分秒)、GPS(经纬度)、平台转动角度、以真北为参考的航向等信息,使用者在记录图像的同时,也记录下当时的时间(该时间为GPS接收的卫星时间,无须设置)、地点、方向,从而达到取证的目的;
多年来,广州恒威科技自主研发、生产的“夜通航”船用光电取证跟踪系统荣获了《广东省高新技术产品证书》、多项《计算机软件著作权登记证书》及《实用新型专利证书》。
恒威科技将持续重点关注公务、工作船市场,深耕船用光电跟踪取证领域,把握社会需求,不断提升产品技术、完善产品解决方案,为建设制造强国、海洋强国、交通强国的战略部署,提升船舶工业核心竞争力,实现我国船舶工业高质量发展做出应有的贡献!。