【Robot中英对照说明书】What's New in Autodesk Robot Structural Analysis Professional 2021
介绍机器人说明书英文作文
介绍机器人说明书英文作文下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copyexcerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!Are you tired of doing all the household chores by yourself? Introducing the latest innovation in home technology the robot assistant! This handy machine is designed to help you with all your daily tasks, from cleaning and cooking to running errands. With its advanced technology and sleek design, the robot assistant is the perfect addition to any modern home.The robot assistant comes equipped with a variety of features to make your life easier. It has built-in sensors to navigate through your home and avoid obstacles, making it safe to use in any environment. It also has a powerful suction system for efficient cleaning, and a high-capacity battery for long-lasting performance. With its user-friendly interface, you can easily program the robot assistant to perform specific tasks at specific times, giving you more time to relax and enjoy life.Not only is the robot assistant practical, but it'salso fun to use! You can customize its appearance and voice to suit your preferences, and even give it a name. It'slike having a new member of the family, except this one doesn't need to eat or sleep! Whether you need help with cooking a meal, doing the laundry, or simply entertaining your guests, the robot assistant is always ready to lend a hand.In addition to its domestic capabilities, the robot assistant can also be used for commercial purposes. It's perfect for businesses looking to streamline their operations and improve efficiency. With its ability to perform repetitive tasks with precision and consistency, the robot assistant is a valuable asset for any workplace. From managing inventory to assisting customers, this versatile machine is the ultimate business partner.In conclusion, the robot assistant is a game-changer in the world of home and business automation. Its advanced technology, practical features, and user-friendly interface make it a must-have for anyone looking to simplify their daily routine. Say goodbye to mundane chores and hello to amore convenient and enjoyable life with the robot assistant by your side.。
Autodesk AEC产品介绍与特点说明书

Dynam(o)ite Your Structural DesignDieter Vermeulen M.Sc. Str. Eng.Technical Sales Specialist AEC –Computational Design & EngineeringJoin the conversation #AULondonJoin the conversation #AU2017About me▪Technical Sales Specialist AEC @ Autodesk▪Computational Design & Engineering▪Structural Engineer based in Belgium▪+15 years experience in structural engineering@BIM4Struc/in/dietervermeulen /user/RevitbeyondBIM /bimtoolbox/Say hi to the 2 lab assistants !Johan Cantryn▪Tech. Specialist AEC for Datech in Benelux▪Architecture, Computational Design & collaboration▪Don’t dare to tell years in Autodesk ecosystem▪BIMNature blogRitesh Chandawar▪Product Owner (Dynamo) @ Autodesk▪Computational Design and Engineering▪10+ Years of Experience in AEC Industry▪Based in SingaporeClass SummaryDuring this hands-on lab you will:▪discover a whole new way of modelling and analyzing structures▪learn how to create complex structural steel models with Autodesk Dynamo and Autodesk Revit▪discover how to rewire your analysis system using Autodesk Dynamo and Autodesk Robot Structural Analysis Professional▪finally get surprised how easily you can handle almost any complex rebar design in Autodesk Revit with Autodesk DynamoHow to describe generative design?one humanonecomputerlimiteddesign +=Designer/engineer uses computer as passive machineTHE OLD WAYComputer and designer/engineerunite as cocreators THE NEW WAYone humanartifical –intelligencealgorithms100s to 1000s ofdesign options +unlimitedcloud-computingpower+=•Save time•Boost creativity •Save money•Create novel geometryWhat is computational design?a = 2b = 1 a –b = cf(x)a = 2b = 1 a –b = cConventional ScriptingScripting in Visual ProgrammingSketchingVisual ProgrammingComputational design with DynamoValue Proposition with Dynamo ▪Quickly explore parametric design concepts ▪Solve complex geometric problems▪Evaluate designs and analyze geometry▪Automate repetitive tasksDynamo as a design amplifier+=Design Dynamo PowerVisual Programming in Dynamo ▪Individual tasks areembedded in “nodes”▪Each node on the canvas hasits inputs and outputs▪Connect the in-and outputslogically with “wires”▪The effect displays on thegraphical backgroundDynamo Platform▪Open Source▪Available in Revit ▪Freely available ▪Standalone version▪Works outside of Revit ▪Yearly SubscriptionPackages+ 500000 downloads!Packages needed for this lab ▪Structural Analysis for Dynamo▪BIM4Struc.Rebar 1.2.5▪BIM4Struc.Productivity 1.2.6▪Dynamo 4 RebarPractical use casesComputational Designmeets Structural Steel DesignDesign of complex frame structures1.Select the mass roof surface2.Get the isolines and their translated lines3.Place equally divided points on the arcse the new points to create diagonals5.Coloured representation of the frame6.Generate frame in Revit in ordered wayComputational Designmeets Structural Analysis1.Import external geometries defined in a DWG drawing2a. Generate points at the reference lines as base for the arcs, and connect the with lines2b. Create a point for the arc creation, based on the middle of the line2c. Create the arc based on the three reference points2d. Discretize the arcs in polylines and create diagonals based on the arc division points3.Create the geometrical model in Robot Structural Analyis4.Define loads and boundary conditions for the model5.Analyze and review the resultsManual Optimization / Parametric RunStructural Optimization using Genetic Algorithms EVOLUTION Parent Solution 1“Dad”Evaluation Insert to the populationSelectionParental Solution 2“Mom”Child Solution “Baby truss”Cross Over MutationI t e r a t e G e n e r a t i o n sStructural Optimization w/ Genetic Algorithms PARETO OPTIMAL “Optimo” package ES9542: Dynam(o)ite Your Design for Engineers。
机器人应用手册说明书

for assembly 129-31 for handling 118-19 for machining 171-3 for spray painting 188-96 for welding 151, 163-6
see also behaviour charge-coupled devices 81-2 Cincinnati Milacron robots 2
7-8,20-1,112 automobile industry see leak
testing; spot welding; spray painting axes end-effector 30 extra 29, 119 multiple 6-7
behaviour characteristics long-term 43-6 stationary 46-7 see also aberrant behaviour
gripper 67 performance testing and 43,
44 see also direct drives; electric
drives; hydraulic drives; pneumatic drives duplication of joints 30 dynamic camera positioning 84-5 dynamic control 33-4 dynamic performance 49
fail-safe brakes 161 laying-up of composites 208-
9 machining 174,175 water jet cutting 206 clamping grippers 61-71 classification of robot systems
【Robot中英对照说明书】What's New新功能

【Robot中英对照说明书】What's New新功能【Robot中英对照说明书】What's New新功能The following sections highlight changes and new features in Autodesk Robot Structural Analysis Professional.以下部分将重点介绍Autodesk Robot Structural Analysis Professional中的更改和新功能。
Note: For most new features, a link takes you to the relevant section in the help if it exists. Although these links are correct for the current version of the software, links from prior versions may not be maintained due to changes in documentation and in the software.注意:对于大多数新功能,链接会将您带到帮助中的相关部分(如果存在)。
尽管这些链接对于软件的当前版本是正确的,但是由于文档和软件中的更改,以前版本的链接可能无法维护。
Topics in this section本节主题•What's New in Autodesk Robot Structural Analysis Professional 2019•What's New in Autodesk Robot Structural Analysis Professional 2018•What's New in Autodesk Robot Structural Analysis Professional 2017•What's New in Autodesk Robot Structural Analysis Professional 2016•What's New in Autodesk Robot Structural Analysis Professional 2015What's New in Autodesk Robot Structural Analysis Professional 2019Here is the list of improvements and other changes introduced in Autodesk Robot Structural Analysis Professional 2019.以下是Autodesk Robot Structural Analysis Professional 2019中引入的改进和其他更改的列表。
【Robot中英对照说明书】Definition of Objects对象的定义

【Robot中英对照说明书】Definition of Objects对象的定义The option defines various objects available in Robot. The objects are defined in a similar way.该选项定义Robot中可用的各种对象。
对象的定义方式类似。
Arc弧Circle圆Rectangle矩形Cylinder圆柱Cone圆锥Cube立方体Sphere球体Fillet (bars, edges)圆角(钢筋、边)Polyline - contour折线-轮廓Cladding包层Slab.厚板。
See also:另请参见:Point coordinates点坐标Topics in this section 本节主题Arc弧Circle圆Rectangle矩形Cylinder圆柱Cone圆锥Cube立方体Sphere球体Fillet (bars, edges) 圆角(钢筋、边)Parent topic: 其他父主题:ArcOpen the Arc dialog using either of the following methods:•Click Geometry menu > Objects > Arc.•Click .The dialog, which lets you define an arc, has the following parts:该对话框允许您定义圆弧,包含以下部分:•Object displays the number of the created or selected object•对象显示已创建或选定对象的编号•Definition Method•Geometry•Parameters.When the Arc dialog is fully opened, clicking Definition Method, Geometry, or Parameters minimizes the corresponding part of the dialog so it displays only the options used at a given time. When the window is minimized, clicking one of the button extends the dialog.当“圆弧”对话框完全打开时,单击“定义方法”、“几何图形”或“参数”可最小化对话框的相应部分,使其仅显示在给定时间使用的选项。
Autodesk 产品说明书

© 2018 Autodesk, Inc. All Rights Reserved. Except as otherwise permitted by Autodesk, Inc., this publication, or parts thereof, may not be reproduced in any form, by any method, for any purpose. Certain materials included in this publication are reprinted with the permission of the copyright holder.Disclaimer THIS PUBLICATION AND THE INFORMATION CONTAINED HEREIN IS MADE AVAILABLE BY AUTODESK, INC. “AS IS.” AUTODESK, INC. DISCLAIMS ALL WARRANTIES, EITHER EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE REGARDING THESE MATERIALS.Trademarks The following are registered trademarks of Autodesk, Inc., in the USAand/or other countries: Autodesk Robot Structural Analysis, Autodesk Concrete Building Structures, Spreadsheet Calculator, ATC, AutoCAD, Autodesk, Autodesk Inventor, Autodesk (logo), Buzzsaw, Design Web Format, DWF, ViewCube, SteeringWheels, and Autodesk Revit. All other brand names, product names or trademarks belong to their respective holders.Third Party Software Program Credits ACIS Copyright© 1989-2001 Spatial Corp. Portions Copyright© 2002 Autodesk, Inc. Copyright© 1997 Microsoft Corporation. All rights reserved. International CorrectSpell™ Spelling Correction Sys tem© 1995 by Lernout & Hauspie Speech Products, N.V. All rights reserved. InstallShield™ 3.0. Copyright© 1997 InstallShield Software Corporation. All rights reserved. PANTONE® and other Pantone, Inc. trademarks are the property of Pantone, Inc.© Pantone, Inc., 2002. Portions Copyright© 1991-1996 Arthur D. Applegate. All rights reserved. Portions relating to JPEG © Copyright 1991-1998 Thomas G. Lane. All rights reserved. Portions of this software are based on the work of the Independent JPEG Group. Portions relating to TIFF © Copyright 1997-1998 Sam Leffler. © Copyright 1991-1997 Silicon Graphics, Inc. All rights reserved.How to create an Add-In extension .dll file and make it available from Robot pull down menu. (language C#)August 28, 20181. IntroductionRobot Structure Analysis is equipped with appropriate interfaces that allow you to extend the functionality in a fairly simple way by including external components called directly from its pull down menu.This document was created to help you quickly implement such an add-in extension by using Visual Studio C# project. T he points below are in fact step by step instruction you should utilize to implement your own add-in extension and have possibility to call it from Robot Structure Analysis pull down menu.2. Visual Studio C# template projectIf you want to create add-in extension use project template attached to Robot Structure Analysis SDK (its name is MyAddin) or modify your own project basing on this project using the information contained in this short manual.The sample project template attached to Robot Structure Analysis SDK is the complete add-in but in fact it is doing nothing except showing simple window. This is only example but by adding your own code into proper places you will be able to obtain what you intent.3. References to RobotOM (Robot Object Model) libraryIn your project set references to RobotOM library (Interop.RobotOM.dll in the case of C# project). In the template project attached to RSA SDK references to RobotOM library are setto…\MyAddin\bin\Debug\Interop.RobotOM.dll4. Project configurationThe following screen shots briefly summarize the necessary project settings. Make sure that your add-in assembly is COM visible.5. Implementation of IRobotAddIn interfaceBelow you can see the simplest implementation of the IRobotAddIn interface.The DoCommand method will be executed after clicking on the appropriate pull down menu item . Therefore, it must contain instructions responsible for the appropriate functionalities of your add-in extension. The commands can be distinguished using the cmd_id parameter.By means of the InstallCommands method individual commands are added to the Robot Structure Analysis pull down menu This is done using cmd_list parameter being RobotCmdList type.using System;using System.Collections.Generic;using System.Linq;using System.Text;using RobotOM;namespace MyAddin{// ----------[VisibleAttribute(true)]public class Class1 : IRobotAddIn{private IRobotApplication iapp = null;public bool Connect(RobotApplication robot_app, int add_in_id, bool first_time){iapp = robot_app;return true;}public bool Disconnect(){iapp = null;return true;}public void DoCommand(int cmd_id){//exemplary implementationSystem.Windows.Forms.MessageBox.Show("Command " + cmd_id.ToString() + " executed.");// or execute any of your command for e.g. new Form1().Show();}public double GetExpectedVersion(){return 10;}public int InstallCommands(RobotCmdList cmd_list){//exemplary implementationcmd_list.New(1, "My Command 1"); // Text in Robot menureturn cmd_list.Count;}}// ----------}6. Setting new GUID for IRobotAddIn implementation and COM visible attribute for all forms… COM visibility attribute must be set to FALSE for all forms in your add-in.7. Add your own functionality code and build projectImplement DoCommand method with instructions responsible for the appropriate functionalities of your add-in extension.Implement InstallCommands to add individual commands to the Robot Structure Analysis pull down menu.Build project.8. Preparing add-in .dll file to run with Robot Structure Analysis•Create .tlb fileGo to folder where your add-in .dll file is generated (…\MyAddin\bin\Debug in ourexample)Run command :c:\Windows\\Framework64\v4.0.30319\regasm.exe /tlb /codebaseMyAddin.dllorc:\Windows\\Framework64\v2.0.50727\RegAsm.exe /tlb/codebase MyAddin.dll•Add created .tlb library to add-in .dll file:From the File menu \Open\File -> open created add-in .dll file(…\MyAddin\bin\Debug\MyAddin.dll in our example) and add created .tlb library to .dllfile (right hand mouse click menu).Resource type should be named as TYPELIB.•Change TYPELIB numberChange number to e.g 1.0 using Properties (right hand mouse click menu)•Close Visual Studio and save changes to .dll file9. Registration of created add-in .dll file to enable its visibility in Robot Structure AnalysisRegister add-in .dll file after its locating in target folder on any computer you want it to use as described below:•Open Command Prompt window as Admin•Go to the folder where the add-in .dll file is located and register it by commands: c:\Windows\\Framework64\v4.0.30319\regasm.exe /tlb /codebaseMyAddin.dllorc:\Windows\\Framework64\v2.0.50727\RegAsm.exe /tlb /codebaseMyAddin.dll9. Making new option available in Robot Structure Analysis pull down menuStart RSA, select any structure type, then from Add-ins menu start Add-ins Manage and u sing “…” button show path to add-in .dll file, then press Add button.… a fter closing manager the new option should be available in robot menuas it is showed above.How to create an Add-In extension .dll file and make it available from Robot pull down menu. (language VB Net )1. Visual Studio VBNet template projectCreate a class library project:Inside Visual Studio, on the File menu, click New Project. In the Installed Templates tab in the left-hand window, click Visual Basic. In the middle window, click Class Library.Enter MyAddinVBNet in the Name box and enter D:\Add-in in Location box then click OK.Visual Studio will create a default code project for you and display the code in the code window.2. Add references:In the Solution Explorer window on the right-hand side of the Visual Studio window, right-click References and click Add Reference…Click the Browse tab and in the Add Reference dialog and browse to the Autodesk Robot Structural Analysis Professional product installation sub-folder. (The sub-folder path depends on where you have installed RSA 201x. The default path isC:\Program Files\Autodesk\Autodesk Robot Structural Analysis Professional201x\*).You will add reference file from this folder. Select robotom.tlb, and then click OK. Now the interface DLL file is referenced in your project. All the RSA APIs are exposed by these interface files and your project can use all of those available APIs from them.3. Project configurationThe following screen shots briefly summarize the necessary project settings.4. Implementation of IRobotAddIn interfaceBelow you can see the simplest implementation of the IRobotAddIn interface.The DoCommand method will be executed after clicking on the appropriate pull down menu item . Therefore, it must contain instructions responsible for the appropriate functionalities of your add-in extension. The commands can be distinguished using the cmd_id parameter.By means of the InstallCommands method individual commands are added to the Robot Structure Analysis pull down menu This is done using cmd_list parameter being RobotCmdList type.Imports RobotOM<ComClass(Class1.ClassId)>Public Class Class1Implements RobotOM.IRobotAddIn' This GUID provides the COM identity For this Class' and its COM interfaces. If you change it, existing' clients will no longer be able to access the class.Public Const ClassId As String = "xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx"Private robotApp As RobotOM.IRobotApplication' A creatable COM class must have a Public Sub New()' with no parameters, otherwise, the class will not be' registered in the COM registry and cannot be created' via CreateObject.Public Sub New()MyBase.New()End SubPublic Sub DoCommand(cmd_id As Integer) Implements IRobotAddIn.DoCommand Select Case cmd_idCase 1'Clicking on first command in menu user gets messageMsgBox("Message From AddinVBNet")Case 2'Clicking on second command in menu user gets dialogDim frm As New Form1()Dim value As Integervalue = robotApp.Project.Structure.Bars.GetAll().Countfrm.Init(value)frm.ShowDialog()End SelectEnd SubPublic Function Connect(robot_app As RobotApplication, add_in_id As Integer,first_time As Boolean) As Boolean Implements IRobotAddIn.ConnectrobotApp = robot_appReturn TrueEnd FunctionPublic Function Disconnect() As Boolean Implements IRobotAddIn.DisconnectrobotApp = NothingReturn TrueEnd FunctionPublic Function GetExpectedVersion() As Double ImplementsIRobotAddIn.GetExpectedVersionReturn 19.0End FunctionPublic Function InstallCommands(cmd_list As RobotCmdList) As Integer Implements IRobotAddIn.InstallCommandscmd_list.[New](1, "Command 1 from AddinVBNet")cmd_list.[New](2, "Command 2 from AddinVBNet")Return cmd_list.CountEnd FunctionEnd Class5. Setting new GUID for IRobotAddIn implementationReplace xxxx.. with new GUID .6. Preparing add-in .dll file to run with Robot Structure Analysis•Create .tlb fileGo to folder where your add-in .dll file is generated (…\MyAddinVBNet\bin\Debug inour example)Run command :c:\Windows\\Framework64\v4.0.30319\regasm.exe /tlb /codebase MyAddinVBNet.dllorc:\Windows\\Framework64\v2.0.50727\RegAsm.exe /tlb/codebase MyAddinVBNet.dll•Add created .tlb library to add-in .dll file:From the File menu \Open\File -> open created add-in .dll file(…\MyAddinVBNet\bin\Debug\MyAddinVBNet.dll in our example) and add created .tlb library to .dll file (right hand mouse click menu).Resource type should be named as TYPELIB.•Change TYPELIB numberChange number to e.g 1.0 using Properties (right hand mouse click menu)•Close Visual Studio and save changes to .dll file7. Registration of created add-in .dll file to enable its visibility in Robot Structure AnalysisRegister add-in .dll file after its locating in target folder on any computer you want it to use as described below:•Open Command Prompt window as Admin•Go to the folder where the add-in .dll file is located and register it by commands:c:\Windows\\Framework64\v4.0.30319\regasm.exe /tlb /codebaseMyAddinVBNet.dllorc:\Windows\\Framework64\v2.0.50727\RegAsm.exe /tlb /codebaseMyAddinVBNet.dll8. Making new option available in Robot Structure Analysis pull down menuStart RSA, select any structure type, then from Add-ins menu start Add-ins Manage and using “…” button show path to add-in .dll file, then press Add button.… a fter closing manager the new option should be available in robot menu as it is showed above.。
机器人基础知识说明书
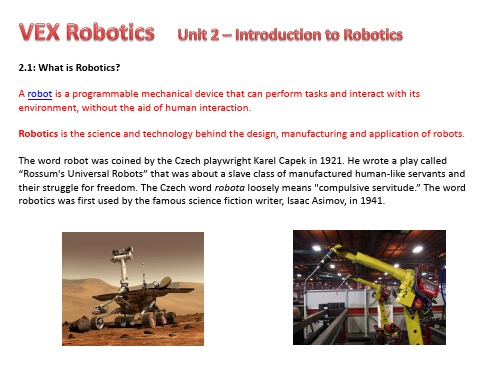
In industry, there are numerous jobs that require high degrees of speed and precision. For many years humans were responsible for all these jobs. With the advent of robotic technology, it became evident that many industrial processes could be sped up and performed with a higher degree of precision by the use of robots. Such jobs include packaging, assembly, painting, and palletizing. By the end of 2014, the International Federation of Robotics predicts that there will be over 1.3 million industrial robots in operation worldwide!
2.1: What is Robotics?
Uses and Examples of Robots
Space Shuttle Robotic Arm
When NASA scientists first began the design for the space shuttle, they realized that there would have to be some way to get the enormous, but fortunately weightless, cargo and equipment into space safely and efficiently. The remote manipulator system (RMS), or Canadarm, made its first flight into space on November 13, 1981. The arm has six joints, designed to simulate the joints of the human arm. Two are in the shoulder, one is at the elbow, and three are in the highly dextrous wrist. At the end of the wrist is an end effector which can grab or grapple the desired payload. In the weightless environment of space, it can lift more than 586,000 pounds and place it with incredible accuracy. Its total weight on earth is 994 lbs.
Autodesk CNC 机器人操作指南说明书
Traditional Milling Machine
Types of CNC Machining | 3
TABLE OF CONTENTS
01: INTRODUCTION Pages 1 - 4
02: COMPONENTS OF A CNC MACHINE Pages 5 - 7
CNC machine designs will vary greatly. On some styles, the part will move or rotate while the spindle and tool remains stationary, in others the part is stationary and the spindle and tool moves, and a third type is a mixture of either the part and spindle moving.
Programming with CAD/CAM system
On-machine programming
Types of CNC Machining | 8
TYPES OF CNC MACHINE
Types of CNC Machining | 9
TYPES OF CNC MACHINES
CNC machines will have movement that is either linear, or straight line, in motion or rotational. Typically the X, Y and Z axis are used for linear movements, whereas A, B or C will correspond to rotational axis, with A rotating about the X axis, B about the Y axis, and C about the Z axis.
Autodesk HSMWorks 2020.1 发布说明书

Autodesk® HSMWorks™ 2020.1Release NotesBuild 14.0.0.xxxxx / xx June 2019 Autodesk, Inc.CONTENTSThis document covers all three HSMWorks products:HSMXpressHSMWorks PremiumHSMWorks UltimateWhat’s NewSystem RequirementsInstallationWHAT’S NEWThe following changes have been made in the current update (2020.1):Milling ToolpathsImproved Adaptive for tighter model contours; it now finds a starting point on the stock boundary. (#12095)Improved start entries for Adaptive Clearing toolpaths so that the toolpath starts in corners/endpoints rather than in the middle of a stock line. (#12238)Fixed an issue where calculating a 2D Adaptive toolpath with rest machining from a face selection could result in a large area being machined. (#13030)Fixed an issue in Adaptive where using a ballnose cutter as a reference tool was giving the wrong toolpath. (#14000) Fixed an issue where preserve order was not respected in 2D Profile toolpaths. (#12127)Fixed an issue where 3D Adaptive Clearing with rest machining can fail with complex remaining stock. (#13622)Fixed several issues in which the toolpath computations for Adaptive Clearing could fail on Mac. (#12188)Fixed a problem in Contour toolpaths where ramps might not be connected to their cutting moves, resulting in an unexpected lift and plunge to cover the gap. (#13822)Fixed an issue that introduced unnecessary retracts in Ramp operations. (#13747)Fixed an issue which caused irregular cutting passes for Scallop toolpaths. (#13757)Fixed an issue where a Constant Scallop toolpath might not calculate when up/down milling and 'other-way' linking was enabled. (#13172)Removed the "Shoulder Length" and "Taper Angle" parameters from the Rest Machining dialog for 2D Adaptive. They are not applicable in this context. (#10594)Fixed a problem where retracting Z levels were machining areas that had already been cleared in lower levels. (#14035) Turning ToolpathsImplemented toolpath verification, simulation and NC code generation for general and boring turning tools when angled in the tool library or by using the tool orientation parameter in facing, profiling and chamfering operations (#14930)Fixed an issue where turn facing, profiling and chamfering operations with a right-facing angled tool with the angle specified either in the tool library setup or in the tool orientation section of the operation were simulating incorrectly as well as outputting incorrect NC code (#14785)Fixed an issue where a grooving operation could fail if the back and front Z limits coincided with the extents of the groove geometry. (#10978)Fixed a memory leak for some turning grooving jobs. (#13390)Tool LibraryFixed an issue where turning tools with boring holders were previewed incorrectly in the tool library and modeled incorrectly in simulation (#15116)Post ProcessorFunctionality has been restored to the alert, promptKey, and promptKey2 API calls. These now work as before, but are supported only on Windows. (#14452)Fixed a regression where tool.getExtent() could return an empty bounding box, causing the setup sheet to incorrectly scale the tool image. (#13848)Added a mechanism to define which rotary axes support TCP in the post processor. This simplifies the code needed to disable TCP for a single axis. (#13282)Added new global function 'isNewWorkPlane(section)' which returns true if the passed section requires new workplane calls. This simplifies the 'newWorkPlane' checks that are typically done inside of post processors (#13278)Added global variables 'minimumProgramNumber' and 'maximumProgramNumber' to post processor. (#13276)Post properties that you set when using a post processor are now saved to a file. This allows using the post processor on other computers with confidence that the previously used properties will continue to be applied. (#13233)Added the onManualNC function that will handle all Manual NC commands, and the expandManualNC function that handles all Manual NC commands using the historical method. (#12839)Fixed the behavior of mapToWCS, so that it can be changed multiple times in the post. (#12733)Added cancelRotation and cancelTranslation methods. (#8965)NC EditorUpdated HSMEdit to fix an issue in which the display of text was corrupted. (#14524)Updated HSMEdit to correct a problem with the backplotting function. (#14428)APIImprove the performance of API functions setObjectParameter and setObjectToolView by removing an unnecessary call to updateOperationManager. (#14467)LicensingFixed an issue in which administrator privileges were required when activating a license. (#14902)The following changes have been made in a previous update (2020):General ImprovementsFusion 360 subscribers may now run HSMWorks by authenticating with your Autodesk account. This requiresdownloading and installing HSMWorks from your Autodesk account. Look for this new version at the top level of'Products and Services', rather than the versions that are listed as part of the collection or part of 'Autodesk HSM'. (CAM-12164)The HSMEditor has been updated to the latest version for the 2020 release. (CAM-12417)A warning is now issued if you edit a machine configuration that is being used in multiple setups, since the changes youmake will affect all setups that reference the machine. (CAM-10281)Post Processor ImprovementsNew functions 'section.getModelOrigin' and 'section.getModelPlane' were added to provide access to the workcoordinate system of the CAD model. (CAM-12614)A 'reset' parameter has been added to the createAxis function, which can reset the current rotary axis position to zeroprior to scanning the section for the optimal rotary starting position. There are also corresponding 'axis.getReset' and 'axis.setReset' functions. (CAM-12300)A new variable 'machineParameter.spindleSpeedDwell' has been added which specifies a dwell time in seconds when thespindle speed changes during a drilling cycle. This can be used to correct expanded gun-drilling cycles. (CAM-9495)API ImprovementsA new HSMWorks_getObjectGeometry function provides access to the geometry set associated with an operation. (CAM-13613)A new HSMWorks_setObjectToolView function provides the ability to set the tool orientation for an object. (CAM-12988)A new HSMWorks_createObject function allows creation of Manual NC operations. (CAM-13678)Toolpath FixesWhen using a cutter with a corner radius in 2D Adaptive, the upper edge of a pocket could be gouged in somecircumstances; this is corrected. (CAM-11596)Allow machining two open bores within the same operation. (CAM-11647)Fixed an issue where the software could hang when calculating helical ramps on a contour pass. (CAM-12129)Fixed an issue in which toolpaths might not get created when using the "Fillet" option (Mac only). (CAM-12279)Fixed an issue in which helical links were detached from their cutting segment and a further lift and plunge was inserted in between to join them. (CAM-12364)Jet will now provide the user with a better warning when no path can be computed. (CAM-12953)Contour with Both Way and Roughing Passes used to produce partial toolpaths. This has now been fixed. (CAM-13309) Fixed an issue where some arcs were misformed when offset. (CAM-13135)Fixed an issue which could have caused gouges when smoothing for sampling strategies is enabled. (CAM-13266) Fixed an issue which caused irregular cutting passes for the scallop strategy. (CAM-13757)Turning FixesFixed leads when "Use fixed lead direction" was turned off for certain inside and face grooving operations. (CAM-10679)Post Processor FixesFixed an issue in which "getOptimizedTCPMode" was returning an incorrect value. (CAM-11367)A post processor error is no longer generated when a multi-axis operation has a constant tool axis of 0,0,1. (CAM-11794)The post processor now considers a drilling operation to be an axial center drilling operation instead of a millingoperation when it is within a tolerance of X=0, Y=0. (CAM-8185)Fixed a problem in which linear values from the machine configuration dialog were not recalculated according to the output units. (CAM-11877)Return to TopSYSTEM REQUIREMENTSAutodesk HSMWorks 2020 supports Microsoft Windows 7 64-bit and Windows 10 64-bit.。
Robot-使用手册
目录◆AUTODESK ROBOT结构分析软件快速浏览 (2)一、软件概述 (3)二、Robot 模块 (3)三、Robot 的页面布局 (6)四、软件的基本配置 (6)1.首选项 (7)2.工程首选项 (7)五、导航功能 (8)六、Robot工作界面的使用方法 (10)1.系统菜单 (11)2.布局菜单 (19)七、输入结构模型数据 (21)八、分析结构 (24)九、结果预览 (27)1.梁的示意图 (27)2.面的示意图 (29)3.彩图结果 (30)十、结构元素的设计 (32)1.钢结构和木结构的设计 (32)2.钢连接设计 (34)3.钢筋混凝土结构设计 (36)十一、报告及输出计算书 (39)十二、快捷键列表 (40)◆3D框架结构 (42)一、程序的配置 (43)二、模型的定义 (44)1.杆的定义(2D框架). (44)2.约束的定义 (45)3.2D椼架的定义 (46)4.荷载定义 (47)5.特殊荷载工况下荷载的定义 (48)6.复制已有框架 (51)7.横向梁的定义 (53)8.交叉支撑的定义 (54)三、结构分析 (57)四、结构预览 (58)1.以图形的形式预览梁的结构 (58)2.以表格的形式预览杆的结构 (59)3.应力分析 (61)4.打印前的准备 (63)RC和钢混合结构 (70)一、程序的配置 (71)二、模型定义 (72)1.结构轴网的定义 (72)2.截面的定义 (75)3.杆的定义 (77)4.约束的定义 (82)5.荷载工况的定义 (84)6.在预定义的荷载工况下施加荷载 (86)7.改变结构类型 (94)8.附加结构轴的定义 (95)9.复制已存在的框架 (96)10.横向梁的定义 (98)11.板的定义 (100)12.偏移的定义 (104)13.墙的定义 (109)14.墙约束的定义 (112)15.网格参数的定义 (114)16.板荷载的定义 (117)三、结构分析 (117)四、结构预览 (120)1.以彩图形式显示面板 (120)2.结构的变形 (122)3.以表格形式显示面板 (125)◆Robot Structural Analysis与Revit Structure 的结合 (129)一、将Revit模块导入到Robot中 (130)1.在Revit Structure打开工程 (130)2.向Robot发送数据 (131)3.Robot中的结构分析 (140)4.在Robot中结构的修正 (152)5.从Robot中升级Revit模型 (159)◆AUTODESK ROBOT结构分析软件快速浏览摘要:本手册的目的是为新手用户介绍Autodesk Robot结构分析系统,提供一些程序配置方面的指导,菜单系统和导航功能。
Autodesk Revit Structure 2011 用户手册说明书

Autodesk, Inc.111 McInnis ParkwaySan Rafael, CA 94903PHONE415-507-5000FAX415-507-5100Autodesk®Revit® Structure 2011Autodesk® Revit® Structure 2011 software offers Building Information Modeling (BIM) to structural engineering firms, delivering a better-coordinated and more reliable model for more efficient and accurate design and documentation. Help improve multidisciplinary coordination by using crucial information from architectural and engineering files, whether from Revit-based product models or from 2D file formats. Incorporate analysis through bidirectional linking to popular structural analysis software, including Autodesk®Robot™ Structural Analysis Professional software (2011 and previous releases of the software). Powerful parametric change management technology assists in coordinating modifications and updates across the model and documentation. Use a comprehensive set of drafting tools to help complete construction drawings in Revit Structure, and share design data with project teams for more efficient collaboration.What’s NewKey Features Common to All Revit Platform Software − Autodesk® Revit® Architecture 2011, Autodesk® Revit® MEP 2011 and Autodesk Revit Structure 2011 software share a common set of key enhancements for improved design functionality and workflow to help design teams accelerate better design with tools that promote productivity and support sustainable design and analysis. See the Autodesk Revit Platform Enhancements for 2011 backgrounder for information on platform enhancements.Enhanced Design Features (Fit and Finish)More Control and Easier Placement of Slanted Columns − Users can place slanted columns in a plan view and adjust the slanted column along an attached beam. Users can also cut the ends of a slanted column to an attached structural floor or slab and can even cut a slanted column horizontally, vertically or perpendicularly when it is not attached to an element.More Flexibility to Create and Modify Beam Systems − Use the Beam system tool to select a support such as a wall or beam to specify the direction of a beam system. Draw a sketch line inside or outside a beam system to specify beam direction, and remove a beam system but allow the beams to remain in place.More Flexibility When Placing and Modifying Trusses − Attach the bottom of a truss to a structural floor or foundation slab element and simultaneously sketch custom cords while the truss is attached. Remove a truss family while the truss chords and webs remain in place. Ability to Display More Accurate Representation at Concrete Joins − The software includes improvements to the joining and cleanup behaviors of concrete object end joins for complex profiles for column, beam and walls so the construction drawings reflect a more accurate representation of the physical model.More Rebar Options When Modeling and Documenting Concrete Reinforcement − Autodesk Revit Structure 2011 now provides structural reinforcement enhancements, such as 3D shape spiral rebar, reinforcement of slab edges, ability to configure rebar sets, additional hook bend radius and major spacing of area reinforcement in tags.More Flexibility for Automated and Manual Analytical Model Adjustments − Horizontally project from columns to the default plane, the auto‐detected plane or a named reference plane. Top or bottom vertical projection of a column will now auto‐detect to beams when structuralfloors are not present. For columns, engineers can use the top or bottom of a column analytical model as a source for manual analytical adjustment.Ability to Display Several New Symbolic Connection Types for Documentation − Autodesk Revit Structure 2011 provides several new connection symbol families that can be loaded and selected through a new interface in the Structural Settings dialog box.Improved Productivity (Ease of Use)Improvements to Help Make Everyday Tasks Easier▪Users can place 3D beams using 3D lines, edges and curves from geometry that is imported with CAD files, minimizing the need to re-create designs from the beginning in Autodesk Revit Structure.▪The Structural Framing Length Roundoff parameter can be specified for a beam family, overriding exact calculation of the beam length to a broader, more applicable length.▪For walls, there is now a Split Walls with Gap tool for easier wall panel creation.▪The span direction for metal deck floors is now controlled within the floor boundary creation tool rather than through the annotation tag.More Productivity Tools for Construction Documentation▪In previous releases of Revit Structure, the A (cross-sectional area) and W (weight) parameters were not accessible for use with schedules. With the newest release, these user-defined parameters can be used in schedules without the need to convert them into shared parameters for convenience and quantity takeoff (to calculate steel tonnage)purposes.▪Users can now add insulation (such as batt insulation) to detail views.Extended Capabilities (Design Extensibility)The following features are available only to Autodesk Revit Structure 2011 customers with a valid Autodesk® Subscription contract:Quicker and Easier Creation of Simple 3D Framing Models − Use the new module frame generator to more rapidly define and generate a simple 3D frame model. This tool generates structural elements such as columns, beams and supports based on specified geometric parameters assigned to the structure, helping users save design time by automating this process with fewer mouse-clicks.Quicker and More Accurate Modeling of Wall Framing Structures − Use the wood wall framing extension tool to more quickly and precisely model a wood frame structure within interior and exterior walls.More Accurate and Efficient 3D Bridge Models − Use the bridge extensions to more accurately and efficiently model 3D bridges and help generate typical 2D drawings of plans and sections. Define basic parameters of more complex bridge geometry, including road profiles, decks, abutments, piers and railings.Help Reduce Costly On-Site Redesign and Rework Caused by Improper Placement of Rebar Locations −The Interferences of Reinforcing Bars extension enables structural engineers and drafters to check for interference of reinforcements earlier in the design process. More easily generate a detailed list of conflicts and print in HTML format or export to Microsoft® Excel® and Microsoft® Word software.Interoperability Improvements for Creating 2D Drawings and Analysis Design▪Reinforcement Drawings Extension Update − Autodesk®Robot™ Structural Analysis Professional 2011 software elements imported from a Revit Structure file now appear inAutoCAD® Structural Detailing 2011 software, and rebar defined by the user is nowexposed in AutoCAD Structural Detailing.Reinforcement Design Extension Update − Improved rebar mapping functionality and user-defined rebar is now recognized in Robot Structural Analysis Professional 2011. Enhanced BIM Workflow (Enhanced Integration Between Autodesk Revit Structure 2011 and Autodesk Robot Structural Analysis Professional 2011) − Steel connections created in Revit Structure can now be transferred to Robot Structural Analysis Professional and vice versa. Help bring required reinforcement to Revit Structure for beams and columns. Also, the content generator mapping component helps to integrate the transfer of unrecognized profiles, materials and rebars between the two programs.Tools to Better Drive Engineers from BIM to Analysis (Load Takedown and Steel Composite Design Extensions) - the Load Takedown extension and the Steel Composite Design Extension that previously existed in the in Robot Extensions package are now part of the Revit Extensions package. Previously, these two extensions needed an Autodesk Robot Structural Analysis license in order to access these tools inside of the Revit Structure application. Now, these extensions will run inside of Revit Structure without the need to have Robot Structural Analysis installed on the same computer.Autodesk, AutoCAD, Revit and Robot are registered trademarks or trademarks of Autodesk, Inc., and/or its subsidiaries and/or affiliates in the USA and/or other countries. All other brand names, product names or trademarks belong to their respective holders. Autodesk reserves the right to alter product and services offerings, and specifications and pricing at any time without notice, and is not responsible for typographical or graphical errors that may appear in this document.© 2010 Autodesk, Inc. All rights reserved.。
Autodesk Revit-Robot Structural Analysis工作流程指南说明书

BLD125619-LIntegrating Structural Design and Analysis: The Basics of a Revit-Robot Structural Analysis WorkflowAaron Vorwerk, AIA, NCARB, EIT, LEED AP BD+C AutodeskExercise GuidePlease reference this document during our hands-on exercises. It has been formatted to position adjacent to your Revit/RSA/browser window.Exercise 1: Exploring the analytical model in RevitIn this exercise, we’ll develop an understanding of some of the differences between the physical and analytical models in Revit. Then we’ll look at the user-specified settings for analytical model verification. Exercise 1: Viewing the analytical model1.Open 01 – Simple Building.rvt.2.Open the View 1 – Analytical view andtile side-by-side with the default 3Dview.3.Select an element (e.g. a column) inthe default 3D view and review itsproperties. Select the same elementin the analytical view and note thedifferences.Exercise 1 (continued): Analytical Model Settings4.Switch to the Analyze tab.5.From the Analytical Model Tools panel,open the Structural Settings.6.Notice the options available here,including Automatic Checks for supported elements and model consistency, as wellas Tolerances defining user preferences.7.Close the dialogue box and select theCheck Member Supports button. Noticethe ‘warning’ that appear s to report thatno unsupported elements have beendetected.Exercise 2: Structural Analysis for RevitIn this exercise, we’ll use the Structural Analysis for Revit tool to perform a static analysis in the cloud. We’ll review the results both in a browser and in Revit.Exercise 2: Performing a structural analysis using Structural Analysis for Revit1.Open 02 - SAR.rvt and locate theAnalyze tab > Structural Analysispanel.2.Select Analyze in Cloud; configure aStatic analysis with the Analysis nameand Report name of your choice andselect Start. Note: You will need anAutodesk ID with access to theStructural Analysis for Revit serviceand cloud credits to perform steps 2-3.If you don’t have these, don’t worry!You will be able to participate whenwe return to Revit.3.Open your browser and navigate to toview the result.Exercise 2 (continued): Exploring results from Structural Analysis for Revit in the Revit environment4.In Revit, select Results Manager on theStructural Analysis panel.5.Select the AU static analysis that is listedas “in project”.6.Click the Explore button to open theResults Explorer.7.Choose Results for surfaces >Displacements > Displacement UZ andselect Apply to view results.Exercise 3: Code group design for steel members using Revit and RSA In this exercise, we’ll start by sending our model from Revit to RSA. We’ll then prepare and perform analysis on the structural model in RSA. We’ll review the results of the analysis and perform code group design on a selected set of members. Finally, we’ll send the model back to Revit and confirm that the round-trip was executed successfully. Exercise 3: Send the Revit model to RSA1.Open 03 - Start.rvt and locate theAnalyze tab > Structural Analysispanel.2.Select Robot Structural Analysis >Robot Structural Analysis Link.3.Leave default options and select OK.RSA will open and begin importing theRevit model data.4.Click Yes to the pop-up dialog to view theEvents Report; close the report afterviewing.Exercise 3 (continued): Configure the model display in RSA5.If load symbols are not displayed, goto View tab > Display > Loads andtoggle Load symbols off and on again,clicking Apply each time.6.Select OK to exit that dialog.7.Element visibility may also becontrolled using the toolbar at thebottom left edge of the drawingwindow, similar to the View Controltoolbar in Revit. Use this toolbar totoggle the display of Section shapes.Exercise 3 (continued): Adjust analytical geometry8.Select the analytical floor at Level 2.9.In the Properties Inspector (similar tothe Properties Palette in Revit) at theleft side of the screen, change theCalculation model for this floor fromShell to Deck slab (one-way).10.Repeat for the floor at Level 3.Exercise 3 (continued): Generate load case combinations11.Select Loads tab > AutomaticCombinations to open the Load CaseCode Combinations dialog.12.Select Full automatic combinations,then click More to view thecombinations in more detail.13.Select Generate to build out the loadcombinations list per ASCE 7-10.Exercise 3 (continued): Create finite element mesh14.Click the Options of FE MeshGeneration icon to open this toolbar,then choose Meshing Options (selectYes to the pop-up message to selectall panel elements).15.Select Complex mesh generation(Delaunay) and set the Element size to2 feet. Select OK.16.Select Generation of calculationmodel to create the FE mesh.17.Select Mesh Freeze to store this mesh;then close the toolbar.Exercise 3 (continued): Perform analysis 18.Time for analysis! If you’ve gotten lostalong the way, open 04 – Analysis.rtd tocatch up.19.Go to Analysis tab > Analysis Types toopen this menu. Observe additionalcapabilities under the New andParameters buttons.20.Select Calculations to run the analysis.Once completed, a green light at thebottom of the screen indicates thatcurrent results are available.Exercise 3 (continued): View results 21.Select Results tab > Maps to open thisdialog.22.Select the z direction forDisplacements – u,w and select Apply.23.Note the color mapping in RSA issimilar to the results previouslyexplored in Revit. The interior beamsof the top deck indicate the largestdisplacements; we’ll make them thefocus of this exercise.24.Deselect the z checkbox and selectApply again to remove the map.Exercise 3 (continued): Configure code group for design25.For this step, let’s change our RSA layout.Locate the Layouts toolbar and changefrom Geometry to Steel/AluminumDesign.26.Proceed to the Groups tab of theDefinitions dialog. Click New to create anew code group and enter members 104to 123 (the interior beams from the topdeck) in the Member list. Note: RSA offers many selection methods, but we aredirectly entering known bar numbers inthis example.27.Select Save.Exercise 3 (continued): Perform code group design with optimization28.Proceed to the Calculations dialog andselect the Code group design option.Enter 1 or use the List button to findand select group 1 using the “up”arrow icons.29.Select Optimization and check theWeight option. Select OK to close thisdialog. If you’re behind, open 05 –Design.rtd to catch up.30.Select Calculations to perform codegroup design for the selected settings.Exercise 3 (continued): Select optimal sections31.The Code Group Design module highlightsthe optimal section for the group (W 8x24 here). Click on the icon next to thissection to view results; select OK toreturn.32.In the Code Group Design dialog, selectChange all to resize the sections. Closethe dialog and Cancel saving thecalculation results.Exercise 3 (continued): Update the Revit modele Alt-Tab to switch back to Revit.As before, select Robot StructuralAnalysis > Robot Structural AnalysisLink.34.This time, choose Update model andclick OK. Alternatively, instead ofdirect integration, you can chooseUpdate from the intermediate file andselect 06 – Update.rtd. Ignore theevents report.35.Open the default {3D} view, hide thetop floor slab (by selecting it andtyping HH), and select one of theinterior beams to confirm its new sizein the Properties Palette.Congratulations…YOU DID IT。
智能机器人使用手册说明书
User ManualPrecautions!Precautions for BatteriesThe batteries (battery pack or batteries installed) shall not be exposed to excessive heat such as sunshine, fire or the like.Only use attachments/accessories specified or provided by the manufacturer (such as the exclusive supply adapter, battery etc).Do not touch the product when it is moving to avoid hand injuries.1.2.3.All example of use refer to warning card.Keep this product away from fire and keep it dry and clean.Do not squeeze this product with too much force during use.Please use the robot on a flat surface.Maintain an appropriate distance from the robot while it is in operation to avoid injuries.When the robot is in operation, do not forcibly bend its joints as to avoid hand injuries and damage to the machine.Please use the supplied charger for charging the robot.The servos for robot joints are precisely designed and should not be disassembled without authorization. Contact us if necessary.For repair services, go to your local after-sales service center or contact our customer support.When an abnormality is found during debugging, immediately press the Emergency Stop button and cut off the power as to avoid hand injuries and damage to the machine.Take necessary preventive measures when using the robot. Do not use it at heights or near any edges as it may fall off and result in damage.Man-made damage is not covered by our warranty.It is best to use the robot for no longer than 1 hour each time, which will extend the service life of the servo actuators.This product is not intended for children under 14 years of age.You will be provided with software updates if any. For some features, the latest update instruction shall prevail.Please use HDMI cables with good shielding layers and magnetic rings when connecting Yanshee to an external monitor.1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15.16.Immediately Cut off the power and contact us when:Warning:EmergencyStop buttonCAUTION: Danger of explosion if battery is incorrectly replaced. Replace only with the same or equivalent type.Disposal of a battery into fire or a hot oven, or mechanically crushing or cutting of a battery, that can result in an explosion.Leaving a battery in an extremely high temperature surrounding environment that can result in an explosion or the leakage of flammable liquid or gas.A battery subjected to extremely low air pressure that may result in an explosion or the leakage of flammable liquid or gas.a. The robot smokes or you smell something burning; orb. Water or any other foreign matter enters the robot; orc. The robot is damaged.The User Manual contains important information. Please keep it for future reference!4.5.6.An "Emergency Stop" button is on the top of the robot. When the robot is in operation, you can press this button to immediately cut off the power and stop its operation.01. Packing ListYanshee RobotUser Data Set*1(Quick Start Guide*1,Warranty Card*1)Yanshee Robot components: 1Quick Start Guide: 1Warranty card: 1Battery: 1Power adapter: 1Power cord: 1Spare parts kit: 1 (wires, screws)Screwdriver: 1Charging dock: 1 (Selective Accessories)Sensor Suite: 1 (Selective Accessories)Usage Examples: 1Front view of YansheeBackside view of YansheeIntroduction to GPIO Extended Port Note:Ports 3, 5, 12, 35, 38 and 40 are used, of which ports 3 and 5 are for I2C communication and ports 12, 35, 38 and 40 are for audio I2S signaling.GPIO Pinout DiagramPhysicalPin No.Function Function03. SpecificationsAppearanceElectrical SpecificationsConstructionHumanoid Product ModelERHA101Product NameYanshee ColorSilver Dimensions 370*192*106 (mm)Weight ≈2.05 kgServo Actuators 17 degrees of freedom (DOF)Operating voltage DC 9.6VPower 4.5W~38.4WPower adapterOperating temperature Material Aluminum alloy structure, PC+ABS housing0℃ to 40℃Input: 100V ~240V, 50/60Hz 1.5AOutput: 9.6V, 4AMaster Chip and MemoryNetworkVision SystemSTM32F103VDT6Broadcom BCM2837 1.2GHz 64-bit quad-core ARMv8 Cortex-A53RAM 1GBProcessorMemory 16GBBluetoothBluetooth 4.1Battery capacity 3000mAhCamera 8 mega-pixel camera, fixed focusLightWi-Fi Operating system RaspbianSupports Wi-Fi2.4G802.11b/g/n fast connectEyes: 3-color LED lights *2Chest: 3-color LED notification lights *3Microphone: green indicator *1Charge: dual-color indicator *1AudioSensorsDebugging PortOthers MicrophoneSingle SpeakerStereo speakers *29-axle motion tracking sensor *1Motherboard temperature sensor *1POGO 4PIN *6Built-in sensorExtended port HDMI1GPIO40 (6 of them are used)USB2Control Mode Mobile software (APP); voice control;PC control (Raspbian )KeysFor BT :Maximum OutputPower :5.636 dBmFor 2.4G WIFI :Maximum Output Power : 18.19dBm ON/OFF key on the chest;Emergency Stop key on the top Applicable Standard04. Download and Sign in to Mobile Software (APP)Download the APP:Sign in:APP Download QR Code YansheeMethod 1: Scan the QR code below to enter the APPdownload page where you can click to download theYanshee APP;Method 2: Search and download "Yanshee" in APPStore/Google Play/MyAPP or other platforms.After installing the APP, run the APP and sign in according to the instruction. If you are a registered user, log into the APP directly.Method 3: Log onto /en to searchfor your desired product and download the app.05. Assemble the RobotOpen and log into the APP. Select the assembly tutorial to learn about how to assemble or disassemble the robot from the menu bar.Select the disassembly tutorial to learn about how to disassemble the robot.06. Install and Charge the BatteryInstall the Battery• The battery compartment is below the left arm of the robot. Rotate the battery cover clockwise 90° to unlock it.• Install the battery into the battery cover and then reinstall the battery cover. Rotate the battery covercounter-clockwise 90° to lock it.Charge the BatteryMethod 1: After installing the battery, connect the power cord to the charge port on the back of the robot to charge the battery.07. Start the Robot and Set up the Network Method 2: Place the battery onto the dock charger, and then connect the power cord to the charge port of the dock charger to charge the battery.• Press and hold the button on the chest for 2-3 seconds and release until the indicator is lit up in blue. The robot is booted up after you hear a boot-up sound.• Make sure that both the Bluetooth and Wi-Fi are enabled on the smart devices. Open and log into the Yanshee APP, and click the icon on the upper left of the home screen to connect the robot and set up the network.• Refresh and search devices detected by the system, and select the device to be connected according to the last 4 digits of the MAC address value on the label attached ontothe back of the robot.• After the desired device is selected, the APP will selectthe SSID identical to the local Wi-Fi to be displayed on thepage. Enter the correct Wi-Fi password and click the"Join" button, the robot will set up and connect to thenetwork and also give you a voice prompt, saying"Connecting".Note:You will hear a voice prompt saying "Connected" after successful connection.If the connection fails, you will hear a voice prompt saying, "Connection Failed". In this case, please set up the network again.You do not have to set up the network again for later use, just directly select the desired device from the list.After setting up the network, you can use the APP to controlthe robot and learn more information.08. Use of Mobile APPFall-over ManagementThe mobile APP has a built-in graphic user interface and integrates features including motion tracking, FPV, Blockly visual programming, action readback programming, curriculums, BBS and real-time sensor data view.This feature is off by default. You can enable the feature via the APP. The robot can pick itself up if it falls over whenenabled.Language SwitchingBoth Simplified Chinese and English are supported so far. Goto your APP to select the desired language for the robot.09. Built-in Smart ApplicationsRaspbian OS issued by Raspberry Pi is used as the robot software. This open source software comes with the following features:Speech RecognitionThe robot is configured with speech recognition and semantic recognition for Chinese, allowing you to chat with it.When the robot started, press the button on the chest until the chest lamp turns green, then you can chat with the robot after a "tinkling" sound is heard.Visual ProcessingThe robot is configured with face analysis, face tracking and other features. You can call these functions through the programming tools in the APP or Raspberry Pi system. UBTECH provides the Open SDK API, which enables you to configure your own visual identification functions withthird-party visual identification platforms.Note: please abide by relevant laws when using thethird-party voice platform.Auto Update:After the robot is connected to the Internet, the built-in platform software will automatically detect whether you have the latest version and execute the update process.Do not cut off the power or disconnect from the Internet while updating.10. Open Source Platform(2). Use the USB port on the Yanshee to connect a USB, keyboard and mouse.The Yanshee robot is built on the Raspberry Pi open source platform and open SDK files are provided, allowing a user to configure, learn or develop smart Applications as desired, and also allowing developers to create their own robot.(1). Use an HDMI cable to connect the Yanshee robot to amonitor.(3). You can log onto the Linux system from Raspberry Pi bysimply starting the robot.(4). SDK API and Demo codes are available from(5). For developers, please visit https://to learn more information about Raspberry Pi./enThis device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy, and if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Reorient or relocate the receiving antenna.• Increase the separation between the equipment and receiver.• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.• Consult the dealer or an experienced radio/TV technician for help.FCC Caution:Any changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate this equipment.IMPORTANT NOTE:FCC Radiation Exposure Statement:This equipment complies with FCC radiation exposure limits should be installed and operated with minimum distance20cm between the radiator & your body.This transmitter must not be co-located or operating in conjunction with any other antenna or transmitter.FCC ID: 2AHJX-YANSHEE-1UBTECH ROBOTICS CORP LTDAdd: 16th & 22nd Floor, Block C1, Nanshan i Park, No. 1001 Xueyuan Road, Nanshan District, Shenzhen City, China P.R.T el: 800-276-61372019-09-25尺寸:95*130mm颜色:四色双面印刷材质:105g铜版纸工艺:骑马钉公差:±0.5mm。
ABB RobotStudio产品说明说明书

Virtual Robot browsertargets can be modified. virtual robot.IO SimulatorRobotStudio Automatic generation of targets along a curveRobotStudioThe Program EditorWith RobotStudio, the Program editor Program-Maker is included. Some of the main features of ProgramMaker includes:•Ability to check for syntactic and semantic errors, as robot programs are created or edited • Program data is displayed in a familiar“spreadsheet” format that is Microsoft Excel compatible•TCP Adjust, FrameAdjust and Mirror wizard • Automatic declaration of referenced data • The Tree View allows the user to view and navigate robot program structure in a simple, logical manner • Syntax colorization• Multiple routines can be viewed and edited at the same timeSimulation AutoReachWith AutoReach you can optimise the locations of the work piece and the robot. If the positions are reachable or not are clearly indicated in the graphics area.Collision DetectionCollisions between any objects in the station can be detected and visualised during robot simulation.You can select between detecting collisions for the whole station, or for a selected list of objects.Events- and I/O-SimulationBy using the Event table in RobotStudio you can respond to signals set in your robot program (so called IO events). This can be used in simulation of search-sequences or simulation of material handling when parts are gripped/released. For advanced simulation you can also connect the IO events to Visual Basic macros. This enables simulation of a complete station including equipment.Simulation MonitoringYou can monitor the results of the robot motion in your simulation. Simulation data such as robot-joint values and speed can be logged and stored.Your can follow the movement of the robot TCP by using the trace function that draws a line in the graphics area where the TCP is moved.Visual Basic for ApplicationsMicrosoft’s ®Visual Basic for Applications (VBA 6.3) is distributed with RobotStudio. VBA is an object based programming environment designed to provide rich development capabilities.Implemented in RobotStudio, these capabilities shorten the development times of custom solutions for customers and applications. VBA has full Visual Basic language syntax, the new forms package, and support for ActiveX Controls.By using VBA customised macros and applications can easily be developed to suit the special needs for a particular customer or to automate repetitive daily tasks. Most functionality available in the RobotStudio user interface is also available from VBA. In addition user defined menus and dia-logues can be added.ProgramMaker, the Program EditorRobotStudioRobotStudio Plus+ PacThe Plus+ Pac for RobotStudio adds extra usefulfeatures to the base of RobotStudio. The features ofthe RobotStudio Plus+ Pac are the following:Kinematics ModelerThe kinematics modeler is an essential module forthose who need to create their own mechanismssuch as tools, external axes and other movingdevices in a station.New Station WizardCreate a new station fast and easy by using theNew Station Wizard. The user is guided troughthe necessary steps to include a robot, tool,external axes and other parts in station.Pack and GoThe Pack and Go module stores a station with all its libraries into one single folder. Ready to compress, e.g. by using WinZip.Path ConfigurationIn order to get an accurate robot motion along a path, the robot configuration must be stored in each target. The Path Configuration module defines automatically the robot configurations along a path in order to obtain a smooth motion.Quaternion ConverterConverts between quaternion angles (used in the RAPID programming) and Euler angles (used in RobotStudio).Show/Blank BrowserAdds a new browser to the browser window. From this browser you can easily display and hide objects in your station. This is especially useful for users who work with large stations with many objects.Texture SupportAllow you to add textures (i.e. bitmaps) on object surfaces in your station, all to make the visual model even more realistic.ArcWeld PowerPacArcWeld PowerPac is a dedicated programming tool for generating arc weld programs. ArcWeld and RobotStudio utilize the CAD geometry as the basis for all robotics programming.The programmer defines weld locations on the CAD geometry and creates robot positions in relation to the geometry. ArcWeld automatically generates the weld path based on the input, and creates approach and depart paths that will move the robot in and out of the weld location. The semi-automatic optimization tool defines arm configurations along the weld path, and avoids joint-limit and singularity errors. ArcWeld automatically checks for reachability and notifies the user if any reachability problems occur. The result is an arc weld program ready for download.Figure 9 Show and Blank BrowserRobotStudioBendWizard PowerPacBendWizard improves the interface for program-ming the robot and press brake operation.The cell is shown in the 3D format with all peripheral components defined and the operator can program the different phases of the operation which include:•Loading the sheet from the feeding system •Double-thickness control•Centering the Part•Bending sequence•Overturning and palletizingThe system automatically verifies every phase of the program cycle including reachability of robot targets, the robots working envelope, potential interference and collision problems:When a problem is detected the operator has several tools available to make the necessary modifications. Once it’s done the program is converted to the robots operating language and downloaded. A first part program check is recommended. All of BendWizard’s processed data can be converted into reports for documen-tation and used for setting up future production runs or successive batches.Software and hardware requirements •Microsoft Windows NT 4.0 with Service Pack 6 or higher and Internet Explorer 4.0 SP2 or higher •Microsoft Windows 2000 Professional with Service Pack 1 or higher•Microsoft Windows XP ProfessionalRecommended hardwareCPU:Pentium III or higherMemory:256 MB RAM or moreFree disc-space:50 MB on the system disk900+ MB on the installation diskGraphics card:A high performance graphics card with OpenGL supportExamples for stationary PCs: 3Dlabs Wildcat III 6110, NVIDIA Quadro4 900 XGL, ATI FireGL 8800Examples for laptops: NVIDIA GeForce4 Go (available e.g. in Toshiba Satellite 5005-S507), ATI Mobility Radeon 7500 (available e.g. in Dell Inspiron 8100), ATI Mobility FireGL 7800 (available e.g. in IBM A31p)Screen resolution:1280 x 1024 pixelsThree button mouse。
【Robot中英对照说明书】(add ins)Preferences首选项

【Robot中英对照说明书】(add ins)Preferences首选项【Robot中英对照说明书】(add ins)Preferences首选项Preferences首选项Topics in this section本节主题•Preferences•首选项•Languages•语音•General Parameters•一般参数•View Parameters•视图参数Use this dialog to select parameters for displaying graphics.•使用此对话框可以选择显示图形的参数。
•Desktop Settings•桌面设置•Toolbar and Menu•工具栏和菜单•Printout Parameters•打印输出参数•Advanced•高级•Calculations (Autodesk® Robot™ Structural Analysis 360)•计算(Autodesk®Robot™结构分析360)To access this dialog, click Tools > Preferences, and then select Calculations from the list of parameters.•要访问此对话框,请单击“工具”>“首选项”,然后从参数列表中选择“计算”。
•3D View - Work Modes•3D视图-工作模式Parent topic:Preliminary Setup父主题:初步设置Preferences首选项To access the Preferences dialog:要访问“首选项”对话框:•Click Tools menu > Preferences••单击“工具”菜单>“首选项”•Click (Preferences).••单击(首选项)。
After you click , a dialog displays that lets you select or modify the Robot parameters.单击后,将显示一个对话框,可用于选择或修改Robot参数。
【Robot中英对照说明书】Create and Apply Structural Loads创建和应用结构荷载
【Robot中英对照说明书】Create and Apply Structural Loads创建和应用结构荷载Before you can analyze the structure, you need to create and apply load cases.在分析结构之前,需要创建和应用荷载工况。
1. Create Load Cases1创建荷载工况Load cases are the loads that act on the structure.荷载工况是作用在结构上的荷载。
For each case:对于每种情况:1. Assign a load case name and number. You can also keep the default values.1.指定荷载工况名称和编号。
也可以保留默认值。
2. Select a load case nature: dead, live, wind, snow, temperature, accidental or seismic.2.选择荷载工况性质:静荷载、活荷载、风荷载、雪荷载、温度、意外荷载或地震荷载。
3. Click Define to add the new definition to the list of defined load cases.3.单击“定义”将新定义添加到已定义荷载工况的列表中。
2. Apply Loads2施加荷载You can apply loads from the Load Definition dialog, or directly from the load tables.可以从“荷载定义”对话框或直接从“荷载表”应用荷载。
To define the loads acting in a defined case using load tables:要使用载荷表定义作用在已定义情况下的载荷,请执行以下操作:1. In the Loads table, select a load case from the Case column.1.在“负荷”表中,从“工况”列中选择一个工况。
Autodesk软件用户指南说明书

User GuideLegal NoticesAutodesk® Flame® 2014, Autodesk® Flame® Premium 2014, Autodesk® Flare™ 2014, Autodesk® Flint®2014, Autodesk® Inferno® 2014, Autodesk® Lustre® 2014, Autodesk® Smoke® Advanced 2014, Autodesk® Smoke® HD 2014, Autodesk® Backdraft® Conform 2014© 2013 Autodesk, Inc. All rights reserved. Except as otherwise permitted by Autodesk, Inc., this publication, or parts thereof, may not be reproduced in any form, by any method, for any purpose.Certain materials included in this publication are reprinted with the permission of the copyright holder.Portions related to MD5 Copyright © 1991-2, RSA Data Security, Inc. Created 1991. All rights reserved. License to copy and use this software is granted provided that it is identified as the “RSA Data Security, Inc. MD5 Message-Digest Algorithm” in all material mentioning or referencing this software or this function. License is also granted to make and use derivative works provided that such works are identified as “derived from the RSA Data Security, Inc. MD5 Message-Digest Algorithm” in all material mentioning or referencing the derived work. RSA Data Security, Inc. makes no representations concerning either the merchantability of this software or the suitability of this software for any particular purpose. It is provided “as is” without express or implied warranty of any kind. These notices must be retained in any copies of any part of this documentation and/or software.The following are registered trademarks or trademarks of Autodesk, Inc., and/or its subsidiaries and/or affiliates in the USA and other countries: 123D, 3ds Max, Algor, Alias, AliasStudio, ATC, AutoCAD LT, AutoCAD, Autodesk, the Autodesk logo, Autodesk 123D, Autodesk Homestyler, Autodesk Inventor, Autodesk MapGuide, Autodesk Streamline, AutoLISP, AutoSketch, AutoSnap, AutoTrack, Backburner, Backdraft, Beast, BIM 360, Burn, Buzzsaw, CADmep, CAiCE, CAMduct, CFdesign, Civil 3D, Cleaner, Combustion, Communication S pecification, Constructware, Content Explorer, Creative Bridge, Dancing Baby (image), DesignCenter, DesignKids, DesignStudio, Discreet, DWF, DWG, DWG (design/logo), DWG Extreme, DWG TrueConvert, DWG TrueView, DWGX, DXF, Ecotect, ESTmep, Evolver, FABmep, Face Robot, FBX, Fempro, Fire, Flame, Flare, Flint, FMDesktop, ForceEffect, FormIt, Freewheel, Fusion 360, Glue, Green Building S tudio, Heidi, Homestyler, HumanIK, i-drop, ImageModeler, Incinerator, Inferno, InfraWorks, Instructables, Instructables (stylized robot design/logo), Inventor LT, Inventor, Kynapse, Kynogon, LandXplorer, Lustre, MatchMover, Maya, Maya LT, Mechanical Desktop, MIMI, Mockup 360, Moldflow Plastics Advisers, Moldflow Plastics Insight, Moldflow, Moondust, MotionBuilder, Movimento, MPA (design/logo), MPA, MPI (design/logo), MPX (design/logo), MPX, Mudbox, Navisworks, ObjectARX, ObjectDBX, Opticore, Pipeplus, Pixlr, Pixlr-o-matic, Productstream, RasterDWG, RealDWG, ReCap, Remote, Revit LT, Revit, RiverCAD, Robot, S caleform, S howcase, S howMotion, S im 360, S ketchBook, S moke, S ocialcam, S oftimage, S parks, S teeringWheels, Stitcher, Stone, StormNET, TinkerBox, ToolClip, Topobase, Toxik, TrustedDWG, T-Splines, ViewCube, Visual LISP, Visual, VRED, Wire, Wiretap, WiretapCentral, XSI.ACE™, TAO™, CIAO™, and CoSMIC™ are copyrighted by Douglas C. Schmidt and his research group at Washington University, University of California, Irvine, and Vanderbilt University, Copyright (c) 1993-2009, all rights reserved.Adobe and Reader are either trademarks or registered trademarks of Adobe Systems Incorporated in the United States and/or countries. Automatic Duck and the duck logo are trademarks of Automatic Duck, Inc.FFmpeg is a trademark of Fabrice Bellard, originator of the FFmpeg project.Lucida is a registered trademark or trademark of Bigelow & Holmes in the U.S. and other countries.Python is a registered trademark of Python Software Foundation.All other brand names, product names or trademarks belong to their respective holders.DisclaimerTHIS PUBLICATION AND THE INFORMATION CONTAINED HEREIN IS MADE AVAILABLE BY AUTODESK, INC. “AS IS.” AUTODESK, INC. DISCLAIMS ALL WARRANTIES, EITHER EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE REGARDING THESE MATERIALS.2012-09-17ivContentsChapter 1What's New in F lame Premium 2014 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Chapter 2Getting Started with the New Workflow . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Chapter 3F lame Premium Interface Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 About the Media Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Media Icons and Selection Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Chapter 4Managing Projects and Users . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Working with Projects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Working with Users . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Chapter 5Organizing Media in the Workspace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 Changing Your View of the Flame Premium Workspace . . . . . . . . . . . . . . . . . . . . . . . . . 38Generating Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Displaying Media Metadata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Managing Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Working in Thumbnails View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Working with Reels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Undo and Redo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Chapter 6Setting Up a Flare Workflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 About Flare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Flare Workflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Considerations for Working in a Collaborative Environment . . . . . . . . . . . . . . . . . . . . . . 50Starting Flare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Changing Projects and Users . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52iChapter 7Importing and Exporting Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 Importing File-Based Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Exporting Clips and Sequences to Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Supported Media File Formats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69Importing a Final Cut Pro XML Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80Importing an AAF Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Importing an EDL Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110MediaHub Reference: Browsing for Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113Modifying Import Options After Import . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153Working with Others . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154Using Subtitles Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Conform Tab Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165Clip Input/Output Using a VTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196Clip Output Using Real-Time Deliverables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230Chapter 8Archiving in F lame Premium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243 Archiving a Project to a File-based Archive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244Restoring a Project from a File-based Archive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245Archiving Clips to a File-based Archive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246Restoring Material from a File-based Archive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247Tips for Using Archives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247Managing the Size of an Archive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249Configuring a Data Tape Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249About VTR Archives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254Archiving to Multiple Volumes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259Supplementing Archives with System Drive Backups . . . . . . . . . . . . . . . . . . . . . . . . . . 259Restoring Legacy Archives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263Deleting Content from an Archive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265MediaHub Reference: Browsing for Archives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265Chapter 9Playing Back Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267 Playback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267Cue Marks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271Playback Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272Color and Light Levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275Preview options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276Changing Playback Scan Mode Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276Enabling the Aspect Ratio Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277Setting up the Image Display Viewer in the Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277Displaying the Reference Area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277Displaying Multiple Views . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279Viewing Settings tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282Chapter 10Editing Clips and Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 Inserting a Clip on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286Overwriting a Clip on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288Replacing a Clip on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289Other Editing Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289Timeline Editing Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292Trimming Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298About Timeline Tracks and Versions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305About Timeline Patching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307Navigating and Searching the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308Using Markers on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310About Timeline Containers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310About Timeline Gaps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311Playing the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311 ii | ContentsRemoving Elements From the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314Matching Clips with Their Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315Grouping and Syncing Elements on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316Timeline Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318Chapter 11Editing on the Desktop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325 About Editing on the Desktop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325Gestural Editing on the Desktop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325Ganging Clips on the Desktop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327Cutting Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327Splicing Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329Inserting Frames and Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330Replacing Frames and Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331Matching Clips with Their Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332Swapping Segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333Hard Committing from the Desktop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334Rendering from the Desktop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335Chapter 12Audio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337 Accessing the Audio Desk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337Importing Audio Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338Monitoring Audio in Batch or Batch FX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338Adding an Audio Effect on a Segment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338Adjusting the Audio Levels on Part of an Audio Segment . . . . . . . . . . . . . . . . . . . . . . . . 339Cross-fading Two Audio Segments Together . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339Fading Audio Into or Out of a Clip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339Scaling the Size of the Waveform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340Displaying Audio Waveforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340Muting Audio Tracks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340Mapping Audio Tracks to Audio Desk Input Strips . . . . . . . . . . . . . . . . . . . . . . . . . . . 340Converting Audio from Stereo to Mono or Mono to Stereo . . . . . . . . . . . . . . . . . . . . . . . 341Chapter 13Timeline FX and Transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343 Working with Timeline FX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343Working with Timeline Transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348Working with Timeline FX and Transition Presets . . . . . . . . . . . . . . . . . . . . . . . . . . . 349Navigating Timeline FX and Transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349Adding Timeline FX to Gaps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350Working With Clip Format and Import Options on the Timeline . . . . . . . . . . . . . . . . . . . 3502D Compositing on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351Adding Matte Containers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351Working with Mattes and Masks on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352Compositing in 3D Space on the Timeline Using Action . . . . . . . . . . . . . . . . . . . . . . . . 355Keying on the Timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356Chapter 14Creating New Sources Using Tools from the Tools Tab . . . . . . . . . . . . . . . . . . . 359 Accessing Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359Chapter 15Procedural Compositing with Batch and Batch FX . . . . . . . . . . . . . . . . . . . . . . 361 Accessing Batch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361Creating Batch FX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362About the Batch and Batch FX Process Tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364Adding Clips to the Process Tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366Adding and Connecting Nodes to the Process Tree . . . . . . . . . . . . . . . . . . . . . . . . . . . 380Contents | iiiViewing Nodes in Context . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 390About Batch Rendering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391About BFX Output Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399Saving and Loading Batch or Batch FX Setups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400Saving Sources with Batch Snapshots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401Using a Create BFX Clip for Caching or Versioning . . . . . . . . . . . . . . . . . . . . . . . . . . . 402Using the Timing View to Offset Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402Caching Frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404Grouping Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406Mimicking, Copying, and Duplicating Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 410Customizing the Tools Bin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413Creating Custom Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417Batch and Batch FX Preferences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 418Chapter 16Compositing in 3D Space with Action . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421 About Action . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421About Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456About Axes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466About Surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473About Stereoscopic Workflow in Action . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 501About the Perspective Grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 507About Lights and Lighting Effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511About 3D Geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544About 3D Text . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563About Shading and Textures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 591About Atomize . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 647About 3D Paths . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 648About the Camera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654About the 3D Camera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 671About the Analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 688About Source Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 711About Action GMasks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 718About Action's Particle System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726Chapter 17Chroma Keying and Working with Green Screens . . . . . . . . . . . . . . . . . . . . . . 801 Setting Up the Nodes and Media to Pull a Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 802Setting Up Viewports for Keying . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804About the 3D Keyer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805Creating a Precise Key in the 3D Keyer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805Animating Key Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 817Mastering the RGB Viewer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 819More Keying Techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835Setting 3D Keyer Preferences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 837Creating and Refining a Key in the Master Keyer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 838Creating a Key by Extracting a Single Colour with the Channel Keyer . . . . . . . . . . . . . . . . . 847Creating a Key by Extracting a Range of Colours with the HLS, YUV, RGB and RGBCMYL Keyers . . 848Creating a Key by Setting the Luminance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852Refining Your Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852Resetting Your Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866Rendering Your Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866Chapter 18Stabilizing and Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 869 Accessing the Stabilizer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 869How the Stabilizer Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 870Working with Trackers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 872Selecting a Stabilizer Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876 iv | ContentsOne-Point and Two-Point Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 883Bilinear Surface Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 885Extended Bicubic Surface Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 886Perspective Surface Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 890Offsetting the Tracking Motion of the Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894Adjusting the Surface With the User Shape Channel . . . . . . . . . . . . . . . . . . . . . . . . . . 896Tracking Difficult Shots and Correcting Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 897Copying Shift Channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903Importing and Exporting Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903Chapter 19Masking and Rotoscoping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905 Using Region of Interest and the Tracer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 906Accessing the Garbage Mask Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 907About Garbage Mask Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 908Setting Mask Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 910About Drawing Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 911Drawing a Mask . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 912Adjusting the Number of Points in Freehand Segments . . . . . . . . . . . . . . . . . . . . . . . . . 915Garbage Mask Nodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916Changing the Priority Order of Masks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916Transforming the Mask . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 917Manipulating Vertices and Tangents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 917Animating Garbage Masks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 920Applying Motion Blur to Garbage Masks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926Blurring a Stationary Garbage Mask . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 928Rendering Garbage Masks in Interlaced Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 928Using Multiple Garbage Masks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 929Refining the Mask . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 930Saving Garbage Mask Setups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 941Loading Garbage Mask Setups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 942Preset Garbage Mask Setups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 943Importing and Exporting Raw Setup Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 943Creating Customized Wipes with Garbage Masks . . . . . . . . . . . . . . . . . . . . . . . . . . . . 944Chapter 20Colour Correcting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 947 About Colour Correcting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 947About the Colour Warper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 976Chapter 21Painting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015 Paint Node . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015Paint Tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1040Chapter 22Text and Titling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1137 Text Workflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1137Accessing the Text Tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1138Setup and Rendering Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1140Saving and Loading Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1141Adding Text to Clips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1144Creating Text Effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1148Loading Logos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1152Tabulating Text . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1153Spell Checking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1154Creating Text Rolls and Text Crawls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1154Animating Text . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1157Defining Styles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1163Changing Fonts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1165Contents | v。
Robot Star II 自动相机说明书

Unprecedented possibilities are offered by the electromagnetic remote-series release for the ROBOT S TAR I I . This opens up an interesting fi eld by taking " unnoticed" pictures, for example photos of animals taken on the hunting ground and others. The electromagnetic series release enables taking of up to 4 pictures a second with a single pressing of the release button. Distances of up to 30 m and more between camera and place of releasing can be overcome.
r
A progressive step for'W"ard!
'ROBOT STAR II with spring motor for
18 exposures, with Xenon 40 mm, fi1,9.
A progressive step forward is achieved with
the 'ROBOT STAR II
SCbneider-7ele-Xenar 150 mm,f / 4,5t
the very long focal length of this lens acts like a telescope and, if by magic, will bring the distant subject almost within your grasp. This lens gives slight vignetting at the corners,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【Robot中英对照说明书】What's New in Autodesk Robot Structural AnalysisProfessional 2021 【Robot中英对照说明书】What's New in Autodesk Robot Structural AnalysisProfessional 2021Autodesk Robot Structural Analysis Professional 2021的新增功能Here is the list of improvements in Autodesk Robot Structural AnalysisProfessional 2021.以下是Autodesk Robot Structural Analysis Professional 2021中的改进列表。
Steel Design Code Updates. The following new code regulations have beenimplemented:钢结构设计规范更新。
已实施以下新法规:Australia Code: AS 4100-1998 Rec.2016澳大利亚规范:AS 4100-1998 Rec.2016New Zealand Code: NZS 3404:1997新西兰代码:NZS 3404:1997South Africa Code: SANS 10162-1:2011南非代码:SANS 10162-1:2011These new code regulations can be specified in the Job preferences dialogunder the Steel/Aluminum structures option of Design Codes. See Design Codes.可以在“设计代码”的“钢/铝结构”选项下的“工作首选项”对话框中指定这些新的代码规则。
见设计规范。
Sequential Loading for Stories. Sequential self-weight now buildsconstruction stages for each story and collects results into a single loadcase. In successive iterations, the deformations for a given story arecalculated without considering the stiffness of the stories above. See SelfWeight Load.故事的顺序加载。
顺序自重现在为每个楼层构建施工阶段,并将结果收集到单个荷载工况中。
在连续迭代中,计算给定楼层的变形,而不考虑上述楼层的刚度。
请参见自重荷载。
Detailed Pressure for Panels from Wind Simulation. You can now specifywhether to apply pressure as an average load for a panel or as a load map withrelevant finite element mesh. By not selecting an average load, you can obtain an image of pressure maps on finite elements. This is particularly useful for wind load generation on curved geometry buildings such as silos. See Generate Wind Loads Automatically.风模拟中面板的详细压力。
现在可以指定是将压力作为配电盘的平均荷载还是作为相关有限元网格的荷载图。
通过不选择平均载荷,可以获得有限元上压力图的图像。
这对于曲线几何建筑(如筒仓)上的风荷载生成特别有用。
请参见自动生成风荷载。
Core Wall Results Improvements. Two enhancements improve core wall results analysis.心墙结果改善。
两个增强功能改进了核心墙结果分析。
You can now explore results in the local axis. See Core Walls.现在可以在局部坐标轴中浏览结果。
请参见核心墙。
You can now display core wall results for individual walls. See Diagrams for Core Walls.现在可以显示单个墙的核心墙结果。
心墙见示意图。
Use a Local Copy of Network Files You can now work from a temporary local copy of a structure model when working over a network. The file is synced with the source network file when saved and closed. This is useful when accessing projects with intermittent connectivity over a network. See General Parameters.使用网络文件的本地副本通过网络工作时,现在可以从结构模型的临时本地副本进行工作。
保存并关闭时,该文件与源网络文件同步。
这在通过网络访问具有间歇性连接的项目时非常有用。
请参见常规参数。
Support for High-Resolution Monitors. Robot Structural Analysis now supports 4K high-resolution displays by improving text visibility and scalability of the user interface.支持高分辨率显示器。
Robot Structural Analysis现在通过提高文本可见性和用户界面的可伸缩性来支持4K高分辨率显示。
What's New in Autodesk Robot Structural Analysis Professional 2020 Autodesk Robot Structural Analysis Professional 2020的新增功能Here is the list of improvements in Autodesk Robot Structural Analysis Professional 2020.以下是Autodesk Robot Structural Analysis Professional 2020中的改进列表。
Topics in this section本节主题Simulation and Analyses模拟与分析Steel Modules钢制模块Reinforced Concrete Modules钢筋混凝土模块Other Improvements其他改进Simulation and Analyses模拟与分析Code Combinations Regulations Updates代码组合规则更新The following new code combinations regulations have been implemented:已实施以下新的代码组合规则:•American Codes: LRFD ASCE 7-16 and ASD ASCE 7-16•Canadian Code: NBCC 2015.To find these new code combinations regulations:要找到这些新的代码组合规则:1. Click Tools Job Preferences Design Codes.2.单击“工具”“作业首选项”“设计代码”。
The Job Preferences dialog opens.将打开“作业首选项”对话框。
3. Select Loads in the left panel of the Job Preferences dialog.在“作业首选项”对话框的左侧面板中选择“加载”。
4. Click the arrow from the Code combinations drop-down list to open the list of available codes.5.单击“代码组合”下拉列表中的箭头以打开可用代码列表。
Note: The codes available in the drop-down lists depend on the country selected in the Preferences dialog. To configure the list of available codes, click the arrow, and thenclick More at the bottom of the list.注意:下拉列表中可用的代码取决于在“首选项”对话框中选择的国家。
要配置可用代码的列表,请单击箭头,然后单击列表底部的“更多”。
Calculation Solver Improvements计算求解器改进Seismic Analysis According to ASCE 7-16根据ASCE 7-16进行地震分析The new instance of the American standard ASCE 7-16 has been implemented.美国标准ASCE 7-16的新实例已经实施。
To find this new seismic code:要找到这个新的抗震规范:1. Click Tools Job Preferences Design Codes.2.单击“工具”“作业首选项”“设计代码”。
The Job Preferences dialog opens.将打开“作业首选项”对话框。
3. Select Loads in the left panel of the Job Preferences dialog.4.在“作业首选项”对话框的左侧面板中选择“加载”。