脑控智能轮椅控制系统
动力轮椅车的智能化控制系统开发与应用

动力轮椅车的智能化控制系统开发与应用随着科技的不断进步,智能化控制系统的应用越来越广泛,包括了很多领域,其中之一就是动力轮椅车。
动力轮椅车的智能化控制系统的开发与应用,旨在为残疾人提供更加便捷、舒适和安全的交通工具。
本文将介绍该系统的开发原理、主要功能以及应用场景。
智能化控制系统的开发是一个复杂而严谨的过程,需要结合机器人技术、传感器技术和嵌入式系统等多个领域的知识。
首先,开发团队需要设计一个可靠的控制算法,以确保动力轮椅车的运动稳定性和安全性。
这需要对车辆动力系统进行建模,通过数学模型来描述车辆的运动特性,并利用传感器获取实时数据进行反馈控制。
另外,系统还需要具备自主避障和自动导航功能,以提供更加智能化的使用体验。
动力轮椅车的智能化控制系统具备多项主要功能。
首先,它可以根据用户的指令实现自主导航。
通过搭载GPS导航模块和惯性导航系统,系统可以获取当前位置和目标位置信息,进而规划最佳路径,并自动引导车辆前往目的地。
其次,该系统还可以实现智能避障功能。
通过激光雷达和摄像头等传感器,系统能够检测到前方的障碍物,并及时采取避让或刹车等措施,确保用户的安全。
此外,智能化控制系统还可以根据用户的需求,实现自动调节车辆速度和座椅角度等功能,以确保用户的舒适性和便捷性。
智能化控制系统的应用场景多种多样。
首先,它可以广泛应用于医疗机构和康复中心,为行动不便的患者提供便捷的交通工具。
通过智能化控制系统的帮助,患者可以自主前往医院或康复中心,减轻家庭成员的照顾压力。
另外,智能化控制系统也适用于老年人群体。
随着老龄化社会的到来,越来越多的老年人出行需求增加。
智能化控制系统可以根据老年人的健康状况和需求,提供个性化的交通解决方案,增加他们的生活质量。
此外,智能化的轮椅车还可以在公共场所和商业中心等场景中应用,提供给临时需要的人们快捷的出行方式。
当然,动力轮椅车的智能化控制系统的开发和应用也面临一些挑战。
首先,技术层面上存在一些难点,比如控制算法的设计和优化、传感器的准确性和可靠性等。
智能轮椅运动控制系统开发
智能轮椅运动控制系统开发
随着人口老龄化趋势的加剧,智能轮椅作为重要的辅助设备,逐渐成为解决老年人和残障人士出行难题的重要工具。
智能轮椅运动控制系统的开发,将为用户提供更舒适、安全、便捷的出行体验。
智能轮椅运动控制系统的核心是通过智能化技术实现对轮椅的自动导航和运动控制。
该系统采用传感器、摄像头、定位系统等多种技术手段,实时感知周围环境和用户的需求,从而智能地规划轮椅的运动路径和速度。
在轮椅的自动导航方面,智能轮椅运动控制系统能够通过激光雷达、红外线传感器等装置,实时监测周围障碍物的位置和距离,并基于这些信息进行路径规划。
当轮椅接近障碍物时,系统能够自动减速或停止,以确保用户的安全。
此外,智能轮椅运动控制系统还具备用户体征检测和智能识别功能。
通过心率、体温、呼吸等生理参数的监测,系统能够准确判断用户的健康状况,并根据用户的需求和能力调整轮椅的运动方式。
同时,系统还能通过人脸识别、语音识别等技术,实现与用户的智能交互,提供个性化的服务。
为了确保智能轮椅运动控制系统的稳定性和可靠性,开发团队还需要对系统进行全面的测试和优化。
在测试阶段,团队将通过模拟不同场景和情况,对系统的各项功能进行评估和验证。
同
时,团队还将持续收集用户反馈和意见,不断改进系统的性能和用户体验。
总之,智能轮椅运动控制系统的开发将为老年人和残障人士带来巨大的福利。
它不仅能够提供更加智能化的导航和运动控制功能,还能通过用户体征检测和智能识别,为用户提供个性化的服务。
未来,随着技术的进一步发展和创新,智能轮椅运动控制系统将不断完善,为用户提供更加便捷、安全、舒适的出行体验。
动力辅助手动轮椅车的智能化控制系统开发与应用

动力辅助手动轮椅车的智能化控制系统开发与应用随着科技的不断进步,智能化控制系统在各个领域的应用已成为一种趋势。
在医疗保健领域,特别是为行动不便的人群提供便利的移动解决方案方面,动力辅助手动轮椅车的智能化控制系统具有巨大的潜力。
本文将探讨动力辅助手动轮椅车智能化控制系统的开发与应用。
一、动力辅助手动轮椅车的智能化控制系统概述动力辅助手动轮椅车的智能化控制系统主要由硬件和软件两部分构成。
硬件部分包括轮椅车的电机、传感器、功率控制器等设备,用于实现智能化的传感、运动和控制功能。
软件部分则负责数据处理、算法运算和控制指令的生成,实现对轮椅车运动的智能化控制。
二、动力辅助手动轮椅车智能化控制系统的开发1. 硬件设计在硬件设计方面,需要考虑轮椅车的载荷能力、电池容量、电机功率等因素,以确保系统的可靠性和稳定性。
同时,需要选用合适的传感器,如倾斜传感器、压力传感器等,以获取轮椅车的运动状态和使用者的需求。
此外,还需要设计适合安装的机械结构,以便轮椅车的电机能够与轮椅车连接并提供辅助动力。
2. 软件开发在软件开发方面,首先需要采集传感器数据,并进行数据处理和滤波,以获得准确的运动状态。
接下来,需要设计运动控制算法,以根据使用者的动作指令和环境条件来控制轮椅车的运动。
常用的控制算法包括PID控制算法、模糊控制算法等。
最后,将控制指令通过无线通信或有线传输发送给轮椅车的电机,实现智能化的动力辅助功能。
三、动力辅助手动轮椅车智能化控制系统的应用1. 自主导航动力辅助手动轮椅车的智能化控制系统可以通过激光雷达、摄像头等感知设备获取周围环境的信息,并配合SLAM算法实现自主导航功能。
使用者只需在目的地附近操作对应的按钮或手柄,轮椅车将根据实时的环境感知和路径规划进行自主导航,避开障碍物,并安全到达目的地。
2. 智能遥控动力辅助手动轮椅车的智能化控制系统还可以通过智能手机等终端设备实现智能遥控功能。
使用者可以通过手机上的App或者虚拟现实设备操控轮椅车的运动,同时还能通过实时视频传输了解轮椅车周围的环境情况,有效提高使用者的操作便利性和安全性。
基于STM32的智能轮椅控制系统设计
物联网技术 2020年 / 第8期980 引 言为了更好地服务老年人和残障人士,使其获得更好的帮助,尽可能地融入社会,最大程度地节约人工陪护成本,各国都致力于功能丰富的轮椅的研究。
随着物联网技术的发展,轮椅越来越智能化、人性化。
目前存在的智能轮椅是在电动轮椅的基础上,集合一些人工智能技术,使轮椅具备较好的自主性、适应性与交互性。
本文设计了一种基于STM32的智能轮椅控制系统。
该系统以STM32为控制核心,其利用低功耗控制芯片、高精度传感器、GPS 模块、超声波模块、无线通信模块,实现轮椅的自动感知、可靠控制、无线通信、GPS 定位等多种功能。
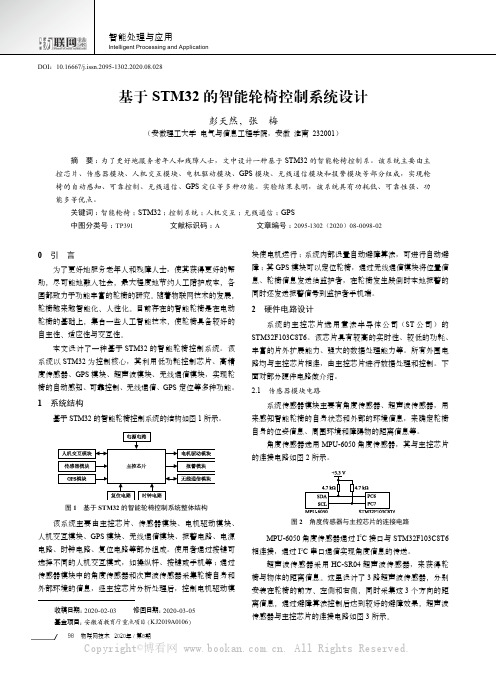
1 系统结构基于STM32的智能轮椅控制系统的结构如图1所示。
图1 基于STM32的智能轮椅控制系统整体结构该系统主要由主控芯片、传感器模块、电机驱动模块、人机交互模块、GPS 模块、无线通信模块、报警电路、电源电路、时钟电路、复位电路等部分组成。
使用者通过按键可选择不同的人机交互模式,如操纵杆、按键或手机等;通过传感器模块中的角度传感器和次声波传感器采集轮椅自身和外部环境的信息,经主控芯片分析处理后,控制电机驱动模块使电机运行;系统内部设置自动避障算法,可进行自动避障;其GPS 模块可以定位轮椅,通过无线通信模块将位置信息、轮椅信息发送给监护者,在轮椅发生跌倒时本地报警的同时还发送报警信号到监护者手机端。
2 硬件电路设计系统的主控芯片选用意法半导体公司(ST 公司)的STM32F103C8T6。
该芯片具有较高的实时性、较低的功耗、丰富的片外扩展能力、强大的数据处理能力等。
所有外围电路均与主控芯片相连,由主控芯片进行数据处理和控制。
下面对部分硬件电路做介绍。
2.1 传感器模块电路系统传感器模块主要有角度传感器、超声波传感器,用来感知智能轮椅的自身状态和外部的环境信息,来确定轮椅自身的位姿信息、周围环境和障碍物的距离信息等。
角度传感器选用MPU-6050角度传感器,其与主控芯片的连接电路如图2所示。
电动轮椅智能导航与控制系统设计与实现
电动轮椅智能导航与控制系统设计与实现近年来,随着人口老龄化的加速和残疾人群体的增加,电动轮椅成为了一种非常重要的辅助工具。
然而,传统的手动操控方式对于某些残障人士来说可能存在困难。
因此,设计一种智能导航与控制系统,为电动轮椅用户提供更加便利和安全的用户体验,已经成为了一个非常重要的问题。
本文将从需求分析、系统设计和实现三个方面,详细介绍电动轮椅智能导航与控制系统的设计与实现。
首先,在需求分析阶段,我们需要了解用户的需求和使用场景,以此为基础进行系统设计和实现。
电动轮椅的智能导航功能是本系统的核心部分。
用户需要提供目的地信息,系统则会通过内置的地图数据和导航算法,规划最佳路径并实时指导用户前往目的地。
同时,系统应当考虑到使用场景的多样性,包括室内和室外环境,具备适应不同环境的导航算法和传感器。
其次,在系统设计阶段,我们需要确定系统的整体架构和各个模块之间的接口。
为了实现智能导航功能,系统需要包括硬件和软件两个方面的设计。
在硬件设计方面,我们需要选择合适的定位传感器、导航模块以及控制器。
其中,定位传感器可以采用GPS、惯性导航传感器等来实现定位和导航功能;导航模块需要包括地图数据的存储与更新、路径规划算法和导航指令的生成等功能;控制器则负责接收用户的输入信息并控制电动轮椅的运动。
在软件设计方面,我们需要开发用户界面、路径规划算法和导航指令生成算法。
用户界面应当简单直观,方便用户提供目的地信息和接收导航指令;路径规划算法需要考虑到多种因素,如道路状况、交通流量和导航优先级等;导航指令生成算法需要将规划得到的路径转化为易于理解和执行的指令,如语音提示或屏幕显示。
最后,在系统实现阶段,我们需要将系统设计的各个模块进行具体的实现和集成。
在实现过程中,要注意观察和测试系统的性能,及时发现和解决问题,保证系统的稳定与可靠性。
在技术实现方面,可以利用现有的智能手机和互联网技术,通过连接智能手机和电动轮椅来实现导航和控制功能。
行走轮椅智能导航控制系统集成

行走轮椅智能导航控制系统集成概述:行走轮椅智能导航控制系统集成是基于现代智能科技发展的创新应用,旨在提供更加便利和可靠的交通工具给行动不便的人群。
通过将智能导航技术与传统行走轮椅结合,可以使用户更加自主地掌控自己的出行。
本文将探讨行走轮椅智能导航控制系统的集成方案及其功能优势。
引言:行动不便的人士往往面临着出行的困难,传统的行走轮椅只能通过手动操作或他人帮助来实现移动。
然而,随着智能科技的不断进步,我们有能力为这一群体提供更加便捷的解决方案。
行走轮椅智能导航控制系统的集成就是为了满足这一需求而开发的。
主体:1. 系统设计和集成行走轮椅智能导航控制系统的集成需要多个关键技术的结合,包括导航模块、传感器、控制器和人机交互界面。
导航模块可以利用全球定位系统(GPS)和地图数据,提供准确的位置信息和路线规划。
传感器可以用于检测环境情况,例如障碍物检测和避免碰撞。
控制器可以根据导航模块和传感器的数据,自动调整轮椅的行进方向和速度。
人机交互界面可以提供给用户进行操作轮椅的方式,例如语音识别,触摸屏等。
2. 功能优势行走轮椅智能导航控制系统集成的功能优势主要在于提供便利和安全性。
首先,用户可以使用导航模块规划最佳路径,避免迷路或者选择不安全的路线。
其次,传感器能够监测周围环境,及时警告用户有关障碍物或者危险的信息。
这样,用户可以选择避开障碍物或者寻找更安全的路径。
此外,智能导航控制系统还可以和智能家居系统集成,使得用户能够通过语音命令或者遥控器控制轮椅行走和停止。
3. 技术挑战行走轮椅智能导航控制系统集成的实现面临着一些技术挑战。
首先是导航模块的准确性和可靠性,确保系统能够正确识别用户所在位置并提供准确的路线规划。
其次是传感器的灵敏度和可靠性,确保能够及时发现障碍物和环境变化,以避免碰撞和提供准确的警示信息。
还有一个技术挑战是控制系统的可靠性,确保能够准确地响应用户的指令和自动调整行走轮椅的方向和速度。
结论:行走轮椅智能导航控制系统集成是为行动不便的人群提供更加方便和安全的出行方式的一项重要技术创新。
智能轮椅控制系统综述

智能轮椅控制系统综述智能轮椅控制系统综述战仁奎1,吴伟1,程桂娟2,于成龙1(1.沈阳工业大学电气工程学院运动控制研究所 110870;2.沈阳自动控制研究设计院 110016;)摘要:智能轮椅是将智能机器人技术应用于电动轮椅,融合多种领域的研究,包括机器人视觉、机器人导航和定位、模式识别、多传感器融合及用户接口等,涉及机械、控制、传感器、人工智能等技术。
本文将对智能轮椅控制系统的国内外研究现状进行总结,还对控制系统关键技术进行分析,并简单叙述未来的发展趋势。
关键词:智能轮椅;导航;定位;人机接口;0 引言联合国发表报告指出,在21世纪上半叶,老年人口将增加2.3倍,老年人口占总人口的比例将达到20%,全世界人口老龄化进程正在加快。
按照国际标准,沈阳市在上世纪90年代已经步入老龄化社会。
近年的统计资料表明,沈阳市全市常住总人口760万,其中,老年人口约123万,比重为15.8%,并且人口老龄化有日益加剧的趋势。
由于各种灾难和疾病造成的残障人士也逐年增加,他们存在不同程度的能力丧失,如行走、视力、动手及语言等。
为了给老年人和残障人士提供性能优越的代步工具,帮助他们提高行动自由度,让他们能加入到健全人的生活中去,重新融入社会,目前许多国家对智能轮椅进行了研究[1]。
1 智能轮椅控制系统国内外研究现状1.1国外研究现状世界上最早研究智能轮椅要追溯到1986年的英国,随后许多国家都投入重金研究智能轮椅,如法国V AHM项目、美国麻省理工学院Wheelesley项目、西班牙SIAMO项目、德国乌尔姆大学MAID项目等等。
由于各个实验室的目标及研究方法不同,每一种智能轮椅要解决的问题和实现的能力不同[2]。
智能轮椅初期的研究赋予的功能一般都是较低级控制,如简单的行进、速度控制及避障等。
随着机器人控制技术的发展,移动机器人技术大量应用于轮椅,智能轮椅在现实的基础上,具有更好的适应性、自主性、交互性。
麻省理工学院的智能轮椅WHEELESLEY,见图1,具有两种工作模式,手动模式和半自动模式。
电动轮椅智能导航控制系统设计
电动轮椅智能导航控制系统设计摘要本文针对电动轮椅使用者在移动过程中可能遇到的困难和障碍,提出了一种电动轮椅智能导航控制系统设计方案。
该方案基于深度学习技术和激光雷达传感器,通过实时感知周围环境并进行路径规划,实现自动导航功能。
该系统具有较高的精度和可靠性,并且能够提供更好的用户体验。
在实际应用中,该系统可以帮助电动轮椅使用者解决导航问题,提高其生活质量和独立性。
1. 引言随着社会的发展,电动轮椅成为行动不便或行动困难人群的重要辅助工具。
然而,传统的电动轮椅在导航方面存在一定的局限性,缺乏自主性和智能化。
为了提高电动轮椅使用者的生活质量和独立性,本文提出了一种电动轮椅智能导航控制系统的设计方案。
2. 系统架构电动轮椅智能导航控制系统由以下几个模块组成:感知模块、决策模块和执行模块。
感知模块主要负责实时感知周围环境,包括障碍物检测和位置定位。
决策模块根据感知模块的输入进行路径规划,选择最优路径并生成导航指令。
执行模块负责控制电动轮椅的运动,根据导航指令调整轮椅的速度和方向。
3. 感知模块感知模块是电动轮椅智能导航控制系统的关键部分。
该模块包括激光雷达传感器、视觉摄像头和距离传感器。
激光雷达可以提供精确的环境地图信息,用于障碍物检测和定位。
视觉摄像头可以捕捉周围的图像信息,用于识别人和物体。
距离传感器可以用于测量电动轮椅与障碍物之间的距离,避免碰撞。
4. 决策模块决策模块主要根据感知模块提供的信息进行路径规划和导航指令生成。
路径规划算法使用深度学习技术,通过训练神经网络模型来预测最优路径。
导航指令生成算法根据路径规划结果生成相应的指令,例如转向角度和速度控制。
5. 执行模块执行模块负责控制电动轮椅的运动。
该模块通过控制电动轮椅的电动机和转向器来实现轮椅的运动控制。
根据导航指令,执行模块调整电动轮椅的速度和方向,使其按照预定路径自动导航。
6. 系统性能评估为了评估电动轮椅智能导航控制系统的性能,我们进行了一系列的实验和测试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
鑴戞帶鏅鸿兘杞鎺у埗绯荤粺鎽? 瑕侊細涓鸿韩浣撻珮搴︾槴鐥殑娈嬬柧浜哄+鑳藉鑷敱绉诲姩锛屾彁鍑轰簡涓€绉嶅熀浜庤剳鏈烘帴鍙e疄楠屽钩鍙癇CI2000鐨勮嚜鍙戞兂璞℃帶鍒惰疆妞呯殑鏂版柟娉曘€傝鎺у埗绯荤粺涓昏鐢盓motiv鑴戠數閲囬泦瑁呯疆銆佷竴鍙扮瑪璁版湰鐢佃剳銆佷竴涓崟鐗囨満鎺у埗鍣ㄧ粍鎴愶紝瀵归噰闆嗙殑淇″彿杩涜鏃堕鐗瑰緛鍒嗘瀽锛屽苟鍒╃敤鏀硅繘鐨勬劅鐭ュ櫒绠楁硶瀵逛俊鍙疯繘琛屽垎绫汇€傚埄鐢ㄦ彁绀鸿璇曡€呮兂璞″乏鍙虫墜杩愬姩鐨勮剳鐢典俊鍙风壒寰侊紝瀹炵幇瀵硅疆妞呯殑宸﹁浆鍜屽彸杞殑鎺у埗锛屽浠婂悗杩涗竴姝ョ爺绌惰疆妞呯殑绮剧‘鎺у埗绯荤粺鍏锋湁閲嶈鐨勬寚瀵兼剰涔夈€?鍏抽敭璇嶏細 Emotiv锛汢CI2000锛涜剳鎺э紱鏅鸿兘杞鑴?鏈烘帴鍙CI(Brain-Computer Interface)鏄竴绉嶅埄鐢ㄨ剳閮ㄧ缁忓彂鍑虹殑淇℃伅涓庤绠楁満鎴栧叾浠栧閮ㄨ澶囬€氫俊鐨勭郴缁焄1]銆傚熀浜庡ご鐨殑鑴戠數淇″彿鍙互鍙嶆槧澶ц剳鐨勪笉鍚岀姸鎬侊紝涓旇褰曠畝鍗曘€佹棤鍒涳紝鑳藉瀹炴椂鍦拌繘琛屼俊鍙风殑鎻愬彇鍜屽垎绫伙紝鍦ㄧ洰鍓嶈剳-鏈烘帴鍙g爺绌朵腑鏄渶澶氱殑[2]銆?浼犵粺鐨勮疆妞呬汉鏈轰氦浜掔敱澹伴煶銆佹憞鏉嗗拰鎸夐敭绛夊疄鐜般€傜劧鑰屽浜庨珮浣嶇槴鐥笉鍏峰璇█鑳藉姏鐨勪汉鏉ヨ锛岄€氳繃BCI杩欑鎶€鏈彲浠ュ緢濂藉湴甯姪浠栦滑瀹炵幇鎰忓康鎺у埗澶栭儴璁惧鐨勬効鏈涖€傜洰鍓嶉殢鐫€BCI鎶€鏈殑鍙戝睍锛屽疄鐜板ぇ鑴戞帶鍒跺閮ㄨ澶囧彉寰楄秺鏉ヨ秺鏈夊彲鑳姐€傚湪鍥藉锛孎arwell绛変汉灏卞埄鐢ㄨ剳鐢典俊鍙蜂腑鐨凱300寮€鍙戜簡铏氭嫙鎵撳瓧鏈猴紝鍙互瀹炵幇鎰忓康鎺у埗鏂囧瓧鐨勮緭鍏3]銆傚悓鏃讹紝鍦ㄧ幇鏈夎剳鐢垫帶鍒剁殑鏅鸿兘杞绯荤粺涓紝鍙互鍒╃敤闂溂鏀炬澗鐨勮剳鐢典俊鍙风殑Alpa娉㈠拰宸﹀彸鎵嬭繍鍔ㄦ兂璞¤剳鐢典俊鍙风殑Beta娉㈡潵瀹炵幇瀵硅疆妞呯殑鎺у埗[4]銆傝€岃剳鐢典俊鍙峰緢寰急涓旀槗鍙楀閮ㄧ幆澧冪殑骞叉壈[5]锛屽叾澶勭悊鐨勭畻娉曚篃闈炲父澶嶆潅銆傚浜庡埄鐢ㄨ剳鐢典俊鍙疯繘琛屾帶鍒剁殑绯荤粺锛屽鐞嗚剳鐢电殑姝ラ涓€鑸寘鎷俊鍙风殑婊ゆ尝銆佺壒寰佹彁鍙栥€佷俊鍙峰垎绫诲拰杞崲銆傝剳鐢电壒寰佹彁鍙栨柟娉曚富瑕佹湁灏忔尝(鍖?鍒嗘瀽銆佸姛鐜囪氨娉曞拰鍏辩┖闂存ā鍨嬬瓑銆傝€岃剳鐢典俊鍙风殑鍒嗙被鏂规硶涓渶涓昏鐨勫寘鎷嚎鎬у垽鍒硶銆佹敮鎸佸悜閲忔満娉曞拰浜哄伐绁炵粡缃戠粶绛塠6]銆?鐢变簬鑴戞満鎺ュ彛鐨勭爺绌跺緢澶嶆潅锛岃澶氬鐞嗙畻娉曚篃鍙槸澶勪簬绂荤嚎鐨勭悊璁虹爺绌堕樁娈碉紝瀹為檯鎿嶄綔鐨勫彲闈犳€т篃鏈夊緟鎻愰珮銆傛湰鏂囦富瑕佺爺绌朵簡鑴戠數鏁版嵁鐨勭绾垮鐞嗘柟娉曪紝杩愮敤AR妯″瀷浼拌鏂规硶楠岃瘉浜嗘兂璞℃暟鎹殑鍙垎绂绘€э紝鐒跺悗浣跨敤鎰熺煡鍣ㄧ畻娉曞淇″彿鐨勭壒寰佽繘琛屽垎绫伙紝骞跺熀浜嶣CI2000骞冲彴灏嗗叾杞崲涓烘帶鍒朵俊鍙凤紝杈惧埌浜嗘帶鍒跺閮ㄨ疆妞呰澶囩殑鐩殑銆傝鎿嶄綔骞冲彴鐨勪紭鐐规槸锛氫笉鍒╃敤浜轰綋鐨勮偄浣撳姩浣滃氨鍙互瀹炵幇瀵硅疆妞呰繍鍔ㄦ柟鍚戠殑鎺у埗锛屾垚鏈緝浣庯紝涓鸿鍔ㄦ湁闅滅鐨勬畫鐤句汉澹彁渚涗簡涓€涓嚜鐢辩殑鎺у埗骞冲彴锛屽浠婂悗杩涗竴姝ュ疄鐜拌疆妞呯殑闆嗘垚鎺у埗鏈夐噸瑕佹剰涔夈€?1 BCI2000璇曢獙骞冲彴BCI2000鏄竴绉嶈兘鎻忚堪浠绘剰BCI绯荤粺鐨勬ā鍨嬶紝璇ユā鍨嬬敱4涓浉浜掕仈绯荤殑鍔熻兘妯″潡鏋勬垚锛氭暟鎹幏鍙栨ā鍧楋紙鏁版嵁鐨勯噰闆嗗拰瀛樺偍锛夈€佷俊鍙峰鐞嗘ā鍧椼€佺敤鎴峰簲鐢ㄧ▼搴忔ā鍧椼€佹搷浣滃憳妯″潡锛屻€傝繖4涓ā鍧楀悇鑷垎绂伙紝骞堕€氳繃TCP/IP鍗忚杩涜鐩镐簰閫氫俊[7]銆?鍦˙CI2000绯荤粺杩愯杩囩▼涓紝姣忔鏁版嵁鑾峰彇妯″潡鑾峰緱涓€缁勮剳鐢垫暟鎹悗锛屽氨鍙戦€佺粰淇″彿澶勭悊妯″潡锛屽湪姝ゅ鑴戠數鏁版嵁杩涜淇″彿鐨勭壒寰佹彁鍙栧拰妯″紡鍒嗙被锛屽苟灏嗗垎绫荤殑缁撴灉杞寲涓烘帶鍒跺懡浠ゅ彂閫佺粰鐢ㄦ埛搴旂敤妯″潡銆傛瘡涓ā鍧楀悇鑷疄鐜拌嚜宸辩殑鍔熻兘锛屽畠浠箣闂寸殑閫氫俊鍗忚涓嶅彈淇″彿鐨勯€氶亾鏁板拰閲囨牱鐜囥€佷俊鍙峰鐞嗙殑澶嶆潅搴﹀拰鎵€闇€瑕佹帶鍒剁殑澶栭儴璁惧绛夊洜绱犵殑闄愬埗[7]銆?2 鑴戠數淇″彿鍒嗘瀽2.1 鐗瑰緛鍒嗘瀽鍦ㄦ兂璞¤繍鍔ㄤ腑Mu鑺傚緥鐨勮兘閲忛珮浣庡強鍒嗗竷鍙敤浜庡鏁版嵁杩涜鍒嗙被锛屽苟涓斿彲浠ラ€氳繃璁粌鐢ㄦ埛鎺у埗Mu鑺傚緥鐨勮兘閲忛珮浣庡拰鍒嗗竷鐘跺喌鏉ュ疄鐜板澶栭儴璁惧鐨勬帶鍒禰8]銆傛湰璁捐鍒╃敤Mu鑺傚緥鐨勮兘閲忓箙鍊煎彉鍖栨潵鐮旂┒浜鸿剳涓嬭揪涓嶅悓杩愬姩鎰忚瘑鎸囦护鏃禘EG鐨勮〃鐜扮壒寰侊紝骞朵笖灏嗘椂鍩熺壒寰佷笌棰戝煙鐗瑰緛缁撳悎浣滀负鏃堕鐗瑰緛銆傚疄楠屼腑锛屽埄鐢ㄥ埡婵€鐣岄潰浣胯璇曡€呰繘琛屽乏鍙虫墜杩愬姩鐨勬兂璞″姩浣滐紝浠庢彁绀哄埌缁撴潫鐨勬椂闂翠负9 s锛屽悓鏃惰褰曚笅琚瘯鑰呯殑鑴戠數鏁版嵁锛屽皢閫氳繃鐢佃剳閲囬泦鐨勮剳鐢垫暟鎹瓨鍌ㄥ埌璁$畻鏈哄唴銆傛渶鍚庡埄鐢∕ATLAB杩涜鏁版嵁鍒嗘瀽锛屾彁鍙栬剳鐢垫暟鎹殑鐗瑰緛鍚戦噺銆?Mu鑺傚緥澶勪簬(8锝?2)Hz棰戝甫锛岀敱浜嶮u鑺傚緥鍦ㄨ繍鍔ㄧ毊灞傚尯鍩熻褰曪紝涓庝汉浣撹繍鍔ㄥ姛鑳界揣瀵嗙浉鍏砙9]锛岄€夊彇5闃跺甫閫氭き鍦嗘护娉㈠櫒瀵瑰疄楠屾暟鎹繘琛?8锝?2)Hz甯﹂€氭护娉紝婊ゆ尝鍚庢兂璞″乏鎵嬭繍鍔ㄧ殑涓や釜閫氶亾鐨勬尝褰€?鍚屾椂閲囩敤Burg绠楁硶瀵瑰師濮嬭剳鐢典俊鍙疯繘琛孉R妯″瀷璋变及璁°€傜粡杩囪瘯楠屽彂鐜帮紝閫夊彇闃舵涓?0鑳戒娇寰楅娴嬭宸姛鐜囨渶灏忥紝寰楀埌鐨勫垎绫绘晥鏋滆緝涓虹悊鎯炽€傚浘3涓鸿剳鐢垫暟鎹湪鍩轰簬Burg绠楁硶涓嬬殑AR妯″瀷璋变及璁″浘銆?缁忚繃浜嗘椂鍩熷拰棰戝煙鍒嗘瀽鍚庯紝灏嗘椂鍩熺壒寰佸拰棰戝煙鐗瑰緛缁撳悎璧锋潵锛岀粍鎴愭椂棰戣仈鍚堢壒寰佷綔涓哄垎绫荤壒寰佸悜閲忥紝鐢ㄤ簬鍚庣画鐨勫垎绫荤爺绌躲€?2.2 淇″彿鍒嗙被閲囩敤鏀硅繘鐨勭嚎鎬ф劅鐭ュ櫒鍑嗗垯浣滀负璁粌鍒嗙被鍣ㄥ噯鍒欙紝浣垮緱骞冲潎鍒嗙被鍑嗙‘鐜囪揪鍒?77.1%锛屽垎绫绘晥鏋滆壇濂姐€傚彟澶栵紝鍦ㄦ帰绱㈡渶浣冲垎绫荤壒寰佹椂闂存鐨勮繃绋嬩腑锛岄噰鐢ㄧ被浼间簬鍦ㄧ嚎鍒嗘瀽鐨勬柟娉曪紝鏄撲簬鐭ラ亾鍦ㄥ湪绾垮垎绫绘椂(濡備互1.5 s涓烘椂闂存杩涜椤虹Щ鐨勫湪绾垮垎绫绘椂)浠€涔堟椂鍊欒繘琛屽垎绫绘娴嬫晥鏋滄渶濂斤紝涓哄疄鐜板湪绾垮垎绫绘彁渚涜壇濂界殑鍙傝€冦€?鍒╃敤鎰熺煡鍣ㄧ畻娉曞鏍锋湰鐗瑰緛杩涜鍒嗙被锛屽熀鏈畻娉曞涓嬶細(1)璁惧悇涓潈鐭㈤噺鐨勫垵鍊间负0锛屽嵆w1=w2=鈥?wM=0锛孧涓哄垎绫绘暟銆?(2)绗琸娆¤緭鍏ヤ竴涓牱鏈琗(k)锛岃绠楃k娆¤凯浠h绠楃殑缁撴灉涓猴細寰幆鎵ц绗?2)姝ワ紝鐩村埌杈撳叆鎵€鏈夌殑鏍锋湰鏉冮噸閮戒笉闇€瑕佷慨姝d负姝10]銆?3 鎺у埗绯荤粺鐨勭粍鎴愬強鏋勬灦鑴戞帶鏅鸿兘杞鐨勬帶鍒剁郴缁熶富瑕佺敱鑴戠數閲囬泦瑁呯疆銆佽繍琛屼簬鐢佃剳鐨凚CI2000杞欢骞冲彴銆佽摑鐗欒緭鍑恒€佺數鏈烘帶鍒剁瓑閮ㄥ垎缁勬垚銆傝鎺у埗绯荤粺鐨勭粨鏋勫浘銆?3.1 EEG淇″彿閲囬泦鍜屽鐞?鑴戠數淇″彿閲囬泦浣跨敤Emotive閲囬泦瑁呯疆锛岄噰鏍风巼涓?28 Hz锛岀數鏋佹寜鐓у浗闄?0-20鏍囧噯鐢垫瀬瀹夋斁娉曞畨鏀俱€傜數鏋佷綅缃€?鍒嗗埆閲囬泦杩愬姩鎯宠薄鐨勮剳鐢垫暟鎹紝杩涗竴姝ュ緱鍒扮壒寰佹墍鍦ㄩ€氶亾锛屾兂璞″彸鎵嬫椂鍦‵C6涓婃湁鏄庢樉鍙樺寲锛屽悓鐞嗕粠閲囬泦鐨勬尝褰㈠強鍚庨潰鐨勭绾垮垎鏋愪腑閫夋嫨FC5鍜孎C6浣滀负鍒嗘瀽閫氶亾銆傚悓鏃剁湪鐪间俊鍙风敱F7閫氶亾閲囬泦銆傚叾涓€淐MS鈥濆拰鈥淒RL鈥濇槸鍙傝€冪數鏋併€?鐢盓motiv璁惧閲囬泦鐨勪俊鍙蜂负澶寸毊鐨勫師濮嬭剳鐢典俊鍙凤紝鍚屾椂灏嗕俊鍙疯繘琛屾斁澶у拰鏁板瓧鍖栵紝寰楀埌鏁板瓧鍖栫殑EEG淇″彿銆侭CI2000鑴戞満鎺ュ彛骞冲彴鍏峰鏁版嵁閲囬泦妯″潡锛屾鏃朵娇璇ュ钩鍙拌兘澶熸敹闆嗗埌Emotiv鑴戠數閲囬泦瑁呯疆鐨勪俊鍙凤紝瀹屾垚閰嶇疆宸ヤ綔灏嗙郴缁熼『鍒╄皟閫氥€侲motiv.exe搴旂敤绋嬪簭璇诲彇閲囬泦杞欢Emotiv鐨勮剳鐢甸噰闆嗕俊鍙凤紝閾炬帴鎴愬姛鍚庣殑閲囬泦鐣岄潰銆?StimulusPresentation.exe搴旂敤绋嬪簭浼氭樉绀烘墍璁捐鐨勫埡婵€鐣岄潰锛岋紝鎻愮ず浣跨敤鑰呰繘琛屽乏鍙虫墜鐨勮繍鍔ㄦ兂璞°€傞噰闆嗗櫒鐨勫弬鏁拌缃琛?鎵€绀恒€?閫夋嫨閫氶亾FC5銆丗C6閫氶亾杩涜淇″彿澶勭悊銆傚埄鐢∕ATLAB缂栧啓淇″彿澶勭悊绋嬪簭锛岃幏寰楁劅瑙夎繍鍔ㄨ妭寰嬪弬鏁帮紝鍒╃敤宸查獙璇佺殑绠楁硶杩涜鐗瑰緛鐨勬彁鍙栧拰鍒嗙被锛屽悓鏃惰浆鎹负鐩稿簲鐨勬帶鍒舵寚浠ゃ€?3锛? 澶栭儴鎺ュ彛绋嬪簭BCI2000鐨勫閮ㄧ▼搴忔帴鍙?AppConnector)鎻愪緵浜咮CI2000涓庤繍琛屽湪鍚屼竴璁$畻鏈烘垨灞€鍩熺綉鍐呭叾浠栦笉鍚岃绠楁満涓婄殑澶栭儴绋嬪簭杩涜鍙屽悜鏁版嵁浜ゆ崲鐨勯€氶亾[7]銆傞€氳繃澶栭儴绋嬪簭鎺ュ彛锛屽閮ㄥ簲鐢ㄧ▼搴忓彲浠ヨ/鍐橞CI2000鐨勭姸鎬佸悜閲忓拰鎺у埗淇℃伅銆侭CI2000浠嶤onnectorInputAddress鍙傛暟鎸囧畾鐨勬湰鍦癐P socket涓婅鍙朅ppConnector淇℃伅锛屽苟鎶婁俊鎭啓杩汣onnectorOutputAddress鍙傛暟鎸囧畾鐨剆ocket涓婏紝socket鐢变竴涓湴鍧€/绔彛缁勫悎鏉ユ寚瀹氾紝鍦板潃涓庣鍙d箣闂寸敤鍐掑彿鏉ユ寚瀹氾紝瀹為獙璁惧畾涓簂ocalhost锛?0230銆?鍒╃敤AppConnector鎺ュ彛鏉ユ帶鍒跺閮ㄨ澶囨剰鍛崇潃澶栭儴璁惧蹇呴』鍦˙CI2000涔嬪瀹屾垚锛岀浉搴旂殑鍙傛暟涓嶉殢鏁版嵁鏂囦欢涓€璧峰瓨鍌ㄣ€傚缓绔嬪閮ㄥ簲鐢ㄧ▼搴忥紝姝ょ▼搴忓熀浜嶮FC鍒涘缓锛岄鍏堝垱寤轰竴涓猆DP socket锛岄€氳繃璇诲彇ResultCode鐘舵€佹潵鑾峰彇鍒嗙被缁撴灉锛岄€氳繃璁剧疆绔彛鏉ョ洃鍚墍璁剧疆鐨刄DP绔彛鐨勪俊鎭紝璇诲彇鐢盨ignalProcessing璁$畻寰楀埌鐨勬帶鍒朵俊鍙枫€傛墍浠ュ垱寤哄熀浜嶮FC鐨刄DP鐩戝惉绋嬪簭鏃讹紝灏嗙洃鍚埌鐨勬帶鍒朵俊鎭埄鐢⊿erialPort绫昏浆鎹负USB杈撳嚭銆傝浆鎹㈢▼搴忓涓嬶細void CIPDlg::OnSend(){//TODO锛欰dd your control notification handler code hereif(!m_bOpenPort) return;//妫€鏌ヤ覆鍙f槸鍚︽墦寮€锛屽鏋滄病鎵撳紑锛屽垯閫€鍑?m_Port.WriteToPort((LPCTSTR)getbate);//鍙戦€佹暟鎹?}鍦ㄦ锛孶SB杈撳嚭杩炴帴钃濈墮閫氫俊妯″潡锛屾妸鎺у埗淇℃伅浠ヨ摑鐗欑殑褰㈠紡杈撳嚭鍒拌疆妞呯數鏈虹殑鎺у埗妯″潡澶勩€傚綋鎶婂熀浜庤摑鐗欎紶杈撶殑USB鍙f彃杩涚數鑴戞椂锛屾墍鍒涘缓鐨剋heelchair control interface杞欢浼氳嚜鍔ㄨ瘑鍒覆鍙o紝鑱旈€氫紶杈撲俊鍙枫€傛鏃讹紝鍙渶鎶婄數鑴戞斁鍦ㄨ疆妞呴檮杩戝锛屽氨鍙互璁╀娇鐢ㄨ€呭湪涓嶆惡甯︾數鑴戠殑鎯呭喌涓嬶紝杈惧埌鎺у埗杞杩愬姩鐨勭洰鐨勩€備笂浣嶆満銆?3.3 纭欢鐢佃矾瀹炵幇鎺у埗淇″彿缁忚繃钃濈墮浼犺緭妯″潡缁欐帶鍒舵澘锛屾帶鍒舵澘鎺ユ敹鍒版帶鍒朵俊鍙凤紝缁ц€岄┍鍔ㄧ數鏈烘帶鍒舵ā鍧楁帶鍒剁數鏈鸿浆鍔紝瀹炵幇鎺у埗杞鐨勮繍鍔ㄣ€傝€冭檻瀵硅姱鐗囨€ц兘鐨勮姹傚拰瀹為檯鐨勬帴鍙e簲鐢紝閫夋嫨STM32F103鍗曠墖鏈轰綔涓轰富鎺ц姱鐗囥€係TM32F103鏈変笓闂ㄤ负鐢垫満鎺у埗鑰岃瀹氱殑楂樼骇瀹氭椂鍣紝甯︽湁6涓鍖烘椂闂村彲缂栫▼鐨凱WM杈撳嚭閫氶亾锛屽悓鏃跺叾甯︽湁鐨勭揣鎬ュ埗鍔ㄥ彲浠ュ湪寮傚父鎯呭喌鍑虹幇鏃跺己杩玃WM淇″彿杈撳嚭淇濇寔鍦ㄤ竴涓瀹氬ソ鐨勫畨鍏ㄧ姸鎬侊紝鍦ㄥ叿澶囬珮鎬ц兘琛ㄧ幇鐨勫悓鏃朵繚鎸佷簡浣庡姛鑰楃壒鎬11]銆傛帶鍒跺櫒閮ㄥ垎鐢佃矾鍥俱€?妯″潡鐢盡CU(STM32F103)銆佽摑鐗欐帴鏀舵ā鍧椼€丩ED鏄剧ず涓夊ぇ閮ㄥ垎缁勬垚锛屼富瑕佸伐浣滃師鐞嗕负锛氳摑鐗欐ā鍧楁帴鏀剁數鑴慤SB杈撳嚭鐨勮剳鐢典俊鍙凤紝浼犺嚦MCU杩涜淇″彿鐨勮瘑鍒紝杩涜€屾帶鍒剁數鏈虹殑杩愯浆锛岃揪鍒版帶鍒惰疆妞呮柟鍚戠殑鐩殑銆傜敱浜庣數鍔ㄨ疆妞呬娇鐢ㄨ搫鐢垫睜渚涚數锛屽疄楠屼腑鍒╃敤钃勭數姹犵粰鎺у埗鏉夸緵鐢碉紝鐢垫簮杞崲鐢佃矾銆?4 缁撴灉鍒嗘瀽鏈枃鍒╃敤BCI2000寮€婧愯蒋浠讹紝杩炴帴Emotiv鑴戠數閲囬泦瑁呯疆锛屽鏅鸿兘杞鐨勬帶鍒剁郴缁熻繘琛屼簡纭欢鍜岃蒋浠剁殑璁捐锛屽疄鐜颁簡鎰忓康鎺у埗杞鐨勭洰鐨勩€傞€氳繃瀹為獙缁撴灉鍙互寰楀埌锛屽湪鍒╃敤BCI2000鐨勫熀纭€涓婏紝缁撳悎MFC绋嬪簭锛屾妸鑴戠數淇″彿鐨勯噰闆嗐€佽瘑鍒€佸垎绫诲拰浼犺緭绛夊姛鑳藉悎鎴愪负涓€涓钩鍙帮紝鏈夊姪浜庣畝鍖栫‖浠剁數璺殑澶嶆潅鎬с€傝繖鏍峰彲浠ラ檷浣庣‖浠跺鐞嗙殑澶嶆潅搴︼紝鍚屾椂闄嶄綆浜嗙郴缁熺殑鎴愭湰锛屽叿鏈夎緝楂樼殑搴旂敤浠峰€笺€?闅忕潃鑴?鏈烘帴鍙f妧鏈殑涓嶆柇鍙戝睍锛岀爺绌惰€呭紑鍙戠殑鍚勭寮€婧愮殑杞欢骞冲彴锛屽彲浠ユ柟渚夸娇鐢ㄨ€呯洿鎺ヤ娇鐢ㄧ幇鏈夌殑澶勭悊宸ュ叿锛屼负鑴?鏈烘帴鍙g殑鐮旂┒鎻愪緵浜嗕究鍒╋紝骞惰繘涓€姝ヤ績杩涗簡璇ユ妧鏈殑鍙戝睍銆傛湰鏂囧熀浜庡紑婧愯蒋浠禕CI2000鎼缓鐨勮剳-鏈烘帴鍙g郴缁熷疄鐜颁簡瀹為獙鍙傛暟鐨勮璁″拰绠楁硶鐨勫姞杞斤紝骞跺疄鐜颁娇鐢ㄨ骞冲彴涓庡埄鐢∕FC缂栫▼鐨勮蒋浠剁浉浜掗€氫俊鐨勫姛鑳斤紝鍚屾椂鎺у埗淇″彿涓庢帶鍒舵ā鍧楅€氳繃钃濈墮閫氫俊锛屽疄鐜颁簡鑴戠數淇″彿渚挎嵎鍦版帶鍒剁數鍔ㄨ疆妞呰繍鍔ㄧ殑鐩爣銆?。