《现代控制理论(第三版)》答案刘豹-唐万生编
《现代控制理论》(刘豹_唐万生)
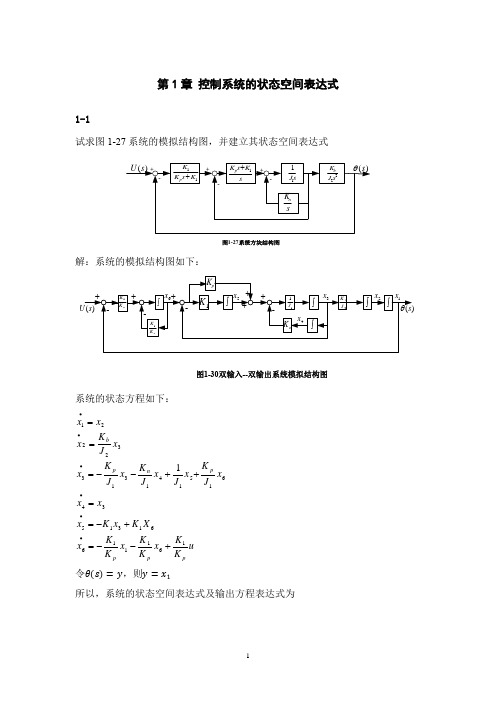
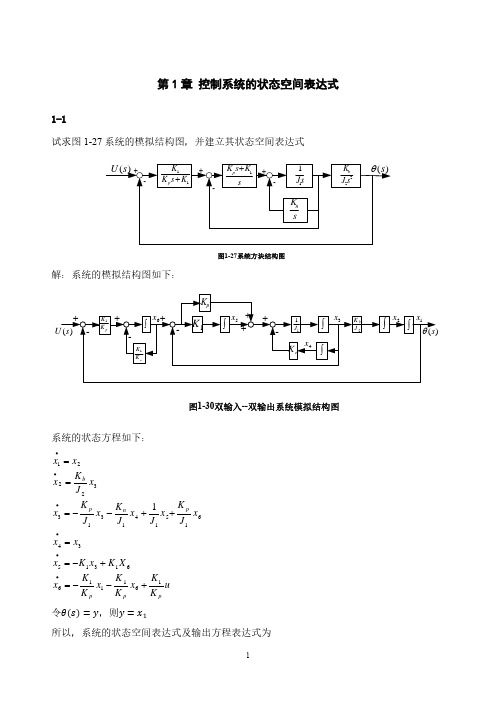
第1章 控制系统的状态空间表达式1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令θ(s)=y ,则y =x 1所以,系统的状态空间表达式及输出方程表达式为[ x 1•x 2•x 3•x 4•x 5•x 6•]=[ 01000000K b J 200000−K p J 1−K n J 11J K p J 100100000−K 100K 1−K 1p−K 1p ][ x 1x 2x 3x4x 5x 6]+[ 00000K 1K p ]uy =[100000][ x 1x 2x 3x 4x 5x 6]1-2有电路如图1-28所示。
以电压u(t)为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R 2上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令i 1=x 1,i 2=x 2,u c =x 3,输出量y =R 2x 2 有电路原理可知:R 1x 1+L 1x 1•+x 3=uL 2x •2+R 2x 2=x 3x 1=x 2+Cx 3•既得 x 1•=−R1L 1x 1−1L 1x 3+1L 1ux •2=−R 2L 2x 2+1L 2x 3 x 3•=−1C x 1+1C x 2y =R 2x 2写成矢量矩阵形式为:[ x 1。
x 2。
x 3。
] =[−R 1L 10−1L 10−R 2L 21L 21C−1C 0][x 1x 2x 3]+[1L 100]u y =[0R 20][x 1x 2x 3] 1-3有机械系统如图1.29所示,M1和M2分别受外力f1和f2的作用.求以M1和M2的运动速度为输出的状态空间表达式.解:以弹簧的伸长度y 1,y 2 质量块M 1, M 2的速率c 1,c 2作为状态变量 即 x 1=y 1,x 2=y 2,x 3=c 1,x 4=c 2根据牛顿定律,对M 1有:M 1dc1dt =f 1-k 1(y 1-y 2)-B 1(c 1-c 2) 对M 2有:M 2dc2dt =f 2+k 1(y 1-y 2)+B 1(c 1-c 2)-k 2y 2-B 2c 2将x 1,x 2,x 3,x 4代入上面两个式子,得 M 1ẋ3=f 1-k 1(x 1-x 2)-B 1(x 3-x 4) M 2ẋ4=f 2+k 1(x 1-x 2)+B 1(x 3-x 4)-k 2x 2-B 2x 4B 1\y 2 c 2 y 1 c 1f 2(t)M 2M 1f 1(t) B 2 K 2K 1整理得 ẋ1=x 3ẋ2=x 4ẋ3=1M 1f 1-k 1M 1x 1+k 1M 1x 2-B 1M 1x 3+B1M 1x 4ẋ4=1M 2f 2+k1M 2x 1-k 1+k 2M 2x 2+B1M 2x 3-B 1+B 2M 2x 4输出状态空间表达式为 y 1=c 1=x 3 y 2=c 2=x 4 1-4两输入u 1,u 2,两输出y 1,y 2的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
《现代控制理论》刘豹著(第3版)课后习题答案(最完整版)

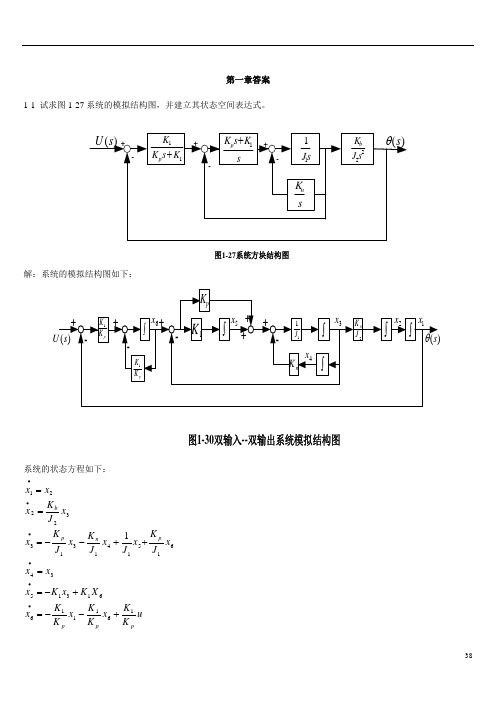
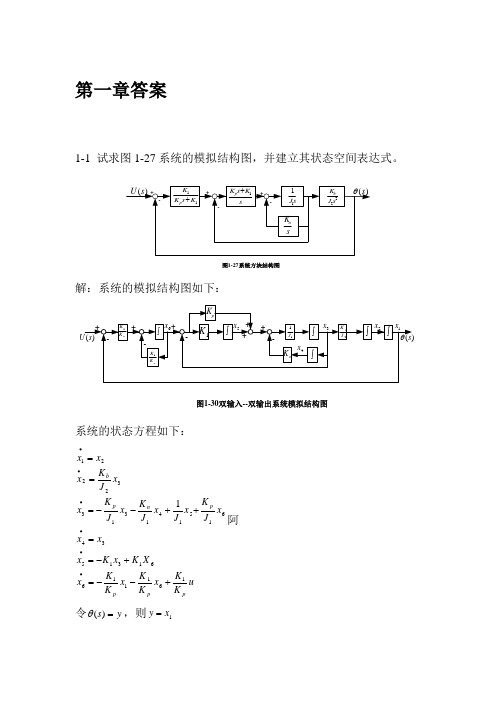
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
现代控制理论第3版(刘豹_唐万生)课后答案资料
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》刘豹著(第3版)课后习题答案
《现代控制理论》刘豹著(第3版)课后习题答案解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
《现代控制理论》刘豹著(第3版)课后习题答案
《现代控制理论》刘豹著(第3版)课后习题答案解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
《现代控制理论》刘豹著(第3版)课后习题答案

《现代控制理论》刘豹著(第3版)课后习题答案解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
《现代控制理论(第三版)》答案刘豹_唐万生编
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x x x x K K KK K K J K J J K J KJ K x x x x x xp p p p n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论刘豹课后习题答案
现代控制理论刘豹课后习题答案现代控制理论刘豹课后习题答案现代控制理论是控制工程领域中的重要学科,它研究如何通过数学模型和控制算法来设计和实现系统的稳定性、鲁棒性和性能优化。
刘豹是现代控制理论领域的知名专家,他的课程教材被广泛应用于高校和工程实践中。
在学习过程中,课后习题是检验学生理解和掌握程度的重要方式。
下面将为大家提供一些现代控制理论刘豹课后习题的答案,希望能对大家的学习有所帮助。
1. 题目:给定一个连续时间系统的传递函数为G(s)=1/(s^2+2s+1),请计算系统的阶数和极点。
答案:系统的传递函数为二阶,因为分母的最高次项为s^2。
根据传递函数的分母,我们可以得到系统的极点为-1。
2. 题目:对于一个开环稳定的连续时间系统,如果将一个负反馈环节加入系统中,会对系统的稳定性产生什么影响?答案:负反馈环节的引入可以提高系统的稳定性。
通过负反馈,系统可以对外部干扰和参数变化做出相应的调节,使得系统能够保持稳定工作。
3. 题目:对于一个连续时间系统,如果系统的传递函数为G(s)=K/(s+a),其中K 和a为常数,当a的值为正时,系统的稳定性如何?答案:当a的值为正时,系统的稳定性取决于K的值。
如果K大于零,系统是稳定的;如果K小于零,系统是不稳定的。
4. 题目:对于一个连续时间系统,如果系统的传递函数为G(s)=1/(s^3+3s^2+3s+1),请计算系统的零点和极点。
答案:系统的传递函数为三阶,因为分母的最高次项为s^3。
根据传递函数的分母,我们可以得到系统的极点为-1。
由于分子为常数1,系统没有零点。
5. 题目:对于一个连续时间系统,如果系统的传递函数为G(s)=K/(s^2+2ξω_ns+ω_n^2),其中K、ξ和ω_n为常数,当ξ的值为1时,系统的稳定性如何?答案:当ξ的值为1时,系统的稳定性取决于K的值。
如果K大于零,系统是稳定的;如果K小于零,系统是不稳定的。
以上是对于现代控制理论刘豹课后习题的一些答案解析。
现代控制理论课后习题参考答案刘豹唐万生第三版
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第14/18页) [ -6-11 22:41:46]
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第15/18页) [ -6-11 22:41:46]
现代控制理论习题参考答案
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第10/18页) [ -6-11 22:41:46]
现代控制理论习题参考答案
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第11/18页) [ -6-11 22:41:46]
现代控制理论习题参考答案
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第8/18页) [ -6-11 22:41:46]
现代控制理论习题参考答案
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第9/18页) [ -6-11 22:41:46]
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸2.htm(第18/18页) [ -6-11 22:41:46]
现代控制理论习题参考答案
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸3.htm(第1/15页) [ -6-11 22:43:09]
:8081/31zdhx/kzll/ÏÖ´ú¿ØÖÆÀíÂÛÏ°Ìâ²Î¿¼´ð°¸3.htm(第2/15页) [ -6-11 22:43:09]
《现代控制理论》第3版(刘豹_唐万生)课后习题答案
(本题思路:使用教材 P41 方法,专门用来把传递函数转化为约旦标准型)
6
7
10(−1)
解:(1)由 () = (+1)(+3)可得到系统表达式为
6(+1)
−4
−
10
3
3
(2)() = (+2)(+3)2 = (+3)2 + +3 + +2 +
2
则状态空间表达式为:
.
1
0
1
0 1
0
.
[2 ] = [ 0
0
1 ] [2 ] + [0]
.
−3 −7 −5 3
1
3
1
= [2 3 1] [ 2 ]
3
相应的模拟结构图如下:
1
3
+
u
-
-
2
+
+
y
5
x3
x2
x1
7
3
1-6
(−)
(+)
已知系统传递函数(1)() = (+)(+) (2)() = (+)(+)
11
0
1
0 11
当1 = −1时,[ 3
0
2 ] [21 ] = − [21 ]
31
−12 −7 −6 31
10
解得: 21 = 31 = −11
(或令11
令11 = 1
11
1
1 = [21 ] = [−1]
31
现代控制理论(刘豹、唐万生)第3章答案总结

3-6已知系统的微分方程为:u y y y y 66116......=+++ 试写出其对偶系统的状态空间表达式及其传递函数。
解:63611603210=====b a a a a ,,,, 系统的状态空间表达式为[] x006y u 100x 6116100010 =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x &传递函数为[]6116610061161001006A)-C(sI )(2311-+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--==-s s s s s sB s W其对偶系统的状态空间表达式为:[] x10y u006x 6101101600=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x传递函数为61166)(23+--=s s s s W3-7已知能控系统的A,b 阵为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=11,4321b A 试将该状态方程变换为能控标准型。
解:该状态方程的能控性矩阵为[]⎥⎦⎤⎢⎣⎡-==7111Ab bM rankM=2,矩阵非奇异,系统能控。
系统特征多项式:105||2+-=-λλλA I可知a1=-5,a0=10。
所以⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡--=510101010a a A u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=10 51010·此即为该状态方程的能控标准形。
取P=T C -1该状态方程的能控性矩阵为[]⎥⎦⎤⎢⎣⎡-==7111Ab bM 知它是非奇异的。
求得逆矩阵有,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-818181871M由[][]111 10--=bAAb bP n 得[][]⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==-818181818187101011MP 同理,由A P P 12=得⎥⎦⎤⎢⎣⎡=43412P 从而得到P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=4341818121P P P ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-81418143811P由此可得,⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎦⎤⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==-51010641321641323 4321 434181811PAPA ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==1011 43418181Pb b所以,u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=10 51010·此即为该状态方程的能控标准形。
《现代控制理论》第3版刘豹课后习题答案完整免费

《现代控制理论参考答案》第三版第一章答案1-1 试求图 1-27 系统的模拟结构图,并建立其状态空间表达式。
U (s) +K1+Kps K1+1K b(s)-K p s K1s-J1s J2s2-K ns图1-27系统方块结构图解:系统的模拟结构图如下:K p+K1+x x++1x K b x xU(s)K p-K1+-J1J2(s) --K1x4K nK p图1-30双输入--双输出系统模拟结构图系统的状态方程如下:x1x2x 2K b x3J 2x3K p K nx41K p x3J1x5x6 J1J1J1x4x3x5K 1 x3K1X6x6K1 x1K1 x6K1 u K p K p K p令(s)y ,则y x1所以,系统的状态空间表达式及输出方程表达式为0 1 0 0 0 0x 1K b 00 x 1 0x 2J 2 0x 2K p K n 1 K p 0 x 3 0x 3J 1 J 1 J J 1 0 ux 4 x 40 1 0 0 0 00 K 1 0 0 K 1 x 5x 5K 1x 6x 6K 1 0K 1 K pK pK px 1x 2 y1 0 0 00 0x 3 x 4 x 5x 61-2 有电路如图 1-28 所示。
以电压 u(t ) 为输入量, 求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻 R 2上的电压作为输出量的输出方程。
R1 L1 L2i1i2C--------- UUc R2---------图1-28 电路图解:由图,令 i 1 x 1 , i 2x 2 , u cx 3 ,输出量 y R 2 x 2x 1R 1 x 11x 3 1 uR 1 x 1 L 1 x 1 x 3uL 1 L 1L 1R 21x 3L 2 xR 2 x 2 x 3x 2x 2有电路原理可知:2既得L 2L 2x 1x 2 C x 3x 31x 11x 2CCy R 2 x 2写成矢量矩阵形式为:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••阿 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
1u 2u 图1-30双输入--双输出系统模拟结构图解:系统的状态空间表达式如下所示:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡432121432134561243210101000000100100010x x x x y u b b x x x x a a a a a a x x x x &&&&⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-3456121010001)(a a a s a as a sA sI ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-=--211345612100000001010001)()(b b a a a s a as a sB A sI s W ux []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-=--2113456121000000010100010101)()(b b a a a s a as a sB A sIC s W uy1-5系统的动态特性由下列微分方程描述u u u y y y y 23375)2(......++=+++K列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡321321321132100573100010x x x y u x x x x x x 。
相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡432143214321313310411100000020*********x x x x y u x x x x x x x x &&&&1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x &&&‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W )1)(2)(3()3(2)3(2+++=+++=-s s s s s s A sI()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=--)2)(1(150)3()3(2033)1)(2)(3(1)(21s s s s s s s s s s s s A sI ()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=-=-)3)(12()3()3()1)(2)(3(1210)2)(1(150)3()3(2033)1)(2)(3(1)()(21s s s s s s s s s s s s s s s s s s s s B A sI s W ux[])1)(2()12()1)(2)(3(1)3)(12()3()3(100)()(1+++=+++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=-=-s s s s s s s s s s s B A sI C s W uy 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P (或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P (或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得:133313233,3p p p p =-= 令113=p 得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型(并联分解)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x &&&(2)解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 1,332,1==λλ当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=101201011T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-1102112101T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-4325183572131102112101B T⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=302413101201011110021CT 约旦标准型x ~y ux ~x ~⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=302413432518100030013&第二章答案2-4 用三种方法计算以下矩阵指数函数At e 。
(2) A=1141⎛⎫⎪⎝⎭解:第一种方法: 令 0I A λ-= 则11041λλ--=-- ,即()2140λ--=。
求解得到13λ=,21λ=- 当13λ=时,特征矢量11121p p p ⎡⎤=⎢⎥⎣⎦由 111Ap p λ=,得11112121311341p p p p ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦即112111112121343p p p p p p +=⎧⎨+=⎩,可令112p ⎡⎤=⎢⎥⎣⎦当21λ=-时,特征矢量12222p p p ⎡⎤=⎢⎥⎣⎦由222Ap p λ=,得121222221141p p p p -⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦即1222121222224p p p p p p +=-⎧⎨+=-⎩ ,可令212p ⎡⎤=⎢⎥-⎣⎦则1122T ⎡⎤=⎢⎥-⎣⎦,111241124T -⎡⎤⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦3333311111111024224422111102422t tt t tAt t t t t t e ee e ee e e e e e -----⎡⎤⎡⎤+-⎢⎥⎢⎥⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎢⎥⎣⎦-++⎢⎥⎢⎥⎣⎦⎣⎦第二种方法,即拉氏反变换法:1141s sI A s --⎡⎤-=⎢⎥--⎣⎦[]()()11114131s sI A s s s --⎡⎤-=⎢⎥--+⎣⎦()()()()()()()()113131413131s s s s s s s s s s -⎡⎤⎢⎥-+-+⎢⎥=⎢⎥-⎢⎥-+-+⎣⎦1111112314311111131231s s s s s s s s ⎡⎤⎛⎫⎛⎫++ ⎪⎪⎢⎥-+-+⎝⎭⎝⎭⎢⎥=⎢⎥⎛⎫-+⎢⎥⎪-+-+⎝⎭⎣⎦()331133111122441122t t t t At t t t t e e e e e L sI A e e e e ------⎡⎤+-⎢⎥⎡⎤=-=⎢⎥⎣⎦⎢⎥-+⎢⎥⎣⎦第三种方法,即凯莱—哈密顿定理 由第一种方法可知13λ=,21λ=-313303113131344441111114444t t t t t t t t e e e e e e e e -----⎡⎤⎡⎤+⎢⎥⎢⎥∂⎡⎤⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥∂-⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦3333331111101113132244014111444422t tt t At t t t t t t t t e e e e e e e e e e e e e ------⎡⎤+-⎢⎥⎡⎤⎡⎤⎛⎫⎛⎫=+++=⎢⎥ ⎪ ⎪⎢⎥⎢⎥⎝⎭⎝⎭⎣⎦⎣⎦⎢⎥-+⎢⎥⎣⎦2-5 下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A 阵。