AutoMod系统建模与仿真实验指导书
AutoMod系统建模与仿真实验指导书
系统建模与仿真
实验指导书
北京邮电大学 自动化学院 北京亿特克科技有限公司 答案整理
目录
概述 AutoMod 软件简介和仿真试验综述 .............................................................................. 1 实验一 简单流水作业线仿真 ............................................................................................... 8 实验一 简单流水作业线仿真详细解析 ........................................................................... 11 1 新建一个模型 ............................................................................................................. 12 2 定义各种实体单元 ..................................................................................................... 13 3 绘制模型平面布置图 ................................................................................................. 20 4 定义 Source File .......................................................................................................... 21 5 设定 Run Control ......................................................................................................... 22 6 模型运行 ..................................................................................................................... 22 7 查看运行结果 ............................................................................................................. 25 8 模型优化 ..................................................................................................................... 26 附录 Source File 的内容 ................................................................................................ 27 实验二 传送带系统仿真 ..................................................................................................... 30 实验二 传送带系统仿真详细解析 ................................................................................. 33 1 创建一个新的模型 ...................................................................................................... 33 2 定义各种实体单元 ...................................................................................................... 38 3 绘制模型平面布置图 ................................................................................................. 41 4 定义 Source File .......................................................................................................... 41 5 设定 Run Control ......................................................................................................... 42 6 定义 Business Graphics ............................................................................................... 42 7 模型运行 ..................................................................................................................... 44 8 查看运行结果 ............................................................................................................. 45 9 模型优化 ..................................................................................................................... 46 附录 Source File 内容 ..................................................................................................... 46 实验三 循经运动系统仿真 ................................................................................................. 49 实验三 循径运动系统仿真详细解析 ............................................................................. 53 1 创建一个新的模型 ..................................................................................................... 53 2 定义 Path Mover 子系统 pm ...................................................................................... 55
系统建模与仿真实验指导书(2)
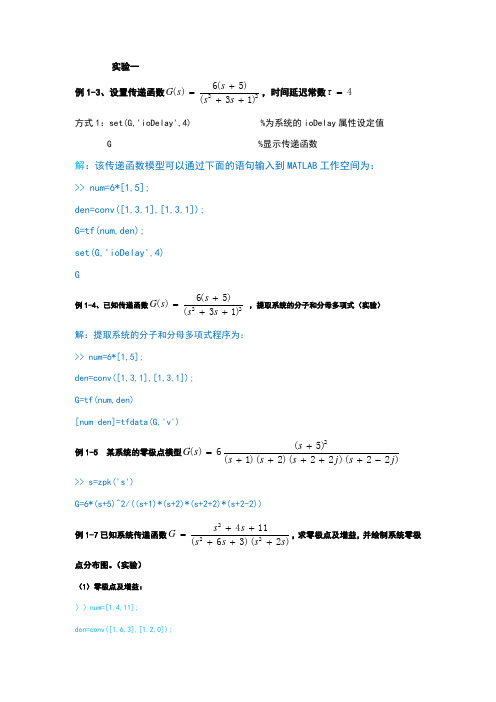
实验一例1-3、设置传递函数22)13()5(6)(+++=s s s s G ,时间延迟常数4=τ 方式1:set(G,'ioDelay',4) %为系统的ioDelay 属性设定值G %显示传递函数解:该传递函数模型可以通过下面的语句输入到MATLAB 工作空间为: >> num=6*[1,5];den=conv([1,3,1],[1,3,1]); G=tf(num,den); set(G,'ioDelay',4) G例1-4、已知传递函数22)13()5(6)(+++=s s s s G,提取系统的分子和分母多项式(实验) 解:提取系统的分子和分母多项式程序为: >> num=6*[1,5];den=conv([1,3,1],[1,3,1]); G=tf(num,den)[num den]=tfdata(G,'v')例1-5 某系统的零极点模型)22)(22)(2)(1()5(6)(2j s j s s s s s G -++++++= >> s=zpk('s')G=6*(s+5)^2/((s+1)*(s+2)*(s+2+2)*(s+2-2))例1-7已知系统传递函数)2)(36(114222s s s s s s G +++++=,求零极点及增益,并绘制系统零极点分布图。
(实验)(1)零极点及增益: 〉〉num=[1,4,11]; den=conv([1,6,3],[1,2,0]);G=tf(num,den) [z,p,k]=zpkdata(G,'V')(2)系统零极点分布图:(3)〉〉num=[1,4,11];den=conv([1,6,3],[1,2,0]); G=tf(num,den) pzmap(G)例1-11 给定零极点模型: )5.1)(23())7)(2(8.6)(+±+++=s j s s s s s G用MATLAB 命令得出其等效的零极点传递函数模型。
第一章模拟与Automod模拟软体

AutoMod
Step3 資料收集
(2ห้องสมุดไป่ตู้2)
輸入的資料包含:
歷史資料(historical data)
模擬政策(policies) 隨機程序與資料(random) 常數(constant)
資料的定義更要明確,譬如停機時間是否包括設備修理時
間、而設備修理時間是否也包括等待物料及修理人員的時
使用統計分析去獲得模式正確的結果。
AutoMod
Step10 模式額外的執行
根據模擬完成後的分析,決定是否需要增加額外
的運轉測試,而這些額外的測試可能必須再重新
設計模式的某一部份,並回步驟八的實驗設計階
段,重新定義實驗設計的內容。
AutoMod
Step11 書面報告整理
將結果以書面方式紀錄下來,可在未來參酌或修改模式時,
AutoMod
Step12 模式結果的執行
最後執行階段的成功端賴前述十一項步驟的實施
的程度,若最終使用者在模式建立階段能參與並
了解模式本身的特性與結果,則模式執行階段的
構的模式,是否能真實描繪出實際系統的特性與
彼此之間行為。確認模式的專業人員必須評估模
擬的程序 (procedures) 與語法 (algorithms) ,是否能
適當表達出模式定義範圍內所模擬的系統的行為。
AutoMod
Step8 實驗設計
經過模式驗證與確認的步驟後,我們即可設計適
當的實驗程序以分析系統的行為與結果。其中系
AutoMod
第一節 模擬基本概念
(5/5)
AutoMod 雖然建模的過程是以圖示的方式來建構,
基于AutoMod的自动分拣系统建模与仿真

G ij I u k n, — i HA GZ e gmig AOL-i , UY — u 。 Yu x Z N h n— n  ̄ eL HU n (.c olf uo t nB in nvri P s &T l o 1Sho A tmao , e ig iesy f ot ee mmu i tn, ej g10 7 o i j U to s c nc i sB in 8 6 ao i 0
[ 要】 摘 首先分 析了 自动分拣 系统 的控制信息流 、 真需求 以及仿 真建模功能要求 , 仿 然后 结合 A t o u M d三维仿 真软件 , 出 o 提 了 自动分拣 系统 的三维建模思路 和方法 ,并结 合基于 A t o 仿真软件建立 的交叉带式 和翻盘式 自动分拣 系统 的仿真模型 , u Md o 说 明 了具体的实现方法 , 提高 了物流 自动分拣 系统 三维建模的效率 。 [ 关键  ̄] t d 自动分拣系统 ; Auo ; Mo 仿真建模 ; 精确度 [ 中图分类-12 39  ̄ F 7 . - 【 文献标识码】 A 【 文章编号】0 5 1 2 2 1 )8 0 3 — 3 10 — 5X( 0 0 0 — 13 0
不 同功 能模 块的建模方法 。结 合 A tM d仿 真软件分别建立 uo o
了交叉 带式 翻盘式 自 动分拣 系统的仿真模 型 , 明 了具体_ 说 的
实现方法 。
2 I 自动分拣 系统仿真建模分析
21 自动分 拣 系统 的控 制信 息流 分析 .
常 见 的 物 流 自动 分 拣 系 统 主 要 有 交 叉 带 式 分 拣 系 统 、 滑
Auto Mod仿真报告
物流系统仿真实验报告学号:教学班号: 08物流工程硕研姓名:任课教师:完成日期: 2009年6月17日【实验名称】Auto Mod仿真软件Conveyor和Path mover系统的操作【实验目的】通过采用AutoMod软件进行物流系统的仿真,掌握AutoMod软件的相关操作;同时对物流系统能有更加深入的了解【实验内容】Conveyor和Path mover系统的集成操作。
有三种不同的货物依次为轻、中、重类型,轻型从1口进入,1口出到容器1;中型从2口进入,2口出到容器2;重型从3口进入,3口出到容器3。
由AGV将轻型货物送到检验点检验,检验时货物不离开车,检验过程花时3~7秒(均匀),完成后送到1装配点;由AGV将中型货物送到检验区域,然后进入等待队列等待检验,检验完成后进入队列等待AGV,然后由AGV送到2装配点,每个托盘检验花时40~50秒(均匀);由AGV将中型货物送到准备区域,进入队列,2小时后准备工作完成,进入另一队列等待AGV 将其送到3装配点。
【实验步骤】第一步:创建AutoMod模型文件打开一个Automod软件,新建一个AutoMod模型,点击File,命名为“fanwenjing”,保存至某个盘内。
图1 Auto Mod文件创建第二步:绘制Path mover图1、创建Path mover系统Path mover系统是用来仿真车辆或者操作人员等沿着一定路径运动的系统。
打开system,新建一个Path mover系统,命名为“path1”。
图2 建立Path mover系统图2、绘制引导路径引导路径是机车行走的路径,可以为单向,也可为双向。
(1)进入Pathmover编辑窗口,单击Single line,画出“path1”的所有引导路径。
若要对路径进行编辑,可单击select选中相应的路径后点击Edit对它进行各种参数的设置。
(2)绘制完所有引导路径后,需要对弯道进行连接。
东北林业大学 系统建模与仿真实验指导书

《系统建模与仿真实验设计与指导》机电工程学院电气工程及自动化实验室2013年3月目录基础实验(一)控制系统建模及稳定性分析基础实验(二)控制系统的数字仿真基础实验(三)控制系统的时域分析基础实验(四)控制系统的频域分析综合实验(五)控制系统的设计实验说明:通过本课程的实验教学,学生应熟练掌握MATLAB语言的程序设计与使用。
掌握MATLAB软件实现控制系统数学模型的建立、变换和稳定性分析;控制系统的数字仿真;控制系统的时域、频域分析;控制系统设计。
通过实验对所学的专业理论知识有更深入的理解和认识,从而具备解决自动化及相关专业领域中实际系统分析、设计与综合等问题的能力。
实验报告要求给出具体的MATLAB程序和简要的实验总结。
控制系统建模及稳定性分析一、 实验目的1. 掌握Matlab 中系统模型描述相关命令函数及使用;2. 掌握系统模型变换;3. 掌握Matlab 中不同方法的系统稳定性分析。
二、 实验内容1. 系统数学模型建立与转换2. 控制系统稳定性分析三、 实验步骤1. 系统数学模型建立 P872. 系统数学模型转换 P993. 控制系统稳定性分析 P170给定SISO 系统输入为“flow”,输出为“Temp”,传递函数为使用MATLAB 表示该传递函数()22321.32 2.5e ()0.5 1.21s s s G s s s s -++=+++ 将状态空间模型 转换为传递函数和零 极点增益模型。
[]0100001052011100⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦= x x u y x R ) 已知控制系统结构图如图所示,求取系统的闭环极点,并判别闭环系统的稳定性。
控制系统数字仿真一、实验目的掌握Matlab中典型闭环系统的数字仿真;二、实验内容典型闭环系统的数字仿真MATLAB实现三、实验步骤求如图所示系统的阶跃响应y(t)的数值解。
P135控制系统的时域分析一、 实验目的熟悉MATLAB 环境下求取控制系统时间响应,计算性能指标量,分析系统的动态和稳态性能。
制造系统建模仿真实验指导书
《系统建模与仿真》实验指导书一、实验目的本实验围绕生产物流实验系统展开,进行制造系统的建模、仿真分析与设计优化研究实践。
重点研究运用仿真软件Flexsim,对生产物流实验系统的生产运行过程进行建模、仿真和分析,并进行系统改造的方案论证。
二、实验内容及要求对照实验系统,参考有关系统资料及参考案例,在对系统的基本布局、工作特点、工作流程、及实验生产设备等进行详细研究的基础上,运用Flexsim工具进行建模,并对其生产过程进行仿真。
通过仿真分析了解有关生产实验系统方案是否满足预期运行目标的需要,并且针对仿真生产过程中所表现出来的缺陷与瓶颈问题,提出改进方案。
最终完成对于该生产系统的整体产能及物流运作分析,为系统改造决策提供参考依据。
三、实验类型本实验为设计型实验,可供本科生进行实践性课程学习、课程设计及毕业设计等环节的学习实践之用。
四、实验内容与步骤1.生产制造系统建模与仿真基础知识研究结合有关实验系统的生产运作原型,深入研究制造系统的运作控制,及其系统建模与仿真相关知识;熟悉掌握Flexsim建模仿真工具及其安装运行环境,为具体的实验与分析应用做好前期的理论与技术知识准备。
2.系统总体了解结合所给的实验系统资料及建模仿真设计型实验参考案例,了解本实验系统的物流过程、实验加工与物料处理过程运行控制规则,及具体实验流程等相关方面。
在此基础上拟定自己的不同于所给参考案例的实验方案,为进一步的建模与仿真分析做准备。
3.系统建模及初步的仿真运行调试对系统的各个部分进行Flexsim建模,对各个相应的系统仿真模块进行设计,完成细节上的充分考虑,通过初步调试,验证并确定最终的系统仿真模型。
4.系统仿真与分析针对实验所期望解决的问题,分析仿真数据结果;根据结果对模型进行必要的参数设置与调整;比较不同参数设置下的仿真数据结果,得出分析结论或理想的系统设计方案。
五、实验记录与数据处理要求记录基本操作步骤以及所得仿真分析数据。
AutoMod仿真报告

仿真报告一.仿真题目传送带轨道复合系统设计仿真图一:仿真初步草图(单位英寸,具体各道路尺寸换算结果在尺寸表中)图二:仿真最终效果图表一:各轨道尺寸表错误!未找到引用源。
小车name SLT system Acceleration Deceleration FvelocityCvelocitySvelocityRvelocityCvelocitySvelocityCvelocityRvelocityDistance DefVehicle1default pm132333333320 DefVehicle1default pm132333333320 DefVehicle1Empty pm131111111111 DefVehicle1Empty pm131111111111 DefVehicle2default pm233333222220 DefVehicle2default pm233333222220 DefVehicle2default pm233333222220 DefVehicle2Empty pm243333333331 DefVehicle2Empty pm243333333331 DefVehicle2Empty pm243333333331 DefVehicle3default pm311111111110 DefVehicle3Empty pm311111111110(各子系统小车参数)Segment Type Segment Type Load Pick Up Time Load Set Down Time DefSegment1 1 5sec 5secDefSegment2 1 5sec 5secDefSegment3 1 20sec 20sec(小车装卸货物时间)表二:各设备和货物参数表二.仿真目的1.练习运用学到的仿真知识2.学习练习使用仿真软件AUTOMOD3.练习和熟练学习在软件中建立初步方案下的复合轨道系统,并输入相关的货物、设备参数(如货物到来时间间隔分布参数,叉车加速度、减速度、空车和载货运行速度等)4.进行仿真,得到仿真结果,检查是否合适,进而优化设计最终得到一个可以正常运行合理高效的运输系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统建模与仿真
实验指导书
北京邮电大学 自动化学院 北京亿特克科技有限公司 答案整理
目录
概述 AutoMod 软件简介和仿真试验综述 .............................................................................. 1 实验一 简单流水作业线仿真 ............................................................................................... 8 实验一 简单流水作业线仿真详细解析 ........................................................................... 11 1 新建一个模型 ............................................................................................................. 12 2 定义各种实体单元 ..................................................................................................... 13 3 绘制模型平面布置图 ................................................................................................. 20 4 定义 Source File .......................................................................................................... 21 5 设定 Run Control ......................................................................................................... 22 6 模型运行 ..................................................................................................................... 22 7 查看运行结果 ............................................................................................................. 25 8 模型优化 ..................................................................................................................... 26 附录 Source File 的内容 ................................................................................................ 27 实验二 传送带系统仿真 ..................................................................................................... 30 实验二 传送带系统仿真详细解析 ................................................................................. 33 1 创建一个新的模型 ...................................................................................................... 33 2 定义各种实体单元 ...................................................................................................... 38 3 绘制模型平面布置图 ................................................................................................. 41 4 定义 Source File .......................................................................................................... 41 5 设定 Run Control ......................................................................................................... 42 6 定义 Business Graphics ............................................................................................... 42 7 模型运行 ..................................................................................................................... 44 8 查看运行结果 ............................................................................................................. 45 9 模型优化 ..................................................................................................................... 46 附录 Source File 内容 ..................................................................................................... 46 实验三 循经运动系统仿真 ................................................................................................. 49 实验三 循径运动系统仿真详细解析 ............................................................................. 53 1 创建一个新的模型 ..................................................................................................... 53 2 定义 Path Mover 子系统 pm ...................................................................................... 55
2 定义各种实体单元 ...................................................................................................... 61 3 绘制模型平面布置图 ................................................................................................. 64 4 定义 Source File .......................................................................................................... 64 5 设定 Run Control ......................................................................................................... 65 6 模型运行 ..................................................................................................................... 65 7 实验方案设计 ............................................................................................................. 66 8 仿真结果输出 ............................................................................................................. 67 附录 Source File 内容 ..................................................................................................... 69 实验四 简单生产-库存系统建模与仿真 ............................................................................ 72 实验四 简单生产-库存系统建模与仿真解析 .................................................................. 76 1 创建一个新的模型 ...................................................................................................... 76 2 定义各种实体单元 ...................................................................................................... 80 3 绘制模型平面布置图 ................................................................................................. 82 4 定义 Source File ............................................................................... 82 5 设定 Run Control ......................................................................................................... 82 6 定义 Business Graphics ............................................................................................... 83 7 模型运行 ..................................................................................................................... 84 8 查看运行结果 ............................................................................................................. 85 9 系统优化 ..................................................................................................................... 87 附录 Source File 内容 ..................................................................................................... 88