电动轮椅系统设计
多功能智能轮椅设计—功能模块的开发设计
多功能智能轮椅设计—功能模块的开发设计摘要全球正在步入一个老龄化的阶段,无论是发达或者是发展中国家,几乎每个国家都在面临着老龄化的问题。
对于很多年迈的老人或者残疾人来说,普通的轮椅无法自己操控,通常还是需要在他人的协助下才可以有效移动。
因此针对轮椅操作方便和运行安全可靠的要求,电动轮椅是比较理想的选择。
然而目前一般的电动轮椅并不具有导航定位和主动避障等功能,电动轮椅的相关功能仍有待持续研究及智能升级。
本次选题面向多功能的智能轮椅,对其中的功能模块进行了开发设计,实现了处理器环境的搭建配置、导航系统与语音识别系统的开发设计。
其中,使用树莓派搭建了ROS 机器人环境,通过激光雷达进行数据收集,采用使用自动与手动控制结合的控制模式,人机交互的操作,实现了智能轮椅自动定位导航和实时避障的功能。
此外,智能轮椅可按照使用者的控制/语音指令进行目标点的路线规划,并在自驱动时不断检测周围环境的数据信息,避开障碍物,实时修正移动路线,确保智能轮椅能够安全准确到达目标地点。
关键词:智能轮椅;树莓派;激光雷达;自动导航;语音识别Multi-functional intelligent wheelchair design -the development anddesign of functional modulesAbstractThe world is entering a stage of aging, whether developed or developing countries, almost every country is facing the problem of aging. For many elderly people and people with disabilities, a normal wheelchair cannot operate on its own and often requires the help of others to move effectively. Thus, the requirements for ease of use and reliability of wheelchairs are a relatively ideal solution. However, at present, the general electric wheelchair does not have the functions of navigation, positioning and active obstacle avoidance.This topic focuses on the multifunctional intelligent wheelchair, setting and designing function modules, as well as the structure and configuration of the processor, and the construction and configuration of the processor environment. The development and design of the navigation system and the speech recognition system are realized. Among them, raspberry PI is used to build ROS robot environment, data collection is carried out through lidar, control mode combining automatic and manual control is adopted, and man-machine interactive operation is adopted to realize the functions of automatic positioning and navigation of intelligent wheelchair and real-time obstacle avoidance. In addition, the intelligent wheelchair can plan the route of the target point according to the user's control/voice command, continuously detect the data information of the surrounding environment, avoid obstacles, andmodify the movement route in real time during the self-drive to ensure that the intelligent wheelchair can reach the target site safely and accurately.Keywords: intelligent wheelchair; Raspberry pie; Lidar; self-navigation; Speech recognition目录1 绪论 (3)1.1 智能轮椅研究意义 (3)1.2 发展历程和研究现状 (4)1.3 本文的研究思路 (5)2 导航系统的整体方案 (5)2.1 导航系统的工作原理 (6)2.2 导航系统硬件设备 (6)2.3 软件平台选择 (8)2.4 SLAM技术 (10)3 室内地图的构建 (13)3.1 树莓派环境搭建 (14)3.2 ROS环境配置及功能包的安装 (15)3.3 建立地图 (16)4 路径规划与控制 (23)4.1 全局路径规划 (25)4.2 本地实时规划 (27)4.3 机器人配置 (28)4.4 代价地图Costmap (30)5 语音识别系统设计 (35)5.1 工作原理 (35)5.2 语音识别配置 (35)5.3 语音控制 (36)6 仿真与展示 (37)6.1 机器人仿真模型 (37)6.2 Gmapping_slam (38)6.3 语音识别与控制 (40)7 结论与展望 (41)参考文献 (42)致谢............................................................................................................................................. 错误!未定义书签。
电动轮椅运动控制系统设计【控制理论与控制工程专业优秀论文】

电动轮椅是一种以蓄电池为能源、电机驱动的轮椅车。适于下肢残疾、高位截瘫或偏瘫以及年老体弱 者使用,是一种比较理想的移动或代步工具。
目前,国外对电动轮椅的研究已相对比较成熟。他们已开发出各种各样的适合 不同用户群体的电动轮椅,并逐渐向智能化的方向发展。现在高性能电动轮椅生产 厂家多集中在美国、德国、澳大利亚和西班牙,中国台湾也有电动轮椅生产厂家。 然而,国内对电动轮椅的研究技术依然远远落后于国外,绝大多数轮椅厂家都只生 产电机和座椅而不生产控制器,基本上都依赖于进口。因此,研究高性能低成本的 电动轮椅驱动器,替代进口填补国内技术空白具有重要意义。
分析设计的系统通过系统运行实验性能良好,达到了预期设计目标。
关键词:电动轮椅控制器 双电机协调控制 S 曲线 故障检测
I
Abstract
Electric powered wheelchair (EPW) is a wheeled vehicle which takes storage battery as power and motor as driving with characteristics of labor saving, easy operation, stable speed, free-pollution and low noise. It very benefits for the people with lower or upper extremely impairment, the old or the valetudinarians. To these people, EPW is their primary and ideal means of mobility.
Currently, some overseas countries they are very experienced in researching EPWs. They have developed various kinds of EPWs for sorts of special user group. EPW is becoming more intelligent and tending to be humanization gradually. Now most of the high performance EPW plants they are located in developed countries, such as America, Australia, Germany, Spain and also Taiwan province of China. In addition, domestic research on EPWs techniques falls behind the one of overseas a lot. Mainly most of the national EPWs plants produce DC motor and wheelchair seat only, while controller is imported. Accordingly, it is very significant to develop high performance, low cost and all-digital EPWs controller, while it also fills up the technique blanks of domestic EPWs research technology.
【免费下载】电动轮椅车设计含全套CAD图纸和WORD说明书

毕业论文﹙设计﹚任务书院(系) 机械工程学院专业班级学生姓名1、毕业论文﹙设计﹚题目电动轮椅车设计2、毕业论文﹙设计﹚工作自 2014 年 3 月 5 日起至 2014 年 5 月 28 日止三、毕业论文﹙设计﹚进行地点:四、毕业论文﹙设计﹚的内容要求:1、设计课题简介电动轮椅是一种以蓄电池为能源、电子装置控制驱动的动力轮椅车。
使用者可通过控制装置自行驱动轮椅车行进。
适用于高位截瘫、偏瘫及下肢功能障碍者使用。
本课题主要是设计一款含有机械传动减速机构的电动轮椅,使学生充分利用所学知识,初步锻炼产品的总体设计和研究能力。
2、论文要求:1)通过查阅有关资料,了解产品总体设计的方法和步骤;2)设计的电动轮椅要方便操作使用;3)所确立的设计方案应按照产品总体设计方法和步骤进行,确保科学合理;4)论文应包括对电动轮椅进行安全、强度和力学方面的设计计算数据。
3、工作任务与要求:1)充分了解电动轮椅的结构特点及构造,了解设计的主要内容,并进行市场调查。
2)搜集各类电动轮椅的资料,包括相关的国家标准及最新成果。
3)设计多个方案,并从选出总体设计方案后对总体设计进行细化。
4)对设计进行校核,确保方案的可行性,绘制总装图和关键零件图。
撰写研究设计论文一份。
4.工作任务时间安排:第1-3周:了解产品总体设计的方法和步骤,搜集有关电动轮椅的资料,包括设计的相关国家标准及最新研究成果,撰写毕业设计开题报告一份。
第4-6周:通过市场调查已有的电动轮椅驱动机构结构,设计出相应的总体设计方案。
第7-12周:设计控制方式及电路,绘制总装示意图和关键零件图,撰写毕业论文。
5、设计说明书格式要求:设计说明书应包括:序言、目录、摘要(中英文)、关键词(中英文)、中图分类号、正文(含设计方案论证、设计及其它说明等)、结束语和参考文献等内容,并按照封页、设计任务书、序言、目录、摘要、关键词、正文、结束语、参考文献和封底的顺序装订。
指导教师系(教研室)系(教研室)主任签名批准日期接受论文 (设计)任务开始执行日期学生签名电动轮椅车设计[摘要]:文中首先分析了国内外各种轮椅的状况,在对比总结各自优缺点的基础上,由于直流电机的额定输出转矩较低,不足以驱动后轮克服地面摩擦阻力传动,根据国内实际情况,提出了一种含有机械传动减速机构的电动轮椅,基于这种方案,设计了与之相匹配的减速器及其他传动机构,该方案采用直流电机经减速器与链条连接到后轴,以减低输出转速,增大输出转矩。
多功能电动轮椅关键机构设计与仿真分析
多功能电动轮椅关键机构设计与仿真分析摘要:随着人口老龄化和残疾人口增加,电动轮椅作为一种重要的辅助设备,已经成为现代社会不可或缺的一部分。
本文旨在设计一种多功能电动轮椅,通过对关键机构的设计和仿真分析,提高其性能和安全性,以满足不同用户的需求。
关键词:多功能电动轮椅;关键机构;设计;仿真分析1电动轮椅整体方案设计第一,底座应该采用轻量化材料,如铝合金或碳纤维,以提高整车的稳定性和操控性。
底座上应安装电动驱动系统,包括电机、电池、控制器等,以实现电动推进和转向功能。
同时,底座下方应配备避震系统,以提高车辆的行驶舒适性。
第二,座椅应该具有多种调节功能,如高度调节、倾斜调节、座椅深度调节等。
座椅材料应该采用舒适、透气的材料,如网布或皮革,以提高乘坐舒适度。
座椅后方应配备可调节的头枕,以提供头部支撑。
第三,扶手应该具有多种调节功能,如高度调节、前后调节、旋转调节等。
扶手材料应该采用舒适、防滑的材料,如橡胶或软质塑料,以提高握把舒适度和安全性。
第四,电动轮椅的附加功能应该包括升降、倾斜、折叠等。
升降功能可以帮助用户在不同高度的场合下使用轮椅,如上下楼梯、进出电梯等。
倾斜功能可以帮助用户在不同角度下使用轮椅,如倾斜座椅可以帮助用户进行换位操作。
折叠功能可以方便用户进行携带和存储。
2关键机构设计2.1升降机构设计升降机构是一种能够将轮椅升降到不同高度的装置,它可以帮助行动不便的人士更加方便地进出建筑物、车辆等场所。
设计时需要考虑到多种因素,以确保其功能完备、结构稳定、安全可靠。
(1)功能需求:具备升降、旋转、倾斜等多种功能,以适应不同场合的需求。
例如,在进入车辆时,需要将轮椅升降到车门高度,并旋转90度,以方便进入车内;(2)结构设计:电动轮椅升降机构的结构需要紧凑、稳定、安全。
在设计时需要考虑到轮椅的重量、尺寸、稳定性等因素,以确保升降机构能够承受重量并保持平稳;(3)控制系统:需要配备智能控制系统,以实现升降、旋转、倾斜等功能。
基于电动轮椅车动力转向的智能操控系统设计
基于电动轮椅车动力转向的智能操控系统设计电动轮椅车是一种为行动不便的人士提供移动便利的工具。
为了提高电动轮椅车的操控性能和用户体验,智能操控系统的设计变得尤为关键。
本文将讨论基于电动轮椅车动力转向的智能操控系统的设计原理和功能。
一、系统设计原理1. 动力转向技术电动轮椅车动力转向指的是通过改变不同轮子上的驱动力矢量,实现转向效果。
在传统的电动轮椅车设计中,通常通过电机控制前轮的转向。
然而,这种方式可能导致转向灵活性不足和操控困难。
因此,基于电动轮椅车动力转向的智能操控系统设计应采用更加先进的技术。
2. 转向算法智能操控系统设计中的关键是开发高效、精确的转向算法。
这些算法可根据电动轮椅车的速度、转弯半径和用户输入等信息,实时计算出最佳的转向方案。
例如,可以基于模糊逻辑控制(Fuzzy Logic Control)或者模型预测控制(Model Predictive Control)等方法来实现转向算法。
二、系统设计功能1. 自适应转向基于电动轮椅车动力转向的智能操控系统设计应具备自适应转向功能。
这意味着系统能够根据不同的操控需求和环境条件,自动调整转向方案。
例如,在行驶速度较低时,系统可使电动轮椅车具备更小的转向半径,以便在狭小空间内转弯;而在高速行驶时,则可使电动轮椅车转向更加稳定。
2. 防抱死制动系统(ABS)为了提高安全性能,智能操控系统设计还应包括防抱死制动系统(ABS)。
ABS能够通过减少或控制刹车力度,防止车轮在制动时锁死,从而提高制动稳定性和操控性。
3. 曲线行驶辅助基于电动轮椅车动力转向的智能操控系统设计还应具备曲线行驶辅助功能。
该功能可以通过优化电池电量分配和转向角度控制,帮助电动轮椅车在弯道上更加平稳地行驶,并减少滑动和漂移现象。
4. 避障功能为了提高安全性和用户体验,智能操控系统设计可能还包括避障功能。
该功能利用传感器和算法来监测周围环境中的障碍物,并自动调整行驶方向,以避免碰撞。
电动轮椅车动力转向的智能化控制系统设计
电动轮椅车动力转向的智能化控制系统设计随着人口老龄化程度不断加深,电动轮椅车作为一种重要的辅助交通工具,为行动不便的人提供了更多的自由和独立性。
为确保电动轮椅车的稳定性和操控性能,设计一个智能化的控制系统变得尤为重要。
本文将探讨电动轮椅车动力转向的智能化控制系统设计,并详细阐述其实施方案和设计要点。
一、引言电动轮椅车的动力转向控制系统的设计目标是提高操控性能,提供更好的用户体验。
该系统需要结合传感器技术、电机技术和控制算法来实现智能化控制。
本文将从这三个方面详细阐述电动轮椅车动力转向的智能化控制系统设计。
二、传感器技术在智能化控制系统设计中的应用传感器技术在电动轮椅车动力转向的智能化控制系统设计中起着关键作用。
通过安装合适的传感器,可以实时获取车辆运行的信息和环境数据,从而提供给控制系统,以实现动力转向的智能化控制。
常用的传感器包括速度传感器、角度传感器和力传感器。
速度传感器主要用于测量车辆的速度信息,可以帮助控制系统根据车速进行精准的控制。
角度传感器用于测量转向轮的转角,以便控制系统能准确判断转向的情况。
力传感器用于测量转向力的大小,从而实现动力转向的精确控制。
传感器技术不仅使得控制系统能够实时获取车辆信息,还可以通过传感器的数据判断车辆是否处于危险状态,如过度倾斜、碰撞等情况,从而及时采取相应的控制措施,保证安全性。
三、电机技术在智能化控制系统设计中的应用电动轮椅车的动力转向主要依靠电机系统实现。
为了实现精确控制和高效能的动力转向,需要选用合适的电机并配备相应的控制设备。
在电机选择方面,应考虑功率、转速、扭矩和效率等因素。
根据实际需求,选用合适的电机类型,如直流电机、无刷直流电机或步进电机,并结合控制系统,实现精确的动力转向控制。
控制设备主要包括电机控制器和电池管理系统。
电机控制器负责接收传感器的数据,并根据需要控制电机的转向和转速。
电池管理系统则负责监测电池的电量,以便及时调整电源输出,确保电动轮椅车的稳定运行。
电动轮椅椅面平衡控制系统设计

e n a b l e s k e e p i n g w h e e c l h a i r s u r f a c e i n l e v e l s t o t e i n a n y c se a . T h e c a p a c i t y fs o i g n a l p r ce a s s i n g a n d s h a k e - p r o fp o r o p e r t y m a k e s i t
机 械 设 计 与 制 造
21 0
Ma c h i n e r y De s i g n
&
Ma n u f a c t u r e
第 9期 2 0 1 3年 9月
电动轮椅椅 面平衡控 制 系统设计
张邦成 。 , 王华振 , 王 占礼 - , 郭化超 , 刘铁 军
( 1 . 1 2 ; 2 . 空军航空大学 , 吉林 长春
1 3 0 0 1 2 )
要: 为了调整电动轮椅椅面 因上坡和下坡时由于重力造成的椅面倾斜 , 提 高乘坐的舒适度 , 设 计开发 了轮椅椅 面平
衡控制 系统和椅面平衡调整机构 。 基于 A T me g a 1 6系列单片机, 三轴加速度传感器 MM A 7 3 6 1 芯 片, 设计 了单 片机及传感 器的外 围电路 、 步进 电机驱动电路和 电源电路 , 实现 了对轮椅椅 面的实时检测与控制。系统具有信号调理功能, 防震能力 强, 能够快速检测椅 面的倾斜 角度, 具有高灵敏度 。实验结果表 明, 设计开发 的电动轮椅平衡控制 系统的角度误差 8 < 1 o , 响应时间 t < l s , 性能参数均符合 电动轮椅使用标准 , 达到使 用要求。 关键词 : 加速度传感器 ; 单片机 : 驱动模块 ; 步进电机 中图分 类号 : T H1 6 文献标识码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 9 — 0 2 1 0 — 0 3
电动轮椅运动控制系统的设计
1 引言
随着 时代 的发展 ,我国已经开始步入老龄化社会 , 现 有老年人近 2 亿人 ,而残疾人 也超过 8 千万 人。在老 年人 当中 ,将近有 l 千 万人 下肢行 动不 便,另外 , 每 年新增 因车祸、工伤和其他意外下 肢伤 残者
理 论 研 究
泰工案 收术
2 6 2
电动轮椅运动控制 系统 的设 计
袁玉霞 , 赵明冬 ( 郑州科技学院 电气 工程学 院 , 郑州 4 5 0 0 6 4)
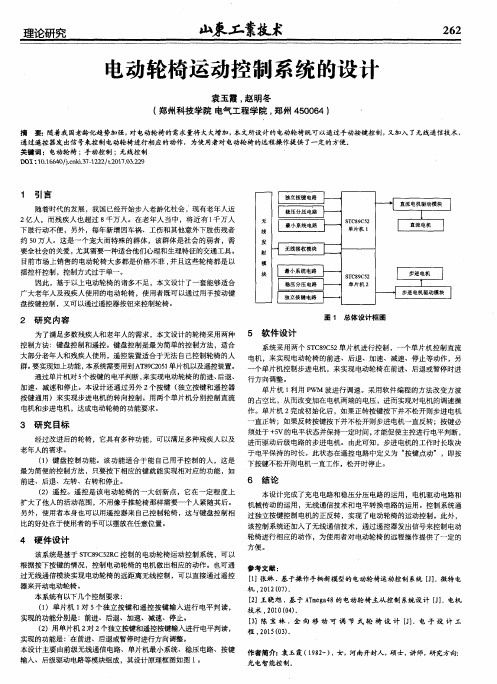
摘 要: 随着我 国老龄化趋 势加 强, 对 电动轮椅的需求量将大大增加, 本文所设计 的电动轮椅既可 以通过手动按键控制 , 又加入 了无线通信技术 通过遥控 器发 出信号来控制 电动轮椅 进行相应 的动作 ,为使 用者对 电动轮椅 的远程操作提供 了一定的方便。 关键词 :电动轮椅 ; 手动控制 : 无线控 制
参考文献 :
[ 1 】 张琳 . 基于操 作手柄新模 型的电动轮椅运 动控制 系统 [ J ] . 微特 电
机, 2 0 1 2 ( 0 7 ) .
本 系统有 以下几个控制要求 :
[ 2 】 王 晓旭 . 基于 A T m e g a 4 8 的 电动轮 椅主从控 制系统设计 [ J ] .电机
图 1 总体 设 计 框 图
系统采 用两个 S T C 8 9 C 5 2 单片机进行控 制 ,一个单片机控 制直流
电机 ,来实现 电动轮椅 的前进、后退、加速、减速、停止等动作 ,另
一
群。 要实现如上功能, 本 系统需要用到A T 8 9 C 2 0 5 1 单片机 以及遥控装置。
履带-轮式爬楼梯电动轮椅设计【带图纸】
履带-轮式爬楼梯电动轮椅设计【带图纸】毕业设计说明书论文 QQ 36296518 原创通过答辩履带,轮式爬楼梯电动轮椅设计摘要随着社会的发展和人类文明程度的进步,老年人与残障人员愈来愈需要运用现代高新技术来改善他们的生活质量,而爬楼梯对于老年人和残疾人行动不方便的,非常困难,所以要增加轮椅自动化程度,于是我们在原轮椅的基础上进行改进和加装爬楼机构,本文设计的电动轮椅具有爬楼功能,爬楼时用履带驱动,平地时可像普通轮椅用轮驱动也可轮椅稍后仰用履带驱动。
此车在轮椅的基础上安装履带装置、升降机构、电机、以及控制电路、控制设备,以降低劳动强度、提高效率,减少他们的困难、提高生活质量、满足市场需求为目的。
爬楼梯车具有适应性强、机动灵活、活动范围大等特点,在我国国民经济的发展中,爬楼梯电动轮椅的需求量逐年增加,市场发展潜力巨大,爬楼梯电动轮椅行业具有广阔的发展机遇和良好的投产前景。
关键词:爬楼梯,电动,轮椅,履带轮式 I 履带,轮式爬楼梯电动轮椅设计Abstract With the social development and improvement in the level of human civilization,oldmen and physically disabled members of society more and more need to usemodern high-tech to improve their quality of life,but the elderlyand handicapped areunable to climb the stairs, so we had to increase the automaticlevel of the electricwheelchair to reduce their difficulty. So we have the original onthe basis o f awheelchair to improve and the installatio n of Climbing stairs institutions, the paperdesign with the electric wheelchair has Climbing stairs function, when Climbing stairsit use track-driven, the ground can be used like an ordinary wheelchair-wheel-drivecan also be track-driven, when the chair be tilted.we have fit inthe new equipmentsinclude the tracked device,the body movements, the electromotor, control circuit andcontrol equipment, etc, to reduce the labor intensity and difficulty, and to improve theefficiency and living quantity, so that can satisfy the requirements of the market. Theautomatic electric wheelchair has new characteristics of high adaptability, mobilityand orbit, etc. As the development of the national economy, the requirement ofautomatic electric wheelchair will be increased year by year. So the developingpotential of the automatic electric wheelchair in the market is vast, it has a gooddeveloping opportunity and well invested prospect. Keywords:Climbing thestairs,electricity, wheelchair, Track-Wheel 履带,轮式爬楼梯电动轮椅设计目录第一章综述.................................................................. .. (1)1.1 爬楼梯轮椅的意义 (1)1.2 国内外爬楼梯轮椅的发展状况 ....................................21.2.1 国外爬楼梯轮椅的发展状况 (2)1.2.2 国内爬楼梯轮椅的发展状况 (4)1.3 本项目的设计目的与主要研究内容 ................................51.3.1 课程设计目的 (5)1.3.2 课题研究内容 (6)1.4 设计进程安排 ..................................................6第二章履带爬楼装置机械系统结构设计 (8)2.1 爬楼机构的比较 ................................................82.2 设计思路 ......................................................9......................................... 10 2.3 履带轮式轮椅爬楼原理2.4 履带爬楼过程分析 .............................................112.5 爬楼性能参数 .................................................132.6 履带爬楼机构的结构设计 .......................................132.7 升降机构的设计 (16)2.8 本章小结 (18)第三章电气系统设计 ................................................................. ............ (19)3.1 履带爬楼梯装置执行电机选择 (19)3.2 电池选择 (20)3.3 电动车电机转速控制 (21)3.3.1 驱动方式对电动车性能影响 (21)3.3.2 现有电动车电机存在主要问题及探索 ...........................213.4 直流电机机械特性 (22)3.5 控制系统的设计 (23)3.6 本章小结 (28)第四章典型零部件设计及校核计算 (29)4.1 传动系统动力参数计算 (29)4.2 轴的计算 (30)III 履带,轮式爬楼梯电动轮椅设计第五章技术经济分析报告 ................................................................. . (39)5.1 履带轮式轮椅技术分析 (39)5.2 履带轮式轮椅经济分析 (39)5.3 履带轮式轮椅结论和展望 (40)参考文献 ................................................................. (41)致谢 ................................................................. ............................................ 42 IV 履带,轮式爬楼梯电动轮椅设计第一章综述 1.1 爬楼梯轮椅的意义轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,随着无障碍设施的增多,轮椅使用者的活动范围逐步加大,但楼梯却使轮椅受到很大限制,因此研发价格低廉、简单易用的爬楼梯轮椅是康复工程工作者面临的一项比较紧迫的任务。
电动轮椅系统设计

■ 工业及科学用仪表
Industrial Instruments
型号选用说明 Model explanation M1 电位器 Potentiometers B B型防尘圈 B Sealed form 300 R系列摇杆 R series joystick R 代表三维 3D
摇杆尺寸
高速计数器
达到调节重心的目的。
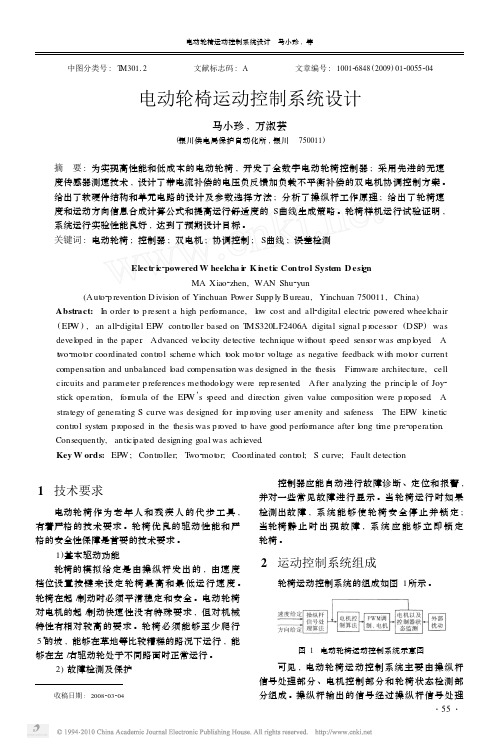
轮椅控制系统
速度给定 方向给定
操纵杆 信
号处理算 法
电机控制 算法
电机
电动轮椅运动控制系统示意图源自电机以及 控制器状 态监测
外部扰动
光电编码器
• 类型 光电编码器
• 品牌 HONEST SENSOR
• 型号 编码器码盘 客制化生产
• 外型尺寸 客制化生产(mm)
• 适用范围 旋转编码器, 光栅尺, • 伺服电机, 机器手臂, 打印机
■ 引线长度Lead length
Measurement equipments
■ 防尘盖 Seal form
■ 自动化机器控制
■ 开关 Switch
Automative control
■ 电位器型号规格 potentiometer
■ 视频编辑及生产设备
■ 操纵手感轻或重 soft or heavy handling Video editing equipments
能低成本的电动轮椅驱动器,替代进口填补国内技术空白
具有重要意义。
电动轮椅类型及技术简介
电动轮椅类型 驱动类型
四轮驱动
简介
能在各种不利地形的路面上行驶, 甚至是在沙地上或者雪地里。
制动类型
稳定性控制类 型
被动 被动
通过弹簧或压力避震器来减小轮椅
电动轮椅智能导航与控制系统设计与实现
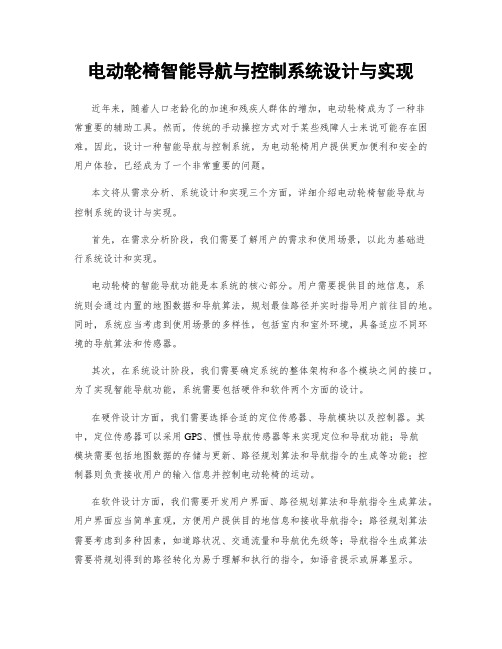
电动轮椅智能导航与控制系统设计与实现近年来,随着人口老龄化的加速和残疾人群体的增加,电动轮椅成为了一种非常重要的辅助工具。
然而,传统的手动操控方式对于某些残障人士来说可能存在困难。
因此,设计一种智能导航与控制系统,为电动轮椅用户提供更加便利和安全的用户体验,已经成为了一个非常重要的问题。
本文将从需求分析、系统设计和实现三个方面,详细介绍电动轮椅智能导航与控制系统的设计与实现。
首先,在需求分析阶段,我们需要了解用户的需求和使用场景,以此为基础进行系统设计和实现。
电动轮椅的智能导航功能是本系统的核心部分。
用户需要提供目的地信息,系统则会通过内置的地图数据和导航算法,规划最佳路径并实时指导用户前往目的地。
同时,系统应当考虑到使用场景的多样性,包括室内和室外环境,具备适应不同环境的导航算法和传感器。
其次,在系统设计阶段,我们需要确定系统的整体架构和各个模块之间的接口。
为了实现智能导航功能,系统需要包括硬件和软件两个方面的设计。
在硬件设计方面,我们需要选择合适的定位传感器、导航模块以及控制器。
其中,定位传感器可以采用GPS、惯性导航传感器等来实现定位和导航功能;导航模块需要包括地图数据的存储与更新、路径规划算法和导航指令的生成等功能;控制器则负责接收用户的输入信息并控制电动轮椅的运动。
在软件设计方面,我们需要开发用户界面、路径规划算法和导航指令生成算法。
用户界面应当简单直观,方便用户提供目的地信息和接收导航指令;路径规划算法需要考虑到多种因素,如道路状况、交通流量和导航优先级等;导航指令生成算法需要将规划得到的路径转化为易于理解和执行的指令,如语音提示或屏幕显示。
最后,在系统实现阶段,我们需要将系统设计的各个模块进行具体的实现和集成。
在实现过程中,要注意观察和测试系统的性能,及时发现和解决问题,保证系统的稳定与可靠性。
在技术实现方面,可以利用现有的智能手机和互联网技术,通过连接智能手机和电动轮椅来实现导航和控制功能。
一种全新的多功能智能电动轮椅系统设计
一种全新的多功能智能电动轮椅系统设计刘薇摘要:给出了一种具有基本行走移动、健康监护、多媒体、休闲娱乐、安全避障、导航定位等多功能的全新的智能电动轮椅设计方法,可极大拓展老、伤残人士社会交流的深度和广度,对我国智慧型养老社会的实现具有重要意义。
关键词:智能;电动轮椅;智慧养老;多功能;系统设计: TP249 : A :1009-3044(2017)36-0155-02Abstract: Proposed a new design method of intelligent electric wheelchair with multifunction of basic walking movement, health monitoring, multimedia, entertainment, safe obstacle avoidance,navigation and positioning, etc. it can greatly expand the depth and scope of social communication of the old and disabled people, and ithas important significance for the realization of intelligent endowment society in our country.Key words:Intelligence; Electric wheelchairs; A wise old age;Multifunction system design智能轮椅是将智能机器人技术应用于电动轮椅,融合多种领域技术,包括机器视觉、机器人导航和定位、模式识别、多传感器融合及用户接口等,涉及机械、控制、传感器、人工智能等技术,具有自主导航、避障、人机对话以及提供特种服务等多种功能的一种服务型机器人。
基于ATxmega64单片机的电动轮椅控制系统设计

www�ele169�com | 3电子电路设计与方案0 引言电动轮椅是一种以蓄电池为能源、通过电子控制系统驱动直流电机运动,使用者可通过控制装置自行驱动电动轮椅运动,适用于下肢功能障碍的伤残人事使用,是一种比较理想的代步工具。
图1 电动轮椅控制系统硬件框图■1.1 电源模块电源模块采用LM2596稳压电路,由24V 铅酸蓄电池提供输入电源,电源有S1开关控制,24V 电源通过LM2596-12.0稳压电路,稳压输出12V 电源,再通过LM2596-3.3V 稳压电路输出3.3V 电源,为ATxmega64A3单片机提供工作电源,该稳压电路可输出最大电流为3A,输入最高电压为40V。
由D1发光二极管显示3.3V 电源状态。
电源模块电路图,如图2所示。
显示模块用于显示电动轮椅的工作状态,包含电池电量状态、轮椅行进的速度选择高速或低速状态、轮椅行进的方向信息前进或倒退状态等。
同时各参数设置的信息,用于人机交互显示,包含屏幕亮度和对比度设置信息、电量低报警值设置等。
■1.3 电量检测模块铅酸蓄电池的开路电压和荷电量是有对应关系是线性,因此可通过检测蓄电池开路电压来检测蓄电池电量,电量检测采用ATxmega64A3单片机自带AD 转换器,检测蓄电池的电压,由于蓄电池的电压为24V,而AD 转换器输入最大电压为3.3V,采用R11和R12高精度电阻,对蓄电池电压进行分压,再通过AD 转换器检测蓄电池电压,为保证AD 转换器的转换精度,卢茹(广东省机械技师学院,广东广州,510450)摘要:轮椅是康复的重要工具,轮椅它不仅是肢体伤残者和行动不便人士的代步工具,更重要的是使他们借助于轮椅进行身体锻炼和参与社会活动。
电动轮椅是在传统手动轮椅的基础上,叠加高性能动力驱动装置、智能操纵装置、电池等部件,改造升级而成的。
具备人工操纵智能控制器,就能驱动轮椅完成前进、后退、转向等功能的新一代智能化轮椅。
电动轮椅已成为行动不便的老年人、残疾人不可缺少的代步工具。
多传感器智能轮椅的硬件系统设计
多传感器智能轮椅的硬件系统设计智能轮椅的任务是平安、便捷地把用户送到目的地,完成既定任务。
在运动过程中,轮椅既需要接受用户的命令,又需结合环境信息启动自身避障、导航等功能模块,与移动不同的是,在用法过程中,轮椅与用户成为一个协同工作的系统。
这就要求在设计之初就把人这个因素纳入考虑之中,所以,平安、舒服和简单操作应成为智能轮椅设计中最重要的因素;用法者身体能力的差异打算了智能轮椅需被设计为一个功能多元化,能满足多种层次需要的系统,而模块化最能体现系统多功能化的特征,每个用户都能按照其自身残障类型和程度挑选适当的模块集成,且设计者可以在现有基础上通过增添功能模块,很便利地对轮椅功能举行改进。
本文着重就智能轮椅模块化设计举行了阐述。
1 系统总体结构设计智能轮椅的总功能可以分为以下几个子功能:环境感知及导航功能、控制功能、驱动功能和人机交互功能。
通过对智能轮椅的功能分析和模块划分,再结合详细的讨论内容和期望控制目标,本系统主要由传感器模块、驱动控制模块和人机交互模块3部分组成,硬件系统结构1所示。
其中传感器模块主要有内部状态感知和外部环境感知两部分构成,通过姿势传感器确定轮椅自身的位姿信息;通过的位移速度和距离获得自定位信息;视觉、超声波和临近开关主要负责持续获得周围环境和障碍物的距离信息。
驱动控制模块我们采纳后轮驱动的方式,每一个后轮配置一个,在控制器的操作下实现电动轮椅的前进、后退和转向。
人机交互界面由操作杆和个人电脑界面数据输入两种方式,实现基本的人机交互功能。
其中,数据采集单元拟挑选 TMS320LF2407A作为传感器模块的控制芯片。
TMS320LF2407A是一款高性能的数字信号处理器,它具有较高的频率,丰盛的外围接口。
它的主频可达150MHz、低功耗(核1.8V,I /O电压3.3V);128kXl6位片上FLASH,18kXl6位片上SRAM,4kXl6第1页共5页。
站立式电动轮椅机构设计及运动学仿真
站立式电动轮椅机构设计及运动学仿真摘要:很多身体有残疾的人下肢活动不便,日常生活中需要利用轮椅进行基本生活。
但是传统轮椅存在很大弊端,残障人士长期坐轮椅会造成下肢肌肉松弛,并对下肢静脉造成很大影响。
一些长时间久坐的残障人士由于下肢血液供应不畅,导致下肢肿大,同时对脊柱造成影响。
为了解决这一问题,需要对轮椅进行改良,使用站立式电动轮椅代替传统轮椅就是一个很好的方案。
文章围绕站立式电动轮椅设计问题,以及运动学仿真问题进行简要分析。
关键词:电动轮椅;运动仿真;结构设计引言站立式电动轮椅的出现,有效解决了下肢行动不便人员由于久坐而产生的各种问题。
如何对站立式电动轮椅进行优化,已经成为电动轮椅行业的一个发展热点。
就目前轮椅制造行业发展情况来看,大部分电动轮椅的科技含量较低,仅仅是对传统手动轮椅进行简单的电气改造,在轮椅下方安装动力装置以及传动装置,以电瓶作为驱动力移动轮椅。
这种轮椅无论是在安全性还是功能性方面均存在一定问题,因此相关研究人员需要对电动轮椅进行智能化升级,并通过运动仿真研究提高站立式电动轮椅的舒适性以及安全性。
一、电动轮椅结构设计就目前该领域技术发展情况来看,一种普遍被接受的站立式电动轮椅设计思路是使用四边形连杆,将其与电机进行组合,让轮椅能够实现各种姿势灵活转变。
人们在使用轮椅的时候可以通过手边的控制设备输出指令,电机开始工作并改变四边形连杆形态,进而完成躺姿、坐姿、站姿之间的灵活转变。
实际设计过程中,设计人员尝试使用两台电机对四边形连杆进行控制,通过这种方式让每一台电机都能独立完成姿势转变工作[1]。
此外,利用两台电机配合运作,减少单个电机调整轮椅姿势时的卡顿感,提升站立式电动轮椅的操控性。
电动轮椅主要由8个活动零件以及10个低副组成,自由度F=2,启动一台电机,就能够让电动轮椅形成一个稳态结构。
通过对该结构的分析可以发现,A点、B点、C点位固定点,D点为小轮,其目的是避免轮椅移动时由于过度前倾而摔倒。
电动轮椅智能导航控制系统设计
电动轮椅智能导航控制系统设计摘要本文针对电动轮椅使用者在移动过程中可能遇到的困难和障碍,提出了一种电动轮椅智能导航控制系统设计方案。
该方案基于深度学习技术和激光雷达传感器,通过实时感知周围环境并进行路径规划,实现自动导航功能。
该系统具有较高的精度和可靠性,并且能够提供更好的用户体验。
在实际应用中,该系统可以帮助电动轮椅使用者解决导航问题,提高其生活质量和独立性。
1. 引言随着社会的发展,电动轮椅成为行动不便或行动困难人群的重要辅助工具。
然而,传统的电动轮椅在导航方面存在一定的局限性,缺乏自主性和智能化。
为了提高电动轮椅使用者的生活质量和独立性,本文提出了一种电动轮椅智能导航控制系统的设计方案。
2. 系统架构电动轮椅智能导航控制系统由以下几个模块组成:感知模块、决策模块和执行模块。
感知模块主要负责实时感知周围环境,包括障碍物检测和位置定位。
决策模块根据感知模块的输入进行路径规划,选择最优路径并生成导航指令。
执行模块负责控制电动轮椅的运动,根据导航指令调整轮椅的速度和方向。
3. 感知模块感知模块是电动轮椅智能导航控制系统的关键部分。
该模块包括激光雷达传感器、视觉摄像头和距离传感器。
激光雷达可以提供精确的环境地图信息,用于障碍物检测和定位。
视觉摄像头可以捕捉周围的图像信息,用于识别人和物体。
距离传感器可以用于测量电动轮椅与障碍物之间的距离,避免碰撞。
4. 决策模块决策模块主要根据感知模块提供的信息进行路径规划和导航指令生成。
路径规划算法使用深度学习技术,通过训练神经网络模型来预测最优路径。
导航指令生成算法根据路径规划结果生成相应的指令,例如转向角度和速度控制。
5. 执行模块执行模块负责控制电动轮椅的运动。
该模块通过控制电动轮椅的电动机和转向器来实现轮椅的运动控制。
根据导航指令,执行模块调整电动轮椅的速度和方向,使其按照预定路径自动导航。
6. 系统性能评估为了评估电动轮椅智能导航控制系统的性能,我们进行了一系列的实验和测试。
多功能智能电动轮椅系统设计
中国科技信息 2019 年第 12 期·CHINA SCIENCE AND TECHNOLOGY INFORMATION Jun.2019 DOI:10.3969/j.issn.1001- 8972.2019.12.028
可实现度
可替代度
行业曲线
link
appraisement
5. 出行管理功能:该功能主要指的是定位和导航功能,如 果使用者需要导航的时候,就可以通过专用 App 进行导航。并 且,触屏上配备了专用的 GPS 定位器,家属可以通过 APP 查 看轮椅的实际位置,尽可能保障轮椅使用者的出行安全。
新型智能轮椅主要机构介绍
1. 在设计智能轮椅结构的时候,主要对以下几点加强了 重视:
3. 安全管理功能:在轮椅前后都安装了机械防撞杆,确 保使用轮椅的时候不会受到碰撞。而且,轮椅采取安全避障 的措施,还能够有效规避前方的障碍物。在设计电池的时候, 充分考虑到了过流保护、短路保护以及过充保护,使供电安 全大大提升。如果轮椅出现异常为的时候,就会第一时间发 出警报,从而采取针对性的措施进行处理,同时也会利用无 线信号把危险信号发送给轮椅使用者家人或附近社区医院。
indu:内蒙古工业大学科学研究项目(ZY201819)
影响力
真实度
行业关联度
李冬梅 多功能智能电动轮椅系统设计
随着科学技术的进步,对人们的生产生活带来了极大的便利,尤其 是对于医疗行业来说,具有非常重要的实践意义。在目前的医疗领域中, 移动机器人是非常重要的组成部分,而智能电动轮椅的应用对于学术行 业及社会来说都具有非常重要的意义。随着我国老龄化进程的加快以及 意外情况发生率的提升,每年发生的致残人数呈现递增的趋势,这对整 个社会的稳定发展有很大的影响。而智能电动轮椅属于目前一款运行可 靠、功能完善的重要工具,能够帮助残疾人士及老年人的生活质量得以 提高,具有重要的实践意义。并且,智能电动轮椅融入了材料科学、机 械科学、信息科学、计算机、人工智能等多门学科,综合了当下非常先 进的技术,深层次多角度的研究多功能智能轮椅,不但可以使学科的纵 向深度得到加深,而且还能够融合多学科,具有重要的学术意义。
电动轮椅运动控制系统设计
中图分类号:T M30112 文献标志码:A 文章编号:100126848(2009)0120055204电动轮椅运动控制系统设计马小珍,万淑芸(银川供电局保护自动化所,银川 750011)摘 要:为实现高性能和低成本的电动轮椅,开发了全数字电动轮椅控制器;采用先进的无速度传感器测速技术,设计了带电流补偿的电压负反馈加负载不平衡补偿的双电机协调控制方案。
给出了软硬件结构和单元电路的设计及参数选择方法;分析了操纵杆工作原理;给出了轮椅速度和运动方向信息合成计算公式和提高运行舒适度的S 曲线生成策略。
轮椅样机运行试验证明,系统运行实验性能良好,达到了预期设计目标。
关键词:电动轮椅;控制器;双电机;协调控制;S 曲线;误差检测Electr i c 2powered W heelcha i r K i n eti c Con trol Syste m D esi gnMA Xiao 2zhen,WAN Shu 2yun(Aut o 2p reventi on D ivisi on of Yinchuan Power Supp ly Bureau,Yinchuan 750011,China )Abstract:I n order t o p resent a high perfor mance,l ow cost and all 2digital electric powered wheelchair (EP W ),an all 2digital EP W contr oller based on T MS320LF2406A digital signal p r ocess or (DSP )was devel oped in the paper .Advanced vel ocity detective technique without s peed sens or was e mp l oyed .A t w o 2mot or coordinated contr ol sche me which t ook mot or voltage as negative feedback with mot or current compensati on and unbalanced l oad co mpensati on was designed in the thesis .Fir mware architecture,cellcircuits and para meter p references methodol ogy were rep resented .After analyzing the p rinci p le of Joy 2stick operati on,f or mula of the EP W πs s peed and directi on given value compositi on were p r oposed .A strategy of generating S curve was designed f or i m p r oving user a menity and safeness .The EP W kineticcontr ol syste m p r oposed in the thesis was p r oved t o have good perfor mance after l ong ti m e p re 2operati on .Consequently,antici pated designing goal was achieved .Key W ords:EP W ;Contr oller;T wo 2mot or;Coordinated contr ol;S curve;Fault detecti on收稿日期:20082032041 技术要求电动轮椅作为老年人和残疾人的代步工具,有着严格的技术要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
■ 操纵灵活Flexible handling
■ 复位误差小Small resetting error
•
■ 寿命长 Long life-time 可选项 Optionals ■ 端子型号Terminal type
■ 引线长度Lead length
■ 防尘盖 Seal form
■ 开关 Switch
■ 电位器型号规格 potentiometer ■ 操纵手感轻或重 soft or heavy handling
PID参数整定
• 1) 比例系数Kp对系统性能的影响: 比例系数加大,使系统的动作灵敏,速度加快,稳态误差减小。 Kp偏大,振荡次数加多,调节时间加长。Kp太大时,系统会趋于不 稳定。Kp太小,又会使系统的动作缓慢。Kp可以选负数,这主要是 由执行机构、传感器以控制对象的特性决定的。如果Kc的符号选择 不当对象状态(pv值)就会离控制目标的状态(sv值)越来越远,如果出 现这样的情况Kp的符号就一定要取反。 • (2) 积分控制Ti对系统性能的影响: 积分作用使系统的稳定性下降,Ti小(积分作用强)会使系统 不稳定,但能消除稳态误差,提高系统的控制精度。 • (3) 微分控制Td对系统性能的影响: 微分作用可以改善动态特性,Td偏大时,超调量较大,调节时 间较短。Td偏小时,超调量也较大,调节时间也较长。只有Td合 适,才能使超调量较小,减短调节时间。
电动轮椅系统设计
电气1231 第一小组
电动轮椅组成
• • • • • 电源 电机 光电编码器 摇杆 外壳等等
前提
• 电动轮椅是一种以蓄电池为能源、电机驱动的轮椅车。 具有省力、操作简便、车速平稳、无污染和低噪音的特点。 适于下肢残疾、高位截瘫或偏瘫以及年老体弱者使用,是 一种比较理想的移动或代步工具。 • 目前,国外对电动轮椅的研究已相对比较成熟。他们 已开发出各种各样的适合不同用户群体的电动轮椅,并逐 渐向智能化的方向发展。现在高性能电动轮椅生产厂家多 集中在美国、德国、澳大利亚和西班牙,中国台湾也有电 动轮椅生产厂家。然而,国内对电动轮椅的研究技术依然 远远落后于国外,绝大多数轮椅厂家都只生产电机和座椅 而不生产控制器,基本上都依赖于进口。因此,研究高性 能低成本的电动轮椅驱动器,替代进口填补国内技术空白 具有重要意义。
非接触式
增量式 35元
电源
• • • • • • • • • • • 锂电池 加工定制 品牌 型号 WATE WATE-2440 40000(mah) 24(V) 10(A) 120*185*265(mm) 电动自行车 ce 1800元
是
额定容量 标准电压 充电电流 外型尺寸 适用类型 产品认证 价格
摇杆尺寸
高速计数器
三菱plc输入模块
麦克纳姆轮
(一)前向运动
(二)后向运动
(三)右向运动 运动学关系示意图
(四)左向运动
手柄
原理图
三菱plc
输入 1 2 3 4 模块 高速计 数器
电机 驱动
电机 驱动
电机 驱动
电机 驱动
码盘
电机
电机
电机
电机
给定 信号
PID 计算
MOS管
电机
码盘
P:比例 I:积分 D:微分
摇杆
特点 Features
典型应用 Typical Applications
■ 移动摄像和CCTV控制系统 Move photography CCTV control system ■ 测试计量设备 Medical imaging system ■ 医药成像系统 Measurement equipments ■ 自动化机器控制 Automative control ■ 视频编辑及生产设备
电动轮椅类型及技术简介
电动轮椅类型
驱动类型
四轮驱动
简介
能在各种不利地形的路面上行驶, 甚至是在沙地上或者雪地里。
制动类型
稳定性控制类 型
被动
被动
通过弹簧或压力避震器来减小轮椅
的振动 上下坡的时候,用户可以自己移 动身体或电动地调节座椅的位置来 达到调节重心的目的。
轮椅控制系统
ቤተ መጻሕፍቲ ባይዱ
速度给定 方向给定
操纵杆 信 号处理算 法
电机
• • • • 加工定制 品牌 羚鹰 有刷直流电动机 是 产品类型 型号 MY68
•
• •
额定功率
额定电压 额定转速
0.1(kW)
24(V) 2700(rpm)
•
• •
主要适用范围
产品认证 价格 38元
电动滑板车、小冲浪
CE
基材 材料 聚碳酸酯(PC) 厚度 0.18mm, 0.25mm, 0.5mm, 1.0mm, 1.5mm, 2.0mm±10% 透光度 ≥90% 操作温度 -40 ~ 120℃ 误差 内径 ± 0.05mm 外径 ± 0.1mm 不透光/透光比例 ≤0.005 mm 码道同心度 ≤0.1 mm 码道真圆度 ≤0.05 mm 冲压毛刺 ≤0.2 mm
电机控制 算法
电机
电机以及 控制器状 态监测
外部扰动 电动轮椅运动控制系统示意图
光电编码器
• • • 类型 光电编码器 品牌 HONEST SENSOR 型号 编码器码盘 客制化生产
•
• •
外型尺寸
客制化生产(mm)
适用范围 旋转编码器, 光栅尺, 伺服电机, 机器手臂, 打印机
•
• •
读出方式
工作原理 价格
Video editing equipments
■ 工业及科学用仪表 Industrial Instruments
型号选用说明
Model explanation M1 电位器 Potentiometers B B型防尘圈 B Sealed form 300 R系列摇杆 R series joystick R 代表三维 3D
PID公式
pid算法流程图
PID计算
当|e(t)|≤β时 当|e(t)|>β时 q0 = Kp(1+Td/T) q1 = -Kp(1+2Td/T) q2 = Kp Td /T u(t) = u(t-1) + Δu(t) PID增量式算法离散化 公式: u(t);;;;; 控制器的输 出值。 e(t);;;;; 控制器输入 与设定值 之间的误差。 Kp;;;;;;; 比例系数。 Ti;;;;;;; 积分时间常 数。 Td;;;;;;; 微分时间常 数。 T;;;;;;;; 调节周期。 β ;;;;;;; 积分分离阈 值