Matlab_Simulink中Clark变换和Park变换的深度总结
clark park变换原理

clark park变换原理【原创版】目录1.介绍 Clark Park 变换2.阐述 Clark Park 变换的原理3.分析 Clark Park 变换的应用4.总结 Clark Park 变换的优势与局限性正文【介绍 Clark Park 变换】Clark Park 变换,是一种广泛应用于信号处理、图像处理以及通信领域的线性变换方法。
其主要目的是将数据从一种域(例如时域、频域等)转换到另一种域,以便于进行更有效的处理和分析。
Clark Park 变换以其独特的构造方法和优秀的性能,成为了线性变换领域的一种重要技术。
【阐述 Clark Park 变换的原理】Clark Park 变换的原理主要基于线性代数的概念,其核心思想是将原始数据通过矩阵的乘积进行变换。
具体来说,设原始数据为 x(n),变换后的数据为 y(n),矩阵 A 为变换矩阵,那么 Clark Park 变换可以表示为:y(n) = A * x(n)其中,A 矩阵的构造方法可以根据不同的应用场景进行调整,以满足不同的变换需求。
这种矩阵乘积的方式使得 Clark Park 变换具有很好的可扩展性和可定制性,可以根据实际需求灵活地进行设计和调整。
【分析 Clark Park 变换的应用】Clark Park 变换在信号处理、图像处理以及通信领域都有着广泛的应用。
例如,在信号处理领域,Clark Park 变换可以用于信号的滤波、降噪、特征提取等任务;在图像处理领域,Clark Park 变换可以用于图像的增强、锐化、边缘检测等任务;在通信领域,Clark Park 变换可以用于信号的调制、解调、信道均衡等任务。
这些应用都充分体现了 Clark Park 变换的强大功能和灵活性。
【总结 Clark Park 变换的优势与局限性】总的来说,Clark Park 变换具有以下优势:首先,Clark Park 变换具有很好的可扩展性和可定制性,可以根据实际需求灵活地进行设计和调整;其次,Clark Park 变换的性能优秀,可以有效地完成各种信号处理、图像处理以及通信任务;最后,Clark Park 变换的实现简单,计算复杂度较低,便于实际应用。
Clark变换与Park变换
当P = 时,坐标变换前后电压空间矢量幅值不变;
当P = 时,坐标变换前后电机功率不变。 推导过程: ①恒功率变换
iα = i − 0.5i − 0.5i
幅值: 1 + + = 倍
√3 √3 iβ = 2 i − 2 i
=>k ∗
= 1 => k =
②等幅值变换 在复平面上的矢量V⃗总能用互差 120 度的 abc 三轴系中的分量 xa、 xb、xc 等效表示(a 轴与复平面实轴重合),如下所示(x⃗和x⃗ 将 合成矢量V⃗)。 x⃗ = k(x + ρx + ρ x )``````````````(1) x⃗ = k (x + x + x )``````````````` (2) 其中,ρ = e = − + j √ 、ρ = e = e = − − j √ ;x⃗ 的 方向与复平面的实轴方向一致。所以有式(2)可以表示为 x = k (x + x + x )````````````````(3) 写出式(1)的实部与虚部如下: R {x⃗} = k x − x − x = k x − (x + x ) ```````(4) I {x⃗} = k √ (x − x )``````````````````````````````````````````(5) 由式(3)可得: x + x = − x ```````````````````````````````````````````````(6) 将(6)代入式(4)中可得: R {x⃗} = k x − − x = 1.5kx − 0.5 ````````` (7) 等幅值变换时,规定x = R {x⃗} + x ,所以有: R {x⃗} = x − x `````````````````````````````````````````````````(8) 将(8)代入式(7)中可得: 1.5kx − 0.5 = x − x ````````````````````````````````````(9)
番茄的随笔4之Park变换理论研究报告_20220716

番茄的随笔4之Clark变换与Park变换1.概述PID变换是工业控制领域中最常用最普遍的控制算法,超过80%以上的控制使用PID结构或概念。
然而,PID控制只能实现对直流信号的无差控制。
对于交流信号的跟踪控制,无差控制的实现方式有两种:一是设计一种能够对交流信号无静差的控制器(如比例谐振控制器,PR控制);二是将交流信号转化为直流信号,从而可以继续采用PI控制器。
现在三相电机或者储能换流器设备中的控制及采用了后一种方式。
Park变换和Clark变换正是把三相对称交流电信号控制转换到直流信号控制的一套理论。
其实,很容易理解,PID控制理论毕竟已经侵淫多年,PR控制刚刚起步,研究新的技术问题肯定是想着把这个问题转换到自己熟悉的理论再用积累解决问题,而不是再一个新的理论上深入研究。
2.前提无论是三相电机还是储能换流器在控制中都有一个共同点:三相电,即频率固定(工频50Hz),幅值对称相等(三相幅值相同),相位相差120°。
坐标变换注意区分空间向量和时间相量。
三相电的对称性体现在任意时刻其数值和为零,但电机中的坐标变换不仅是数值上的计算更是空间位置的变换。
3.Clark变换图1Clark 变换坐标图直角坐标系下,三相电方程如下:()())120cos(120cos cos ︒+=︒-==wt V V wt V V wt V V m C m B m A (公式3-1)电机的定子排列中,在圆形转筒内,三相电的空间分布是按照彼此相差120°的角度进行排列的,这里三相电的相位和三相电在转筒内的空间角度不要混为一谈。
公式3-1给出了三相电在任意时刻的瞬时值Va ,Vb ,Vc ,这三个值在任意时刻相加的和始终为0,这是三相对称电的来由,但注意这个相是“相”。
而我们将三相电再加上空间角度以后形成的就是这个“向”,带有方向。
在电机圆筒内,我们以相差120°的空间施加三相电,这个时候,在圆形转筒内相对于转子形成三相电叠加磁场,我们研究的是这个玩意。
Matlab_Simulink中Clark变换和Park变换的深度总结教程文件
M a t l a b_S i m u l i n k中C l a r k变换和P a r k变换的深度总结Matlab_Simulink中Clark变换和Park变换的深度总结最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。
调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。
以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。
基于MATLAB/Simulink中的模块,我也发现了Simulink中和一些书上不一样的地方。
而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。
下面我想基于MATLAB/Simulink深刻的总结一下三相交流控制系统常用的两个变换Clark(3-2)变换和Park(2-2)变换。
首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI调节器。
PI调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。
接下来看看Clark变换(3-2)原理。
由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark变换的作用。
由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。
也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。
变换的原则是投影原则+等幅值等效原则(DPC时用功率等效原则)。
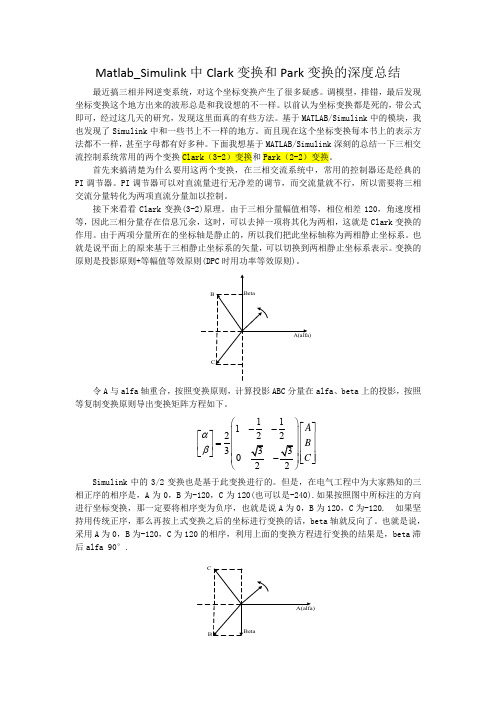
令A与alfa轴重合,按照变换原则,计算投影ABC分量在alfa、beta上的投影,按照等复制变换原则导出变换矩阵方程如下。
111222 333 0A B Cαβ⎛⎫⎡⎤--⎪⎡⎤⎢⎥⎪=⎢⎥⎢⎥⎪⎣⎦⎢⎥-⎪⎣⎦⎝Simulink中的3/2变换也是基于此变换进行的。
但是,在电气工程中为大家熟知的三相正序的相序是,A为0,B为-120,C为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A为0,B为120,C为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta轴就反向了。
FOCClarke变换和Park变换详解(动图+推导+仿真+附件代码)

FOCClarke变换和Park变换详解(动图+推导+仿真+附件代码)⽂章⽬录1 前⾔永磁同步电机是复杂的⾮线性系统,为了简化其数学模型,实现控制上的解耦,需要建⽴相应的坐标系变换,即Clark变换和Park变换。
2 ⾃然坐标系ABC三相永磁同步电机的驱动电路如下图所⽰;根据图⽰电路可以发现在三相永磁同步电机的驱动电路中,三相逆变输出的三相电压为UAU_{A}UA,UBU_{B}UB,UCU_{C}UC将作⽤于电机,那么在三相平⾯静⽌坐标系ABC中,电压⽅程满⾜以下公式:{UA=UmcosθeUB=Umcos(θe+2π3)UC=Umcos(θe−2π3)\begin{cases}U_{A} = U_{m}cos\theta_{e} \\ U_{B} = U_{m}cos(\theta_{e} + \cfrac{2\pi}{3}) \\ U_{C} =U_{m}cos(\theta_{e} - \cfrac{2\pi}{3}) \end{cases}⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧U A=Um c osθe U B=Um c os(θe+32π)UC=Um c os(θe−32π)θe\theta_{e}θe为电⾓度UmU_{m}Um为相电压基波峰值所以根据上述公式可以发现,三相电压的⼤⼩是随时间变化的正弦波形,相位依次相差120°,具体如下图所⽰;3 αβ\alpha\betaαβ坐标系由静⽌三相坐标系ABCABCABC变换到静⽌坐标系αβ\alpha\betaαβ的过程称之为Clarke变换;在αβ\alpha\betaαβ静⽌坐标系中,α\alphaα轴和β\betaβ轴的相位差为90°,且αβ\alpha\betaαβ的⼤⼩是随时间变化的正弦波形,具体如下图所⽰;从⾃然坐标系ABCABCABC 变换到静⽌坐标系αβ\alpha\betaαβ,满⾜以下条件:[fαfβf0]=T3s/2s∗[fAfBfC]\begin{bmatrix} f_{\alpha} \\ f_{\beta} \\ f_{0} \end{bmatrix} = T_{3s/2s}*\begin{bmatrix} f_{A} \\ f_{B} \\ f_{C} \end{bmatrix} ⎣⎡fαfβf0⎦⎤=T3s/2s∗⎣⎡f A f B f C⎦⎤其中T3S/2ST_{3S/2S}T3S/2S为变换矩阵:T3S/2S=N∗[1−12−12032−32222222]T_{3S/2S} = N*\begin{bmatrix} 1 &-\cfrac{1}{2} &-\cfrac{1}{2} \\ \\ 0 &\cfrac{\sqrt{3}}{2} &-\cfrac{\sqrt{3}}{2} \\ \\ \cfrac{\sqrt{2}}{2}&\cfrac{\sqrt{2}}{2} &\cfrac{\sqrt{2}}{2} \end{bmatrix} T3S/2S=N∗⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡1022−212322−21−2322⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤注意:NNN为系数,做等幅值变换和等功率变换NNN系数不同;等幅值变换 N=23N =\cfrac{2}{3}N=32等功率变换 N=23N =\sqrt\cfrac{2}{3}N=32下⾯均为等幅值变换3.1 Clarke变换三相电流ABCABCABC分别为iAi_{A}iA,iBi_{B}iB,iCi_{C}iC,根据基尔霍夫电流定律满⾜以下公式:iA+iB+iC=0i_{A}+i_{B}+i_{C} = 0iA+iB+iC=0静⽌坐标系αβ\alpha\betaαβ,α\alphaα轴的电流分量为iαi_{\alpha}iα,iβi_{\beta}iβ,则Clark变换满⾜以下公式:iα=iAiβ=13∗iA+23∗iBi_{\alpha} = i_{A} \\ \\ i_{\beta} = \cfrac{1}{\sqrt{3}}*i_{A}+\cfrac{2}{\sqrt{3}}*i_{B}iα=iA iβ=31∗iA+32∗iB在matlab的simulink仿真如下图所⽰;最终得到三相电流iAi_{A}iA,iBi_{B}iB,iCi_{C}iC的仿真结果如下;得到αβ\alpha\betaαβ坐标的 iαi_{\alpha}iα和 iβi_{\beta}iβ的仿真结果如下图所⽰;由上述两张图分析可以得到,等幅值Clark变换前后峰值不变,αβ\alpha\betaαβ坐标系中iαi_{\alpha}iα和iβi_{\beta}iβ相位相差90°。
关于Clark变换与Park变换
错误!未找到引用源。
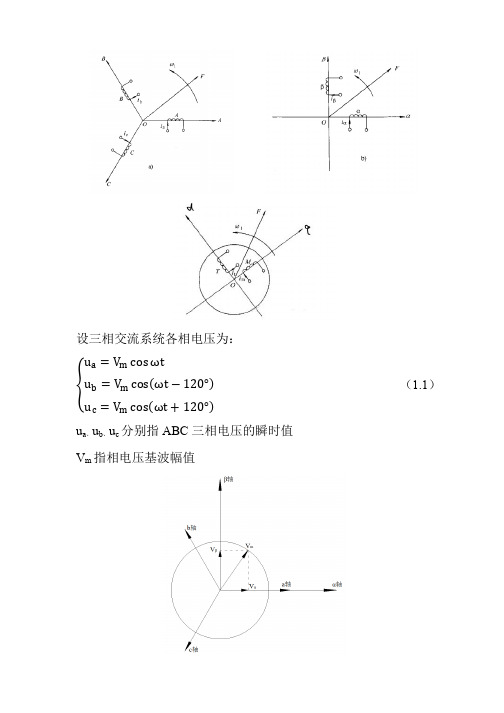
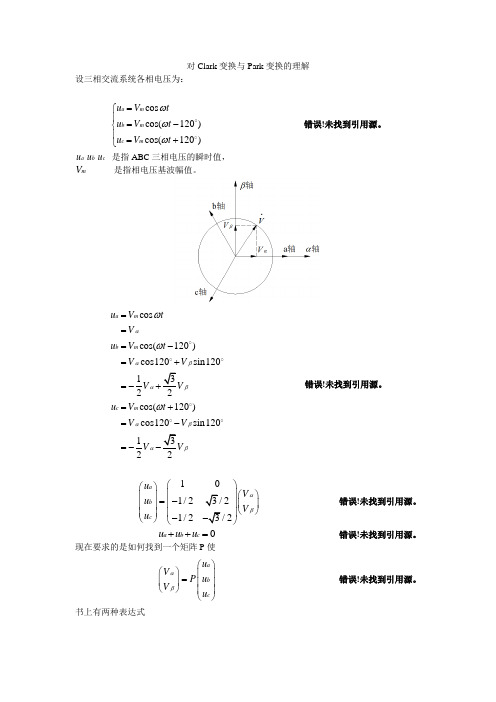
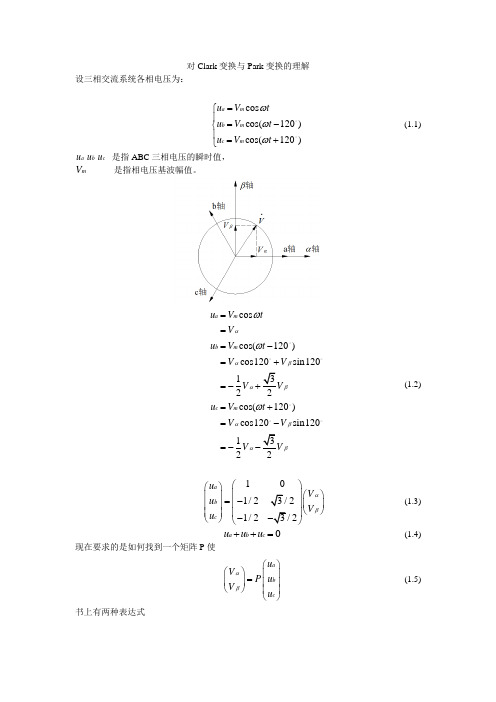
对Clark 变换与Park 变换的理解设三相交流系统各相电压为:cos cos(120)cos(120)a m b m c m u V t u V t u V t ωωω=⎧⎪=-⎨⎪=+⎩错误!未找到引用源。
a u b u c u 是指ABC 三相电压的瞬时值,m V是指相电压基波幅值。
cos cos(120)cos120sin1201322cos(120)cos120sin1201322a mb mc m u V t V u V t V V V V u V t V V V V ααβαβαβαβωωω===-=+=-+=+=-=-- 错误!未找到引用源。
101/23/21/23/2a b c u V u V u αβ⎛⎫⎛⎫⎪⎛⎫ ⎪=- ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪--⎝⎭⎝⎭错误!未找到引用源。
0a b c u u u ++= 错误!未找到引用源。
现在要求的是如何找到一个矩阵P 使a b c u V P u V u αβ⎛⎫⎛⎫ ⎪= ⎪ ⎪⎝⎭ ⎪⎝⎭错误!未找到引用源。
书上有两种表达式11/21/211/21/2223303/23/203/23/2P P ----⎛⎫⎛⎫==⎪⎪--⎝⎭⎝⎭与 错误!未找到引用源。
WHY??为什么非得是这种表达形式?由Clark 变换推出Park 变换cos sin sin cos d q d q u u u u u u αβαααα+=⎧⎨-=⎩ 错误!未找到引用源。
cos sin sin cos d q u u u u αβαααα⎛⎫⎛⎫⎛⎫= ⎪⎪⎪-⎝⎭⎝⎭⎝⎭错误!未找到引用源。
由式(1.7)可以得:22cos sin cos cos sin sin cos sin d q d q u u u u u u αβαααααααα⎧+=⎪⎨-=⎪⎩ 错误!未找到引用源。
两式相加有:cos sin d u u u αβαα=+ 错误!未找到引用源。
park,clark和ipark浅析

原文地址:park,clark和ipark浅析作者:温暖小屋相信做过电动机矢量控制或者直接转矩控制的朋友们肯定会对park,clark,ipark变换再熟悉不过了,肯定有人认为没有必要写这个东西。
其实我写这个东西只是为了加深自己对上面三种变化的理解,因为今天我在调程序的时候,这三个变换把我弄糊涂了。
好,下面先来介绍这三个变换。
Clark变换。
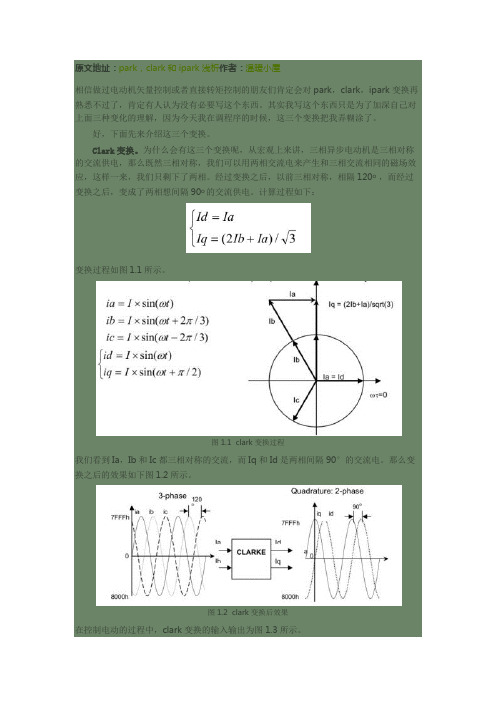
为什么会有这三个变换呢,从宏观上来讲,三相异步电动机是三相对称的交流供电,那么既然三相对称,我们可以用两相交流电来产生和三相交流相同的磁场效应,这样一来,我们只剩下了两相。
经过变换之后,以前三相对称,相隔120o,而经过变换之后,变成了两相想间隔90o的交流供电。
计算过程如下:变换过程如图1.1所示。
图1.1 clark变换过程我们看到Ia,Ib和Ic都三相对称的交流,而Iq和Id是两相间隔90°的交流电。
那么变换之后的效果如下图1.2所示。
图1.2 clark变换后效果在控制电动的过程中,clark变换的输入输出为图1.3所示。
图1.3 clark变换模块图这里As和Bs是想间隔120°的输入正弦信号,而Alpha和Beta是想间隔90°的输出正弦信号。
所以这的As和Bs分别对应上面的Ia和Ib,而Alpha和Beta分别对应上面的Id和Iq。
Park变换。
我们知道,我们现在讨论的坐标都是在定子角度来看的,也就是静止坐标。
我们知道,三相异步电动机是高耦合,非线性,多变量的系统,控制起来非常困难。
矢量控制的思想就是要实现三相电动机的解耦控制,什么意思呢,就是要像控制直流电动机那样去控制三相电动机,可以分别对励磁电流和转矩电流分别控制,有人问,怎么实现,我回答:马上就可以实现。
我们上面说了,clark变换就是将三相变成两相,但这时候还是静止的,但是相对转子是旋转的,我们要实现解耦控制,就要实现坐标相对转子静止,park变换这个时候可以派上用场了。
simulink中拉普拉斯变换
simulink中拉普拉斯变换今天咱们来聊一聊Simulink里超级有趣的拉普拉斯变换。
你们知道吗?在Simulink这个神奇的世界里,就像我们有魔法棒一样,拉普拉斯变换就像是一种特殊的魔法。
比如说,我们有一个小火车在轨道上跑,这个小火车的速度有时候快有时候慢,它的速度变化就好像是一个很复杂的东西。
拉普拉斯变换呢,就像是一个超级相机,它能把这个复杂的速度变化瞬间拍成一张特别的照片,这张照片能让我们更好地去了解这个小火车速度的秘密。
再想象一下,你有一堆五颜六色的积木,你想要知道这些积木堆起来的形状到底有什么规律。
拉普拉斯变换就像是一个智慧的小精灵,它一下子就能把这些积木的组合方式变得特别简单,让我们能清楚地看到其中的奥秘。
在Simulink里,有一个小电路,里面的电流就像调皮的小水滴,一会儿流得快,一会儿流得慢。
如果我们直接去看这个电流的变化,脑袋都要晕啦。
可是,当我们用拉普拉斯变换这个魔法以后呢,就好像把这些调皮的小水滴变成了整齐排列的小珠子,我们可以很轻松地知道电流在不同时候是怎么变化的。
我给你们讲个故事吧。
有个小朋友叫小明,他在Simulink里做一个小项目,是关于一个小机器人的运动的。
这个小机器人的动作一会儿快一会儿慢,小明怎么也搞不明白这个机器人的运动规律。
后来呀,他的老师告诉他拉普拉斯变换这个魔法。
小明就试了试,就像打开了一扇神秘的大门。
他看到了机器人运动的那些复杂的变化,一下子就变得像一条直线一样简单,他就能更好地去控制小机器人的运动啦。
还有一次,有个小团队在Simulink里做一个模拟大风中旗帜飘动的项目。
风一会儿大一会儿小,旗帜飘动得乱七八糟的。
他们用了拉普拉斯变换之后,就好像风变得听话了,旗帜飘动的规律就很清楚地显示出来了。
所以呀,拉普拉斯变换在Simulink里就像是一个超级英雄,它能把那些复杂的、让我们头疼的变化变得简单又有趣。
我们可以用它来探索很多很多好玩的东西,就像在一个充满宝藏的小岛上,拉普拉斯变换就是那把打开宝藏箱子的钥匙呢。
simulink拉氏变换初始值

simulink拉氏变换初始值Simulink是一种用于建模、仿真和分析动态系统的工具,它是MATLAB的一个附加模块。
Simulink可以用来建立复杂的系统模型,并通过仿真来验证系统的性能。
在Simulink中,拉氏变换是一种常用的数学工具,用于将时域信号转换为频域信号。
1. 拉氏变换简介拉氏变换是一种数学工具,用于将时域函数转换为频域函数。
它在信号处理和控制系统设计中起着重要作用。
拉氏变换可以将微分和积分方程转化为代数方程,从而简化复杂系统的分析和设计过程。
2. Simulink中的拉氏变换在Simulink中,可以使用Laplace Transform模块来实现拉氏变换。
该模块提供了一种方便的方式来表示和处理连续时间系统。
3. 拉氏变换的初始值问题在实际应用中,往往需要考虑初始条件对系统行为的影响。
对于连续时间系统,在进行拉氏变换时需要考虑初始值问题。
3.1 初始条件初始条件指定了系统在t=0时刻各个状态量(如位置、速度等)的值。
对于微分方程而言,初始条件通常以初始状态向量的形式给出。
3.2 拉氏变换的初始值问题在进行拉氏变换时,需要将初始条件考虑进去。
具体来说,如果系统在t=0时刻的状态不为零,则需要在拉氏变换中添加一个初始条件项。
4. Simulink中的处理方法Simulink提供了一种方便的方式来处理拉氏变换的初始值问题。
可以使用Initial Condition模块来指定系统在t=0时刻的状态。
4.1 Initial Condition模块Initial Condition模块是Simulink中用于处理系统初始值问题的一个重要模块。
它可以将系统在t=0时刻各个状态量的值作为输入,并将其传递给其他模块进行计算。
4.2 使用Initial Condition模块使用Initial Condition模块需要按照以下步骤进行操作:- 将Initial Condition模块拖放到Simulink模型中;- 连接Initial Condition模块和其他相关模块;- 设置Initial Condition模块的参数,包括输入信号和输出信号等。
Clark变换与Park变换(修订版)
对Clark 变换与Park 变换的理解设三相交流系统各相电压为:cos cos(120)cos(120)a m b m c m u V t u V t u V t ωωω=⎧⎪=-⎨⎪=+⎩(1.1) a u b u c u 是指ABC 三相电压的瞬时值, m V 是指相电压基波幅值。
cos cos(120)cos120sin120132cos(120)cos120sin1201322a mb mc m u V t V u V t V V V u V t V V V ααβαβαβαβωωω===-=+=-+=+=-=-- (1.2)101/23/21/23/2a b c u V u V u αβ⎛⎫⎛⎫⎪⎛⎫ ⎪=- ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪--⎝⎭⎝⎭(1.3)0a b c u u u ++= (1.4)现在要求的是如何找到一个矩阵P 使a b c u V P u V u αβ⎛⎫⎛⎫ ⎪= ⎪ ⎪⎝⎭ ⎪⎝⎭(1.5) 书上有两种表达式11/21/211/21/2223303/23/203/23/2P P ----⎛⎫⎛⎫==⎪⎪--⎝⎭⎝⎭与 (1.6)其中的2/3和根号下的2/3都是经验值,如果用2/3的话后面的park 需要补偿,直接采取根号下2/3就可以。
由Clark 变换推出Park 变换cos sin sin cos d q d q u u u u u u αβαααα+=⎧⎨-=⎩ (1.7) cos sin sin cos d q u u u u αβαααα⎛⎫⎛⎫⎛⎫= ⎪⎪⎪-⎝⎭⎝⎭⎝⎭(1.8)由式(1.7)可以得:22cos sin cos cos sin sin cos sin d q d q u u u u u u αβαααααααα⎧+=⎪⎨-=⎪⎩ (1.9) 两式相加有:cos sin d u u u αβαα=+ (1.10)22cos sin sin sin cos sin cos cos d q d q u u u u u u αβαααααααα⎧+=⎪⎨-=⎪⎩ (1.11) 两式相减有:sin cos q u u u αβαα=- (1.12)可得:cos sin sin cos d q u u u u αβαααα⎛⎫⎛⎫⎛⎫= ⎪⎪⎪-⎝⎭⎝⎭⎝⎭(1.13)(原文这里应该是错了,正确的是第二行的sina 是负的,cosa 是正的,这是我的算法,如果不正确期望大家指正,但是最后仿真结果是对的) 至于clark 和park 的逆变换,矩阵直接求逆即可.说明:当q 轴超前d 轴90度,且a 角为d 轴与A 轴的夹角,这样的话结果就是cos sin sin cos d q u u u u αβαααα⎛⎫⎛⎫⎛⎫= ⎪⎪⎪-⎝⎭⎝⎭⎝⎭和书上的一样。
park,clark和ipark浅析(最新整理)
原文地址:park,clark和ipark浅析作者:温暖小屋相信做过电动机矢量控制或者直接转矩控制的朋友们肯定会对park,clark,ipark变换再熟悉不过了,肯定有人认为没有必要写这个东西。
其实我写这个东西只是为了加深自己对上面三种变化的理解,因为今天我在调程序的时候,这三个变换把我弄糊涂了。
好,下面先来介绍这三个变换。
Clark变换。
为什么会有这三个变换呢,从宏观上来讲,三相异步电动机是三相对称的交流供电,那么既然三相对称,我们可以用两相交流电来产生和三相交流相同的磁场效应,这样一来,我们只剩下了两相。
经过变换之后,以前三相对称,相隔120o,而经过变换之后,变成了两相想间隔90o的交流供电。
计算过程如下:变换过程如图1.1所示。
图1.1 clark变换过程我们看到Ia,Ib和Ic都三相对称的交流,而Iq和Id是两相间隔90°的交流电。
那么变换之后的效果如下图1.2所示。
图1.2 clark变换后效果在控制电动的过程中,clark变换的输入输出为图1.3所示。
图1.3 clark变换模块图这里As和Bs是想间隔120°的输入正弦信号,而Alpha和Beta是想间隔90°的输出正弦信号。
所以这的As和Bs分别对应上面的Ia和Ib,而Alpha和Beta分别对应上面的Id和Iq。
Park变换。
我们知道,我们现在讨论的坐标都是在定子角度来看的,也就是静止坐标。
我们知道,三相异步电动机是高耦合,非线性,多变量的系统,控制起来非常困难。
矢量控制的思想就是要实现三相电动机的解耦控制,什么意思呢,就是要像控制直流电动机那样去控制三相电动机,可以分别对励磁电流和转矩电流分别控制,有人问,怎么实现,我回答:马上就可以实现。
我们上面说了,clark变换就是将三相变成两相,但这时候还是静止的,但是相对转子是旋转的,我们要实现解耦控制,就要实现坐标相对转子静止,park变换这个时候可以派上用场了。
foc控制原理——clark变换和park变换

foc控制原理——clark变换和park变换一、导言在现代电力系统中,频繁使用交流电机作为主要动力源。
而在这些电机中,磁场定向控制(Field-Oriented Control,FOC)技术已经成为一种常见的控制策略。
其主要特点是将交流电机分解为两个独立的控制回路,即电流控制回路和转矩控制回路,以实现快速、准确的控制。
本文将重点介绍FOC控制原理中的两个重要变换——clark变换和park变换。
首先会介绍它们的基本概念和原理,然后会详细讨论它们在FOC控制中的应用。
二、clark变换1. 基本概念clark变换也被称为αβ变换,它是一种将三相交流电压或电流转换为两相直流信号的数学变换方法。
通过clark变换,我们可以将三相电流空间矢量转换为两相坐标系中的两个分量。
这两个分量通常被称为α轴和β轴电流。
2. 原理clark变换的原理可以通过公式表达为:α = aβ = (2/√3) * (b - a/2 - c/2)其中,a、b、c分别代表三相电流的幅值。
通过这些公式,我们可以将三相电流转换为两相αβ坐标系。
3. FOC控制中的应用在FOC控制中,clark变换通常用于将三相电流转换为两相电流。
这样一来,我们就可以将三相交流电机的控制问题转化为两相电机的控制问题,从而简化了整个系统的控制难度。
三、park变换1. 基本概念park变换也被称为dq变换,它是一种将αβ坐标系中的两相信号转换为dq坐标系中的信号的数学变换方法。
在FOC控制中,park变换用于将电机状态转换为以磁场和转矩为坐标轴的坐标系中,从而方便进行磁场定向控制。
2. 原理park变换的原理可以通过公式表达为:d = α * cos(θ) + β * sin(θ)q = -α * sin(θ) + β * cos(θ)其中,α、β代表αβ坐标系中的两相信号,θ代表旋转角度。
通过这些公式,我们可以将αβ坐标系中的信号转换为dq坐标系中的信号。
基于Simulink的三相逆变SVPWM的仿真实现(精)

Simulink 是MTALAB 最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在实际设计之前利用Simulink 进行仿真不仅可以降低设计成本,还能及时发现设计中存在的问题,加以改正。
本文给出了基于Simulink 的SVPWM控制策略仿真的全过程和结果。
1SVPWM 的原理介绍SVPWM ,即空间电压矢量控制法,它的主要思想[1]是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM 波,以所形成的实际磁链矢量来追踪其准确磁链圆。
传统的SPWM 方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而空间电压矢量控制法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
相比于传统的SPWM 法,SVPWM 有如下特点[2]:1)在每个小区间虽有多次开关切换,但每次开关切换只涉及一个器件,所以开关损耗小。
2)利用电压空间矢量直接生成三相PWM 波,计算简单。
3)逆变器输出线电压基波最大值为直流侧电压,比一般的SPWM 逆变器输出电压高15%SVPWM 控制的实现[3]通常有以下几步:(1)坐标的变换三相逆变系统有三组桥臂,设a 、b 、c 分别表示三组桥臂的开关状态,上桥臂导通下桥臂关断时其值为1,反之则为0。
那么可以得到三相逆变器输出的相电压和线电压之间的关系如下:V a V b V c 22222222=V dc 2-1-1-12-1-1-1222a b 22c(1)其中,V dc 为逆变桥直流电压,令U=[a,b ,c]表示一个矢量,当a 、b 、c 分别取1或者0的时候,该矢量就有8中工作状态,分别为[0,0,0],[0,0,1],[0,1,0],[0,1,1],[1,0,0],[1,0,1],[1,1,0],[1,1,1],如果我们用U 0和U 7表示零矢量,就可以得到6个扇区,三相控制可以用一个角速度为W=2πF 的空间矢量电压U 表示,当U 遍历圆轨迹时,形成三相瞬时输出电压,理论证明,当U 落入某一扇区后,用该扇区两边界矢量和零矢量去合成U 可以得到最佳合成效果。
余弦信号经过克拉克变换与帕克变换的意义
余弦信号经过克拉克变换与帕克变换的意义摘要:一、引言二、克拉克变换与帕克变换的定义及原理1.克拉克变换2.帕克变换三、余弦信号经过克拉克变换与帕克变换的意义1.信号参数的提取与分析2.信号处理的便捷性与高效性四、克拉克变换与帕克变换在工程应用中的实例五、总结与展望正文:一、引言在信号处理领域,克拉克变换(Clarke Transformation)与帕克变换(Park Transform)是两种常见的信号变换方法。
它们主要用于将时域信号转换为频域信号,以便于对信号进行更深入的分析。
本文将探讨余弦信号经过这两种变换的意义及其在工程应用中的实例。
二、克拉克变换与帕克变换的定义及原理1.克拉克变换克拉克变换是一种双线性变换,可以将时域信号的幅度和相位信息分离。
对于一个余弦信号,通过克拉克变换,可以得到其频域信号的表达式为:S(jω) = A(ω) * exp(-jφ(ω))其中,A(ω)表示信号的幅度谱,φ(ω)表示信号的相位谱。
2.帕克变换帕克变换是一种单线性变换,也可以将时域信号的幅度和相位信息分离。
与克拉克变换不同的是,帕克变换可以将信号的相位信息转换为频域信号的幅度信息。
对于一个余弦信号,通过帕克变换,可以得到其频域信号的表达式为:S(jω) = A(ω) * exp(-jθ(ω))其中,A(ω)表示信号的幅度谱,θ(ω)表示信号的相位谱。
三、余弦信号经过克拉克变换与帕克变换的意义1.信号参数的提取与分析通过克拉克变换和帕克变换,我们可以将余弦信号的时域参数(幅度和相位)转换为频域参数。
这有助于我们更好地分析信号的频率特性,如幅频特性和相频特性。
2.信号处理的便捷性与高效性将信号转换为频域后,可以利用频域信号进行各种信号处理方法,如滤波、信号调制等。
与直接在时域进行信号处理相比,频域处理具有更高的效率和灵活性。
四、克拉克变换与帕克变换在工程应用中的实例1.通信系统在通信系统中,信号的调制与解调通常采用克拉克变换或帕克变换。
Matlab_Simulink中Clark变换和Park变换的深度总结
Matlab_Simulink 中Clark 变换和Park 变换的深度总结 最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。
调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。
以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。
基于MATLAB/Simulink 中的模块,我也发现了Simulink 中和一些书上不一样的地方。
而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。
下面我想基于MATLAB/Simulink 深刻的总结一下三相交流控制系统常用的两个变换Clark (3-2)变换和Park (2-2)变换。
首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI 调节器。
PI 调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。
接下来看看Clark 变换(3-2)原理。
由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark 变换的作用。
由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。
也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。
变换的原则是投影原则+等幅值等效原则(DPC 时用功率等效原则)。
令A 与alfa 轴重合,按照变换原则,计算投影ABC 分量在alfa 、beta 上的投影,按照等复制变换原则导出变换矩阵方程如下。
11122230A B C αβ⎛⎫⎡⎤-- ⎪⎡⎤⎢⎥ =⎢⎥⎢⎥ ⎣⎦⎢⎥ ⎣⎦⎝ Simulink 中的3/2变换也是基于此变换进行的。
但是,在电气工程中为大家熟知的三相正序的相序是,A 为0,B 为-120,C 为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A 为0,B 为120,C 为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta 轴就反向了。
clark park变换原理

clark park变换原理摘要:一、引言二、Clark Park变换的背景与动机三、Clark Park变换的基本原理四、Clark Park变换的应用场景五、Clark Park变换在我国的发展现状六、展望Clark Park变换的未来趋势七、总结正文:一、引言随着科技的不断发展,变换原理在各个领域得到了广泛的应用。
其中,Clark Park变换作为一种重要的数学变换,不仅在理论研究中具有重要意义,同时在实际应用中也发挥着举足轻重的作用。
本文将对Clark Park变换的背景、基本原理、应用场景等进行详细介绍,并对其在我国的发展现状和未来趋势进行展望。
二、Clark Park变换的背景与动机Clark Park变换起源于20世纪60年代,由美国数学家Clark Park提出。
当时,随着计算机科学和信息论的迅猛发展,对于高效、简洁的变换方法的需求日益增长。
Clark Park变换应运而生,旨在为信号处理、图像处理等领域提供一种简单、高效的变换方法。
三、Clark Park变换的基本原理Clark Park变换是一种线性时不变变换,具有可逆性、正交性等特点。
其基本原理是将原始信号从时域转换到频域,再通过频域的某些特性进行分析和处理。
与傅里叶变换、小波变换等传统变换方法相比,Clark Park变换在保持信号原始特性的同时,具有更高的计算效率和更少的冗余信息。
四、Clark Park变换的应用场景Clark Park变换在众多领域均有广泛应用,如信号处理、图像处理、数据压缩、模式识别等。
其应用场景包括:1.信号分析与处理:Clark Park变换可以将信号从时域转换到频域,便于分析信号的频率特性,从而进行滤波、去噪等处理。
2.图像处理:Clark Park变换可以应用于图像的频域分析,如边缘检测、纹理分析等,从而实现图像的增强、降噪和分割等处理。
3.数据压缩:Clark Park变换可以将原始数据转换为低频域表示,去除冗余信息,实现数据的压缩。
坐标变换总结Clark变换和Park变换
一个坐标系的坐标变换为另一种坐标系的坐标的法则。
由于交流异步电动机的电压、电流、磁通和电磁转矩各物理量之间是相互关联的强耦合,并且其转矩正比与主磁通与电流,而这两个物理量是随时间变化的函数,在异步电机数学模型中将出现两个变量的乘积项,因此,又为多变量,非线性系统(关键是有一个复杂的电感矩阵),这使得建立异步电动机的准确数学模型相当困难。
为了简化电机的数学模型,需从简化磁链入手。
解决的思路与基本分析:1.已知,三相( ABC )异步电动机的定子三相绕组空间上互差120度,且通以时间上互差120ω的旋转磁场。
度的三相正弦交流电时,在空间上会建立一个角速度为1又知,取空间上互相垂直的(α,β)两相绕组,且在绕组以互差90度的两相平衡交流电流时,也能建立与三相绕组等效的旋转磁场。
此时的电机数学模型有所简化。
2. 还知, 直流电机的磁链关系为:F---励磁绕组轴线---主磁通的方向,即轴线在d轴上,称为直轴(Direct axis)。
A---电枢绕组轴线---由于电枢绕组是旋转的,通过电刷馈入的直流电产生电枢磁动势,其轴线始终被限定在q轴,即与d轴成90度,称为交轴(Quadrature axis)。
由于q轴磁动势与d轴主磁通成正交,因此电枢磁通对主磁通影响甚微。
换言之,主磁通唯一地由励磁电流决定,由此建立的直流电机的数学模型十分简化。
如果能够将三项交流电机的物理模型等效的变换成类似的模型,分析和控制就变得大大简单了。
电机模型彼此等效的原则:不同坐标系下产生的磁动势(大小、旋转)完全一致。
关于旋转磁动势的认识:1) 产生旋转磁动势并不一定非要三相绕组不可。
结论是:除了单相电机之外,两相、三相或四相等任意对称(空间)的多相绕组,若通以平衡的多相电流,都可产生旋转磁动势。
根据这一道理,利用其在空间上互差90度的静止绕组,并通以时间上互差90度的平衡交流电流,同样可产生旋转磁场(或磁动势F),因而可等效代替三相绕组的作用。
Park-Clark-变换公式及锁相的推导

1 2 3 0
1 2 3 2
1 2 3 2 ,
V 因此: V
或:
1 2 3 0
1 2 3 2
1 Va 2 Vb 3 Vc 2
2 1 1 V (Va Vb Vb) 3 2 2 1 1 2 (Vm * cos t Vm * cos(t 120 ) Vm * cos(t 120 )) 3 2 2 1 2 (Vm * cos t * Vm * 2 * (cos t * cos120 )) 3 2 2 1 * (Vm * cos t Vm * cos t ) 3 2 Vm * cos t
也可由 Vd,Vq 反推 Va,Vb,Vc
1 0 Va 1 3 V Vb 2 V Vc 2 1 3 2 2 0 1 1 3 cos sin Vd Vq 2 sin cos 2 1 3 2 2 cos sin Vd cos( 120 ) sin( 120 ) cos( 120 ) sin( 120 ) Vq
1 | 1 0 0 2 2) (1) /(3) (1) 1 | 0 2 0 ( 1 |0 0 2 0 1)*6 ( 3 ) 0 ( 2 4 2 2 (1) ( 2 ) ( 3) / 3 2 3 6 0 3 3 3 3 3 3 3 3 1 1 3 3 3 3 3 3 2 2 3 3
即:
Vd Vm * cos( t ) Vq Vm * sin( t )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Matlab_Simulink 中Clark 变换和Park 变换的深度总结 最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。
调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。
以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。
基于MATLAB/Simulink 中的模块,我也发现了Simulink 中和一些书上不一样的地方。
而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。
下面我想基于MATLAB/Simulink 深刻的总结一下三相交流控制系统常用的两个变换Clark (3-2)变换和Park (2-2)变换。
首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI 调节器。
PI 调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。
接下来看看Clark 变换(3-2)原理。
由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark 变换的作用。
由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。
也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。
变换的原则是投影原则+等幅值等效原则(DPC 时用功率等效原则)。
令A 与alfa 轴重合,按照变换原则,计算投影ABC 分量在alfa 、beta 上的投影,按照
等复制变换原则导出变换矩阵方程如下。
11122230A B C αβ⎛⎫⎡⎤-- ⎪⎡⎤⎢⎥ =⎢⎥⎢⎥ ⎣⎦⎢⎥ ⎣⎦⎝ Simulink 中的3/2变换也是基于此变换进行的。
但是,在电气工程中为大家熟知的三相正序的相序是,A 为0,B 为-120,C 为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A 为0,B 为120,C 为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta 轴就反向了。
也就是说,采用A 为0,B 为-120,C 为120的相序,利用上面的变换方程进行变换的结果是,beta 滞后alfa 90°.
下面再看Simulink中的波形图。
这是传统的正序的三相正弦交流电。
(A为0,B为120,C为-120)下面用Simulink自带的坐标变换模块进行3/2变换。
波形如下。
可以看到,当alfa(黄)为0的时候,beta(蓝)为-90也就验证了上面说的。
所以采用MATLAB自带的模块,变换传统正序的时候并不能让beta超前alfa 90°,反而滞后90°那么如何去修正很简单,直接将变换矩阵第二行所有元素的符号反号即可。
即:
11 1
222 333 0-
22A B C
αβ⎛⎫⎡⎤--
⎪
⎡⎤⎢⎥
⎪
=
⎢⎥⎢⎥
⎪
⎣⎦⎢⎥
⎪⎣⎦
⎝⎭
修改后:
A(alfa)
C
B
Beta
可以看到这是beta已经超前于alfa 90° 了。
本来以为可以解决问题了,然后发现Park变换波形居然是交流。
下面讨论Park变换。
Park变换的目的是将两相交流转换为两相直流。
原理是将原本平面静止的两相坐标系
以同平面旋转矢量相同的角速度旋转起来,与其相对静止,这时原来的旋转矢量可以看做是相对于坐标系静止的直流分量。
称这两分量为d, q 分量。
一般的教材如上图所示,通过投影原则,得出变换矩阵方程如下:
cos sin sin cos d q θθαθθβ⎡⎤⎛⎫⎡⎤= ⎪⎢⎥⎢⎥-⎣⎦⎝⎭⎣⎦
如果用以上我们修改之后的3-2变换矩阵得到的alfa ,beta 用来这里的2-2变换,照道理可以通过此图得到直流分量。
但是在Simulink 却是交流,而不是直流。
但如果用它自带的3-2变换得到的alfa ,beta 用来这里的2-2变换,可以得到正确的直流分量,但q 轴分量为负(从这幅图上看当基于D 轴定向时,q 轴应该为正,应为q 轴超前d 轴90°)。
这是怎么回事呢 这时我就试着从其它自带的模块开始研究,也就是在下图上看出一些问题。
可以看到,这里的beta 是滞后的,若用这个标准按照上面2-2变换得到下图。
q
只有这样可以说的同,也就是说按照自带模块的变换原则,就如上图所示,若基于d 轴定向,这输出波形为:
这里可以看到由于们定义的旋转方向和theta 相反,所以这里是个Q 是个负的。
其实simulink 是默认的顺时针为旋转正方向,我们们默认的是逆时针旋转方向,也就是theta 正负的问题,因此如果要采用书上的标准,如下图。
A(alfa)
C B Beta
Beta d
q theta
3-2变换 2-2变换
不仅要将3-2变换矩阵改过来,而且也要讲锁相环出来的theta 角度变为负数,或者直接将2-2变换矩阵中的theta 反号。
这样就可以完全和书上的对应。
下图可以见到,若以d 轴定向,则d 分量为0,q 分量为正的幅值,和上面的图对应起来
所以总结一下,若采用顺时针旋转模式(Simulink 模式),则保持原来两个矩阵不动。
111cos sin 222
sin cos 333022A d B q C θθθθ⎛⎫⎡⎤-- ⎪⎡⎤⎛⎫⎢⎥ ⎪= ⎪⎢⎥⎢⎥- ⎪⎣⎦⎝⎭⎢⎥- ⎪⎣⎦⎝⎭ 若采用逆时针模式(习惯模式),则3-2变换中第二行元素反号,theta 反号。
111cos sin 222sin cos 33
3022A d B q C θθθθ⎛⎫⎡⎤-- ⎪-⎡⎤⎛⎫⎢⎥ ⎪= ⎪⎢⎥⎢⎥ ⎪⎣⎦⎝⎭⎢⎥- ⎪⎣⎦⎝⎭
其实归根到底就是一个旋转方向的问题。
By 蓝光三角洲 Blueray @ CQU.。