执行器选择习题
气动执行器的力矩控制考核试卷
9.在气动执行器力矩控制系统中,__________可以实现对执行器输出力矩的精确调整。
10.为了提高气动执行器力矩控制的精度,可以采取__________和__________等措施。
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
2. PID控制器用于调节执行器的输出力矩,P(比例)减小稳态误差,I(积分)消除静态误差,D(微分)改善动态性能,防止超调和振荡。
3.检测漏气可通过观察执行器动作或使用泡沫水等方法,解决措施包括检查密封件、紧固连接件、更换损坏部件等。
4.常见故障如执行器输出力矩不稳定可能是由于气源压力波动、伺服阀故障或传感器损坏等原因,解决措施包括检查气源系统、更换故障部件、调整控制器参数等。
气动执行器的力矩控制考核试卷
考生姓名:__________答题日期:__________得分:__________判卷人:__________
一、单项选择题(本题共20小题,每小题1分,共20分,在每小题给出的四个选项中,只有一项是符合题目要求的)
1.气动执行器按照结构分类,不包括以下哪一种?()
A.活塞式
A.活塞式
B.摆动式
C.螺线管式
D.旋转式
6.气动执行器在力矩控制中,哪些因素可能导致控制不稳定?()
A.气源压力波动
B.传感器精度低
C.控制器参数设置不当
D.执行器漏气
7.以下哪些方法可以改善气动执行器的力矩控制性能?()
A.优化PID参数
B.使用高精度传感器
C.提高气源压力
D.增加执行器负载
8.气动执行器的力矩控制系统中,伺服阀的作用是什么?()
机器人末端执行器-考试

机器人末端执行器1具有齿形指面的夹钳式手部,一般适合拾取。
[ 单选题:6 分]A 已加工具有光滑表面的零件B 粗糙的毛坯件C 具有较大平面的零件D 易碎类零件试题解析您的答案:B回答正确2指端为平面的夹钳式手部,一般适合拾取零件。
[ 单选题:6 分]A 棒类B 球类C 具有平行平面的D 易碎类试题解析您的答案:C回答正确3气吸式手部的工作原理为吸盘内部气压应外界大气压[ 单选题:6 分]A 大于B 小于C 等于D 以上都不对试题解析您的答案:B回答正确4以下哪项非工业机器人手部的特点[ 单选题:6 分]A 其开合动作不计入机器人自由度B 通用性差C 是一个独立的部件D 一般适合拾取多种类型的工件试题解析您的答案:D回答正确5真空发生器利用了进行工作的。
[ 单选题:6 分]A 热力学效应B 光学效应C 伯努利效应D 以上都不对试题解析您的答案:C回答正确6气吸式的应用特点包括[ 多选题:8分]A 依靠摩擦力拾取工件B 适合夹取易碎类零件C 需要工件有两个可夹持的表面D 一般需要工件平整无凹槽试题解析您的答案:BD回答正确7夹钳式手部一般包括[ 多选题:8分]A 手指B 驱动部分C 传动部分D 支撑部分试题解析您的答案:ABCD回答正确8夹钳式手部中的传动机构用以[ 多选题:8分]A 改变力的大小B 改变速度大小C 改变运动方向D 改变运动形式试题解析您的答案:ABCD回答正确9为了增大夹钳式手部与工件之间的摩擦力,可以采用[ 多选题:8分]A V型指端B 光滑的指面C 齿形指面D 柔性指面试题解析您的答案:CD回答正确10气吸式手部按压力差形成方法不同可分为[ 多选题:8分]A 真空吸附式B 气流负压吸附式C 挤压排气式D 充气式试题解析您的答案:ABC回答正确11气流负压吸附式手部需要压缩的高压气体来实现[ 判断题:6分]正确错误试题解析您的答案:正确回答正确12具有平动型传动机构的机器人手部,其一般由一个平行四边机构来驱动手指运动。
机器人服务行业智能传感器与执行器技术考核试卷
B.实现机器人的感知功能
C.提供机器人的动力来源
D.实现机器人的精细操作
7.以下哪些传感器适用于位置检测?()
A.旋转编码器
B.光电传感器
C.霍尔传感器
D.压力传感器
8.下列哪些是智能传感器集成的常见技术?()
A.微电子技术
B.集成电路技术
C.通信技术
D.材料科学
9.以下哪些因素会影响执行器的性能?()
A.可以通过有线方式连接
B.可以通过无线方式连接
C.连接方式不影响性能
D.有线连接比无线连接传输速率慢
16.在机器人服务行业中,哪一种执行器通常用于实现精细动作?()
A.齿轮电机
B.伺服电机
C.直流电机
D.交流电机
17.以下哪种传感器的工作原理基于电磁感应?()
A.光电传感器
B.霍尔传感器
C.热敏传感器
1.智能传感器在机器人服务行业中主要起到的作用是()
A.信号采集
B.信号处理
C.信号传输
D.信号存储
2.以下哪一种传感器通常用于机器人的距离检测?()
A.光电传感器
B.声波传感器
C.磁感应传感器
D.温度传感器
3.执行器在机器人中主要负责的是()
A.控制机器人的思考过程
B.接收传感器信号
C.转换电能为机械能
三、填空题(本题共10小题,每小题2分,共20分,请将正确答案填到题目空白处)
1.在机器人服务行业中,智能传感器的主要作用是对环境进行______和______。
()()
2.执行器根据控制信号将电能转换为机械能的过程称为______。
()
3.传感器输出的信号一般需要经过______和______两个阶段处理。
电子电路的工业自动化执行器考核试卷
4.在工业自动化系统中,如何通过电子电路和执行器的配合实现节能控制?请结合实际案例分析,阐述具体的实现方法和效果。
标准答案
一、单项选择题
1. B
2. A
3. C
4. B
5. B
6. C
7. C
8. C
9. B
5. √
6. ×
7. ×
8. √
9. √
10. ×
五、主观题(参考)
1.电子电路在工业自动化执行器中的应用包括信号放大、信号转换、控制逻辑实现等。例如,一个温度控制器使用电子电路来放大传感器信号,并与设定值比较,以调节执行器(如电动阀门)的开度,保持恒定温度。
2.伺服电机采用闭环控制,具有高精度和高响应速度,适用于精密定位;步进电机采用开环控制,成本低,适用于简单定位。伺服电机优点在于其控制精度和响应速度,缺点是成本较高;步进电机优点在于成本低,缺点是控制精度和响应速度有限。
C.电感
D.晶体管
11.以下哪个部件不属于PLC的基本组成部分?()
A.输入模块
B.输出模块
C.电源模块
D.显示器模块
12.以下哪种电机在启动时不需要额外的启动设备?()
A.交流异步电机
B.直流同步电机
C.交流同步电机
D.伺服电机
13.以下哪种传感器常用于检测执行器的速度?()
A.温度传感器
B.位置传感器
3.气动执行器的工作介质是压缩空气。()
4.在工业自动化中,开环控制系统的控制效果通常比闭环控制系统差。()
5.电子电路中的滤波器可以用来滤除不需要的信号。()
6.变频器只能用来降低电机的运行速度。()
气动执行器动态响应分析考核试卷

4.例如:在机器人定位控制中,优化气动执行器的动态响应可以提高定位精度和速度。优化措施包括选用合适的阻尼比、自然频率,减少气源压力波动,改进执行器结构等。
D.气容减少,系统超调量减小
4.下列哪种情况下,气动执行器的动态响应会变慢?()
A.气源压力降低
B.气管路长度缩短
C.执行器负载减小
D.气动元件内泄漏增加
5.关于气动执行器的动态响应,以下哪个描述是正确的?()
A.响应时间与频率成正比
B.超调量与阻尼比成正比
C.稳定性与气源压力成正比
D.阻尼比与系统振荡频率成正比
2.在阶跃信号作用下,气动执行器的输出响应曲线的超调量是由系统的______和______决定的。()
3.为了提高气动执行器的动态稳定性,可以采取的措施包括增加______和减少______。()
4.气动执行器的自然频率是由其______和______决定的。()
5.在气动执行器的设计中,减少______和增加______可以帮助减小稳态误差。()
16.在气动执行器系统中,以下哪个现象说明系统存在欠阻尼状态?()
A.响应速度快
B.系统振荡频率高
C.超调量大于0
D.稳态误差为0
17.关于气动执行器的阻尼比,以下哪个描述是正确的?()
A.阻尼比越大,系统响应越快
B.阻尼比越小,系统超调量越小
C.阻尼比与系统稳定性成正比
D.阻尼比与自然频率成反比
18.在气动执行器动态响应分析中,以下哪个参数可以衡量系统对负载变化的敏感程度?()
纺织设备执行器选型与调试考核试卷
B.液压缸
C.气缸
D.电动缸
16.在纺织设备执行器调试过程中,以下哪种情况说明执行器调试合格?()
A.执行器运行速度达到规定值
B.执行器运行过程中无异常噪音
C.执行器在负载下能稳定运行
D. A、B和C
17.以下哪个执行器在纺织设备中具有较高的成本效益?()
A.伺服电机
B.液压缸
C.气缸
D.电动缸
D.进行负载测试
7.在纺织设备中,以下哪些情况下需要特别注意执行器的散热问题?()
A.高温环境
B.长时间连续工作
C.高负载应用
D.小型执行器
8.以下哪些执行器特点有利于纺织设备的高效率生产?()
A.快速响应
B.高精度控制
C.低能耗
D.易于维护
9.纺织设备执行器调试时,以下哪些步骤是必要的?()
A.确认执行器的安装位置
()
2.在纺织设备执行器调试中,为了保证执行器的正常工作,需要检查执行器的______是否正确无误。
()
3.伺服电机在纺织设备中的主要作用是提供精确的______控制。
()
4.纺织设备执行器的选型需要根据负载的______和动作要求来确定。
()
5.在纺织设备中,气缸执行器的优点是结构简单、响应______。
18.在纺织设备执行器选型过程中,以下哪个因素可能导致执行器选型失败?()
A.忽视负载类型
B.电气参数不匹配
C.环境温度过高
D.执行器品牌
19.以下哪个执行器在纺织设备中具有较大的负载能力?()
A.气缸
B.电动缸
C.液压缸
D.伺服电机
20.在纺织设备执行器调试过程中,以下哪个步骤是调试结束后的必要工作?()
第四章执行器练习题
第四章执行器练习题
一填空题
1.在自动控制系统中控制器的作用是通过()完成的。
2.电动执行器具有(),便于集中控制等优点。
3.选用不同的()和装配形式,可以改善阀门流量特性和正反作用形式。
4.气开、气关的选择与()有关,其原则是一旦信号中断,调节阀的状态能保证人和设备的安全。
5.一般的蒸气锅炉阀选择()阀,一旦控制信号中断,阀处于全开状态,保证供水,不至于烧坏锅炉。
6.用来控制加热炉的燃料油的控制阀,一般选用()阀,当控制信号中断后,阀就处于关闭状态,保证燃料供应中断,燃烧停止。
7.调节阀从信号的控制作用来看,可分为()和()两种形式。
二、判断题
1.阀门定位器是气动执行机构的辅助装置,按输入信号来分,可分为气动阀门定位器和电—气阀门定位器。
()
2.直通双座阀不宜用在高黏度、含悬浮颗粒和含纤维的场合。
()
3.隔膜阀泄漏量大,不能用于腐蚀性的场合。
()
4.按所用能源形式不同,执行器可分为电动、液动、手动三类。
三、选择题
1.气动执行器由()和控制机构两部分组成。
A.气动调节机构B.气动执行机构
C.电气转换机构D.阀门定位器
2.气开气关的选择与()有关。
A.控制器形式B.管道的位置
C.生产安全D.工艺要求
3.阀门定位器的作用不包括()。
A.改善静特性B.改善动特性
C.实现串级控制D.改变正反作用形式
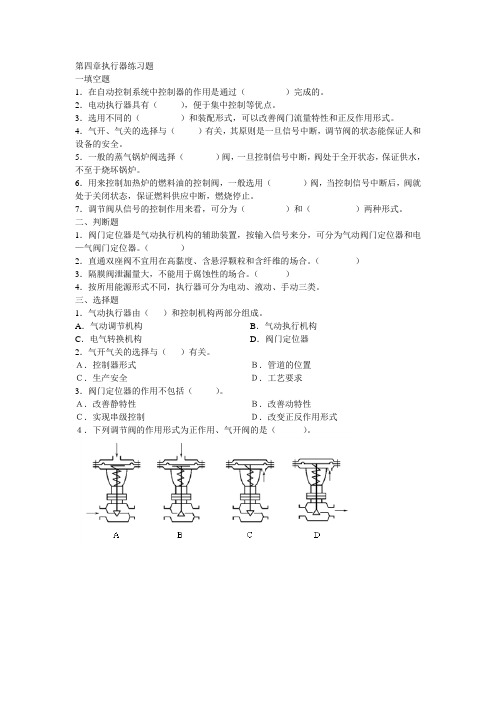
4.下列调节阀的作用形式为正作用、气开阀的是()。
气动执行器的气动伺服控制考核试卷

18.以下哪些情况可能导致气动执行器不能正常工作?()
A.气动伺服阀堵塞
B.气动执行器内部泄漏
C.控制信号丢失
D.所有以上情况
19.气动执行器在自动化设备中的应用,以下哪些说法是正确的?()
A.可以实现快速启动和停止
B.可以在恶劣环境下工作
C.维护成本较低
D.所有以上说法
20.以下哪些是气动伺服控制系统的优势?()
1.活塞式气动执行器适用于直线运动。()
2.气动伺服阀的响应速度越快,系统的稳定性越好。()
3.在气动伺服控制系统中,位置传感器通常安装在气动执行器的负载端。()
4.气动执行器的气动伺服控制系统不需要进行日常维护。()
5.摩擦力对气动执行器的动态性能没有影响。()
6.气动伺服控制系统中的气动执行器可以瞬间启动和停止。()
C.摩擦力
D.气动伺服阀的状态
6.在气动伺服控制系统中,以下哪些方法可以提高气动执行器的定位精度?()
A.提高气动伺服阀的响应速度
B.增加位置传感器的精度
C.使用高精度的控制器
D.所有以上方法
7.气动伺服阀在气动伺服控制系统中的作用包括以下哪些?()
A.控制气体的流量
B.控制气体的压力
C.控制气动执行器的方向
D.位置增益
13.以下哪种控制算法常用于气动执行器的位置控制?()
A. PID控制
B.模糊控制
C.神经网络控制
D.所有以上选项
14.气动执行器在运行过程中,以下哪个因素会导致其输出力矩减小?()
A.气源压力降低
B.摩擦力增大
C.气动伺服阀故障
D.所有以上选项
15.在气动伺服控制系统中,以下哪个部件用于实现气动执行器的方向控制?()
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例:如图所示的水槽,其进水流 量为q1,出水流量为q2,用户要 求水槽液位h维持在某一给定值上 下,或在某一小范围内变化,并 保证水槽中的水不产生溢出。试 分别以进水流量为q1和出水流量 为q2为控制量,设计两个不同单l System & Instrumentation
TC
TT
热水
Process Control System & Instrumentation
解: 1)
f(t) r(t) z(t) e(t) 温度控制 u(t)
器TC 调节阀
q(t)
化工过程
y(t)
温度检测 变送TT
Process Control System & Instrumentation
答:气动执行器由气动执行机构和调节 机构两部分组成。执行机构是执行器的 推动装置,它按调节器输出气压信号 (20~100KPa)的大小产生相应的推 力,使执行机构推杆产生位移,推动调 节机构动作。调节机构是执行器的调节 部分,其内腔直接与被调介质接触,调 节流体的流量。
Process Control System & Instrumentation
Process Control System & Instrumentation
4)以进水流量q1为控制量时:反作用。理 由:调节阀为正作用,水槽为正作用,液 位检测变送LT为正作用,为使系统形成负 反馈,所以液位控制器LC应选择反作用。 以出水流量为q2为控制量时:反作用。理 由:调节阀为反作用,水槽为反作用,液 位检测变送LT为正作用,为使系统形成负 反馈,所以液位控制器LC应选择反作用。
Process Control System & Instrumentation
5、气动调节阀的执行机构的正,反 作用形式是如何定义的?在结构上有 何不同?
答:气动调节阀的执行机构的正作用是 指:当阀芯向下位移时,阀芯与阀座之 间的流通截面积减少,称为正作用,或 正装;反之,则称为反作用。只要改变 阀杆与阀芯的连接位置就可改作反装。
Process Control System & Instrumentation
4.试简述电—气阀门定位器的工作原理。
答:来自调节器的直流电流信号,经过力矩马达 的线圈,使主杠杆磁化并绕其支点反时针方向转 动,喷嘴靠近挡板,P背上升,经放大后送入薄 膜调节阀,空气压力上升,推动阀杆下移,带动 凸轮逆时针旋转。副杠杆左移,带动反馈弹簧, 当从反馈=从力矩马达时。主杠杆停在新的平衡 位置。因此,阀杆的位移与输入的电流之间有一 一对应的关系,而阀杆位移量与开度之间的关系 是确定的,所以电流信号就能使阀位确定下来, 这就是电—气阀门定位器的工作原理。
2、试分析说明调节阀的流量特性理想 流量特性及工作流量特性。
答:调节阀的流量特性是指被调介质流 过阀的相对流量与阀门的相对开度之间 的关系,即: 。调节阀的理想流量 特性是指在调节阀前后压差一定情况下 的流量特性,在实际使用调节阀时,由 于调节阀串联在管路中或与旁路阀并联, 因此,阀前后的压差总在变化,这时的 流量特性称为调节阀的工作流量特性。
Process Control System & Instrumentation
请判定图所示温度控制系统中,调节阀 和调节器的作用型式。
Process Control System & Instrumentation
1.当物料为温度过低时易析出结晶颗粒 的介质,调节介质为过热蒸汽时; ( ) 2.当物料为温度过高时易结焦或分解的 介质,调节介质为过热蒸汽时; ( ) 3.当物料为温度过低时易析出结晶颗粒 的介质,调节介质为待加热软化水时; ( ) 4.当物料为温度过高时易结焦或分解的 介质,调节介质为待加热软化水时; ( )
Process Control System & Instrumentation
例:在如图所示的化工过程中,化学反 应为吸热反应。为使化学反应持续进 行,必须用热水通过加热套加热反应 物料,以保证化学反应在规定的温度 下进行。如果温度太低,不但会导致 反应停止,还会使物料产生聚合凝固 导致设备堵塞,为生产过程再次运行 造成麻烦甚至损坏设备。为此设计如 图所示的温度控制系统(示意图)。要 求:
LC
q1
q1
LT
LT
LC
q2
q2
Process Control System & Instrumentation
2)以进水流量q1和出水流量q2为控制量的 系统方框图都可以表示为:
f(t) r(t) z(t) e(t)
液位控制 器LC
u(t)
调节阀
q(t)
水槽
h
液位检测 变送LT
3)以进水流量q1为控制量时选择气开型式; 以出水流量为q2为控制量时选择气关型式; 理由:保证气源中断等故障情况下水槽中 的水不产生溢出。
1)分别画出所设计控制系统的示意图; 2)分别画出所设计控制系统的方框图; 3)分别选择调节阀的气开、气关特性, 说明理由; 4)分别选择控制器的正反作用,说明理 由。
q1
h
q2
Process Control System & Instrumentation
解: 1)以进水流量q1和出水流量q2为控制 量的系统示意图分别为:
Process Control System & Instrumentation
A 气关调节阀,正作用调节器 B 气开调节阀,反作用调节器 C 气开调节阀,正作用调节器 D 气关调节阀,反作用调节器
Process Control System & Instrumentation
1、气动执行器主要由哪些部分组成 的?各部分的作用是什么?
Process Control System & Instrumentation
4)正作用。理由:调节阀为反作用,化 工过程为正作用,温度检测变送TT为正 作用,为使系统形成负反馈,所以温度 控制器TC应选择正作用。
Process Control System & Instrumentation
Process Control System & Instrumentation
4) 副控制器为正作用;理由:阀是反作用, 副对象正作用,副检测变送正作用,为构 成内环为负反馈,所以控制器为正作用。 主控制器为正作用;理由:内环为正作用, 主对象为反作用,主检测变送为正作用, 为构成负反馈,所以主控制器为正作用。
Process Control System & Instrumentation
1)画出该控制系统方框图; 2)指出该控制系统中的被控过程、被 控参数、控制参数和扰动参数各是什 么? 3)选择调节阀的气开、气关特性,说 明理由; 4)选择控制器的正反作用,说明理由。
Process Control System & Instrumentation
qv qv max l f( ) L
Process Control System & Instrumentation
3、试分析电—气转换器的工作原理。
答:电—气转换器按力矩平衡原理工作,当恒 定磁场量的测量线圈通电,所产生的磁通与磁 钢在空气隙中的磁通相互作用而产生一个向上 的电磁力(即测量力)。由于线圈固定在杠杆 上,使杠杆绕十字簧片偏转,于是装在杠杆另 一端的挡板靠近喷嘴,使其背压升高,经过放 大器功率放大后,一方面输出,一方面反馈到 正负两个波纹管,建立起与测量力矩相平衡的 反馈力矩。因而输出气压信号(0.02~~ 0.1MPa)就与线圈电流信号成一一对应关系。
2)被控过程:化工过程(化学反应器、 反应炉等);被控参数:温度;控制参 数:热水进水量;扰动参数:热水流量、 压力的变化等。 3)选择气关型式;理由:为防止气源中 断等故障情况下化工过程温度太低不但 会导致反应停止,还会使物料产生聚合 凝固导致设备堵塞,为生产过程再次运 行造成麻烦甚至损坏设备。